MPU6050从战舰开发板移植到miniV3板的步骤
- 格式:docx
- 大小:14.66 KB
- 文档页数:2
MPU6050基础MPU-6050MPU-6000为全球⾸例整合性6轴运动处理组件,相较于多组件⽅案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了⼤量的包装空间。
MPU-6000整合了3轴陀螺仪、3轴加速器,并含可藉由第⼆个I2C端⼝连接其他⼚牌之加速器、磁⼒传感器、或其他传感器的数位运动处理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端⼝以单⼀数据流的形式,向应⽤端输出完整的9轴融合演算技术InvenSense的运动处理资料库,可处理运动感测的复杂数据,降低了运动处理运算对操作系统的负荷,并为应⽤开发提供架构化的API。
MPU-6000的⾓速度全格感测范围为±250、±500、±1000与±2000°/sec (dps),可准确追緃快速与慢速动作,并且,⽤户可程式控制的加速器全格感测范围为±2g、±4g±8g与±16g。
产品传输可透过最⾼⾄400kHz 的I2C或最⾼达20MHz的SPI。
MPU-6000可在不同电压下⼯作,VDD供电电压介为2.5V±5%、3.0V±5%或3.3V±5%,逻辑接⼝VVDIO供电为1.8V± 5%。
MPU-6000的包装尺⼨4x4x0.9mm(QFN),在业界是⾰命性的尺⼨。
其他的特征包含内建的温度感测器、包含在运作环境中仅有±1%变动的振荡器。
应⽤运动感测游戏现实增强电⼦稳像(EIS: Electronic Image Stabilization)光学稳像(OIS: Optical Image Stabilization)⾏⼈导航器“零触控”⼿势⽤户接⼝姿势快捷⽅式认证市场智能型⼿机平板装置设备⼿持型游戏产品游戏机3D遥控器可携式导航设备特征1、以数字输出6轴或9轴的旋转矩阵、四元数(quaternion)、欧拉⾓格式(Euler Angle forma)的融合演算数据。
Mini 3D Pro云台固件升级软件
操作说明
注意
A 、该升级软件暂只支持Windows 操作系统。
B、请严格按照步骤操作,确保在软件上打开串口后再连接云台。
C 、如果需要读取云台当前使用的固件版本号请执行以下连接步骤3~7 步。
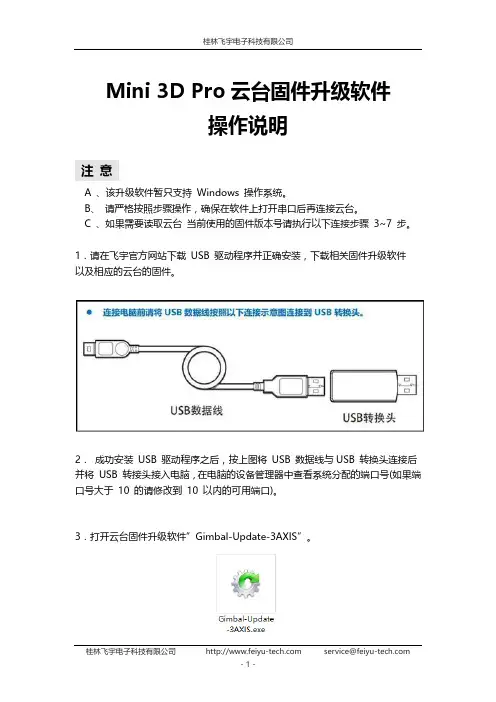
1.请在飞宇官方网站下载USB 驱动程序并正确安装,下载相关固件升级软件
以及相应的云台的固件。
2.成功安装USB 驱动程序之后,按上图将USB 数据线与USB 转换头连接后并将USB 转接头接入电脑,在电脑的设备管理器中查看系统分配的端口号(如果端口号大于10 的请修改到10 以内的可用端口)。
3.打开云台固件升级软件”Gimbal-Update-3AXIS”。
4.软件界面如图:
5. 点击“OPEN FILE”按钮,选择正确的云台固件。
6. 选择正确的端口号(与步骤2 中查看到的端口号一致),波特率(115200),点击“OPEN”按钮打开串口。
7. USB 数据线的另一头(USB Micro端)接到云台的功能端口,给云台通电。
成功连接之后软件窗口会提示连接成功和当前固件版本信息,且云台主体蓝色指示灯快速闪烁。
8. 点击“UPDATE”按钮,开始升级,软件窗口将提示升级进程。
9. 数据发送完成后提示如下,点击“确认”按钮以确认升级进程完成,关闭软件,并移除USB 线。
——END——
备注:我公司保留未经通知随时更改对本说明书的最终解释权和修改权!最新版本的更新将在我公司网站公布。
神舟IV号开发板以太网IAP固件升级功能演示:4.37.6.实验现象下载“\神舟IV号光盘\编译好的固件\以太网和触摸屏\【以太网】神舟IV号开发板以太网IAP固件升级.hex”到STM32神舟IV号开发板后,连接串口2(CN6)与PC,打开串口,设置波特率为115200,连接网口与STM32神舟IV号开发板,安装好SD卡,通过适配器或者USB为开发板供电。
STM32神舟IV号开发板支持10M/100M自适应,全双工半双工自适应。
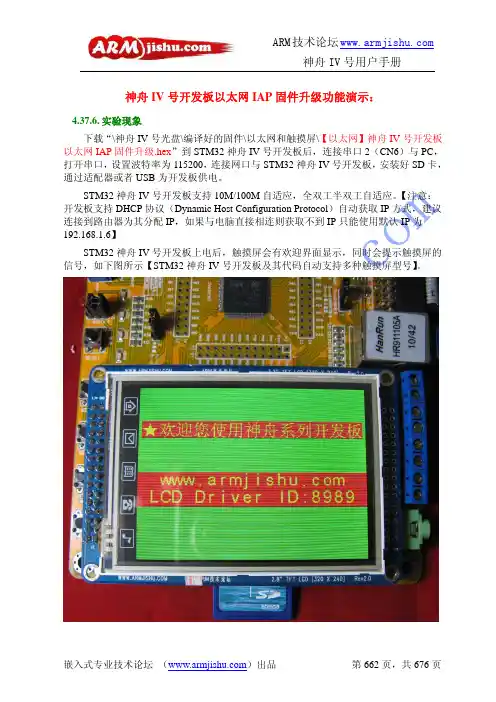
【注意:开发板支持DHCP协议(Dynamic Host Configuration Protocol)自动获取IP方式,建议连接到路由器为其分配IP,如果与电脑直接相连则获取不到IP只能使用默认IP为192.168.1.6】STM32神舟IV号开发板上电后,触摸屏会有欢迎界面显示,同时会提示触摸屏的信号,如下图所示【STM32神舟IV号开发板及其代码自动支持多种触摸屏型号】。
同时串口2会有以下提示,包含开发板的主频、LCD型号等信息:与此同时STM32神舟IV号开发板的【触摸屏】也会有提示消息显示STM32神舟IV号开发板支持DHCP协议(Dynamic Host Configuration Protocol)自动获取IP方式,如果已经连接到路由器则提示正在获取IP。
【如果与电脑直接相连则获取不到IP只能使用默认IP为192.168.1.6】STM32神舟IV号开发板支持DHCP协议(Dynamic Host Configuration Protocol)自动获取IP方式,如果已经连接到路由器则为其分配IP,很快便会出现如下界面提示IP 地址与网关。
【如果与电脑直接相连则获取不到IP只能使用默认IP为192.168.1.6】同时串口2会有以下提示,包含开发板的主频、LCD型号等信息:根据以上串口或者LCD提示,我们已经知道了STM32神舟IV号开发板的IP地址。
【如果与电脑直接相连则获取不到IP只能使用默认IP为192.168.1.6】此时打开PC的浏览器,在地址栏输入以上IP地址,会打开一个网页,要求输入用户名和密码,本实验中用户名和密码均为“armjishu”,注意均为小写字母。
mpu6050和mpu3050有什么不同和相同(基础介绍和区别分析)1、mpu6050基础介绍MPU6050是InvenSense公司推出的全球首款整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了安装空间。
MPU6050内部整合了3轴陀螺仪和3轴加速度传感器,并且含有一个第二IIC接口,可用于连接外部磁力传感器,并利用自带的数字运动处理器(DMP:DigitalMoTIonProcessor)硬件加速引擎,通过主IIC接口,向应用端输出完整的9轴融合演算数据。
有了DMP,我们可以使用InvenSense公司提供的运动处理资料库,非常方便的实现姿态解算,降低了运动处理运算对操作系统的负荷,同时大大降低了开发难度。
MPU6050的特点包括:①以数字形式输出6轴或9轴(需外接磁传感器)的旋转矩阵、四元数(quaternion)、欧拉角格式(EulerAngleforma)的融合演算数据(需DMP支持)②具有131LSBs//sec敏感度与全格感测范围为250、500、1000与2000/sec的3轴角速度感测器(陀螺仪)③集成可程序控制,范围为2g、4g、8g和16g的3轴加速度传感器④移除加速器与陀螺仪轴间敏感度,降低设定给予的影响与感测器的飘移⑤自带数字运动处理(DMP:DigitalMoTIonProcessing)引擎可减少MCU复杂的融合演算数据、感测器同步化、姿势感应等的负荷⑥内建运作时间偏差与磁力感测器校正演算技术,免除了客户须另外进行校正的需求⑦自带一个数字温度传感器⑧带数字输入同步引脚(Syncpin)支持视频电子影相稳定技术与GPS⑨可程序控制的中断(interrupt),支持姿势识别、摇摄、画面放大缩小、滚动、快速下降中断、high-G中断、零动作感应、触击感应、摇动感应功能⑩VDD供电电压为2.5V5%、3.0V5%、3.3V5%;VLOGIC可低至1.8V5%。
mpu6050控制舵机程序Chapter 1: Introduction to MPU6050 and Servo Control1.1 BackgroundThe MPU6050 is a popular motion sensor module that combines a 3-axis accelerometer and 3-axis gyroscope. It provides accurate measurements of motion and orientation, making it ideal for applications such as robotics, drones, and motion-based gaming. Additionally, servo motors are widely used in various fields, including robotics and automation, for precise control of angular position. This paper aims to explore the application of theMPU6050 sensor for controlling a servo motor.1.2 ObjectivesThe main objective of this paper is to develop a program that utilizes the MPU6050 sensor to control a servo motor. Specifically, the program will read the sensor data to detect changes in motion and orientation and correspondingly adjust the position of the servo motor. The program will be implemented using Arduino, a popular open-source electronics platform.Chapter 2: MPU6050 and Servo Motor Interface2.1 MPU6050 SensorThe MPU6050 sensor is a 6-DOF (Degrees of Freedom) module that combines a 3-axis accelerometer and 3-axis gyroscope. It communicates with the Arduino board using the I2C serial interface. The sensor provides motion and orientation data in the form of raw sensor values.2.2 Servo MotorA servo motor is a rotary actuator that allows precise control of angular position. It consists of a motor, a control circuit, and a feedback system. Servo motors are widely used in various applications, including robotics and automation. In this paper, a standard servo motor with a rotation range of 0 to 180 degrees will be used.2.3 Interface DesignThe MPU6050 and servo motor will be interfaced with the Arduino board. The sensor's SDA and SCL pins will be connected to the Arduino's I2C pins, while the servo motor's control pin will be connected to one of the Arduino's PWM pins. The Arduino will act as the bridge between the sensor and the servo motor, processing the sensor data and generating appropriate control signals for the servo motor.Chapter 3: Program Implementation3.1 Sensor CalibrationBefore using the sensor, a calibration process is necessary to obtain accurate readings. The program will include a calibration routine that measures the sensor's zero-g offset and sensitivity. This data will be used to compensate for measurement errors and provide accurate motion and orientation information.3.2 Data Reading and ProcessingThe program will continuously read the sensor's raw data, including accelerometer and gyroscope readings. The accelerometer data will be used to detect changes in motion, whilethe gyroscope data will provide information about the orientation. The program will process this sensor data to calculate the desired servo motor position.3.3 Servo Motor ControlBased on the processed sensor data, the program will generate appropriate control signals for the servo motor. The position of the servo motor will be adjusted proportionally to the detected motion and orientation changes. The servo motor position will be converted to the corresponding pulse width modulation (PWM) signal, which will set the desired position of the servo motor.Chapter 4: Experiment and Results4.1 Experimental SetupAn experimental setup will be created to validate the performance of the program. The MPU6050 sensor and the servo motor will be connected to the Arduino board, and the program will be uploaded to the board. Various motion and orientation changes will be induced to observe the corresponding servo motor movement.4.2 Results and AnalysisThe results of the experiment will be analyzed to evaluate the performance of the program in accurately controlling the servo motor based on the MPU6050 sensor data. The accuracy of the servo motor's position and response time will be assessed. Any limitations or improvements will be discussed.4.3 ConclusionIn conclusion, this paper presented a program for controlling aservo motor using the MPU6050 sensor. The implementation and experimental results demonstrate the effectiveness of the programin accurately adjusting the servo motor position based on motion and orientation changes. Further enhancements for real-time applications and other potential improvements will be discussedfor future work.探索宇宙——人类科学的壮举尽管人类在探索宇宙这一任务上还有很长的路要走,但我们已经取得了一些令人瞩目的成就。
lvgl移植流程
移植LVGL库到特定平台的流程如下:
1. 确定目标平台:首先,确定您要将LVGL移植到的平台,例如嵌入式系统或特定的开发板。
2. 获取LVGL库文件:从LVGL官方网站下载最新版本的LVGL库文件,并解压缩到您的开发环境中。
3. 配置平台相关的驱动:在移植之前,您需要根据目标平台的硬件和操作系统特性进行配置。
例如,如果您使用的是
STM32系列的微控制器,您需要配置RTC、SPI、I2C等外设的驱动程序。
4. 创建并配置驱动:LVGL使用硬件抽象层(HAL)来与底层硬件进行通信。
根据目标平台的需求,您需要创建适当的HAL驱动,并配置其正确的引脚、时钟和初始化参数。
5. 配置显示器:根据目标平台的显示设备,您需要配置LVGL 库来正确初始化和使用显示器。
这通常涉及到配置像素格式、分辨率和接口类型等参数。
6. 配置输入设备:如果您的平台具有触摸屏或其他输入设备,您需要配置LVGL库来正确初始化和使用这些设备。
同样,这涉及到配置引脚、时钟和初始化参数等。
7. 编写适配层代码:根据LVGL使用的操作系统,您可能需
要编写适配层代码来支持您的特定平台。
这包括操作系统的任务调度、内存分配和输入事件处理等。
8. 编译和链接:通过在您的开发环境中编译和链接所有相关文件来构建LVGL库。
9. 运行和测试:将生成的可执行文件烧录到目标平台上,并测试LVGL库在该平台上的运行情况。
请注意,LVGL库的移植可能因平台而异,以上流程仅供参考。
您可能需要根据特定平台和应用程序的要求进行适当的修改和调整。
初始化MPU6050//初始化MPU6050,根据需要请参考pdf进行修改u8 Init_MPU6050(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE );GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_Init(GPIOB, &GPIO_InitStructure);if(Single_Read(MPU6050_Addr,WHO_AM_I)==0x68){Single_Write(MPU6050_Addr,PWR_MGMT_1, 0x00);//电源管理1,解除休眠状态,时钟为内部8MHzSingle_Write(MPU6050_Addr,SMPLRT_DIV, 0x07);//采样速率125HzSingle_Write(MPU6050_Addr,CONFIG,0x06);//不使能FSYNC,不使用外同步采样速率;DLPF_CFG[2~0],设置任意轴是否通过DLPF,//典型值:0x06(5Hz)低通滤波器带宽5Hz,//对加速度和陀螺仪都有效,输出频率为1kHz,决定SMPLRT_DIV的频率基准Single_Write(MPU6050_Addr,GYRO_CONFIG, 0x08);//不自测,量程设置500°/s /*?GYRO 量程单位系数+-250 deg/s 131 LSB/deg/s 初始化hex 0x00+-500 deg/s 65.5 LSB/deg/s 0x08+-1000 deg/s 32.8 LSB/deg/s 0x10+-2000 deg/s 16.4 LSB/deg/s 0x18*/Single_Write(MPU6050_Addr,ACCEL_CONFIG, 0x00);//不自测,量程设置2g/* Accle any axe+-2 g 16384 LSB/g+-4 g 8192 LSB/g+-8 g 4096 LSB/g+-16 g 2048 LSB/g*/return 0;}return 1;}//******读取MPU6050数据****************************************//**************************************//读取mpu6050内部数据,两个字节,合成数据//**************************************s16 GetData(u8 REG_Address) //返回值为有符号的整形,16位{s16 H=0,L=0;H = Single_Read(MPU6050_Addr,REG_Address); //先读高字节,再读低字节L = Single_Read(MPU6050_Addr,REG_Address+1);return (H<<8)+L; //合成数据,为有符号整形数}//-------------加速度部分解算角度------------------s32 Read_Acc(void){s32 Accel_x; //mpo6050读出的X轴加速度s32 Accel_z; //mpu6050读出的z轴加速度//-------------加速度部分解算------------------/*使用是加速度轴x轴正向朝向小车行径方向,y轴陀螺仪的正向逆时针方向。
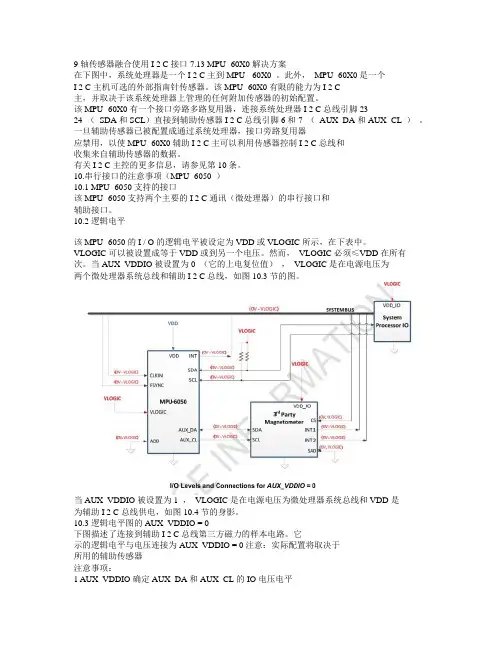
9轴传感器融合使用I 2 C接口7.13 MPU- 60X0解决方案在下图中,系统处理器是一个I 2 C主到MPU - 60X0 。
此外,MPU- 60X0是一个I 2 C主机可选的外部指南针传感器。
该MPU- 60X0有限的能力为I 2 C主,并取决于该系统处理器上管理的任何附加传感器的初始配置。
该MPU- 60X0有一个接口旁路多路复用器,连接系统处理器I 2 C总线引脚2324 (SDA和SCL)直接到辅助传感器I 2 C总线引脚6和7 (AUX_DA和AUX_CL )。
一旦辅助传感器已被配置成通过系统处理器,接口旁路复用器应禁用,以使MPU- 60X0辅助I 2 C主可以利用传感器控制I 2 C总线和收集来自辅助传感器的数据。
有关I 2 C主控的更多信息,请参见第10条。
10.串行接口的注意事项(MPU -6050 )10.1 MPU -6050支持的接口该MPU -6050支持两个主要的I 2 C通讯(微处理器)的串行接口和辅助接口。
10.2逻辑电平该MPU- 6050的I / O的逻辑电平被设定为VDD或VLOGIC所示,在下表中。
VLOGIC可以被设置成等于VDD或到另一个电压。
然而,VLOGIC必须≤VDD在所有次。
当AUX_VDDIO被设置为0 (它的上电复位值),VLOGIC是在电源电压为两个微处理器系统总线和辅助I 2 C总线,如图10.3节的图。
当AUX_VDDIO被设置为1 ,VLOGIC是在电源电压为微处理器系统总线和VDD是为辅助I 2 C总线供电,如图10.4节的身影。
10.3逻辑电平图的AUX_VDDIO = 0下图描述了连接到辅助I 2 C总线第三方磁力的样本电路。
它示的逻辑电平与电压连接为AUX_VDDIO = 0注意:实际配置将取决于所用的辅助传感器注意事项:1 AUX_VDDIO确定AUX_DA和AUX_CL的IO电压电平(0 =设置输出电平相对于VLOGIC )2 CLKOUT的被引用到VDD。
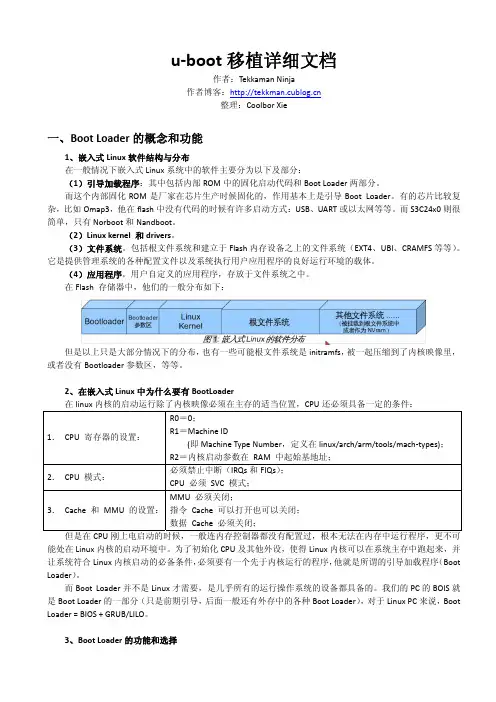
u‐boot移植详细文档作者:Tekkaman Ninja作者博客:整理:Coolbor Xie一、Boot Loader的概念和功能1、嵌入式Linux软件结构与分布在一般情况下嵌入式Linux系统中的软件主要分为以下及部分:(1)引导加载程序:其中包括内部ROM中的固化启动代码和Boot Loader两部分。
而这个内部固化ROM是厂家在芯片生产时候固化的,作用基本上是引导Boot Loader。
有的芯片比较复杂,比如Omap3,他在flash中没有代码的时候有许多启动方式:USB、UART或以太网等等。
而S3C24x0则很简单,只有Norboot和Nandboot。
(2)Linux kernel 和drivers。
(3)文件系统。
包括根文件系统和建立于Flash内存设备之上的文件系统(EXT4、UBI、CRAMFS等等)。
它是提供管理系统的各种配置文件以及系统执行用户应用程序的良好运行环境的载体。
(4)应用程序。
用户自定义的应用程序,存放于文件系统之中。
在Flash 存储器中,他们的一般分布如下:但是以上只是大部分情况下的分布,也有一些可能根文件系统是initramfs,被一起压缩到了内核映像里,或者没有Bootloader参数区,等等。
2、在嵌入式Linux中为什么要有BootLoader在linux内核的启动运行除了内核映像必须在主存的适当位置,CPU还必须具备一定的条件:1. CPU 寄存器的设置: R0=0;R1=Machine ID(即Machine Type Number,定义在linux/arch/arm/tools/mach‐types); R2=内核启动参数在 RAM 中起始基地址;2. CPU 模式: 必须禁止中断(IRQs和FIQs); CPU 必须 SVC 模式;3. Cache 和 MMU 的设置: MMU 必须关闭;指令 Cache 可以打开也可以关闭; 数据 Cache 必须关闭;但是在CPU刚上电启动的时候,一般连内存控制器都没有配置过,根本无法在内存中运行程序,更不可能处在Linux内核的启动环境中。
UBOOT移植操作1. 确定目标平台和硬件:首先需要了解目标平台的硬件架构、处理器类型、存储设备(如 Flash 或者 SD 卡)等重要信息。
同时需要获取目标平台的硬件参考手册或者相关文档。
2.设置交叉编译工具链:UBOOT是使用C和汇编语言编写的,因此需要使用交叉编译工具链来生成可在目标平台上运行的二进制可执行文件。
交叉编译工具链包括交叉编译器、链接器和调试器等工具,这些工具需要针对目标平台进行配置。
4. 配置 UBOOT 环境:进入 UBOOT 源代码目录,运行 `make menuconfig` 命令来配置 UBOOT 的环境。
这个命令会打开一个图形界面,可以在其中选择需要的功能、驱动程序和选项。
根据目标平台的硬件特性和需求,选择适当的选项。
5. 修改配置文件:UBOOT 需要一个配置文件(通常是`include/configs/<target.h>`),在这个文件中需要将目标平台的硬件配置信息填入。
这些信息包括芯片型号、Flash 存储器地址等。
还需要设置启动参数,如内核地址、根文件系统地址等。
6. 编译 UBOOT:运行 `make` 命令来编译 UBOOT。
根据配置和硬件平台的不同,可能需要选择不同的编译选项。
编译过程会生成一个 UBOOT 头文件(u-boot.bin)和其他必要的文件。
7.将UBOOT烧录到目标平台:使用烧录工具(如JTAG烧录器、USB烧录器或者SD卡等)将编译好的UBOOT烧录到目标平台的存储设备中。
具体的烧录方法和工具依赖于目标平台的配置。
8.测试和调试:将烧录好的UBOOT安装到目标平台后,通过串口或者网络连接到目标平台,使用终端工具进行测试和调试。
可以通过串口输出来查看启动过程中的日志和错误信息,或者使用调试工具来分析程序执行的问题。
9.优化和定制:根据需求对UBOOT进行优化和定制。
可以修改配置文件、增加功能模块或者修改代码,以达到更好的性能和适应特定需求的目的。
MPU6050学习汇总简介MPU6050模块是InvenSense公司推出,三轴加速度,三轴角速度。
陀螺仪主要测量物体转动的角速度平衡小车利用加速度计测出重力加速度在x,y,z轴的分量,然后利用各个方向的分量与重力加速度的比值来计算出小车大致的倾角。
-----只适合静止时。
小车在动态时,受电机的作用肯定有一个前进或者后退方向的作用力,而加速度计测出的结果是,重力加速度与小车运动加速度合成得到一个总的加速度在三个方向上的分量。
---动态实现记步看了上面的分析大家可能会疑惑——仅仅用一个加速计怎么能实现记步和睡眠质量检测呢?其实确实可以!因为加速计可以实时获取自身的X\Y\Z三个轴向的加速度。
当其静止时合加速度会在重力加速度附近波动;当佩戴者处于深度睡眠过程中时,其合加速度将呈现出长时间的稳定于重力加速度附近;当其随着运动的佩戴者手臂而做周期性摆动时,其数据也是有一定规律可循的。
这样,设计时只要通过分析从加速计获的数据就能实现对运动或睡眠质量的记录。
寄存器值转换成实际值加速度传感器的测量量程为正负2g(这里的g为重力加速度),陀螺仪的量程为正负2000°/s。
所以要用下面的公式进行转化:记步算法设计当MPU6050随着运动的佩戴者手臂而做周期性摆动时,其数据也是有一定规律可循的。
简单起见我们只分析合加速度:一个摆臂周期其合加速度会在重力加速度上下波动,如图6_1只要选取合适的阈值(黑线代表阈值),每次检测出合加速度大于该阈值则认为是一次摆臂,从而可以实现记步的功能。
这里要特别说明下:如果想把你的手环推向市场,就要通过大量分析摆臂数据建立一套更好的记步算法.可编程静止中断静止中断也采用数字高通滤波器(DHPF)以及同样的阈值、计数机制。
每根轴上的测量值通过DHFT后必须小于事先规定的阈值,可在ZRMOT_THR寄存器设置。
这会使计数器值加1,当达到在ZRMOT_DUR中设置的计数器阈值时,则产生静止中断。
传感器实战全攻略
Arduino的MPU 6050代码和连接
中的代码。
图8-5展示了Arduino的连接图。
搭建完毕后运行案例8-3
图8-5
Arduino的MPU 6050(加速度传感器+陀螺仪)电路
这段代码难度超高!和本书的其他案例相比,本代码含有很多较难理解的概念。
如果你对字节顺序、移位以及结构体表示难以理解,那么没有必要深究了,直接使用代码和相应的结果即可。
如果你想理解代码的原理,可以参考代码后的说明,例如,第171页的“十六进制、二进制和其他数制系统”以及第174页的“位运算”。
案例8-3.mpu_6050.ino
// mpu_6050.ino -输出加速度(m/s**2)和角速度(gyro,deg/s)
// (c) - Karvinen, Karvinen, Valtokari
#include <Wire.h>// A
const char i2c_address=0x68;// B
const unsigned char sleep_mgmt=0x6B;// C
const unsigned char accel_x_out =0x3B;
struct data_pdu // D
{
int16_t x_accel;// E
int16_t y_accel;
int16_t z_accel;
int16_t temperature;// F
int16_t x_gyro;// G
int16_t y_gyro;
int16_t z_gyro;
};
void setup() {
164。
uCOS-II在STM32上的移植步骤前言:说点废话,网上有很多关于uCOS-ii 移植的文章,好多都是千篇一律,理论性很强,分析了一大堆虚头巴脑的东西,真想问他们,你确定你分析的这些东西是需要你做的工作吗?实操性严重欠缺。
这方面我也走了很多弯路,下面就将自己的移植过程一步步的记录下来,也给大家做做参考。
首先,简单总结一下移植的大概过程:(1)去uC/OS-ii 官网下载你要移植芯片CPU 的相关案例,不一定完全对应,那就找相应系列吧。
(2)编程环境一般有两种,分别是IAR 和MDK,这个根据你自己的编程环境进行下载。
(3)本案例需要将uC/OS-II 移植到STM32F103ZET6 上,而我使用的编程环境是MDK,很遗憾,官网上提供的案例是基于IAR 的,所以要基于IAR 的案例进行更改。
(4)使用MDK 创建一个无操作系统的最简单程序,确保这个程序能够使用,这样做的目的是为了一步步的排查错误,假如无操作系统时,都有错误,移植过程中也肯定会有编译错误,那么在排查错误的时候也就增加了难度,不会写物操作系统的简单程序怎么办。
那就不要往下看了。
(5)移植的最大的改动主要有两部分,一个是一些头文件的增减,另外一个就是向量表中PendSV_Handler 和SysTick_Handler 的修改。
这里我要吐槽一下,网上说了一大堆关于什么OS_CPU.H 的更改还有各种函数的的分析,这都是扯淡。
这些根本就不用移植者去修改,官网提供的案例都已经提供了,除非你选择移植的CPU 是比较偏的,那么这些东西需要移植者自己去编写。
好了,下面就开始详细的记录怎么去移植。
一、创建一个无操作系统的简单裸板系统1.创建源文件工程文件夹,如下图所示:其中文件夹CMSIS 为内核的接口,包含的文件如下图文件夹STM32_StdPeriph 为固件驱动文件夹,这个把STM32 的固件全都添加进去即可。
文件夹User 为其他文件,如下图所示:文件夹Output 和。
MiniBalanceV3.5【大功率版】程序结构和数据融合、控制算法说明认真读完整篇文档有利于您更好的理解整个平衡小车程序。
开发平台:MDK5.11、我们的代码使用MPU6050的INT的引脚每5ms触发的中断作为控制的时间基准,严格保证系统的时序!2.根据不同阶层的学习者,我们提供了复杂程度不同的代码:1.针对普通用户,提供了以下三个代码:MiniBalanceV3.5平衡小车源码(DMP版)MiniBalanceV3.5平衡小车源码(互补滤波版)MiniBalanceV3.5平衡小车源码(卡尔曼滤波版)以上代码除了使用DMP、卡尔曼滤波、互补滤波分别获取姿态角外,还提供了超声波避障代码。
2.针对入门用户,提供以下代码:MiniBalanceV3.5平衡小车源码(精简入门版)去除所有附加的代码,使用最少的代码量实现小车直立。
3.针对大神用户,提供以下代码:MiniBalanceV3.5平衡小车源码(顶配版含无线模块和线性CCD)普通版的基础上增加无线模块的驱动和线性CCD的采集代码,大家可以拓展体感控制和小车巡线。
3.整个程序应用了STM32大量的资源:ADC模块:采集电阻分压后的电池电压,采集模拟CCD摄像头数据TIM1:初始化为PWM输出,CH1,CH4输出双路10KHZ的PWM控制电机TIM2:初始化为正交编码器模式,硬件采集编码器1数据TIM3:CH3初始化为超声波的回波采集接口。
TIM4:初始化为正交编码器模式,硬件采集编码器2数据USART1:通过串口1把数据发到串口调试助手USART3:通过串口3接收蓝牙遥控的数据,接收方式为中断接收。
并发送数据给app。
IIC:利用IO模拟IIC去读取MPU6050的数据,原理图上MPU6050链接的是STM32的硬件IIC接口,但是因为STM32硬件IIC不稳定,所以默认使用模拟IIC,大家可以自行拓展。
SPI:利用IO模拟SPI去驱动OLED显示屏,硬件SPI驱动NRF24L01 GPIO:读取按键输入,控制LED,控制电机使能和正反转SWD:提供用于在线调试的SWD接口EXTI:由MPU6050的INT引脚每5ms触发一次中断,作为控制的时间基准4.程序主要用户文件说明如下:●Source Group1◆Startup_stm32f10x_md.s:stm32的启动文件●User◆Minibalance.c:放置主函数,并把超声波读取和人机交互等工作放在死循环里面。
Step1 :将原启动文件替换为 startup_stm32f10x_hd.s
Step2:尝试编译,报错,发现 #include "upload.h" #include "math.h"这两句的“”紧跟在#include后边,分别加上空格,搞定
Step3:再次编译依然报错,路径中有乱码,于是进入文件夹,发现有一文件夹名为“上位机”,将其改为computer,然后在manage project items和tagart中都修改
文件路径。
Step4:再次编译,有一个
warning,..\HARDWARE\MPU6050\inv_mpu_dmp_motion_driver.c(1344): warning: #223-D: function "get_ms" declared implicitly 。
暂时无视
Step5:修改devcie,将器件修改为STM32F103RC,晶振频率改为8MHz
Step6:硬件连接,
#define SCL PEout(8)
………..
#define SDA PEout(9),
可以看出楼主的6050的SCL和SDA分别接在了PE8和PE9上,而我准备接在PC12
和PC11上,与原子哥的I2C实验例程相同,故改为
#define SCL PCout(12)
………..
#define SDA PCout(11),其他地方做同样修改
Step7:检查6050的地址,为0x68,与我的6050模块一样,不用改
Step8:检查USART的输出引脚,为PA9、PA10,和miniv3板子一样,不用改
Step9:编译,使用软件仿真ok,使用jlink仿真,有问题,不能擦写flash。
发现问题原因是Jlink设置flash download那里没有选择flash device。
选择512k,jlink仿真
ok~
Step10:烧写程序,mini开发板显示TFT test 95,开发板无其他反应
Step11:突然想起来第六步改过之后没有使能portc时钟,没有设置IO状态,找到void i2cInit(void)
{
RCC->APB2ENR|=1<<4; //使能PORTE口时钟
GPIOE->CRH&=0XFFFFFF00;
GPIOE->CRH|=0X00000055;//IO状态设置
改为: RCC->APB2ENR|=1<<4; //使能PORTC口时钟
GPIOC->CRH&=0XFFF00FFF;
GPIOC->CRH|=0X00033000;//IO状态设置
GPIOC->ODR=3<<11; //PC11/12输出高和原子哥的I2C实验相同。
改完之后,这下牛逼了。
LCD整个不亮了啊,但是串口那边接收到了
pu initialization complete......
mpu_set_sensor complete ......
mpu_configure_fifo complete ......
mpu_set_sample_rate complete ......
dmp_load_motion_driver_firmware complete ......
dmp_set_ori
说明6050初始化成功了,有一点成果了!,全速运行。
Oye,有串口输出!!!有数据!!。