1.1 概述
激光跟踪测量系统(Laser Tracker System)是工业测量系统中一种高精度的大尺寸测量仪器。它集合了激光干涉测距技术、光电探测技术、精密机械技术、计算机及控制技术、现代数值计算理论等各种先进技术,对空间运动目标进行跟踪并实时测量目标的空间三维坐标。它具有高精度、高效率、实时跟踪测量、安装快捷、操作简便等特点,适合于大尺寸工件配装测量。SMART310是Leica公司在1990年生产的第一台激光跟踪仪,1993年Leica公司又推出了SMART310的第二代产品,其后,Leica公司还推出了LT/LTD系列的激光跟踪仪,以满足不同的工业生产需要。LTD系列的激光跟踪仪采用了Leica公司专利的绝对测距仪,测量速度快,精度高,配套的软件则在Leica统一的工业测量系统平台Axyz下进行开发,包括经纬仪测量模块、全站仪测量模块、激光跟踪仪测量模
块和数字摄影测量模块等[8]。
激光跟踪系统在我国的应用始于1996年,上飞、沈飞集团在我国第一次引进了SMART310激光跟踪系统;2005年上海盾构公司引进了Leica公司的一套LTD600跟踪测量系统,应用于三维管模的检测。
1.2 激光跟踪测量系统的基本原理[52]
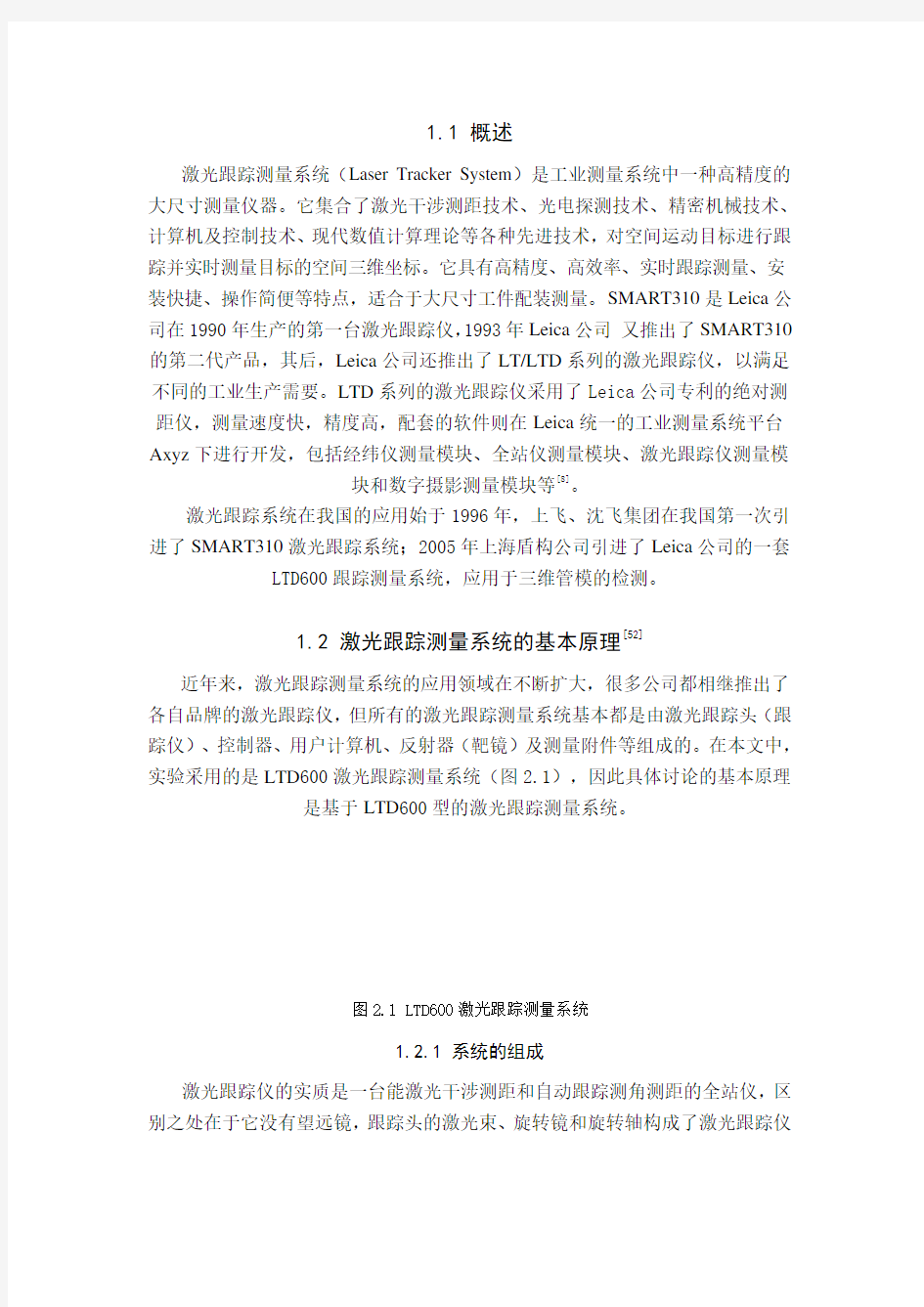
近年来,激光跟踪测量系统的应用领域在不断扩大,很多公司都相继推出了各自品牌的激光跟踪仪,但所有的激光跟踪测量系统基本都是由激光跟踪头(跟踪仪)、控制器、用户计算机、反射器(靶镜)及测量附件等组成的。在本文中,实验采用的是LTD600激光跟踪测量系统(图2.1),因此具体讨论的基本原理是基于LTD600型的激光跟踪测量系统。
图2.1 LTD600激光跟踪测量系统
1.2.1 系统的组成
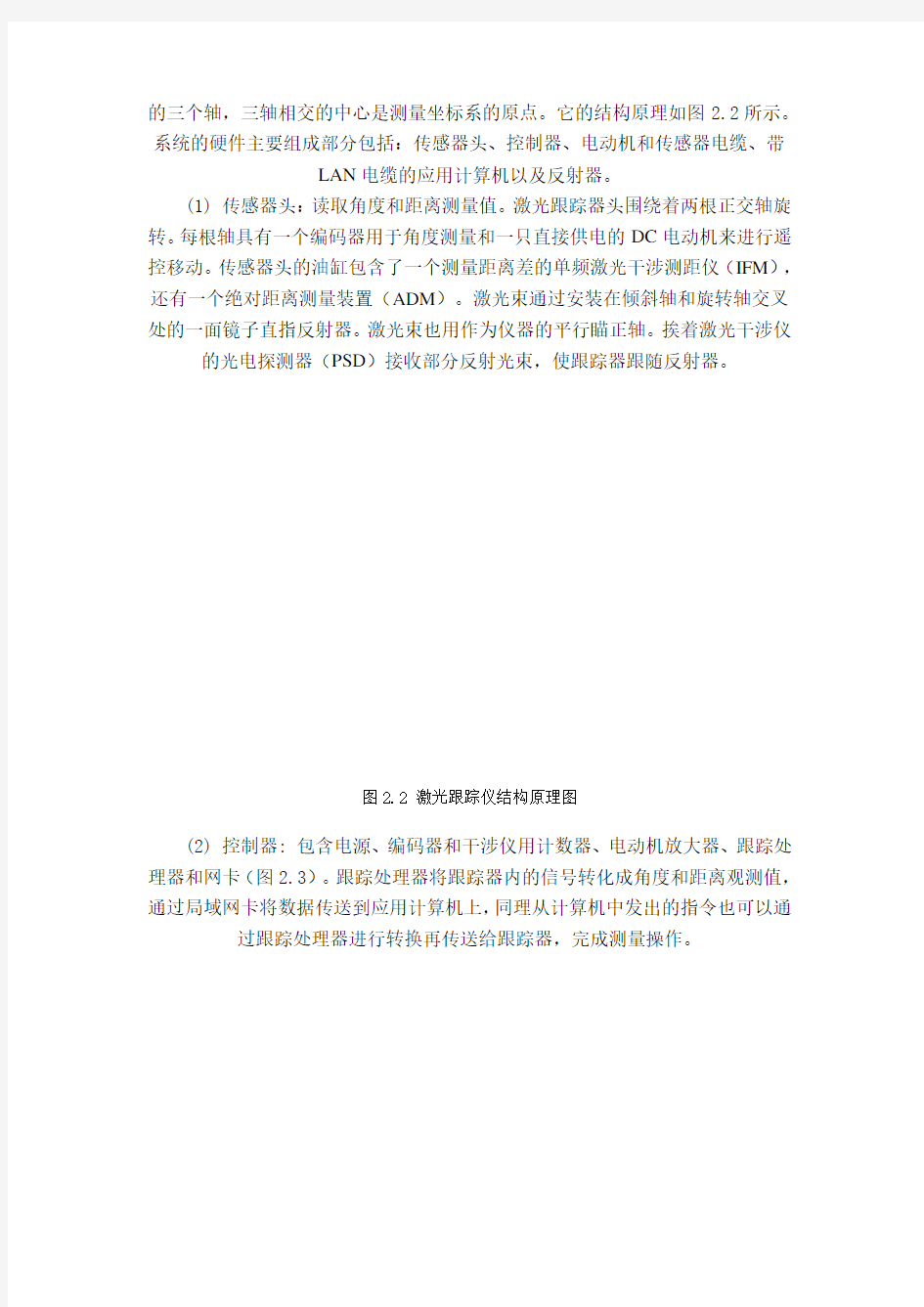
激光跟踪仪的实质是一台能激光干涉测距和自动跟踪测角测距的全站仪,区别之处在于它没有望远镜,跟踪头的激光束、旋转镜和旋转轴构成了激光跟踪仪
的三个轴,三轴相交的中心是测量坐标系的原点。它的结构原理如图2.2所示。系统的硬件主要组成部分包括:传感器头、控制器、电动机和传感器电缆、带
LAN电缆的应用计算机以及反射器。
(1) 传感器头:读取角度和距离测量值。激光跟踪器头围绕着两根正交轴旋转。每根轴具有一个编码器用于角度测量和一只直接供电的DC电动机来进行遥控移动。传感器头的油缸包含了一个测量距离差的单频激光干涉测距仪(IFM),还有一个绝对距离测量装置(ADM)。激光束通过安装在倾斜轴和旋转轴交叉处的一面镜子直指反射器。激光束也用作为仪器的平行瞄正轴。挨着激光干涉仪的光电探测器(PSD)接收部分反射光束,使跟踪器跟随反射器。
图2.2 激光跟踪仪结构原理图
(2) 控制器: 包含电源、编码器和干涉仪用计数器、电动机放大器、跟踪处理器和网卡(图2.3)。跟踪处理器将跟踪器内的信号转化成角度和距离观测值,通过局域网卡将数据传送到应用计算机上,同理从计算机中发出的指令也可以通过跟踪处理器进行转换再传送给跟踪器,完成测量操作。
图2.3 控制器
(3) 电缆:传感器电缆和电动机电缆分别用来完成传感器和电动机与控制器
之间的连接。LAN电缆则用于跟踪处理器和应用计算机之间的连接。
(4) 应用计算机:经过专业人员的配置后,加载了工业用的专业配套软件,
用来发出测量指令和接收测量数据。
(5) 反射器:采用球形结构,因此测量点到测量面的距离是固定的。本系统
中采用三面正交镜的三重镜反射器。
(6) 气象站:记录空气压力和温度。这些数据需要用来在计算激光反射时是
必需的,并通过串行接口被传送给联机的计算机应用程序,如图2.4。
图2.4 气象站
(7) 测量附件:包括三角支架、手推服务小车等。支架用来固定激光跟踪仪,调整高度,保证各种测量模式的稳定性,且三角支架底座带轮子,可方便地移动激光跟踪仪。手推服务小车则可装载控制器等设备,运送方便快捷。
1.2.2 系统的基本原理[7]
激光跟踪测量系统的工作基本原理是在目标点上安置一个反射器,跟踪头发出的激光射到反射器上,又返回到跟踪头,当目标移动时,跟踪头调整光束方向来对准目标。同时,返回光束为检测系统所接收,用来测算目标的空间位置。简
单的说,激光跟踪测量系统的所要解决的问题是静态或动态地跟踪一个在空间中
运动的点,同时确定目标点的空间坐标。
激光跟踪仪的坐标测量是基于极坐标测量原理的(图2.5)。测量点的坐标由跟踪头输出的两个角度,即水平角H和垂直角V,以及反射器到跟踪头的距离D计算出来的。本系统在实际应用中采用的一站法激光跟踪测量系统。
图2.5 一站法激光跟踪仪坐标测量原理
计算公式为:
(2.1)
系统的工作原理从以下几个部分进行讨论:
(1)角度测量部分:其工作原理类似于电子经纬仪、马达驱动式全站仪的角度测量装置,包括水平度盘、垂直度盘、步进马达及读数系统,由于具有跟
踪测量技术,它的动态性能较好。
(2)距离测量部分:由IFM装置和ADM装置分别进行相对距离测量和绝对距离测量。IFM是基于光学干涉法的原理,通过测量干涉条纹的变化来测
量距离的变化量,因此只能测量相对距离。而跟踪头中心到鸟池(图2.6)的距离是已知固定的,称为基准距离。ADM装置的功能就是自动重新初
始化IFM,获取基准距离。ADM通过测定反射光的光强最小来判断光所
经过路径的时间,来计算出绝对距离。当反射器从鸟池内开始移动,IFM
测量出移动的相对距离,再加上ADM测出的基准距离,就能计算出跟踪
头中心到空间点的绝对距离。
图2.6 鸟池
(3)激光跟踪控制部分:由光电探测器(PSD)来完成。反射器反射回的光经过分光镜,有一部分光直接进入光电探测器,当反射器移动时,这部分光将会在光电探测器上产生一个偏移值,光电探测器根据偏移值会自动控制马达转动直到偏移值为零,实现跟踪反射器的目的。
1.2.3 激光跟踪仪的测量精度和系统误差校准方法
激光跟踪仪的测量精度主要取决于测角和测距的精度以及测量环境的影响。以Leica公司的LTD600型激光跟踪仪为例,它的角度分辨率为0.14″,角度测量精度达2.0″;单频光外差干涉法测量距离的分辨率为,距离的测量精度达,其精度主要受到温度和气压测量精度和变化及大气条件均匀性的影响,同时,干涉法距离测量的精度还受到基准距离校准精度的影响,因为基准距离校准误差将会成为干涉测距的系统误差;ADM绝对测距仪采用光偏振的工作原理,它的距离测量分辨率达,在全量程范围内的距离测量精度为;跟踪仪最大量测距离为,水平方向的量测范围达,垂直方
向的量测范围为。
在测量范围内,IFM相对坐标测量精度达到 (即);ADM 绝对坐标测量精度达到 (即)。当然系统精度还取决于工作场地和环境的稳定性,一般要求在室内较稳定的工作条件下。
之前提过激光跟踪仪的三轴,理论上,三轴之间是要保持正交关系,但由于实际的机械加工,安装调整误差和电子零点误差等影响,轴系间不可能到达理想的正交状态,这也是系统误差存在的原因。
在李广云教授的论文[8]中指出,按物理意义激光跟踪仪角度测量的系统误差分为15类,即有15个校准参数,分别是:水平轴倾斜误差i、旋转镜倾斜误差c、激光束倾斜误差lx和ly、水平轴偏移误差e、旋转镜偏移误差f、激光束偏移误差Ox和Oy、平行玻璃板偏移误差O2x和O2y、垂直度盘指标差j、水平度盘偏心差Ex和Ey、垂直度盘偏心差Kx和Ky。这些系统误差的检验类似于经纬仪或全站仪的检验,并且在配套的系统软件中已经添置了专门的仪器校准程序,操作人员只要将测定的误差参数存于应用计算机中,在实际作业中这些参数会被
自动传送到跟踪仪控制器中,用来补偿修正各类测角测距观测值。为了简化操作过程,在激光跟踪仪出厂前厂家同时给出了一组校准后的参数供用户参考,但考虑到重新安装、环境变化、长途运输等因素的影响,用户也应自行检测。校准方法可参考经纬仪等的校准,具体的方法可参考仪器出厂的使用说明书。
不同于经纬仪或全站仪,跟踪仪中有个基准距离,即跟踪头中心到鸟池的距离,基准距离的测定误差称为基距误差C,它属于测距系统误差。基距误差的测定方法在文献[7]中提出,选取两个稳定点1、2,两点相距3~4m,确保两点基本与跟踪头处于同一高度,在A,B两点分别设站,分别观测1、2点的水平角、垂直角、距离三类共12个观测值,根据余弦定理可以计算出C值。
具体计算公式为:
(2.2)
两式并整理得:
(2.3)
式中,
(2.4)在实际计算基距误差中,根据图2.7所示,在A、B两站分别观测1、2两点,
按式(2.3)可以计算得出基距误差C。
图2.7 基准距离校准方法
实际上,C的值是基准距离的变化部分与反射器常数之和,所以对于不同类型的反射器,C的值也会发生变化,对于不同的反射器需要分别进行校准。
1.2.4 系统的应用
激光跟踪仪配备了高精度的水平和垂直角度编码器,实现精确的角度测量;专利的徕卡激光干涉仪实现精确的相对距离测量;高精度的绝对测距仪则实现快速检测。这些特点弥补了对大型构件的传统测量方法——经纬仪法的不足之处,
例如人工测量的效率相对较低、观测精度差等缺点。激光跟踪测量系统测量范围大、携带方便、对环境要求不高、适合现场作业等优点,使它的应用领域逐渐扩
大。
在重型机械制造业中,大尺寸部件的检测和逆向工程常采用激光跟踪测量系统。在零部件生产中,该系统可以快速精确地检验每个成品零部件的尺寸是否与设计尺寸完全一致,同时迅速地数字化零部件的物理模型,得到的数字化文件可以用各种方法处理从而得出测量结果。在机械领域中,逆向工程(Reverse Engineering)是在没有设计图纸或者设计图纸不完整以及没有CAD模型的情况下,按照现有零件的模型(称为零件原形),利用各种数字化技术及CAD技术重新构造原形CAD模型的过程。CMM是逆向工程中的接触式测量方法,由于激光跟踪测量系统的原理也是基于三维坐标测量的方法,所以这套系统也在逆向工程中应用。激光跟踪测量系统对工件模型进行扫描测量后建立数据模型,由数据模型生成可以被加工中心识别的加工程序,从而加工出模具[9]。
三维管片和模具测量系统就是激光跟踪测量系统的一个工程实践应用(图2.8),通过跟踪测量已经制成成品的管片各面上的空间点的坐标,经过坐标系转换纠正,将各面上的数据点拟合成平面或曲面,检验管片的尺寸与设计尺寸的偏差,以便判断成品的质量是否合格。比起传统的检测测量方法,此套系统测量速度快,能在短时间内采集大量空间数据点信息,同时可以直接处理数据,给出成果报表,工作效率高,也大大节省了人力物力,一般只需要一个计算机操控人员及一个手持反射器移动的作业人员。该套系统同样也适用于制造管片的模具的
测量检测。
图2.8 三维管片和模具测量系统
在汽车工业领域中,激光跟踪测量系统常用来在线检测车身、测量汽车外形、汽车工装检具的检测与调整。在文献[10]中举出了汽车外形测量的实例,通过激光跟踪仪采集汽车不同部位的点云数据,再进行拼接得到完整的汽车曲面点
云数据,利用三维造型软件得到汽车三维模型,在测量过程中,应调整好激光跟踪仪与汽车的相对位置,尽量减小角向测量长度,提高汽车点云数据精度。如果激光跟踪仪能配合轻便型三坐标测量机等精密测量设备连接测量,则能对汽车轮廓等大型零件表面不易测量的凹槽等部位进行测量,得到较高精度的汽车点云数
据,提高汽车车身曲面拟合的精度。
另外,汽车的生产线都需要以最高级别的自动化程度和准确性进行定期检测,以进行重复性和适产性的测试。激光跟踪测量系统这种移动坐标测量设备,适合工业现场使用,在检测工程中使汽车生产的停工期大幅缩短,在生产线上的工装、夹具和检具也能进行精密的现场检测。Leica的LTD800激光跟踪测量系统已经在莱比锡工厂的BMW新车试生产阶段运用于生产线工具装备的检测中
(图2.9)[55]。
图2.9 LTD800在莱比锡工厂的BMW新车试生产阶段的应用
在航天航空制造业领域,飞行器具有外形尺寸及重量大、外部结构特殊、部件之间相互位置关系要求严格等特点。飞行器的装配通常是在各部件分别安装后再进行总体装配,在部装的某些环节和总装的整个过程中都需要进行严格的检测。在飞行器装配过程中的测量误差可能会导致很严重的后果,因此必须要确保航天航空领域测量的精确性。激光跟踪测量系统的现场性和实时性以及它的高精度性都满足了飞机行架的定位安装,飞机外形尺寸的检测,零部件的检测,飞机
的维修等工程项目的需要。
测量一架大型飞机的内外形尺寸,首先要确定整架飞机的空间坐标,保证所要测量到的外形尺寸空间点都在一个坐标系中,要求布置足够的测站,这些测站就保证了飞机上、下、左、右、前、后等整个外形都在激光跟踪仪测量范围内。其次要保证飞机处于静止状态,测量过程中不能产生移动。激光跟踪仪在每一个测站测量某一个区域的飞机外形坐标点,将各个测站的飞机外形坐标连接起来就构成整架飞机的外形尺寸坐标,将这些点处理后就形成了飞机外形的数字模型。
激光跟踪测量系统扫描范围大,采集数据速度快,数据采集量大,精度高,大大提高了工作效率(图2.10)。
图2.10 飞机外形尺寸的测绘
在造船工业领域中,激光跟踪测量系统常用于轮船外形尺寸的检测,重要部件安装位置的检测,逆向工程等。激光跟踪测量系统的高精度,激光束射程远,在制造业、机械业、质量控制业领域对于大型部件、机械零件的测量检测能更有
效地实现。
图2.11 轮船外形尺寸的检测图2.12 轮船外形
在科研领域中,激光跟踪测量系统已在机器人的制造校准过程使用。机器人在工厂机械安装、马达驱动安装、夹具重组等整个生产周期过程中如果能维持它的精确度,那么它才是一个成功的工业机器人。机器人的设计尺寸与实际生产尺寸的偏差往往在8-15mm之间,主要是由于机械公差和部件安装时所产生的误差所引起的。在校准机器人的实际应用中,有两个相邻的工作测量组,一组负责装配机器人,一组则负责检测校准安装部件,激光跟踪测量系统则安置在这两个测量组之间。操作人员通过计算机控制定位,激光跟踪测量系统可以检测两个工作小组的测量工作。在一组操作人员利用激光跟踪仪检测机器人配件的同时,另一组工作人员则负责装配已经经过检测的工件,装配完后再利用激光跟踪仪进行校准。依此类推,大幅提高了机器人生产安装的工作效率,也节省人力物力(图
2.13)
美国API公司
激光跟踪仪作为一种高精度便携式的三坐标测量设备,在世界汽车制造业的用途不断扩增。美国API公司作为激光跟踪仪发明人,上海通用选用该公司的TrackerII(Plus)激光跟踪仪用于生产现场工装检测以及白车身和冲压件测量。以下的解决方案将有效改观传统的光线阻断问题﹕一个是晶鼢Z(ADM,Absolute Distance Measurement)技术,另一个是智能测头技术(Intelliprobe)。
传统的激光跟踪仪采用激光干涉的原理,来测量靶球到跟踪头的距离,要求激光头和靶球间的光线始终不能被阻断,这在测量汽车工装夹具时往往是很难保证。API的绝对测距(ADM)技术基于红外光脉冲反射拍频计数原理,允许跟踪过程中断光,甚至可直接将靶球放至目标位置,再令跟踪头指向靶球实施测量,其10m内测量精度可达0.02mm。
TrackerII (Plus) 所支持的智能测头技术
事实证明,ADM技术有助于在线检测汽车夹具重复定位精度的提高,通常将光学靶安装在活动的夹头上,待每次夹头到达工作位置后,软件驱动跟踪头便指向光学靶的理论位置,而实际上每次夹头所处位置都将偏离理论值,跟踪头将在理论位置周围以螺旋线轨迹运动搜索光学靶,锁定目标后再用ADM技术测出光学靶到跟踪头的距离,从而计算出此时夹头所处实际位置。
在软件的配合下,激光跟踪仪能在极短时间内(通常只需几秒锺),测到多个夹头的重复定位精度,精度远高出数码相机交汇照相测量技术水准。
API的TrackerII(Plus)还支持智能测头技术,可以用测杆尖端测量激光照射不到的工件背面以及较深的孔和槽。(API美国自动精密工程供稿)
霍梅尔的光学非接触在线检测技术
霍梅尔的轴类零件综合测量仪,是柔性检测能力强的光学扫描检测与电感测量的结合体。接触式测量系统采用多点多测头结构,既有电感传感器,又有大量程数字式增量传感器,在凸轮轴的每个轴颈和凸轮上各设置多个测量截面,同时测量凸轮轴的各轴颈的直径、圆度、圆柱度和跳动,以及凸轮的基圆半径、基圆跳动、凸轮顶点角度和凸轮升程曲线。
光学非接触测量系统运用光电扫描影像处理的测量原理,通过光电子线性电荷耦合传感器件(CCD)的射线对工件的轮廓进行自动扫描。为进行动态测量,在工件旋转时自动记录工件轮廓影像的全部数据。
测量周期可由程序控制,将许多个单个测量项目,合并到一次最佳的自动综合测量程序中运行,分辨率极高,整个工件可被迅速且精确地测量出来。
霍梅尔凸轮轴在线检测机的测量节拍,高达每件20秒
光学非接触测量系统的优势在于,可将接触式测量系统难以测量的项目,通过光学扫描进行测量,这包括凸轮轴的各个轴颈和凸轮的台阶端面的轴向位置、各个台阶圆角的圆弧轮廓和半径、倒角的形状和角度宽度、沟槽宽度、相位角度、小锥度等。
配合集成的接触式电感测头,还可同时测量端面跳动。一次装夹就可以测量复杂工件的几何形状,测量步骤全部自动控制,测量分辨率达0.1微米。
凸轮轴在线检测机还革新性地、将光学表面探伤(缺陷检测)技术融合到测量系统中。通过视觉图像识别系统(OPTI-SENS Technology),全自动扫描凸轮轴的各个轴颈和各个凸轮的
表面缺陷。(德国霍梅尔公司供稿)
[56]。
FARO Laser Tracker 提高生产率的设计 https://www.doczj.com/doc/d412133391.html,/LaserTracker/cn
FARO激光跟踪仪简介 FARO激光跟踪仪是一款高精度的便携式坐标测量设备,能够让您通过快速、简单和精确地测量来实现制造产品、优化流程和提供解决方案的目的。 应对测量挑战 全世界的客户都信赖FARO激光跟踪仪,并利用它来应 对日常的测量挑战以及过去无法解决的复杂难题。 重新定义效率 FARO激光跟踪仪在设备校准、设备安装、部件检测、 工装建造与设置、制造与装配集成和逆向工程等应用 领域都缔造了突破性的效率。 增加产量 通过提高工作速度、缩短停工时间、消除昂贵的废料 以及获得精确、一致和值得报告的测量数据,许多公 司节省了数百万美元的费用。 提供优质产品 利用FARO激光跟踪仪,您可以制造出更具竞争力 的产品,加快实施产品改进计划并为当今的技术市 场提供高性能的产品。
实际应用 FARO激光跟踪仪在各种行业的许多应用中均可实现精确的测量,它提供了更佳的测量方法并使全新的制造方法成为可能。
校准 ? 比传统方法更准确、更省时 ? 重复性测量,合理的趋于失真 ? 通过实时测量来确定公差和验证设计 逆向工程 ? 获取高精度的数字化扫描数据 ? 不再需要硬件母版 工装建造 ? 全程精确测试(确保部件达到最高的装配标准) ? 验证工装的尺寸完整性和可重复性(确定或预先防范工装缺陷)零件检测 ? 将复杂的几何结构、曲面和特征位置与标称数据进行比较? 不需要移动工件到固定的检测工具中 ? 减少生产废料和不合格产品带来的损失 设备安装 ? 安放/调平床身 ? 防止机床在磨合期运行时造成的损坏 ? 降低设备上的零件磨损和撕裂 制造与装配集成 ? 实时获取关键的定位反馈 ? 设置移动部件的标称坐标 ? 在移动过程中动态地持续测量,以提供定位点的数据
概述 1.1 激光跟踪测量系统(Laser Tracker System)是工业测量系统中一种高精度的大尺寸测量仪器。它集合了激光干涉测距技术、光电探测技术、精密机械技术、计算机及控制技术、现代数值计算理论等各种先进技术,对空间运动目标进行跟踪并实时测量目标的空间三维坐标。它具有高精度、高效率、实时跟踪测量、安装快捷、操作简便等特点,适合于大尺寸工件配装测量。SMART310 是Leica 公司在1990年生产的第一台激光跟踪仪,1993年Leica公司又推出了SMART310 的第二代产品,其后,Leica 公司还推出了LT/LTD 系列的激光跟踪仪,以满足不同的工业生产需要。LTD 系列的激光跟踪仪采用了Leica 公司专利的绝对测距仪,测量速度快,精度高,配套的软件则在Leica统一的工业测量系统平台Axyz 下进行开发,包括经纬仪测量模块、全站仪测量模块、激光跟踪仪测量模[8] 。块 和数字摄影测量模块等 激光跟踪系统在我国的应用始于1996 年,上飞、沈飞集团在我国第一次引进了SMART310 激光跟踪系统;2005年上海盾构公司引进了Leica 公司的一套LTD600跟踪测量系统,应用于三维管模的检测。 [52] 激光跟踪测量系统的基本原理 1.2 近年来,激光跟踪测量系统的应用领域在不断扩大,很多公司都相继推出了各自品牌的激光跟踪仪,但所有的激光跟踪测量系统基本都是由激光跟踪头(跟踪仪)、控制器、用户计算机、反射器(靶镜)及测量附件等组成的。在本文中,实验采用的是LTD600激光跟踪测量系统(图2.1 ),因此具体讨论的基本原理是基于LTD600 型的激光跟踪测量系统。 图 2.1 LTD600 激光跟踪测量系统系统的组成1.2.1 激光跟踪仪的实质是一台能激光干涉测距和自动跟踪测角测距的全站仪,区别之处在于它没有望远镜,跟踪头的激光束、旋转镜和旋转轴构成了激光跟踪仪的三个轴,三轴相交的中心是测量坐标系的原点。它的结构原理如图2.2 所示系统的硬件主要组成部分包括:传感器头、控制器、电动机和传感器电缆、带LAN 电缆的应用计算机以及反射器。 (1)传感器头:读取角度和距离测量值。激光跟踪器头围绕着两根正交轴旋转。每根轴具有一个编码器用于角度测量和一只直接供电的DC 电动机来进行遥控移动。传感器头的油缸包含了一个测量距离差的单频激光干涉测距仪(IFM ),还有一个绝对距离测量装置(ADM )。激光束通过安装在倾斜轴和旋转轴交叉处的一面镜子直指反射器。激光束也用作为仪器的平行瞄正轴。挨着激光干涉仪的光电探测器(PSD)接收部分反射光束,使跟踪器跟随反射器。 图 2.2 激光跟踪仪结构原理图 (2)控制器: 包含电源、编码器和干涉仪用计数器、电动机放大器、跟踪处理器和网卡(图2.3 )。跟踪处理器将跟踪器内的信号转化成角度和距离观测值,通过局域网卡将数据传送到应用计算机上,同理从计算机中发出的指令也可以通过跟踪处理器进行转换再传送给跟踪器,完成测量操作。
1.1 概述 激光跟踪测量系统(Laser Tracker System)是工业测量系统中一种高精度的大尺寸测量仪器。它集合了激光干涉测距技术、光电探测技术、精密机械技术、计算机及控制技术、现代数值计算理论等各种先进技术,对空间运动目标进行跟踪并实时测量目标的空间三维坐标。它具有高精度、高效率、实时跟踪测量、安装快捷、操作简便等特点,适合于大尺寸工件配装测量。SMART310是Leica公司在1990年生产的第一台激光跟踪仪,1993年Leica公司又推出了SMART310的第二代产品,其后,Leica公司还推出了LT/LTD系列的激光跟踪仪,以满足不同的工业生产需要。LTD系列的激光跟踪仪采用了Leica公司专利的绝对测距仪,测量速度快,精度高,配套的软件则在Leica统一的工业测量系统平台Axyz下进行开发,包括经纬仪测量模块、全站仪测量模块、激光跟踪仪测量模 块和数字摄影测量模块等[8]。 激光跟踪系统在我国的应用始于1996年,上飞、沈飞集团在我国第一次引进了SMART310激光跟踪系统;2005年上海盾构公司引进了Leica公司的一套LTD600跟踪测量系统,应用于三维管模的检测。 1.2 激光跟踪测量系统的基本原理[52] 近年来,激光跟踪测量系统的应用领域在不断扩大,很多公司都相继推出了各自品牌的激光跟踪仪,但所有的激光跟踪测量系统基本都是由激光跟踪头(跟踪仪)、控制器、用户计算机、反射器(靶镜)及测量附件等组成的。在本文中,实验采用的是LTD600激光跟踪测量系统(图2.1),因此具体讨论的基本原理是基于LTD600型的激光跟踪测量系统。 图2.1 LTD600激光跟踪测量系统 1.2.1 系统的组成 激光跟踪仪的实质是一台能激光干涉测距和自动跟踪测角测距的全站仪,区别之处在于它没有望远镜,跟踪头的激光束、旋转镜和旋转轴构成了激光跟踪仪的
用户经验谈 Self Levelling Metal Machines Pte Ltd 车工专家采用FARO 激光跟踪仪(FARO Laser Tracker),只需耗费一半时间,即可达到更高精度 更高智能的工程与技术往往是促进任何工业发展的关键动力。其中,精密工程科学至今依然是制造业的复杂制造工艺的核心因素。Self Levelling Metal Machines Pte Ltd (SLMM)正是一家精密工程公司,该公司是业务遍布全球的Self Levelling Machines (SLM)公司属下成员之一。SLMM 创办于2000年,是Self Levelling Machines (Australia)与Metal Machines Engineering Services (Singapore)两家公司的联盟企业,公司总部设在新加坡。SLMM 为多家公司提供巨型的原位精密车工服务,包括镗孔、铣削及钻孔等。SLMM 项目工程师Lok Qiuquan 分享其经验时表示,“我们多数客户是来自海事与岸外工业。我们所从事的岸外石油加工产品包括浮式生產儲油及卸油系統(FPSO)、转塔系泊系统、岸外起重機及悬链锚腿系泊(CALM)浮筒等等。这些部件的体积非常巨大,无法放置在一般的车工中心,我们必须将设备带到客户所在地点,在现场为他们进行车削。”SLMM 所承接的所有项目,都必须在车削工作开始前及完成后进行检验。模拟安装、机器对准及几何尺寸检验等都是SLMM 的日常工作之一。“这些工作需要详细测量,每次测量的条件都可能有所不同。”Lok 表示,“测量对象可能是30毫米的小孔,也可能是直径30米的巨型结构,经常需要使用多种不同的传统仪器和手持工具。”这些测量方法尽管效果相对良好,但是SLMM 依然在寻求效率更高的替代方法。“由于我们的项目日益复杂,我们意识到需要改善工作流程,以防止出现瓶颈。我们的美国伙伴向我们推荐FARO 激光跟踪仪,因为他们使用后觉得效果极好,尤其是针对需要用到圆形自调平机器(CSLMs)的项目而言。我们开始使用FARO 仪器之后,我们的工作流程在许多方法都大为改善,远远超越我们的预期。“Lok 特别指出。 ■ 过去在工作流程方面的挑战 SLMM 的工程师原本是根据工作的性质,选用项目现场所需要的各种测量仪器与设备。SLMM 所拥有的测量仪器与设备种类繁多,包括校准测量尺和激光检验设备、光学仪、内径管形千分尺、外径千分尺及内孔测量规等。 Lok 表示,“采用这些传统的仪器与手持工具,有时需要另外重新制造一些测量设备,才能对某些特别项目进行测量,意味着需要花更多时间与努力。如果这些设备带到现场之后发现不合用,我们的努力就完全白费了。此外,我们也需要技术纯熟及谨慎的技术人员来进行测量,因为这些测量数据都是人工收集 FARO 激光跟踪仪进行设置安装检查
激光跟踪仪培训报告文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-
激光跟踪仪 培训总结报告 培训参加人:*** 所属部门:******* 培训时间: 培训报告总结 一、激光跟踪仪的基本工作原理、组成、安全注意事项 1、激光跟踪仪的基本工作原理 激光跟踪测量系统的工作基本原理是在目标点上安置一个反射器,跟踪头发出的激光射到反射器上,又返回到跟踪头,当目标移动时,跟踪头调整光束方向来对准目标。同时,返回光束为检测系统所接收,用来测算目标的空间位置。简单的说,激光跟踪测量系统的所要解决的问题是静态或动态地跟踪一个在空间中运动的点,同时确定目标点的空间坐标 2、激光跟踪仪的组成及安全注意事项 1、激光跟踪仪的组成 1、跟踪头和控制箱 2、5M连接电缆(用于连接跟踪头与控制箱) 3、气象站(一根1.5米连接线,一个空气温度传感器,一个材料温度传感器,一个大气压传感器) 4、网线 5、球头 6、电缆包8、靶球清洁套装9、防尘盖 3激光跟踪仪的安全注意事项 二、学习激光跟踪仪检验软件和测量软件 1. 开机之前的方案 1.设计测量方案 2.跟踪仪校验:前后视、1点QVC、4点QVC等 3.使用SpatialAnalyzer采集测量 4.根据测量点集拟合形状 5.根据测量和拟合结果使用图形来评价 2. 激光跟踪仪安装好后校核软件的使用、测量软件的使用 1校验软件Trackercal的使用 1.开机必须设置计算机IP,否则程序不认同,IP地址设置为
2.点击Trackercal软件图标打开软件,选择仪器,点击连接跟踪仪。 3.运用前后视检查功能(Ctrl+F),检测跟踪仪的前后视偏差,将靶球放置在3M 以外的地方固定住,单击前后置检查,若偏差在大于0.0001小于0.0004则需要采用1点QVC,将靶球放置在5M外,单击补偿,若水平和垂直角度偏差大于0.002则需要进行4点QVC误差补偿,补偿方法如下 4.QVC实现误差补偿,4点QVC进行全方位补偿,将靶球放回鸟巢后点击fullQVC,根据软件向导进行操作完成补偿,选择四个点ABCD,A点将靶球固定在距离跟踪仪0.5M左右,在0度左右的俯仰角上点击PICK UP THIS POINT;B点将靶球固定在距离跟踪仪3M左右的范围,在0度左右的俯仰角范围内,点击PICK UP THIS POINT;C点将靶球固定在距离跟踪仪1M左右,在55°正负5°的俯仰角范围内,I 点击PICK UP THIS POINT ;D点将靶球固定在距离跟踪仪1M左右,在负55°正负5°的俯仰角范围内,I点击PICK UP THIS POINT,保存补偿结果 5.补偿操作完成之后再次用前后视检查功能检测结果。 2、测量软件SpatialAnalyzer的使用,我们主要学习单点测量、稳定点测量和空间扫描 1.打开SA软件并与跟踪仪联机,确定绿灯常亮。 2.选中1.5英寸靶球,选择测量,测量有单点测量(1把 SMR 放进跟踪器上标有“0”的磁座里。 2点击测量按钮(Measure)。测量对话框会显示之前输入的参数并报告测量的经过。这个对话框一般会在任何类型的测量中显示。3然后依次把SMR 放进编号“1”“2”等的磁座里,至少依次放进 4 个磁座,这个步骤对以后的测量中很重要。 4这样就用单点测量模式完成了单独点集的测量。请注意软件 SA 中的点),稳定点测量,空间扫描测量,选择其中一种测量模式,配合靶球底座,平稳放置在测量物平面之上,选择合适位置进行测量。如单点测量的话就要一点一点分别点击测量,选择几个点就要点击几次测量;稳定点测量就是等靶球稳定之后跟踪仪会自动测量,只需要点击一次测量就可以了;空间扫描就是点击测量之后它会根据你行走路线及设置,自动采集多个点形成一个轮廓。 3.使用“构造”功能,构成一个平面,在上面选择“点位于平面之上”,并更改偏移量,靶球座是多大的就填写多大的,一般我们使用“25.4”。 4.使用“查询—多个点—到对象”功能,生成一个矢量组,能够根据图来反映被测平面的凹凸情况。 5.使用“关系—几何图形拟合—只进行拟合”功能,生成被测平面的平面度。 6.在界面上找到“拍照”功能的按钮,点击拍摄功能,可以有利于生成报告,更好的表达出测量结果。 7.将需要的测量结果拖拽到“动态报告”中,生成PDF格式报告。 三、参与培训的感受 经过这为期三天多的学习Radian激光跟踪仪培训,二次培训更加深对激光跟 踪仪的印象,对激光跟踪仪安装及安全规程有了更深的了解,使我学到了现场设 备保全的理论知识,还实地的测量了机器人。
激光跟踪仪应用介绍 问:公司现在使用的多功能精密检测设备是? 答:全称Leica激光跟踪仪AT401,激光跟踪仪以其优异的性能成为超大空间范围内的精密坐标测量设备,凭借内部电池供电以及对恶劣环境的适应能力,它可以在各种工作条件下保持最高精度的测量。问:Leica激光跟踪仪AT401的便携性能如何? 答:Leica激光跟踪仪AT401整个测量系统轻于15kg,包括便携包装箱及紧凑放置其中的全部附件,甚至可放置在大多数的商用飞机顶部行李箱,真正成为全球最便携的坐标测量系统(CMM)。 问:Leica激光跟踪仪AT401在何种环境中可以使用? 答:Leica激光跟踪仪AT401全密封的结构设计,并通过IP54(IEC 60529)独立验证,确保系统可以在最恶劣的情况下运行。冷却液喷洒、碳末、焊接飞溅物等都不会对设备造成影响。AT401是第一台通过验证的户外(包括在雨中)使用激光跟踪仪。 防护等级:IP54 运行温度:0℃至40℃ 湿度:最大95% 工作海拔高度:-700m至5500m 问:Leica激光跟踪仪AT401的检测靠什么实现: 答:Leica于2009年引入PowerLock自动目标锁定功能。这种光学技术可自动探测反射球并快速锁定激光束,对正在移动的反射球也
毫不例外。这种技术打破了过去操作者需要在“黑暗状态”寻找光束的传统方法,而是激光束直接锁定使用者的手持目标使整个激光跟踪仪的操作更加简单。 问:Leica激光跟踪仪AT401机器供电以及无线操作: 答:Leica激光跟踪仪AT401带有两块电池,一块在传感器中,另一块在控制器中,可供设备一整天工作使用。当电量接近零时,电池可以更换或者自动热交换,激光跟踪仪可继续工作。同时设备集成了WiFi,使之成为一个完全无线的移动测量机。该设备可以通过以太网供电。基于此技术,普通的网线就可以给传感器传输数据和供电。问:Leica激光跟踪仪AT401关于测量范围: 答:Leica激光跟踪仪AT401带有无限旋转的传感器可以水平全方位360°和垂直290°测量,具有320m测量范围。 问:Leica激光跟踪仪AT401跟踪仪的技术参数说明 答:参见以下内容 技术特点说明 IP54防护等级 根据IEC60529标准独立认证,适用于极端 的工作条件 超轻、超紧凑系统:8.1K g,包括控制器, 整体高度290mm 在一般激光系统无法工作的条件下测量,控制器直接安装在三脚架上,不需占用额外空间 无线设计 集成WiFi通讯技术及机载电池,系统可工 作于全无线状态
分时多站式激光跟踪仪测量系统 课程名称:光机电一体化 院系:机械工程学院 班级:硕3002班 姓名:周强 学号: 3113001060
目录 1 激光跟踪仪系统 (1) 1.1 激光跟踪仪系统的概述 (1) 1.2 激光跟踪仪系统的基本原理 (1) 1.2.1 系统的组成 (2) 1.2.2 激光跟踪仪系统的原理 (3) 2 分时多站式激光跟踪仪测量系统 (7) 2.1 引言 (7) 2.2 基于GPS多边形定位原理 (7) 2.3 分时测量的算法 (9) 2.3.1 激光跟踪仪基站的自标定 (9) 2.3.2 测量点坐标的标定 (10)
1 激光跟踪仪系统 1.1激光跟踪仪系统的概述 激光跟踪测量系统(Laser Tracker System)是工业测量系统中一种高精度的大尺寸测量仪器。它集合了激光干涉测距技术、光电探测技术、精密机械技术、计算机及控制技术、现代数值计算理论等各种先进技术,对空间运动目标进行跟踪并实时测量目标的空间三维坐标。它具有高精度、高效率、实时跟踪测量、安装快捷、操作简便等特点,适合于大尺寸工件配装测量,测量静止目标,跟踪和测量移动目标或它们的组合。SMART310是Leica公司在1990年生产的第一台激光跟踪仪,1993年Leica公司又推出了SMART310的第二代产品,其后,Leica公司还推出了LT/LTD系列的激光跟踪仪,以满足不同的工业生产需要。LTD系列的激光跟踪仪采用了Leica公司专利的绝对测距仪,测量速度快,精度高,配套的软件则在Leica统一的工业测量系统平台Axyz 下进行开发,包括经纬仪测量模块、全站仪测量模块、激光跟踪仪测量模块和数字摄影测量模块等。激光跟踪系统在我国的应用始于1996年,上飞、沈飞集团在我国第一次引进了SMART310激光跟踪系统;2005年上海盾构公司引进了Leica公司的一套LTD600跟踪测量系统,应用于三维管模的检测。 (a)API的激光跟踪仪(b) Leica的激光跟踪仪(c)Faro的激光跟踪仪 图1-1 API等公司生产的激光跟踪仪 1.2激光跟踪仪系统的基本原理 近年来,激光跟踪测量系统的应用领域在不断扩大,很多公司都相继推出了各自品牌的激光跟踪仪,但所有的激光跟踪测量系统基本都是由激光跟踪头(跟踪仪)、控制器、用户计算机、反射器(靶镜)及测量附件等组成的。实验采用的是Leica AT 901 MR激光跟踪测量系统。
概述1.1 激光跟踪测量系统(Laser Tracker System)是工业测量系统中一种高精度的 大尺寸测量仪器。它集合了激光干涉测距技术、光电探测技术、精密机械技术、计算机及控制技术、现代数值计算理论等各种先进技术,对空间运动目标进行跟踪并实时测量目标的空间三维坐标。它具有高精度、高效率、实时跟踪测量、安装快捷、操作简便等特点,适合于大尺寸工件配装测量。SMART310是Leica公司在1990年生产的第一台激光跟踪仪,1993年Leica公司又推出了SMART310的第二代产品,其后,Leica公司还推出了LT/LTD系列的激光跟踪仪,以满足不同的工业生产需要。LTD系列的激光跟踪仪采用了Leica公司专利的绝对测距仪,测量速度快,精度高,配套的软件则在Leica统一的工业测量系统平台Axyz 下进行开发,包括经纬仪测量模块、全站仪测量模块、激光跟踪仪测量模[8]。块和数字摄影测量模块等 激光跟踪系统在我国的应用始于1996年,上飞、沈飞集团在我国第一次引进了SMART310激光跟踪系统;2005年上海盾构公司引进了Leica公司的一套LTD600跟踪测量系统,应用于三维管模的检测。 [52]激光跟踪测量系统的基本原理1.2 近年来,激光跟踪测量系统的应用领域在不断扩大,很多公司都相继推出了 各自品牌的激光跟踪仪,但所有的激光跟踪测量系统基本都是由激光跟踪头(跟踪仪)、控制器、用户计算机、反射器(靶镜)及测量附件等组成的。在本文中,实验采用的是LTD600激光跟踪测量系统(图2.1),因此具体讨论的基本原理是基于LTD600型的激光跟踪测量系统。 图2.1 LTD600激光跟踪测量系统 系统的组成1.2.1 激光跟踪仪的实质是一台能激光干涉测距和自动跟踪测角测距的全站仪,区 别之处在于它没有望远镜,跟踪头的激光束、旋转镜和旋转轴构成了激光跟踪仪的三个轴,三轴相交的中心是测量坐标系的原点。它的结构原理如图2.2所示。系统的硬件主要组成部分包括:传感器头、控制器、电动机和传感器电缆、带LAN电缆的应用计算机以及反射器。 (1) 传感器头:读取角度和距离测量值。激光跟踪器头围绕着两根正交轴旋转。每根轴具有一个编码器用于角度测量和一只直接供电的DC电动机来进行遥控 移动。传感器头的油缸包含了一个测量距离差的单频激光干涉测距仪(IFM),还有一个绝对距离测量装置(ADM)。激光束通过安装在倾斜轴和旋转轴交叉处的一面镜子直指反射器。激光束也用作为仪器的平行瞄正轴。挨着激光干涉仪的光电探测器(PSD)接收部分反射光束,使跟踪器跟随反射器。 图2.2 激光跟踪仪结构原理图 (2) 控制器: 包含电源、编码器和干涉仪用计数器、电动机放大器、跟踪处理器
第37卷,增刊红外与激光工程 2008年4月 V ol.37 Supplement Infrared and Laser Engineering Apr. 2008 收稿日期:2008-04-13 基金项目:国家自然科学基金项目(50475038;精密测试技术及仪器国家重点实验室开放基金资助项目 作者简介:闫勇刚(1978-),男,河南孟州人,讲师,主要从事激光测量技术及仪器方面的研究工作。Email: yonggang_yan@https://www.doczj.com/doc/d412133391.html, 激光跟踪仪校准技术及在机床检测中的应用 闫勇刚1,欧阳健飞 1,杨红果2,夏飞1 (1.河南理工大学精密工程研究所河南焦作 454003;2. 焦作师范高等专科学校河南焦作 454000
摘要:讨论了激光跟踪仪的校准技术,分析了测量误差来源及误差对跟踪仪产生的影响,并利用三坐标测量机对激光跟踪仪进行了校准。结合生产需要,利用激光跟踪仪高效地对大型机床进行检测,制定了激光跟踪仪检测大型机床的方法。结果显示,利用激光跟踪仪能够精确地、高效地对机床进行检测,并指导工人对机床进行维护和调整。研究结果表明,激光跟踪仪不仅能对现场的机床进行精度检测,而且能对不易搬动的零部件、生产线以及夹具等进行测量。 关键词:校准;激光跟踪仪;误差来源;机床检测 中图分类号:V556.7 文献标识码:A 文章编号:1007-2276(2008增(几何量-0158-04 Calibration of laser tracker and its application in detection of machining tool YAN Yong-gang1, OUYANG Jian-fei1, YANG Hongguo 2, XIA Fei 1 (1. Precision Engineering Institute, Henan Polytechnic University, Jiaozuo 454003, China; 2. Jiaozuo Teachers College, Jiaozuo 454000,China Abstract: Calibration method for laser tracker was discussed and error sources were anlyzed. Calibration was carried on by use of CMM. Laser tracker was used to detect large-scale machining tool. Then the measuring method was described detailedly. The result shows the machining tool can be checked precisely and high effiently by laser tracker. The paper also shows both the machining tools and other large-scale objects, such as assembly line and jig, can be measured by laser tracker. Key words: Calibration; Laser tacker; Error sources; Machining tool detection 0 引言
Etalon激光跟踪仪产品介绍 背景: 数控机床由于其本身的运动比较复杂,因此其运动过程中产生的各种误差相对来说也比较复杂。现以三轴加工中心为例,其共有21项误差元素,包括3个线性误差,6个直线度误差,3个垂直度误差,3个俯仰角误差,3个偏摆角误差以及3个旋转角误差(见图1所示)。传统的测量仪器没有考虑俯仰角、偏摆角和旋转角的误差,精度不高,并且机床的体积定位精度的完整检测非常复杂耗时。Etalon激光跟踪仪的开发成功解决了这一问题,一台三轴机床所有21个误差都能被快速高效的捕捉. 线性位移误差:Dx(x)、Dy(y)和Dz(z) 水平平面内直线度误差:Dy(x)、Dx(y)和Dx(z) 垂直平面内直线度误差:Dz(x)、Dz(y)和Dy(z) 旋转角度误差:Ax(x)、Ay(y)和Az(z) 俯仰角度误差:Ay(x)、Ax(y)和Ax(z) 偏摆角度误差:Az(x)、Ax(y)和Ay(z) 垂直度误差:Φxy、Φyz和Φxz 图1:3轴数控机床的全部21个误差
测量原理: Etalon激光跟踪仪与传统激光干涉仪测量原理最大不同在于,它采用多步法体积定位测量方法对所有21个误差进行测量和捕捉。 按国际标准化组织定义,沿体对角线测得的位移误差是机床21项误差的综合反映,我们可以将沿体对角线方向测得的位移误差看成三个运动轴分别运动时产生的位置误差在体对角线方向的投影,沿每个轴的位移误差有三项,沿X轴的误差为:Dx(x)、Dy(x)、Dz(x),沿Y和Z分别为:Dx(y)、Dy(y)、Dz(y)、Dx(z)、Dy(z)、Dz(z)(如图1所示)。上述9项位置误差中实际上包含了三个轴运动时产生的所有21项误差(线性位移误差、直线度误差、转角误差、垂直度误差,甚至其它一些非刚体运动误差),因此9项位置误差反映了机床的空间位置精度。从误差补偿的角度看,对于具有空间位置误差补偿功能的数控系统来说,只要补偿该9项位置误差就相当于补偿了机床的所有几何误差元素对机床位置精度的影响,如补偿X轴的运动误差时,Dx(x)由X轴补偿,Dy(x)、Dz(x) 可分别通过Y、Z轴补偿,因此只要将九项位置误差数据经处理按补偿格式传入数控系统即可实现机床的几何误差补偿,来提高机床体积定位精度。由此Etalon公司采用了多步法体积定位测量。 多步法体积定位测量的最大优点在于其测量方向和运动的方向可以不在同一个方向,这样,测量的结果对多个方向的误差都敏感,从而多个方向的误差都被包含进去,只要通过将误差从整体分离到各个方向,我们就能得到比传统的测量方法更多的数据量,从而可以对误差分离并对其进行补偿。其测量过程如图2所示。进行多步测量,必须首先定义对角线起始点(0,0,0)以及终点(X,Y,Z)。由此可知机床的工作空间范围为X×Y×Z。假设每轴的测量点数为n,则所有测量点数为3n,各轴的增量分别为Dx、Dy、Dz,其中:Dx=X/n,Dy=Y/n,Dz=Z/n。 如图3所示机床共有四条体对角线。这里以一条为例,即a→g。采用多步测量法对该条对角线测量的路径如下:安装在主轴上的移动光靶从a点(0,0,0)开始,移动Dx 后,暂停,暂停过程中,软件会自动采集数据,而后在Y方向以相同的进给率以及暂停时间移动Dy,最后在Z轴方向以相同的进给率和暂停时间移动Dz,重复上述步骤一直到移动到体对角线的另一点g。对于其它三条对角线而言,要分别改变起始点和各轴的增量来进行测量。
激光跟踪仪操作指导书 1 软件名称:Metrolog/SILMA 1.1 序列号:No.15954 1.2 软件授权文件的获取: 1.2.1插上软件狗; 1.2.2连接外网; 1.2.3双击Protection→Web Read→Programmer→installed successfully(提示) ; 1.2.4 OK. 2 开关机次序 2.1 开机次序:电源(黑色)→伺服电机(红色,主机移动时关掉) 2.2 关机次序:伺服电机(红色)→电源(黑色) 3 网络设置: 3.1 IP设置:192.168.0.100 / 255.255.255.0 3.2 无线路由器IP:192.168.0.110 / 255.255.255.0 3.2.1用于控制器与电脑的无线连接; 3.2.2用于控制器与智能测头的无线连接。 4 配置参数: 4.1 初始参数文件:4048.PRM 4.2 靶球校准的配置文件:Probe files→API Probes.plp 4.3 I-Probe测头文件:4001_IProbe.prm 5 预热 预热15~30分钟后,跟踪头上红灯不再闪烁(常亮):
5.1 ADM:红外激光器,可断光续接; 5.2 IFM:双频激光干涉仪,氦氖激光器,断光不能续接; 5.3 校准软件:Trackercal 4.12 / 测量软件:Metrolog XG V13.004 5.4 测量软件:Metrolog XG V13.004 5.5 位置坐标: AZ------水平转角 EL------俯仰角 D ------极径/距离 注意:校准软件和测量软件不能同时打开 6 环境传感器 6.1 大气压力------自动测量 6.2 空气温度------自动测量 6.3 材料温度------自动测量,人工补偿 7 校准软件: Trackercal 4.12使用:Azimuth------方位角 Elevation------仰角 7.1 3个角度校准空间/前后视/单点 7.2 2个距离校准 8 测座种类: 8.1 SM-TM:定位座,4个,转站用; 8.2 ESM:边沿测座,高度偏移25mm; 8.3 SSM:平面测座,高度偏移25mm; 8.4 SMN:圆柱销座,4个,其中英制圆柱销座(1″)1个,用于测量基准孔中心,也可当ESM边沿测座用
激光跟踪仪系统在航空领域的应用 摘要:介绍目前飞机装配、制造中具有代表性的计算机辅助测量系统设备——激光跟踪仪系统的工作原理及功能,并结合实例介绍了激光跟踪仪系统的应用,以及激光跟踪仪系统的发展趋势。 关键词:计算机辅助测量系统激光跟踪仪装配工装全机水平测量 1.激光跟踪仪系统 1.1激光跟踪仪系统的概念 激光跟踪测量系统(Laser Tracker System)是工业测量系统中一种高精度的大尺寸测量仪器。它集合了激光干涉测距技术、光电探测技术、精密机械技术、计算机及控制技术、现代数值计算理论等各种先进技术,对空间运动目标进行跟踪并实时测量目标的空间三维坐标。它具有高精度、高效率、实时跟踪测量、安装快捷、操作简便等特点,适合 于大尺寸工件配装测量,测量静止 目标,跟踪和测量移动目标或它 们的组合。SMART310是Leica公 司在1990年生产的第一台激光跟踪 仪,1993年Leica公司又推出了 SMART310的第二代产品,其后, Leica公司还推出了LT/LTD系列的 激光跟踪仪,以满足不同的工业生 产需要。激光跟踪仪因不同领域需 要,其种类也有很多种,在此仅以 航空领域应用较多的一类激光跟踪 仪为对象进行介绍。 图1
1.2激光跟踪仪系统的组成 激光跟踪仪的实质是一台能激光干涉测距和自动跟踪测角测距的全站仪,区别之处在于它没有望远镜,跟踪头的激光束、旋转镜和旋转轴构成了激光跟踪仪的三个轴,三轴相交的中心是测量坐标系的原点。系统的硬件主要组成部分包括:传感器头、控制器、电动机和传感器电缆、带LAN电缆的应用计算机以及反射器。见图2 图2 (1) 传感器头:读取角度和距离测量值。激光跟踪器头围绕着两根正交轴旋转。每根轴具有一个编码器用于角度测量和一只直接供电的DC电动机来进行遥控移动。传感器头的油缸包含了一个测量距离差的单频激光干涉测距仪(IFM),还有一个绝对距离测量装置(ADM)。激光束通过安装在倾斜轴和旋转轴交叉处的一面镜子直指反射器。激光束也用作为仪器的平行瞄正轴。挨着激光干涉仪的光电探测器(PSD)接收部分反射光束,使跟踪器跟随反射器。见图3 鸟巢 图3
激光跟踪仪培训报告文件编码(GHTU-UITID-GGBKT-POIU-WUUI-8968)
激光跟踪仪 培训总结报告 培训参加人:*** 所属部门:******* 培训时间: 培训报告总结 一、激光跟踪仪的基本工作原理、组成、安全注意事项 1、激光跟踪仪的基本工作原理 激光跟踪测量系统的工作基本原理是在目标点上安置一个反射器,跟踪头发出的激光射到反射器上,又返回到跟踪头,当目标移动时,跟踪头调整光束方向来对准目标。同时,返回光束为检测系统所接收,用来测算目标的空间位置。简单的说,激光跟踪测量系统的所要解决的问题是静态或动态地跟踪一个在空间中运动的点,同时确定目标点的空间坐标2、激光跟踪仪的组成及安全注意事项 1、激光跟踪仪的组成 1、跟踪头和控制箱 2、5M连接电缆(用于连接跟踪头与控制箱) 3、气象站(一根1.5米连接线,一个空气温度传感器,一个材料温度传感器,一个大气压传感器) 4、网线 5、球头 6、电缆包8、靶球清洁套装9、防尘盖 3激光跟踪仪的安全注意事项 二、学习激光跟踪仪检验软件和测量软件 1.开机之前的方案 1.设计测量方案 2.跟踪仪校验:前后视、1点QVC、4点QVC等 3.使用SpatialAnalyzer采集测量 4.根据测量点集拟合形状 5.根据测量和拟合结果使用图形来评价 2.激光跟踪仪安装好后校核软件的使用、测量软件的使用 1校验软件Trackercal的使用 1.开机必须设置计算机IP,否则程序不认同,IP地址设置为
2.点击Trackercal软件图标打开软件,选择仪器,点击连接跟踪仪。 3.运用前后视检查功能(Ctrl+F),检测跟踪仪的前后视偏差,将靶球放置在3M以外的地方固定住,单击前后置检查,若偏差在大于0.0001小于0.0004则需要采用1点QVC,将靶球放置在5M外,单击补偿,若水平和垂直角度偏差大于0.002则需要进行4点QVC 误差补偿,补偿方法如下 4.QVC实现误差补偿,4点QVC进行全方位补偿,将靶球放回鸟巢后点击fullQVC,根据软件向导进行操作完成补偿,选择四个点ABCD,A点将靶球固定在距离跟踪仪0.5M左右,在0度左右的俯仰角上点击PICKUPTHISPOINT;B点将靶球固定在距离跟踪仪3M左右的范围,在0度左右的俯仰角范围内,点击PICKUPTHISPOINT;C点将靶球固定在距离跟踪仪1M左右,在55°正负5°的俯仰角范围内,I点击PICKUPTHISPOINT;D点将靶球固定在距离跟踪仪1M左右,在负55°正负5°的俯仰角范围内,I点击PICKUPTHISPOINT,保存补偿结果 5.补偿操作完成之后再次用前后视检查功能检测结果。 2、测量软件SpatialAnalyzer的使用,我们主要学习单点测量、稳定点测量和空间扫描 1.打开SA软件并与跟踪仪联机,确定绿灯常亮。 2.选中1.5英寸靶球,选择测量,测量有单点测量(1把SMR放进跟踪器上标有“0”的磁座里。2点击测量按钮(Measure)。测量对话框会显示之前输入的参数并报告测量的经过。这个对话框一般会在任何类型的测量中显示。3然后依次把SMR放进编号“1”“2”等的磁座里,至少依次放进4个磁座,这个步骤对以后的测量中很重要。4这样就用单点测量模式完成了单独点集的测量。请注意软件SA中的点),稳定点测量,空间扫描测量,选择其中一种测量模式,配合靶球底座,平稳放置在测量物平面之上,选择合适位置进行测量。如单点测量的话就要一点一点分别点击测量,选择几个点就要点击几次测量;稳定点测量就是等靶球稳定之后跟踪仪会自动测量,只需要点击一次测量就可以了;空间扫描就是点击测量之后它会根据你行走路线及设置,自动采集多个点形成一个轮廓。 3.使用“构造”功能,构成一个平面,在上面选择“点位于平面之上”,并更改偏移量,靶球座是多大的就填写多大的,一般我们使用“25.4”。 4.使用“查询—多个点—到对象”功能,生成一个矢量组,能够根据图来反映被测平面的凹凸情况。 5.使用“关系—几何图形拟合—只进行拟合”功能,生成被测平面的平面度。 6.在界面上找到“拍照”功能的按钮,点击拍摄功能,可以有利于生成报告,更好的表达出测量结果。 7.将需要的测量结果拖拽到“动态报告”中,生成PDF格式报告。 三、参与培训的感受 经过这为期三天多的学习Radian激光跟踪仪培训,二次培训更加深对激光跟踪仪的印象,对激光跟踪仪安装及安全规程有了更深的了解,使我学到了现场设备保全的理论知识,还实地的测量了机器人。
https://www.doczj.com/doc/d412133391.html, CAD Resources Pick nominal geometries with a single click - or let the software find them for you. New and Improved Alignments Six-point freeform surface, RPS, and three geometry alignment. Engineered for maximum efficiency in computer-aided measurement and 3D inspection, FARO‘s proprietary CAM2 Q software allows you to complete high-precision measurement jobs with simplicity and confidence. Offering you the flexibility to measure the way your process or job requires, CAM2 Q is ideal for CAD and non CAD-based inspection and Geometric Dimensioning and Tolerancing (GD&T). CAM2 Q support features include image-guided measurement, automatic nominal association to various features, and Quicktools for building part programs. Aerospace: Alignment, tooling & mould certification, part inspection ? Automotive: Tool building & certification, alignment, part inspection ? Metal Fabrication: On-ma -chine inspection, first article inspection, periodic part inspection ? Moulding/Tool & Die: Mould and die inspection, prototype part scanning Solid Measurement Made Simple Common Applications Measure and report using cartesian, cylindrical or spherical coordinate systems Automatic nominal association from CAD NIST-tested and PTB-certified geom -etry calculation algorithms Flexible measurement workflows for novice and experienced users Multiple options for exporting meas -urment results Maximize the efficiency of your Laser Tracker with qTouch, Bundle Adjust -ment and Survey features Features & Benefits Measure your parts quickly Start measuring immediately, without need -ing to interact or tell the software what is beign measured. Also, using the new qTouch iPhone application, measure at a distance but running instructions to CAM2 Q and revieving the real-time results from your measurements on your iPhone. Repeated part measurement Measurement of multiple parts can be simplified using QuickTools programming. Develop part programs quickly by record -ing the steps of the first measurement. Later add pictures to the measurement steps to provide easy graphical instructions for the operators. FARO ? CAM2? Q