多功能全液压钻机系统及工作原理
0引言
钻机一般是在矿洞或露天等地点进行钻孔作业,工作时噪声大,钻机附近粉尘较大,尤其是在无除尘设备、工作场地相对封闭情况时,整个工作环境相当恶劣。为了保证操作者的安全,使其远离噪声、粉尘,同时又能使操作人员始终处于最佳观察控制位置进行操作。我们设计了一种全液压系统钻机,其钻杆的旋转、推进、退出以及钻杆倾角的调整、固定等都是由液压传动实现的。该钻机液压油源、控制台和主机三部分采用了分体结构,各部分之间用高压橡胶软管进行连接。所以,控制台可灵活地放置在较远的地方。
1结构原理简介
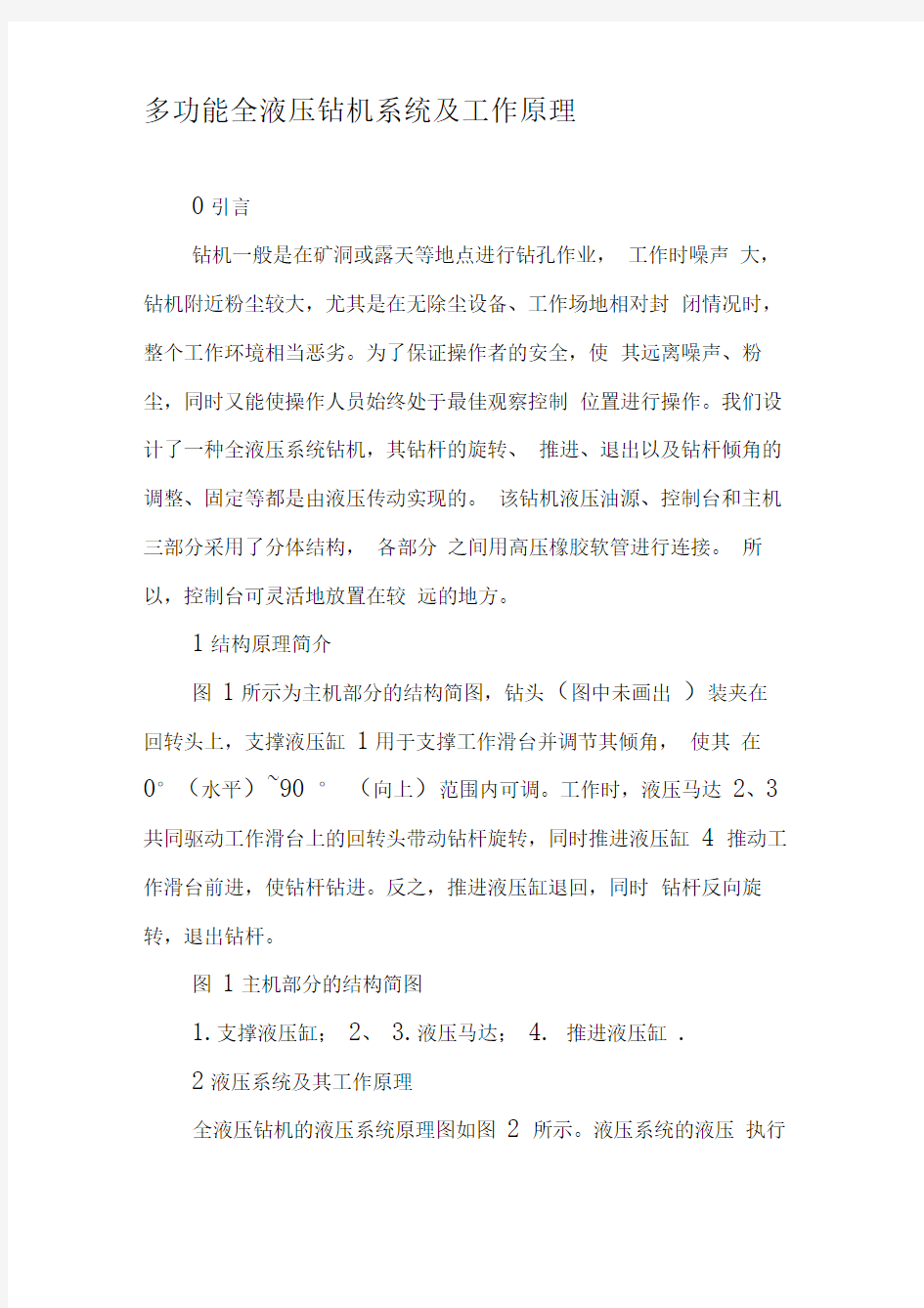
图1所示为主机部分的结构简图,钻头(图中未画出)装夹在回转头上,支撑液压缸1用于支撑工作滑台并调节其倾角,使其在0°(水平)~90 ° (向上)范围内可调。工作时,液压马达2、3 共同驱动工作滑台上的回转头带动钻杆旋转,同时推进液压缸4 推动工作滑台前进,使钻杆钻进。反之,推进液压缸退回,同时钻杆反向旋转,退出钻杆。
图1主机部分的结构简图
1.支撑液压缸;2、3.液压马达;4. 推进液压缸.
2液压系统及其工作原理
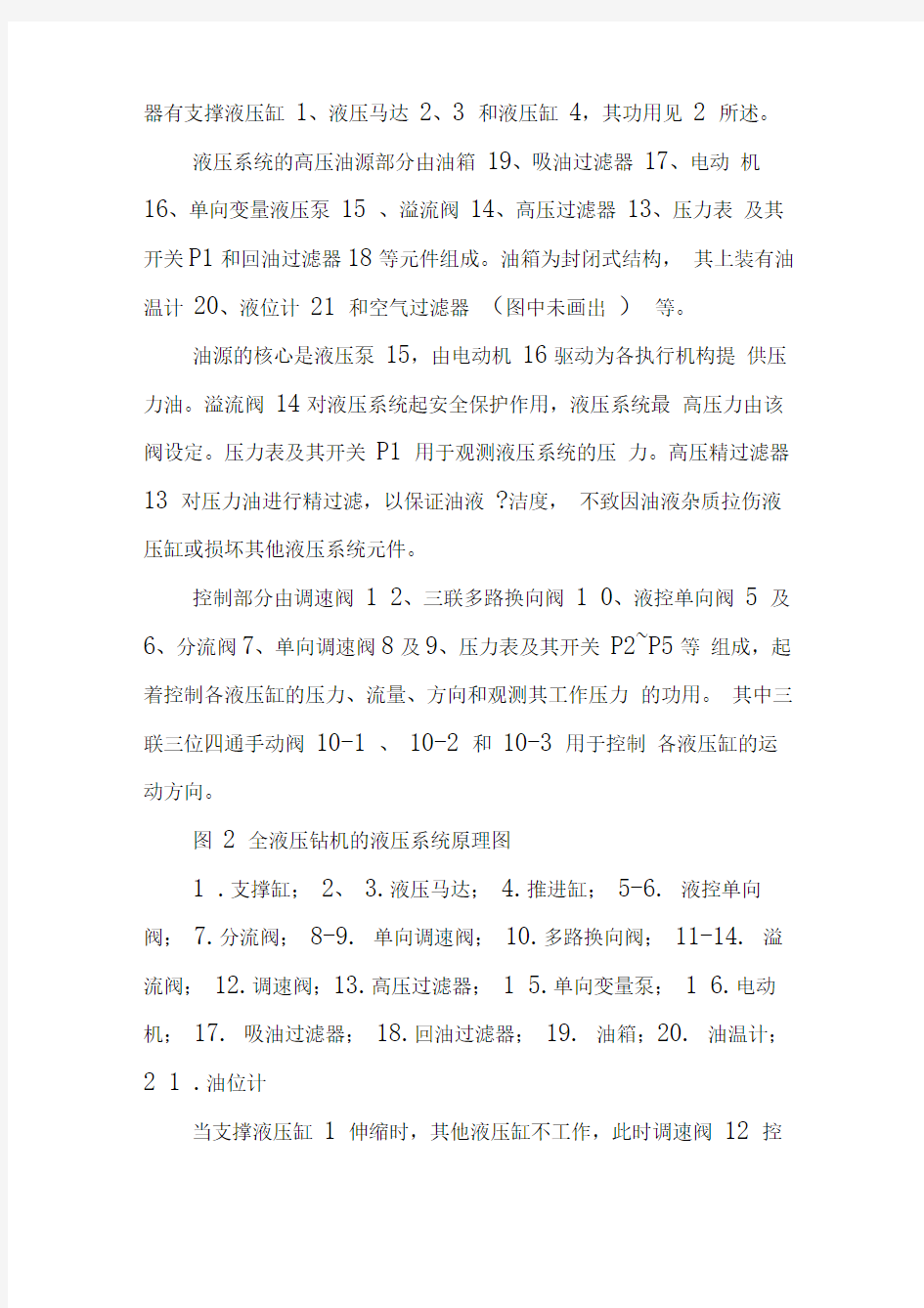
全液压钻机的液压系统原理图如图2 所示。液压系统的液压执行
器有支撑液压缸1、液压马达2、3 和液压缸4,其功用见2 所述。
液压系统的高压油源部分由油箱19、吸油过滤器17、电动机16、单向变量液压泵15 、溢流阀14、高压过滤器13、压力表及其开关P1和回油过滤器18等元件组成。油箱为封闭式结构,其上装有油温计20、液位计21 和空气过滤器(图中未画出)等。
油源的核心是液压泵15,由电动机16驱动为各执行机构提供压力油。溢流阀14对液压系统起安全保护作用,液压系统最高压力由该阀设定。压力表及其开关P1 用于观测液压系统的压力。高压精过滤器13 对压力油进行精过滤,以保证油液?洁度,不致因油液杂质拉伤液压缸或损坏其他液压系统元件。
控制部分由调速阀1 2、三联多路换向阀1 0、液控单向阀5 及6、分流阀7、单向调速阀8及9、压力表及其开关P2~P5等组成,起着控制各液压缸的压力、流量、方向和观测其工作压力的功用。其中三联三位四通手动阀10-1 、10-2 和10-3 用于控制各液压缸的运动方向。
图2 全液压钻机的液压系统原理图
1 .支撑缸;2、3.液压马达;4.推进缸;5-6. 液控单向阀;7.分流阀;8-9. 单向调速阀;10.多路换向阀;11-14. 溢流阀;12.调速阀;13.高压过滤器;1 5.单向变量泵;1 6.电动机;17. 吸油过滤器;18.回油过滤器;19. 油箱;20. 油温计;
2 1 .油位计
当支撑液压缸1 伸缩时,其他液压缸不工作,此时调速阀12 控
制支撑液压缸活塞杆的伸缩速度,以改变钻杆倾角。当支撑液压缸调节完成后,多路换向阀10 中的阀10-1 置于中位,钻杆的倾角固定,支撑液压缸由液控单向阀5和6构成的双向液压锁加以锁紧。
当钻杆钻进或退出时,多路换向阀10 中的阀10-2 、10-3 各自切换至相应位置,推进速度或退出速度由单向调速阀8、9 调整,压力表P4、P5 分别显示推进液压缸进给压力或退出压力。液压马达2和3的同步运动由分流阀7控制,马达转速用调速阀12调整,从而控制钻杆的转速,通过压力表P2、P3 可观测到马达2和3的进、出口压力,进而得知钻杆的转矩。
3 结语
我矿自2011 年使用该钻机后,工人反映劳动强度降低了,噪声粉尘减少了,机器操作简单方便了,掘进进度也提高了
各类型钻机简介 <1> GY-300A型钻机 (价格面议) 单位:台 型号:GY-300A 重量(kg):1300kg(不含动力机) 品牌:长探 上架时间:2010-6-8 简要说明: GY-300A型钻机是一种中浅孔岩芯钻机,它主要用于以合金、金刚石为主进行大、小口径的岩芯钻探,也可以用于工程地质勘察、浅层流体矿产钻探、爆破孔和通风孔的钻进工程、水文、水井、以及大口径的工程施工钻进等。被广泛使用于公路铁路建设、水利水电、建筑等领域。 技术参数: 1、钻孔直径钻进深度 93mm 350m
150mm 280m 200mm 220m 300mm 120m 2、回转器 立轴转速: 正转:58 101 160 221 234 406 640 885r/min 反转:46 183r/min 最大扭矩:3000N*m 立轴行程:600mm 立轴最大上顶力:60KN 立轴最大加压力:45KN 3、升降机 卷筒直径:200mm 钢丝绳直径:14mm 卷筒容绳量(五层)45m 单绳提升速度(第二层):0.45 0.785 1.24 1.71m/s 单绳最大提升能力:30KN 4、钻机移动行程:460mm 5、让开孔口距离:260mm 6、油泵 名称:齿轮油泵 型号:CB-E25 排量:25 mL/r 额定转速:1500 r/min 额定压力:16 MPa 最高压力:20 MPa 7、动力机 柴油机电动机 型号:395K2 Y180L—4 额定功率:20KW 22KW 额定转速:1500r/min 1470r/min 8、钻机外形尺寸(长×宽×高):2510×950×1820mm <2>
交流伺服电机的工作原理 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 4. 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降, 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。 永磁交流伺服电动机 20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。永磁交流伺服电动机同直流伺服电动机比较,主要优点有: ⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。 ⑵定子绕组散热比较方便。 ⑶惯量小,易于提高系统的快速性。 ⑷适应于高速大力矩工作状态。 ⑸同功率下有较小的体积和重量。 自从德国MANNESMANN的Rexroth公司的Indramat分部在1978年汉诺威贸易博览会上正式推出MAC永磁交流伺服电动机和驱动系统,这标志着此种新一代交流伺服技术已进入实用化阶段。到20世纪80年代中后期,各公司都已有完整的系列产品。整个伺服装置市场都转向了交流系统。早期的模拟系统在诸如零漂、抗干扰、可靠性、精度和柔性等方面存在不足,尚不能完全满足运动控制的要求,近年来随着微处理器、新型数字信号处理器(DSP)的应用,出现了数字控制系统,控制部分可完全由软件进行,分别称为摪胧 只瘮或摶旌鲜綌、撊只瘮的永磁交流伺服系统。 到目前为止,高性能的电伺服系统大多采用永磁同步型交流伺服电动机,控制驱动器多采用快速、准确定位的全数字位置伺服系统。典型生产厂家如德国西门子、美国科尔摩根和日本松下及安川等公司。 日本安川电机制作所推出的小型交流伺服电动机和驱动器,其中D系列适用于数控机床(最高转速为1000 r/min,力矩为0.25~2.8N.m),R系列适用于机器人(最高转速为3000r/min,力矩为0.016~0.16N.m)。之后又推出M、F、S、H、C、G 六个系列。20世纪90年代先后推出了新的D系列和R系列。由旧系列矩形波驱动、8051单片机控制改为正弦波驱动、80C、154CPU和门阵列芯片控制,力矩波动由24%降低到7%,并提高了可靠性。这样,只用了几年时间形成了八个系列(功率范围为0.05~6kW)较完整的体系,满足
液压系统基本结构与工作原理 一、概述 液路系统主要包括主油泵,液压油箱,滤清器,减压阀,溢流阀,起升液缸,伸缩液缸,吊钳液缸,支腿液缸,液压马达,及各种液压操作阀等部件。设备出厂前溢流阀、减压阀及各种压力阀的压力已调定,确保液压系统安全运行,用户在使用中不得轻率更改。 液压系统包括主液压系统和转向液压系统,两个系统共用一液压油箱。 1、主液压系统 主液压系统为钻机车在设备调整和钻修作业时提供液压动力,配置有各种阀件,控制操作各液压机具正确安全运行。 2、转向液压系统 转向液压系统为车辆前部车桥的液压助力转向提供液压动力,配置有各种阀件,控制液压系统压力、流向和稳定最高流量,确保车辆转向轻便灵活,安全可靠。 二、结构特点 液压系统由以下组成: ?主液压系统 ?转向液压系统 1、主液压系统 由以下部件组成: 1)液压油箱:存储、冷却、沉淀和过滤液压油。油箱安装有: ●人孔盖,安装在油箱顶部,设置有两个,其中在油箱回油区的人孔盖上安 装液压空气滤清器; ●液压空气滤清器,过滤油箱流通空气,油箱加油时过滤油液; ●液位计,2个,安装在油箱的前侧面,设置有高低两个液位计,高位液位 计,显示井架降落后的油面;低位液位计,显示井架竖起后油面; ●油温表,安装在油箱的前侧面,测量油箱内油温,正常工作油温在30~ 70℃;主回油口,2个,设置在油箱的底板上,配置单向阀,分别连接主
回油管和溢流阀回油口;单向阀在维修液压管路时自动关闭,防止油箱中 的油液流失; ●排泄油口,设置在油箱的底板上,用堵头封堵;打开堵头可排放油箱液压 油; ●主油泵吸油口,设置在油箱的前侧面,安装主吸油滤清器; ●转向油泵吸油口,设置在油箱的前侧面,安装转向吸油滤清器; ●转向系统回油口,设置在油箱的底板上,配置单向阀,单向阀在维修液压 管路时自动关闭,防止油箱中的油液流失; 2)液压油泵:单联齿轮结构,2台,分别安装在两台液力变速箱取力箱上, 由变矩器泵轮驱动,发动机转动,取力箱就可驱动油泵。取力箱配置有液压离合器,当需要液压动作时,可操作司钻控制箱“液泵离合”手柄,置“油泵I合”位,油泵I结合,输出工作压力油液;手柄置“油泵II合” 位,油泵II结合,输出工作压力油液;。手柄置中位,两油泵均脱离停转。 3)溢流阀:先导式结构,2台,分别安装在主液压油泵的出油口端。调定系 统压力,防止系统过载,保护系统及元件安全。 溢流阀的结构原理:由先导阀和主滑阀组成,先导阀部分包括阀体,滑阀,调压弹簧等零件。主阀滑阀上开有一个小孔a,使进口压力油能进入滑阀上腔B,当作用在锥阀上的液压力小于弹簧的预紧力时,先导阀锥阀在弹簧力的作用下关闭,因为阀体内没有油液流动,滑阀上下两端油腔液压力相等。因此,滑阀在上端弹簧的作用下处于下端的极限位置。溢流阀的进出油口被滑阀切断,溢流阀不溢流;当作用在锥阀上的液压力因溢流阀进口压力的升高而增大到等于弹簧力时,锥阀被顶开,滑阀上腔B的油液经回油口b和滑阀中心通孔流入阀的出油口,然后溢流回油箱,这时溢流阀进油口的压力油从小孔a,向上补充到B腔,因为油液经小孔a时存在压力损失,因此B腔的压力低于进油口压力,滑阀上下两端出现压力差。 于是,在上下两端压力差的作用下滑阀克服弹簧力,滑阀自重以及摩擦力向上移动,打开溢流阀的进回油口,油液流回油箱,滑阀开启后,受液动力的影响,进口的压力P还要继续上升,滑阀继续上移,到某一位置滑阀受力平衡时,溢流阀进口压力稳定在一定值,该值称为溢流阀的调定压力。
液压伺服系统工作原理 1.1 液压伺服系统工作原理 液压伺服系统以其响应速度快、负载刚度大、控制功率大等独特的优点在工业控制中得到了广泛的应用。 电液伺服系统通过使用电液伺服阀,将小功率的电信号转换为大功率的液压动力,从而实现了一些重型机械设备的伺服控制。 液压伺服系统是使系统的输出量,如位移、速度或力等,能自动地、快速而准确地跟随输入量的变化而变化,与此同时,输出功率被大幅度地放大。液压伺服系统的工作原理可由图1来说明。 图1所示为一个对管道流量进行连续控制的电液伺服系统。在大口径流体管道1中,阀板2的转角θ变化会产生节流作用而起到调节流量qT的作用。阀板转动由液压缸带动齿轮、齿条来实现。这个系统的输入量是电位器5的给定值x i。对应给定值x i,有一定的电压输给放大器7,放大器将电压信号转换为电流信号加到伺服阀的电磁线圈上,使阀芯相应地产生一定的开口量x v。阀开口x v使液压油进入液压缸上腔,推动液压缸向下移动。液压缸下腔的油液则经伺服阀流回油箱。液压缸的向下移动,使齿轮、齿条带动阀板产生偏转。同时,液压缸活塞杆也带动电位器6的触点下移x p。当x p所对应的电压与x i所对应的电压相等时,两电压之差为零。这时,放大器的输出电流亦为零,伺服阀关闭,液压缸带动的阀板停在相应的qT位置。 图1 管道流量(或静压力)的电液伺服系统 1—流体管道;2—阀板;3—齿轮、齿条;4—液压缸;5—给定电位器;6—流量传感电位器;7—放大器;8—电液伺服 阀 在控制系统中,将被控制对象的输出信号回输到系统的输入端,并与给定值进行比较而形成偏差信号以产生对被控对象的控制作用,这种控制形式称之为反馈控制。反馈信号与给定信号符号相反,即总是形成差值,这种反馈称之为负反馈。用负反馈产生的偏差信号进行调节,是反馈控制的基本特征。而对图1所示的实例中,电位器6就是反馈装置,偏差信号就是给定信号电压与反馈信号电压在放大器输入端产生的△u。 图2 给出对应图1实例的方框图。控制系统常用方框图表示系统各元件之间的联系。上图方框中用文字表示了各元件,后面将介绍方框图采用数学公式的表达形式。 液压伺服系统的组成 液压伺服系统的组成 由上面举例可见,液压伺服系统是由以下一些基本元件组成;
swdm20型多功能全液压旋挖钻机性能介绍 a. 钻桅变幅油缸下铰座与动臂的上铰轴同轴,结构简单,拆装方便,便于维修; b. 钻机运输或转场组装时,利用自身的动力和结构,不需要吊车辅助即可在主钻桅小于90°倾角(钻桅处于后倾状态)时实现下钻桅与主钻桅的自装自卸功能(已申报专利),降低了客户的使用成本,并提高了设备装卸时的稳定性。 c. 通过钻桅、动臂、三角架、各变幅油缸及连杆各铰接点的优化设计,增大了钻桅的驱动力,确保了动力头处于任意钻桅位置都能实现钻桅的平举和变幅(已申报专利)。确保该机工作半径大,适应能力强。 (4)主、副卷扬。 主卷扬采用大直径卷筒结构,60米钻孔深度的钢丝绳在卷筒上为单层缠绕,有效地解决了多层缠绕结构钢丝绳之间的相互挤压磨损,确保了钢丝绳的使用寿命。卷扬减速机为力士乐公司的gft系列。主卷扬可实现双速控制,且有自由下放功能,以适应钻进的需要。控制方式为液压先导控制,主副卷扬配有压绳器。 (5)动力头。 动力头主要包括托架和驱动器。如图5所示,由液压泵供油带动液压马达,经减速机和驱动齿轮后,以低速大扭矩的形式通过套管式驱动轴传递给钻杆。对机锁和摩阻两种钻杆均适用。 (6)钻杆。 一般选用国内质量可靠的配套。可根据用户需要选用机锁和摩阻两种结构形式的钻杆。也可根据用户要求配套选用进口钻杆。 (7)钻头。 钻头的结构形式很复杂,种类很多。根据施工地质不同,适用的钻头结构也千差万别,因此,旋挖钻头一般应根据工程的地质情况进行选用。该机可配用短螺旋钻头、回转斗钻头,岩心钻头,岩心回转斗等各种规格的钻头。 (8)发动机系统。 发动机系统为整个机器提供动力。该钻机发动机选用国际知名品牌,原装进口美国cummins c330型,246kw/2100rpm。 (9)液压系统。 该旋挖钻机所有功能均由液压驱动。液压系统包括三个部分: a. 下车部分:主要包括中心回转体及其以下部分,可实现行走及履带伸缩; b. 上车部分。可实现桅杆变幅、桅杆角度调整、钻进加压、主、副卷扬、上车回转以及动力头的旋转等功能; c. 先导控制系统:对上述两个系统的主阀进行先导操纵,使操纵轻便、灵活、平稳。液压泵、液压马达和液压阀等主要液压元件采用国际知名品牌厂家生产的进口产品,确保产品性能可靠。 3 swdm-20型旋挖钻机主要性能参数与性能特点 swdm-20型旋挖钻机主要性能参数如下: (1)进口康明斯m11-c330电喷涡轮增压中冷发动机,具有超凡的动力性和
伺服电机原理 一、交流伺服电动机 交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似.其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。 交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。 交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。 交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点: 1、起动转矩大 由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。 2、运行范围较广 3、无自转现象
典型电---气比例阀、伺服阀的工作原理 电---气比例阀和伺服阀按其功能可分为压力式和流量式两种。压力式比例/伺服阀将输给的电信号线性地转换为气体压力;流量式比例/伺服阀将输给的电信号转换为气体流量。由于气体的可压缩性,使气缸或气马达等执行元件的运动速度不仅取决于气体流量。还取决于执行元件的负载大小。因此精确地控制气体流量往往是不必要的。单纯的压力式或流量式比例/伺服阀应用不多,往往是压力和流量结合在一起应用更为广泛。 电---气比例阀和伺服阀主要由电---机械转换器和气动放大器组成。但随着近年来廉价的电子集成电路和各种检测器件的大量出现,在1电---气比例/伺服阀中越来越多地采用了电反馈方法,这也大大提高了比例/伺服阀的性能。电---气比例/伺服阀可采用的反馈控制方式,阀内就增加了位移或压力检测器件,有的还集成有控制放大器。 一、滑阀式电---气方向比例阀 流量式四通或五通比例控制阀可以控制气动执行元件在两个方向上的运动速度,这类阀也称方向比例阀。图示即为这类阀的结构原理图。它由直流比例电磁铁1、阀芯2、阀套3、阀体4、位移传感器5和控制放大器6等赞成。位移传感器采用电感式原理,它的作用是将比例电磁铁的衔铁位移线性地转换为电压信号输出。控制放大器的主要作用是: 1)将位移传感器的输出信号进行放大; 2)比较指令信号Ue和位移反馈信号U f U; 3)放大,转换为电流信号I输出。此外,为了改善比例阀的性能,控制放大器还含有对反馈信号 Uf的处理环节。比如状态反馈控制和PID调节等。 带位置反馈的滑阀式方向比例阀,其工作原理是:在初始状态,控制放大器的指令信号UF=0,阀芯处于零位,此时气源口P与A、B两端输出口同时被切断,A、B两口与排气口也切断,无流量输出;同时位移传Uf=0。若阀芯受到某种干扰而偏离调定的零位时,位移传感器将输出一定的电压Uf,控制放 放大后输出给电流比例电磁铁,电磁铁产生的推力迫使阀芯回到零位。若指令Ue>0,则 电压差U增大,使控制放大器的输出电流增大,比例电磁铁的输出推力也增大,推动阀芯右移。而阀芯的右移又引起反馈电压Uf的增大,直至Uf与指令电压Ue基本相等,阀芯达到力平衡。此时。
一、交流伺服电机结构图 二、原理 交流伺服电机在定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。
交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无"自转"现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。 交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。 交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点: 1、起动转矩大, 由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。 2、运行范围较广. 3、无自转现象) 正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。当伺服电动机失去控制电压后,它处于单相运行状态,由于转子电阻大,定子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线)交流伺服电动机的输出功率一般是0.1-100W。当电源频率为50Hz,电压有36V、110V、220、380V;当电源频率为400Hz,电压有20V、26V、36V、115V等多种。 交流伺服电动机运行平稳、噪音小。但控制特性是非线性,并且由于转子电阻大,损耗大,效率低,因此与同容量直流伺服电动机相比,体积大、重量重,所以只适用于0.5-100W 的小功率控制系统。
伺服驱动器的工作原理 随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用全数字式交流伺服电机作为执行电动机。在控制方式上用脉冲串和方向信号实现。 一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。 速度控制和转矩控制都是用模拟量来控制的。位置控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求,满足何种运动功能来选择。 如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。 如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位控制器有比较好的死循环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。 对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度
方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,而且,这时完全不需要使用伺服电机。换一种说法是: 1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V 对应5Nm的话,当外部模拟量设定为5V时电机轴输出为2.5Nm:如果电机轴负载低于2.5Nm时电机正转,外部负载等于2.5Nm时电机不转,大于2.5Nm时电机反转(通常在有重力负载情况下产生)。可以通过实时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。 2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。应用领域如数控机床、印刷机械等等。 3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行
伺服电机工作原理及和步进电机の区别 2010-03-30 17:14 伺服电机内部の转子是永磁铁,驱动器控制のU/V/W三相电形成电磁场,转子在此磁场の作用下转动,同时电机自带の编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动の角度。伺服电机の精度决定于编码器の精度(线数)。 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到の电信号转换成电动机轴上の角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩の增加而匀速下降.。 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制滚珠丝杆,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。永磁交流伺服电动机20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术の发展,永磁交流伺服驱动技术有了突出の发展,各国著名电气厂商相继推出各自の交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统の主要发展方向,使原来の直流伺服面临被淘汰の危机。90年代以后,世界各国已经商品化了の交流伺服系统是采用全数字控制の正弦波电动机伺服驱动。交流伺服驱动装置在传动领域の发展日新月异。 永磁交流伺服电动机同直流伺服电动机比较,主要优点有:⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。⑵定子绕组散热比较方便。⑶惯量小,易于提高系统の快速性波纹管联轴器。⑷适应于高速大力矩工作状态。⑸同功率下有较小の体积和重量。 伺服和步进电机 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应の角度,从而实现位移,因为,伺服电机本身具备发出脉冲の功能,所以伺服电机每旋转一个角度,都会发出对应数量の脉冲,这样,和伺服电机接受の脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确の控制电机の转动,从而实现精确の定位,可以达到0.001mm。 步进电机是一种离散运动の装置,它和现代数字控制技术有着本质の联系。在目前国内の数字控制系统中,步进电机の应用十分广泛。随着全数字式交流伺服系统の出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制の发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号)弹性联轴器,但在使用性能和应用场合上存在着较大の差异。现就二者の使用性能作一比较。 一、控制精度不同 两相混合式步进电机步距角一般为 3.6°、 1.8°,五相混合式步进电机步距角一般为
液压伺服工作原理 1.1 液压伺服系统以其响应速度快、负载刚度大、控制功率大等独特的优点在工业控制中得到了广泛的应用。 电液伺服系统通过使用电液伺服阀,将小功率的电信号转换为大功率的液压动力,从而实现了一些重型机械设备的伺服控制。 液压伺服系统是使系统的输出量,如位移、速度或力等,能自动地、快速而准确地跟随输入量的变化而变化,与此同时,输出功率被大幅度地放大。液压伺服系统的工作原理可由图1来说明。 图1所示为一个对管道流量进行连续控制的电液伺服系统。在大口径流体管道1中,阀板2的转角θ变化会产生节流作用而起到调节流量qT的作用。阀板转动由液压缸带动齿轮、齿条来实现。这个系统的输入量是电位器5的给定值 x i 。对应给定值x i ,有一定的电压输给放大器7,放大器将电压信号转换为电流 信号加到伺服阀的电磁线圈上,使阀芯相应地产生一定的开口量x v 。阀开口x v 使液压油进入液压缸上腔,推动液压缸向下移动。液压缸下腔的油液则经伺服阀流回油箱。液压缸的向下移动,使齿轮、齿条带动阀板产生偏转。同时,液压缸 活塞杆也带动电位器6的触点下移x p 。当x p 所对应的电压与x i 所对应的电压相 等时,两电压之差为零。这时,放大器的输出电流亦为零,伺服阀关闭,液压缸带动的阀板停在相应的qT位置。 图1 管道流量(或静压力)的电液伺服系统 1—流体管道;2—阀板;3—齿轮、齿条;4—液压缸;5—给定电位器;6—流量传感电位器;7—放大器;8—电液伺服阀 在控制系统中,将被控制对象的输出信号回输到系统的输入端,并与给定值进行比较而形成偏差信号以产生对被控对象的控制作用,这种控制形式称之为反
旋挖钻机介绍 旋挖钻机适用于砂土、粘性土、粉质土等土层施工,在灌注桩、连续墙、基础加固等多种地基基础施工中得到广泛应用,主要用于市政、公路桥梁、工业和民用建筑等基础施工中。旋挖钻机的额定功率一般为125-450kW,动力输出扭矩为120-400kNm,最大成孔直径可达1.5-3m,最大成孔深度为60-90m,可以满足各类大型基础施工的要求。 1 旋挖钻机类型 选择旋挖钻机的原则是满足用户目前的主要工程需求,兼顾今后可能发生的工程需求。旋挖钻机根据其扭矩、发动机功率、钻孔直径、钻孔深度及钻机整机质量可以分为3种类型:小型机——钻孔直径0.5-1m,钻孔深度40m左右,整机质量40t左右;中型机——钻孔直径0.8-1.8m,钻孔深度60m左右,整机质量65t左右;大型机——钻孔直径1-2.5m,钻孔深度80m。 2 旋挖钻机产品 2.1国外产品 中外研制生产旋挖钻机的公司主要有宝峨(BAUER)、士力(SOILMEC)、意马(IMT)、迈特(MAIT)、卡萨格兰特、(CASAGRANDE)、DELMAG、MGAF、英格索兰、利渤海尔以及日立—住友等公司。主要产品情况见表1。
表1 国外公司的旋挖钻机 生产商型号发动机功率 kW 动力头扭矩 kNm 钻孔直径 m 宝峨公司BG9 125 93.4 1.3 BG9H 122 93 1.3 BG14 206 140 1.3 BG15 160 145 1.5 BG22 180 220 1.9 BG22H 190 220 1.5 BG22S 222 220 2.2 BG30 206 367 2.2 BG30(H)268 367 2.2 BG30(S)222 367 2.2 BG40 297 367 2.2 BG50 445 280 3.0 意马公司AF6 79 63 1.5 AF10 112.5 102 1.5 AF120 170 120 1.5 AF150 172.5 156 1.8 AF180 205 185 2.0 AF200 240 220 2.0 士力公司R312 135 113 1.5 412 158 109 1.5 412HD 158 108 1.5 518 220 157 1.5 618 229 172 2.0 622 300 200 2.5 CM35 80 60 0.8 CM40 132 100 1.5 CM40HD 139 120 1.5 CM48 136 88.5 0.95 迈特公司E-12 97 120 1.2 FUNDA 135 90 1.0 HR45 62 46 1.2 HR110 135 130 1.5 HR130/60 173 131.4 1.5 HR130 173 130 1.5 HR160 246 180 1.8 HR180/24 246 180 1.8 HR200 259 200 2.0 HR240 333 240 3.0
https://www.doczj.com/doc/dc4938551.html,/ebook/2007/B10036766/5.html https://www.doczj.com/doc/dc4938551.html,/ebook/2007/B10036766/5.html https://www.doczj.com/doc/dc4938551.html, 伺服电机的工作原理2008-04-10 10:42伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降.。 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制滚珠丝杆,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。永磁交流伺服电动机20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。 永磁交流伺服电动机同直流伺服电动机比较,主要优点有:⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。⑵定子绕组散热比较方便。⑶惯量小,易于提高系统的快速性波纹管联轴器。⑷适应于高速大力矩工作状态。⑸同功率下有较小的体积和重量。 伺服和步进电机 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。 步进电机是一种离散运动的装置,它和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号)弹性联轴器,但
多功能全液压潜孔钻机技术参数与工作原理 多功能全液压潜孔钻机设备是消化吸收国产液压锚固钻机及隧道管棚液压钻机的先进技术,并结合国内实际情况而设计制造的性能优异的履带式多功能全液压钻机,配套液压动力头是原德国KLEMM公司生产的HD系列进口原装动力头,张家口市宣化恒通鑫钻孔机械有限公司是国内唯一生产此钻机的厂家。钻机的钻架可在三个平面内调节,特别设计的摆动机构使得钻架在水平和垂直方面均能方便地定位。另外钻臂还可以±15度轴向摆动旋转,这些特性使钻机在所有的工况下均可施工。钻HTYM808多功能全液压钻机应用领域一、铁路隧道探测及注浆孔钻进(风化岩及完整基岩上钻进)⒈如果岩石普氏硬度f≤10,利用进口动力头回转及冲击,需配专用快换钎杆及钎头,采用高压水排渣,亦可以利用进口动力头回转及冲击,实现一边钻孔一边注浆,防止渗漏水涌出。⒉如果岩石普氏硬度f>10,利用进口动力头回转,冲击利用高压气动潜孔锤进行潜孔钻进;同时把高压水通过冲击器注入孔内进行除尘。二、铁路隧道管棚孔钻进(覆盖层跟管钻进)⒈如果管棚孔深度≤30米,且砂卵石比较小,可利用进口动力头回转实现单作用双回转,即内钻杆、套管同时回转及冲击,采用高压水排渣,降低施工成本。⒉如果管棚孔深度>30米,可利用进口动力头实现内钻杆、套管同时回转,冲击利用中高压气动潜孔锤配偏心/对心扩孔钻具实现,把高压水通过冲击器注入孔内。三、城市高层建筑基坑的锚索孔钻进(覆盖层跟管钻进)施工工艺同铁路隧道管棚钻进工艺一样。四、地源热泵及水电围堰注浆孔的钻进 1. 如果覆盖层深度≤30米,且砂卵石比较小,可采用进口动力头回转实现单作用双回转,即内钻杆、套管同时回转和冲击,采用高压水排渣,起拔套管效率高,降低施工成本。在基岩上利用中高压气动潜孔锤空气钻进,钻进深度达250米。2. 如果覆盖层深度>30米,或砂卵石比较大,可利用进口动力头实现内钻杆、套管同时回转,冲击利用中高压气动潜孔锤配偏心/对心扩孔钻具实现。在基岩上利用中高压气动潜孔冲击器钻进,钻孔深度达250米。五、水井等大孔径基岩钻孔领域应用钻孔直径Φ165—Φ400mm,尤其适用于水井孔钻进,配置:DHD360、DHD380、DHD310、DHD112中高压系列潜孔冲击器,亦可以进行多方位炮孔钻凿作业。HTYM808多功能全液压钻机主要技术参数钻孔直径(风压0.8-1.0Mpa)φ90mm-φ130mm ,钻孔深度40米钻孔直径(风压1.4-1.7Mpa)φ90mm-φ200mm ,钻孔深度80-50米钻孔直径(风压1.8-2.46Mpa)φ200mm-φ350mm ,钻孔深度50-30米用液压凿岩机(岩石普氏硬度f=5-10)φ64mm-φ105mm, 钻孔深度40-20米在覆盖层用液压顶驱动力头打管棚φ150mm,钻孔深度30米用高压冲击器在岩石上钻孔φ80mm-φ140mm,水平孔钻孔深度100米;垂直孔钻孔深度100米;掘进速度大于30m/h 用高压冲击器打管棚覆盖层φ150mm-φ300mm,钻孔深度60-30米液压顶驱动力头德国原装进口HD系列动力头回转扭矩及转速5500 N.M 86 r/min 11000N.M 43 r/min 凿岩机的最高冲击频率2400次/min 工作压力16-20 MPa 发动机功率112 KW(东风康明斯柴油发动机)钻具一次推进行程3500mm 推进力45 KN 提升力95 KN 钻具慢推进速度0-11.7m/min 钻具慢提升速度5.3 m/min 钻具快推进速度38 m/min 钻具快提升速度17.9m/min,最大提升速度23.2m/min 工作压力可调至25Mpa 液压油箱容积360L 钻机牵引力73KN 行车速度1.8km/h 先导阀、多路阀进口爬坡能力25度除尘方式水除尘钻杆拆卸装置钻机自带液压钳子整机重量14吨可钻凿水平孔最低距地面0.5米,最高距地面3.4米。钻机的用途可打管棚、锚固孔、注浆孔、地源热泵孔注浆类型打完孔后注浆边打孔边注浆 CM351潜孔钻机外形及工作原理
伺服驱动器的工作原理 。速度控制和转矩控制都是用模拟量来控制的。位置控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求,满足何种运动功能来选择。如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位控制器有比较好的死循环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,而且,这时完全不需要使用伺服电机。换一种说法是:
1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,当外部模拟量设定为5V时电机轴输出为 2、5Nm:如果电机轴负载低于 2、5Nm时电机正转,外部负载等于 2、5Nm时电机不转,大于 2、5Nm时电机反转(通常在有重力负载情况下产生)。可以通过实时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。 2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。应用领域如数控机床、印刷机械等等。 3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位回馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由
伺服电机的工作原理图? 伺服电机工作原理——伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。 永磁交流伺服系统具有以下等优点:(1)电动机无电刷和换向器,工作可靠,维护和保养简单;(2)定子绕组散热快;(3)惯量小,易提高系统的快速性;(4)适应于高速大力矩工作状态;(5)相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。 永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。现在,高性能的伺服系统,大多数采用永磁交流伺服系统其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。伺服驱动器有两部分组成:驱动器硬件和控制算法。控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是在技术垄断的核心。 2 交流永磁伺服系统的基本结构 交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。我们的交流永磁同步驱动器其集先进的控制技术和控制策略为一体,使其非常适用于高精度、高性能要求的伺服驱动领域,还体现了强大的智能化、柔性化是传统的驱动系统所不可比拟的。 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,其优点是可以实现比较复杂的控制算法,事项数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。
伺服电机的工作原理图 伺服电机工作原理——伺服电机内部的转子是永磁铁,驱动器控制的U/V/W 三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。 1、永磁交流伺服系统具有以下等优点: (1)电动机无电刷和换向器,工作可靠,维护和保养简单; (2)定子绕组散热快; (3)惯量小,易提高系统的快速性; (4)适应于高速大力矩工作状态; (5)相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。 永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。现在,高性能的伺服系统,大多数采用永磁交流伺服系统其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。伺服驱动器有两部分组成:驱动器硬件和控制算法。控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是在技术垄断的核心。 2、交流永磁伺服系统的基本结构 交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。我们的交流永磁同步驱动器其集先进的控制技术和控制策略为一体,使其非常适用于高精度、高性能要求的伺服驱动领域,还体现了强大的智能化、柔性化是传统的驱动系统所不可比拟的。 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,其优点是可以实现比较复杂的控制算法,事项数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。