
译文一:
倒立摆系统
倒立摆系统是一种广泛应用的实验平台,在该平台上,可以采用反馈控制理论镇定不稳定的开环系统使之达到稳定状态。这个问题的第一个的解决方法是在Roberge[1]的一篇名为《机械密封》的论文中做出了描述。随后,它作为一种不稳定系统的范例被用于许多报刊书籍。
Siebert[2,177-182页]运用劳斯判据对这个系统做了完整的分析,通过乘以一个特征方程作为S 的多项式的系数的研究。虽然正确,但这种做法是不必要的。此系统就是一种理想的根轨迹分析范例。
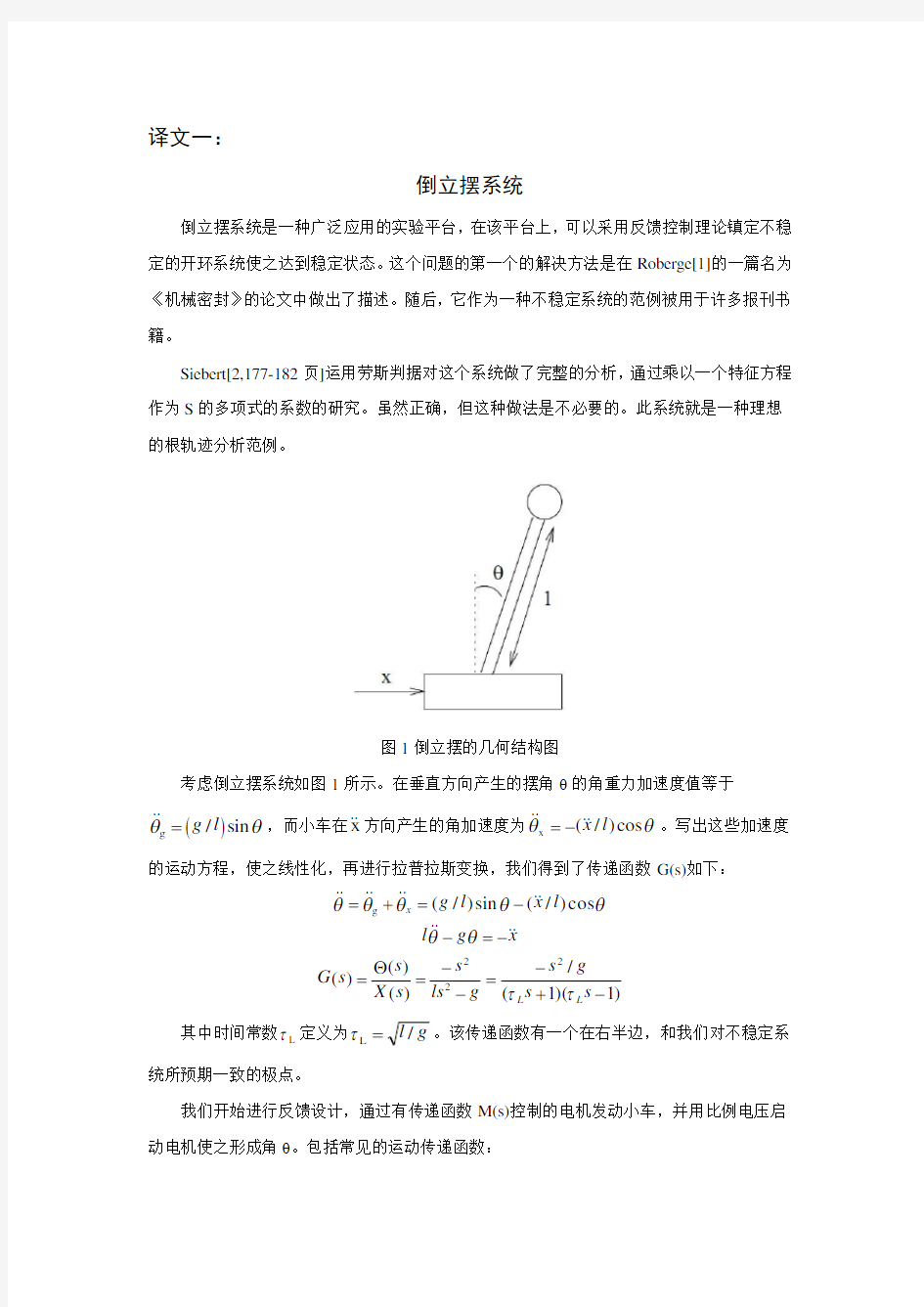
图1倒立摆的几何结构图
考虑倒立摆系统如图1所示。在垂直方向产生的摆角θ的角重力加速度值等于
()θθsin /g
l g = ,而小车在x 方向产生的角加速度为θθcos )/(x l x -=。写出这些加速度的运动方程,使之线性化,再进行拉普拉斯变换,我们得到了传递函数G(s)如下:
)
1)(1(/)()()(cos )/(sin )/(222g -+-=--=Θ=-=--=+=s s g s g ls s s X s s G x
g l l x l g L L x
ττθθθθθθθ
其中时间常数L τ定义为g l /L =τ。该传递函数有一个在右半边,和我们对不稳定系统所预期一致的极点。
我们开始进行反馈设计,通过有传递函数M(s)控制的电机发动小车,并用比例电压启动电机使之形成角θ。包括常见的运动传递函数:
)
1()()()(+==s s k s V s X s M M M τ
图2 摆杆和电机的根轨迹图,)()()(s G s M s L =
通过函数G(s),我们得到了一个极点保持在右半边的根轨迹。使用规范化编号,我们得到了如图2所示的根轨迹图。
为了稳定系统,我们需要摆脱剩余的零点起源,以便极点能在左半边的正实轴移动形成轨迹。因此我们的补偿器必须包括一个在原点的极点。然而,我们必须平衡增加的补偿器极点和一项附加零,以便是少于零点数量的极点数量在远离根轨迹渐近线的±90°的为止仍然等于两个(否则,渐近线将变成±180°和±60°。它将最终导致极点产生在右半边)。因此,我们用一个补偿器
s
s s K K K ττ1)(+= 同时我们假定L K M τττ<<。该系统的方块框图如图3所示,而根轨迹图则如图4(请注意:只要将G(s)倒置,我们就能画出正数总和结点的框图)。
图3补偿系统的框图
图4 摆杆综合补偿的根轨迹图,)()()()(s G s M s K s L =
Siebert 解释说这个积分器所需的物理解释是根据我们所用的二阶压控马达而产生的。没有积分常数角误差只能实现车的恒速运动,但这不足以使摆杆直立。为了能在摆杆的“下面”,小车必须被加速。因此,我们需要一个积分器。
该系统现在已经的确稳定了,但是,它的根轨迹仍非常接近j ω轴。结论是闭环系统有非常低利润的稳定性并且会有很振荡的反应的障碍。一个简单的解决问题的办法是降低电机时间常数和速度反馈,使其质心的渐进线移动到左边。该系统的根轨迹图则如图5所示。
图5改善点击时间常数的摆杆根轨迹图
不幸的是,该系统仍然存在一个很微妙的问题。考虑从)(t c θ到)(t x 的闭环传递函数如
图3所示。
))
1)(/()1)(1()1)(1((1)()()(1)()()()(22222++-+-+=-=Θs g k s s s s k s s G s M s K s M s K s s X K M L M K L K M c ττττττ 在原点的极点是系统受到漂移。通过这些积分器,莫非定律保证)(t x 的反应时间会无限制地增长,而小车将会迅速的抛出轨道。
解决办法就是在电机和补偿器周围加上正反馈。该反馈回路将会影响原点到极点的运动,从而防止零极点取消来源是无法控制的模式。系统现在的根轨迹图则如图6所示。
图6摆杆在补偿位置的根轨迹图
Siebert 指出,这种正反馈会使电机最初在)(t x 有严重的偏差,但这种行为是理想的效果。为了使手上的尺保持平衡,当尺移到右边时,你必须首先迅速将你的手向左急转,指向尺的右边,以便当你的手赶上尺子,你必须同时将你的手和尺移到右边。
物理上,摆杆会稳定在离垂直方向的一个小角度,这样它总是指向轨道的中心。因此,摆杆总是“落”在轨道的中心,而唯一可能的平衡点就是在轨道中间的垂直摆杆。如果小车在轨道中心的左边,控制稳定摆杆指向右,以便它之后向右靠一点。为了赶上倒下的摆杆,小车必须向右移动(返回到中心)。这样就会运动到理想状态!
译文二:
倒立摆
关键词:倒立摆,模型,PID控制,LQR控制
倒立摆是什么?还记得当你是个孩子时你曾用你的食指或者掌心设法去平衡一把扫帚柄或者棒球棍吗?你必须不断地调整你的手的位置以保持对象的垂直。一个倒立摆在本质上就是做相同的事情。然而,它会受限制因为它只能在一定范围内移动,虽然你的手可以上升、下降、斜向一边等等。检查录象提供的画面来观察倒立摆是如何确切地工作的。
一个倒立摆是个物理设备它包括一个圆柱体的棒子(通常是铝的)可以在一个支点周围振荡。这个支点是安在一个车架上,它的转动方向是水平的偏转。小车是由一个马达控制的,它可以运用于一个变力。棒子会有自然的趋势从最高的竖直位置下落,那是一个不稳定的平衡位置。
实验的目标是使摆(棒子)稳定在最高的竖直位置。这是有可能的只要运用通过马达的小车一个力该力可以与“自由”摆的动力学抵消。这个正确的力必须通过计算测量水平偏转的瞬时值和摆的角度(获得两个电位计)。
倒立摆是干什么的?就好象扫帚柄,一个倒立摆是一个天生的不稳定系统。力度必须被严格地应用以保持系统的完整性。为了实现它,严格的控制理论是必须的。倒立摆在求数值和各种控制理论的比较中是必要的。
倒立摆是一个控制器系统中的一个传统的例子(既不困难也不是没有价值)。尽管它是仿真和实验来显示不同控制器的性能(举例来说PID控制器,状态空间控制器,模糊控制器)。
实时倒立摆被作为一个基准,去测试软件在状态空间控制器运算法则下的有效性和性能,也就是实用的操作系统。事实上运算法则是通过数值点实现的该数值点看作一组互助的协同操作的任务,它是周期性的通过核心的活动,它执行不同的计算。这些任务如何活动的方法(举例来说激活命令)被称作任务的时序安排。很明显每个任务的时序安排对控制器的一个好的性能是至关紧要的,因此对一个摆的稳定性是有效的。如此倒立摆是非常有用的在决定是否一个特殊的时序安排的选择比另一个好,在哪个情形下,在什么程度内等等。
为倒立摆建模。通常倒立摆系统建模成一个线形系统,因此模型只对小幅度摆动的摆才有效。
通过梯形输入隶属函数的使用和适当的作图法和推论方法,这将说明那是有可能遵循规
则区域劝导的输入变量仿射函数的隶属函数。我们提出线形逆模糊化算法它能这个区域劝导仿射结构和产生一个块仿射控制器。一个特殊的系统的参数调节方法将会被给定它允许把这个控制器调节成一个可变的结构相似的控制器。我们将比较这个区域劝导仿射控制器和一个模糊的可变结构的控制器通过应用一个倒立摆控制。
我们将从系统设计开始;分析二级倒立摆的控制行为。随后我们将展示如何为系统设计一个模糊控制装置。我们将描绘一个控制曲线当使用模糊控制装置时它与一个常规控制器是如何的不同。最后,我们将讨论如何使用这个曲线去定义标志还有变量的隶属函数,还有就是如何为控制器创立一套规则。
“倒立摆、分析、设计和执行”是由一个MA TLAB方程和内容的收藏的,还有SIMULINK 模型,对分析倒立摆系统和设计控制系统是很有用的。这个报道MA TLAB文件收藏是由少量的控制系统分析的实际任务而发展的,设计和发展实际问题。这分派的倒立摆的问题是一个控制系统的实验室工作的一部分。
倒立摆是最重要最经典的控制工程问题中的一个。帚平衡(车载的倒立摆)是一个著名的非线形例子,不稳定的控制问题。这个问题越来越复杂当一个柔韧的帚代替一个刚硬的帚被使用。复杂的问题的真实度和难度在控制中随着弹性而增长。这个问题已经引起调度工程师的兴趣并展开研究。
倒立摆的控制是一个控制工程的方案基于火箭的飞行模拟或者导弹飞行的初始状态。这个学习的目的是稳定倒立摆这样小车的位置在轨道上被控制得快速和准确以使摆在这一装置下始终垂直在它的倒立位置。
这个实际的运动是一个分析的表现还有实际的执行在解决问题的结果中在本文中,“非线形和不稳定系统的坚固的控制器:“倒立摆”和“柔韧的帚平衡”,其中这个复杂问题分析和一个简单的有效的解决方案被引出法定轨道通过确定的精确性是机器控制的一个主要任务。控制通常是基于一个系统的数学模型。模型不是一个准确的实体表现,模型的误差是不可避免的。此外,我们可以特意使用一个简化的模型。在这篇论文中,构造好的和未构造好的不确定因素是主要的兴趣所在,也就是说模型的误差导致参数变化和未模型化的模式,尤其是摩擦力和敏感元件的力度,被忽视的时间延迟等等。
不正确的模型和高性能的需求要求控制器非常坚固。滑模控制器(SMC)是基于变结构控制使用的如果模型结构中的错误在已知的范围内跃进。然而,一个SMC有一些缺点,涉及控制输入信号的振动。通常这个现象是令人不快的,它会引起额外的控制作用从而导致激励者穿戴的增加和未建模动力学的刺激。
削弱这个令人不快的效果的尝试导致坚固的特性的变化。这是一个众所周知的难题并且广泛的在文献中经过处理。为了在继电器控制中获得滤波中断滑模控制器的方案已经被提出了。
另外一个重要的论点限定了SMC的实际应用性就是创新的控制定律导致上面的不确定因素的范围。在实践中通常大部分最差的案例在控制定律下执行确没有发生并且作为结果的大的控制输入变得不必要和不经济的。
在这篇论文中我们提出一个机电系统中分散震动控制器的设计方法除了滑模震动控制器结构和干扰转矩的估算。估算的精确性是这个计划中最中坚的评定参数,与上面的不确定的范围正好相反。因此,在评估的精确性中控制一些误差动力学的条件减少了一些不确定性(就如同在传统的SMC中)。结果在没有超越传统的控制中是一个较好的跟踪精度。
模糊控制装置的实验的健全的性质难以用理论去证明它们的综合仍然是一个未解决的问题。最终控制器的非线性性质来源于各级模糊控制的控制器,显著地逆模糊化方法(诸如中心区)。通常,模糊控制器有一个区域劝导的性质是模糊化级数给的输入空间。本地控制设计这些区域结合成集使最终的全球控制实现。一个级数空间的分割可以在控制器有区域劝导的常数参数中找到。此外,每个模糊控制器调整参数(即形状以及输入输出的变量的值的隶属函数)会在同一时间在某些区域影响参数的值。在特殊情况下开关线将相平面分成一个区域那个区域中控制是正的反之另一边是负的,模糊控制器可以视为一个可变结构的控制器。这类的模糊控制器可以吸收到可变结构控制器边界层,其中稳定性定理存在,而是一个非线形开关面。
我们将从系统设计开始,分析二级倒立摆的控制行为。随后我们将展示如何为系统设计一个模糊控制装置。我们将描绘一个控制曲线当使用模糊控制装置时它与一个常规控制器是如何的不同。最后,我们将讨论如何使用这个曲线去定义标志还有变量的隶属函数,还有就是如何为控制器创立一套规则。
在任何控制问题的陈述中,在控制的设计发展中现行的设备和数学模型之间总是有着明显的差异。这种失谐也许应归于非建模动力学中,通过一个简洁的模型系统参数或者复杂设备的近似值会发生变化。工程师必须确定作为结果的控制器在实际中有能力制造必须的性能指标不管是设备还是模型的失谐。这已经导致了在所谓坚固的操纵方法的发展产生一个强烈的兴趣此方法能设法解决这个问题。坚固的操纵控制器设计的一个特殊的方法就是所谓的滑模控制方法。
滑模控制是可变结构控制系统(VSCS)的一个特殊的类型。一个VSCS是由一套反馈
控制定律和一个决策规则表现出来的。决策规则,条件是开关方程,将输入估计成正确的系统特性并且产生一个输出精确的反馈控制器使之可以及时地被使用。一个可变结构系统,被认为是各子系统的结合其中每个子系统有一个确定的控制结构并且结果是对系统结构给定的区域是适用的。介绍这个额外的系统的复杂性的优势之一就是可以将系统中复合结构的有用的性质组合起来。此外,该系统可能被设计成拥有新的性质而且不是单独地应用与复合结构的某一方面。前苏联在20世纪50年代末最先开始利用这些自然的想法。
在滑模控制中,VSCS被设计成操作并强迫系统状态位于邻近的开关方程中。这种方法有两个主要的优点:第一,系统的动态性能适应于开关方程的特殊选择;第二,闭环响应完全不受不确定的特殊种类的影响。后面的恒定性质明显地使方法论在坚固的操纵方法中有一个适当的侯选对象。另外,立即指定性能的能力使得滑模控制从设计观点看变得有价值。
滑模设计处理两种结构组成。第一个包括开关方程的设计所以滑行的动作满足设计规范。第二个涉及到控制规则的选择该规则将使开关方程在系统状态中变得有价值。注意这个控制规则并不是必然不连续的。
我们将提供读者一个彻底的滑模控制领域的基础并且适合大学生使用的经典控制理论和一写状态空间方法的知识的基础知识。从这些基础中,许多先进的理论的成果在不断发展。因而发生的设计规程强调需要用 Matlab软件。充分的处理过的设计实例是一个额外的性质的指示。工业的案例学习,介绍了滑模控制执行的成果,被用于阐述成功的实际的理论上的应用。
原文一:
The Inverted Pendulum System
The inverted pendulum system is a popular demonstration of using feedback control to stabilize an open-loop unstable system. The first solution to this problem was described by Roberge [1] in his aptly named thesis, "The Mechanical Seal." Subsequently, it has been used in many books and papers as an example of an unstable system.
Siebert [2, pages 177~182] does a complete analysis of this system using the Routh Criterion, by multiplying out the characteristic equation as a polynomial of s and studying the coefficients. Although correct, this approach is unnecessarily abstruse. This system is the ideal root-locus
analysis example.
Figure 1: Geometry of the inverted pendulum system
Consider the inverted pendulum system in Figure 1. At a pendulum angle of μ from vertical,
gravity produces an angular acceleration equal to ()θθsin /g
l g = , and a cart acceleration of θx produces an angular acceleration of θθcos )/(x l x -
=. Writing these accelerations as an equation of motion, linearizing it, and taking its Laplace Transform, we produce the plant transfer function G(s), as follows:
)
1)(1(/)()()(cos )/(sin )/(222g -+-=--=Θ=-=--=+=s s g s g ls s s X s s G x
g l l x l g L L x
ττθθθθθθθ
where the time constant L τ is defined as g l /L =τ.This transfer function has a pole in the right half-plane, which is consistent with our expectation of an unstable system.
We start the feedback design by driving the cart with a motor with transfer function M(s) and driving the motor with a voltage proportional to the angle μ. Including the familiar motor transfer function
)1()()()(+==s s k s V s X s M M
M τ
Figure 2: Root-locus plot of pendulum and motor, L(s) = M(s)G(s)
with the plant G(s), we get a root locus with one pole that stays in the right half-plane. Using normalized numbers, we get the root locus plot as is seen in Figure 2.
In order to stabilize the system, we need to get rid of the remaining zero at the origin so that the locus from the plant pole on the positive real axis moves into the left half-plane. Thus our compensator must include a pole at the origin. However, we should balance the added compensator pole with an added zero, so that the number of poles less the number of zeros
remains equal to two, leaving the root-locus asymptotes at ±90° (otherwise, the asymptotes would be ±180° and±60° which eventually lead the poles into the right half plane). Thus we use a compensator
s
s s K K K ττ1)(+= and we assume that L
K M τττ<<. The block diagram of the system is shown in Figure 3,and the root locus plot becomes as in Figure 4 (note that since there is an inversion in G(s),we
外文出处: 《Exploiting Software How to Break Code》By Greg Hoglund, Gary McGraw Publisher : Addison Wesley Pub Date : February 17, 2004 ISBN : 0-201-78695-8 译文标题: JDBC接口技术 译文: JDBC是一种可用于执行SQL语句的JavaAPI(ApplicationProgrammingInterface应用程序设计接口)。它由一些Java语言编写的类和界面组成。JDBC为数据库应用开发人员、数据库前台工具开发人员提供了一种标准的应用程序设计接口,使开发人员可以用纯Java语言编写完整的数据库应用程序。 一、ODBC到JDBC的发展历程 说到JDBC,很容易让人联想到另一个十分熟悉的字眼“ODBC”。它们之间有没有联系呢?如果有,那么它们之间又是怎样的关系呢? ODBC是OpenDatabaseConnectivity的英文简写。它是一种用来在相关或不相关的数据库管理系统(DBMS)中存取数据的,用C语言实现的,标准应用程序数据接口。通过ODBCAPI,应用程序可以存取保存在多种不同数据库管理系统(DBMS)中的数据,而不论每个DBMS使用了何种数据存储格式和编程接口。 1.ODBC的结构模型 ODBC的结构包括四个主要部分:应用程序接口、驱动器管理器、数据库驱动器和数据源。应用程序接口:屏蔽不同的ODBC数据库驱动器之间函数调用的差别,为用户提供统一的SQL编程接口。 驱动器管理器:为应用程序装载数据库驱动器。 数据库驱动器:实现ODBC的函数调用,提供对特定数据源的SQL请求。如果需要,数据库驱动器将修改应用程序的请求,使得请求符合相关的DBMS所支持的文法。 数据源:由用户想要存取的数据以及与它相关的操作系统、DBMS和用于访问DBMS的网络平台组成。 虽然ODBC驱动器管理器的主要目的是加载数据库驱动器,以便ODBC函数调用,但是数据库驱动器本身也执行ODBC函数调用,并与数据库相互配合。因此当应用系统发出调用与数据源进行连接时,数据库驱动器能管理通信协议。当建立起与数据源的连接时,数据库驱动器便能处理应用系统向DBMS发出的请求,对分析或发自数据源的设计进行必要的翻译,并将结果返回给应用系统。 2.JDBC的诞生 自从Java语言于1995年5月正式公布以来,Java风靡全球。出现大量的用java语言编写的程序,其中也包括数据库应用程序。由于没有一个Java语言的API,编程人员不得不在Java程序中加入C语言的ODBC函数调用。这就使很多Java的优秀特性无法充分发挥,比如平台无关性、面向对象特性等。随着越来越多的编程人员对Java语言的日益喜爱,越来越多的公司在Java程序开发上投入的精力日益增加,对java语言接口的访问数据库的API 的要求越来越强烈。也由于ODBC的有其不足之处,比如它并不容易使用,没有面向对象的特性等等,SUN公司决定开发一Java语言为接口的数据库应用程序开发接口。在JDK1.x 版本中,JDBC只是一个可选部件,到了JDK1.1公布时,SQL类包(也就是JDBCAPI)
控制工程与仿真课程设计报告 报告题目直线一级倒立摆建模、分析及控制器的设计 组员1专业、班级14自动化1 班姓名朱永远学号1405031009 组员1专业、班级14自动化1 班姓名王宪孺学号1405031011组员1专业、班级14自动化1 班姓名孙金红学号1405031013 报告评分标准 评分项目权重评价内容评价结果项目得分 内容70设计方案较合 理、正确,内容 较完整 70-50分 设计方案基本合 理、正确,内容 基本完整 50-30分 设计方案基本不 合理、正确,内 容不完整 0-30分 语言组织15语言较流顺,标 点符号较正确 10-15分语言基本通顺, 标点符号基本正 确 5-10分 语言不通顺,有 错别字,标点符 号混乱 5分以下 格式15 报告格式较正 确,排版较规范 美观 10-15分 报告格式基本正 确,排版不规范 5-10分 报告格式不正 确,排版混乱 5分以下总分
直线一级倒立摆建模、分析及控制器的设计 一状态空间模型的建立 1.1直线一级倒立摆的数学模型 图1.1 直线一级倒立摆系统 本文中倒立摆系统描述中涉及的符号、物理意义及相关数值如表1.1所示。
图1.2是系统中小车的受力分析图。其中,N 和P 为小车与摆杆相互作用力的水平和垂直方向的分量。 图1.2 系统中小车的受力分析图 图1.3是系统中摆杆的受力分析图。F s 是摆杆受到的水平方向的干扰力, F h 是摆杆受到的垂直方向的干扰力,合力是垂直方向夹角为α的干扰力F g 。
图1.3 摆杆受力分析图 分析小车水平方向所受的合力,可以得到以下方程: ()11- 设摆杆受到与垂直方向夹角为α 的干扰力Fg ,可分解为水平方向、垂直方向的干扰力,所产生的力矩可以等效为在摆杆顶端的水平干扰力FS 、垂直干扰力Fh 产生的力矩。 ()21- 对摆杆水平方向的受力进行分析可以得到下面等式: ()θsin 22 l x dt d m F N S +=- ()31- 即: αθθθθsin sin cos 2f F ml ml x m N +-+= ()41- 对图1.3摆杆垂直方向上的合力进行分析,可以得到下面方程: ()θcos 22 l l dt d m F mg P h -=++- ()51- 即 θθθθ αcos sin cos 2 ml ml F mg P g +=++- ()61- 力矩平衡方程如下: 0cos sin sin cos cos sin =++++θθθθαθα I Nl Pl l F l F g g ()71- 代入P 和N ,得到方程: () 0cos 2sin sin 2cos sin cos 2cos sin 2222=+-++++θθθθθθθαθαx ml ml mgl ml I l F l F g g ()81- 设φπθ+=,(φ是摆杆杆与垂直向上方向之间的夹角,单位是弧度),代入上式。假设φ<<1,则可进行近似处理: φφφφφφφ===?? ? ??==2sin ,12cos ,0,sin ,1cos 2 dt d N x f F x M --= α sin g S F F =α cos g h F F =
毕业设计(论文)外文文献翻译 文献、资料中文题目:软件开发概念和设计方法文献、资料英文题目: 文献、资料来源: 文献、资料发表(出版)日期: 院(部): 专业: 班级: 姓名: 学号: 指导教师: 翻译日期: 2017.02.14
外文资料原文 Software Development Concepts and Design Methodologies During the 1960s, ma inframes and higher level programming languages were applied to man y problems including human resource s yste ms,reservation s yste ms, and manufacturing s yste ms. Computers and software were seen as the cure all for man y bu siness issues were some times applied blindly. S yste ms sometimes failed to solve the problem for which the y were designed for man y reasons including: ?Inability to sufficiently understand complex problems ?Not sufficiently taking into account end-u ser needs, the organizational environ ment, and performance tradeoffs ?Inability to accurately estimate development time and operational costs ?Lack of framework for consistent and regular customer communications At this time, the concept of structured programming, top-down design, stepwise refinement,and modularity e merged. Structured programming is still the most dominant approach to software engineering and is still evo lving. These failures led to the concept of "software engineering" based upon the idea that an engineering-like discipl ine could be applied to software design and develop ment. Software design is a process where the software designer applies techniques and principles to produce a conceptual model that de scribes and defines a solution to a problem. In the beginning, this des ign process has not been well structured and the model does not alwa ys accurately represent the problem of software development. However,design methodologies have been evolving to accommo date changes in technolog y coupled with our increased understanding of development processes. Whereas early desig n methods addressed specific aspects of the
外文翻译 专业机械设计制造及其自动化学生姓名刘链柱 班级机制111 学号1110101102 指导教师葛友华
外文资料名称: Design and performance evaluation of vacuum cleaners using cyclone technology 外文资料出处:Korean J. Chem. Eng., 23(6), (用外文写) 925-930 (2006) 附件: 1.外文资料翻译译文 2.外文原文
应用旋风技术真空吸尘器的设计和性能介绍 吉尔泰金,洪城铱昌,宰瑾李, 刘链柱译 摘要:旋风型分离器技术用于真空吸尘器 - 轴向进流旋风和切向进气道流旋风有效地收集粉尘和降低压力降已被实验研究。优化设计等因素作为集尘效率,压降,并切成尺寸被粒度对应于分级收集的50%的效率进行了研究。颗粒切成大小降低入口面积,体直径,减小涡取景器直径的旋风。切向入口的双流量气旋具有良好的性能考虑的350毫米汞柱的低压降和为1.5μm的质量中位直径在1米3的流量的截止尺寸。一使用切向入口的双流量旋风吸尘器示出了势是一种有效的方法,用于收集在家庭中产生的粉尘。 摘要及关键词:吸尘器; 粉尘; 旋风分离器 引言 我们这个时代的很大一部分都花在了房子,工作场所,或其他建筑,因此,室内空间应该是既舒适情绪和卫生。但室内空气中含有超过室外空气因气密性的二次污染物,毒物,食品气味。这是通过使用产生在建筑中的新材料和设备。真空吸尘器为代表的家电去除有害物质从地板到地毯所用的商用真空吸尘器房子由纸过滤,预过滤器和排气过滤器通过洁净的空气排放到大气中。虽然真空吸尘器是方便在使用中,吸入压力下降说唱空转成比例地清洗的时间,以及纸过滤器也应定期更换,由于压力下降,气味和细菌通过纸过滤器内的残留粉尘。 图1示出了大气气溶胶的粒度分布通常是双峰形,在粗颗粒(>2.0微米)模式为主要的外部来源,如风吹尘,海盐喷雾,火山,从工厂直接排放和车辆废气排放,以及那些在细颗粒模式包括燃烧或光化学反应。表1显示模式,典型的大气航空的直径和质量浓度溶胶被许多研究者测量。精细模式在0.18?0.36 在5.7到25微米尺寸范围微米尺寸范围。质量浓度为2?205微克,可直接在大气气溶胶和 3.85至36.3μg/m3柴油气溶胶。
一级倒立摆控制方法比较 摘要:倒立摆系统是一个典型的多变量、非线性、强耦合和快速运动的自然不稳定系统。针对一级倒立摆系统,首先利用牛顿力学的知识建立了数学模型,然后利用Simulink 及其封装功能建立倒立摆的仿真模型,使模型更具灵活性,给仿真带来很大方便。根据状态方程判断系统的能控、能观性。通过LQR控制算法和极点配置设计控制器使系统达到稳定状态,分析两种方法的优缺点,并利用Matlab仿真加以证实。 关键词:倒立摆; LQR ;极点配置 ;Matlab DISCUSSION ON CONTROLOF INVERTED PENDULUM Abstract:the inverted pendulum system is a typical multi-variable, nonlinear, strong coupling and rapid movement of the natural unstable system. According to the level of inverted pendulum system, firstI make use of Newtonian mechanics knowledge to establishthe mathematical model, and use the Simulink and packaging function to establish inverted pendulum simulation model.The model is more flexibility, bringing a lot of convenience for simulation. By the equation of state, controllability and observablityof system can be sure. Designing the LQR control algorithm and pole-place makes the system stable state, analyzes the advantages and disadvantages of two methods confirmed through the simulation of MATLAB. Key words:Inverted pendulum ;LQR ;pole-place ;Matlab 0引言 倒立摆系统作为研究控制理论的一种典型的实验装置,具有成本低廉,结构简单,物理参数和结构易于调整的优点。研究倒立摆系统具有很强的理论意义,同时也具有深远的实践意义。许多抽象的控制概念如稳定性、能控性和能观性,都可以通过倒立摆系统直观地表现出来。希望对倒立摆的研究能够加深对控制理论的了解,为后面学习奠定坚实的基础。 倒立摆[1]的稳定控制主要可分为线性控制和智能控制两大类,下面分别对其归纳介绍。 1)线性理论控制方法 应用线性控制方法的基本前提是倒立摆处在平衡点附近,偏移很小时,系统可以用
I / 11 本科毕业设计外文翻译 <2018届) 论文题目基于WEB 的J2EE 的信息系统的方法研究 作者姓名[单击此处输入姓名] 指导教师[单击此处输入姓名] 学科(专业 > 所在学院计算机科学与技术学院 提交日期[时间 ]
基于WEB的J2EE的信息系统的方法研究 摘要:本文介绍基于工程的Java开发框架背后的概念,并介绍它如何用于IT 工程开发。因为有许多相同设计和开发工作在不同的方式下重复,而且并不总是符合最佳实践,所以许多开发框架建立了。我们已经定义了共同关注的问题和应用模式,代表有效解决办法的工具。开发框架提供:<1)从用户界面到数据集成的应用程序开发堆栈;<2)一个架构,基本环境及他们的相关技术,这些技术用来使用其他一些框架。架构定义了一个开发方法,其目的是协助客户开发工程。 关键词:J2EE 框架WEB开发 一、引言 软件工具包用来进行复杂的空间动态系统的非线性分析越来越多地使用基于Web的网络平台,以实现他们的用户界面,科学分析,分布仿真结果和科学家之间的信息交流。对于许多应用系统基于Web访问的非线性分析模拟软件成为一个重要组成部分。网络硬件和软件方面的密集技术变革[1]提供了比过去更多的自由选择机会[2]。因此,WEB平台的合理选择和发展对整个地区的非线性分析及其众多的应用程序具有越来越重要的意义。现阶段的WEB发展的特点是出现了大量的开源框架。框架将Web开发提到一个更高的水平,使基本功能的重复使用成为可能和从而提高了开发的生产力。 在某些情况下,开源框架没有提供常见问题的一个解决方案。出于这个原因,开发在开源框架的基础上建立自己的工程发展框架。本文旨在描述是一个基于Java的框架,该框架利用了开源框架并有助于开发基于Web的应用。通过分析现有的开源框架,本文提出了新的架构,基本环境及他们用来提高和利用其他一些框架的相关技术。架构定义了自己开发方法,其目的是协助客户开发和事例工程。 应用程序设计应该关注在工程中的重复利用。即使有独特的功能要求,也
毕业设计(论文) 外文翻译 题目西安市水源工程中的 水电站设计 专业水利水电工程 班级 学生 指导教师 2016年
研究钢弧形闸门的动态稳定性 牛志国 河海大学水利水电工程学院,中国南京,邮编210098 nzg_197901@https://www.doczj.com/doc/d417633825.html,,niuzhiguo@https://www.doczj.com/doc/d417633825.html, 李同春 河海大学水利水电工程学院,中国南京,邮编210098 ltchhu@https://www.doczj.com/doc/d417633825.html, 摘要 由于钢弧形闸门的结构特征和弹力,调查对参数共振的弧形闸门的臂一直是研究领域的热点话题弧形弧形闸门的动力稳定性。在这个论文中,简化空间框架作为分析模型,根据弹性体薄壁结构的扰动方程和梁单元模型和薄壁结构的梁单元模型,动态不稳定区域的弧形闸门可以通过有限元的方法,应用有限元的方法计算动态不稳定性的主要区域的弧形弧形闸门工作。此外,结合物理和数值模型,对识别新方法的参数共振钢弧形闸门提出了调查,本文不仅是重要的改进弧形闸门的参数振动的计算方法,但也为进一步研究弧形弧形闸门结构的动态稳定性打下了坚实的基础。 简介 低举升力,没有门槽,好流型,和操作方便等优点,使钢弧形闸门已经广泛应用于水工建筑物。弧形闸门的结构特点是液压完全作用于弧形闸门,通过门叶和主大梁,所以弧形闸门臂是主要的组件确保弧形闸门安全操作。如果周期性轴向载荷作用于手臂,手臂的不稳定是在一定条件下可能发生。调查指出:在弧形闸门的20次事故中,除了极特殊的破坏情况下,弧形闸门的破坏的原因是弧形闸门臂的不稳定;此外,明显的动态作用下发生破坏。例如:张山闸,位于中国的江苏省,包括36个弧形闸门。当一个弧形闸门打开放水时,门被破坏了,而其他弧形闸门则关闭,受到静态静水压力仍然是一样的,很明显,一个动态的加载是造成的弧形闸门破坏一个主要因素。因此弧形闸门臂的动态不稳定是造成弧形闸门(特别是低水头的弧形闸门)破坏的主要原是毫无疑问。
研究生《现代控制理论及其应用》课程小论文 一级倒立摆的建模与控制分析 学院:机械工程学院 班级:机研131 姓名:尹润丰 学号: 201321202016 2014年6月2日
目录 1. 问题描述及状态空间表达式建立..............................................................- 1 - 1.1问题描述.......................................................................................................................................- 1 - 1.2状态空间表达式的建立...............................................................................................................- 1 - 1.2.1直线一级倒立摆的数学模型 ..........................................................................................- 1 - 1.2.2 直线一级倒立摆系统的状态方程 .................................................................................- 5 - 2.应用MATLAB分析系统性能 .....................................................................- 6 - 2.1直线一级倒立摆闭环系统稳定性分析 ......................................................................................- 6 - 2.2 系统可控性分析.........................................................................................................................- 7 - 2.3 系统可观测性分析.....................................................................................................................- 8 - 3. 应用matlab进行综合设计.........................................................................- 8 - 3.1状态反馈原理...............................................................................................................................- 8 - 3.2全维状态反馈观测器和simulink仿真 .......................................................................................- 9 - 4.应用Matlab进行系统最优控制设计 ........................................................ - 11 - 5.总结 ............................................................................................................. - 13 -
单级倒立摆系统的分析与设计 小组成员:武锦张东瀛杨姣 李邦志胡友辉 一.倒立摆系统简介 倒立摆系统是一个典型的高阶次、多变量、不稳定和强耦合的非线性系统。由于它的行为与火箭飞行以及两足机器人行走有很大的相似性,因而对其研究具有重大的理论和实践意义。由于倒立摆系统本身所具有的上述特点,使它成为人们深入学习、研究和证实各种控制理论有效性的实验系统。 单级倒立摆系统(Simple Inverted Pendulum System)是一种广泛应用的物理模型,其结构和飞机着陆、火箭飞行及机器人的关节运动等有很多相似之处,因而对倒立摆系统平衡的控制方法在航空及机器人等领域有着广泛的用途,倒立摆控制理论产生的方法和技术将在半导体及精密仪器加工、机器入技术、导弹拦截控制系统、航空器对接控制技术等方面具有广阔的开发利用前景。 倒立摆仿真或实物控制实验是控制领域中用来检验某种控制理论或方法的典型方案。最初研究开始于二十世纪50年代,单级倒立摆可以看作是一个火箭模型,相比之下二阶倒立摆就复杂得多。1972年,Sturgen等采用线性模拟电路实现了对二级倒立摆的控制。目前,一级倒立摆控制的仿真或实物系统已广泛用于教学。 二.系统建模 1.单级倒立摆系统的物理模型 图1:单级倒立摆系统的物理模型
单级倒立摆系统是如下的物理模型:在惯性参考系下的光滑水平平面上,放置一个可以在平行于纸面方向左右自由移动的小车(cart ),一根刚性的摆杆(pendulum leg )通过其末端的一个不计摩擦的固定连接点(flex Joint )与小车相连构成一个倒立摆。倒立摆和小车共同构成了单级倒立摆系统。倒立摆可以在平行于纸面180°的范围内自由摆动。倒立摆控制系统的目的是使倒立摆在外力的摄动下摆杆仍然保持竖直向上状态。在小车静止的状态下,由于受到重力的作用,倒立摆的稳定性在摆杆受到微小的摄动时就会发生不可逆转的破坏而使倒立摆无法复位,这时必须使小车在平行于纸面的方向通过位移产生相应的加速度。依照惯性参考系下的牛顿力学原理,作用力与物体位移对时间的二阶导数存在线性关系,单级倒立摆系统是一个非线性系统。 各个参数的物理意义为: M — 小车的质量 m — 倒立摆的质量 F — 作用到小车上的水平驱动力 L — 倒立摆的长度 x — 小车的位置 θ— 某一时刻摆角 整个倒立摆系统就受到重力、驱动力和摩擦阻力的三个外力的共同作用。这里,驱动力F 是由连接小车的传动装置提供,控制倒立摆的稳定实际上就是依靠控制驱动力F 使小车在水平面上做与倒立摆运动相关的特定运动。为了简化模型以利于仿真,假设小车与导轨以及摆杆与小车铰链之间的摩擦均为0。 2.单级倒立摆系统的数学模型 令小车的水平位移为x ,运动速度为v ,加速度a 。 小车的动能为212kc E Mx =,选择特定的参考平面使得小车的势能为0。 摆杆的长度为L ,某时刻摆角为θ,在摆杆上与固定连接点距离为q (0 一级倒立摆的系统分析 一、倒立摆系统的模型建立 如图1-1所示为一级倒立摆的物理模型 图1-1 一级倒立摆物理模型 对于上图的物理模型我们做以下假设: M:小车质量 m:摆杆质量 b:小车摩擦系数 l:摆杆转动轴心到杆质心的长度 I:摆杆惯量 F:加在小车上的力 x:小车位置 ?:摆杆与垂直向上方向的夹角 θ:摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)图1-2是系统中小车和摆杆的受力分析图。其中,N和P为小车与摆 杆相互作用力的水平和垂直方向的分量。注意:实际倒立摆系统中的检测和执行装置的正负方向已经完全确定,因而矢量方向定义如图所示,图示方向为矢量正方向。 图1-2 小车及摆杆受力分析 分析小车水平方向受力,可以得到以下方程: M x?=F-bx?-N (1-1) 由摆杆水平方向的受力进行分析可以得到以下方程: N =m d 2dt (x +l sin θ) (1-2) 即: N =mx?+mlθcos θ?mlθ2sin θ (1-3) 将这个等式代入式(1-1)中,可以得到系统的第一个运动方程: (M +m )x?+bx?+mlθcos θ?mlθ2sin θ=F (1-4) 为推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得出以下方程: P ?mg =m d 2dt 2 (l cos θ) (1-5) P ?mg =? mlθsin θ?mlθ2cos θ (1-6) 利用力矩平衡方程可以有: ?Pl sinθ?Nl cosθ=Iθ (1-7) 注意:此方程中的力矩方向,由于θ=π+?,cos?=?cosθ,sin?=?sinθ,所以等式前面含有负号。 合并两个方程,约去P和N可以得到第二个运动方程: (I+ml2)θ+mgl sinθ=?mlx?cosθ (1-8) 设θ=π+?,假设?与1(单位是弧度)相比很小,即?<<1,则 可以进行近似处理:cosθ=?1,sinθ=??,(dθ dt ) 2 =0。用u来 代表被控对象的输入力F,线性化后的两个运动方程如下: {(I+ml2)??mgl?=mlx? (M+m)x?+bx??ml?=u (1-9) 假设初始条件为0,则对式(1-9)进行拉普拉斯变换,可以得到: {(I+ml2)Φ(s)s2?mglΦ(s)=mlX(s)s2 (M+m)X(s)s2+bX(s)s?mlΦ(s)s2=U(s) (1-10) 由于输出为角度?,求解方程组的第一个方程,可以得到: X(s)=[(I+ml2) ml ?g s ]Φ(s) (1-11) 或改写为:Φ(s) X(s)=mls2 (I+ml2)s2?mgl (1-12) 如果令v=x?,则有:Φ(s) V(s)=ml (I+ml2)s2?mgl (1-13) 如果将上式代入方程组的第二个方程,可以得到: (M+m)[(I+ml2) ml ?g s ]Φ(s)s2+b[(I+ml2) ml +g s ]Φ(s)s?mlΦ(s)s2= U(s) (1-14) 整理后可得传递函数: Φ(s) U(s)= ml q s2 s4+b(I+ml 2) q s3?(M+m)mgl q s2?bmgl q s (1-15) Section 3 Design philosophy, design method and earth pressures 3.1 Design philosophy 3.1.1 General The design of earth retaining structures requires consideration of the interaction between the ground and the structure. It requires the performance of two sets of calculations: 1)a set of equilibrium calculations to determine the overall proportions and the geometry of the structure necessary to achieve equilibrium under the relevant earth pressures and forces; 2)structural design calculations to determine the size and properties of thestructural sections necessary to resist the bending moments and shear forces determined from the equilibrium calculations. Both sets of calculations are carried out for specific design situations (see 3.2.2) in accordance with the principles of limit state design. The selected design situations should be sufficiently Severe and varied so as to encompass all reasonable conditions which can be foreseen during the period of construction and the life of the retaining wall. 3.1.2 Limit state design This code of practice adopts the philosophy of limit state design. This philosophy does not impose upon the designer any special requirements as to the manner in which the safety and stability of the retaining wall may be achieved, whether by overall factors of safety, or partial factors of safety, or by other measures. Limit states (see 1.3.13) are classified into: a) ultimate limit states (see 3.1.3); b) serviceability limit states (see 3.1.4). Typical ultimate limit states are depicted in figure 3. Rupture states which are reached before collapse occurs are, for simplicity, also classified and 毕业设计(论文) 外文文献翻译 题目:A new constructing auxiliary function method for global optimization 学院: 专业名称: 学号: 学生姓名: 指导教师: 2014年2月14日 一个新的辅助函数的构造方法的全局优化 Jiang-She Zhang,Yong-Jun Wang https://www.doczj.com/doc/d417633825.html,/10.1016/j.mcm.2007.08.007 非线性函数优化问题中具有许多局部极小,在他们的搜索空间中的应用,如工程设计,分子生物学是广泛的,和神经网络训练.虽然现有的传统的方法,如最速下降方法,牛顿法,拟牛顿方法,信赖域方法,共轭梯度法,收敛迅速,可以找到解决方案,为高精度的连续可微函数,这在很大程度上依赖于初始点和最终的全局解的质量很难保证.在全局优化中存在的困难阻碍了许多学科的进一步发展.因此,全局优化通常成为一个具有挑战性的计算任务的研究. 一般来说,设计一个全局优化算法是由两个原因造成的困难:一是如何确定所得到的最小是全球性的(当时全球最小的是事先不知道),和其他的是,如何从中获得一个更好的最小跳.对第一个问题,一个停止规则称为贝叶斯终止条件已被报道.许多最近提出的算法的目标是在处理第二个问题.一般来说,这些方法可以被类?主要分两大类,即:(一)确定的方法,及(ii)的随机方法.随机的方法是基于生物或统计物理学,它跳到当地的最低使用基于概率的方法.这些方法包括遗传算法(GA),模拟退火法(SA)和粒子群优化算法(PSO).虽然这些方法有其用途,它们往往收敛速度慢和寻找更高精度的解决方案是耗费时间.他们更容易实现和解决组合优化问题.然而,确定性方法如填充函数法,盾构法,等,收敛迅速,具有较高的精度,通常可以找到一个解决方案.这些方法往往依赖于修改目标函数的函数“少”或“低”局部极小,比原来的目标函数,并设计算法来减少该?ED功能逃离局部极小更好的发现. 引用确定性算法中,扩散方程法,有效能量的方法,和积分变换方法近似的原始目标函数的粗结构由一组平滑函数的极小的“少”.这些方法通过修改目标函数的原始目标函数的积分.这样的集成是实现太贵,和辅助功能的最终解决必须追溯到 一阶直线倒立摆系统 姓名: 班级: 学号: 目录 摘要 (3) 第一部分单阶倒立摆系统建模 (4) (一)对象模型 (4) (二)电动机、驱动器及机械传动装置的模型 (6) 第二部分单阶倒立摆系统分析 (7) 第三部分单阶倒立摆系统控制 (11) (一)内环控制器的设计 (11) (二)外环控制器的设计 (14) 第四部分单阶倒立摆系统仿真结果 (16) 系统的simulink仿真 (16) 摘要: 该问题源自对于娱乐型”独轮自行车机器人”的控制,实验中对该系统进行系统仿真,通过对该实物模型的理论分析与实物仿真实验研究,有助于实现对独轮自行车机器人的有效控制。 控制理论中把此问题归结为“一阶直线倒立摆控制问题”。另外,诸如机器人行走过程中的平衡控制、火箭发射中的垂直度控制、卫星飞行中的姿态控制、海上钻井平台的稳定控制、飞机安全着陆控制等均涉及到倒立摆的控制问题。 实验中通过检测小车位置与摆杆的摆动角,来适当控制驱动电动机拖动力的大小,控制器由一台工业控制计算机(IPC)完成。实验将借助于“Simulink封装技术——子系统”,在模型验证的基础上,采用双闭环PID控制方案,实现倒立摆位置伺服控制的数字仿真实验。实验过程涉及对系统的建模、对系统的分析以及对系统的控制等步骤,最终得出实验结果。仿真实验结果不仅证明了PID方案对系统平衡控制的有效性,同时也展示了它们的控制品质和特性。 第一部分单阶倒立摆系统建模 (一) 对象模型 由于此问题为”单一刚性铰链、两自由度动力学问题”,因此,依据经典力学的牛顿定律即可满足要求。 如图1.1所示,设小车的质量为0m ,倒立摆均匀杆的质量为m ,摆长为2l ,摆的偏角为θ,小车的位移为x ,作用在小车上的水平方向上的力为F ,1O 为摆杆的质心。 图1.1 一阶倒立摆的物理模型 根据刚体绕定轴转动的动力学微分方程,转动惯量与角加速度乘积等于作用于刚体主动力对该轴力矩的代数和,则 1)摆杆绕其重心的转动方程为 sin cos y x l F J F l θθθ=-&& (1-1) 2)摆杆重心的水平运动可描述为 2 2(sin )x d F m x l dt θ=+ (1-2) 3)摆杆重心在垂直方向上的运动可描述为 2 2(cos )y d F mg m l dt θ-= (1-3) 4)小车水平方向运动可描述为 202x d x F F m dt -= (1-4) 单级倒立摆控制系统设计及simulink仿真 摘要:倒立摆系统是一个典型的多变量、非线性、强藕合和快速运动的自然不稳定系统。因此倒立摆在研究双足机器人直立行走、火箭发射过程的姿态调整和直升机飞行控制领域中有重要的现实意义,相关的科研成果己经应用到航天科技和机器人学等诸多领域。单级倒立摆系统是一种广泛应用的物理模型。控制单级倒立摆载体的运动是保证倒立摆稳定性的关键因素。为了避免常用的物理反馈分析方法和运动轨迹摄像制导控制方法的某些缺点,本文从力学的角度提出对倒立摆的运动进行纯角度制导分析,完成了对倒立摆载体的角度制导运动微分方程的数学建模,设计了该模型的模糊控制系统,并利用Matlab\simulink软件工具对倒立摆的运动进行了计算机仿真。实验表明,这种模糊控制配合代数解析方法的运算速度和计算机仿真的效果均较物理反馈制导控制方法有了一定的提高。该方法可以有效地改善单级倒立摆控制系统的性能。本论文的主要工作是研究了直线一级倒立摆系统的模糊控制问题,用Matlab和Simulink对一级倒立摆模糊控制系统进行了仿真,验证了设计的可行性。本文论述了一级倒立摆数学建模方法,推导出他们的微分方程,以及线性化后的状态方程。讨论了单级倒立摆系统的模糊控制方法和操作步骤。用Simulink实现了单级倒立摆模糊控制仿真系统,分别给出一级倒立摆系统控制量的响应曲线。通过仿真说明控制器的有效性和实现性。关键词:单级倒立摆;仿真;模糊控制;运动;建模;Simulink Design of single stage inverted pendulum control system and Simulink simulation Abstract: inverted pendulum system is unstable system with a typical multi variable, nonlinear, strong coupled and fast motion. So the research on the attitude adjustment of the double foot robot and the attitude adjustment of the rocket launching process and the helicopter flight control field have practical,significance. The related scientific research achievements have been applied to many fields such as aerospace science and robotics. Single inverted pendulum system is a widely used physical model. Controlling the movement of the single inverted pendulum is the key factor to guarantee the stability of the inverted pendulum. In order to avoid some shortings of mon physical feedback analysis method and motion trajectory camera guidance control method, this paper presents a pure angle guidance analysis on the motion of the inverted pendulum, and designs the(完整版)一级倒立摆系统分析
本科毕业设计外文翻译
毕业设计外文翻译
一阶倒立摆控制系统
单级倒立摆控制系统设计及MATLAB中仿真
相关主题
文本预览