开环与闭环控制系统的分析
- 格式:docx
- 大小:219.15 KB
- 文档页数:12

高压直流输电系统中开环控制和闭环控制的比较分析研究随着现代电力系统的不断发展和进步,高压直流输电系统已经成为了电力系统中广泛采用的一种方式。
而在高压直流输电系统中,控制系统是其必不可少的一部分。
然而,在控制系统中,开环控制和闭环控制又是两种不同的控制方式。
本文将对高压直流输电系统中的开环控制和闭环控制进行比较分析研究。
一、高压直流输电系统中的开环控制开环控制是指控制量与被控制量之间无反馈,只通过给定的控制量来实现控制的方式。
在高压直流输电系统中,开环控制通常用于控制电压等参数,如交流/直流变频器PWM控制、失控电弧控制和谐波滤波器无功控制等。
但开环控制的缺点也是显而易见的。
由于无反馈,开环控制往往无法动态地控制输出参数。
因此,当被控制变量发生变化时,开环控制的效果就会变得很差,并且很难落实到实际应用中。
二、高压直流输电系统中的闭环控制闭环控制是指通过测量被控制变量的反馈信号,实现控制量与被控制量之间的关系,从而达到实时监测和调整的目的。
在高压直流输电系统中,闭环控制一般用于控制某些电气参数和调节器的调节。
同开环控制相比,闭环控制的优点在于能够有效地消除外部干扰和内部扰动,从而提高控制质量和稳定性。
同时,闭环控制也能动态地调整输出参数,以达到更加精确的控制效果。
三、开环控制和闭环控制的比较分析开环控制和闭环控制都有各自的优缺点。
在高压直流输电系统中,开环控制和闭环控制的选择往往取决于具体的控制需求。
1、适用场景不同开环控制适用于只要求一定输出的控制场合,如简单电源控制,调节最大输出量等场合;而闭环控制适用于要求更高的控制精度和稳定性的场合。
2、灵活性不同开环控制通常需要根据具体场合所需的输出进行调整,其灵活性较差。
而闭环控制可以通过自动校正控制或者人工调节PID参数,以适应不同的操作需求。
3、复杂性不同开环控制的实现较为简单,只需要给定具体的输入变量就可以实现控制。
而闭环控制则涉及多个参数,如P、I、D等参数的选择和调整,比较复杂。

开环和闭环
引言
介绍
开环
开环的英文名是open-loop。
开环相对于闭环而言,也叫开环控制系统。
意思就是不将控制的结果反馈回来影响当前控制的系统。
开环就相当于单向操作,我们给控制器一个值,控制器就按这个值操作控制。
也就是只控制输出,不计后果的控制。
这种系统比较简单,容易掌握使用,工作稳定,但精度和速度的提高受到限制,所以一般仅用于不考虑外界影响,或惯性小、精度要求不高的一些系统。
打个比方,开环相当于开水龙头,你拧到什么位置,水龙头就出多少大小的水,没有反馈信号。
闭环
开环与闭环的区别
工作原理不同
开环控制系统不能检测误差,也不能校正误差。
控制精度和抑制干扰的性能都比较差,而且对系统参数的变动很敏感。
因此,一般仅用于可以不考虑外界影响,或惯性小,或精度要求不高的一些场合。
闭环控制的优点是充分发挥了反馈的重要作用,排除了难以预料或不确定的因素,使校正行动更准确,更有力。
但它缺乏开环控制的那种预防性。
如在控制过程中造成不利的后果才采取纠正措施。
因此,一般广泛应用于对外界环境要求比较高、高精度场合。
结构组成不同
开环系统没有检测设备,组成简单,但选用的元器件要严格保证质量要求。
闭环系统具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性。
稳定性不同
开环控制系统的稳定性比较容易解决。
闭环系统中反馈回路的引入增加了系统的复杂性。
后续。

《闭环控制系统》教案分析一.开环和闭环控制系统的定义分析二.开环和闭环控制系统的区别及判断方法三.闭环控制系统的方框结构及与实际系统的对应关系四.闭环控制系统的各部分结构的基本概念的归纳总结五.开闭环,自动和手动控制系统的总结问题研讨1:.人开电灯的控制方式问提研讨:人打开电灯开关后,不看电灯是否亮不亮,这是一种什么控制?人打开电灯开关后,要看电灯是否亮不亮,如不亮,要多次开关电灯,甚至检修开关,直到开亮为止,这是一种什么控制?2.人开汽车人手握方向盘开汽车是什么控制方式?人两手离开方向盘去发手机短信,有拐弯时,或有情况时手再扶方向盘,这种开汽车方式是什么控制方式?问提研讨2:自动控制系统是否一定是闭环控制?举例说明之按照控制的总定义,是否有人参加的控制系统一定是闭环控制系统?开环控制系统一定没有检测,反馈回路吗?水箱水位自动控制系统中,被控对像是水箱吗?现在有些教材中出现“输出量”的概念,它是什么?它等于被控量吗?一.开环和闭环控制系统的定义分析例1.飞镖(图4-7)是同学们都很熟悉的运动。
我们在投掷飞镖时,首先会在脑子里确定一个希望射中的目标,然后再根据场地的情况及自己的经验,控制手臂的投掷动作,将飞镖掷出。
显然,在飞镖掷出后,飞镖的飞行就不可控制了,能否命中目标,取决于飞镖在投掷时的初始状态,即投掷者的投掷水平。
实际上,如果我们希望某一事物按照自己的意愿发展,就要对其进行干预,这种根据自己的目的,通过一定的手段使事物沿着某一确定的方向发展,就形成了控制。
二.开环和闭环控制系统的区别及判断方法开、闭环控制的定义能将控制的结果反馈回来与希望值进行比较,并根据它们的误差及时调整控制的系统,称为闭环控制系统。
而不是将控制的结果反馈回来影响控制作用的系统,称为开环控制系统。
系统中将控制的结果反馈回来的部分,称为反馈环节。
闭环控制系统都有反馈环节,所以有时又称闭环控制系统为反馈控制系统。
反馈环节是闭环控制系统的重要特征。

日常生活中的开环和闭环控制系统的例子开环控制系统和闭环控制系统是控制工程中常用的两种控制方式。
开环控制系统是指输出不受控制系统内部状态的影响,而闭环控制系统是指输出受控制系统内部状态的影响。
下面将从日常生活中的例子来详细介绍这两种控制系统。
1. 音响控制系统:开环控制系统:当我们使用遥控器调节音响音量时,开环控制系统会根据我们的指令直接调节音响的音量,而不会考虑当前音量是否合适。
闭环控制系统:当我们使用有音量调节功能的耳机时,闭环控制系统会通过内置的传感器检测当前的音量,并根据我们的指令调整音量大小,使得输出音量达到我们期望的水平。
2. 温度调节器:开环控制系统:当我们使用普通的电风扇来调节室内温度时,开环控制系统会根据我们的指令调节风扇的风速,但无法感知室内温度是否达到我们期望的温度。
闭环控制系统:当我们使用具有温度传感器的空调来调节室内温度时,闭环控制系统会通过感知室内温度,并根据我们的指令调整制冷或制热模式,从而使得室内温度稳定在我们期望的范围内。
3. 洗衣机:开环控制系统:当我们使用普通的洗衣机洗衣服时,开环控制系统会按照我们的指令进行洗涤和漂洗等操作,但无法感知衣物的清洁程度。
闭环控制系统:当我们使用具有传感器的智能洗衣机时,闭环控制系统会通过感知洗涤水的浑浊度来判断衣物的清洁程度,并根据我们的指令调整洗涤和漂洗的次数,从而使得洗衣效果更好。
4. 自动灯控系统:开环控制系统:当我们手动控制灯的开关时,开环控制系统会根据我们的指令直接打开或关闭灯,而不会考虑当前环境的亮度。
闭环控制系统:当我们使用具有光敏传感器的自动灯控系统时,闭环控制系统会通过感知环境的亮度,并根据我们的指令调整灯的亮度,使得室内光照始终保持在一个合适的水平。
5. 汽车巡航控制系统:开环控制系统:当我们在高速公路上使用定速巡航功能时,开环控制系统会根据我们的指令维持车辆的恒定速度,而不会考虑前方交通情况。
闭环控制系统:当我们使用具有雷达传感器的自适应巡航控制系统时,闭环控制系统会通过感知前方车辆的距离和速度,并根据我们的指令调整车辆的速度,以保持与前车的安全距离。

通用技术开环和闭环控制系统引言在现代工程领域,控制系统被广泛应用于各种设备和机器中,用于监测和调节系统的运行状态。
控制系统根据设定的目标值对系统进行控制,以使系统达到预期的工作状态。
在控制系统中,存在两种基本的控制策略,即开环控制和闭环控制。
本文将对开环控制和闭环控制的基本概念和技术进行介绍,并讨论它们在通用技术中的应用。
开环控制系统开环控制系统是一种基本的控制策略,它通过将输入信号直接传递给执行器来控制系统的输出。
在开环控制系统中,不考虑系统的实际输出和期望输出之间的差异,也不对实际输出进行测量和反馈。
因此,开环控制系统的控制效果主要依赖于输入信号和执行器的性能。
开环控制系统具有简单、稳定等优点,适用于一些简单且可预测的系统。
例如,开环控制系统经常应用于家用电器中,比如电磁炉和微波炉等。
在这些设备中,输入信号和执行器之间的关系相对简单,因此开环控制系统可以实现较好的控制效果。
然而,开环控制系统也存在一些缺点,例如对参数变化和噪声的鲁棒性较差。
闭环控制系统闭环控制系统是一种比较复杂的控制策略,它将系统的实际输出与期望输出之间的差异作为反馈信号,通过调节输入信号控制系统的输出。
闭环控制系统通过不断测量和反馈实际输出来实现对系统的精确控制,并具有较好的鲁棒性和适应性。
闭环控制系统通常包括传感器、控制器和执行器等组件。
传感器用于测量系统的实际输出,控制器根据实际输出和期望输出之间的差异计算调节量,执行器根据控制器的输出执行相应的操作。
闭环控制系统通过不断测量和反馈实际输出,使系统的输出逐渐趋近于期望输出,从而实现对系统的控制。
闭环控制系统在工业自动化、机器人技术等领域得到广泛应用。
例如,在自动驾驶车辆中,闭环控制系统可以通过传感器测量车辆的位置和速度,并根据目标路线和速度计算调节量,控制车辆的行驶方向和速度。
闭环控制系统的高精度和鲁棒性可以使自动驾驶车辆在复杂的交通环境中准确地执行各种操作。
开环和闭环的比较开环控制系统和闭环控制系统的选择取决于实际应用中的需求和要求。

《开环控制和闭环控制》教学设计方案(第一课时)一、教学目标1. 理解开环控制和闭环控制的定义和基本原理。
2. 了解开环控制和闭环控制在实际生活和工业中的应用。
3. 掌握如何识别和应用不同的控制系统类型。
4. 培养学生的观察能力和分析问题能力。
二、教学重难点1. 教学重点:理解开环控制和闭环控制的基本原理,并能够识别和应用不同类型的控制系统。
2. 教学难点:如何将开环控制和闭环控制原理应用到实际问题中,以及如何培养学生的观察和分析能力。
三、教学准备1. 准备相关教学视频和案例,以便在教室上进行展示。
2. 准备教学道具(如模拟控制系统),以便学生能够更好地理解控制系统的运作原理。
3. 准备教室练习材料,以便学生能够进行实践操作。
4. 提前与学生沟通,了解学生的学习基础和兴趣,以便更好地组织教室教学。
四、教学过程:本节课的教学设计将注重学生实践与理论学习的结合,通过多元化的教学方式,帮助学生更好地理解和掌握开环控制和闭环控制的基本观点和应用。
1. 导入新课:起首,通过简单的实例引导学生理解开环控制和闭环控制的基本观点。
例如,通过比照手动驾驶汽车和自动驾驶汽车,帮助学生理解开环控制的特点。
2. 理论学习:为学生讲解开环控制和闭环控制的基本原理,包括系统的组成、工作原理以及特点。
同时,通过具体的数学模型和公式,帮助学生理解这两种控制系统的本质区别。
3. 实践操作:组织学生进行小组实验,利用简单的设备进行开环控制和闭环控制的模拟操作。
学生可以通过观察实验结果,进一步理解这两种控制系统的应用和优缺点。
4. 教室讨论:组织学生进行教室讨论,鼓励学生分享他们在实践操作中的经验和感受,以及这两种控制系统在实际应用中的优缺点和局限性。
同时,教师也可以引导学生思考如何将这两种控制系统结合应用,以提高系统的性能。
5. 总结回顾:在课程的最后,进行总结回顾,帮助学生梳理本节课的主要内容,强调开环控制和闭环控制的重要性和应用。

开环增益与闭环增益的基本原理1. 自动控制系统概述自动控制是一种通过测量并比较被控对象的输出与期望输出来实现对被控对象的控制的过程。
当输出不符合期望时,控制器会对输入发出调节信号,以使输出趋近于期望值。
自动控制系统可以分为开环控制系统和闭环控制系统。
2. 开环控制系统在开环控制系统中,控制器输出信号不依赖于被控对象的实际输出情况。
开环控制系统的输出信号仅根据输入信号进行调整,无法对被控对象的实际输出进行反馈调节。
开环控制系统的特点是简单、实时性强,但对被控对象变化不敏感,容易受到外部干扰的影响。
开环控制系统主要用于对被控对象的特性已经非常清楚,且外部干扰影响较小的情况下进行控制。
3. 开环增益开环增益是指开环控制系统中输入与输出的关系。
它表示了系统输出与输入之间的比例关系。
开环增益越大,表示输入对输出的影响越大。
以一个简单的电路为例,开环增益可以表示为输入电压与输出电压之间的比例关系。
如果输入电压为Vin,输出电压为Vout,开环增益可以表示为开环增益K乘以输入电压Vin,即Vout = K * Vin。
开环增益K可以通过电路的参数来确定,例如放大器的放大倍数。
4. 闭环控制系统闭环控制系统通过对被控对象的输出进行反馈,实现对输出进行调节,使其趋近于期望值。
与开环控制系统相比,闭环控制系统具有更高的精度和稳定性,能够对被控对象的实际输出进行监测和调整。
闭环控制系统的特点是反馈环节可以提高系统的鲁棒性,减小外部干扰的影响,但系统复杂度较高。
闭环控制系统的基本组成部分包括被控对象、传感器、控制器和执行器。
被控对象是需要被控制的物理系统,传感器用于测量被控对象的输出,控制器根据测量结果计算控制信号,执行器根据控制信号对被控对象进行控制。
5. 闭环增益闭环增益是指闭环控制系统中输出与输入之间的比例关系。
闭环增益不仅取决于开环增益,还取决于反馈环节对输入进行调节的能力。
闭环增益可以表示为输出与输入之间的比例关系,即输出与输入的比值。

工作研究—54—开环与闭环控制系统优缺点王继光 白昊飞(风神轮胎股份有限公司,河南 焦作 454003)引言:自动控制技术及其系统在今天社会中并不鲜见,小到可远程控制的智能家用电器、红绿灯,大到工业自动化生产线、飞机自动驾驶系统、导弹发射系统,都是自动控制技术及其系统的应用结果。
在自动控制系统中,不同功能和需求的被控制对象需要匹配不同的控制技术,开环和闭环控制是两种不同原理的控制方式,也是自动控制系统中最基本的两种控制技术。
1开环控制系统开环控制系统是指无信息反馈环节来影响当前控制的系统,信号的发出到结果产生是一条直线,无论结果如何对系统本身没有影响。
领域内用于具象化描述开环控制系统的经典案例为“投篮”,人体大脑发出“投篮”的信号,通过控制手臂、手腕、手指来控制篮球离手时的速度、方向和力量,然后篮球被投出,至此这个控制过程完成。
至于篮球最终有没有投中,并不会影响控制系统的活动。
开环控制系统运行流程图如图1所示。
图1 开环控制系统流程图 2闭环控制系统闭环控制系统是指有信息反馈环节来影响当前控制的系统,信号发出后系统会根据结果反馈的偏差进行调整,追求消除偏差来获得更优质、更符合预期的系统效果。
因此,闭环控制系统也称反馈控制系统,结果能够在一定程度上影响系统的运行。
领域内用于具象化描述闭环控制系统的经典案例为“驾驶”,将司机与汽车视作一个系统整体,司机的大脑输出控制信号,司机的双手、脚控制汽车的方向盘、信号系统、刹车油门系统,最终实现对汽车的控制,在汽车行驶过程中,司机需要通过视觉来不断矫正车辆行驶的方向、速度等参数,最终使汽车能够安全到达目的地。
汽车的被控制程度和结果对整个驾驶控制过程有很大的影响,司机的控制调整是参照系统控制结果来进行的。
闭环控制系统运行流程图如图2所示。
图2 闭环控制系统流程图3开环与闭环控制系统的区别从以上两点阐述中可知,开环控制系统是按照时序进行的控制系统,始终保持前进没有回头;而闭环控制系统有反馈、会调节,被控对象会始终被控制在一个相对稳定的范围内,被控对象所表现出的结果会在一定程度上影响控制系统运行、继而再一次影响结果,结果与预期之间有比较的过程。

第1章 绪论液压控制系统是以(静)液压控制与换能元件为主要控制元件构建的控制系统。
液压控制与换能元件通常指液压控制阀、控制用液压泵等。
液压控制技术是自动控制技术的一个重要分支。
液压控制系统特点鲜明,优势明显,发挥不可替代的作用。
液压控制技术是典型的机电液一体化技术,是多学科交叉融合发展的范例。
例如,电气液压控制系统以动力学系统为对象,以负反馈系统设计为手段,集成机械系统、电气系统和液压系统构建机电液一体化的动态系统。
目前,液压控制技术在装备制造业、汽车工业、航天航空、兵器工业、冶金工业、船舶工业、医疗工程等多领域获得应用。
本章将阐述如下问题:开环液压控制与闭环液压控制系统,液压控制系统的分类及特点,液压控制技术的发展历程与趋势,液压控制技术的应用。
1.1 开环液压控制与闭环液压控制与机电控制系统一样,液压控制系统也可以分为开环液压控制与闭环液压控制。
下面以机床运动平台控制为例探讨开环控制系统与闭环控制系统。
机床运动平台是常见的控制对象。
机床运动平台是机床的工作台体,它安装在床身的滑动导轨上。
不同类型机床对运动平台的性能要求不同,例如平面磨床的运动平台(工作台)仅要求实现平稳的水平往复运动,不需要精密控制其位移量。
数控加工中心或数控铣床的运动平台(工作台)作精密进给运动,则需要精确控制平台的运动位移量,否则影响工件加工质量。
为了便于清晰探讨实际液压开环控制与液压闭环控制的异同,以机床运动平台为被控对象,分别用电磁换向阀、电磁比例方向阀和电液伺服阀作为主要控制元件,建立机床运动平台的三种常见液压控制系统。
1.1.1 用电磁换向阀构建的液压控制系统普通平面磨床水平往复工作台可以采用如图1.1所示的液压控制方案。
因不需要精确控制运动位移,它采用电磁换向阀构建液压控制系统。
三位四通电磁换向阀作控制元件,采用行程开关或接近开关等作为指令元件,由继电器等构成逻辑运算网络,可以实现控制信号逻辑运算与功率放大,从而产生足够控制电流驱动电磁换向阀的电磁铁。

开环控制系统:不将控制的结果反馈回来影响当前控制的系统举例:打开灯的开关——按下开关后的一瞬间,控制活动已经结束,灯是否亮起以对按开关的这个活动没有影响;3、宾馆自动门控制系统控制量闭环控制系统:可以将控制的结果反馈回来与希望值比较,并根据它们的误差调整控制作用的系统输入量控制器执行器被控对象举例:调节水龙头——首先在头脑中对水流有一个期望的流量,水龙头打开后由眼睛观察现(人热辐射有的流量大小与期望值进行比较,并不断的用手进行调节形成一个反馈闭环控制;骑自行车——4、楼道自动声控灯装置同理不断的修正行进的方向与速度形成闭环控制控制量开环闭环的区别:1、有无反馈; 2 、是否对当前控制起作用。
开环控制一般是在瞬间就完成输入量控制器执行器被控对象的控制活动,闭环控制一定会持续一定的时间,可以借此判断。
手动控制系统:必须在人的直接干预下才能完成控制任务的系统自动控制系统:不需要有人干预就可按照期望规律或预定程序运行的控制系统5、游泳池定时注水控制系统控制量判断:骑自行车——人工闭环系统,导弹——自动闭环系统,人打开灯——人工开环系统,自动门、自动路灯——自动开环系统输入量控制器执行器被控对象开环控制系统方框图19 例开环控制系统的方框图:6、十字路口的红绿灯定时控制系统控制量控制量输入量控制器执行器被控对象输出量输入量控制器执行器被控对象1、水泵抽水控制系统控制量7、公园音乐喷泉自动控制系统控制量输入量控制器执行器被控对象输出量输入量控制器执行器被控对象2、家用窗帘自动控制系统控制量8、自动升旗控制系统控制量输入量控制器执行器被控对象输出量输入量控制器执行器被控对象输出量输出量输出量输出量输出量输出量9、宾馆火灾自动报警系统控制量输入量控制器执行器被控对象10、宾馆自动叫醒服务系统控制量输入量控制器执行器被控对象11、活动猴控制系统控制量输入量控制器执行器被控对象控制量12、公共汽车车门开关控制系统(压缩空输入量控制器执行器被控对象13、家用缝纫机缝纫速度控制系统控制量输入量控制器执行器被控对象输出量输出量输出量(猴的动作输出量(车门的输出量14、普通电风扇控制系统控制量输入量控制器执行器被控对象15、普通全自动洗衣机控制系统控制量输入量控制器执行器被控对象控制量16、手电筒控制装置输入量控制器执行器被控对象17、宾馆自动门加装压力传感器防意外事故自动控制系统控制量输入量控制器执行器被控对象(压力传感器是否测到18、可调光台灯控制系统控制量输入量控制器执行器被控对象输出量输出量输出量输出量输出量19、电吹风控制系统控制量输入量控制器执行器被控对象输出量2、供水水箱的水位自动控制系统比较器控制器给定量(机械或电闭环控制系统方框图12 例闭环控制系统的方框图:比较器控制量给定量被控量控制器执行器被控对象3、加热炉的温度自动控制系统检测装置比较器给定量控制器(电子或微1、投篮控制量比较器给定量控制器执行器被控对象被控量控制量执行器被控对象被控量检测装置控制量执行器被控对象被控量检测装置检测装置4、抽水马桶的自动控制系统比较器给定量控制器5、花房温度控制系统比较器给定量控制器6、夏天房间温度控制系统比较器给定量控制器控制量执行器被控对象检测装置控制量(制冷制执行器被控对象(加热或检测装置控制量执行器被控对象被控量被控量被控量7、家用电饭锅保温控制系统比较器给定量控制器8、家用电冰箱温度控制系统比较器给定量控制器控制量(加热被控量执行器被控对象(电饭锅温检测装置控制量被控执行器被控对象(冰箱检测装置检测装置(房内实9、宾馆使用多台热水器串联电辅助加热自动控制系统控制量比较器给定量控制器执行器被控对象被控量检测装置装置10、粮库温、湿度自动控制系统比较器给定量控制器(设定的11、自动电热水壶控制系统比较器给定量控制器控制量执行器被控对象被控量(降温除湿装置)(粮库内检测装置控制量执行器被控对象被控量检测装置。

矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。

开环控制和闭环控制的例子
1 开环控制
开环控制是一种应用数学、物理和控制理论的控制系统,以实现
设备、机械设备和一般过程的设计和控制,这就要求被控对象可以按
照系统预设的参数变化。
精确的控制是关键,关键因素是系统通过检
测被控对象状态而反馈给控制装置的参数的变化,使控制系统稳定可靠。
开环控制一般不需要反馈,可以通过控制系统的程序和参数来控
制被控对象。
常见的开环控制有恒压控制、恒流控制、燃油比控制等,常见的应用包括电路调速、投屏系统、机器人控制等,例如电路调速
应用,在控制电机的转速时,通过调整控制电路的频率就可以控制电
机的转速,这就是一种开环控制。
2 闭环控制
闭环控制是一种可以检测被控对象的状态,通过反馈给控制系统
的信号,再通过控制装置调整控制变量,促使系统达到所需的目标或
控制对象满足预期约束的控制系统。
相较于开环控制,闭环控制系统
可以拥有强大的精确控制能力,在工程中得到广泛的使用。
常见的闭环控制有PID控制、积分环节控制等,它们用于抗干涉,抗扰动及平稳性等特点,广泛应用在机器人控制、预订议件跟踪控制、温度控制、电动机调速等。
例如温度控制,精确控制温度是很重要的,
在采用PID控制的情况下,只要反馈给控制器的温度差值达到目标值,就可以实现温度的控制,这就是一种闭环控制。
总的来说,开环控制与闭环控制可以为控制系统提供高精度的控制,而开环控制仅仅需要外输入参数而不需要被控对象本身的反馈,
而闭环控制侧重于精确控制,系统会及时根据被控对象的参数变化而
调整系统参数,从而有效锁定系统的性能和目标性能。
实验三十四 温度控制系统的开环控制和闭环控制(自动控制理论—检测技术综合实验)一、 实验原理1.温度控制问题温度是一个极易受环境、负载变化而变化的物理量。
温度控制应用很广,从温室的温度、冶炼时的炉温、化工产品生产制造工艺过程对恒温的需要,到家用电器的温度控制(如电磁炉温度控制)、等等,都需保持温度为恒定值,或按照一定规律变化。
扰动导致的输出(温度)偏离希望值可以通过闭环控制得到抑制。
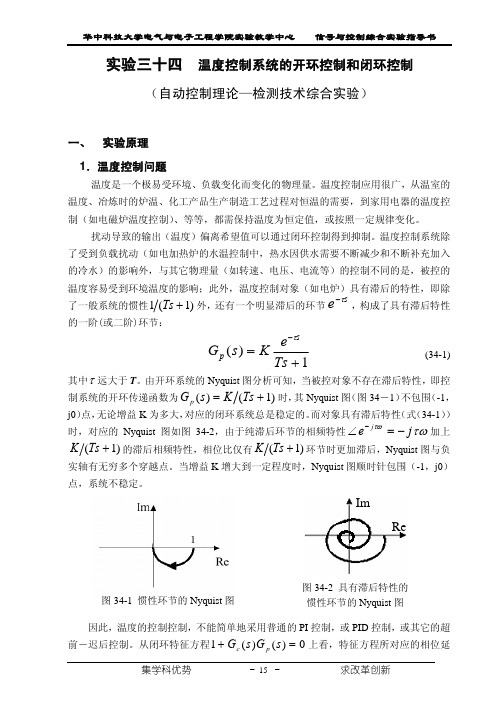
温度控制系统除了受到负载扰动(如电加热炉的水温控制中,热水因供水需要不断减少和不断补充加入的冷水)的影响外,与其它物理量(如转速、电压、电流等)的控制不同的是,被控的温度容易受到环境温度的影响;此外,温度控制对象(如电炉)具有滞后的特性,即除了一般系统的惯性)1(1+Ts 外,还有一个明显滞后的环节,构成了具有滞后特性的一阶(或二阶)环节:s e τ−1)(+=−Ts e K s G sp τ (34-1) 其中τ远大于T 。
由开环系统的Nyquist 图分析可知,当被控对象不存在滞后特性,即控制系统的开环传递函数为)1()(+=Ts K s G p 时,其Nyquist 图(图34-1)不包围(-1,j0)点,无论增益K 为多大,对应的闭环系统总是稳定的。
而对象具有滞后特性(式(34-1))时,对应的Nyquist 图如图34-2,由于纯滞后环节的相频特性加上τωτωj e j −=∠−)1(+Ts K 的滞后相频特性,相位比仅有)1(+Ts K 环节时更加滞后,Nyquist 图与负实轴有无穷多个穿越点。
当增益K 增大到一定程度时,Nyquist 图顺时针包围(-1,j0)点,系统不稳定。
图34-2 具有滞后特性的惯性环节的Nyquist 图Re Im 图34-1 惯性环节的Nyquist 图因此,温度的控制控制,不能简单地采用普通的PI 控制,或PID 控制,或其它的超前-迟后控制。
从闭环特征方程0)()(1=+s G s G p c 上看,特征方程所对应的相位延迟很大;而控制器(校正环节)的传递函数∏∏==−−=1111)()()(n i ic m j j c c c p s zs K s G (34-2) 中,校正环节中的PI 控制特性或校正网络极点仍具有迟后特性,会导致系统的不稳定性更严重;而其中的超前环节(零点)相对于滞后环节而言时间常数太短(电子元件构成的校正环节不可能产生足以补偿温度对象这样的纯滞后环节的时间常数),因此对系统存在的不稳定性无任何改善作用。
学 号:_________
Hefei University 控制理论与仿真I 综述报告
报告题目: 混合控制系统的分析 专业班级: 14自动化(2)班 学生姓名: 一页书生 教师姓名: 李老师 完成时间: 2016.12.10 混合控制系统的分析 中文摘要 自动控制理论是研究自动控制共同规律的技术科学。它的发展初期,是以开环与闭环理论为基础的自动调节原理,主要用于工业控制,二战期间为了设计和制造飞机及船用自动驾驶仪,火炮定位系统,雷达跟踪系统以及其他基于反馈原理的军用设备,进一步促进并完善了自动控制理论的发展。本文首先介绍了开环与闭环控制系统,然后分析了它们各自的优缺点并进行了比较,最后展示了一些在实际生活中应用实例。 关键词:自动控制;开环控制系统;闭环控制系统;优缺点 The analysis of the hybrid control system Chinese Abstract Automatic control theory is the study of automatic control common law science and technology Its early stage of development, is based on the theory of open loop and closed loop automatic regulating principle, mainly used in industrial control, during the second world war in order to design and manufacture of aircraft and Marine autopilot, artillery positioning system, radar tracking system and other military equipment based on feedback principle, to further promote and perfect the development of automatic control theory This article first introduces the open loop and closed loop control system, then analyzes their respective advantages and disadvantages and on the basis of the comparison, finally shows some practical examples Key words: automatic control; Open loop control system; A closed-loop control system; The advantages and disadvantages 目 录 一、前言 .......................................................... 1 二、开环与闭环控制系统 ............................................ 1 2.1开环与闭环控制系统的定义 .................................. 1 2.2开环与闭环控制系统的框图 .................................. 1 2.2.1开环控制系统框图 .................................... 1 2.2.2闭环控制系统框图 .................................... 1 2.3开环与闭环控制系统的传递函数 .............................. 2 三、开环闭环的区别与优缺点 ........................................ 2 3.1开环与闭环控制系统的区别 .................................. 2 3.2开环与闭环控制系统的优缺点分析 ............................ 3 3.3开环与闭环控制系统的优缺点 ................................ 3 3.4开环与闭环控制系统的优缺点比较 ............................ 3 四、生活中常见的开闭环控制系统实例 ................................ 4 4.1实例分析 .................................................. 4 4.2在生活中应用 .............................................. 5 五、总结: ......................................................... 6 参考文献 .......................................................... 7 1
一、前言 目前,自动控制技术几乎渗透到国民经济的各个应用领域及社会生活的各个方面,如在工农业生产、交通运输、航空航天、家用电器等许多领域获得了越来越广泛的应用。为了实现各种复杂的控制任务,首先要将被控制对象和控制装置按照一定的方式连接起来,组成一个有机的总体,这就是自动控制系统。在自动控制系统中,被控对象的输出量即被控量是要求严格加以控制的物理量,它可以要求保持为某一恒定值,例如温度、流量、液位、或压力等;而控制装置则是对被控对象施加控制作用的机构的总体,它可以采用不同的原理和方式对被控对象进行控制,但最基本的一种是基于开、闭环控制的自动控制技术。在此基础的研究中,我们必须注重开环与闭环控制系统的优势以及劣势,进而针对性地进行科学研究。
二、开环与闭环控制系统
2.1开环与闭环控制系统的定义 开环控制系统:系统的输出量对系统的控制作用不产生任何影响,即系统的输出端与输入端之间不存在反馈,这种系统称开环控制系统。
闭环控制系统:是把输出量直接或间接地反馈到输入端构成闭环,实现自动控制的系统称为闭环控制系统。由于系统是根据负反馈原理按照偏差进行控制的,即通过比较系统行为(输出)与期望行为之间的偏差,并消除偏差以获得预期的系统性能,因此也叫反馈控制系统或偏差控制系统。
2.2开环与闭环控制系统的框图 2.2.1开环控制系统框图
2.2.2闭环控制系统框图 2
2.3开环与闭环控制系统的传递函数 所谓传递函数,只是反馈信号的数学公式/模型。传递函数零初始条件下线性系统响应(即输出)量的拉普拉斯变换(或z变换)与激励(即输入)量的拉普拉斯变换之比。记作G(s)=Y(s)/U(s),其中Y(s)、U(s)分别为输出量和输入量的拉普拉斯变换。传递函数是描述线性系统动态特性的基本数学工具之一,经典控制理论的主要研究方法——频率响应法和根轨迹法——都是建立在传递函数的基础之上。而在经典控制理论中传递函数有两个重要且易混淆的内容即:
Gk(s)=G(s)•H(s) 开环传递函数 Gk(s)=G(s)/1+G(s)•H(s) 闭环传递函数 开环传函其实是闭环传函的一部分。开环和闭环的本质区别是:闭环控制系统的被控量要反馈回到给定信号端,与给定信号进行比较(一般为负反馈),而开环没有这一环节。
另外,还有半闭环控制系统,之所以叫半闭环是因为反馈回到给定输入信号的反馈量不是直接取自被控量,而是间接取到的。
三、开环闭环的区别与优缺点
3.1开环与闭环控制系统的区别 开环控制系统不能检测误差,也不能校正误差。控制精度和抑制干扰的性能都比较差,而且对系统参数的变动很敏感。合闭环控制系统不管出于什么原因(外部扰动或系统内部变化),只要被控制量偏离规定值,就会产生相应的控制作用去消除偏差。控制精度和抑制干扰的性能都比较差,而且对系统参数的变动很敏感。因此,一般仅用于可以不考虑外界影响,或惯性小,或精度要求不高的一些场合。
开环系统没有检测设备,组成简单,但选用的元器件要严格保证质 3
量要求。闭环系统具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性。
开环控制系统的稳定性比较容易解决。闭环系统中反馈回路的引入增加了系统的复杂性。
3.2开环与闭环控制系统的优缺点分析 由开环闭环控制系统框图可以看出,开环控制系统是比较简单的单回路控制方式,信息从输入端到输出端,仅有一条路径,本身不能对被控量的偏差进行调整和补偿,没有自动纠正的能力,控制精确度相对比较低,可以节省开支,容易实现、适用于较稳定的场合;闭环比开环控制系统多了一个反馈,有适当的检测装置把系统的输出量返回到输入端的过程。这样一来,既存在由输入到输出的信号前向通路,也包含从输出端到输入端的信号反馈通路,信息流经的路径有两条,构成一个闭合环路,不论何种原因都会产生控制作用来减少偏差,但设计麻烦,结构复杂,成本高,用于高精度和高可靠性的场合。例如在现实中大炮发射,是开环控制系统,因为开炮前瞄准控制,炮弹一旦出了膛就不再管了;而导弹发射,是闭环控制系统,因为导弹控制系统会根据对目标的偏差纠正偏差以力争命中目标。
3.3开环与闭环控制系统的优缺点
开环控制系统的优点是结构简单,比较经济。缺点是无法消除干扰所带来的误差。
同开环控制系统相比,闭环控制具有一系列优点。在反馈控制系统中,不管出于什么原因(外部扰动或系统内部变化),只要被控制量偏离规定值,就会产生相应的控制作用去消除偏差。因此,它具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性。但反馈回路的引入增加了系统的复杂性,而且增益选择不当时会引起系统的不稳定。为提高控制精度,在扰动变量可以测量时,也常同时采用按扰动的控制(即前馈控制)作为反馈控制的补充而构成复合控制系统。
3.4开环与闭环控制系统的优缺点比较
主要从三方面比较: ①工作原理:开环控制系统不能检测误差,也不能校正误差。控制精度和抑制干扰的性能都比较差,而且对系统参数的变动很敏感。因此,