文章编号:1671-3559(2006)02-0172-04
收稿日期:2005-10-01基金项目:国家自然科学基金(50575094)作者简介:王均刚(1978-),男,山东淄博人,硕士生;马汝建
(1956-),男,山东章丘人,教授,博士,硕士生导师。
TMD 振动控制结构的发展及应用
王均刚,马汝建,赵 东,林近山
(济南大学机械工程学院,山东济南250022)
摘 要:对TMD 结构的振动原理进行了阐述,总结了TMD 发展的3个阶段,并且对每个阶段主要研究的问题及取得成果作了概述,简要介绍了TMD 在国内外的工程应用实例,最后指出了TMD 系统在海洋平台应用中近期的发展趋势及其需要解决的主要问题。
关键词:振动控制;调谐质量阻尼器;结构中图分类号:TB53
文献标识码:A
近年来,结构控制的理论与实践应用得到了飞速发展,调谐质量阻尼器(tuned mass damper ,TMD )作为被动控制技术之一,在生产实践中不断地得到应用[1]
。调谐质量阻尼器是最常用的一种被动控制
系统,它是在结构物顶部或上部某位置上加上惯性质量,并配以弹簧和阻尼器与主体结构相连。TMD 作为一种被动控制方式,因其构造简单,易于安装,维护方便,经济实用,并且不需外力作用,有着其他方式无法比拟的优点,因此在高层建筑风振控制、桥梁及海洋平台振动控制等领域得到重视。
1 TMD 吸振原理
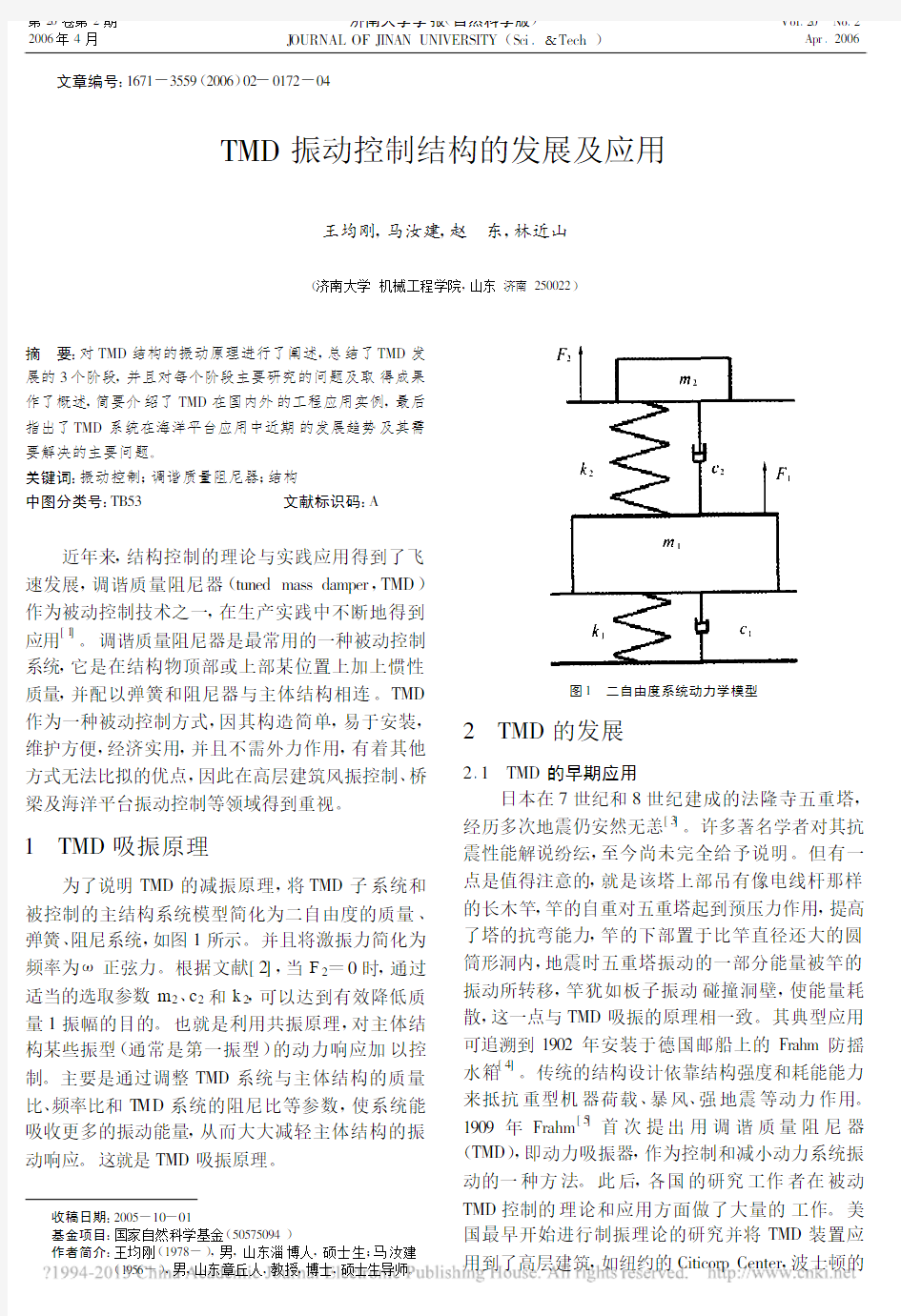
为了说明TMD 的减振原理,将TMD 子系统和被控制的主结构系统模型简化为二自由度的质量、弹簧、阻尼系统,如图1所示。并且将激振力简化为频率为ω正弦力。根据文献[2],当F 2=0时,通过适当的选取参数m 2、c 2和k 2,可以达到有效降低质量1振幅的目的。也就是利用共振原理,对主体结构某些振型(通常是第一振型)的动力响应加以控制。主要是通过调整TMD 系统与主体结构的质量比、频率比和T MD 系统的阻尼比等参数,使系统能吸收更多的振动能量,从而大大减轻主体结构的振动响应。这就是TMD 吸振原理。
图1 二自由度系统动力学模型
2 TMD 的发展
2.1 TMD 的早期应用
日本在7世纪和8世纪建成的法隆寺五重塔,经历多次地震仍安然无恙[3]。许多著名学者对其抗震性能解说纷纭,至今尚未完全给予说明。但有一点是值得注意的,就是该塔上部吊有像电线杆那样的长木竿,竿的自重对五重塔起到预压力作用,提高了塔的抗弯能力,竿的下部置于比竿直径还大的圆筒形洞内,地震时五重塔振动的一部分能量被竿的振动所转移,竿犹如板子振动碰撞洞壁,使能量耗散,这一点与TMD 吸振的原理相一致。其典型应用可追溯到1902年安装于德国邮船上的Frahm 防摇水箱[4]
。传统的结构设计依靠结构强度和耗能能力来抵抗重型机器荷载、暴风、强地震等动力作用。1909年Frahm [5]首次提出用调谐质量阻尼器(TMD ),即动力吸振器,作为控制和减小动力系统振动的一种方法。此后,各国的研究工作者在被动TMD 控制的理论和应用方面做了大量的工作。美国最早开始进行制振理论的研究并将TMD 装置应用到了高层建筑,如纽约的Citicorp Center ,波士顿的
第20卷第2期2006年4月
济南大学学报(自然科学版)
J OURNAL OF JINAN UNIVERSITY (Sci .&Tech .)
Vol .20 No .2
Apr .2006
DOI :10.13349/j .cn ki .jd xb n .2006.02.021
John Hancock Building,获得了令人满意的效果[6]。
2.2 T MD的演化
TMD的演化可以分为3个阶段。第1个阶段主要对单个TMD系统的研究,多集中于对结构控制效果和最优控制参数的理论研究。为使T MD的控制效果达到最佳,即扩大其能量耗散能力,最重要的是把TMD的振动频率调至结构振动频率附近并选用适当的阻尼。自Den Hartong[7]出一种无阻尼系统TMD优化参数原则以来,许多研究者对不同结构激励形式下的TMD参数优化问题做过研究,并对其在不同激励方式下的减振有效性获得认可。文献[8]通过对TMD的参数对主结构振动的影响分析,可以看出它对参数的影响呈现非线性特点,通过在桥梁上安装TMD的实例表明,它是一种很有效的减振方法。但同时发现它的应用适合于:(1)主结构阻尼较小(阻尼比<5%);(2)更适合于已有结构的被动控制。文献[9]研究了被动的TMD系统对高耸结构电视塔的风振控制效果和影响控制效果的参数,研究表明它对结构风振的最佳效果可达50%,并且用实例进行验证,被动TMD系统对高耸的风振控制有明显的效果。T MD参数对控制效果也有较大的影响,针对参数优化理论存在的两个问题:(1)结构响应实际上可以是变形、速度或加速度,而激励也可以是地震作用或风荷载等不同激励,结构不同部位在不同激励下的不同响应使得结构响应不应当是一个单一目标函数,而应当包含多个目标函数;(2)基于参数最优值进行TMD系统设计时,设计者通过计算得到的最优调谐比和最优阻尼比事实上很难准确实现,实际工程中所实现的阻尼比和调谐比与最优值总是有误差的,而这样的误差所导致目标函数的优化损失,设计者也无从把握。为解决这两个问题,文献[10]提出了TMD参数有效域的概念,采用此法进行设计可以有效解决上述两方面的问题,使得系统设计的可靠性大大提高。但TMD的减振也存在着缺点,即它的有效性对结构自振频率的波动很敏感,由于误调或偏离最优点,其有效性会很快下降。研究表明[11-12],当结构所受的外激振力频带非常窄时TMD的减振效果很好,当外激振力频带较宽时,减振效果明显降低。因此,TMD用于结构振动控制时其有效频带较窄、控制效果不稳定、可实现性较差。
第2个阶段是对多重调谐质量阻尼器(multiple tuned mass da mpers,MT MD)的研究。主要对MTMD 结构刚度和质量摄动的鲁棒性研究即讨论结构频率变化对MTMD控制有效性的影响问题,从而为设计提供一些有益的参考。1988年,Clark[13]提出了MT-MD的新思想及优化方法。为改善TMD的缺点,Xu 和Igusa[14]提出了具有多个不同动力特性组成且频率呈线性分布的MT MD新思想。此后,众多学者致力这方面的研究。文献[15]分析了其对顶部带有结构附属物的结构的控制效果。并且与TMD的控制效果加以比较验证。算例说明多模态控制对结构的相对位移和绝对加速度均有较好的控制效果,并且优于TMD控制效果。文献[16]对有多个调频质量阻尼器的建筑结构在简谐地震作用下的特性进行研究,并将其与TMD进行比较。分析可得,在已知质量系数的前提下,系统中的频率范围、阻尼系数和TMD的个数是系统的主要参数,它们对建筑结构的响应起主要作用,而且这些参数存在优化问题。优化MTMD对建筑结构的振动控制要比优化TMD更为有效。文献[17]采用频域分析法推导了具有MT-MD的多自由度结构受控振型广义坐标的频率响应方程,然后进行参数分析和设计,理论研究与计算结果表明只要设计正确,它就可以有效地减小结构在地震作用下的动力响应,同时具有造价低廉、维护简易的特点。
第3个阶段是关于TMD概念的扩展。目前这方面的研究尚处在起步阶段,研究成果比较少。Pallazzo和Petti[18]在1994年提出了将基底隔震结构和TMD系统合二为一减小基频响应的新设想。分析表明将TMD系统应用于基底隔震结构可以更有效地吸收地震能量,基底相对位移显著降低。文献[19]指出,可用结构顶层代替TMD系统的质量块,这是一个具有实用意义的设计思想。文献[20]基于TMD的原理,进行了一种新型减震结构系统的试验研究。这种结构的主结构与顶层楼体间通过叠层橡胶支座连接,形成一个大型的悬浮顶层TMD系统。研究表明:这种新型的减震结构系统对吸震体进行适当的参数选择,在不同地震波作用下,主结构顶层加速度响应减少1/4以上。该体系减震效果好、工艺简捷,对于工程抗震有较好的实用价值。文献[21]提出了利用结构内部质量体作为减振质量的扩展质量调谐阻尼器(extended tuned mass da mper,ET-MD)的振动控制新概念,此概念克服了T MD系统需要增加额外质量的不足,减轻了系统承载负担,其优点是调谐质量与平台的剩余质量之比可达200%以上,是普通TMD系统的40倍,因此减振效果更好。
173
第2期 王均刚,等:T M D振动控制结构的发展及应用
3 TMD的工程应用
TMD在土木工程中有着较早的应用历史。前苏联于20世纪50年代初就在钢电视塔及烟囱上安装了撞击式摆锤,使得风荷载作用下的振动得到较大的衰减。20世纪70年代,美国波士顿60层的John Hancock大楼和纽约274m高的世界贸易中心大楼也分别安装了数百吨重的TMD装置,有效地控制了结构的风振响应。1980年,澳大利亚的悉尼电视塔也成功安装了TMD风振控制装置。在日本, 1980年第一个TMD安装于Chiba Port塔上,随后,大阪Funade桥的桥塔也安装了TMD[22]。在澳大利亚的悉尼电视塔上安装了两个TMD来减小电视塔的第一、二振型风振反应,特别应该指出的是用于控制第一振型反应的TMD是悬吊在塔楼顶部重达180t 的水箱,这是第一个用水箱来代替质量块的尝试。世界上最长的悬索桥Akshi-Kaikyo桥也采用TMD 来控制其300m高主桥塔的风振响应[23]。在我国,瞿伟廉教授对U型水箱进行了系统的研究,并将其应用到厦门九洲大厦和上海气象塔的抗风设计中,这是我国结构风振控理论应用于实际工程的第一例[24]。顾明、陈人、项海帆等人对杨浦大桥的抖动问题进行了研究,设计了分别对应不同质量比的7种MT MD系统。根据需要的控制效率和许可的预算,可任意选取一组用于对杨浦大桥的抖振控制[25]。九江长江大桥应用新型TMD抑制吊杆涡振,成功的抑制了吊杆的涡激振动[26]。楼梦麟、吴和霖和马恒春研制了一种利用电磁涡流耗能的TMD新装置,试验研究表明该装置有良好的阻尼特性,并且通过钢框架的振动台试验,研究这一装置减小结构地震反应的控制性能,以验证所设计的电磁耗能装置的有效性和合理性,为其在实际工程中应用提供了必要的实验依据[27]。另外TMD被动控制与主动控制相结合形成的混合控制也在工程中得到了应用。日本东京大学Fujita T最先进行了主被动切换混合T MD控制的试验研究[28],随后在130m高的日本长期信用银行大厦上安装了第1个主被动切换混合TMD(质量为195t),取得了非常好的控制效果[29];其后的日本学者Hora H,Watakabe M分别在日纪横滨大厦和奥迪斯电梯大厦上安装了主被动切换TMD[30],并实测了在台风作用下的控制效果。深圳市罗湖区地王大厦建筑高度324.95m,任军、滕军、叶列平对地王大厦风振TMD主被动切换混合控制进行了研究[31]。4 结论及展望
TMD理论在高耸结构风振控制及桥梁振动控制方面取得许多成果,并且在实际工程得到有效应用。合理选取质量、刚度系数、阻尼比及在被控结构上的位置是成功使用TMD系统的关键。海洋平台作为海上油汽资源开发的必备设备,其振动控制备受关注。基于TMD在高层建筑物的应用经验及其优越性,对海洋平台振动控制是一种优选方案。特别是最近出现的E TMD振动控制系统,由于克服了TMD系统需要增加额外质量的不足,减轻了系统承载负担,其优点是调谐质量与平台的剩余质量之比可达200%以上,是普通系统的40倍,因此减振效果更好。该系统的深入研究与应用,将是近期海洋平台振动控制研究与应用的重要方面。
参考文献:
[1] R ohmam A.Opimal control of tall buildings by appendages[J].Struct
Engrg A SCE,1984,10(5):937-947.
[2] 李 吉.阻尼吸振器原理在惯性振动机噪声控制中的应用[J].
机械科学与技术,2002,21(1):116-118.
[3] 王松涛.现代抗震设计方法[M].北京:机械工业出版社,1997.
[4] 叶继红,陈月明,沈世钊.减震系统在网壳结构中的应用[J].哈
尔滨建筑大学学报,2000,23(5):10-13.
[5] R ahul R ana,Soon T T.Parametric study and si mplified design of tuned
mass da mpers[J].Engineering Structures,1998,20(3):193-204. [6] 胡晓锋,胡世德.最小均方位移条件下的TMD参数设计[J].结
构工程师,1999,35(2):32-35.
[7] Den Hart g J P.Mechanical Vibrations[M].Ne w York:Dover,1984.
[8] 同长虹,张雷涛.TMD吸振原理及其参数优化[J].甘肃高师学
报,2004,9(5):36-39.
[9] 葛晓明,范存心.TMD参数对高耸结构风振控制的影响[J].世
界地震工程,2001,17(4):123-127.
[10] 房 良,蓝宗建,周 伟.TMD系统参数有效域的研究[J].工
业建筑,2004,34(1):10-12.
[11] 刘保东,朱日希.MT M D系统抗震控制研究[J].工程力学,
2003,20(1):127-130.
[12] 李 黎,黄尚斌,张 卉.结构振动控制中MTMD的基本特性
研究[J].工程力学,2000,17(2):90-95.
[13] Clark A J.Multipl e pass ive tuned mass damper for reducing earth-
quake induced building motion[C].Pro9th World Conf on Earth-
quake Engrg,1988:283-290.
[14] Xu K and lgus a T.Dynamic Characteristics of multiple s ubstructures
with closely spaced frequencies[J].Earthquake Engineering and
Structural D ynamics,1992,21:1059-1070.
[15] 涂文戈,邹银生.MTMD对建筑结构多模态控制的减震分析
[J].地震工程与工程振动,2003,23(5):174-179.
[16] 蔡国平,孙 峰.MTMD控制结构地震反应的特性研究[J].工
程力学,2000,17(3):55-59.
174
济南大学学报(自然科学版) 第20卷
[17] 余钱华,胡世德,范立础.被动控制装置M TMD在桥梁结构中
的理论与应用研究[J].西安公路交通大学学报,2001,21(1): 51-54.
[18] Pallazz o B,Petto L.Seis mic response control in base is ol ated s ys tem
using tuned mass ed dampers[J].Struct Control,1994(4):135-143.
[19] Liu zaihua,zhangling,meng hui.Seis mic response of buil ding with an
absorbing bondary at top[C].Nagoya:Proceeding of5th Inter national
Colloguium on s tability and Ductility of Steel Structure,1997:1115-
1122.
[20] 张耀庭,刘再华.新型调谐质量阻尼器(T M D)的实用性与可行
性研究[J].岩土工程学报,1998,20(6):57-61.
[21] 马汝建,赵 东,王威强,等.ETMD在振动控制中的应用[J].
济南大学学报(自然科学版),2005,19(1):89.
[22] Ou J inping,Wo Bo.Recent Advances in Res earch on and Application
of Pas sive Energy Dis sipation Sys tems[J].Earthquake Engineering
and Engeering Vibration,1996,16(3):123-125.
[23] Kos himura K.Vibration control:of the main towers of the Akasi kaikyo
Bridge[J].Struct Control,1994,2:98-106.
[24] 瞿伟廉.高层建筑和高耸结构的风振控制设计[M].武汉:武
汉测绘科技大学出版社,1991.
[25] 顾 明,陈 人,项海帆.用于杨浦大桥抖振控制的MT M D研
究[J].振动工程学报,1998,11(1):1-8.
[26] 顾金钧,赵煜澄,邵克华.九江长江大桥应用新型T MD抑制吊
杆涡振[J].土木工程学报,1994,27(3):3-13.
[27] 楼梦麟,吴和霖,马恒春,等.电磁耗能T MD结构减震效率的
振动台试验研究[J].地震工程与工程振动,2003,23(4):158-
164.
[28] Fujita T,Miz uta M,Mats umoto K,et https://www.doczj.com/doc/dd11546538.html,rge-scale model experi-
ment of a hybrid mass damper with converti ble active and pass ive
modes for vibration control of tall buil ding[J].Transacti on of the
Japan Society of M echanical Engineering,1993,59(557):36-43.[29] Fujita T,M iz uta M,Matsumoto K,et al.Imple mentation of hybrid mass
damper with convertible active and pass ive modes using multistage
rubber bearing and hydraulic actuzator of vibration control of tall
buil ding[J].Transaction of the Japan Society of Mechanical Engineer-
ing,1994,60(580):4107-4115.
[30] Hora H,Omita T,M i yano H,et al.Application of Hybrid M ass
Damper with Converti ble Active and Pas sive Mode Using A C-Ser-
vomotor to Tall Buikding[C].Second Worl d Conference on Structural
Control,1998:1283-1292.
[31] 任 军,滕 军,叶列平.地王大厦风振T MD主被动切换混合
控制研究[J].地震工程与工程振动,2003,23(6):187-193.
Development and Application
of TMD Structural
Vibration Control
WANG Jun-gang,MA Ru-jian,ZHAO Dong,LIN Jin-sh an
(School of Mechanical Engineering,Jinan Univers ity,J inan250022,China)
Abstract:The theory of structure vibration control is expatiat-ed.It is su mmarized that the development of TMD system has three stages where the main problems and attaining accomplishment were reviewed.The practical applications of TMD in domestic and over-seas engineering are briefly introduced.Finally the development trend of TMD s ystem and the problems to be solved in the applica-tion are pointed out.
Key words:vibration control;tuned mass damper;structure; ETMD;MTMD
175
第2期 王均刚,等:T M D振动控制结构的发展及应用
《结构振动控制》教学大纲 课程编号:1322009 英文名称:Control of Structural Vibration 课程类别:选修课学时:36 学分:2 适用专业:土木工程 预修课程:结构动力学、控制理论、随机振动 课程内容: 内容:主要介绍结构振动控制机理,各种减振控制装置,控制律设计中的重要问题以及智能控制。 预期目标:使学生掌握结构控制的原理,能针对不同的要求对结构采用不同的控制策略,提高学生解决实际问题的能力。 重点和难点:被动阻尼器的工作原理及实用设计方法;TMD的工作原理和设计方法;各种主动控制算法的计算步骤、优缺点和使用条件;结构振动的模糊控制和神经网络控制;结构振动控制设计中的模型降阶,溢出,传感器与作动器的定位,鲁棒性,时滞效应;结构半主动控制系统的原理和半主动控制算法;结构振动控制的Benchmark问题。 教材: 欧进萍.结构振动控制-主动、半主动和智能控制.科学出版社 参考书目: 1. 瞿伟廉 .高层建筑和高耸结构的风振控制设计.武汉测绘科技大学出版社 2. 顾仲权.振动主动控制.国防工业出版社 3. 吴波.李惠.建筑结构被动控制的理论与应用.哈尔滨工业大学出版社 4. T.T.Soong.Active Structural Control: Theory and Practice. Longman Scientific & Technical. 5. G.W.Housner.Structural Control: past, present and future.et al. ASCE Journal of Engineering Mechanics, 123(9): 897-971, 1997 考核方式与要求: 课程论文。
振动控制措施(2021新版) Security technology is an industry that uses security technology to provide security services to society. Systematic design, service and management. ( 安全管理 ) 单位:______________________ 姓名:______________________ 日期:______________________ 编号:AQ-SN-0723
振动控制措施(2021新版) 振动是指物体在外力作用下,以中心位置为基准呈往复振荡的现象。 生产过程中的生产设备、工具产生的振动称为生产性振动。 振动的控制措施: (1)从工艺和技术上消除或减少振动源,是预防振动危害最根本的措施。如用油压机或水压机代替气(汽)锤,用水爆清沙或电液清沙代替风铲清沙、以电焊代替铆接等。 (2)选用动平衡性能好、振动小、噪声低的设备。在设备上设置动平衡装置,安装减振支架、减振手柄、减振垫层、阻尼层;减轻手持振动工具的质量等。 (3)基础隔振。将振动设备的基础与基础支撑之间用减振材料(橡胶、软木、泡沫乳胶、矿渣相等)、减振器(金属弹簧、橡胶减
振器和减振垫等)隔振,减少振源的振动输出。 在振源设备周围地层中设置隔振沟、板桩墙等隔振层,切断振波向外传播的途径。 (4)个体防护。穿戴防振手套、防振鞋等个人防护用品,降低振动危害程度。其中最重要的是防止手指受冷。 XXX图文设计 本文档文字均可以自由修改
现代工业控制总线的发展趋势 前言 随着计算机、通信、自动控制、微电子等技术的发展,大量智能控制芯片和智能传感器的不断出现,以及在传感器、通信和计算机领域所取得的巨大成就使人们对系统综合性能尤其是安全性能提出了越来越高的要求:希望能对系统设备的工作状况进行实时监测和控制,并在此基础上实现设备的智能维护。对企业自动化设备而言,对其工作状况进行远程监测和控制,不仅可方便设备管理者随时了解设备工作状态,设备出现异常时主动报警,便于及时维修,还可拓宽设备服务范围,提高工作性能,延长使用寿命。这一目标的实现对控制网络在开放性、互连性、分散性等方面提出了更高要求。 一分散控制系统(DCS) 当前工业控制计算机的应用范围仍以大系统、分散对象、连续生产过程(如冶金、石化、电力)为主,采用分布式系统结构的分散控制系统仍在发展。由于开放结构和集成技术的发展,进一步扩展了大型分散控制系统的应用。 1. 应用现状 DCS自1975年问世以来,大约有3次比较大的变革,70年代操作站的硬件、操作系统、监视软件都是专用的,由各DCS厂家自己开发并没有动态流程图,通信网络基本上是轮询方式;80年代通信网络较多使用令牌方式;90年代操作站出现了通用系统,90年代末通信网络有的部分遵循TCP/IP协议,有的开始采用以太网。20多年来,DCS已广泛应用于各工业领域并趋于成熟,成为工业控制系统的主流。 虽以现场总线为基础的FCS发展很快,最终将取代传统DCS,但其发展仍面临一些问题,如统一标准、仪表智能化等。而传统控制系统的维护和改造还需DCS,因此FCS完全取代传统DCS尚有较长过程。现DCS的新产品的特点为:系统开放、管控一体化及带有先进控制软件,DCS生产厂家也从事FCS的研发、生产和推广应用。
工业控制系统的网络化发展及现状研究 发布: 2009-10-26 | 作者: | 来源: 0引言 随着计算机技术、通信技术和控制技术的发展,传统的控制领域正经历着一场前所未有的变革,开始向网络化方向发展。控制系统的结构从最初的CCS(计算机集中控制系统),到第二代的DCS(分散控制系统),发展到现在流行的FCS(现场总线控制系统)[1]。对诸如图像、语音信号等大数据量、高速率传输的要求,又催生了当前在商业领域风靡的以太网与控制网络的结合。这股工业控制系统网络化浪潮又将诸如嵌入式技术、多标准工业控制网络互联、无线技术等多种当今流行技术融合进来,从而拓展了工业控制领域的发展空间,带来新的发展机遇。 1计算机控制系统的发展 计算机及网络技术与控制系统的发展有着紧密的联系。最早在50年代中后期,计算机就已经被应用到控制系统中。60年代初,出现了由计算机完全替代模拟控制的控制系统,被称为直接数字控制(DirectDigitalControl,DDC)。70年代中期,随着微处理器的出现,计算机控制系统进入一个新的快速发展的时期,1975年世界上第一套以微处理为基础的分散式计算机控制系统问世,它以多台微处理器共同分散控制,并通过数据通信网络实现集中管理,被称为集散控制系统(DistributedControlSystem,DCS)。 进入80年代以后,人们利用微处理器和一些外围电路构成了数字式仪表以取代模拟仪表,这种DDC的控制方式提高了系统的控制精度和控制的灵活性,而且在多回路的巡回采样及控制中具有传统模拟仪表无法比拟的性能价格比。 80年代中后期,随着工业系统的日益复杂,控制回路的进一步增多,单一的DDC 控制系统已经不能满足现场的生产控制要求和生产工作的管理要求,同时中小型计算机和微机的性能价格比有了很大提高。于是,由中小型计算机和微机共同作用的分层控制系统得到大量应用。 进入90年代以后,由于计算机网络技术的迅猛发展,使得DCS系统得到进一步发展,提高了系统的可靠性和可维护性,在今天的工业控制领域DCS仍然占据着主导地位,但是DCS不具备开放性,布线复杂,费用较高,不同厂家产品的集成存在很大困难。
硕士研究生 非笔试课程考核报告 (以论文或调研报告等形式考核用) 2013 至 2014 学年 第 1 学期 考核课程: 防灾减灾学 提交日期: 2013 年 12月 20 日 姓 名 程伟伟 学 号 2012010305 年 级 研二 专 业 防灾减灾及防护工程 所在学院 土木工程学院 山东建筑大学研究生处制 考核成绩 考核人
结构振动的主动控制技术 程伟伟 (山东建筑大学土木工程学院,济南,250101) 摘要:主动控制是一项积极主动的智能化措施,是根据外界刺激和结构响应预估计所需的控制力,从而输入能量驱使作动器施加控制力或调节控制器性能参数,达到减震效果。对目前的主动控制技术的研究现状作了简要评述,阐述了振动主动控制中主要控制方法和策略及应用中存在的问题,并提出了振动主动控制技术的发展趋势。 Abstraction:Active Control is an intelligent proactive measures, are needed to control the pre-estimate based on external stimuli and response structures, thereby driving the input energy is applied to the actuator control or regulate the controller performance parameters to achieve the damping effect. The current research status of active control techniques are briefly reviewed, elaborated mainly active vibration control and application control methods and strategies for the problems and proposed active vibration control technology trends. 关键词:主动控制作动器与传感器控制方法 引言:主动控制是指在振动控制过程中,经过实时计算,进而驱动作动器对控制目标施加一定的影响,达到抑制或消除振动的目的。其控制效果好,适应性强,正越来越受到人们的重视。近几年,随着科学技术的发展,特别是在计算机技术和测控技术的推动下,振动主动控制有了长足进步。主动控制在越来越多的实际工程中应用的越来越多。 正文 地震给世界各国人民造成了巨大的灾害,土木工程结构振动控制是工程结构抗震领域的新课题。姚治平将振动控制与土木工程相结合,首次提出了土木工程结构振动控制的概念。对有效减轻地震灾害有着重要的现实意义。主动控制在声学中并不是一个新概念,早在20世纪30年代,Paul Lueg 就提出了利用主动噪声抵消发代替被动噪声控制,对低频噪声进行控制。由于振动传递远比声音的传递复杂得多,致使主动振动控制的研究共走进展相对较慢,直到二次世界大战后的军备竞赛才促使其迅速发展。纵观主动振动控制的发展过程,将其划分为重点突破、广泛探索和重点攻关三个阶段。从20世纪50年年代起,主动控制取得了三项突破,即实现了机翼颤振的主动阻尼没提高了飞机航速;主动振动控制提供了超静环境,保证惯导系统满足核潜艇和洲际导弹导航的进度要求;磁浮轴承控制离心机转子成功,创造出分离铀同位素的新工艺。20世纪50-60年代主动振动控制发展的重点突破阶段。上述成就迅速吸引了众多的专家研究这项技术。于是20世纪70年代变成为空广泛探索主动振动控制在各个工程领域应用的阶段。进入20世纪80年代,主动振动技术在几个工程领域的应用前景相当明朗,其中就有控制高挠性土木工程结构振动在、控制,于是,主动振动控制研究进入重点攻关阶段。目前,对主动控制的研究主要集中在:传感器、致动器、动力学建模及其振动控制、传感器/致动器的优化配置等几方面。控制技术分为主动、被动和半主动等类型。主动控制是指在振动控制过程中,根据所检测的振动信号,应用一定的控制策略,经过计算,进而驱动作动器为控制目标施加一定的影响,达到抑制或消除振动的目的。其控制效果好,适应性强,正越来越受到人们的重视。本文主要介绍主动控制技术的发展和展望。 主动控制是一种需要额外能量的控制技术,它与被动控制的根本区别是有无额外能量的消耗,是否具有完整的反馈控制回路。与被动控制相比,主动控制技术复杂、造价昂贵、维护要求高,但对于高层建筑或抗震设防要求高的建筑来说,主动控制具有更好的控制效果。主动控制装置大体上由仪器测量系统(传感器)、控制系统(控制器)、动力驱动系统(作动器)等组成。传感器测量姐欧股的动力响应或外部激励信息;控制器处理传感器测量的信息,实现所需的空置力,并输出作动器
《工业控制网络》复习题 一、概念题 1、现场总线:安装在制造或过程区域的现场装置与控制室内的自动控制装置之间的数字式、串行、多点通信的数据总线称为现场总线。 2、模拟数据编码:分别用模拟信号的不同幅度、不同频率、不同相位来表达数据的0、1状态的,称为模拟数据编码。 3、数字数据编码:用高低电平的矩形脉冲信号来表达数据的0、1状态的,称为数字数据编码。 4、单极性码:信号电平是单极性的数字数据编码。 5、双极性编码:信号电平为正、负两种极性的数字数据编码。 6、归零码(RZ):在每一位二进制信息传输之后均返回零电平的数字数据编码。 7、非归零码(NRZ):在整个码元时间内维持有效电平的数字数据编码。 8、差分码:用电平的变化与否来代表逻辑“1”和“0”的数字数据编码。 9、基带传输:就是在数字通信的信道上按数据波的原样进行传输,不包含有任何调制。 10、载波传输:采用数字信号对载波进行调制后实行传输。 11、单工通信:指传送的信息始终是一个方向,而不进行与此相反方向的传送。 12、半双工通信:指信息流可在两个方向上传输,但同一时刻只限于一个方向传输。 13、全双工通信:指能同时作双向通信。 14、广播式网络:仅有一条通信信道,由网络上的所有机器共享。短的消息,即按某种语法组织的分组或包,可以被任何机器发送并被其它所有的机器接收。分组的地址字段指明此分组应被哪台机器接收。一旦收到分组,各机器将检查它的地址字段。如果是发送给它的,则处理该分组,否则将它丢弃。 15、点到点网络:由一对机器之间的多条连接构成。为了能从源到达目的地,这种网络上的分组可能必须通过一台或多台中间机器。 16、类:一组表示同种系统组件的对象。一个类是一个对象的一种概括。一个类中所有的对象在形式和行为上是相同的,但是它们可以包含不同的属性值。 17、实例:一个对象的一个明确的真实(物理)事件。 18、属性:一个对象的一个外部可视特性或特点的一种描述。
振动主动控制 振动控制是振动工程领域内的一个重要分文,是振动研究的出发点与归宿。从广义上说,振动控制包括两方面的内容‘一是振动的利用,充分利用有利的扳动,如各类振动机器等;另一是振动的抑制,尽量减小有害的振动,因为振动加速运转机械的磨损,缩短产品与结构的寿命,使人易于疲劳,侵仪器易于失灵。本书所讲的振动控制,只是振动的如制。 振动控制的任务就是通过一定的手段位受控对象的振动水平满足人们的预定要求。 这里,受控对象是各类产品、结构或系统的统称。为达到振动控制的目的所采取的手段,通常需经历如下五个环节: (1)确定振源特性与振动特征:确定振源的位置,激励的特性(简谐件、周期性、窄带随机性或宽带随机性)。振动特征(受迫型、白激型或参微型)等,因为不同性质的振源引起的振动,其解决的方法也不同。 (2)确定振动控制水平,即确定衡量振动水平的量及其指标,这些量可以是位移、速度或加速度、应力等,也可以是其最大值或均方根值。 (3)确定振动控制方法:不同的振动控制方法其适用性不同,这些方法包括隔振、吸振、阻振、消振及结构修改等。 (4)进行分析与设计:包括建立受控对象与控制装置(如吸振器、隔振器、阻尼器等)的力学模型、进行振动分析,以及对控制装置参数与结构的设计。 (5)实现:将控制装置的结构与参数从设计转化为实物。可实现性是振动控制研究中必须注意的重要问题。 按所采用的抑制振动手段区分,振动控制方法有五种: (1)消振:即消除或减弱振源,这是治本的方法。因为受控对象的响应是由根源(激励)引起的,外因消除或减弱,响应自然也消除或减弱。如对不平衡的刚性或柔性转子,采用动平衡方法消除或减弱它们在转动时因质量不平衡出现的离心力及力矩;如对高烟囱、热交换器等结构,由于卡门涡引起的流激振动,
耗能方案 性能来抵御地震作用的,即由结构本身储存和消耗地震能量,以满足结构抗震设防标准,小震不坏,可能无法满足安全性的要求;另一方面,在满足设计要求的情况下,结构构件的尺寸可能需做得很大木工程领域新兴一种新型的抗震方式——结构振动控制,即对结构施加控制机构,由控制机构和结构 半主动控制和混合控制。 是由控制装置随结构一起振动变形而被动产生的。被动控制可分为基础隔震技术、耗能减震技术和吸是由控制装置按某种控制规律,利用外加能源主动施加的。主动控制系统由传感器、运算器和施力作术。主动控制有主动拉索系统(ATS)、主动支撑系统(ABS)、主动可变刚度系统(AVSS)、主动质期开始研究主动控制。目前,主动控制在土木工程中的应用已达30多项,如日本的Takenaka实验控制力虽也由控制装置自身的运动而被动的产生,但在控制过程中控制装置可以利用外加能源主动调置、半主动TMD、半主动力触动器、半主动变刚度装置和半主动变阻尼装置等。 主动控制,或者是同时应用不止一种的被动控制装置,从而充分发挥每一种控制形式和每一种控制装:同时采用AMD和TMD的混合控制系统、主动控制和基础隔震相结合的混合控制系统以及主动控制和
京的清水公司技术研究所。 ,但由于建筑结构体形巨大导致所需的外加能源较大,加之控制装置的控制的算法比较复杂,而且存好,容易实现,目前发展最快,应用最广,尤其是其中的基础隔震技术已相当成熟,并得到了一定程主动控制低廉,而且不需要较大的动力源,因此其具有广阔的应用和发展前景;混合控制综合了某几 和耗能减震技术。 置控制机构来隔离地震能量向上部结构传输,使结构振动减轻,防止地震破坏。目前研究开发的基础和混合隔震等。近年来,越来越多的国家开展了基础隔震技术的研究,因此,隔震技术也得到了飞速:日本94栋,美国21栋,中国46栋,意大利19栋,新西兰16栋,已采用了基础隔震技术。最近有 使结构的振动能量分散,即结构的振动能量在原结构和子结构之间重新分配,从而达到减小主结构振尼器(TLD);(3)质量泵;(4)液压—质量控制系统(HMS);(5)空气阻尼器。其中,应用最多两个重300吨的TMD,质量块在9米长的钢板上滑动,它很好地减小了大楼的风振反应,防止了玻璃幕nade桥的桥塔均安装了TMD,其减震效果均令人十分满意。日本的Yokohama海岸塔是一个高101米析表明,安装了TLD后塔的阻尼比由0.6%增加到4.5%,在强风作用下塔的加速度减小到原来的1/3 TLD以控制其风振反应。
一、主动控制简介 1.概念:结构主动控制需要实时测量结构反应或环境干扰,采用现代控制理论的主动控制算法在精确的结构模型基础上运算和决策最优控制力,最后作动器在很大的外部能量输入下实现最优控制力。 2.特点:主动控制需要实时测量结构反应或环境干扰,是一种需要额外能量的控制技术,它与被动控制的根本区别是有无额外能量的消耗。 3.优缺点:主动控制具有提高建筑物的抵抗不确定性地面运动,减少输入的干扰力,以及在地震时候自动地调整结构动力特征等能力,特别是在处理结构的风振反应具有良好的控制效果,与被动控制相比,主动控制具有更好的控制效果。但是,主动控制实际应用价格昂贵,在实际应用过程中也会存与其它控制理论相同的问题,控制技术复杂、造价昂贵、维护要求高。 4.组成:传感器、控制器、作动器 5.工作方式:开环、闭环、开闭环。 二、简单回顾主动控制的应用与MATLAB应用 1.主动变刚度AVS控制装置 工作原理:首先将结构的反应反馈至控制器,控制器按照事先设定好的控制算法并结合结构的响应,判断装置的刚度状态,然后将控制信号发送至电液伺服阀以操纵其开关状态,实现不同的变刚度状态。 锁定状态(ON):电液伺服阀阀门关闭,双出杆活塞与液压缸之间没有相对位移,斜撑的相对变形与结构层变形相同,此时结构附加一个刚度; 打开状态(OFF):电液伺服阀阀门打开,双出杆活塞与液压缸之间有相对位移,液压缸的压力差使得液体发生流动,此过程中产生粘滞阻尼,此时结构附加一个阻尼。 示意图如下: 2. 主动变阻尼AVD控制装置 工作原理:变孔径阻尼器以传统的液压流体阻尼器为基础,利用控制阀的开孔率调整粘性油对活塞的运动阻力,并将这种阻力通过活塞传递给结构,从而实现为结构提供阻尼的目的。关闭状态(ON):开孔率一定,液体的流动速度受限,流动速度越小,产生的粘滞阻尼力越大,开孔率最小时,提供最大阻尼力,此时成为ON状态; 打开状态(OFF):控制阀完全打开,由于液体的粘滞性可提供最小阻尼力。 示意图如下:
浅谈建筑结构振动控制 摘要:文章从不同角度对结构振动控制进行了分类,介绍了其发展与现状,并对近年来控制理论在结构控制方而的新进展给以综述,最后对有待进一步研究的问题进行了探讨,以促进结构振动控制的研究。 关键词:结构振动控制;自主控制;上木工程结构 abstract: this article from a different perspective on the structural vibration control classification, its development and status, and give summarized in the the structure controlling party and the new advances in control theory in recent years, last discussed the issue needs further study .to promote the study of the structural vibration control.key words: structural vibration control; self-control; engineering structures on wood 中图分类号:c935 文献标识码:a 文章编号:2095-2104(2012)结构振动控制是一个应用领域广泛的工程问题。所谓结构振动控制(以下称为结构控制)是指采用某种措施使结构在动力载荷作 用下的响应不超过某一限量,以满足工程要求。 结构控制问题是一种多学科交叉的理论与工程问题,其结构类型繁多、控制目标不同、实现手段多样。目前,国内外控制界对这类问题的研究十分重视,有大量的学术论文发表,其中不少新结果得到了实际工程应用。本文旨在对当前结构控制的一此新进展加以
石油化工行业工业控制网络 安全 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
石油化工行业工业控制网络安全 石油化工企业是典型的资金和技术密集型企业,生产的连续性很强,装置和重要设备的意外停产都会导致巨大的经济损失,因此生产过程控制大多采用DCS等先进的控制系统,DCS控制系统的供应商主要有霍尼韦尔、艾默生、横河电机、中控科技等。 1. 石油化工行业网络安全分析 石油化工企业是典型的资金和技术密集型企业,生产的连续性很强,装置和重要设备的意外停产都会导致巨大的经济损失,因此生产过程控制大多采用DCS等先进的控制系统,DCS控制系统的供应商主要有霍尼韦尔、艾默生、横河电机、中控科技等。 在早期,由于信息化程度水平有限,控制系统基本上处于与信息管理层处于隔离状态。因此,石化企业的信息化建设首先从信息层开始,经过10多年的建设积累,石化&化工行业信息层的信息化建设已经有了较好的基础,涉及到了石油勘探、开发、炼油、化工、储运、销售、数据管理等诸多研究领域,企业在管理层的指挥、协调和监控能力,提高上传下达的实时性、完整性和一致性都有很大提升,相应的网络安全防护也有了较大提高。与其他行业一样,在信息管理层面,石化石化企业大量引入IT技术,同时也包括各种 IT 网络安全技术,包括如防火墙、IDS、VPN、防病毒等常规网络安全技术,这些技术主要面向商用网络应用,应用也相对成熟。 与此同时,在信息技术不断发展的推动下,石化&化工企业的生产管理理念和技术也在不断发展,DCS发展到今天,已经进入了第四代,新一代DCS呈现的一个突出特点就是开放性的提高。石化&化工企业普遍开始采用基于ERP/SCM、MES和PCS三层架构的的管控一体化信息模型思想,随着两化融合政策的推进,越来越多的石化企业实施MES系统,使管理实现了管控一体化。
振动污染及其控制技术 1402032026孙小飞环境工程(2)班 摘要:现如今随着社会的发展,物理性污染愈发严重。其中振动污染也是其中的一部分,本文着重介绍了振动污染及其控制技术的内容。 关键词:振动污染;控制技术。 一、概述 振动定义:(1)任何一个可以用时间的周期函数来描述的物理量,都称之为振动(2)当一个物体处于周期性往复运动的状态,即可说物体在振动。 1.振动现象 物理现象:声、光、热等物理现象都包含振动;生命和生活:心脏搏动、耳膜和声带的振动是人体的基本功能。 工程技术领域: 桥梁和建筑物在阵风或地震激励下的振动 飞机和船舶在航行中的振动, 机床和刀具在加工时的振动, 各种动力机械的振动, 控制系统中的自激振动等。 2.振动污染: 振动超过一定的界限,从而对人体的健康和设施产生损害,对人的生活和工作环境形成干扰,或使机器、设备和仪表不能正常工作。 振动污染源有自然源和人工源 自然源:地震、火山爆发等自然现象。 自然振动带来的灾害难以避免,只能加强预报减少损失。 人工源:工业振动源:旋转机械、往复机械、传动轴系、管道振动等,如锻压、铸造、切削、风动、破碎、球磨以及动力等机械和各种输气、液、粉的管道。特征参数:常见工厂振源附近面上加速度级:80~140dB;振级:60~100dB;峰值频率:10~125Hz。 工程振动源:工程施工现场的振动源主要是打桩机、打夯机、水泥搅拌机、辗压
设备、爆破作业以及各种大型运输机车等。特征参数:常见工程振源附近 振级:60~100dB。 铁路振源: 频率:一般在20~80Hz范围内; 离铁轨30m处的振动加速度级范围85~100dB,振动级范围75~90dB内 公路振源: 频率:一般在2~160Hz范围内,其中以5~63Hz的频率成分较为集中; 振级:多在65~90dB范围内。 二、振动的影响 振动的生理影响主要是损伤人的机体,引起循环系统、呼吸系统、消化系统、神经系统、代谢系统、感官的各种病症,损伤脑、肺、心、消化器官、肝、肾、脊髓、关节等人们在感受到振动时,心理上会产生不愉快、烦躁、不可忍受等各种反应。除振动感受器官感受到振动外,有时也会看到电灯摇动或水面晃动,听到门、窗发出的声响,从而判断房屋在振动。人对振动的感受很复杂,往往是包括若干其他感受在内的综合性感受。振动引起人体的生理和心理变化,导致工作效率降低。振动可使视力减退,用眼工作时所花费的时间加长。振动使人反应滞后,妨碍肌肉运动,影响语言交谈,复杂工作的错误率上升等。振动通过地基传递到构筑物,导致构筑物破坏。如,基础和墙壁龟裂、墙皮剥落,地基变形、下沉,门窗翘曲变形,构筑物坍塌,影响程度取决于振动的频率和强度。由于共振的放大作用,其放大倍数可由数倍至数十倍,因此带来了更严重的振动破坏和危害。 三、振动控制技术 振动控制的任务:通过一定手段使受控对象振动水平满足预定要求。 受控对象:各类产品、结构或系统的统称。 实现控制振动的目的需经历的五个环节(1)确定振源特性与振动特征 (2)确定振动控制水平 (3)确定振动控制方法 (4)进行分析与设计 (5)实现振动控制
龙源期刊网 https://www.doczj.com/doc/dd11546538.html, 浅谈建筑结构振动控制技术 作者:翟永兵 来源:《智富时代》2018年第03期 【摘要】近年来,随着我国经济的飞速发展,人民生活水平的日益提高,同时也带动了 我国建筑工程的快速发展,而在建筑工程结构振动控制技术中,传统的抗震结构体系是通过加强结构本身的性能从而达到“抗御”地震的目的。土木工程结构振动控制有利于降低结构在地震、流水、海浪、风、车辆等动力作用下结构所造成的损伤,能够有效地将结构抗震防灾能力相对增强。结构控制引起了世界各国地震工程界的广泛重视,是一种新型的结构抗震技术。但这种方法的作用与安全性相对是较低的,所以在这种不确定性的地震作用下,结构的安全性能并不能得到充分的保障,最后产生倒塌或遭到严重破坏,造成人员伤亡与巨大的经济损失。本文就建筑工程结构振动控制技术进行分析,并对其的发展进行讨论。 【关键词】建筑工程;震动控制;发展 一、结构控制的特点、发展与现状 (一)按控制对能量需求来划分 从控制对外部能量需求的角度,结构控制可分为:被动结构控制、主动结构控制、混合结构控制、半主动结构控制。除被动控制外,其他三种控制方式中的控制力全部或部分地根据反馈信号按照某种事先设计的控制律实时产生。主动结构控制效果较好,对环境有较强的适应力,但完全依赖外部能源,闭环稳定性比其他方式差。在被动控制中,控制力不是由反馈产生的。其主要优点是;成本低、不消耗外部能量、不会影响结构的稳定性;缺点是:对环境变化的适应力与控制效果不如其他方案。混合控制是指用主动控制来补充和改善被动控制性能的方案。由于混合了被动控制,因此减小了全主动控制方案中对能量的要求。半主动控制中通常包含某种对能量需求很低的可控设备,如可变节流孔阻尼器等作用时所需的外部能量通常比主动控制小得多。因此初步研究表明混合控制与半主动控制的性能大大优于被动控制,甚至可达到或超过主动控制的性能,并在稳定性与适用性方面要优于后者,因此成为当前研究的一个热点。 (二)按结构特性划分 从被控结构的特性划分,结构控制可分为柔性结构控制与刚性结构控制。其中柔性结构包括大型柔性空间结构、大跨度桥梁等;刚性结构则包括武器系统中稳定平台、车辆悬挂系统、多刚体机器人等。对于两类结构控制所用的主动控制设备也不相同,如在柔性结构控制中传感器与执行器常用的智能材料是分布智能材料,如压电材料;而刚性结构控制中传感器与执行器常用的智能材料是电智能材料,如磁致伸缩材料。
第28卷第3期 振动与冲击 JOI7RN^f.OFVIBRATIONAND.qHOCK 振动控制技术现状与进展 陈章位,于慧君 (浙江大学流体传动及控制国家重点实验室,杭州310027) 摘要:总结了白20世纪40年代开始振动试验研究以来振动控制技术的发展,论述了在振动控制算法以及振动试验激振设备等方面周内外研究所取得的主要成就。在此基础上提fi{r振动控制技术今后值得父注的研究方向和重点,如实际振动环境复现试验控制、多轴多自由度振动控制等。 关键词:振动控制;振动试验;进展;展望 中图分类号:TB534+.2文献标识码:A 自从在二次世界大战中战斗机等多种军用设备因受振动而造成损坏的现象引起重视后,为了更好地模拟产品的真实振动环境、对产品可靠性进行检验,20世纪40年代开始人们引入了振动试验。随着现代科学技术的进步,振动试验在产品的生产、设计以及可靠性、耐久性试验方面起到了越来越重要的作用。 振动试验系统主要由激振器、控制器、试件以及夹具所组成。在这几十年来的发展中,为了更真实地模拟实际的振动环境,激振器越来越复杂,同时也带来了问题就是如何精确地控制激振器使得激振器产生的振动信号能够与试验要求产生的信号一致,也即需要进一步提高控制器的性能。由此本文从三方面对振动控制技术进行综述,一是当前振动试验激振设备的发展;二是当前振动控制算法的发展以及在当前的振动试验产品中普遍采用的控制算法:三是当前控制器的发展,在此基础上提出了振动控制技术今后的研究方向和重点。 1国内外进展 1.1振动试验激振设备进展 用于振动试验的振动试验激振设备从其激振方式上主要可分为三类:机械式振动台、电液式振动台和电动式振动台¨“1。 1.1.1机械式振动台进展 机械式振动台主要有不平衡重块式和凸轮式两类。不平衡重块式是以不平衡重块旋转时产生的离心力来激振振动台台面,激振力与不平衡力矩和转速的平方成正比。这种振动台可以产生正弦振动,其结构简单,成本低,但只能在约5Hz一100Hz的频率范围工作,最大位移为6mm峰-峰值,最大加速度约10g,不能进行随机振动。 凸轮式振动台运动部分的位移取决于凸轮的偏心 收稿日期:2008-01-03 第一作者陈章位男,教授,1965年生量和曲轴的臂长,激振力随运动部分的质量而变化。这种振动台在低频域内,激振力大时,可以实现很大的位移,如100mm。但这种振动台工作频率仅限于低频,上限频率为20Hz左右。最大加速度为3g左右,加速度波形失真很大。 机械式振动台由于其性能的局限,主要应用于要求不高的领域。 1.1.2电动振动台进展 电动式振动台是目前使用较广泛的一种振动试验激振设备。它的工作原理是:根据电磁感应原理设计的,当通电导体处在恒定磁场中将受到力的作用,当导体中通以交变电流时将产生振动。振动台的激励线圈正是处在一个高磁感应强度的空隙中,需要的振动信号从信号发生器或振动控制器产生并经功率放大器放大后通到激励线圈上,使得振动台产生需要的振动波形。 电动式振动台的频率范围宽,小型振动台频率范围为0Hz一10kHz,大型振动台频率范围为0Hz~2kHz;动态范围宽,易于实现自动或手动控制;加速度波形良好,适合产生随机波形。因此目前主要应用于高频率范围、推力较小、波形失真要求较高的试验领域。虽然目前电动振动台在推力方面已经做得越来越大,已经可以达到35t的推力,但是当它的推力超过10t以后,前述的电动振动台优势不是很明屁,各种因素的干扰也越来越大,而且成本增加很多。同时由电动式振动台的工作原理所决定,在振动试验的过程中,它的台面上不可避免会产生漏磁现象,这对于某些军用产品的试验是不可行的。因此,在这些情况下需要用电液振动台来进行试验。 1.1.3电液振动台进展 电液式振动台作为振动试验的常用设备之一。它的工作方式是采用电液伺服阀,通过液压控制传动装置产生振动激励。输入的电控信号经放大器放大进入伺服阀,伺服阀把与输入信号成比例的液压油输入液压缸,以驱动活塞并带动台面运动。 万方数据
受电弓振动主动控制研究现状分析 □宋一凡郭德勇梁继国 【内容摘要】电力机车高速行驶时,弓网振动将导致弓网接触力产生波动进而引起机车受流不良,降低机车运行性能甚至会损害机车电气设备。受电弓主动控制可以有效减小弓网振动,本文从控制算法方面介绍了受电弓振动主动控制的研 究现状,总结分析了近年来国内外学者在这方面取得的研究成果以及各种控制算法的优缺点,并展望了未来受电 弓振动主动控制的发展趋势和研究方向。 【关键词】电力机车;受电弓振动;主动控制;控制算法 【基金项目】本文为东北林业大学国家级大学生创新实验项目“电动载货车高速路随动取电装置”(编号:201810225079)资助项目研究成果。 【作者单位】宋一凡、郭德勇,东北林业大学交通学院;梁继国,吉林省辉南经营局 一、引言 受电弓与接触网接触受流牵引电力机车运行,空气动力、接触网的波传播和波反射、不规则风和轮轨状况等因素将引起弓网振动,而弓网振动将降低机车受流质量、加剧弓网磨损、增大运行噪声。随着机车运行时速提高,弓网振动带来的危害也将加剧,弓网振动成为限制电力机车提速的重要因素。目前,主要有两种方法解决振动问题:一是提高接触网刚度或增大接触线张力,二是增大弓网接触力。这两种方法均在一定程度上减小了弓网振动,但第一种需要更换接触网,成本巨大;第二种加剧弓网磨损的同时增大了安全隐患[1]。研究人员不得不寻找新的途径来解决振动问题,早期研究者提出利用主动控制技术来提高受电弓的跟随性。进行可控受电弓的研究渐渐成为了机车受电弓研究的一个重要课题。 对于受电弓振动主动控制的研究,欧洲和日本学者起步较早,2003年7月速度可达230km/h的振动主动控制受电弓在德国就已试验成功[2]。而我国学者对此类课题的研究起步较晚,发展尚停留在实验室阶段。尽管国内外已有很多研究涉及这一领域,但大多仅停留在控制策略的提出和数值仿真验证,难以在实践中得到应用,实现的瓶颈主要在于作动器的选择和能量供应问题,以及接触力反馈信号的实用性。本文从控制算法和作动器两个方面来介绍受电弓主动控制的研究现状和存在的问题,以期为受电弓主动控制的研究提供一些思路。 二、控制算法 控制算法作为主动控制的核心对其应有如下要求:所需控制信息量少,计算速度快,输出信息易于执行,复杂控制具有一定的自适应性。国内外对控制算法进行了大量研究,大体可分为以下五类(列出)。 (一)模糊控制。模糊控制自第一次成功应用以来,模糊控制理论已得到突飞猛进的发展,解决了许多现实问题。模糊控制具有很强的鲁棒性,适用于工作条件下具有非线性和参数时变性的受电弓,因此受电弓的模糊控制受到了学者的关注。 (二)变结构控制。由于变结构控制具有极强的鲁棒性且实现容易,尤其可以良好地自适应系统干扰,适用于线性和非线性,可有效处理弓网振动问题。但其缺点是当变结构控制到达切换面后受时滞和惯性的影响在滑模面附近来回穿梭,引起变结构振颤。变结构控制可分为两类,一类是非滑模变结构控制,另一类是滑模变结构控制。研究者对这两种变结构控制均有应用。 (三)线性二次型控制。线性二次型控制适用于时变系统,控制能量低,计算精度高,能有效处理扰动信号和测量噪声问题且易于构成闭环最优控制,可作为处理弓网振动问题的有效途径。 (四)预测控制。预测控制应具备以下三项基本原理:预测模型、滚动优化和反馈校正。线性模型的预测控制算法已非常成熟,但实际所需的控制系统大多是非线性的,因此现在预测控制的研究重点就成为非线性模型预测控制,弓网振动模型便是一种典型的非线性模型,相关研究者也将非线性模型预测控制用于受电弓的主动控制。 Mihai-Florin Taran等提出了一种基于模型预测控制策略的接触力闭环控制方法。预测控制使用有限变量构造的有限滚动时域估计,使用系统模型的离散时间公式,利用接触网模型中时变表达式得到离散模型,并提出二阶离散化方法,增设积分以消除稳态误差,得到线性时变模型。将控制目标转化为一个凸函数以表达误差的权重和对有限滚动时域估计的控制力[3]。任志玲根据弓网模型和接触力数据,利用预测控制技术预测下一时刻接触力,将预测值与理论值比较计算误差,模型预测控制器通过电流变阻尼器将计算结果转换为接触力的控制输入量。实验结果表明能够有效提高弓网耦合质量[4]。 (五)神经网络模型。刘仕兵等将NARMA-L2模型应用到弓网振动控制系统中并给出了控制方案:控制系统分为系统辨识部分和控制部分。系统识别部分采用在线辨识,响应快迟滞小,增加了系统的实时性。系统首先从被控制系统 · 36 ·
万方数据
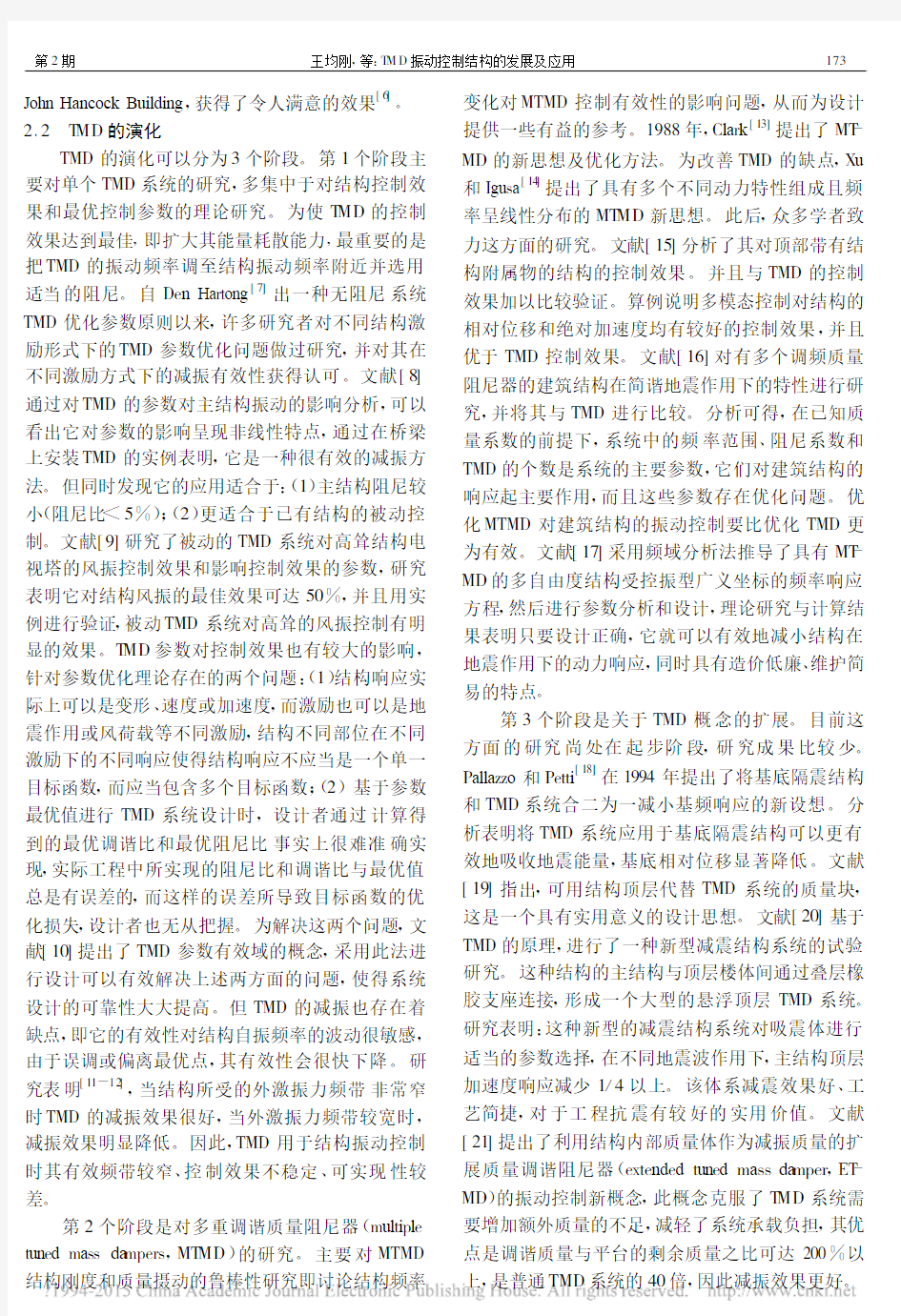
万方数据 万方数据 《6? 善s. 曼s. 蓑s. 辎4. 图6模拟结构阻尼比随TLMD频率比变化曲线 模拟结构阻尼比达到极值。频率比在0.96~0.98区间,即频率比在最优值附近改变±1%时,模拟结构阻尼比变化较为平缓且均在6%以上。
实桥通常采用多重TLMD(MTLMD进行减振,为此在室内进行了MTLMD减振性能试验。分别将1~4台频率和阻尼均调为优化值的减振器固定到上述模拟结构上进行试验,得到模拟结构阻尼比随TLMD总质量比变化的曲线如图7所示,按TMD 理论计算的相应曲线亦绘于图7。从图7可知,模拟结构的阻尼比随TLMD总质量比增加而增大,4台TLMD(质量比1.91%时,模拟结构阻尼比达到7.13%,抑振效果非常好。1~4台TLMD 的试验值与同质量比下的TMD理论计算值比较,模拟结构阻尼比分别提高27%、23%、35%和46%,说明新型TLMD双调谐减振器由于同时具有TLD 和TMD的抑振效能,抑振性能在TMD基础上有大幅提升。 图7MTLMD抑振性能的试验值与TMD理论僵对比3.1.3实桥试验 选取九江长江大桥三大拱中2根典型吊杆(C32A32和C10A10,对该新型减振器进行了减振性能实桥试验。在每根吊杆上安装4台活动质量均为10kg的减振器,如图8所示。首先撤下吊杆原有TMD减振器,分别进行激振并得到吊杆自身的自振特性;然后安装试验用新型减振器TLMD对吊杆激振,进行新型TLMD减振性能试验;最后对撤下的既有TMD减振器进行检修,使之恢复最佳状态,重新安装到吊杆上进行综合减振性能试验。试验结果如图9所示。 由图9可知,吊杆C32A32和C10A10在TLMD质量比分别为1.57%与1.56%的情形下, 图8新型TLMD实桥安装 图9实桥试验结果 目标振型阻尼比达到了5.09%和3.58%,阻尼分别提高了50.9倍和35.8倍。对非目标振型,结构阻尼比也有所提高。对比原TMD在质量比为1.9%时,目标振型阻尼比为3%左右,TLMD具有更好的减振效果。TLMD与TMD减振器共同工作时,目标振型的结构阻尼比进一步增加到5.47%和4.98%,非目标振型的结构阻尼比有更明显的提高。
振动半主动控制技术研究现状与前景展望 在过去三十年左右的时间里,振动控制系统受到了广大研究者的普遍关注。这种保护系统可以用来降低自然灾害对土木工程建筑的损害。文章通过对结构振动控制的概述,介绍了半主动控制装置的理论基础及其在实际机械或土木工程中的应用,并对半主动控制技术未来的发展方向做了展望。 标签:半主动控制;主动变刚度(阻尼);磁流变阻尼器;电流变阻尼器 引言 随着科学技术的飞速发展,机器设备的转速和功率不断变大,刚度减小,对其稳定性的要求也提高,振动问题也就日益突出,机械振动不仅影响飞行器、船舶的寿命,还会影响机械设备的使用性能,因而如何对其采取控制和预防措施成了工程领域的重要课题。 半主动控制技术的控制效果接近于主动控制,而且只需要输入少量的能量即可实现,因而被认为是目前最具前景的结构振动控制技术。文章主要介绍几种主要半主动控制系统的工作机理、应用和研究现状,并阐述了半主动控制技术目前存在的问题和发展方向。 1 半主动控制系统研究现状 1.1 主动变刚度控制系统 该控制系统主要是在变刚度控制装置的作用下,使振动物体的附加刚度发生变化,从而使受控结构的固有频率不断发生变化,有效地避免共振的情况,达到减振的目的。在这个过程中,结构的能量发生了变化,经历了振动能量的吸收、消耗与释放这一过程。 日本学者Kobor i[1]利用主动变刚度系统做了振动台模型试验和原型结构试验,验证了这种控制系统的装置可以改变物体动力参数,且仅需要极少的外界能量,就可以得到十分明显的减振效果。在国内,李敏霞和刘季[2]等学者在这方面做了深入的研究,制作了类似的主动变刚度控制装置,并进行了一个40t足尺的主动变刚度装置的性能试验,该实验主要研究了电液伺服阀在Passive-on和Passive-off状态下主动变刚度控制装置的力学性能。杨润林,闫维明[3]等提出了一种新型的半主动变刚度(ISA VS)控制系统,并通过数值模拟验证了它的有效性。 1.2 主动变阻尼控制系统 变阻尼系统由Hovat首先提出[4],它是通过主动调节变阻尼装置,使其阻尼力变化至接近或等于主动控制力,得到的振动控制效果也和主动控制接近。主