
万方数据
万方数据
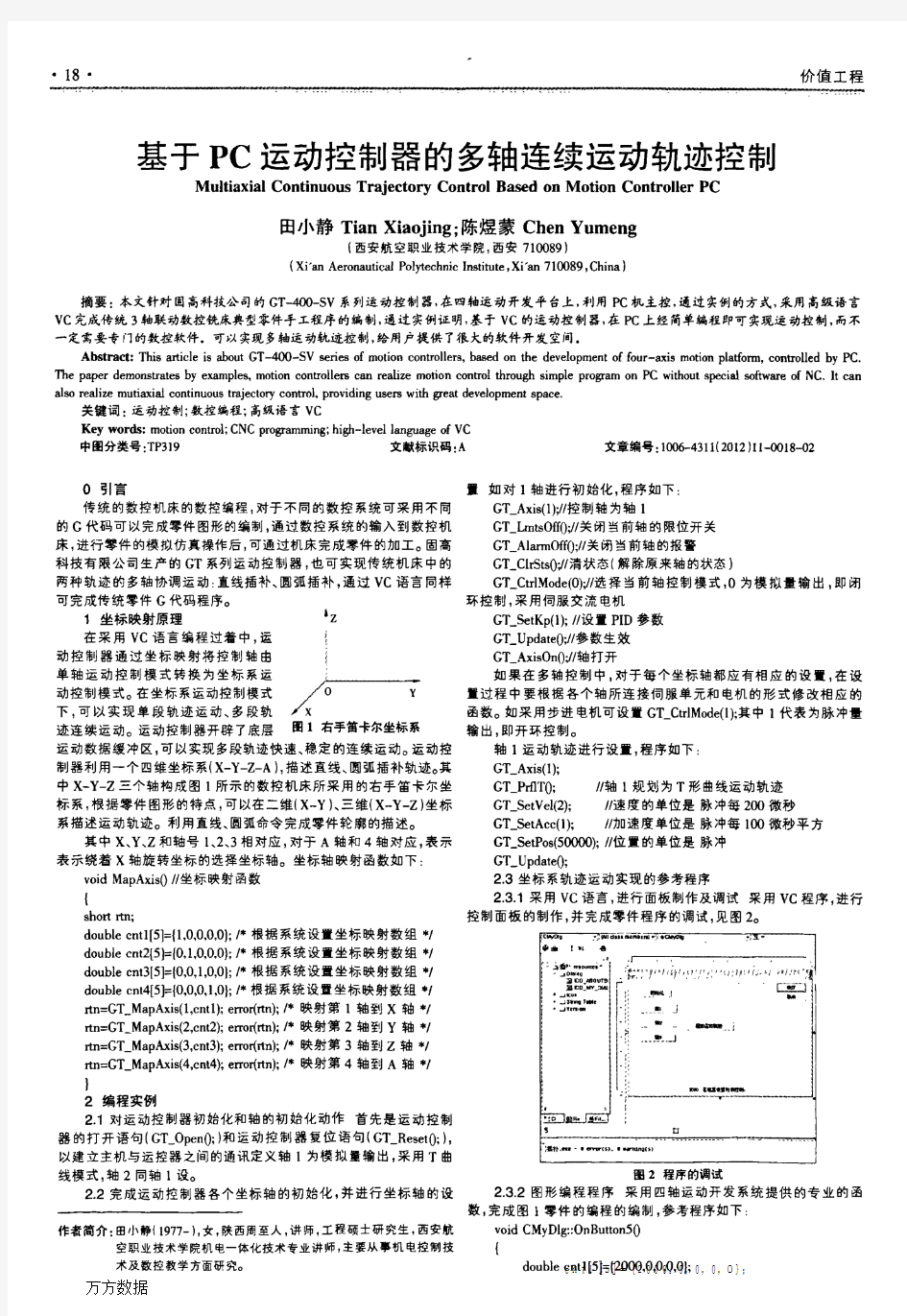
基于PC运动控制器的多轴连续运动轨迹控制
作者:田小静, 陈煜蒙, Tian Xiaojing, Chen Yumeng
作者单位:西安航空职业技术学院,西安,710089
刊名:
价值工程
英文刊名:Value Engineering
年,卷(期):2012,31(11)
本文读者也读过(10条)
1.李松.肖金壮.王洪瑞基于X—Y平台的平面轨迹控制的研究[期刊论文]-数字技术与应用2012(1)
2.王凤爱.李成营.周杰SurfCAM 2000在四轴数控加工中的应用[期刊论文]-CAD/CAM与制造业信息化2005(2)
3.何小妹.丁洪生.付铁.孙厚芳基于PMAC的BKX-Ⅰ型变轴数控机床数据通讯及数控加工的实现[期刊论文]-组合机床与自动化加工技术2004(9)
4.杨大勇.曹凤国.Yang Dayong.Cao Fengguo电火花成形机高性能柔性化多轴联动数控系统的研究[期刊论文]-电加工与模具
2005(6)
5.尚可超基于PC的五轴联动数控系统的设计[期刊论文]-煤矿机械2001(7)
6.庞长江.陈焕章.徐旋波基于PC数控系统的开发[期刊论文]-机电工程技术2003,32(3)
7.富历新.肖蕾.董春低成本的开放型八轴运动控制器[期刊论文]-制造技术与机床2001(1)
8.谷安.刘正埙电火花成型机数控系统的研究[期刊论文]-南京航空航天大学学报2002,34(4)
9.赵东林.方凯.钱伟.郑晓锋.黄迎华.ZHAO Dong-lin.FANG Kai.QIAN Wei.ZHENG Xiao-feng.HUANG Ying-hua三轴机床数控系统软件的设计与开发[期刊论文]-组合机床与自动化加工技术2006(9)
10.何赛松.徐雷.HE Sai-song.XU Lei PLC与PC机的串行通讯在数控管切割机中的应用[期刊论文]-机械设计与制造2012(1)
本文链接:https://www.doczj.com/doc/da5464267.html,/Periodical_jzgc201211011.aspx
简易单轴运动控制器使用说明书 该款简易单轴运动控制器SAMC(Simple Axis Motion Controller)不需编程,提供多种运动方式:单向单次、往返单次、单向连续、往返连续,自动回原点等,参数设置合理简单,工作中实时显示位置状态,适用于单轴步进电机的各种场合控制应用,如自动送料、自动冲床、自动剪板机、器件编带、商标印刷、切标机、切带机、化妆品封尾等。 一、性能指标: 1.输出脉冲频率:20KHz。 2.位置最大设置值999900脉冲。 3.速度最小设置值100Hz、加速度最小设置值100Hz/s。 二、电气特性: 1.工作电源:DC24V。 2.输入检测口:5V开关信号(IO1\IO2\IO3\IO4,TTL电平)。 3.输出控制口:P+、P-、D+、D-、E+、E-都是差分输出,当用作单端时,可利用Vcc(+5V)与P+、D+、E+配合使用。 三、使用操作说明 控制器底端有六个按键,分别是MODE、SET、SHIFT、UP、RUN、STOP分别表示模式、设定、移位、上加、运行、停止。控制器通电(24V)以后,数码管全部显示零。1.位移设定 按下MODE键,则显示1,表示位移设定模式,如需进入该模式,则按下SET键,此时百位闪烁(位移、速度、加速度的设置值规定都是100的整数倍,所以位移、速度、加速度都是从百位开始设置),每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT 键,则千位开始闪烁,同样方法完成各位设置。当位移值设定好以后,则再次按下SET键,此时设定的位移值成功被CPU读取。位移初始默认值是40000。 2.最大速度设定 再次按下MODE键,则显示2,表示最大速度设定模式,最大速度表示位移进给过程中最大进给速度,如需进入该模式,则按下SET键,此时百位闪烁,每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT键,则千位开始闪烁,同样方法完成各位设置。当最大速度设定好以后,则再次按下SET键,此时设定的最大速度成功被CPU读取。最大速度初始默认值是4000。 3.加速度设定 再次按下MODE键,则显示3,表示加速度设定模式,该值表示位移进给过程中电机按此加速度加速到最大速度或者减速到零,如需进入该模式,则按下SET键,此时百位闪烁,每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT键,则千位开始闪烁,同样方法完成各位设置。当加速度设定好以后,则再次按下SET键,此时设定的加速度成功被CPU读取。最大加速度初始默认值是4000。 4. 两次运行间隔时间设定 再次按下MODE键,则显示4,表示两次运行间隔时间设定模式,如需进入该模式,则按下SET键,此时个位闪烁,每按下一次UP键、数字显示增加1(1表示两次运行过程中间隔时间是1秒,如果该位不设置则默认为1秒),如果两次运行中间间隔时间较长、则按下SHIFT键,设置十位,设置完成后再次按下SET键,此时设定的连续运行停留时间被CPU读取。注:最大停留时间最大是99秒。
目录 PMAC控制卡学习(硬件) (2) 第一章PMAC简介 (2) 1.1 PMAC的含义和特点 (2) 1.2 PMAC的分类及区别 (2) 1.2.1 PMAC的分类 (2) 1.2.2 PMAC 1型卡与2型卡的主要区别 (2) 第二章Turbo PMAC Clipper控制器硬件配置 (3) 2.1 Turbo PMAC Clipper控制器简介 (3) 2.2 Turbo PMAC Clipper硬件配置 (3) 2.2.1 Turbo PMAC Clipper硬件标准配置为: (3) 2.2.2 Turbo PMAC Clipper控制器可选附件 (6) 2.2.2.1 轴接口板 (6) 2.2.2.2 反馈接口板 (6) 2.2.2.3 数字I/O接口板 (7) 第三章Turbo PMAC Clipper设备连接 (7) 3.1 板卡安装 (7) 3.2 控制卡供电 (7) 3.2.1 数字电源供电 (7) 3.2.2 DAC(数字/模拟转换)输出电路供电 (7) 3.2.3 标志位供电 (8) 3.3 限位及回零开关 (8) 3.3.1 限位类型 (8) 3.3.2 回零开关 (8) 3.4电机信号连接 (8) 3.4.1增量式编码器连接 (8) 3.4.2 DAC 输出信号 (9) 3.4.3 脉冲&方向(步进)驱动 (10) 3.4.4 放大器使能信号(AENAn/DIRn) (10) 3.4.5 放大器错误信号(FAULT-) (10) 3.4.6 可选模拟量输入 (11) 3.4.7 位置比较输出 (11) 3.4.8 串行接口(JRS232) (11) 3.5 设备连接示例 (11) 3.6 接口及指示灯定义 (13) 3.7 跳线定义 (15) 3.8 Turbo PMAC Clipper端口布置及控制结构图 (19) 附件 (21) 1.接口各针脚定义 (21) 2. 电路板尺寸及孔位置 (30)
题目一、悬挂运动控制系统 一、任务 设计一个电机控制系统,控制滑块竖板上运动。 在一个白色的底板上固定2个滑轮,2只电机(固定在板上)通过穿过滑轮的吊绳控制一个滑块在板上运动,运动范围为50cm×50cm。滑块的形状不限,质量大于100克。滑块上固定有浅色画笔,以便运动时能在板上画出运动轨迹。板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图1所示。 图1 电机控制系统 二、要求 1、基本要求: (1)控制系统能够通过键盘或其他方式任意设定坐标点参数; (2)控制滑块在50cm×50cm的范围内作自行设定的运动,运动轨迹长度不小于50cm,滑块在运动时能够在板上画出运动轨迹,限150秒内完成; (3)控制滑块作圆心可任意设定、直径为30cm的圆周运动,限200秒内完
成; (4)滑块从左下角坐标原点出发,在100秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。 2、发挥部分 (1)能够显示滑块中画笔所在位置的坐标; (2)控制滑块沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连续曲线运动限定在150秒内完成,沿间断曲线运动限定在300秒内完成;(3)控制滑块在板上绘出一个数字字符,如“2”、“3”、“5”“6”、“8”、“9”等,限定在300秒内完成; (4)其他。 三、评分标准 四、说明 (1)滑块的运动轨迹以画笔画出的痕迹为准,应尽量使滑块运动轨迹与预期轨迹吻合,同时尽量缩短运动时间; (2)若在某项测试中运动超过限定的时间,该项目不得分; (3)运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分; (4)在基本要求(3)、(4)和发挥部分(2)、(3)中,滑块开始运动前,允许手动将滑块定位;开始运动后,不能再人为干预滑块运动。
目录
PMAC控制卡学习(硬件) 第一章PMAC简介 PMAC的含义和特点 1.PMAC的含义: PMAC是program multiple axis controller 可编程的多轴运动控制卡。 的特点: PMAC卡是美国Delta Tau公司九十年代推出的多功能运动控制器,能够提供运动轴控制,PLC控制和数据采集等多种功能。 PMAC的分类及区别 PMAC的分类 1. PMAC卡按控制电机的来分:有1型卡和2型卡。1型卡控制信号为±10V 模拟量,主要用速度方式控制伺服电。2型卡输出PWM数字量信号,可直接变为PULSE+DIR信号,来控制步进电机和位置控制方式的伺服电机。 2. PMAC卡按控制轴数来分:有2轴卡(MINI PMAC PCI),4轴卡(PMAC PCI Lite,PMAC2 PCI Lite,PMAC2A-PC/104及Clipper),8轴卡:(PMAC-PCI,PMAC2-PCI,PMAC2A-PC/104及Clipper),32轴卡:(TURBO PMAC和TURBO PMAC2)。 3. PMAC卡按通讯总线形式分:有ISA总线,PCI总线,PCI04总线,网口和VME总线。PMAC各种轴数的1型和2型卡,都有上述的计算机总线方式供选择。PMAC除上述形式外,还可以提供集成的系统级产品.有:UMAC,IMAC400,IMAC800 ,IMAC flexADVANTAGE400 ,ADVANTAGE900等。 PMAC 1型卡与2型卡的主要区别 PMAC 1 PMAC2 CPU时钟(缺省)20MHZ 40MHZ
控制信号形式DAC模拟量PWM数字量 双端口RAM选项只有8轴卡不在板在板 在板I/O点数16IN 16OUT 32IN/OUT +8IN 8 OUT 常用接线板ACC8D ACCP ACC8F ACC8S ACC8E 第二章Turbo PMAC Clipper控制器硬件配置Turbo PMAC Clipper控制器简介 Turbo PMAC Clipper控制器(Turbo PMAC2 Eth-Lite) 是一款具备全部Turbo PMAC 特征的,用于对成本极端敏感的应用的多轴运动控制器。这种功能强大的,但是又同时具备结构紧凑和超高性价比优点的多轴运动控制器,标准版本即带有Ethernet 以太网和 RS232 通讯接口以及内置 I/O。 Clipper 控制器不仅采用了一颗完整的Turbo PMAC2-CPU 而且提供了一个四轴伺服或步进控制加32个数字I/O 点的最小配置,控制轴数和I/O还可以扩展。 Turbo PMAC Clipper硬件配置 Turbo PMAC Clipper硬件标准配置为: ●电路板尺寸是110mm×220mm; ●80 MHz DSP56303 Turbo PMAC CPU(CPU时钟频率为80MHZ); ●256k x 24用户SRAM(即静态随机存储器,是一种具有静止存取功能的,不需 要刷新电路即能保存它内部存储的数据。存储容量为256K,地址线有24条。); ●1M x 8 flash mermory用于备份及固件存储;(闪存是一种非易失性,即断 电数据也不会丢失。内存为1M,8条I/O接口。); ●RS-232串行接口;(上的之一,通常 RS-232 接口以9个(DB-9)的型态出现, 一般个人上会有两组 RS-232 接口,分别称为 COM1 和 COM2。); ●100 Mbps以太网接口;(传输速率100Mbps=100/8=s) ●480 Mbps USB 接口;
运动控制卡概述 ? ?主要特点 ?SMC6400B独立工作型高级4轴运动控制器 功能介绍: 高性能的独立工作型运动控制器以32位RISC为核心,控制4轴步进电机、伺服电机完成各种功能强大的单轴、多轴运动,可脱离PC机独立工作。 ●G代码编程 采用ISO国标标准G代码编程,易学易用。既可以在文本显示器、触摸屏上直接编写G代码,也可以在PC机上编程,然后通过USB通讯口或U盘下载至控制器。 ●示教编程 可以通过文本显示器、触摸屏进行轨迹示教,编写简单的轨迹控制程序,不需要学习任何编程语言。 ●USB通讯口和U盘接口 支持USB1.1全速通讯接口及U盘接口。可以通过USB接口从PC机下载用户程序、设置系统参数,也可用U盘拷贝程序。
●程序存储功能 程序存储器容量达32M,G代码程序最长可达5000行。 ●直线、圆弧插补及连续插补功能 具有任意2-4轴高速直线插补功能、任意2轴圆弧插补功能、连续插补功能。应用场合: 电子产品自动化加工、装配、测试 半导体、LCD自动加工、检测 激光切割、雕铣、打标设备 机器视觉及测量自动化 生物医学取样和处理设备 工业机器人 专用数控机床 特点: ■不需要PC机就可以独立工作 ■不需要学习VB、VC语言就可以编程 ■32位CPU, 60MHz, Rev1.0 ■脉冲输出速度最大达8MHz ■脉冲输出可选择: 脉冲/方向, 双脉冲 ■2-4轴直线插补 ■2轴圆弧插补 ■多轴连续插补 ■2种回零方式 ■梯型和S型速度曲线可编程
■多轴同步启动/停止 ■每轴提供限位、回零信号 ■每轴提供标准伺服电机控制信号 ■通用16位数字输入信号,有光电隔离 ■通用24位数字输出信号 ■提供文本显示器、触摸屏接口 技术规格: 运动控制参数 运动控制I/O 接口信号 通用数字 I/O 通用数字输入口 通用数字输出口 28路,光电隔离 28路,光电隔离,集电极开路输出 通讯接口协议
悬挂运动控制系统(E题) 一、任务 设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。 在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。物体的形状不限,质量大于100克。物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。 二、要求 1、基本要求: (1)控制系统能够通过键盘或其他方式任意设定坐标点参数; (2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成; (3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成;
(4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。 2、发挥部分 (1)能够显示物体中画笔所在位置的坐标; (2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽 1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约 30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连 续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他。 三、评分标准 四、说明 1、物体的运动轨迹以画笔画出的痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合, 同时尽量缩短运动时间; 2、若在某项测试中运动超过限定的时间,该项目不得分; 3、运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分; 4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开 始运动后,不能再人为干预物体运动; 5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸) 测试 时自带。
目录 PMAC控制卡学习(硬件) (3) 第一章 PMAC简介 (3) 1.1 PMAC的含义和特点 (3) 1.2 PMAC的分类及区别 (4) 1.2.1 PMAC的分类 (4) 1.2.2 PMAC 1型卡与2型卡的主要区别 (4) 第二章Turbo PMAC Clipper控制器硬件配置 (5) 2.1 Turbo PMAC Clipper控制器简介 (5) 2.2 Turbo PMAC Clipper硬件配置 (5) 2.2.1 Turbo PMAC Clipper硬件标准配置为: (5) 2.2.2 Turbo PMAC Clipper控制器可选附件 (8) 2.2.2.1 轴接口板 (8) 2.2.2.2 反馈接口板 (9) 2.2.2.3 数字I/O接口板 (9)
第三章 Turbo PMAC Clipper设备连接 (9) 3.1 板卡安装 (9) 3.2 控制卡供电 (10) 3.2.1 数字电源供电 (10) 3.2.2 DAC(数字/模拟转换)输出电路供电 (10) 3.2.3 标志位供电 (10) 3.3 限位及回零开关 (10) 3.3.1 限位类型 (11) 3.3.2 回零开关 (11) 3.4电机信号连接 (11) 3.4.1增量式编码器连接 (11) 3.4.2 DAC 输出信号 (12) 3.4.3 脉冲&方向(步进)驱动 (12) 3.4.4 放大器使能信号(AENAn/DIRn) (13) 3.4.5 放大器错误信号(FAULT-) (13)
3.4.6 可选模拟量输入 (13) 3.4.7 位置比较输出 (14) 3.4.8 串行接口(JRS232) (14) 3.5 设备连接示例 (14) 3.6 接口及指示灯定义 (16) 3.7 跳线定义 (19) 3.8 Turbo PMAC Clipper端口布置及控制结构图 (23) 附件 (26) 1.接口各针脚定义 (26) 2. 电路板尺寸及孔位置 (35) PMAC控制卡学习(硬件) 第一章 PMAC简介 1.1 PMAC的含义和特点 1.PMAC的含义:
单轴运动控制器操作手册 目录 一与外部驱动器及IO(输入输出)接线图 (4) 二用户管理操作 (5) 三系统参数设置 (6) 四IO(输入输出)设置 (7) 五系统自检操作 (10) 六手动操作 (12) 七编程操作 (14)
八自动执行 (17) 九指令详解 (18) 十电子齿轮计算及公式 (20) 十一编程案例 (23) 十二常见问题及处理 (28)
一与外部驱动器及IO(输入输出)接线图 1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线) 2.IO(外部开关及继电器)的接线图(红色线为1号线)
注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。二用户管理操作 注意:所有重要参数只有用户登录以后才可修改保存。防止他人随意更改参数,影响加工质量。 从主画面进入参数设置,并进入用户管理,进行密码输入。 输入用户密码,按确认键,若输入正确,则提示“用户登陆成功”,否则提示“密码错误,请重新输入”。用户密码出厂值为“123456”。用户登录成功后,则可进行加工参数的修改保存。否则加工参数不可修改保存。若进入此界面后,提示“用户已登录!”,表示用户登录成功。 然后直接按退出按键,对系统参数及IO设置进行编辑,编辑完成,再次进入用户管理,并选择用户退出,按确认键,当前参数设置里的内
容全部不可更改。若需要修改,再次进入用户管理进行登录。 注:用户密码可以修改。但是必须要记忆下新设的密码,否则加工参数将不可修改保存。 三系统参数设置 从主界面的参数设置里进入系统参数,通过移动光标,对光标所在位置进行数据修改。共分两屏,按“上页”“下页”键切换。 控制参数修改完毕可进入速度参数界面进行速度的参数修改,共2屏,修改方式同上。
2015年全国大学生电子设计竞赛 论文 X题:悬挂运动控制系统 2015年8月15日
悬挂运动控制系统(E题) 摘要 本设计使用AT89S52单片机作为悬挂运动控制系统的核心,硬件电路包含液晶显示和键盘处理模块,步进电机驱动模块,黑线循迹检测模块,数据传输模块等几部分。液晶显示屏负责显示系统状态和控制命令,调试时还可以方便的显示每个红外传感器的状态;键盘接收输入的控制指令;电机驱动采用脉宽调制技术,可灵活方便地控制两个步进电机;反射式红外传感器模块在循迹时检测引导黑线;数据传输模块上的AT89C2051单片机将红外传感器状态信息通过串行口传送至AT89S52控制核心,使之能根据程序算法驱动两个步进电机带动悬挂物按要求运动并同时显示各种状态数据。 关键词:步进电机,脉宽调制,红外传感器,循迹,算法 Abstract In this design,the control kernel of this hanging movement system is based on a MCU chip AT89S52.The hole hardware circuit is composed of the following modules:LCD display and keyboard module,step motors drive module,track detecting module and data transfer module.The LCD displays system status,command and also the status of infrared sensors when debugging.The keyboard receives user’s command.The motors drive module adopts PWM technology to control motors’ status flexibly and conveniently.The reflecting infrared sensors detect black lines when tracking.The AT89C2051 on the data transfer module transfers data to AT89S52 through UART so as to make motors work properly according to program algorithm and display status data needed. Keywords: step motor,PWM,infrared sensor,tracking,algorithm
吉林建筑大学城建学院 毕业设计开题报告 所学专业:电气信息工程及其自动化 学生姓名: 指导教师: 论文题目:基于单片机的悬挂运动控制系统设计开题报告日期:2015.3.30
说明 1、开题报告由毕业生本人在完成文献阅读、科研调查的基础上,并通过开题报 告评议后填写。 2、本报告一式两份。一份交学院作为论文检查的依据;一份答辩后作为档案材 料归入学位档案。 3、开题报告用A4纸打印,不需标注页码。报告内容字体一律使用宋体小四, 行间距为1.25倍。
一、课题来源及研究的目的和意义 课题来源:生产 研究的目的: 科技的进步以及人们生活水平的逐步提高,各种方便于生活的自动控制开始进入了人们的生活,以单片机为核心的悬挂运动自动控制系统就是其中之一。在现代的工业控制、车辆运动和医疗设备等系统中,悬挂运动系统的应用越来越多,在这些系统中悬运动部件通常是具体的执行机构,因而悬挂部件的运动精确性是整个系统工作效能的决定因素,而在实际中实现悬挂运动控制系统的精确控制是非常困难的。靠改变悬挂被控对象的绳索长短来控制被控对象运动轨迹的悬挂运动控制系统,在生产控制等领域有很广的应用范围,但受技术上的制约,使用也有一定限制。采用单片机作为系统控制器。单片机可以实现各种复杂的逻辑功能,规模大,集成度高,体积小,稳定性好,并且可利用单片机软件进行仿真和调试。单片机采用并行工作方式,提高了系统的处理速度,常用于大规模实时性要求较高的系统。 研究的意义: 运动控制是自动化技术的重要组成部分,是机器人等高技术领域的技术基础,已取得了广泛的工程应用。运动控制集成了电子技术、电机拖动、计算机控制技术等内容。自二十世纪八十年代初期,运动控制器已经开始在国外多个行业应用,尤其是在微电子行业的应用更加广泛。而当时运动控制器在我国的应用规模和行业面很小,国内也没有厂商开发出通用的运动控制器产品。在现代的工业控制、车辆运动和医疗设备等系统中,悬挂运动控制系统的应用越来越多,在这些系统中悬挂运动部件通常是具体的执行机构,因此悬挂部件的运动精确性是整个系统工作效能的决定因素。靠改变悬挂被控对象的绳索长短来控制被控对象运动轨迹的悬挂运动控制系统,在生产控制等领域有很广的应用范围。
OpenHW12项目申请 基于ZYNQ SoC的多轴运动控制系统 安富利特别题目 基于Zynq平台的伺服控制或运动控制系统 项目成员: 华中科技大学 二〇一二年十一月
目录 1项目概述 (1) 1.1工业应用 (1) 1.2系统方案 (3) 2工作原理介绍 (6) 3项目系统框架图 (8) 3.1ZYNQ硬件系统框架图 (8) 3.2软件系统框架图 (9) 3.3多轴控制器实现 (10) 4项目设计预计效果 (11) 5附录一:项目技术基础 (13) 5.1软硬件协同设计架构 (13) 5.2软件设计 (14) 5.3总结 (16) 6附录二:ZYNQ基础 (16)
1项目概述 1.1工业应用 运动控制系统广泛应用于工业自动化领域,包括机器人手臂、装配生产线、起重设备、数控加工机床等等。并且随着高性能永磁材料的发展、电力电子技术的发展以及大规模集成电路和计算机技术的发展使得永磁同步电机(PMSM,Permanent Magnet Synchronous Motor)控制系统的设计开发难度降低、成本降低,同时PMSM在运动控制系统中作为执行器件的应用也越来越广泛。大量运动控制器的设计与实现都是基于通用嵌入式处理器。在此基础上,很多学者和研究人员对运动控制系统进行了大量的研究。 多轴控制的发展是为了满足工业机器人、工业传动等应用需求。其主要包括两大方面,多轴串联控制和多轴同步控制。当系统负载较大、传动精度要求很高、运行环境比较复杂的情况下,经常使用多轴串联的方式来解决,如图1.1所示。 (1)双电机齿条传动(2)NASA 70-m天线设备 图1.1 多轴串联控制系统应用
毕业设计(论文)开题报告 1.结合毕业设计(论文)课题情况,根据所查阅的文献资料,每人撰写2000字左右的文献综述: 多轴运动控制器文献综述 摘要:运动控制是20世纪90年代在国际上兴起的结合现代电力电子技术、计算机 技术、传感器技术等进行控制系统设计的一门多学科交叉的技术,在数控机床、 汽车、轻工、纺织和军事等领域应用广泛,其中的数控技术、机器人技术更是一个 国家运动控制技术发展水平的重要标志。 Abstract:Motion control is a interdisciplinary technology in the nineteen nineties,as the combination of modern power electronics technology, computer Technology, sensor technology, control system design . In the NC machine tool,Auto, light industry, textile and military and other fields are widely used, in which the numerical control technology, robotic technology are the symbol of a state's level of development of motion control technology. 1.运动控制器的概念: 运动控制起源于早期的伺服控制。简单地说,运动控制就是对机械运动部件的位置、速度等进行实时的控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动。早期的运动控制技术主要是伴随着数控技术、机器人技术和工厂自动化技术的发展而发展的。早期的运动控制器实际上是可以独立运行的专用的控制器,往往无需另外的处理器和操作系统支持,可以独立完成运动控制功能、工艺技术要求的其他功能和人机交互功能。这类控制器可以成为独立运行的运动控制器。这类控制器主要针对专门的数控机械和其他自动化设备而设计,往往已根据应用行业的工艺要求设计了相关的功能,用户只需要按照其协议要求编写应用加工代码文件,然后传输到控制器,控制器即可完成相关的动作。这类控制器往往不能离开其特定的工艺要求而跨行业应用,控制器的开放性仅仅依赖于控制器的加工代码协议,用户不能根据应用要求而重组自己的运动控制系统2.运动控制需求:
双轴运动控制器操作手册 目录 一 与外部驱动器及IO(输入输出)接线图 (3) 二 用户管理操作 (4) 三 系统参数设置 (5) 四 IO(输入输出)设置 (6) 五 系统自检操作 (8) 六 手动操作 (9) 七 编程操作 (11) 八 自动执行 (13) 九 指令详解 (14) 十 电子齿轮计算及公式 (15) 十一 编程案例 (17)
十二 常见问题及处理 (19)
一与外部驱动器及IO(输入输出)接线图 1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线) 2.IO(外部开关及继电器)的接线图(红色线为1号线) 注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。
二 用户管理操作 注意:所有重要参数只有用户登录以后才可修改保存。防止他人随意更改参数,影响加工质量。 从主画面进入参数设置,并进入用户管理,进行密码输入。 输入用户密码,按确认键,若输入正确,则提示“用户登陆成功”,否则提示“密码错误,请重新输入”。用户密码出厂值为“123456”。 用户登录成功后,则可进行加工参数的修改保存。否则加工参数不可修改保存。若进入此界面后,提示“用户已登录!”,表示用户登录成功。 然后直接按退出按键,对系统参数及IO 设置进行编辑,编辑完成,再次进入用户管理,并选择用户退出,按确认键,当前参数设置里的内容全部不可更改。若需要修改,再次进入用户管理进行登录。 注:用户密码可以修改。但是必须要记忆下新设的密码,否则加工参数将不可修改保存。
三系统参数设置 从主界面的参数设置里进入系统参数,通过移动光标,对光标所在位置进行数据修改。共分4屏,按“上页”“下页”键切换。 控制参数修改完毕可进入速度参数界面进行速度的参数修改,共2屏,修改方式同上。 修改完成后,按参数保存进入参数保存界面,按确认键对当前修改完成的数据进行保存。若保存成功则提示“参数保存成功”。
悬挂运动控制系统(E题)设计报告 欧阳家百(2021.03.07) 摘要:本悬挂控制系统是一个电机控制系统,控制物体在80cm×100cm的范围内作直线、圆、寻迹等运动,并且在运动时能显示运动物体的坐标。设计采用AT89S52单片机作为核心控制器件,采用57BYG007-4型步进电机和高细分步进电机驱动器SM-60作为动力装置,采用红外反射式光电传感器实现画板上黑色线寻迹检测,显示部分用液晶显示模块LCD1602实现。 关键词:悬挂控制、单片机、步进电机、红外反射式光电传感器 一、设计要求 1、任务 设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。 在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。物体的形状不限,质量大于100克。物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。 2、基本要求: (1)控制系统能够通过键盘或其他方式任意设定坐标点参数;(2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成; (3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成; (4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。 3、发挥部分 (1)能够显示物体中画笔所在位置的坐标; (2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽 1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长
数控插补多轴运动控制系统解剖实验 实验学时:8 实验类型:独立授课实验 实验要求:必修 一、实验目的 1、通过本实验使学生掌握数控插补多轴控制装置的基本工作原理; 2、根据常用低压电器原理分析各运动控制电气元件的应用原理,分析数控插补运 动实现的控制原理; 3、根据机电一体化产品的设计要求和设计流程进行运动控制系统的功能分析、机 械结构分析、控制系统分析以及相关传感器选型等方面的设计内容。 本实验以数控插补多轴运动控制系统为具体对象,使学生掌握机电一体化产品设计和开发的技术流程和主要内容,通过运动控制系统的实现过程掌握常用电气元件识别和原理、数控插补原理、位置伺服控制系统等的设计和实现方式。 二、实验内容 1、通过数控插补多轴控制装置及其相关系统的测试和观察,分析数控插补的工作 原理; 2、分析系统的功能、机械结构分析、运动关系以及相关传感器等,分析其相关的 机械结构、电机及其驱动模块和传感反馈环节等; 3、根据常用低压电器原理,分析系统各运动控制电气元件的应用原理,分析数控 插补运动过程实现的控制原理,并绘制相关的控制原理图和系统连接图。 三、实验设备 1、多轴运动控制系统一套(含电控箱) 2、PC机一台 3、GT-400-SG-PCI 卡一块(插在 PC机内部) 四、实验原理
该数控插补多轴运动控制系统是依据开放式数控系统原理构建的,其以通用计算机(PC)的硬件和软件为基础,采用模块化、层次化的体系结构,能通过各种形式向外提供统一应用程序接口的系统。开放式数控系统可分为 3类:(1)CNC 在 PC 中;(2)PC作为前端,CNC作为后端;(3)单 PC,双 CPU平台。 本实验采用第一类,把顾高公司的 GT-400-SG-PCI 多轴运动控制卡插入PC机的插槽中,实现电机的运动控制,完成多轴运动控制系统的控制。其优点如下:(1)成本低,采用标准 PC机;(2)开放性好,用户可自定义软件;(3)界面比传统的 CNC 友好。 图1为该系统的硬件构成图,运动平台机械本体采用模块化拼装,主要由普通PC机、电控箱、运动控制卡、伺服(步进)电机及相关软件组成。其主体由两个直线运动单元(GX系列)组成。每个GX系列直线运动单元主要包括:工作台面、滚珠丝杆、导轨、轴承座、基座等部分,其结构见图2。伺服型电控箱内装有交流伺服驱动器,开关电源,断路器,接触器,运动控制器端子板,按钮开关等。步进型电控箱则装有步进电机驱动器,开关电源,运动控制器端子板,船形开关等。 图1 数控插补多轴控制系统硬件构成
运动控制卡是一种基于PC机及工业PC机、用于各种运动控制场合(包括位移、速度、加速度等)的上位控制单元。 运动控制卡是基于PC总线,利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服电机的多轴协调控制的一种高性能的步进/伺服电机运动控制卡,包括脉冲输出、脉冲计数、数字输入、数字输出、D/A输出等功能,它可以发出连续的、高频率的脉冲串,通过改变发出脉冲的频率来控制电机的速度,改变发出脉冲的数量来控制电机的位置,它的脉冲输出模式包括脉冲/方向、脉冲/脉冲方式。脉冲计数可用于编码器的位置反馈,提供机器准确的位置,纠正传动过程中产生的误差。数字输入/输出点可用于限位、原点开关等。库函数包括S型、T型加速,直线插补和圆弧插补,多轴联动函数等。产品广泛应用于工业自动化控制领域中需要精确定位、定长的位置控制系统和基于PC的NC控制系统。具体就是将实现运动控制的底层软件和硬件集成在一起,使其具有伺服电机控制所需的各种速度、位置控制功能,这些功能能通过计算机方便地调用。现国内外运动控制卡公司有美国的GALIL、PAMAC,英国的翠欧,台湾的台达、凌华、研华,国内的雷赛、固高、乐创、众为兴等。 运动控制卡的出现主要是因为: (1)为了满足新型数控系统的标准化、柔性、开放性等要求; (2)在各种工业设备(如包装机械、印刷机械等)、国防装备(如跟踪定位系统等)、智能医疗装置等设备的自动化控制系统研制和改造中,急需一个运动控制模块的硬件平台; (3)PC机在各种工业现场的广泛应用,也促使配备相应的控制卡以充分发挥PC机的强大功能。 运动控制卡通常采用专业运动控制芯片或高速DSP作为运动控制核心,大多用于控制步进电机或伺服电机。一般地,运动控制卡与PC机构成主从式控制结
悬挂运动控制系统 【摘要】本系统采用凌阳16位单片机SPCE061A作为控制中心,由直流步进电机、红外收发对管、4*4键盘及中文液晶显示屏构成的悬挂运动控制系统。该系统能自由控制悬挂物体完成自行设定运动、画圆运动、沿黑线运动等,并能正确显示物体到达的坐标位置。 【关键词】SPCE061A单片机中文液晶显示屏逼近画圆算法 A Control System For Suspension Movement [Abstract]This design uses SPCE061A as the control core to build a suspension movement control system which consists of a DC step motor, infrared emitting tube, 4X4 keyboard and an LCD display screen for Chinese characters. The system can control the suspended objects to complete the movements set by itself, such as drawing the circles, moving along the black lines and doing other movements. It also can display the correct location of the coordinate where the object reaches. Key words: SPCE061A Single chip, Chinese characters LCD, Closing Algorithm for circle drawing 一、方案的选择与论证
nMotion运动控制卡使用手册 nMotion控制卡特点: 支持Mach3所有版本,包括目前最新版本. 支持所有Windows版本,包括Windows8 USB无需驱动,所有Windows版本即插即用,支持热插。 USB总线采用高档芯片磁耦隔离,真正有价值的隔离,不同于一般控制卡的光耦隔离输入输出,做到了超可靠性,绝对保证电脑USB的安全。同时保证的超强的EMC抗干扰能力。 单芯片,系统更精减,比一般的又芯片处理方式稳定性高出不知多少倍。 双核超高速CPU(单核最高主频204MHz),运算处理能力有极大冗余。并保证实现4轴联动下500KHz的脉冲输出频率,6轴联动的脉冲输出频率最高达300KHz,可接伺服/步进。 运动控制缓冲大小可设,保证最快插补周期也能稳定运行,电脑运行负荷过重时也能平稳运行。 拥有16路输入口,输入接口更简单,端口干湿接点均可,接线更为简单,干接点方法只要外部接一个物理开关到地线即可,所有16路输入口都有信号指示,为低电平时指示灯亮,调试简单明了。 拥有8路输出口,单路输出驱动能力500mA,可直接驱动直流继电器 PWM调速输出端口,可设PWM频率,0~1000连续可调 拥有测速功能,主轴实际转速在Mach3界面中实时显示,测量精准稳定。 电路板由工程师精心打造,设计水平一目了然。 带有256字节NVRAM空间,可保存6个轴的座标值,下次上电无需找零点。
目录 nMotion运动控制卡使用手册 (1) nMotion控制卡特点: (1) 目录 (2) 外观及安装孔机械尺寸: (5) 1 Mach3的软件安装 (6) 1.1安装准备 (6) 1.2 USB电缆的准备 (6) 1.3运动控制卡的软件安装 (7) 2 Mach3的软件配置 (8) 3.运动控制卡的硬件安装 (11) 3.15轴输出信号 (11) 3.2 16个输入端子(Input Port)引脚位置图 (12) 3.3 8路控制输出端子引脚位置图: (13) 4. 引脚功能描述 (14) 4.1 5轴输出端子(Axis Output Port )引脚功能描述 (14) 4.2 16 个输入端子(Input Port)引脚功能描述 (14) 4.3 输出端子(Out Port)引脚功能描述: (15) 5 USB运动控制卡的接线图 (16) 5.1 X、Y、Z、A、B轴输出 (16) 5.2 输入端口 (18) 5.3 各类规格传感器的接线和配置方法 (19) 5.4 输出端口 (20) 6 外部倍率旋钮 (21) 7 主轴调速PWM模拟量输出 (23) 7.2 主轴调速模拟输出接口原理图 (26) 7.3 主轴输出接线图(通用变频器的接线图) (27) 8 主轴测速 (27) 8.1 nmotion控制卡配置对话框 (27) 8.2 主轴转速显示 (28)
基于VC++的运动控制卡软件系统设计 在自动控制领域,基于PC和运动控制卡的伺服系统正演绎着一场工业自动化的革命。目前,常用的多轴控制系统主要分为3大块:基于PLC的多轴定位控制系统,基于PC_based的多轴控制系统和基于总线的多轴控制系统。由于PC 机在各种工业现场的广泛运动,先进控制理论和DSP技术实现手段的并行发展,各种工业设备的研制和改造中急需一个运动控制模块的硬件平台,以及为了满足新型数控系统的标准化、柔性化、开放性等要求,使得基于PC和运动控制卡的伺服系统备受青睐。本文主要是利用VC++6.0提供的MFC应用程序开发平台探索研究平面2-DOF四分之过驱动并联机构的运动控制系统的软件开发。 平面2-DOF四分之过驱动并联机构的控制系统组成 并联机构的本体如图1,该机构由4个分支链组成,每条支链的一段与驱动电动机相连,而另一端相交于同一点。该并联机构的操作末端有2个自由度(即X 方向和Y方向的平动),驱动输入数目为4,从而组成过驱动并联机构。 控制系统的硬件主要有4部分组成:PC机,四轴运动控制卡,伺服驱动器和直流电动机。系统选用的是普通PC机,固高公司的GT-400-SV-PCI运动控制卡,瑞士Maxon公司的四象限直流伺服驱动器及直流永磁电动机。伺服驱动器型号为4-Q-DCADS50/5,与驱动器适配直流电动机型号为Maxon RE-35。运动控制系统的
构成如图2所示。上位控制单元由PC机和运动控制卡一起组成,板卡插在PC机主板上的PCI插槽内。PC机主要负责信息流和数据流的管理,以及从运动控制卡读取位置数据,并经过计算后将控制指令发给运动控制卡。驱动器控制模式采用编码器速度控制,驱动器接受到运动控制卡发出的模拟电压,通过内部的PWM电路控制直流电动机RE-35的运转,并接受直流电动机RE-35上的编码器反馈信号调整对电动机的控制,如此构成一个半闭环的直流伺服控制系统。 1.1 GT-400-SV控制卡介绍 固高公司生产的GT系列运动控制卡GT-400-SV-PCI可以同步控制4个轴,实现多轴协调运动。其核心由ADSP2181数字信号处理器和FPGA组成,能实现高性能的控制计算。控制卡同时提供了C语言函数库和Windows下的动态链接库,可实现复杂的控制功能。主要功能如下: (1) PCI总线,即插即用; (2)可编程伺服采样周期,4轴最小插补周期为200us,单轴点位运动最小控制周期为25us; (3) 4路16位分辨率模拟电压输出信号或脉冲输出信号模拟量输出范围:-10V-+10V,每路课独立控制,互不影响;