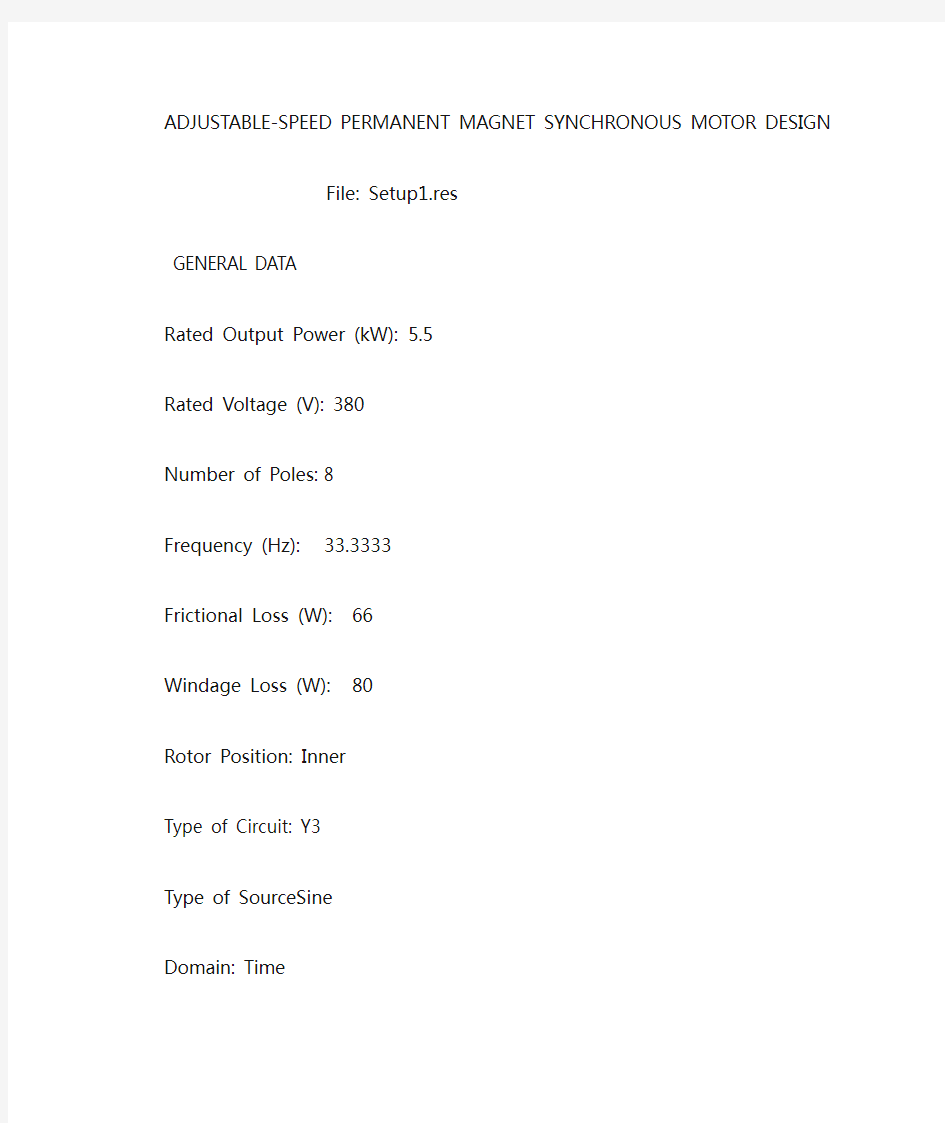
ADJUSTABLE-SPEED PERMANENT MAGNET SYNCHRONOUS MOTOR DESIGN
File: Setup1.res
GENERAL DATA
Rated Output Power (kW): 5.5
Rated Voltage (V): 380
Number of Poles: 8
Frequency (Hz): 33.3333
Frictional Loss (W): 66
Windage Loss (W): 80
Rotor Position: Inner
Type of Circuit: Y3
Type of Source: Sine
Domain: Time
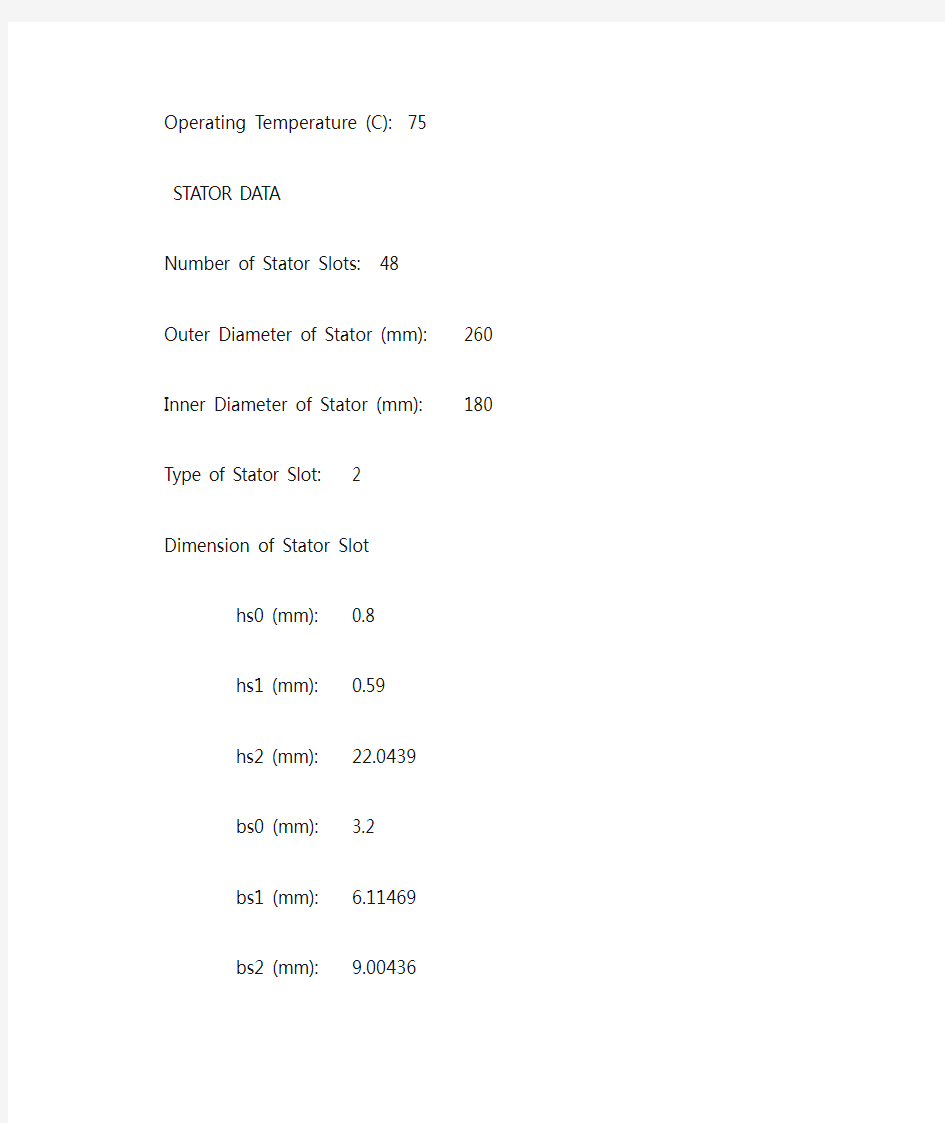
Operating Temperature (C): 75
STATOR DATA
Number of Stator Slots: 48
Outer Diameter of Stator (mm): 260
Inner Diameter of Stator (mm): 180
Type of Stator Slot: 2
Dimension of Stator Slot
hs0 (mm): 0.8
hs1 (mm): 0.59
hs2 (mm): 22.0439
bs0 (mm): 3.2
bs1 (mm): 6.11469
bs2 (mm): 9.00436
Top Tooth Width (mm): 5.85092
Bottom Tooth Width (mm): 5.85092
Skew Width (Number of Slots): 1
Length of Stator Core (mm): 60
Stacking Factor of Stator Core: 0.99
Type of Steel: DW465_50
Slot Insulation Thickness (mm): 0.3
Layer Insulation Thickness (mm): 0
End Length Adjustment (mm): 0
Number of Parallel Branches: 1
Number of Conductors per Slot: 58
Type of Coils: 11
Average Coil Pitch: 5
Number of Wires per Conductor: 1
Wire Diameter (mm): 1.45
Wire Wrap Thickness (mm): 0
Slot Area (mm^2): 203.789
Net Slot Area (mm^2): 169.299
Limited Slot Fill Factor (%): 75
Stator Slot Fill Factor (%): 72.0293
Coil Half-Turn Length (mm): 150.3
Wire Resistivity (ohm.mm^2/m): 0.0217
ROTOR DATA
Minimum Air Gap (mm): 1.325
Inner Diameter (mm): 102.35
Length of Rotor (mm): 60
Stacking Factor of Iron Core: 0.95
Type of Steel: DW360_50
Polar Arc Radius (mm): 88.675 Mechanical Pole Embrace: 0.78
Electrical Pole Embrace: 0.779791
Max. Thickness of Magnet (mm): 3.5 Width of Magnet (mm): 53.2512
Type of Magnet: NTP264H
Type of Rotor: 1
Magnetic Shaft: Yes
PERMANENT MAGNET DATA
Residual Flux Density (Tesla): 1.08
Coercive Force (kA/m): 822.5
Maximum Energy Density (kJ/m^3): 222.075 Relative Recoil Permeability: 1.04494 Demagnetized Flux Density (Tesla): 0 Recoil Residual Flux Density (Tesla): 1.08 Recoil Coercive Force (kA/m): 822.5
MATERIAL CONSUMPTION
Armature Wire Density (kg/m^3): 8900 Permanent Magnet Density (kg/m^3): 7550 Armature Core Steel Density (kg/m^3): 7700 Rotor Core Steel Density (kg/m^3): 7650
Armature Copper Weight (kg): 6.14956 Permanent Magnet Weight (kg): 0.675438 Armature Core Steel Weight (kg): 8.1707 Rotor Core Steel Weight (kg): 6.35068
Total Net Weight (kg): 21.3464
Armature Core Steel Consumption (kg): 31.6365 Rotor Core Steel Consumption (kg): 13.1034
STEADY STATE PARAMETERS
Stator Winding Factor: 0.965926
D-Axis Reactive Reactance Xad (ohm): 6.95326
Q-Axis Reactive Reactance Xaq (ohm): 6.95326
D-Axis Reactance X1+Xad (ohm): 9.89938
Q-Axis Reactance X1+Xaq (ohm): 9.89938 Armature Leakage Reactance X1 (ohm): 2.94612 Zero-Sequence Reactance X0 (ohm): 2.94612 Armature Phase Resistance R1 (ohm): 1.83291 Armature Phase Resistance at 20C (ohm): 1.50772
NO-LOAD MAGNETIC DATA
Stator-Teeth Flux Density (Tesla): 1.56684
Stator-Yoke Flux Density (Tesla): 1.48222
Rotor-Yoke Flux Density (Tesla): 0.616243
Air-Gap Flux Density (Tesla): 0.691678
Magnet Flux Density (Tesla): 0.747576
Stator-Teeth By-Pass Factor: 0.00195752
Stator-Yoke By-Pass Factor: 8.779e-006
Rotor-Yoke By-Pass Factor: 7.58386e-006
Stator-Teeth Ampere Turns (A.T): 44.7767
Stator-Yoke Ampere Turns (A.T): 13.8507
Rotor-Yoke Ampere Turns (A.T): 1.40005
Air-Gap Ampere Turns (A.T): 825.85
Magnet Ampere Turns (A.T): -886.08
Leakage-Flux Factor: 1
Correction Factor for Magnetic
Circuit Length of Stator Yoke: 0.325663
Correction Factor for Magnetic
Circuit Length of Rotor Yoke: 0.74007
No-Load Line Current (A): 6.76698
No-Load Input Power (W): 414.215
Cogging Torque (N.m): 9.63676e-012
FULL-LOAD DATA
Maximum Line Induced Voltage (V): 378.34
Root-Mean-Square Line Current (A): 12.3632
Root-Mean-Square Phase Current (A): 12.3632
Armature Thermal Load (A^2/mm^3): 455.692
Specific Electric Loading (A/mm): 60.865
Armature Current Density (A/mm^2): 7.48693
Frictional and Windage Loss (W): 146
Iron-Core Loss (W): 16.0901
Armature Copper Loss (W): 840.451
Total Loss (W): 1002.54
Output Power (W): 5500.96
Input Power (W): 6503.5
Efficiency (%): 84.5846
Synchronous Speed (rpm): 500
Rated Torque (N.m): 105.061
Torque Angle (degree): 32.6524
Maximum Output Power (W): 8681.92
Torque Constant KT (Nm/A): 5.61365
WINDING ARRANGEMENT
The 3-phase, 1-layer winding can be arranged in 12 slots as below: AAZZBBXXCCYY
Angle per slot (elec. degrees): 30
Phase-A axis (elec. degrees): 105
First slot center (elec. degrees): 0
TRANSIENT FEA INPUT DATA
For Armature Winding:
Number of Turns: 464
Parallel Branches: 1
Terminal Resistance (ohm): 1.83291
End Leakage Inductance (H): 0.00435884
2D Equivalent Value:
Equivalent Model Depth (mm): 60
Equivalent Stator Stacking Factor: 0.99 Equivalent Rotor Stacking Factor: 0.95 Equivalent Br (Tesla): 1.08
Equivalent Hc (kA/m): 822.5
Estimated Rotor Inertial Moment (kg m^2): 0.0454538
弧形永磁同步电机设计与优化 实验结果表明电机的力矩波动从原来的4%下降到1.8%,证明该种方法的有效性。关键词:弧形永磁同步电机;边端力矩;齿槽力矩;有限元分析;力矩波动 DOI:10.15938/j.emc.2015.07.016 中图分类号:TN957;TN273+.3 文献标志码:A 文章编号:1007-449X(2015)07-0106-05 0.引言 对于一些超大型精密测量设备,如望远镜、测量雷达、精密机床,转台的尺寸都在10m左右,传统的传动方式已经不能满足实际应用需求。主要体现在如下方面:采用蜗轮蜗杆传动方式时蜗轮的尺寸难以做得很大,而且大尺寸蜗轮精度难以得到保证,对于大型测量设备而言,传动惯量一般都很大,常常使蜗轮部分的惯量难以匹配与其啮合的蜗杆部分的惯量。当设备制动时,蜗杆副的不可逆转特性会产生很大的冲击,若采用在蜗杆轴上加重量的办法来匹配惯量消除冲击,不仅会使伺服系统的机电时间常数增大,而且会延长起动和制动时间,同时也降低了伺服系统的跟踪性能。摩擦传动虽然克服了蜗轮蜗杆传动的弱点,但其存在传动刚度差,低速爬行和滑移的缺点。低速爬行和滑移会直接影响设备的运动稳定性和传动精度,齿轮传动与蜗轮蜗杆传动类似,都属于啮合传动,同样存在反向间隙、较高齿面接触应力、高频齿形误差等问题。对于力矩电机直接传动方式而言,普通的旋转电机已经不能满足大型设备应用需求,如果设计超大型的旋转电机,将给电机的加工、运输、安装都带来巨大的困难。 基于以上原因,本世纪初,国外率先在大型光学望远镜上应用了一种基于弧形永磁同步电机
拼接的传动技术。这项传动技术已经成功应用在了8.2 m的VLT望远镜和10.4 m的望远镜上。整个拼接电机的转子是由多个扇形结构组成,整个电机定子由多块弧形定子组成,每块定子和转子可以视为一台单元电机,可以单独运转。从电机结构上分类,该种电机属于直线电机,从电机性质上分类,该种电机属于永磁同步电机。整台电机可以很方便地加工、安装和拆卸,即使单块定子出现故障,仍然不影响整台电机的运转。但是该种电机存在较大的力矩波动,力矩波动会直接影响到设备的定位和跟踪精度,因此必须采取有效措施加以优化。造成电机力矩波动的因素有很多,主要包括:反电动势谐波、电机磁阻力矩等。对于弧形永磁同步电机,造成电机磁阻力矩的主要因素包括电机的边端力矩和齿槽力矩。电机的边端力矩是由于电机的铁心长度有限,未能构成闭合磁路造成的,电机的齿槽力矩是由电机的齿槽拓扑结构造成的。本文将针对弧形电机的力矩波动采取有效措施进行优化。 感谢您的阅读!
基于SVPWM的永磁同步电机控制系统的仿真 随着电动机在社会生产中的广泛应用,由于永磁同步电机具有结构简单、体积小、效率高、转矩电流比高、转动惯量低,易于散热及维护等优点,特别是随着永磁材料价格的下降、材料的磁性能的提高、以及新型的永磁材料的出现,在中小功率、高精度、高可靠性、宽调速围的伺服控制系统中,永磁同步电动机引起了众多研究与开发人员的青睐,其应用领域逐步推广,尤其在航空航天、数控机床、加工中心、机器人等场合已获得广泛的应用。我国制作永磁电机永磁材料的稀土资源丰富,稀土资占全世界的80%以上,发展永磁电机具有广阔的前景。 第一章永磁同步电机的矢量控制原理 1.1 永磁同步电机控制中应用的坐标系 交流电机的数学模型具有高阶次,多变量耦合,非线性等特征,难以直接应用于系统的设计和控制,与直流电机单变量,自然解耦和线性的数学模型相比较,交流电机显得异常复杂。因此需要通过适当的转换,将交流电机的控制变换为类似直流电机的控制将大大简化交流电机控制的复杂程度。 永磁同步电机矢量控制的基本思想是把交流电机当成直流电机来控制,即模拟直流电机的控制特点进行永磁同步电机的控制。为简化感应电机模型,可将电机三相绕组电流产生的磁动势按平面矢量的叠加原理进行合成和分解,使得能够用两相正交绕组来等效实际电动机的三相绕组。由于两相绕组的正交性,变量之间的耦合大大减小。 1.1.1系统中的坐标系 1)三相定子坐标系(U-V-W坐标系) 其中三相交流电机绕组轴线分别为U、V、W,彼此之间互差120度空间电角度,构成了一个U-V-W三相坐标系。空间任意一矢量在三个坐标上的投
影代表了该矢量在三个绕组上的分量。 2)两相定子坐标系(α-β坐标系) 两相对称绕组通以两相对称电流也能产生旋转磁场。对于空间的任意一矢量,数学描述时习惯采用两相直角坐标系来描述,所以定义一个两相静止坐标系,即α-β坐标系。它的轴α和三相定子坐标系的A轴重合,β轴逆时针超前α轴90度空间电角度。由于α轴固定在定子A相绕组轴线上,所以α-β坐标系也是静止坐标系。 3)转子坐标系(d-q坐标系) 转子坐标系d轴位于转子磁链轴线上,q轴逆时针超前d轴90度空间电角度,该坐标系和转子一起在空间上以转子角速度旋转,故为旋转坐标系。对于同步电动机,d轴是转子磁极的轴线。 矢量控制中用到的变换有:将三相平面坐标系向两相平面直角坐标系的转换(Clarke 变换)和将两相静止直角坐标系向两相旋转直角坐标系的变换(Park变换)。 1.1.2 由三项平面坐标系向两相平面坐标系(Clarke变换) 三相同步电动机的集中绕组U、V、W的轴线在与转子垂直的平面分布如上图所示,轴线依次相差120°,可将每相绕组在气隙中产生的磁势分别记为:Fu、Fv、Fw。由于Fu、Fv、Fw不会在轴向上产生分量,所以可以把气隙的磁场简化为一个二维的平面场。简单起见,可以U为α轴,由α起逆时针旋转90°作β轴,建立起二维坐标系,用此两相坐标系(α-β)产生的磁动势来等效三相静止坐标系(U-V-W)产生的磁动势。如图1.1所示。
1.课题背景及意义 1.1课题研究背景、目的及意义 近年来,随着电力电子技术、微电子技术、微型计算机技术、传感器技术、稀土永磁材料与电动机控制理论的发展,交流伺服控制技术有了长足的进步,交流伺服系统将逐步取代直流伺服系统,借助于计算机技术、现代控制理论的发展,人们可以构成高精度、快速响应的交流伺服驱动系统。因此,近年来,世界各国在高精度速度和位置控制场合,己经由交流电力传动取代液压和直流传动[1][2]。 二十世纪八十年代以来,随着价格低廉的钕铁硼(REFEB)永磁材料的出现,使永磁同步电机得到了很大的发展,世界各国(以德国和日本为首)掀起了一股研制和生产永磁同步电机及其伺服控制器的热潮,在数控机床、工业机器人等小功率应用场合,永磁同步电机伺服系统是主要的发展趋势。永磁同步电机的控制技术将逐渐走向成熟并日趋完善[3]。以往同步电机的概念和应用范围己被当今的永磁同步电机大大扩展。可以毫不夸张地说,永磁同步电机已在从小到大,从一般控制驱动到高精度的伺服驱动,从人们日常生活到各种高精尖的科技领域作为最主要的驱动电机出现,而且前景会越来越明显。 由于永磁同步电机具有结构简单、体积小、效率高、转矩电流比高、转动惯量低,易于散热及维护等优点,特别是随着永磁材料价格的下降、材料的磁性能的提高、以及新型的永磁材料的出现,在中小功率、高精度、高可靠性、宽调速范围的伺服控制系统中,永磁同步电动机引起了众多研究与开发人员的青睐,其应用领域逐步推广,尤其在航空航天、数控机床、加工中心、机器人等场合获得广泛的应用[4][5]。 尽管永磁同步电动机的控制技术得到了很大的发展,各种控制技术的应用 - 1 -
永磁同步电机控制系统仿真模型的建立与 实现
电机的控制 本文设计的电机效率特性如图 转矩(Nm) 转速(rpm) 异步电机效率特性 PMSM 电机效率特性 本文设计的电动汽车电机采用SVPWM 控制技术是一种先进的控制技术,它是以“磁链跟踪控制”为目标,能明显减少逆变器输出电流的谐波成份及电机的谐波损耗,能有效降低脉动转矩,适用于各种交流电动机调速,有替代传统SPWM 的趋势[2]。 基于上述原因,本文结合0=d i 和SVPWM 控制技术设计PMSM 双闭环PI 调速控制。其中,内环为电流环[3],外环为速度环,根据经典的PID 控制设计理论,将内环按典型Ⅰ系统,外环按典型Ⅱ系统设计PI 控制器参数[4]。 1. PMSM 控制系统总模型 首先给出PMSM 的交流伺服系统矢量控制框图。忽略粘性阻尼系数的影响, PMSM 的状态方程可表示为 ??????????-+????????????????????----=??????????J T L u L u i i P J P L R P P L R i i L q d m q d f n f n m n m n m q d ///002/30//ωψψωωω& && (1) 将0=d i 带入上式,有 ???? ??????-+??????????? ??? ??--=????? ?????J T L u L u i J P P L R P i i L q d m q f n f n m n m q d ///02/3/0ωψψωω& && (2) 转 矩 (N m )转速 (n /(m i n )) 效率 转速 (rpm) 转矩 (N m )
研究生设计性实验论文 题目永磁同步电机的建模与仿真 专业机械工程课程名称、代码新能源汽车关键技术年级 2 013级姓名 学号 2131170103 时间 2014 年 1 月 任课教师成绩
永磁同步电机的数学建模与仿真 1. 永磁同步电机建模的流程图 2. 坐标变换的基本原理 电机控制中的坐标系有两种,一种是静止坐标系,一种是旋转坐标系。 (1)三相定子坐标系(A, B, C坐标系) 如图2-3所示,三相交流电机绕组轴线分别为A,B,C,彼此之间互差120度空间电角度,构成了一个A-B-C三相坐标系。空间任意一矢量V在三个坐标上的投影代表了该矢量在三个绕组上的分量。 (2)两相定子坐标系(α一β坐标系) 两相对称绕组通以两相对称电流也能产生旋转磁场。对于空间的任意一矢量,数学描述时习惯采用两相直角坐标系来描述,所以定义一个两相静止坐标系,即α一β坐标系,它的α轴和三相定子坐标系的A轴重合,β轴逆时针超前α轴90度空间电角度。由于轴固定在定子A相绕组轴线上,所以α一β坐标系也是静止坐标系。 (3)转子坐标系(d-q坐标系) 转子坐标系d轴位于转子磁链轴线上,q轴逆时针超前d轴90度空间电角度,该坐标系和转子一起在空间上以转子角速度旋转,故为旋转坐标系。对于同步电动机,d轴是转子磁极的轴线。永磁同步电机的空间矢量图如图2-3所示。 图中A、B、C为定子三相静止坐标系,选定α轴方向与电机定子A相绕组轴线一致,α-β为定子两相静止坐标系,转子坐标系d-q与转子同步旋转;θ为转子磁极d轴相对定子A相绕组或a轴的转子空间位置角;δ为定、转子磁链矢量
s ψ 、f ψ间夹角,即电机功角[8 ,9]。 图1静止两相坐标系到旋转两相坐标系变换 图2 坐标变换矢量图 从三相定子坐标系(A,B,C坐标系)变换到静止坐标系(α,β坐标系)的关系式为: ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? - - - = ? ? ? ? ? ? c b a ? ? ? ? ? β α 2 3 2 1 2 3 2 1 1 3 2 (2-1) 从两相静止坐标系(α,β坐标系)变换到两相旋转坐标系(d,q坐标系)的关系式为: ? ? ? ? ? ? ? ? ? ? ? ? - = ? ? ? ? ? ? β α ? ? θ θ θ θ ? ? cos sin sin cos q d(2-2)从两相旋转坐标系(d,q坐标系)变换到两相静止坐标系(α,β坐标系)的关系式为:
题目1:永磁同步电机双闭环矢量控制系统仿真 一.实验目的 1.加深理解永磁同步电机矢量控制系统的工作原理 2.掌握永磁同步电机驱动系统仿真分析方法 二.实验要求: 1.永磁同步电机双闭环控制系统建模 2.电流控制器设计 3.电流环动态跟随性能仿真实验 4.转速控制器设计 5.转速环抗负载扰动性能仿真实验 6.给出仿真实验结果与理论分析结果的对比及结论 三.预习内容 注:以下所有找不到的器件均可以通过搜索框搜索 Simulink的启动在MATLAB中键入>>Simulink,进入Simulink library,2014版本的可直接点击MATLAB界面上的Simulink library,在Simulink界面上选择File->New->Model。如图1所示: 图1 Simulink界面 在Simulink一级标题下点击source将step(阶跃函数)拖入空白文件作为
转速给定,也可用两个ramp函数相减,使转速缓慢达到预定转速,如图2: 图2 转速给定 在Simulink一级标题下点击Ports & Subsystems 选择Subsystem放入空白文件并双击,删除In1和Out1的连线,如图3: 图3 子函数模块 选择Simulink>Continuous下的integrator、Simulink>discontinuous下的Saturation、Simulink>math operation下的gain和Add,连好线后保存并返回,作为PI调节器,其中saturation可设置上下限为100和-100,如图4:
图4 PI子函数模块设置 此PI调节器输出结果作为Iq的电流给定,同样方法得到一个PI调节器,输出结果作为电压给定,并设置saturation上下限为380和-380,Simulink下math operation选择sum双击并修改第二个“+”为“-”,如图5: 图5 转速和电流反馈PI调节 选择Simulink>Ports & Subsystems下的Subsystem 拖入并双击进入子系统,并添加2个In1和1个Out1如图6: 图6 接口模块 Simulink>math operation 下选择 Trigonometric Function、Product、Subtract、Add加入文件,设置好后保存并退出,作为逆Park变换,如图7:
永磁同步电机的仿真模型 1、永磁同步电机介绍 永磁同步电动机(permanent Magnets synchronous Motor, PMSM),转子采用永磁材料,定子为短距分布式绕组,采用三相正弦波交流电驱动,且定子感应电动势波形呈正弦波"定子绕组通过控制功率管(如IGBT)的不同开关组合,产生旋转磁场跟踪永磁转子的位置,自动地维持与转子的磁场有900的空间夹角,以产生最大的电机转矩"旋转磁场的转速则严格地由永磁转子的转速所决定,PMSM具有直流电动机的特性,有稳定的起动转矩,可以自行起动,并可类似直流电动机对电机进行闭环控制,多用于伺服系统和高性能的调速系统。 永磁同步电动机按转子形状可以分为两类:凸极式永磁同步电机和隐极式永磁同步电机。它们的区别在于转子磁极所在的位置,凸极式永磁同步电机转子磁极是突起在轴上的,其直轴和交轴电感参数不相等"而隐极式永磁同步电机的转子磁极是内置在轴内的,直轴和交轴电感参数相等"凸极式转子具有明显的磁极,定子和转子之间的气隙是不均匀的,因此其磁路与转子的位置有关。 2、永磁同步电机的控制方法 目前对永磁同步电机的控制技术主要有磁场定向矢量控制技术(field orientation control,FOC)与直接转矩控制技术(direct torque control,DTC)。在这里我们使用磁场定向矢量控制技术来建立永磁同步电机的仿真模型。 磁场定向矢量控制技术的核心是在转子旋转坐标系中针对激磁电流id和转矩电流iq分别进行控制,并且采用的是经典的PI线性调节器,系统呈现出良好的线性特性,可以按照经典的线性控制理论进行控制系统的设计,逆变器控制采用了较成熟的SPWM、SVPWM等技术。磁场定向矢量控制技术较成熟,动态、稳态性能较佳,所以得到了广泛的实际应用。该方法摒弃了矢量控制中转子磁场定向的思想,采用定子磁场定向,分别对定子磁链和转矩直接进行控制。直接转矩控制的实现方法是:计算得到磁链和转矩的实际值与参考值之间的偏差,通过滞环比较以及当前定子磁链的空间位置确定控制信号,在离线计算的开关表中选取合适的空间电压矢量,再通过离散的bang-bang 控制方式调制产生PWM 信号,以控制逆变器产生合适的电压和电流驱动电机转动。直接转矩控制摒弃了复杂的空间矢量坐标运算,电机的数学模型得到了简化,控制结构也简单,对电机参数变化不敏感,控制系统的动态性能得到了极大提高。然而有利也有弊,直接转矩控制逆变器的开关频率不固定;转矩、电流脉动大;采样频率也非常高。 下图为磁场定向矢量控制技术的原理图。 FOC控制技术的原理:原理图中涉及到双反馈,第一层反馈为转速反馈:设定电机转速初始值作为给定值,然后与反馈的实际值(位置传感器采集到的位移微分得到)进行比较,得到的差值输入PI控制器进行控制,得到交轴电流iq。同时三相绕组输出的电流iA,iB,iC经过clarke变换和park变化得到iq和id的实际值,分别与给定值进行比较,将比较后的值再进行park转换,得到的结果经过SVPWM技术调制之后输入到逆变器,继而可以驱动三相电机。
基于MTPA的永磁同步电动机矢量控制系统 1 引言 永磁同步电动机由于自身结构的优点,再加上近年来永磁材料的发展,以及电力电子技术和控制技术的发展,永磁同步电动机的应用越来越广泛。而对于凸极式永磁同步电动机,由于具有更高的功率密度和更好的动态性能,在实际应用中越来越受到人们的重视[1]。 高性能的永磁同步电动机控制系统主要采用的矢量控制。交流电机的矢量控制由德国学者blaschke在1971年提出,从而在理论上解决了交流电动机转矩的高性能控制问题。该控制方法首先应用在感应电机上,但很快被移植到同步电机。事实上,在永磁同步电动机上更容易实现矢量控制。因为该类电机在矢量控制过程中不存在感应电机中的转差频率电流而且控制受参数(主要是转子参数)的影响也小。 永磁同步电动机的矢量控制从本质上讲,就是对定子电流在转子旋转坐标系(dq0坐标系)中的两个分量的控制。因为电机电磁转矩的大小取决于上述的两个定子电流分量。对于给定的输出转矩,可以有多个不同的d、q轴电流的控制组合。不同的组合将影响系统的效率、功率因数、电机端电压以及转矩输出能力,由此形成了各种永磁同步电动机的电流控制方法。[2]针对凸极式永磁同步
电动机的特点,本文采用最优转矩控制(mtpa),并用一种更符合实际应用的方法进行实现,并进行了仿真验证。
图1 电流id、iq和转矩te关系曲线 2 永磁同步电动机的数学模型 首先,需要建立永磁同步电动机在转子旋转dq0坐标系下的数学模型,这种模型不仅可用于分析电机的稳态运行性能,还可以用于分析电机的暂态性能。 为建立永磁同步电机的dq0轴系数学模型,首先假设: (1)忽略电动机铁芯的饱和; (2)不计电动机中的涡流和磁滞损耗; (3)转子上没有阻尼绕组; (4)电动机的反电动势是正弦的。 这样,就得到永磁同步电动机dq0轴系下数学模型的电压、磁链和电磁转矩方程,分别如下所示:
第1章绪论 1.1 课题研究的背景 1.1.1 永磁同步电机的发展状况 永磁同步电机出现于20 世纪50 年代。其运行原理与普通电激磁同步电机相同,但它以永磁体替代激磁绕组,使电机结构更为简单,提高了电机运行的可靠性。随着电力电子技术和微型计算机的发展,20 世纪70 年代,永磁同步电机开始应用于交流变频调速系统。20 世纪80 年代,稀土永磁材料的研制取得了突破性的进展,特别是剩磁高、矫顽力大而价格低廉的第三代新型永磁材料钕铁硼(NdFeB)的出现,极大地促进了永磁同步电机调速系统的发展。尤其值得一提的是我国是一个稀土材料的大国,稀土储量和稀土金属的提炼都居世界首位。随着稀土材料技术的不断发展,永磁材料的磁能积已经做的很高,价格也早就满足工业应用的需要,加上矢量控制水平的不断提高,永磁同步电动机越来越显出效率高、功率密度大、调速范围宽、脉动转矩小等高性能的优势。使我国在稀土永磁材料和稀土永磁电机的科研水平都达到了国际先进水平。新型永磁材料在电机上的应用,不仅促进了电机结构、设计方法、制造工艺等方面的改革,而且使永磁同步电机的性能有了质的飞跃,稀土永磁同步电机正向大功率(超高速、大转矩)微型化、智能化、高性能化的方向发展,成为交流调速领域的一个重要分支[1][2]。 由于受到功率开关元件、永磁材料和驱动控制技术发展水平的制约,永磁同步电机最初都采用矩形波波形,在原理和控制方式上基本上与直流电机类似,但这种电机的转矩存在较大的波动。为了克服这一缺点,人们在此基础上又研制出带有位置传感器、逆变器驱动的正弦波永磁同步电机,这就使得永磁同步电机有了更广阔的前景。 1.1.2 永磁同步电机控制系统的发展 随着永磁同步电动机的控制技术的不断发展,各种控制技术的应用也在逐步成熟,比如SVPWM、DTC、SVM-DTC、MRAS等方法都在实际中得到应用。然而,在实际应用中,各种控制策略都存在着一定的不足,如低速特性不够理
关于1.5KW永磁同步电机控制器的初步方案 基于永磁同步电机自身的结构特点,要实现对转速及位置的伺服控制,采用矢量控制算法结合SVPWM技术实现对电机的精确控制,通过改变电机定子电压频率即可实现调速,为防止失步,采用自控方式,利用转子位置检测信号控制逆变器输出电流频率,同时转子位置检测信号作为同步电机的启动以及实现位置伺服功能的组成部分。 矢量控制的基本思想是在三相永磁同步电动机上设法模拟直流 电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分量分解成产生磁通的励磁电流分量id和产生转矩的转矩电流iq分量,并使两分量互相垂直,彼此独立。当给定Id=0,这时根据电机的转矩公式可以得到转矩与主磁通和iq乘积成正比。由于给定Id=0,那么主磁通就基本恒定,这样只要调节电流转矩分量iq就可以像控制直流电动机一样控制永磁同步电机。 根据这一思想,初步设想系统的主要组成部分为:主控制板部分,电源及驱动板部分,输入输出部分。 其中主控制板部分即DSP板,根据控制指令和位置速度传感器以及采集的电压电流信号进行运算,并输出用于控制逆变器部分的控制信号。 电源和驱动板部分主要负责给各个部分供电,并提供给逆变器部分相应的驱动信号,以及将控制信号与主回路的高压部分隔离开。 输入输出部分用来输入控制量,显示实时信息等。
原理框图如下: 基本控制过程:速度给定信号与检测到的转子信号相比较,经过速度控制器的调节,产生定子电流转矩分量Isq_ref,用这个电流量作为电流控制器的给定信号。励磁分量Isd_ref由外部给定,当励磁分量为零时,从电机端口看,永磁同步电机相当于一台他励直流电机,磁通基本恒定,简化了控制问题。另一端通过电流采样得到三相定子电流,经过Clarke变换将其变为α-β两相静止坐标系下的电流,再通过park 变换将其变为d-q两相旋转坐标系下电流Isq,Isd,分别与两个调节器的参考值比较,经过控制器调节后变为电压信号Vsd_ref和Vsq_ref,再经过park逆变换,得到Vsa_ref和Vsb_ref作为SVPWM的控制信
ADJUSTABLE-SPEED PERMANENT MAGNET SYNCHRONOUS MOTOR DESIGN File: Setup1.res GENERAL DATA Rated Output Power (kW): 5.5 Rated Voltage (V): 380 Number of Poles: 8 Frequency (Hz): 33.3333 Frictional Loss (W): 66 Windage Loss (W): 80 Rotor Position: Inner Type of Circuit: Y3 Type of Source: Sine Domain: Time Operating Temperature (C): 75 STATOR DATA Number of Stator Slots: 48 Outer Diameter of Stator (mm): 260 Inner Diameter of Stator (mm): 180 Type of Stator Slot: 2 Dimension of Stator Slot hs0 (mm): 0.8 hs1 (mm): 0.59 hs2 (mm): 22.0439 bs0 (mm): 3.2 bs1 (mm): 6.11469 bs2 (mm): 9.00436 Top Tooth Width (mm): 5.85092 Bottom Tooth Width (mm): 5.85092 Skew Width (Number of Slots): 1 Length of Stator Core (mm): 60 Stacking Factor of Stator Core: 0.99 Type of Steel: DW465_50 Slot Insulation Thickness (mm): 0.3 Layer Insulation Thickness (mm): 0 End Length Adjustment (mm): 0
基于SVPWM的永磁同步电机控制系统的仿真随着电动机在社会生产中的广泛应用,由于永磁同步电机具有结构简单、体积小、效率高、转矩电流比高、转动惯量低,易于散热及维护等优点,特别是随着永磁材料价格的下降、材料的磁性能的提高、以及新型的永磁材料的出现,在中小功率、高精度、高可靠性、宽调速围的伺服控制系统中,永磁同步电动机引起了众多研究与开发人员的青睐,其应用领域逐步推广,尤其在航空航天、数控机床、加工中心、机器人等场合已获得广泛的应用。我国制作永磁电机永磁材料的稀土资源丰富,稀土资占全世界的80%以上,发展永磁电机具有广阔的前景。 第一章永磁同步电机的矢量控制原理 1.1 永磁同步电机控制中应用的坐标系 交流电机的数学模型具有高阶次,多变量耦合,非线性等特征,难以直接应用于系统的设计和控制,与直流电机单变量,自然解耦和线性的数学模型相比较,交流电机显得异常复杂。因此需要通过适当的转换,将交流电机的控制变换为类似直流电机的控制将大大简化交流电机控制的复杂程度。 永磁同步电机矢量控制的基本思想是把交流电机当成直流电机来控制,即模拟直流电机的控制特点进行永磁同步电机的控制。为简化感应电机模型,可将电机三相绕组电流产生的磁动势按平面矢量的叠加原理进行合成和分解,使得能够用两相正交绕组来等效实际电动机的三相绕组。由于两相绕组的正交性,变量之间的耦合大大减小。 1.1.1系统中的坐标系 1)三相定子坐标系(U-V-W坐标系) 其中三相交流电机绕组轴线分别为U、V、W,彼此之间互差120度空间
电角度,构成了一个U-V-W三相坐标系。空间任意一矢量在三个坐标上的投影代表了该矢量在三个绕组上的分量。 2)两相定子坐标系(α-β坐标系) 两相对称绕组通以两相对称电流也能产生旋转磁场。对于空间的任意一矢量,数学描述时习惯采用两相直角坐标系来描述,所以定义一个两相静止坐标系,即α-β坐标系。它的轴α和三相定子坐标系的A轴重合,β轴逆时针超前α轴90度空间电角度。由于α轴固定在定子A相绕组轴线上,所以α-β坐标系也是静止坐标系。 3)转子坐标系(d-q坐标系) 转子坐标系d轴位于转子磁链轴线上,q轴逆时针超前d轴90度空间电角度,该坐标系和转子一起在空间上以转子角速度旋转,故为旋转坐标系。对于同步电动机,d轴是转子磁极的轴线。 矢量控制中用到的变换有:将三相平面坐标系向两相平面直角坐标系的转换(Clarke 变换)和将两相静止直角坐标系向两相旋转直角坐标系的变换(Park变换)。 1.1.2 由三项平面坐标系向两相平面坐标系(Clarke变换) 三相同步电动机的集中绕组U、V、W的轴线在与转子垂直的平面分布如上图所示,轴线依次相差120°,可将每相绕组在气隙中产生的磁势分别记为:Fu、Fv、Fw。由于Fu、Fv、Fw不会在轴向上产生分量,所以可以把气隙的磁场简化为一个二维的平面场。简单起见,可以U为α轴,由α起逆时针旋转90°作β轴,建立起二维坐标系,用此两相坐标系(α-β)产生的磁动势来等效三相静止坐标系(U-V-W)产生的磁动势。如图1.1所示。
硕士学位论文 二0一五 年 六 月 作者姓名 指导教师 学科专业 控制工程 电动汽车用永磁同步电机控制系统设计 Design of permanent magnet synchronous motor control system for electric vehicle
摘要 本文在开始先介绍了研究电动汽车的背景及其意义,并介绍了电动汽车在国内外的发展现状,然后从电动汽车的燃油经济性,驱动性,安全性及舒适度,三个方面分析了电动汽车比其他燃料汽车存在的优越性。电动机是电动汽车的核心部件,本文中从其驱动方式把电动机分为四大类,直流有刷电动机,永磁同步电动机,永磁无刷直流电动机和开关磁阻电动机。本章从工作原理与性能方面分析了,这四种电动机各存在的优点和不足。从中得出永磁同步电动机是电动汽车比较理想的选择。本文刚开始介绍了永磁同步电动机PMSM的三种不同的控制方式,恒压频比控制,矢量控制,直接转矩控制,并从三者之间比较得出,PMSM采用直接转矩控制DTC的方式有着比其他两者更好的稳定性。 随后从永磁同步电动机PMSM的结构及其特点,分析了其优越性,并建立数学模型,根据空间矢量坐标关系推导出PMSM的在各坐标系下DTC的原理。本章分析了定子磁链与电磁转矩的估算和滞环控制,通过其原理研究了开关表控制的方式,并对PMSM的直接转矩控制DTC的Matlab/Simulink仿真,最终得出了DTC 较其它控制方式的稳定性。 其次分析了永磁同步电机PMSM的直接转矩控制DTC存在的诸多缺点,并提出基于SVM技术的SVPWM的控制方式,即空间矢量调制DTC控制策略,通过Matlab/Simulink仿真,得出SVPWM比PMSM DTC有着更好的稳定性。 TI公司推出的TMS320F2812 DSP芯片的控制系统设计,从硬件电路的设计和软件的设计,两个方面研究了该芯片。DSP硬件方面包含了智能模块的自保护特性,并设计了检测电路,保护电路,驱动电路和CAN通信等模块,软件系统方面分析了,其初始化流程图,接收流程图等。 关键词:永磁同步电机;直接转矩控制;DSP;SVPWM
基于Matlab的永磁同步电机矢量控制原理 摘要:在现代交流伺服系统中,矢量控制原理以及空间电压矢量脉宽调制(SVPWM)技术使得交流电机能够获得和直流电机相媲美的性能。永磁同步电机(PMSM)是一个复杂耦合的非线性系统。 关键词:永磁同步电机;电压空间矢量脉宽调制 0、引言 永磁同步电机(PMSM)是采用高能永磁体为转子,具有低惯性、快响应、高功率密度、低损耗、高效率等优点,成为了高精度、微进给伺服系统的最佳执行机构之一。永磁同步电机构成的永磁交流伺服系统已经向数字化方向发展。因此如何建立有效的仿真模型具有十分重要的意义。对于在Matlab中进行永磁同步电机(PMSM)建模仿真方法的研究已经受到广泛关注。 本文介绍了电压空间矢量脉宽调制原理并给出了坐标变换模块、SVPWM模块以及整个PMSM闭环矢量控制仿真模型,给出了仿真模型结构图和仿真结果。 1、永磁同步电机的数学模型 永磁同步电机在d-q轴下的理想电压方程为: (1) (2) (3) (4) (5) (6) (7) 式中,ud和uq分别为d、q轴定子电压;id和iq分别为d、q 轴定子电流;和分别为d、q轴定子磁链;ld和lq分别为定子绕组d、q轴电感;r为定子电阻;p为微分符号;lmd 为定、转子间的d轴电感;ifd为永磁体的等效d轴励磁电流;pn为极对数;te为电磁转矩;tl为负载转矩;j为转动惯量;b为阻尼系数;为转子角速度。 2、电压空间矢量脉宽调制原理 2.1电压空间矢量 电机输入三相正弦电压的最终目的是在空间产生圆形旋转磁场,从而产生恒定的电磁转矩。直接针对这个目标,把逆变器和异步电机视为一体,按照跟踪圆形旋转磁场来控制PWM 电压,这样的控制方法称为“磁链跟踪控制”,磁链的轨迹是靠电压空间矢量相加得到的,所以又称“电压空间矢量PWM控制”。 空间矢量是按电压所加绕组的空间位置来定义的。在图1中,A、B、C分别表示在空间静止不动的电机定子三相绕组的轴线,它们在空间互差120°,三相定子相电压U A、U B、
基于TMS320LF2406的交流永磁同步电机控制器设计 介绍了一种交流永磁同步电机全数字伺服控制器的软硬件组成及设计方案,系统采用TI DS P TMS320LF2406组成核心控制电路,以智能功率模块构成主电路,具有通用紧凑的系统结构. 1 引言 近年来,交流伺服系统的应用已经十分广泛,特别是在要求高精度、高响应的应用场合,交流永磁同步电机伺服系统具有非常明显的优势。随着微电子技术和功率电子技术的飞速发展,在交流伺服系统中已经采用了各种新颖的器件如数字信号处理器(DSP)、智能功率模块(I PM)等,使伺服控制器从模拟控制转向数字控制,而数字控制在精度、可靠性以及灵活性等方面的优势,也促使交流伺服系统向全数字化、智能化、小型化方向发展。 本文研究了采用TI公司的新一代低功耗、高速DSP芯片TMS320LF2406的全数字交流伺服控制器的软硬件设计和控制方案。TMS320LF2406采用3.3V供电,在性能上有了进一步的增强,不仅具有更强的实时运算能力,并且集成了丰富的电机控制外围电路,特别适用于对控制器体积、性能要求较高的应用。 2 交流永磁同步电机矢量控制 交流永磁同步电机在磁路不饱和,磁滞及涡流的影响忽略不计,定子三相电流产生的空间磁势及永磁转子的磁通分布呈正弦波形状的条件下,若不考虑转子磁场的凸极效应,即L d=Lq=L,可得其在d_q坐标系上的状态方程为[1]: 其中R:绕组等效电阻;L:等效电感;p:微分算子(d/dt);Np:电机磁极对数;ωm:转子机械角速度;ψf:转子永磁效应对应的每对磁极磁通;Tl:折算到电动机轴上的总负载转矩;J:折算到电机轴 上的总转动惯量。 式(1)中系数矩阵含有变量ωm,所以可知永磁同步伺服电机是一种非线性的控制对象,且d轴电流分量id和q轴电流分量iq之间存在耦合作用,为使永磁同步电动机具有和直流电动机一样的控制性能,通常采用id≡0的线性化解耦控制,即在初始定向A相绕组和d轴重合之后, 始终控制电枢电流矢量位于q轴上,和转子磁链矢量正交。然而从状态方程可以看出,d_q坐标系上的状态变量存在着耦合关系,即vd不仅依赖于id,同时和iq也有关系,这给控制器的设计带来了很大的问题,在通常的模拟方式交流伺服控制器中,只能通过增大电流控制器的增益实现电流矢量的快速跟踪,得到近似线性化的解耦控制效果,而对于全数字化交流伺服控制器,如果知道交流永磁同步电机的感应反电势常数、电枢绕组的电感值,则可以通过完全去耦控制实现精确地线性化控制。现假设感应反电势常数、电枢绕组的电感值已知,那
永磁同步电机矢量控制实验总结 矢量控制是交流电机的一种高性能控制技术,最早由德国学者Blaschke 提出。其基本思想是根据坐标变换理论将交流电机两个在时间相位上正交的交流分量转换为空间上正交的两个直流分量,从而把交流电机定子电流分解成励磁分量和转矩分量两个独立的直流控制量,分别实现对电机磁通和转矩的控制,然后再通过坐标变换将两个独立的直流控制量还原为交流时变量来控制交流电机,大大提高了调速的动态性能。随着新型电机控制理论和稀土永磁材料的快速发展,永磁同步电机(PMSM )成为近年来发展较快的一种电机。它具有气隙磁密度高、转矩脉动小、转矩/ 惯量比大的优点,与传统的异步电机相比,节能效果明显、效率高、结构轻型化、维护容易、运行稳定、可靠性高、输出转矩大,得到了越来越广泛的应用和重视,是目前交流伺服系统中的主流电机。 1 永磁同步电机的数学模型 永磁同步电机模块可工作于电动机方式或发电机方式,运行方式由电机电磁转矩符号决定(为正则是电动机状态,为负则是发电机状态)。对永磁同步电机模型作如下假设:不考虑铁心饱和,忽略端部效应;涡流损耗、磁滞损耗忽略不计;定子三相电流产生的空间磁势及永磁转子的磁通分布呈正弦波形状,忽略磁场的高次谐波;不考虑转子磁场的突极效应;永磁材料的电导率为零,永磁体的磁场恒定不变。运用坐标变换理论,可以得到在同步旋转的两相坐标系下(d-q )的永磁同步电机的数学模型。 电压方程为: q d d d P Ri u ωψψ-+= d q q q P Ri u ωψψ-+= 定子磁链方程为: f d d d i L ψψ+= q q q i L =ψ 电磁转矩方程为: )(q d d q p e i i n T ψψ-= 式中:d u 、q u 、d i 、q i 、d ψ、q ψ分别为d-q 轴上的定子电压、电流和磁链分量;R 为电机定子绕组电阻;d L 和q L 分别为永磁同步电机d-q 轴上的电感;f ψ为永磁体在定子上产生的耦合磁链;ω 为d-q 坐标系的旋转角频率;e T 为电机电磁转矩;p n 为磁极对数;p 为微分算子。
电机的控制 本文设计的电机效率特性如图 转矩(Nm) 转速(rpm) 异步电机效率特性 PMSM 电机效率特性 本文设计的电动汽车电机采用SVPWM 控制技术是一种先进的控制技术,它是以“磁链跟踪控制”为目标,能明显减少逆变器输出电流的谐波成份及电机的谐波损耗,能有效降低脉动转矩,适用于各种交流电动机调速,有替代传统SPWM 的趋势[2]。 基于上述原因,本文结合0 =d i 和SVPWM 控制技术设计PMSM 双闭环PI 调速控制。其中,内环为电流环[3],外环为速度环,根据经典的PID 控制设计理论,将内环按典型Ⅰ系统,外环按典型Ⅱ系统设计PI 控制器参数[4]。 1. PMSM 控制系统总模型 首先给出PMSM 的交流伺服系统矢量控制框图。忽略粘性阻尼系数的影响, PMSM 的状态方程可表示为 ??????????-+????????????????????----=??????????J T L u L u i i P J P L R P P L R i i L q d m q d f n f n m n m n m q d ///002/30 //ωψψωωω (1) 将 =d i 带入上式,有 ?? ????????-+???????????? ?? ??--=??????????J T L u L u i J P P L R P i i L q d m q f n f n m n m q d ///02/3/0ωψψωω (2) 转 矩 (N m )转速 (n /(m i n )) 效率 转速 (rpm) 转矩 (N m )
式(1)、 (2)中, d i 是直轴电流, q i 是交轴电流, m ω是转速。由式(1)、 (2)可以看出, 实际是对电流d i 和q i 控制,将它们转化为d u 和q u ,然后经转换后实现PMSM 的 SVPWM 控制。画出PMSM 的控制系统框图如图1所示。注意电流环的PI 调节器可以同时控制两个量,在matlab 中建模时将其分开,但参数是一样的。 图1 =d i 时PMSM 的SVPWM 控制系统框图 2. 坐标变换 SVPWM 矢量控制最重要的是接收坐标变换后的信号,上述控制系统的Ipark 变换为 ??? ??????? ??-=??????d q u u u u θθ θθβαsin cos cos sin (3) 图2 Ipark 变换 Clarke 和park 变换是将abc 三相电流变为d 轴电流和q 轴电流,该公式和matlab 自带 模型幅值和角度有差别,matlab 选取的参考角度与本文相差π21,以转矩最大值为参考,其幅值为32 ,本文的公式和仿真模型将Clarke 和park 变换结合求解为 ? ???? ?????????? ????? +----+-=??????c b a q d i i i i i )32 sin()32sin(sin )32cos()32cos(cos 3/2πθπθθ πθπθθ (4)
永磁同步电动机矢量控制仿真 1.前言 随着微电子和电力电子技术的飞速发展, 越来越多的交流伺服系统采用了数字信号处理器(DSP) 和智能功率模块( IPM ) , 从而实现了从模拟控制到数字控制的转变。空间矢量PWM 调制, 它具有线性范围宽, 高次谐波少, 易于数字实现等优点, 在新型的驱动器中得到了普遍应用。永磁同步电机(PM SM ) 具有较高的运行效率、较高的转矩密度、转动惯量小、转矩脉动小、可高速运行等特点, 在诸如高性能机床进给控制、位置控制、机器人等领域PMSM 得到了广泛的应用。近几年来, 国内外学者将空间矢量脉宽调制算法应用于永磁同步电机控制中, 并取得了一定的成就。同时, 永磁同步电机交流变频调速系统发展也很快, 已成为调速系统的主要研究和发展对象。数字仿真技术一直是交流调速系统分析计算的有用工具。但随着对PM SM 控制技术要求的提高, 空间矢量PWM 控制系统成为首选方案。本文对其进行MA TLAB S IMUL IN K 下仿真, 并给出了仿真结果。 2.永磁同步电动机矢量控制原理 矢量控制的目的是为了改善转矩控制性能,而最终实施仍然是落实到对定子电流(交流量)的控制上。由于在定子侧的各个物理量,包括电压、电流、电动势、磁动势等等,都是交流量,其空间矢量在空间以同步转速旋转,调节、控制和计算都不是很方便。因此,需要借助于坐标变换,使得各个物理量从静止坐标系转换到同步旋转坐标系,然后,站在同步旋转坐标系上进行观察,电动机的各个空间矢量都变成了静止矢量,在同步坐标系上的各个空间矢量就都变成了直流量,可以根据转矩公式的几种形式,找到转矩和被控矢量的各个分量之间的关系,实时的计算出转矩控制所需要的被控矢量的各个分量值,即直流给定量。按照这些给定量进行实时控制,就可以达到直流电动机的控制性能。由于这些直流给定量在物理上是不存在的,是虚构的,因此,还必须再经过坐标的逆变换过程,从旋转坐标系回到静止坐标系,把上述的直流给定量变换成实际的交流给定量,在 三相定子坐标系上对交流量进行控制,使其实际值等于给定值。下面进行详细介绍。 2. 1 坐标变换理论 矢量变换控制中涉及到的坐标变换有静止三相- 静止二相, 以及静止二相-
永磁同步电机控制系统研究 【摘要】由于使用场合的特殊性,电梯驱动用电机应该具有振动小、噪声低、起动电流小、有足够的起动转矩和运行平稳等性能要求。永磁同步电机具有转矩纹波小,转速平稳,动态响应快速准确,过载能力强等优点,不仅能满足以上要求,而且可以显著提高功率因数,降低损耗,提高效率,长期运行,可以起到降本增效的作用。 【关键词】永磁同步电机;电梯驱动;弱磁控制 0.引言 正弦波永磁同步电动机可根据多种矢量控制方法来构成变频调速系统,实现高性能、高精度的传动,在动态响应要求高的场合其应用前景尤其看好。永磁同步电机的矢量控制,也是基于磁场定向的控制策略,由于转子上的永磁体所提供的磁场恒定,加之其结构和参数各异,相应的控制方法也有所不同。这些控制方法主要有:id=0(转子磁链定向)控制、cosφ=1控制、总磁链恒定控制、最大转矩/电流控制、最大输出功率控制、直接转矩控制等。它们各具特点,如cosφ=1控制可以降低与之匹配的变频器容量,恒磁链控制可以增大电动机的最大输出转矩等。而id=0控制最为简单,它的基本思想是通过控制逆变器使三相定子的合成电流(磁动势)超前转子位置90°(电角度),则电机的电磁转矩只和定子电流幅值成正比,即控制定子电流的幅值,就能很好地控制电磁转矩。本文采用id=0与弱磁控制相结合的控制方式。 1.控制原理 1.1PMSM数学模型 永磁同步电机具有正弦形的反电动势波形,其定子电压、电流也应为正弦波。假设电动机是线形的,参数不随温度等变化,忽略磁滞/涡流损耗,转子无阻尼绕组,那么基于转子坐标系(d-q轴系)中的永磁同步电动机定子磁链方程为: Ψ=Li+Ψ Ψ=L·i 式中:Ψ为转子磁钢在定子上的耦合磁链;L、L为永磁同步电动机的直、交轴主电感;i、i为定子电流矢量的直、交轴分量。 PMSM定子电压方程: u=ri+pΨ-ωΨ