1 Overview
1 概述
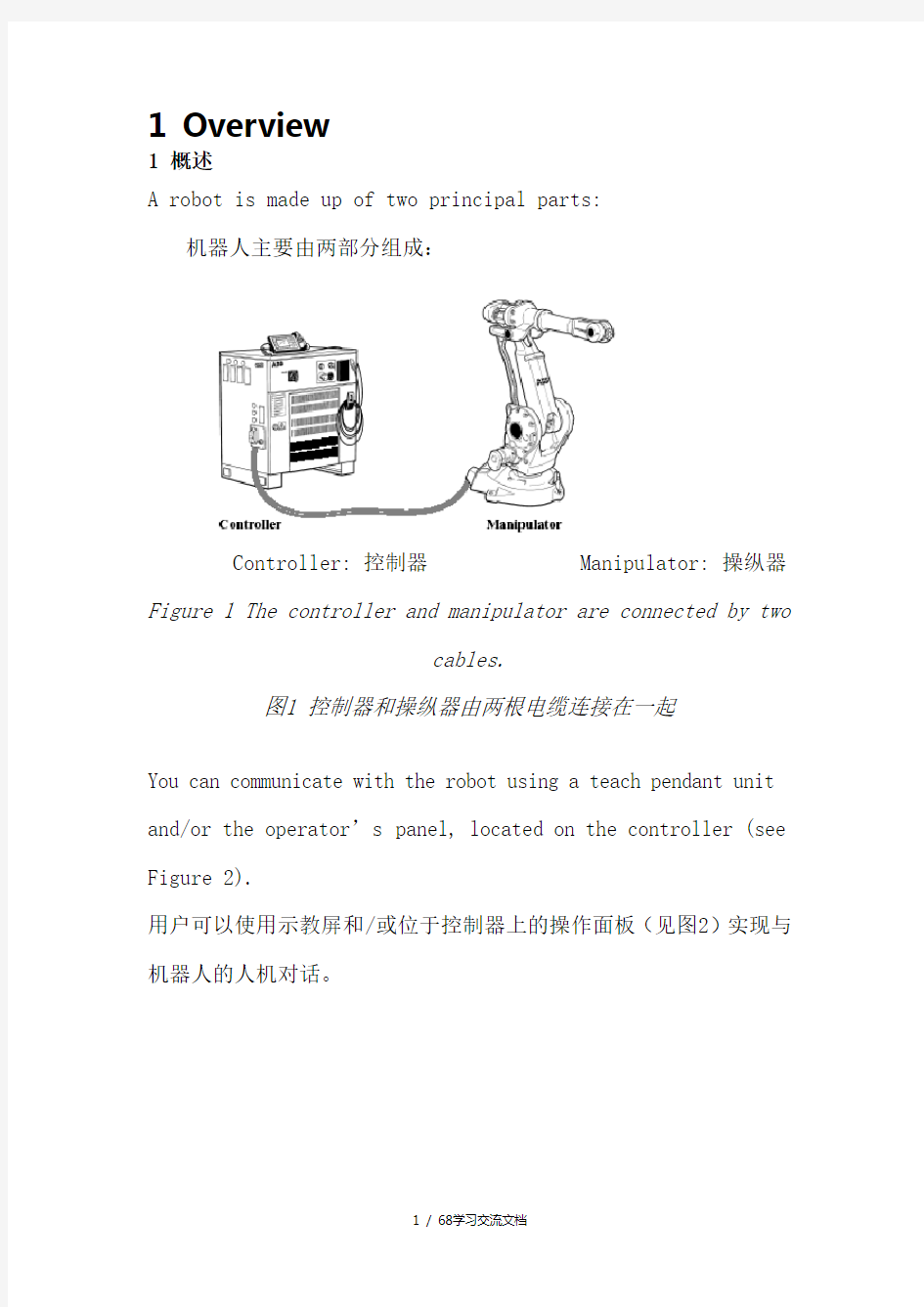
A robot is made up of two principal parts:
机器人主要由两部分组成:
Controller: 控制器 Manipulator: 操纵器Figure 1 The controller and manipulator are connected by two
cables.
图1 控制器和操纵器由两根电缆连接在一起
You can communicate with the robot using a teach pendant unit and/or the operator’s panel, located on the controller (see Figure 2).
用户可以使用示教屏和/或位于控制器上的操作面板(见图2)实现与机器人的人机对话。
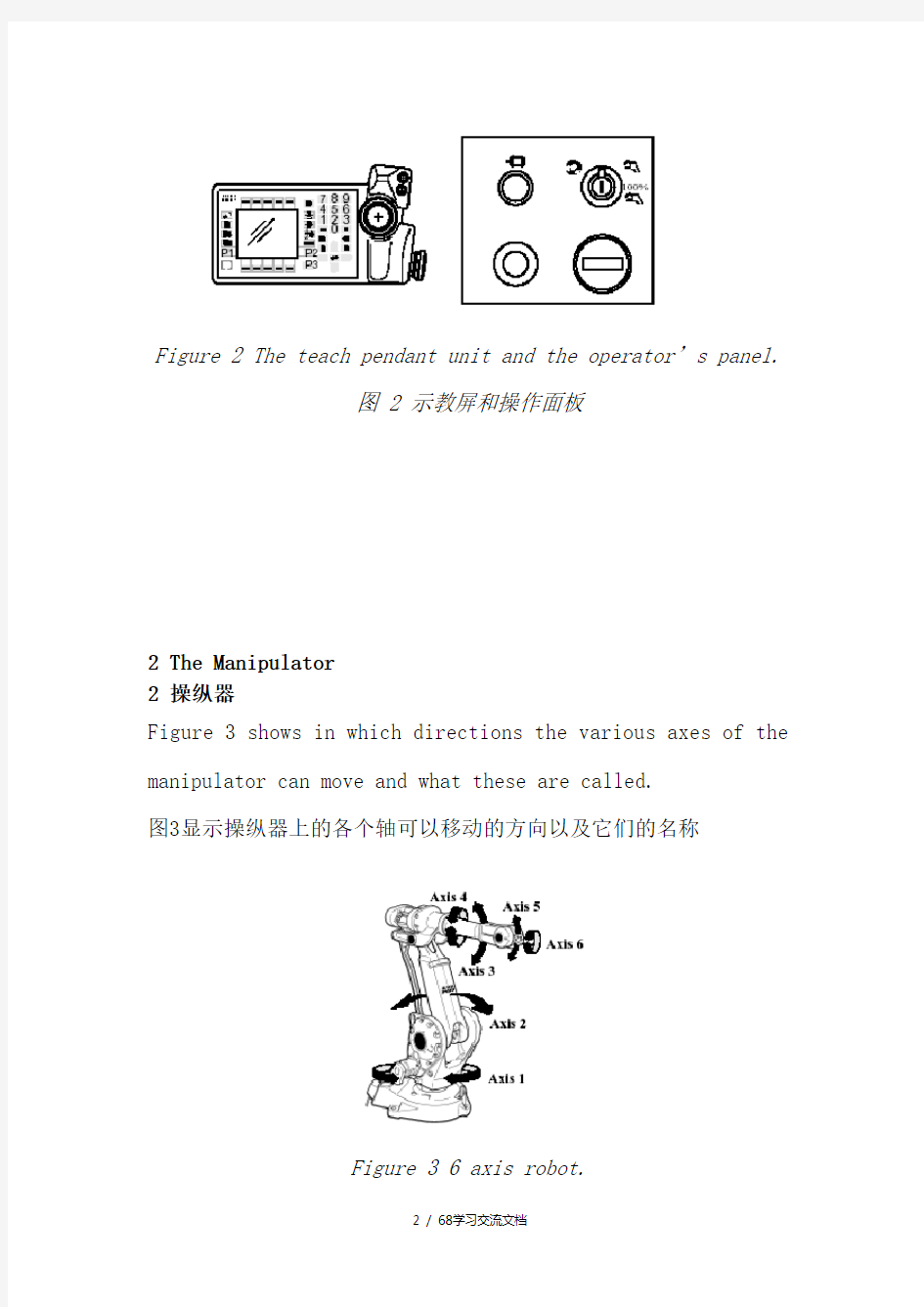
Figure 2 The teach pendant unit and the operator’s panel.
图 2 示教屏和操作面板
2 The Manipulator
2 操纵器
Figure 3 shows in which directions the various axes of the manipulator can move and what these are called.
图3显示操纵器上的各个轴可以移动的方向以及它们的名称
Figure 3 6 axis robot.
图 3六轴机器人
3 The Controller
3 控制器
Figure 4 illustrates the principal parts of the controller.图4展示控制器的主要组成部分。
Teach Pendant unit: 示教屏装置
Operator’s panel:操作面板
Mains switch: 总开关
Disk drive: 磁盘驱动器
Figure 4 Robot controller.
图4 机器人控制器
4 The Operator’s Panel
4 操作面板
The functions of the operator’s panel are described in Figure 5.
图5描述的是操作面板的功能。
Motors On button and indicating lamp:电机开动按钮及
指示灯
Operating mode selector: 操作模式选择器
Emergency stop: 急停按钮
If pressed in, pull to restore: 如果按进去了,拔出复
位
Duty time counter indicates the operating time for the
manipulator:
运行时间计时器显示操纵器的运行时间
Figure 5 The operator’s pa nel is located on the front of the
cabinet.
图5 操作面板位于机箱前面
MOTORS ON:
电机开动
In the MOTORS ON state, the motors of the robot are activated and the Motors On button is continuously lit.
在电机开动状态下,机器人的电机运行同时电机开动按钮指示灯
一直亮着。
Continuous light 指示灯灯持续亮着Ready for program execution 已做好准备执行程序
Fast flashing light (4Hz) 指示灯快速闪动(4Hz)The robot is not calibrated or the revolution counters are not updated. The motors have been switched on.
机器人没有校准或者旋转计数器没有更新。电机已经接通电源。
Slow flashing light (1Hz) 指示灯缓慢闪动(4Hz)One of the safeguarded space tops is active.
The motors have been switched off.
其中一个保护空间启动。电机已被断开。
Operating mode AUTOMATIC (production mode)
操作模式:自动(生产模式)
Used when running ready-made programs in production. It is not possible to move the robot with the joystick in this mode.
在生产过程中运行现成程序时使用。在这个模式下不能使用操纵杆移动机器人。
Operating mode MANUAL REDUCED SPEED (programming mode)
操作模式:手动减速度(编程模式)
Used when working inside the robot’s working area and when programming the robot. Also used to set the robot in MOTORS OFF state.
在机器人运行区间运行及设计机器人程序时使用。电机断开状态下也被用来设置机器人。
Operating mode MANUAL FULL SPEED (Option, testing mode)
操作模式:手动全速(选项,测试模式)
Used to test run the robot program at full programmed speed.用来以全速程控速度试运行机器人程序。
Emergency stop
急停
The robot stops –regardless of which state or mode the system is in –immediately when the emergency stop button is pressed. The button remains pressed in and, to turn to MOTORS ON again, must be returned to its original position.
无论系统处于哪个状态或模式,急停按钮按下时机器人立即停止运行。按钮保持内陷状态,而要重新返回电机开动时,则按钮必须回到原始位置。
Duty time counter:
运行时间计时器
Indicates the operating time for the manipulator.
显示操纵器的运行时间。
5 The Teach Pendant unit
5 示教屏装置
The teach pendant unit is described below (see Figure 6).
示教屏装置如下图所示(见图6)
TIMER定时器的使用 Kuka程序里的TIMER没有start, 只有stop ,stop赋值FALSE开始定时器,TRUE 停止定时器。 DEF main() INT A INI A=0 $TIMER[30]=0 //电石气当前值清零 $TIMER_STOP[30]=FALSE //TIMER[30]定时开始 ……. $TIMER_STOP[30]=TRUE //TIMER[30]定时结束 A=$TIMER[30] //采集当前值赋值给A END 复制粘贴的使用 下方字菜单按钮依次为 新选定备份存档删除打开编辑 选中一个程序,点击备份此时产生一个新建的 程序,重命名即可。 打开程序后,下方子菜单按钮依次为 更改、指令、动作、打开/关闭、语句行选 择、Touchup、编辑。 如果需要剪切某个动作,将光标移动至改行,点击 编辑, 打开编辑器,如左图所示,点击剪切,再将 光标移动至需要粘贴的位置,点击编辑->粘贴。 复制的操作方法类似。
更改机器人控制柜的IP地址 主菜单->配置->用户组->专家模式,输入密码kuka确认主菜单->投入运行->网络配置,如下图所示 地址类型:固定IP地址 点击其他按钮,再点击内部子网子菜单后出现如下图所示
设置IP时注意,内网出现的网段请不要占用。 修改完成后点击保存,提示冷启动后才能应用,必须关机重启。 示教器进入windows桌面 进入专家模式 主菜单->投入运行->售后服务->HMI最小化 操作按照windows操作方式操作。可以用于打开U盘复制操作文件。改变软件限位 主菜单->投入运行->售后服务->软限位
工业机器人培训总结Revised on November 25, 2020
工业机器人培训总结 在信息科学技术飞速发展的今天,随着人力成本逐渐的上升,工业机器人逐渐取代人力成为流水线上行的“操作员”已成为必然趋势。 为此今年7月底至8月初广东三向培训学院面向全国广大技工院校教师组织了“工业机器人应用与维护”项目培训班。同时本人有幸被学院指派参加了此次培训。这次培训对于我个人而言,我认为这次培训班举办的非常有意义,非常有必要,因为它不仅让我充实了更多的理论知识,更让我开阔了视野,解放了思想。 本次培训班主要培训学习的内容是“工业机器人应用与维护”,分别学习了解瑞典的ABB和日本三菱的六轴机器人的软件使用,及一些典型的机器人轨迹运动、搬运、码垛及工件装配等基本编程操作技能。 工业是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据制定的原则纲领行动。机器人可以分为:娱乐性机器人,服务用机器人,工业用机器人。此次学习主要对工业机器人的编程软件进行了培训。在国外,机器人大约在20世纪50年代末就已经应用在工业生产中,但是在中国,只有少数几家大型企业有采用机器人操作。随着人口红利的逐渐下降,企业用工成本不断上涨,工业机器人正逐步走进公众的视野。有专家认为,
人口红利的持续消退,给机器人产业带来了重大的发展机遇;在国家政策支持下,产业有望迎来爆发期。 随着企业大量使用机器人也催生出大量需求的懂得组装操作和维修的人才,为此全国大多数职业院校都开办了相关专业,为广大企业培训相关人员。 这次培训班的学习,是我们每一个参训者都收益良多,一段在职教领域具有先进性和代表性的专业理论知识和技能操作的学习培训,给我们实实在在的专业提升。 通过这次培训,我不但夯实了理论基础,提高了专业技能,还与同行进行了交流,分享了教学经验,真实受益匪浅。进一步增强了自己对教学的责任心和责任感,从别的老师身上学到很多东西,包括他们对教学工作严谨负责的态度、精益求精的精神,以及他们宝贵的教学方法和教学经验。我也希望以后继续有机会接受这样的培训,以便更好地完成教学任务,更加努力地提高自己职教理论水平和专业技能素质,坚定不移地从事职业教育。 这段时间的学习、实践,使我更加清晰的看到了自身知识和能力的不足,作为一名青年教师,应该更加客观地去重新认识、评价自我,能让我们产生一种紧迫感和危机感,又激发了我们潜心思考自身的发展问题。不断地去提高自身素质,争当一名教学理念新、奉献精神强、师德高尚、有精湛专业技能的“双师型”素质的专业教师。增强以后适应社会、服务社会的能力,并更好地适应教学的需要,培养出更适应社会需要的人才。
机器人安全操作规程 一.示教和手动机器人 1)严禁非专业培训人员手动操作机器人,非设备维护人员禁止更改机器人速度及坐标。 2)严禁操作者手套操作示教盘和操作盘。 3)如需要手动控制机器人时,应确保机器人动作范围内(无任何人员或障碍物)示教器线缆不能严重绕曲成麻花状和与硬物摩擦,以防内部线芯折断或裸漏。将速度由慢到快逐渐调整,采用较低的倍率速度以增加对机器人的控制安全,避免速度突变造成伤害或损失。 4)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。5)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。 6)机器人周围区域必须清洁、无油,水及杂质等。 二.生产运行 1)在开机运行前,须知道机器人根据所编程序将要执行的全部任务。 2)须知道所有会左右机器人移动的开关、传感器和控制信号示、教器和控制柜位置和状态。 3)必须知道机器人控制器和外围控制设备上的紧急停止按钮的位置,准备在紧急情况下按这些按钮。 4)机器人动作速度较快,存在危险性,人员避免停留在机
器人装箱位置附近及护栏旁,所有操作人员一律不得接近机器人运动的轨迹,设备维护人员应负责维护工作。(严禁非培训人员进入机器人工作区域) 5)永远不要认为机器人没有移动其程序就已经完成。因为这时机器人很有可能是在等待让它继续移动的输入信号 6)中途短暂休息离开设备工作区域前负责人应按下停止按钮;中途长时间休息离开设备工作区域前负责人应停止机器人及真空泵(开工时先提前一分钟开启真空泵再复位机器人)。 7)严禁在控制柜内随便放置(配件、工具、杂物、安全帽等)以免影响到部分线路,造成设备的异常 8)严格遵守并执行机器的(日常维护) 三.操作者平时操作时应注意的事项: 1)打开机器人总开关后,必须先检查机器人在不在原点位置,如果不在,请手动跟踪机器人返到原点,严禁打开机器人总开关后,机器人不在原点时按启动按钮启动机器人。2)打开机器人总开关后,检查外部控制盒急停按钮、真空泵按钮有没有按下去,如果按下去了就先打上来,然后点亮示控制柜上的伺服灯,再去按启动按钮启动机器人,严禁打开机器总开关后,外部急停按钮按下去生效时,按启动按钮启动机器人。如果当外部急停按钮按下去生效时,按启动按钮启动机器人时,机器人会出现单步动,必须查找按下急停
工业机器人培训总结 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】
工业机器人培训总结 在信息科学技术飞速发展的今天,随着人力成本逐渐的上升,工业机器人逐渐取代人力成为流水线上行的“操作员”已成为必然趋势。 为此今年7月底至8月初广东三向培训学院面向全国广大技工院校教师组织了“工业机器人应用与维护”项目培训班。同时本人有幸被学院指派参加了此次培训。这次培训对于我个人而言,我认为这次培训班举办的非常有意义,非常有必要,因为它不仅让我充实了更多的理论知识,更让我开阔了视野,解放了思想。 本次培训班主要培训学习的内容是“工业机器人应用与维护”,分别学习了解瑞典的ABB和日本三菱的六轴机器人的软件使用,及一些典型的机器人轨迹运动、搬运、码垛及工件装配等基本编程操作技能。 工业是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据制定的原则纲领行动。机器人可以分为:娱乐性机器人,服务用机器人,工业用机器人。此次学习主要对工业机器人的编程软件进行了培训。在国外,机器人大约在20世纪50年代末就已经应用在工业生产中,但是在中国,只有少数几家大型企业有采用机器人操作。随着人口红利的逐渐下降,企业用工成本不断上涨,工业机器人正逐步走进公众的视野。有专家认为,
人口红利的持续消退,给机器人产业带来了重大的发展机遇;在国家政策支持下,产业有望迎来爆发期。 随着企业大量使用机器人也催生出大量需求的懂得组装操作和维修的人才,为此全国大多数职业院校都开办了相关专业,为广大企业培训相关人员。 这次培训班的学习,是我们每一个参训者都收益良多,一段在职教领域具有先进性和代表性的专业理论知识和技能操作的学习培训,给我们实实在在的专业提升。 通过这次培训,我不但夯实了理论基础,提高了专业技能,还与同行进行了交流,分享了教学经验,真实受益匪浅。进一步增强了自己对教学的责任心和责任感,从别的老师身上学到很多东西,包括他们对教学工作严谨负责的态度、精益求精的精神,以及他们宝贵的教学方法和教学经验。我也希望以后继续有机会接受这样的培训,以便更好地完成教学任务,更加努力地提高自己职教理论水平和专业技能素质,坚定不移地从事职业教育。 这段时间的学习、实践,使我更加清晰的看到了自身知识和能力的不足,作为一名青年教师,应该更加客观地去重新认识、评价自我,能让我们产生一种紧迫感和危机感,又激发了我们潜心思考自身的发展问题。不断地去提高自身素质,争当一名教学理念新、奉献精神强、师德高尚、有精湛专业技能的“双师型”素质的专业教师。增强以后适应社会、服务社会的能力,并更好地适应教学的需要,培养出更适应社会需要的人才。
机器人从业所必学的专业知识 机器人是一个复杂的系统工程,需要各方面的人才,如机械,电子,通信,自动化等等,如果是行业专用机器人还会涉及到材料、物理、化学等等。在本科阶段接触到的都是机器人的基础知识,一般不会设计到机器人系统的研究,研究生期间可以接触到具体的机器人研究工作。 与机器人相关的专业也比较广泛,和自动化有关系的专业向机器人方向会比较容易,比如,机械设计及其自动化、机械自动化、电气自动化等等,因为这些专业都将会学习到机器人从业所必学的专业知识。 1、自动控制原理。自动控制是机器人运动的基础,别看人类运动的很简单,要让机器人和谐的运动,需要大量的传感器的测量,并进行计算和模拟,最后根据这个,调整参数,进行干扰补偿、负反馈前后两种串联补偿等等。 2、智能技术。主要学各种专家系统、机器学习、智能计算、启发式搜索、分布式人工智能、许许多多智能算法如蚁群算法、神经网络。 3、机器人学。讲解机器人运动中的数学计算,涉及空间描述,广义坐标,瞬态运动学,雅可比矩阵显式(线性代数基础)、立体视觉、轨迹生成、关节空间动力学、拉格朗日方程、控制学(就是自控)、顺应性。 4、单片机开发。要让机器人按照自己的想法运动,必须对其写入程序,对于不太复杂的机器人控制,单片机是完全可以满足要求的,当然要写程序的还需要熟悉单片机的编程语言(C语言、汇编语言等等) 5、电机拖动。机器人的运动是靠电机拖动的,因此在机器人设计的过程中你需要了解电机的原理,了解调速、启动、电磁关系。 当然要想设计出高水平的机器人,只掌握这些知识还是不够的,行业机器人的设计中还需要相关的行业知识和自己的天赋和悟性。 深圳稻草人机器人应用职业培训中心,是以工业机器人集成应用、对工业机器人应用技术进行二次开发应用及专业开展机器人应用开发培训的机器人职业培训中心。自2012年运行以来,为机器人生产商、机器人设备公司、大型机器人应用类生产型企业等输送了30批次专业机器人编程应用技能人才,稻草人机器人应用职业培训中心根据机器人专业的课程特点,研发了系列机器人应用课程,包括机器人操作、编程、维修、高级编程、仿真、集成系统设计等多种课程。
机器人教案合集 课题:多彩的机器人世界教学目标第5周第1课时 1. 掌握机器人的定义知识与 2. 了解机器人的发展历程及用途技能 3.认识机器人的分类锻炼学生科学对待生活中遇到的问题、培养学生区别人工智能和人类智能的过程与能力、培养学生观察能力、思维能力和联想能力、培养学生的用科学的方法方法解决问题能力。情感态有意识培养学生的讨论、及合作意识、培养他们热爱科学、学习科学的精神。与价值观教学重点:机器人的定义教学难点机器人的分类教学过程学生活动一:导入: 观看展示的文字有图机器人技术的应用非常的广泛,大到神州七号,航空母舰,小到感应灯.自动冲水水龙头.那么你们知道到底什么是机器人;以及他们有哪些分类吗?片,对机器人有初步的了解。并可以上网自己二:新课: 一、这节课主要是让学生了解机器人的定义:找一些自己感兴趣的机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协实例。同能力,是一种具有高度灵活的自动化机器。二、并针对机器人的具体情况找一些图片,让学生了解在我们的现实生活中存在的活生生的机器人世界三、让学生了解机器人的分类:工业机器人娱乐机器人
服务机器人军用机器人教育机器人四、最后展示一下未来机器人可能的样子: 教学成果展示学生自己上网找相关信息的照片:评价这节课主要让学生了解机器人的一些知识,了解我们这个世界对机器人的使用。教学机器人初识:反思:这节课主要是了解世界人的世界,在教学的时候有点过于注重基础知识的掌握,要敢行放开,让学生通过网络更多的接触才好,限于学校的现有的情况,更多的要注重学习兴趣的养成,可以让学生在课下的时候多关注此类信息,特别要多注意日本的机器人发展,它代表着世界自动化的发展进度。课题:我的真实机器人教学目标 第6周第2课时知识与 1、了解教学机器人的马达及指示灯技能 2、可以控制马达与指示灯通过制作一个实例让机器人动起来,让学生感知神奇的机器人,过程与方法有意识培养学生的讨论、及合作意识、培养他们热爱科学、学习科学的精神。兴激发学生的学习热情,培养对机器人的兴趣编写让机器人动起来的程序对马达与指示灯的控制。教学过程学生活动情感态与价值观教学重点:教学难点一:导入: 观看展示的文字有图先制作一个机器人让机器人动起来,然后让学生出题机器人如何运动,并按学生的题目要求写程序,现场演示机器人的动作。片,对机器人有初步的二:新课: 了解。并可以上网自己一、
控制器TP(Teach Pendant)
工作原理:焊接机器人是工业机器人的一种,其基本工作原理是示教再现,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数、焊接参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个起动命令,将精确地按示教动作,一步步完成全部操作,实现示教与再现。 1.TP的作用 ⑴点动机器人⑵编写机器人程序⑶试运行程序⑷生产运行⑸查阅机器人的状态(I/O 设置,位置,焊接电流) 2.TP面板上的键 Status Inicators(状态指示灯):指示系统状态。 ON/OFF Switch(开关):与 DEADMAN 开关一起启动或禁止机器人运动。 PREV:显示上一屏幕。 SHIFT key(键):与其它键一起执行特定功能。 MENUS key(键):使用该键显示屏幕菜单。 SELECT key(键):使用该键选择程序。 Cursor keys(光标键):使用这些键移动光标。 STEP key(键):使用这个键在单步执行和循环执行之间切换。 RESET key(键):使用这个键清除告警。 BACK SPACE key(键)::使用这个键清楚光标之前的字符或者数字。 ITEM key(键):使用这个键选择它所代表的项。 ENTER key(键):使用该键输入数值或从菜单选择某个项。 POSN key(键):使用该键显示位置数据。 ALARMS key(键):使用该键显示告警屏幕。 QUEUE key(键):使用该键显示任务队列屏幕。 APPL INST key(键):使用该键显示测试循环屏幕。 SATUS key(键):使用该键显示状态屏幕。 MOVE MENU key(键):使用该键来显示运动菜单屏幕。 MAN FCTNS key(键):使用该键来显示手动功能屏幕。 Jog Speed keys(键):使用这些键来调节机器人的手动操作速度。 COORD key(坐标系键):使用该键来选择手动操作坐标系。 Jog keys(键):使用这些键来手动手动操作机器人。 BWD key(键):使用该键从后向前地运行程序。 FWD key(键):使用该键从前至后地运行程序。 HOLD key(键):使用该键停止机器人。 Program keys(程序键):使用这些键选择菜单项。 FCTN key(键):使用该键显示附加菜单。 Emergency Stop Button(紧急停止按钮):使用该键停止正在运行的程序,关闭机器 人伺服系统的驱动电源,并对机器人实施制动。 TP 上的开关
1 Overview 1 概述 A robot is made up of two principal parts: 机器人主要由两部分组成: Controller: 控制器 Manipulator: 操纵器Figure 1 The controller and manipulator are connected by two cables. 图1 控制器和操纵器由两根电缆连接在一起 You can communicate with the robot using a teach pendant unit and/or the operator’s panel, located on the controller (see Figure 2). 用户可以使用示教屏和/或位于控制器上的操作面板(见图2)实现与机器人的人机对话。
Figure 2 The teach pendant unit and the operator’s panel. 图 2 示教屏和操作面板 2 The Manipulator 2 操纵器 Figure 3 shows in which directions the various axes of the manipulator can move and what these are called. 图3显示操纵器上的各个轴可以移动的方向以及它们的名称 Figure 3 6 axis robot.
图 3六轴机器人 3 The Controller 3 控制器 Figure 4 illustrates the principal parts of the controller.图4展示控制器的主要组成部分。 Teach Pendant unit: 示教屏装置 Operator’s panel:操作面板 Mains switch: 总开关 Disk drive: 磁盘驱动器 Figure 4 Robot controller. 图4 机器人控制器 4 The Operator’s Panel 4 操作面板 The functions of the operator’s panel are described in Figure 5. 图5描述的是操作面板的功能。