万方数据
第6期王云萍等:基于DMD的动态红外景象仿真系统967
O引言
随着红外热成像技术的发展与应用,红外成像探测、跟踪、制导武器得到了高速发展。为了对红外热成像系统性能进行评估,需要进行大量的外场飞行试验。因外场飞行试验费钱耗时,可重复性差,系统不可能经历所有的场合,人们期望在室内通过半实物仿真的方法,模拟生成红外景象,进行系统测试。20世纪90年代末,美国光科学公司研发了新型红外景象模拟系统——DMD动态红外投影系统。与其他系统相比,基于DMD的动态红外景象模拟系统具有图像空间分辨率高、图像刷新频率高、图像灰度等级可精确控制、核心器件已商品化等优点。我国的红外景象模拟技术比较落后,以DMD为核心器件的动态红外仿真系统为高性能红外景象仿真提供了一种新的途径n钏。
1系统基本组成与工作原理
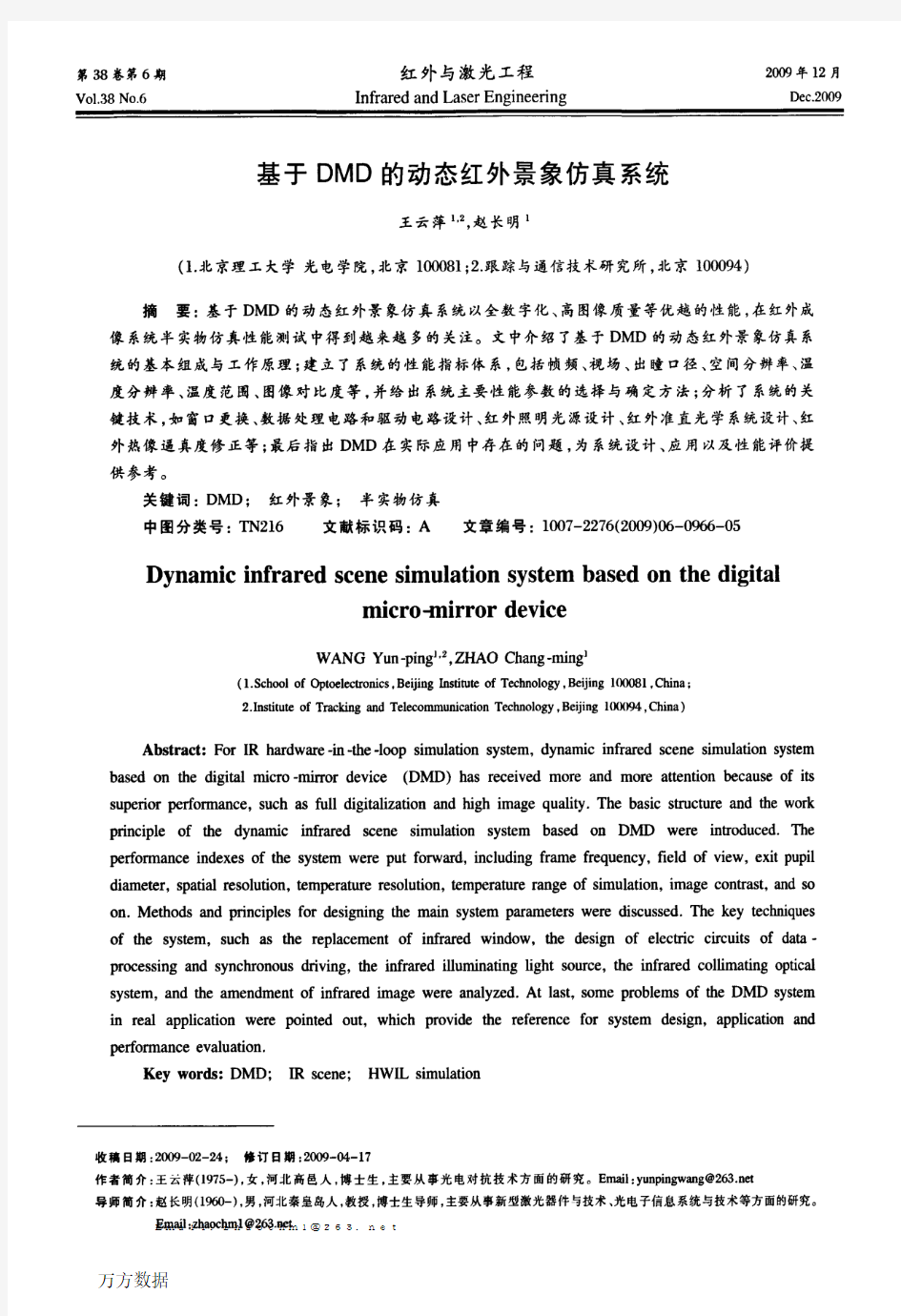
基于DMD的动态红外景象仿真系统由以下几部分组成:照明光源、DMD阵列、准直光学系统、计算机图像生成器CIG、DMD驱动电路等伯】,如图l所示。由计算机图像生成器产生红外图像数据,通过DLP数字光处理视频处理电路和DMD驱动电路输入DMD器件。用照明光源(黑体)均匀照射DMD表面,利用DMD反射调制入射辐射,产生红外热图像。生成的红外景象通过准直光学系统投射到被测系统的入瞳处,使红外景象与真实目标与背景在探测器上的像斑大小、辐射能量空间分布一致,以达到评价被测系统性能的目的。
图l基于DMD的动态红外景象仿真系统组成框图
Fig.1BlockdiagramofdynamicIRscenesimulation
systembasedonDMD
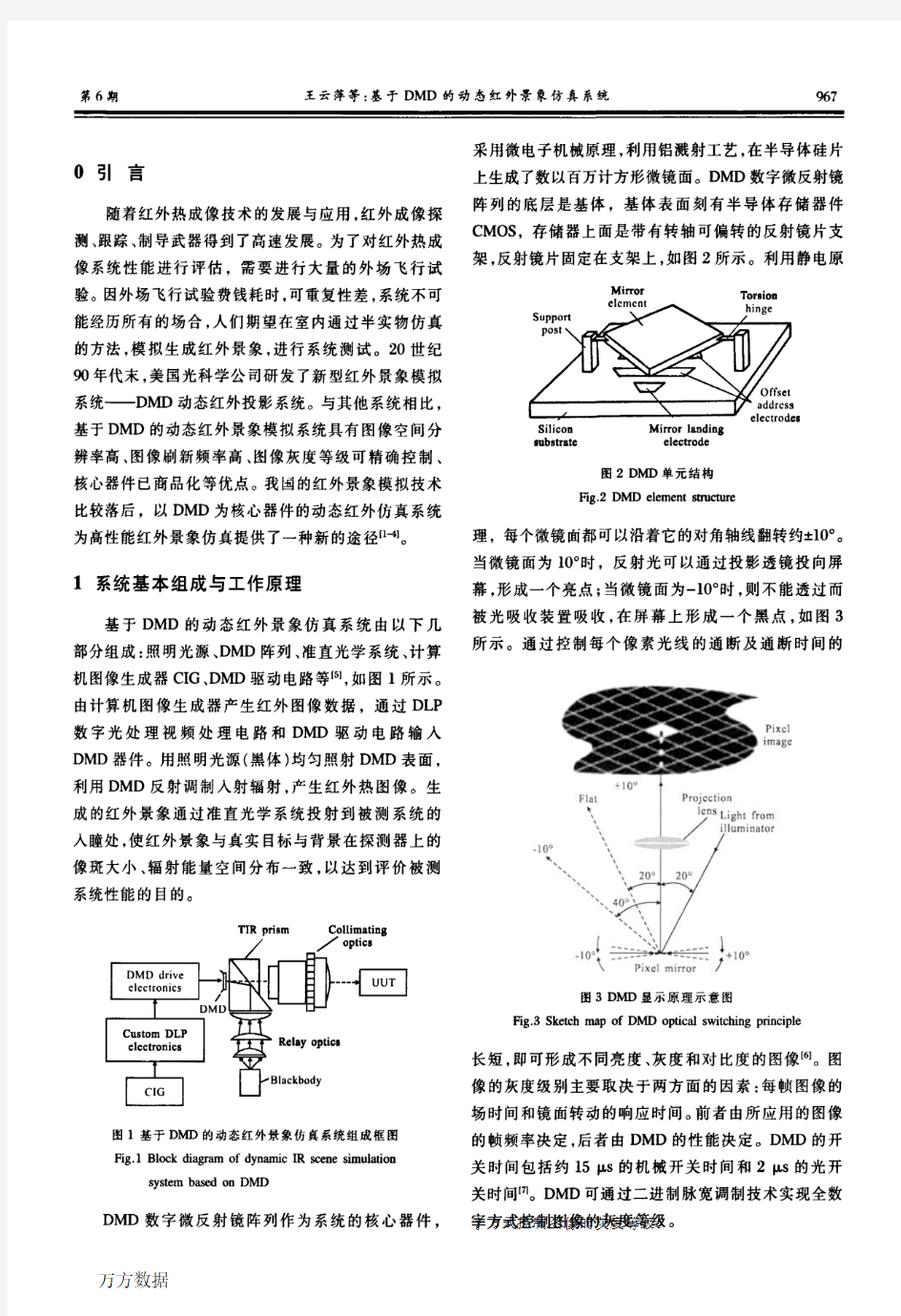
DMD数字微反射镜阵列作为系统的核心器件,采用微电子机械原理,利用铝溅射工艺,在半导体硅片上生成了数以百万计方形微镜面。DMD数字微反射镜阵列的底层是基体,基体表面刻有半导体存储器件CMOS,存储器上面是带有转轴可偏转的反射镜片支架,反射镜片固定在支架上,如图2所示。利用静电原
SiliconMirrorlanding
Inbstrateelectrode
图2DMD单元结构
Fig.2DMDelementstructllre
理,每个微镜面都可以沿着它的对角轴线翻转约±100。当微镜面为lOo时,反射光可以通过投影透镜投向屏幕,形成一个亮点;当微镜面为-10。时,则不能透过而被光吸收装置吸收,在屏幕上形成一个黑点,如图3所示。通过控制每个像素光线的通断及通断时间的
图3DMD显水原理不葸图
Fig.3Sketchmapof
DMDopticalswitchingprinciple
长短,即可形成不同亮度、灰度和对比度的图像№】。图像的灰度级别主要取决于两方面的因素:每帧图像的场时间和镜面转动的响应时间。前者由所应用的图像的帧频率决定,后者由DMD的性能决定。DMD的开关时间包括约15斗s的机械开关时间和2“s的光开关时间171。DMD可通过二进制脉宽调制技术实现全数
字方式控制图像的灰度等级。
万方数据
万方数据
万方数据
万方数据
三维人体动态计算机模拟及仿真系统 (一)LifeMOD生物力学数字仿真软件 1.简介 LifeMOD 生物力学数字仿真软件是在 MSC.ADAMS 基础上,进行二次开发,用以研究人体生物力学特征的数字仿真软件,是当今最先进、最完整的人体仿真软件。LifeMOD 生物力学数字仿真软件可用于建立任何生物系统的生物力学模型。这种仿真技术可使研究人员建立各种各样的人体生物力学模型,模拟和仿真人体的运动,并深入地了解人体动作背后的力学特性以及动作技能控制规律。 鉴于LifeMOD 生物力学数字仿真软件的强大功能,它成功地应用于生物力学、工程学、康复医学等多个领域。 2.厂商 美国BRG(Biomechanics Research Group)公司具有超过20年的与世界顶级研究机构和商业机构的成功合作历史,包括体育器材生产商、整形外科、人体损伤研究机构、高校和研究院所、政府机构、医疗器械生产商以及空间技术研究机构,在生物力学、工程学、康复医学等许多行业中有卓越的名誉。 3.型号 LifeMOD 2008.0.0 4.功能 LifeMOD 生物力学数字仿真软件的功能强大、先进而且普遍适用。 LifeMOD 生物力学数字仿真软件可用于建立任何生物系统的生物力学模型。这种仿真技术可使研究人员建立各种各样的人体生物力学模型;这些模型既能够再现现实的人体运动,也能够按照研究者的意愿预测非现实的人体运动;通过人体动作的模拟和仿真,计算出人体在运动过程中的运动学和动力学数据,从而使研究者能够深入地了解人体动作背后的力学特性以及动作技能控制规律。
在体育领域,利用LifeMOD的个性化建模和强大的计算能力,不但可以将运动员的比赛和训练情况进行再现并分析运动学、动力学特征,而且能够根据运动员各自的生理特征来进行不同情况的仿真,进行优化分析,进而达到优化运动员技术的目的,从而指导和帮助运动训练。 5.软件特性 LifeMOD 生物力学数字仿真软件是创建成熟、可信的人体模型的工具。它具有以下特性: ●快速生成人体模型。能在不到一分钟的时间里完成人体模型的创建。 ●完整的骨骼/皮肤/肌肉模型。具有骨骼、皮肤、肌肉的人体模型与受试 对象是成比例的。 ●可根据研究需要,建立不同精度的人体模型。(简单的是19环节18关 节,复杂的根据研究的精度要求完善) ●多个互相作用的模型共存。同一环境下,能够有6个模型共存,模型能 够与环境、器械以及彼此间相互作用完成动作。
4.机电系统动态性能的计算机仿真 4.1 概述 机电系统计算机仿真是目前对复杂机电系统进行分析的重要手段与方法。在进行机电系统分析综合与设计工作过程中,除了需要进行理论分析外,还要对系统的特性进行实验研究。系统性能指标与参数是否达到预期的要求?它的经济性能如何?这些都需要在系统设计中给出明确的结论。对于那些在实际调试过程中存在很大风险或实验费用昂贵的系统,一般不允许对设计好的系统直接进行实验,然而没有经过实验研究是不能将设计好的系统直接放到生产实际中去的,因此就必须对其进行模拟实验研究。当然在有些情况下可以构造一套物理模拟装置来进行实验,但这种方法十分费时而且费用又高,而在有的情况下物理模拟几乎是不可能的。近年来随着计算机的迅速发展,采用计算机对机电系统进行数学仿真的方法已被人们采纳。所谓机电系统计算机仿真就是以机电系统的数学模型为基础,借助计算机对机电系统的动静态过程进行实验研究。这里讲的机电系统计算机仿真是指借助数字计算机实现对机电系统的仿真分析。这种实验研究的特点是:将实际系统的运动规律用数学表达式加以描述,它通常是一组常微分方程或差分方程,然后利用计算机来求解这一数学模型,以达到对系统进行分析研究的目的。 对机电系统进行计算机仿真的基本过程包括:首先建立系统的数学模型,因为数学模型是系统仿真的基本依据,所以数学模型极为重要。然后根据系统的数学模型建立相应的仿真模型,一般需要通过一定的算法或数值积分方法对原系统的数学模型进行离散化处理,从而建立起相应的仿真模型,这是进行机电系统仿真分析的关键步骤;最后根据系统的仿真模型编制相应的仿真程序,在计算机上进行仿真实验研究并对仿真结果加以分析。 机电系统计算机仿真的应用与发展已经过了近40年的历程,进入20世纪80
三维人体动态计算机模拟及仿真系统 (一) LifeMOD生物力学数字仿真软件 1. 简介 LifeMOD 生物力学数字仿真软件是在 MSC.ADAMS 基础上,进行二次开发,用以研究人体生物力学特征的数字仿真软件,是当今最先进、最完整的人体仿真软件。LifeMOD 生物力学数字仿真软件可用于建立任何生物系统的生物力学模型。这种仿真技术可使研究人员建立各种各样的人体生物力学模型,模拟和仿真人体的运动,并深入地了解人体动作背后的力学特性以及动作技能控制规律。鉴于LifeMOD 生物力学数字仿真软件的强大功能,它成功地应用于生物力学、工程学、康复医学等多个领域。 2. 厂商 美国BRG(Biomechanics Research Group)公司具有超过20年的与世界顶级研究机构和商业机构的成功合作历史,包括体育器材生产商、整形外科、人体损伤研究机构、高校和研究院所、政府机构、医疗器械生产商以及空间技术研究机构,在生物力学、工程学、康复医学等许多行业中有卓越的名誉。 3. 型号 LifeMOD 2008.0.0 4. 功能 LifeMOD 生物力学数字仿真软件的功能强大、先进而且普遍适用。 LifeMOD 生物力学数字仿真软件可用于建立任何生物系统的生物力学模型。这种仿真技术可使研究人员建立各种各样的人体生物力学模型;这些模型既能够再现现实的人体运动,也能够按照研究者的意愿预测非现实的人体运动;通过人体动作的模拟和仿真,计算出人体在运动过程中的运动学和动力学数据,从而使研究者能够深入地了解人体动作背后的力学特性以及动作技能控制规律。 在体育领域,利用LifeMOD的个性化建模和强大的计算能力,不但可以将运动员的比赛和训练情况进行再现并分析运动学、动力学特征,而且能够根据运动员各自的生理特征来进行不同情况的仿真,进行优化分析,进而达到优化运动员技术的目的,从而指导和帮助运动训练。 5. 软件特性 LifeMOD 生物力学数字仿真软件是创建成熟、可信的人体模型的工具。它具有以下特性: ● 快速生成人体模型。能在不到一分钟的时间里完成人体模型的创建。● 完整的骨骼/皮肤/肌肉模型。具有骨骼、皮肤、肌肉的人体模型与受试 对象是成比例的。 ● 可根据研究需要,建立不同精度的人体模型。(简单的是19环节18关
动态系统建模仿真实验报告 实验二,实验四 姓名 学号
实验二直流电动机-负载建模及仿真实验 1实验内容 在运动控制系统中电机带动负载转动,电机-负载成为系统的被控对象。本实验项目要求根据电机工作原理及动力学方程,建立模型并仿真。 2实验目的 掌握直流电动机-负载的模型的建立方法; 3实验器材 (1)硬件:PC机。 (2)工具软件:操作系统:Windows系列;软件工具:MATLAB及simulink。 4实验原理 在很多应用场合中,直流电动机的输出轴直接与负载轴相连,转动部件固定在负载轴上,即为常见的电机直接驱动负载形式。如果不考虑传动轴在转动过程中的弹性形变,即把传动轴的刚度看作无穷大,就可以在系统设计过程中,将执行电机和负载视为一个整体对象,这样被控对象的模型就可以用如图2.1所示的 框图来表示。其中 U表示控制电压;a U,a L,a R分别表示电机的电枢电压,电 r 枢电感和电枢电阻; J为电机的转动惯量,L J为负载的转动惯量,包括由电机 m 驱动的转动体、轴承内圈、转动轴、轴套、速度测量元件、角度测量元件以及被测试件折合到电机轴上的转动惯量等; D、L D分别表示电机和负载的粘性阻尼 m 系数; k为电机的电磁力矩系数;e k为电机的反电势系数;mθ为电机-负载的转 m 角, θ 为电机-负载的角速度。 m 在这一实验中,认为电机与负载的转角是相同的,并考虑了电机及负载转动中产生的粘滞阻尼力矩,所以其电压方程、力矩方程变为如下形式
?????+=+--=+=-s s J J D D M s I k s k s E s s I T s I Ra s E s Ua m l m L m l m m e l )()()()()()())()(()()(θθ (2.1) 由方程组(2.1)可以得到相应的结构框图如图1所示。 图1直流电动机-负载数学模型结构框图 5实验要求: (1)建立从a u 到m θ 的传递函数模型,求其频率特性,并与项目1中的电机频率特性进行对比。 (2)分别取(Dm+D L )1=0.1(Dm+D L )和(Dm+D L )2=0.01(Dm+D L ),编制MATLAB 或simulink 程序,比较阻尼系数不同时电机-负载模型的频率特性。 (3)分别取J L1=0.1J L 和J L 2=10J L ,编制MATLAB 或simulink 程序,比较电机-负载模型的频率特性。 实验所需具体参数如下表。
1实验目的 (1)了解位置伺服系统的组成及工作原理; (2)了解不同控制策略对系统性能的影响。 2实验设备 (1)硬件:PC 机。 (2)工具软件:操作系统:Windows 7;软件工具:MATLAB R2014a 及simulink 。 3工作原理及实验要求 3.1实验原理 图3.1是一个以直流电机为驱动元件的位置伺服系统的方块图,Gc (s )为控制器,u f 为与作用于转动轴上的摩擦力矩相对应的电压值。 对于位置伺服控制系统,控制器的输出并不是直接驱动电机,而是经过D/A 转换及功率放大后驱动电机带动负载运动。控制的目标,是使由位置传感器及测量装置给出位置反馈信号跟踪指令信号。实际的控制对象中包含D/A 、功率放大器、电机、负载、位置传感器及测量装置等环节,在本实验项目中,将各环节的模型适当简化,得到广义被控对象为如下形式: Bs Js G P += 2 1 (1.1) 其中J 为等效转动惯量,B 为等效阻尼系数。 图3.1位置伺服系统方块图 3.2实验要求 (1)采用PID 控制器对系统进行仿真,求出负载转角的响应曲线。要求考虑摩 擦力矩、控制器输出饱和等非线性因素的影响。 (2)采用模糊控制算法对系统进行仿真,求出求出负载转角的响应曲线,并与 PID 控制的响应曲线进行比较。仿真时要求考虑摩擦力矩、控制器输出饱
和等非线性因素的影响。 4实验内容及步骤 4.1PD 控制位置伺服系统仿真 (1)定义参数: 系统仿真图为图4.1,信号发生器选择幅值为5频率1的正弦信号,在本次实验中Bs Js G P += 2 1 ,参数J 取0.05,参数B 取0.5。摩擦力矩? -=θJ u u f ,u 为控制输出,J 为等效转动惯量,? θ转速。非线性饱和器上下限非别为10~-10。 图4.1 PD 控制位置伺服系统 (2)PD 参数整定 本次仿真采用试凑法确定PID 控制器参数,试凑法就是根据控制器各 参数对系统性能的影响程度,边观察系统的运行,边修改参数,直到满意为止。 一般情况下,增大比例系数KP 会加快系统的响应速度,有利于减少静差。但过大的比例系数会使系统有较大的超调,并产生振荡使稳定性变差。减小积分系数KI 将减少积分作用,有利于减少超调使系统稳定,但系统消除静差的速度慢。增加微分系数KD 有利于加快系统的响应,是超调减少,稳定性增加,但对干扰的抑制能力会减弱。在试凑时,一般可根据以上参数
一曲柄滑块机构运动学仿真 1、设计任务描述 通过分析求解曲柄滑块机构动力学方程,编写matlab程序并建立Simulink 模型,由已知的连杆长度和曲柄输入角速度或角加速度求解滑块位移与时间的关系,滑块速度和时间的关系,连杆转角和时间的关系以及滑块位移和滑块速度与加速度之间的关系,从而实现运动学仿真目的。 2、系统结构简图与矢量模型 下图所示是只有一个自由度的曲柄滑块机构,连杆与长度已知。 图2-1 曲柄滑块机构简图 设每一连杆(包括固定杆件)均由一位移矢量表示,下图给出了该机构各个杆件之间的矢量关系 图2-2 曲柄滑块机构的矢量环
3.匀角速度输入时系统仿真 3.1 系统动力学方程 系统为匀角速度输入的时候,其输入为输出为;。 (1) 曲柄滑块机构闭环位移矢量方程为: (2)曲柄滑块机构的位置方程 (3)曲柄滑块机构的运动学方程 通过对位置方程进行求导,可得 由于系统的输出是与,为了便于建立A*x=B形式的矩阵,使x=[], 将运动学方程两边进行整理,得到 将上述方程的v1与w3提取出来,即可建立运动学方程的矩阵形式 3.2 M函数编写与Simulink仿真模型建立 3.2.1 滑块速度与时间的变化情况以及滑块位移与时间的变化情况 仿真的基本思路:已知输入w2与,由运动学方程求出w3和v1,再通过积分,即可求出与r1。 (1)编写Matlab函数求解运动学方程 将该机构的运动学方程的矩阵形式用M函数compv(u)来表示。 设r2=15mm,r3=55mm,r1(0)=70mm,。 其中各个零时刻的初始值可以在Simulink模型的积分器初始值里设置
M函数如下: function[x]=compv(u) %u(1)=w2 %u(2)=sita2 %u(3)=sita3 r2=15; r3=55; a=[r3*sin(u(3)) 1;-r3*cos(u(3)) 0]; b=[-r2*u(1)*sin(u(2));r2*u(1)*cos(u(2))]; x=inv(a)*b; (2)建立Simulink模型 M函数创建完毕后,根据之前的运动学方程建立Simulink模型,如下图: 图3-1 Simulink模型 同时不要忘记设置r1初始值70,如下图: 图3-2 r1初始值设置
变量叶片泵的Solidwords三维建模及动态仿真 摘要 本次毕业设计课题为变量叶片泵的三维建模及动态仿真,主要是根据变量泵各实际零件尺寸及形状,通过测绘及观察配合关系,分析其工作原理后,运用Solidwords三维建模软件对其进行实体建模。在整个设计过程中,需充分理解变量泵的运动原理,了解其排量和流量的计算形式。清楚变量泵的特点,对各零件的尺寸要精确测量,避免装配时尺寸不当。首先,需要对变量泵实体进行拆卸,在拆卸过程中需记住各配合关系;其次,对拆下的零件进行测量,记下其实际尺寸,并运用三维建模软件进行绘制;然后,将各个零件按照配合关系装配起来,形成装配体;最后,做出实体动画,仿真分析其工作原理,并对其进行说明。单作用变量泵的特点主要是它可以通过改变转子和定子的偏心距来调节泵的流量,使液压系统在工作进给时能量利用合理,效率高,油的温升小。 Abstract The topics for graduate design variables leaves the pump dynamic three-dimensional modeling and simulation, Variables are mainly based on the actual parts of the pump size and shape, through the mapping and observation with, Analysis of its working principles, Solidwords use of its three-dimensional modeling software modeling. Throughout the design process, the need for full understanding of the movement principle of variable pump, aware of their displacement and flow of the calculation. Variable pump clearly the characteristics of the various components to accurately measure the size, to avoid improper assembly at the size. First, the need for variable pump entities to be demolished, the demolition process in line with the need to keep in mind; Secondly, removing the parts were measured, recorded its actual size and use of three-dimensional modeling software rendering; Then, with relations between various parts in accordance with the assembly, formed assembly; Finally, to entities animation, simulation analysis of its working principles, and its description. Single variable pump is the main feature of it by changing the stator and rotor of the eccentricity to regulate the flow of pumps, hydraulic system at work when the feed energy use reasonable, high efficiency, small temperature rise of oil.
实验一 MATLAB 基本操作 一、实验目的: ①通过上机实验操作,使学生熟悉 MA TLAB 实验环境,练习 MA TLAB 命令、m 文件,进行矩阵运算、图形绘制、数据处理。 ②通过上机操作, 使得学生掌握 Matlab 变量的定义和特殊变量的含义,理解矩阵运算和数组运算的定义和规则。 ③通过上机操作,使得学生掌握数据和函数的可视化,以及二维曲线、三维曲线、三维曲面的各种绘图指令。 二、实验原理与说明 Matlab 是 Matrix 和 Laboratory 两词的缩写,是美国 Mathworks 公司推出的用于科学计算和图形处理的可编程软件,经历了基于 DOS 版和 Windows 版两个发展阶段。 三、实验设备与仪器: PC 电脑, Matlab7.0仿真软件 四、实验内容、方法与步骤: 数组运算与矩阵运算 数组“除、乘方、转置”运算符前的“ . ”决不能省略,否则将按矩阵运算规则进行运算; 执行数组与数组之间的运算时, 参与运算的数组必须同维,运算所得的结果也与参与运算的数组同维。 A=[ 1 2 3; 4 5 6; 7 8 9]; B=[-1 -2 -3; -4 -5 -6; -7 -8 -9];
X=A.*B Y=A*B plot 用于二维曲线绘图,若格式为 plot (X , Y , ’ s ’ ,其中 X 为列向量, Y 是与 X 等行的矩阵时,以 X 为横坐标,按 Y 的列数绘制多条曲线; 若 X 为矩阵, Y 是向量时,以 Y 为纵坐标按 X 的列数(或行数绘 制多条曲线。 参考程序如下: t=(0:pi/100:pi' y1=sin(t*[-1 1]; y2=sin(t.*sin(9*t; plot(t,y1, 'r:', t, y2, 'b-.' axis([0 pi, -1, 1] title('Drawn byDong-yuan GE' 程序运行界面如下:
过程控制工程课程设计 课题名称空调温度控制系统的建模与仿真 学院 专业 班级 学生姓名 学号 时间 6 月13日至6月19日 指导教师(签字) 2011 年 6 月19 日
目录 第一章设计题目及要求 (1) 1.1设计背景 (1) 1.2设计任务 (1) 1.3主要参数 (2) 1.3.1恒温室: (2) 1.3.2热水加热器ⅠSR、ⅡSR: (2) 1.3.3电动调节阀: (2) 1.3.4温度测量环节: (2) 1.3.5调节器: (2) 第二章空调温度控制系统的数学模型 (3) 2.1恒温室的微分方程 (3) 2.1.1微分方程的列写 (3) 2.1.2 增量微分方程式的列写 (5) 2.2 热水加热器对象的微分方程 (5) 2.3敏感元件及变送器的特性 (6) 2.3.1敏感元件的微分方程 (6) 2.3.2变送器的特性 (7) 2.3.3敏感元件及变送器特性 (7) 2.4 执行器的特性 (8) 第三章控制系统方案设计 (9) 3.1系统分析 (9) 3.2单回路控制系统设计 (9) 3.2.1单回路控制系统原理 (9) 3.2.2单回路系统框图 (10) 3.3串级控制系统的设计 (11) 3.3.1串级控制系统原理 (11) 3.3.2串级控制系统框图 (12) 第四章单回路系统调节器参数整定 (12) 5.1.1、PI控制仿真 (16) 5.1.2 PID控制仿真 (17) 5.1.3、PI与PID控制方式比较 (17) 第六章设计小结 (18) 参考文献 (18)
第一章设计题目及要求 1.1设计背景 设计背景为一个集中式空调系统的冬季温度控制环节,简化系统图如附图所示。 系统由空调房间、送风道、送风机、加热设备及调节阀门等组成。为了节约能量,利用一部分室内循环风与室外新风混合,二者的比例由空调工艺决定,并假定在整个冬季保持不变。用两个蒸汽盘管加热器1SR、2SR对混合后的空气进行加热,加热后的空气通过送风机送入空调房间内。本设计中假设送风量保持不变。 1.2设计任务 设计主要任务是根据所选定的控制方案,建立起控制系统的数学模型,然后
动态系统建模仿真-实验报告
————————————————————————————————作者: ————————————————————————————————日期:
1实验目的 (1)了解位置伺服系统的组成及工作原理; (2)了解不同控制策略对系统性能的影响。 2实验设备 (1)硬件:PC 机。 (2)工具软件:操作系统:W indows 7;软件工具:MATL AB R2014a 及s imu link 。 3工作原理及实验要求 3.1实验原理 图3.1是一个以直流电机为驱动元件的位置伺服系统的方块图,Gc (s)为控制器,u f 为与作用于转动轴上的摩擦力矩相对应的电压值。 对于位置伺服控制系统,控制器的输出并不是直接驱动电机,而是经过D/A 转换及功率放大后驱动电机带动负载运动。控制的目标,是使由位置传感器及测量装置给出位置反馈信号跟踪指令信号。实际的控制对象中包含D/A 、功率放大器、电机、负载、位置传感器及测量装置等环节,在本实验项目中,将各环节的模型适当简化,得到广义被控对象为如下形式: Bs Js G P += 21 (1.1) 其中J 为等效转动惯量,B 为等效阻尼系数。 1 Js +Bs 2 Gc(s) r y e u f - u 电机-负载模型 图3.1位置伺服系统方块图 3.2实验要求 (1)采用PID 控制器对系统进行仿真,求出负载转角的响应曲线。要求考虑摩擦 力矩、控制器输出饱和等非线性因素的影响。
(2)采用模糊控制算法对系统进行仿真,求出求出负载转角的响应曲线,并与 PID 控制的响应曲线进行比较。仿真时要求考虑摩擦力矩、控制器输出饱和等非线性因素的影响。 4实验内容及步骤 4.1PD 控制位置伺服系统仿真 (1)定义参数: 系统仿真图为图4.1,信号发生器选择幅值为5频率1的正弦信号,在本次实验中Bs Js G P += 2 1 ,参数J 取0.05,参数B 取0.5。摩擦力 矩? -=θJ u u f ,u 为控制输出,J 为等效转动惯量,? θ转速。非线性饱和器上下限非别为10~-10。 图4.1 PD 控制位置伺服系统 (2)PD 参数整定 本次仿真采用试凑法确定PID 控制器参数,试凑法就是根据控制器 各参数对系统性能的影响程度,边观察系统的运行,边修改参数,直到满意为止。 一般情况下,增大比例系数KP 会加快系统的响应速度,有利于减少静差。但过大的比例系数会使系统有较大的超调,并产生振荡使稳定性变差。减小积分系数KI将减少积分作用,有利于减少超调使系统稳定,但系
广东工业大学华立学院 本科毕业设计(论文) 玩具四驱车三维建模及动画仿真 系部机电工程学部 专业机械设计制造及其自动化 班级 09机械4班 学号 12010904033 学生姓名邹明珍 指导教师周艳琼 2013年06月
摘要 本次设计是基于solidworks 2010版本来进行四驱车的三维建模和工作状态的动画仿真的,其主要目的是为了开拓广大的玩具市场和满足爱车一族的珍藏喜好,。 本毕业设计主要内容是按真四驱车缩小对四驱车进行仿真设计造型,因考虑成本且实现运动和仿真,本设计简化了其结构而设计的四轮驱动模型车。本设计的材料选用塑料,以便减轻车子的负载和降低成本。把原本的动力源发动机改为电机驱动,通过简单的齿轮传动,改变运动方向和速度,使得轮轴的旋转,从而带动车轮的旋转,让车子运动起来,以达对真四驱车的运动仿真。最后一个部份则是对本次设计中所遇到的问题和解决方案进行的总结。 关键词:solidworks,三维建模,仿真,四驱车
Abstract This design of which main purpose is to develop the toy market and satisfy the collection of motorists preferences, is based on solidworks 2010 version, feeder of the bottled embryo, 3d modeling and stimulation of the status of the animation. The main content of the graduation design is to design simulation modelling according to narrowing the raider buggies. Because of considering cost and realizing the simulation of motions, the design simplifies the structure and designs the four-wheel drive model car. The material selection of this design is plastic , so as to reduce the load and the cost of the car. The motor drive is instead of the source power engine. Through a simple gear transmission, changing the direction and speed of the car, making the rotation of the shaft, so that it can drive the rotation of the wheel, let the car move, and achieve the movement simulation of the true buggies .The last part is summarizing about the problems encountered and the solutions in this design. Keywords: solidworks , 3d modeling , simulation, four-wheel drive
矿井三维通风动态仿真模拟系统 从当前我国的煤矿安全事故统计发现,但凡能造成重特大事故发生的,一般都与通风系统有关,或者是通风系统不合理,或者是通风系统本身就没有完整地形成,导致包括瓦斯爆炸、煤尘爆炸等重特大事故。另外,由于矿井建设和生产在不断的变化如巷道在不断地开拓延伸,工作面生产在不断地推进, 某一时间 段的合理的通风系统,但过了一段时间就有可能不合理,如:有些巷道或工作区域的风速过大,有些巷道风量很小,造成瓦斯等有害气体积聚,给矿井安全留下严重的隐患,因此,整个矿井的通风系统也是一个动态的变化过程。 构建合理的矿井通风系统,就是利用通风动力,以最经济的方式,向井下各用风地点提供足量的新鲜空气,提供适宜的温度、湿度,保持良好的气候条件,以保证井下作业人员的生命安全和改善劳动环境的需要,采取符合实际的矿井通风方式、矿井通风方法和矿井通风网络;并且要求在发生灾害时,能及时而有效地控制风向及风量,并配合其它措施,将事故控制在一定范围内,防止灾害的进一步扩大。因此,一套合理的通风系统对于保证煤矿安全生产极为重要。 为实现以上目的,必须借助于现代化的信息管理技术,以计算机作为辅助手段,来对矿井通风系统进行管理。使用计算机图形技术建立矿井真三维通风网络模型,对巷道的断面、风阻以及通风构筑物等参数进行赋值,实现通风系统的数字化和三维可视化,然后通过成熟的算法对通风网络数据进行处理、解算,对通风过程进行动态模拟,从而为矿山管理人员和技术人员提供必要的数据支持,以辅助通风和生产决策。 矿井三维通风动态仿真模拟系统是当前通风领域世界领先的软件系统。通过三维建模,系统将复杂的 通风参数和通风过程以三维动态图形的方式简单、直观的展现出来,通风技术人员可从任意角度观察和调整通风系统,实现巷道风量分配的实时解算和分析,帮助提高矿井通风决策人员的科学决策水平。该系统建成后可作为矿山通风辅助决策分析平台,可广泛应用于:矿井通风系统管理与优化,通风系统薄弱环节三维可视化展现与预警(如:风速过大、微风、污风循环>,通风系统调整方案制定及预先仿真模拟<如:预测巷道贯通、延伸、密闭、工作面搬迁或者风机叶片角调整后通风系统通风能力和稳定性),应急预案制定及避灾线路动态分析,风机工况点分析,自然风压分析,井下岩温、风温及火灾条件下非稳态通风系统模拟分析,反风演习模拟与分析、通风系统经济性分析以及以三维通风仿真为基础的通风管理决策支持等领域,帮助煤矿实现实时、动态、合理和科学的通风管理,为实现矿井通风系统实时联网管理打下基础。 某矿地表工业广场鸟瞰图:
摘要:经过半个多世纪的发展,仿真技术已经成为对人类社会发展进步具有重要影响的一门综合性学科。本文对建模与仿真技术发展趋势作了比较全面的分析。仿真建模方法更加丰富,更加需要仿真建模具有互操作性和可重用性,仿真建模与可信度评估成为仿真建模发展的重要支柱;仿真体系结构逐渐形成标准,仿真系统层次化、网络化已成为现实,仿真网格将是下一个重要发展方向;仿真应用领域更加丰富,向复杂系统领域发展,并将更将贴近人们的生活。 经过半个多世纪的发展,仿真技术已经成为人类社会发展进步具有重要影响的一门综合性学科。仿真技术的领域不在局限于某些尖端学科技术研究领域,而成为一项被众多学科领域广泛采用的通用型技术。半个世纪以来,仿真救赎一方面始终是建模技术、计算技术和其他信息技术最先的应用者,另一方面是对计算技术和网络技术等的发展不断提出新的挑战。 在我国建模与仿真方法是随着应用需求的发展不断的进步,近十年来仿真技术发展是沿着以应用需求牵引建模与仿真系统开发、以建模与仿真系统带动建模与仿真技术突破、以建模与仿真技术促进建模与仿真系统发展、将建模与仿真系统又服务于应用良性循环的道路向前发展。 仿真技术研究人员一方面不断地扩展仿真应用领域,另一方面,其他领域研究的丰富成果与不断促使仿真技术人员从新的角度、新的高度、新的广度认识建模与仿真。在近半个世纪的积累和近十年的快速发展的基础上,建模与仿真技术已经成为以相似原理、模型理论、系统技术、信息技术以及仿真应用领域的有关专业技术为基础,以计算机系统、与应用相关的物理效应设备及仿真器为工具,利用模型对已有的或设想的系统进行研究、分析、实验与运行的一门综合性技术。 仿真建模的发展 仿真是基于建模的活动,模型建立、实现、验证、应用是仿真过程不变的主题。随着时代的发展,仿真模型包含的内容大大扩展,建模方法日益多样,模型交互性和重要性变的越来越重要,模型的校核与验证的成功为仿真中必要步骤。 -----------------------------------系统仿真学报杨明张冰王子才哈尔滨工业大学,哈尔滨150001 基本概念 系统:按照某些规律结合起来,互相作用、互相依存的所有实体的集合或总和。模型:从特定应用角度,表达对象系统特征与特性的形式。仿真:用物理模型或数学模型代替实际系统进行实验和研究。 对象系统:仿真、分析与研究的对象。仿真系统:实施仿真的系统。 仿真分类:
汽车涂装生产线的三维动态仿真 作者:戴曼文章来源:机械工业第四设计研究院点击数:365 更新时间:2009-7-28 通过可视化仿真可以实现涂装车间的布局设计和生产过程的动态仿真,而且可以依据仿真结果确定生产线的技术参数以决策生产的意义。 近年来,随着经济全球化、区域经济一体化的加强,汽车工业正面临着越来越激烈的挑战,经历着重大的转折。汽车行业的高投入、高产出特点要求企业必须在尽可能短的时间内,越过规模经济的门槛。只有这样,才能保证整车和零部件企业以及相关产业进行经济的生产,才能保证开发能力的投入,才能在国际市场上抢先占有采购优先权,从而降低成本,进一步扩大实力。因此,扩大生产、提高生产效率成为汽车行业的主要关注点。 作为汽车生产工艺中的重要环节,涂装质量的好坏直接影响人们对汽车质量的评价,涂装生产线也是整车厂中投资最大、运行费用最高、工艺最复杂、涉及管理环节及专业最多的环节。涂装生产线的规划设计合理性和运行效率直接影响产品质量及生产成本。 传统的涂装生产线规划设计方法是采用平面设计和数学计算相结合的方式,生产线的布局采用对实体简化的方式进行布置,生产线运行的情况则通过计算进行推演,同时根据经验进行优化,并最终指导实际的布局设计。用数学优化模型描述的布局问题尽管已做了简化,但与实际相差甚远,在算法求解的有限时间内得不到精确解,很难根据复杂的实际变化进行及时修改,更难以直观表现生产线实际运行的情况。 现代生产中企业自动化程度提高,生产系统日渐复杂,生产速度日渐加快,因此在设计系统的时候需要面临很多问题:如何验证系统的设计是否合理,如何确定缓存区的数量和瓶颈区域,如何验证生产大纲以及物流设备的控制逻辑等。这些问题采用传统的规划设计方法难以解决,在生产线规划设计上,要找到技术性与经济性的最佳结合点,就需要借助于一种新的技术——系统仿真技术来解决。
物流系统三维虚拟仿真 一.引言 当前,仿真技术已经成为分析、研究各种复杂系统的重要工具,它广泛用于工程领域和非工程领域。仿真可定义为:在全部时间内,通过对系统的动态模型性能的观测来求解问题的技术。物流系统是企业生产的一个重要组成部分,物流合理化是提高企业生产率最重要的方法之一。因此对物流系统的设计和仿真的研究,也日益受到人们的重视。本文主要介绍了物流系统仿真的核心技术和计算机图形技术在物流仿真中的应用及国外三维物流仿真软件。 二.物流系统仿真的核心技术 物流系统的仿真是典型的离散事件系统仿真,其核心是时钟推进和事件调度的机制。离散事件系统是指系统状态在某些随机时间点上发生离散变化的系统。这种引起状态变化的行为称为"事件",因而这类系统是由事件驱动的;而且,"事件"往往发生在随机时间点上,亦称为随机事件,因而离散事件系统一般都具有随机特性;系统的状态变量往往是离散变化的。 1.仿真时钟 仿真钟用于表示仿真时间的变化。在离散事件系统仿真中,由于系统状态变化是不连续的,在相邻两个事件发生之前,系统状态不发生变化,因而仿真钟可以跨越这些"不活动"周期。从一个事件发生时刻,推进到下一个事件发生时刻。 由于仿真实质上是对系统状态在一定时间序列的动态描述。因此,仿真钟一般是仿真的主要自变量。仿真钟推进方法有三大类:事件调度法、固定增量推进法和主导时钟推进法。 应指出,仿真钟所显示的是系统仿真所花费的时间,而不是计算机运行仿真模型的时间。因此,仿真时间与真实时间成比例关系。象物流系统这样复杂的机电系统,仿真时间可比真实时间短的多。真实系统实际运行若干天,若干月,用计算机仿真也只需要几分钟。 2.事件调度法 事件调度法是面向事件的方法,是通过定义事件,并按时间顺序处理所发生的一系列事件。记录每一事件发生时引起的系统状态的变化来完成系统的整个动态过程的仿真。由于事件都是预定的,状态变化发生在明确的预定的时刻,所以这种方法适合于活动持续时间比较确定的系统。 事件调度法中仿真钟是按下一时间步长法来推进的。通过建立事件表,将预定的事件按时间发生的先后顺序放入事件表中。仿真钟始终推进到最早发生的时间时刻。然后处理该事件发生时的系统状态的变化,进行用户所需要的统计计算。这样,仿真钟不断从一个事件发生时间推进到下一个最早发生的事件时间,指导仿真结束。 3.随机数和随机变量的产生
4.机电系统动态性能的计算机仿真4.1 概述 机电系统计算机仿真是目前对复杂机电系统进行分析的重要手段与方法。在进行机电系统分析综合与设计工作过程中,除了需要进行理论分析外,还要对系统的特性进行实验研究。系统性能指标与参数是否达到预期的要求?它的经济性能如何?这些都需要在系统设计中给出明确的结论。对于那些在实际调试过程中存在很大风险或实验费用昂贵的系统,一般不允许对设计好的系统直接进行实验,然而没有经过实验研究是不能将设计好的系统直接放到生产实际中去的,因此就必须对其进行模拟实验研究。当然在有些情况下可以构造一套物理模拟装置来进行实验,但这种方法十分费时而且费用又高,而在有的情况下物理模拟几乎是不可能的。近年来随着计算机的迅速发展,采用计算机对机电系统进行数学仿真的方法已被人们采纳。所谓机电系统计算机仿真就是以机电系统的数学模型为基础,借助计算机对机电系统的动静态过程进行实验研究。这里讲的机电系统计算机仿真是指借助数字计算机实现对机电系统的仿真分析。这种实验研究的特点是:将实际系统的运动规律用数学表达式加以描述,它通常是一组常微分方程或差分方程,然后利用计算机来求解这一数学模型,以达到对系统进行分析研究的目的。 对机电系统进行计算机仿真的基本过程包括:首先建立系统的数学模型,因为数学模型是系统仿真的基本依据,所以数学模型极为重要。然后根据系统的数学模型建立相应的仿真模型,一般需要通过一定的算法或数值积分方法对原系统的数学模型进行离散化处理,从而建立起相应的仿真模型,这是进行机电系统仿真分析的关键步骤;最后根据系统的仿真模型编制相应的仿真程序,在计算机上进行仿真实验研究并对仿真结果加以分析。 机电系统计算机仿真的应用与发展已经过了近40年的历程,进入20世纪80年代以来,随着微型计算机技术以及软件技术的飞速发展与广泛应用,使得机电系统计算机仿真获得了实质性的发展,并使其走进广大的机电系统生产、设计、研究的第一线。目前在该领域应用最为广泛的软件包就是美国Mathworks公司开发的MATLAB语言软件。虽然它最初并非是为机电系统仿真与设计开发的,但是它的强大的矩阵运算功能与图形处理及绘制能力,以及在MATLAB平台上开发出来的各种工具箱,和面向结构图的SIMULINK 系统分析环境,为机电系统计算机仿真提供了强有力的软件工具,从而为机电系统计算机仿真与辅助设计开辟新的方法与途径提供了充分的条件。 考虑到部分读者不具备MATLAB基础知识,因此,在本书的附录一中对MATLAB
三维可视化与虚拟仿真 姓名:任伟杰 班级:测绘111班 学号:201116059115 任课老师:陈杰 时间:2014-06-13
内容摘要 三维动画是指使用电脑软件制作出的立体虚拟影像,又称3D动画,是近年来随着计算机技术的迅猛发展而产生的一项新兴技术。在3D技术日趋成熟的今天,3D动画已广泛应用于日常生活中的各行各业,如建筑,室内设计,影视动画,游戏动画等。而因应这一技术而诞生的一款功能强大的3D制作软件,它就是3Ds max,随着该软件版本的不断更新升级,在软件内部算法和功能上与低版本比较有了明显的提高,使它成为了一个巨大的三维动画创作平台。 由于3DsMAX的出现,这几年做三维和学三维的人日益增多,三维动画的制作已不再是大电影厂和专业影视制作公司的垄断的专利,三维平台的趋势已由高端过渡到低端。本文将通过对3D动画短片的制作过程的详细的介绍,其中主要介绍在3Dsmax中街道动画的制作,从而了解基本的动画制作知识,掌握运用3ds max进行动画创作的技巧。
目录 一对于三维动画设计的认知 (4) (一)什么是三维动画 (4) (二)三维动画发展史 (4) (三)使3D Max 制作三维动画的优势 (5) 二三维动画的具体制作方法 (7) (一)前期准备 (7) (二)片段的制作 (8) (三)后期制作 (10) (四)三维动画短片实例制作分析 (10) 三三维动画的发展前景 (17)
四总结 (18) 五致谢 (17) 一对于三维动画设计的认知 (一)什么是三维动画 三维动画是指通过使用电脑软件制作出的立体虚拟影像,又称之为3D动画,是近年来随着计算机软硬件技术的发展而产生的一项新技术。它是摄影艺术、布景设计,及舞台灯光的合理布置等等的各种艺术与技术的集合体。与此同时三维动画的设计制作需要更多的艺术功底和创造力。一个好的三维动画,它除了要求制作者要有较好的空间感与艺术感外,还有就是必须能够很好的运用各种三维动画的制作软件。因此三维动画的设计与制作是一个涉及范围很广的技术,也可以说它就是一件艺术和技术紧密相结合的工作。所以在以前就只有专业的三维动画制作者才能够制作的出来。 (二)三维动画发展史 综观三维动画的发展历程,从1995年的初始阶段到2004年开始的全盛时期三维平台的趋势由高端过渡到低端,不再需要几十万的工作站,一般家庭电脑就可以做出专业的三维作品,三维动画制作的收费也日趋合理,想当年20000块/秒的天价(广告级标版)到现在500元/秒都有人做,三维建筑、室内效果图也下降了很多,想靠做三维发大财已成为虚拟的幻境。国内电影业不景气,外国大片
实验一MATLAB基本操作 一、实验目的: ①通过上机实验操作,使学生熟悉MATLAB实验环境,练习MATLAB命令、m文件,进行矩阵运算、图形绘制、数据处理。 ②通过上机操作,使得学生掌握Matlab变量的定义和特殊变量的含义,理解矩阵运算和数组运算的定义和规则。 ③通过上机操作,使得学生掌握数据和函数的可视化,以及二维曲线、三维曲线、三维曲面的各种绘图指令。 For personal use only in study and research; not for commercial use 二、实验原理与说明 Matlab是Matrix 和Laboratory两词的缩写,是美国Mathworks公司推出的用于科学计算和图形处理的可编程软件,经历了基于DOS版和Windows版两个发展阶段。 三、实验设备与仪器: PC电脑,Matlab7.0仿真软件 四、实验内容、方法与步骤: 数组运算与矩阵运算 数组“除、乘方、转置”运算符前的“.”决不能省略,否则将按矩阵运算规则进行运算;执行数组与数组之间的运算时,参与运算的数组必须同维,运算所得的结果也与参与运算的数组同维。 A=[ 1 2 3; 4 5 6; 7 8 9]; B=[-1 -2 -3;-4 -5 -6;-7 -8 -9]; X=A.*B
plot用于二维曲线绘图,若格式为 plot(X,Y,’s’),其中X为列向量,Y是与X等行的矩阵时,以X 为横坐标,按Y的列数绘制多条曲线; 若X为矩阵,Y是向量时,以Y为纵坐标按X的列数(或行数)绘制多条曲线。 参考程序如下: t=(0:pi/100:pi)' y1=sin(t)*[-1 1]; y2=sin(t).*sin(9*t); plot(t,y1, 'r:', t, y2, 'b-.') axis([0 pi, -1, 1]) title('Drawn by Dong-yuan GE') 程序运行界面如下: plot3用于三维曲线绘制,其使用格式与plot十分相似。 参考程序如下: t=0:0.02:2*pi;