空间机构动力学分析方法的研究
RESEARCH OF SPATIAL MECHANISM DYNAMICS ANALYSIS METHODS
袁清珂 1
刘大慧1
惠延波2
张明天1
成思源
1
(1.广东工业大学机电工程学院,广州510006)
(2.河南工业大学机电工程学院,郑州450007)
YU AN QingKe 1
LIU DaHui 1
HUI YanBo 2
ZHANG MingTian 1
CHENG SiYuan
1
(1.College o f Mechanical &Electrical Engineering ,Guangdong University o f Technology ,Guangzhou 510006,China )
(2.College o f Mechanical Engineering ,Henan University o f Technology ,Zhengzhou 450007,China )
摘要 在空间机构中约束运动副处的构件上建立笛卡尔直角坐标系,开发描述空间机构结构形态的符号体系,讨论杆件形状矩阵和约束运动矩阵,在运动链上连续使用变换矩阵,建立空间机构的运动方程,分析空间机构二种类型的动力学建模与分析方法,在此基础上开发空间机构动力学通用分析软件,并给出应用实例。
关键词 空间机构 机械学 运动学 动力学 数值方法 软件工程中图分类号 TH112 TH113
Abstract Cartesian coordinate sys tems were built on the two links at a cons train t kinematics pair respectively,so a notation set to describing spatial mechanis ms was established.Link shape matrices and constraint motion matrices were discussed.By in series usin g these transform matrices on a kinematics chain,the motion equations of spatial mechanisms were set up.The modeling and analyzin g methods for two kinds of spatial mechanis m dynamics problems were explored.Based on the above research,the general analysis software spatial mechanisms dynamics were developed,an example was given.
Key words Spatial mechanism ;Mechanics ;Kinem atics ;Dynamics ;Numerical methods ;Software eng ineering Correspon ding author :YUAN Qing Ke ,E mail :qkyuan @gdut .edu .cn
The project supported by the National Natural Science Foundation of Chi na (No.50805025),and Guangdong Technological Plans Projects (No.2008B010400011),and Guangzhou T echnological Plans Projects (No.2008Z1 D371).
Manuscript received 20080821,in revi sed form 20090307.
引言
研制开发通用机构计算机自动分析软件,首先遇到的问题是如何以一种适当的计算机能够理解的
方式来描述机构的结构形态,使计算机能够自动识别机构、自动建立机构的运动方程、自动求解运动方程,并以数字和图形的方式输出结果。目前,常用的方法是基于机构分组的方法,通过数据文件表达机构的结构形态,这种方法存在描述机构范围有限和用户使用不便等不足。要实现机构分析软件的真正通用化和自动化,必须建立描述机构的通用方法和语言。通过通用方法和专用语言描述各种机构,计算机能识别这种描述,并且能通过这种描述自动识别机构的结构形态和运动链,自动建立机构运动方程,自动进行求解并输出结果。
本文在Denavit 和Hartenberg 提出的用于描述低副机构的描述方法(Denavit Hartenberg,D H )[1 2]
的基础
上,结合有关分析方法
[3 9]
,提出一种新的空间机构运
动建模与分析方法。在空间机构中约束运动副处的构件上建立笛卡尔直角坐标系,开发描述空间机构结构形态的符号体系,讨论杆件形状矩阵和约束运动矩阵,在运动链上连续变换矩阵,建立空间机构的运动方程,分析空间机构两种类型的动力学建模与分析方法,在此基础上,开发通用分析软件,并给出应用实例。
1 运动方程的建立
1.1 坐标系的建立
在空间机构中每一运动副处,分别在构成该运动副的两个构件上,根据运动副的性质和特征,按照不同的规律建立固结于构件上的直角坐标系,
在机构运动
Journal of Mechanical Strength
2011,33(1):040 044
袁清珂,男,1963年1月生,山东青岛人,汉族。广东工业大学教授,从事知识工程与智能设计、机电控制、多体动力学与计算机仿真、企业
信息化、电子商务与网络化制造的研究。
20080821收到初稿,20090307收到修改稿。国家自然科学基金(50805025)、广东省教育部产学研结合项目(2009B090300340)、广东省科技计划
(2008B010400011)、广州市科技计划(2008Z1 D371)资助。
的过程中,这些坐标系随构件一起运动。同一运动副处的不同构件上的两个直角坐标系之间的坐标变换描述该运动副的运动;同一构件上两个运动副处的坐标系之间的坐标变换描述该构件的运动状况。这样即可以用于描述机构的运动。
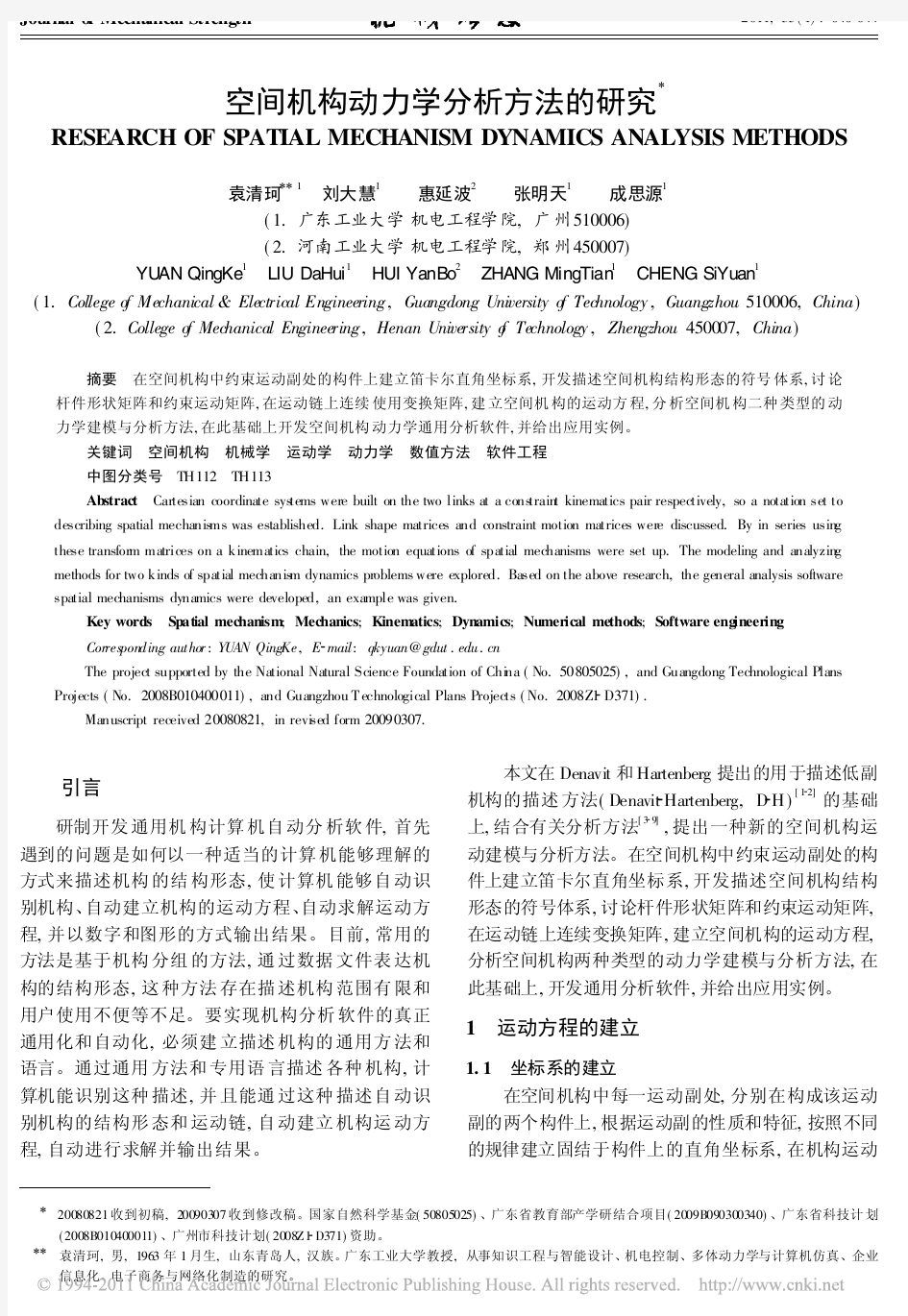
某一空间机构的两个相连接的构件G 、H ,如图1所示。对于每个构件建立两个直角坐标系X YZ 和UVW ,对于每个运动副而言形成两个直角坐标系。如运动副R j ,建立X j Y j Z j 和U j V j W j 两个直角坐标系,其中坐标系X j Y j Z j 固结于构件G ,坐标系U j V j W j 固结于构件H ,两坐标系的原点重合。这样X j Y j Z j 描述运动副R -j
,U j V j W j 描述运动R +
j ,而这两个坐标系的相对运动可用运动副R j 的运动变量 j 1, j 2, j 3描述,因此,可以利用两个直角坐标系的相对变化来描述空间机构的运动。例如,图1所示空间机构局部 杆件G 运动副R j 杆件H !可以用直角坐标系方法表示为 U i V i W i X j Y j
Z j U j V j W j X k Y k Z k !。
图1 空间机构局部Fig.1 A part of a spatial mechanis m
1.2 构件的运动状况描述
同一构件上两个运动副处的直角坐标系之间的变换矩阵描述该构件的运动状况,即构件的运动状况可用两直角坐标系之间的变换矩阵表示,对于图1所示
的构件H 而言,设其变换矩阵为T j k ,则 [1 U j V j W j ]T
=T j k [1 X k Y k Z k ]T
(1)
1.3 运动副的运动描述
同一运动副处两个直角坐标系的相对运动描述运动副的运动,其 j (q j , j )为运动副变量的函数。这样,通过求解该运动副处的两直角坐标系的相对运动或变换矩阵,即可求得该运动副的运动变量。
为便于计算机实现,用一矩阵描述运动副的运动,称为 运动变换!矩阵。这一矩阵以运动副的运动变量和运动副的特性参量为参数,描述运动副间的相对运动。其通式为 j (q j , j )。
对于图1所示的运动副R j 而言, j 可用 j 1、 j 2、 j 3
这三个变量描述,其中 j 1为U j 正向与X j 正向的夹角; j 2为V j 正向与Y j 正向的夹角; j 3为W j 正向与Z j 正向
的夹角。 j 的含义可用下式解释
[1 X j Y j Z j ]T
= j (q j , j )[1 U j V j W j ]
T
(2)
式中,q j 为运动副中运动变量组成的矢量,变量数目根据具体运动副类型而定,实际上它等于运动副的自由度,可取1~5个
[10]
。如铰链副和棱柱副都只有一个
自由度,因而运动副变量也只有一个;而球铰副和平面
副有3个自由度,因而各有3个运动副变量。
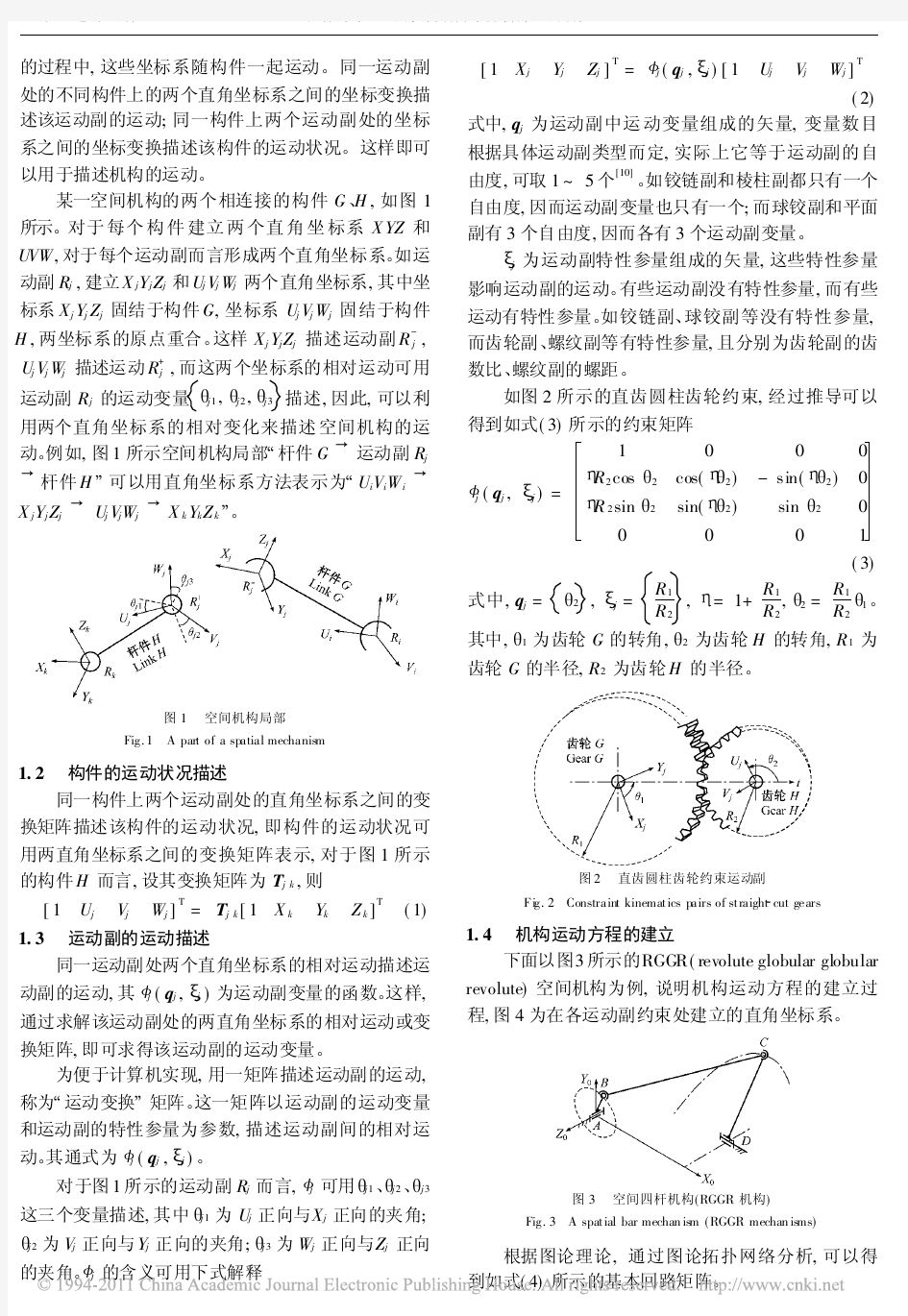
j 为运动副特性参量组成的矢量,这些特性参量影响运动副的运动。有些运动副没有特性参量,而有些运动有特性参量。如铰链副、球铰副等没有特性参量,而齿轮副、螺纹副等有特性参量,且分别为齿轮副的齿数比、螺纹副的螺距。
如图2所示的直齿圆柱齿轮约束,经过推导可以得到如式(3)所示的约束矩阵
j (q j , j )=
1000!R 2cos 2cos(! 2)-sin(! 2)0!R 2sin 2
sin(! 2)
sin 2
00
1(3)
式中,q j =
2, j =
R 1R 2,!=1+R 1R 2, 2=R 1
R 2 1
。其中, 1为齿轮G 的转角, 2为齿轮H 的转角,R 1为齿轮G 的半径,R 2为齿轮H 的半径。
图2 直齿圆柱齿轮约束运动副
Fi g.2 Constraint kinematics pairs of straight cut gears
1.4 机构运动方程的建立
下面以图3所示的RGGR(revolute globular globular revolute)空间机构为例,说明机构运动方程的建立过程,图4为在各运动副约束处建立的直角坐标系。
图3 空间四杆机构(RGGR 机构)
Fig.3 A spatial bar mechan is m (RGGR mechan is ms)
根据图论理论,通过图论拓扑网络分析,可以得到如式(4)所示的基本回路矩阵。
第33卷第1期袁清珂等:空间机构动力学分析方法的研究
041
图4 空间四杆机构的直角坐标系Fig.4 Rectangular coordi nate syste ms for RGGR
?=
R A SB SC
RD
1111
(4)
式中,RA 、SB 、SC 、RD 分别表示A 、B 、C 、D 四点处的铰链、球铰、球铰、铰链约束运动副。
从而可以得到,用直角坐标系描述的机构运动链,如下所示。
x 1y 1z 1
运动副R A Constra i nt RA
x 2y 2z 2杆件AB L i nk AB
x 3y 3z 3
运动副SB Constraint SB
4y 4z 4
机架Base
杆件BC Link BC
x 8y 8z 8
运动副RD Constra i nt RD
x 7y 7z 7
杆件C D L i nk C D
x 6y 6z 6
运动副SC Constra i nt SC
5y 5z 5
引入杆件形状矩阵和约束变换矩阵后,上述运动链可进一步表示为
R A (q R A )T A B SB (q SB )T BC SC (q SC )T CD R D (q R D )T 机架=I
(5)
式中,I 为4?4单位矩阵,表示运动链封闭; j (q j )为运动副T j 的运动变换矩阵(j =RA 、SB 、SC 、RD),该机构中只有两种运动副,铰链和球铰副,对于铰链副,只有一个自由度,故只有一个运动变量;对于球铰副,有三个自由度,故有三个运动量。因而,q RA = A 、q R D = D ;q S B =
#B ,?B ,%B 、q SD =
#D ,?D ,%D ;T j k 为杆
件的运动状况矩阵,即同一构件上运动副k 处的坐标系到运动副j 处的坐标系的变换矩阵,在本例中,j k =AB 、BC 、CD 、机架。
用数值计算方法求解式(5),可得运动副的运动变量q j ;式(5)对时间求导数得速度 q i ,式(5)对时间求二阶导数得加速度#q i ,从而实现机构的运动分析。
2 动力学分析
2.1 基于哈米尔顿法的非线性动力学问题
设某一时刻,空间机构具有n 个自由度,m 个独立
变量,对应有广义坐标f k (k =1,2,?,n ),设系统的动能为T ,广义力矢量为Q k ,则
动能 T =12
f k T [M ] f k
(6)广义力
Q k =-[C ] f k
(7)
式中,
f k 为n ?1阶广义坐标的速度矢量,[M ]为n ?n
阶对称质量矩阵,[C ]为n ?n 阶对称阻尼矩阵,T
为多体机械系统的动能,Q k 为对应广义坐标f k 的广义力。系统的广义动量为
P k = T
f k
=[M ]
f k (8)
根据分析力学原理,定义哈米尔顿函数为H =12P k T [M ]-1
P k +V (f 1,f 2,?,f n )(9)
式中,V 为该时刻的系统势能。
设给定运动输入个数为s ,即机构有s 个自由度被约束,则机构自由度变为m =n -s 。因此,哈密尔顿正则方程为
H
P k = f k
H f k =
Q k - P k
(10)
式中,k =1,2,?,m 。
可以用四阶龙格 库塔(Runge Kutta)法求解方程
(10)得到初值,再用改进的四阶哈明(Hamming)预报校正法对方程(10)求积分。
2.2 基于系统特征值法的微振动问题
设空间机构在某一平衡位置作微振动,该位置的自由度为D F ,约束方程个数为S GC ,则自由广义坐标F GC =D F -S GC ,此时的微振动方程通式为[M ]*#X +[C ]* X +[K ]*X =
P (t )
(11)
式中,[M ]*
为空间机构在平衡位置时的D F ?D F 阶质
量矩阵,[C ]*为系统在平衡位置时的D F ?D F 阶阻尼矩阵,[K ]*为系统在平衡位置时的D F ?D F 阶刚度矩阵,P (t )为系统在平衡位置时的D F ?1阶广义力。X 、 X 、#X 分别为系统在平衡位置的D F ?1阶微振动位移、速度和加速度矢量。
方程(11)的传递函数和频率响应常常通过求方程(11)的特征解得到。
设Y = X ,则方程(11)可以化简为
A Z +BZ =P
(12)
其中,A =[0][M ]*[M ]*
[C ]*
B =
[-M ]*
[0][0]
[K ]*
P =
0 P (t )T
, Z = Y X T
,Z =Y X T
因此,方程(11)的特征解计算转化为方程(12)的
特征解的计算。可以用QR 法(Q 代表正交矩阵,R 代表
上三角矩阵)计算矩阵的特征值。求出的特征值为复数,其实部为阻尼比,而虚部为固有频率。
3 软件开发与应用实例
3.1 通用分析软件的设计与开发
042机 械 强 度2011年
基于上述理论研究,开发机械系统运动学动力学分析软件MSKDA(mechanical system kinematics &dynamics analysis),识别机构的结构形态自动求解机构运动链,自动建立机构运动学 动力学方程,并输出求解结果。3.2 应用实例
选择文献[11]
111 112
中的例5.4.2为算例(如图5所
示)验证本文所提出的方法。图5a 中AB 为一均匀细长杆件,长度为b 、质量为m ,弹簧的刚度系数为k ,当 =30%时,弹簧不变形(为其自由长度)。已知数值b = 1.8m,k =1
6
N mm 和mg =250N 。在初始角 =30%时释放曲柄AB (无初速度),试分析该系统此后的运动情况。
这个问题可以转化为图5b 所示的曲柄滑块机构(加有螺旋弹簧、不记连杆BD 和滑块的质量)。应用MSKDA 软件分析这一问题过程是,在机构中各运动副处建立直角坐标系,并用该软件提供的MSKDA 语言描述机构,软件将自动求解运动链、建立运动学、动力学方程,并求解输出结果,曲柄AB 的转动角速度随转角的变化关系如图6
所示。
图5 曲柄滑块机构Fig.5 A crank slider mechanis
m
图6 曲柄AB 角速度随其转角的变化关系Fig.6 The relations h ip between angular velocity and
angle of crank AB
由图6可以看出,机构在平衡位置为 =- 2.293%、角度为-47.9649%至30%之间作周期性的重
复摆动,文献[11]153 154
中求解的平衡位置也是 =-2%、角度为-47.9537%至30%之间作周期性的重复摆动。图7中机构运动的最大角速度为112% s,而文献
[11]155
中的计算结果是1.95rad s =
1.95
2&?360=
111.78% s 。本文求解的结果和整个运动规律均与文献
[11]
155
中的计算结果一致。
4 结论
本文通过在空间机构中约束运动副处的杆件上分别建立直角坐标系,该处两坐标系的关系描述约束运动情况,这一关系在运动过程中是不断变化的;同一杆件上的两个坐标系之间的关系,描述杆件的结构形状,这一关系在运动过程中是不变的。引入图论知识到空间机构的运动分析,实现机构运动链的自动识别与建立,在封闭运动链上连续使用上述坐标系的变换,建立空间机构的运动方程,分析空间机构动力学的建模与求解方法,在此基础上开发通用分析软件,通过工程实例,验证本文所述理论与方法的正确性,该软件已初步实现了商品化,并在实践中得到很好的应用。
参考文献(References )
[1] Bi Z M,Zhang W J,Chen I M ,Lang S Y T.Automated generation of
the D H parameters for configuration design of modular mani pulators[J ].Robotics and Computer Integrated M anufacturi ng,2007,23(5):553 562(In Chinese).[2]
王存堂,周天悦.基于D H 矩阵的径向柱塞泵的运动学分析[J].拖拉机与农用运输车,2008,35(3):74 76.
WANG CunTang,Z HO U TianYue.Kinematic analysis of radial pis ton pump based on D H matri x [J].Tractor &Farm Transporter,2008,35(3):74 76(In Chinese).
[3] 朱拥勇,王德石.基于封闭矩阵方程的空间摆盘机构运动学分
析[J].机械设计,2006,23(2):57 59.
ZHU YongYong,WANG DeShi.Dyna mics anal ysis of spati al swingi ng plate mechanism bas ed on closed matrix equation[J].J ournal of Machi ne Design,2006,23(2):57 59(In Chines e).[4]
Marc Arsenaul t,Cle &ment M Goss elin.Ki nematic,static and dyna mic analys is of a planar 2 D OF tensegrity mechanis m [J].Mechanis m and Machine Theory,2006,41:1072 1089.
[5] YANG Ji ngZhou,Karim Abdel Malek.Design propagation in kinematics
of mechanical s ys tems [J].Mechanis m and M achine Theory,2007,42:807 824.
[6] YAO Qing,DONG J ingYan,Placid M.Ferreira.A novel parallel ki ne
matics mechanis m for integrated,multi axis nanopositioning Part 1.Ki ne matics and design for fabrication [J].Precis ion Engi neering,2008,32:7 19.
[7] DONG JingYan,YAO Qing,Placi d M.Ferreira.A novel parallel ki ne
matics mechanism for inte grated,multi axis nanoposi tioni ng Part 2:Dy
第33卷第1期袁清珂等:空间机构动力学分析方法的研究043
namics,control and performance anal ysis[J].Precision Engineeri ng, 2008,32:20 33.
[8] 王志华,张伟伟,赵勇刚,等.利用传递矩阵法对阶梯悬臂梁的
裂纹参数识别[J].机械强度,2006,28(5):674 679.
WA NG Zhi Hua,Z HANG Wei Wei,ZHAO YongGang,et al.Identifica tion of crack parameters i n a stepped cantilever beam using transfer matrix method[J].Journal of Mechanical Strength,2006,28(5):674 679(In Chinese).
[9] 李万祥,何 玮,张 慧.复杂约束机械系统的动力学研究[J].
机械强度,2008,30(1):11 14.
LI WanXiang,HE Wei,Z HANG Hui.Research on dyna mics of machi ne system wi th co mplicated res triction[J].J ournal of Mechanical Strength,
2008,30(1):11 14(In Chi nese).
[10] 孙红霞,邢 普,仪垂杰.机构动力学计算机辅助分析方法的比
较[J].微计算机信息,2008,24(1 1):252 254.
SUN HongXia,XING Pu,YI https://www.doczj.com/doc/d22022973.html,parison between dyna mic
anal ysis methods of mechanism[J].Microcomputer Information,2008,
24(1 1):252 254(In Chinese).
[11] 保 罗.机构运动学与动力学[M].上海:上海科学技术出版
社,1990:111 112;1990:153 157.
BAO Luo.Kinematics and dynamics of mechanism[M].Shanghai:
Shanghai Scientific and Technical Press,1990:111 112;1990:153 157 (In Chinese).
044机 械 强 度2011年
一、实验目的 1、掌握ArcGIS缓冲区分析、叠置分析、网络分析方法。 2、熟悉ArcGIS的空间统计、栅格计算方法。 3、综合利用矢量数据空间分析中的缓冲区分析和叠置分析解决实际问题。 4、学会用ArcGIS9 进行各种类型的最短路径分析,了解内在的运算机理。 5、熟练掌握利用ArcGIS上述空间分析功能分析和结果类似学校选址的实际应用问题的基本流程和操作过程。 二、主要实验器材(软硬件、实验数据等) 计算机硬件:lenovoideapadY460N 计算机软件:ArcGIS10.0软件 实验数据:《ArcGIS地理信息系统空间分析实验教程》随书光盘的第七章、第八章等 三、实验内容与要求 1、空间缓冲区分析。 (1)为点状、线状、面状要素建立缓冲区。 1)打开菜单“自定义”下的“自定义模式”,在对话框中选择“命令”,在“类别” 中选择“工具”,在右边的框中选择“缓冲向导”(如图 1 所示),拖动其放置 到工具栏上的空处。 图1提出“缓冲向导” 2)利用选择工具选择要进行分析的点状要素,然后点击,在“缓冲向导” 对话框设置缓冲区信息,如图2及图3所示。
图2 线状缓冲区信息设置1 图3线状缓冲区信息设置2 3)利用选择工具选择要进行分析的线状要素,然后点击,在“缓冲向导” 对话框设置缓冲区信息。 4)利用选择工具选择要进行分析的面状要素,然后点击,在“缓冲向导” 对话框设置缓冲区信息,如图4所示。 图4 面状缓冲区信息设置
2、学校选址。 要求: (1) 新学校选址需注意如下几点: 1)新学校应位于地势较平坦处; 2)新学校的建立应结合现有土地利用类型综合考虑,选择成本不高的区域; 3)新学校应该与现有娱乐设施相配套,学校距离这些设施愈近愈好; 4)新学校应避开现有学校,合理分布。 (2) 各数据层权重比为:距离娱乐设施占0.5,距离学校占0.25,土地利用类型和地势 位置因素各占0.125。 (3) 实现过程运用ArcGIS的扩展模块(Extension)中的空间分析(Spatial Analyst)部 分功能,具体包括:坡度计算、直线距离制图功能、重分类及栅格计算器等功能完 成。 (4) 最后必须给出适合新建学校的适宜地区图,并对其简要进行分析。 具体操作: (1)打开加载地图文档对话框,选择E:\Chp8\Ex1\school.mxd。 (2)从DEM 数据提取坡度数据集: 打开工具箱→“Spatial Analyst 工具”→“表面分析”→“坡度”工具;在打开对话框中设置,如图5所示;生成坡度图,如图6所示。 图5 “坡度”对话框设置 图6 坡度图
状态空间分析法的主要特点及其应用 课程:现代控制工程 教师: 学生: 班级:机电研班 学号:
状态空间分析法的主要特点及其应用 机电研班 摘要:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分。在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时域分析方法。现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统。现代控制理论还为设计和构造具有指定的性能指标的最优控制系统提供了可能性。 本文通过分析比较经典控制理论在多输入多输出方面存在的不足,阐述了现代控制理论中的一种方法——状态空间分析法。本文以线性系统的状态空间表达式为基础对状态空间分析法的特点和应用方面作了一些阐述和论证,并结合现实生活中的一些实际工程问题的分析,论证了此种方法的实用性和先进性。 关键词:现代控制;状态空间分析法;汽轮机;调节系统;动态分析 1引言 经典控制理论主要以传递函数为基础,采用复域分析方法,由此建立起来的频率特性和根轨迹等图解解析设计法,对于单输入——单输出系统极为有效,至今仍在广泛成功地使用。但传递函数只能描述线性定常系统的外部特征,并不能反映其全部内部变量变化情况,且忽略了初始条件的影响,其控制系统的设计建立在试探的基础之上,通常得不到最优控制。复域分析法对于控制过程来说是间接的。 现代控制理论由于可利用数字计算机进行分析设计和实时控制,因此可处理时变、非线性、多输入——多输出系统的问题。现代控制理论主要以状态空间法为基础,采用时域分析方法,对于控制过程来说是直接的。它一方面能使设计者针对给定的性能指标设计出最优控制系统;另一方面还可以用更一般的输入函数代替特殊的所谓“典型输入函数”来实现最优控制系统设计。随着控制系统的高性能发展,最优控制、最佳滤波、系统辨识,自适应控制等理论都是这一领域研究的主要课题。 在用状态空间法分析系统时,系统的动态特性是由状态变量构成的一阶微分方程组来描述的。已能反映系统的全部独立变量的变化,从而能同时确定系统的全部运动状态,而且可以方便地处理初始条件。
空间分析实习指导书——三维空间分析(ArcGIS 3D Analyst模块) 武汉大学遥感信息工程学院 2011年
0 实习准备 0.1 实习内容 练习一:在地形表面上叠加影像; 练习二:污染物在蓄水层中的可视化; 练习三:土壤污染及甲状腺癌发病率的可视化; 练习四:创建TIN表面表示地形。 学习三维空间分析的最佳办法就是在使用中学习。在本教程的这个练习中,您将学习: 用ArcCatalog查找、预览三维数据; 在ArcScene中添加数据; 查看数据的三维属性; 从二维要素与表面中创建新的三维要素; 从点数据源中创建新的栅格表面; 从现有要素数据中创建TIN表面。 为了能够顺利使用本教程,用户的机器上必须安装了ArcGIS及三维扩展模块3D Analyst,并且在本机或网络上安装有本教程所需要的数据.如未在教程指定的默认目录中找到练习数据,请与系统管理员联系,以获取正确的数据路径。 0.2 拷贝教程数据 首先将教程数据拷贝到本机。您将使用ArcCatalog浏览、拷贝数据。 1.点击开始->程序->ArcGIS中的ArcCatalog,如图0.1所示。 图0.1
ArcCatalog允许用户对数据进行查找与管理。ArcCatalog左边的窗口称之为“目录树”。ArcCatalog右边的窗口显示在目录树中选中数据的内容。如图0.2所示。 图0.2 2.点击location下拉列表框,输入教程数据的安装路径…\ArcGIS\ArcTutor,并回车。 此时,目录树中的ArcTutor文件夹为当前选中的项。你可以使用Contents标签显示其中的内容,如图0.3所示。 图0.3 3.右击3DAnalyst文件夹,选择“复制(Copy)”,如图0.4所示。 图0.4
平面连杆机构的运动分析和动力分析1.1 机构运动分析的任务、目的和方法 曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。 对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。还可以根据机构闭环矢量方程计算从动件的位移偏差。上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。 机构运动分析的方法很多,主要有图解法和解析法。当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。 1.2 机构的工作原理 在平面四杆机构中,其具有曲柄的条件为: a.各杆的长度应满足杆长条件,即: 最短杆长度+最长杆长度≤其余两杆长度之和。 b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。 第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm 最短杆长度+最长杆长度(125.36+73.4) ≤其余两杆长度之和(103.4+103.52) 最短杆为连架杆,四杆机构为曲柄摇杆机构 第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm 最短杆长度+最长杆长度(125.36+50.1) ≤其余两杆长度之和(109.8+72.85) 最短杆为连架杆,四杆机构为曲柄摇杆机构 第三组(3代)四杆机构L1=163.2mm,L2=61.6mm,L3=150mm,L4=90mm 最短杆长度+最长杆长度(163.2+61.6) ≤其余两杆长度之和(150+90) 最短杆为连架杆,四杆机构为曲柄摇杆机构 在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。 1.3 机构的数学模型的建立 图1机构结构简图 在用矢量法建立机构的位置方程时,需将构件用矢量来表示,并作出机构的封闭矢量多边形。如图1所示,先建立一直角坐标系。设各构件的长度分别为L1 、L2 、L3 、L4 , 其方位角为、、、。以各杆矢量组成一个封闭矢量多边形,即ABCDA。其个矢量之和必等于零。即:
ARCGIS空间分析基本操作 一、实验目的 1. 了解基于矢量数据和栅格数据基本空间分析的原理和操作。 2. 掌握矢量数据与栅格数据间的相互转换、栅格重分类(Raster Reclassify)、栅格计算-查询符合条件的栅格(Raster Calculator)、面积制表(Tabulate Area)、分区统计(Zonal Statistic)、缓冲区分析(Buffer) 、采样数据的空间内插(Interpolate)、栅格单元统计(Cell Statistic)、邻域统计(Neighborhood)等空间分析基本操作和用途。 3. 为选择合适的空间分析工具求解复杂的实际问题打下基础。 二、实验准备 预备知识: 空间数据及其表达 空间数据(也称地理数据)是地理信息系统的一个主要组成部分。空间数据是指以地球表面空间位置为参照的自然、社会和人文经济景观数据,可以是图形、图像、文字、表格和数字等。它是GIS所表达的现实世界经过模型抽象后的内容,一般通过扫描仪、键盘、光盘或其它通讯系统输入GIS。 在某一尺度下,可以用点、线、面、体来表示各类地理空间要素。 有两种基本方法来表示空间数据:一是栅格表达; 一是矢量表达。两种数据格式间可以进行转换。
空间分析 空间分析是基于地理对象的位置和形态的空间数据的分析技术,其目的在于提取空间信息或者从现有的数据派生出新的数据,是将空间数据转变为信息的过程。 空间分析是地理信息系统的主要特征。空间分析能力(特别是对空间隐含信息的提取和传输能力)是地理信息系统区别与一般信息系统的主要方面,也是评价一个地理信息系统的主要指标。 空间分析赖以进行的基础是地理空间数据库。 空间分析运用的手段包括各种几何的逻辑运算、数理统计分析,代数运算等数学手段。 空间分析可以基于矢量数据或栅格数据进行,具体是情况要根据实际需要确定。 空间分析步骤 根据要进行的空间分析类型的不同,空间分析的步骤会有所不同。通常,所有的空间分析都涉及以下的基本步骤,具体在某个分析中,可以作相应的变化。 空间分析的基本步骤: a)确定问题并建立分析的目标和要满足的条件 b)针对空间问题选择合适的分析工具 c)准备空间操作中要用到的数据。 d)定制一个分析计划然后执行分析操作。 e)显示并评价分析结果
第九章三维分析 相当长的一段时间里,由于GIS理论方法及计算机软硬件技术所限,GIS以描述二维空间为主,同时发展了较为成熟的基于二维空间信息的分析方法。但是将三维事物以二维的方式来表示,具有很大的局限性。在以二维方式描述一些三维的自然现象时,不能精确地反映、分析和显示有关信息,致使大量的三维甚至多维空间信息无法加以充分利用。随着GIS技术以及计算机软硬件技术的进一步发展,三维空间分析技术逐步走向成熟。三维空间分析相比二维分析,更注重对第三维信息的分析。其中第三维信息不只是地形高程信息,已经逐步扩展到其它更多研究领域,如降雨量、气温等。 ArcGIS具有一个能为三维可视化、三维分析以及表面生成提供高级分析功能的扩展模块3D Analyst,可以用它来创建动态三维模型和交互式地图,从而更好地实现地理数据的可视化和分析处理。 利用三维分析扩展模块可以进行三维视线分析和创建表面模型(如TIN)。任何ArcGIS 的标准数据格式,不论二维数据还是三维数据都可通过属性值以三维形式来显示。例如,可以把平面二维图形突出显示成三维结构、线生成墙、点生成线。因此,不用创建新的数据就可以建立高度交互性和可操作性的场景。如果是具有三维坐标的数据,利用该模块可以把数据准确地放置在三维空间中。 ArcScene是ArcGIS三维分析模块3D Analyst所提供的一个三维场景工具,它可以更加高效地管理三维GIS数据、进行三维分析、创建三维要素以及建立具有三维场景属性的图层。 此外,还可以利用ArcGlobe模型从全球的角度显示数据,无缝、快速地得到无限量的虚拟地理信息。ArcGlobe能够智能化地处理栅格、矢量和地形数据集,从区域尺度到全球尺度来显示数据,超越了传统的二维制图。 利用交互式制图工具,可以在任何比例尺下进行数据筛选、查询和分析,或者把比例尺放大到合适的程度来显示感兴趣区域的高分辨率空间数据,例如航空相片的细节。 本章主要介绍如何利用ArcGIS三维分析模块进行创建表面、进行各种表面分析及在ArcScene中数据的三维可视化。此外,还包括数据转换的介绍,包括二维要素三维化、将栅格数据转换为矢量数据以及将TIN表面数据转换为矢量要素数据。最后,设计了多个实例与练习以帮助读者掌握常用的ArcGIS三维分析的理论与方法。 9.1 创建表面 具有空间连续特征的地理要素,其值的表示可以借鉴三维坐标系统X、Y、Z中的Z 值来表示,一般通称为Z值。在一定范围内的连续Z值构成了连续的表面。由于表面实际上包含了无数个点,在应用中不可能对所有点进行度量并记录。表面模型通过对区域内不
第9章 线性系统的状态空间分析与综合 重点与难点 一、基本概念 1.线性系统的状态空间描述 (1)状态空间概念 状态 反映系统运动状况,并可用以确定系统未来行为的信息集合。 状态变量 确定系统状态的一组独立(数目最少)变量,它对于确定系统的运动状态是必需的,也是充分的。 状态向量 以状态变量为元素构成的向量。 状态空间 以状态变量为坐标所张成的空间。系统某时刻的状态可用状态空间上的点来表示。 状态方程 状态变量的一阶导数与状态变量、输入变量之间的数学关系,一般是关于系统的一阶微分(或差分)方程组。 输出方程 输出变量与状态变量、输入变量之间的数学关系。 状态方程与输出方程合称为状态空间描述或状态空间表达式。线性定常系统状态空间表达式一般用矩阵形式表示: ???+=+=Du Cx y Bu Ax x & (9.1) (2)状态空间表达式的建立。系统状态空间表达式可以由系统微分方程、结构图、传递函数等其他形式的数学模型导出。 (3)状态空间表达式的线性变换及规范化。描述某一系统的状态变量个数(维数)是确定的,但状态变量的选择并不唯一。某一状态向量经任意满秩线性变换后,仍可作为状态向量来描述系统。状态变量选择不同,状态空间表达式形式也不一样。利用线性变换的目的在于使系统矩阵A 规范化,以便于揭示系统特性,利于分析计算。满秩线性变换不改变系统的固有特性。 根据矩阵A 的特征根及相应的独立特征向量情况,可将矩阵A 化为三种规范形式:对角形、约当形和模式矩阵。 (4)线性定常系统状态方程解。状态转移矩阵)(t φ(即矩阵指数At e )及其性质:
i . I =)0(φ ii .A t t A t )()()(φφφ ==& iii. )()()()()(122121t t t t t t φφφφφ±=±=+ iv. )()(1 t t -=-φφ v. )()]([kt t k φφ= vi. )( ])exp[()exp()exp(BA AB t B A Bt At =+= vii. )( )ex p()ex p(11非奇异P P At P APt P --= 求状态转移矩阵)(t φ的常用方法: 拉氏变换法 =)(t φL -1])[(1--A sI (9.2) 级数展开法 ΛΛ++++ +=k k At t A k t A At I e ! 12122 (9.3) 齐次状态方程求解 )0()()(x t t x φ= (9.4) 非齐次状态方程式(9.1)求解 ?-+=t Bu t x t t x 0d )()()0()()(τττφφ (9.5) (5)传递函数矩阵及其实现 传递函数矩阵)(s G :输出向量拉氏变换式与输入向量拉氏变换式之间的传递关系 D B A sI C s G +-=-1)()( (9.6) 传递函数矩阵的实现:已知传递函数矩阵)(s G ,找一个系统},,,{D C B A 使式(9.6)成立,则将系统},,,{D C B A 称为)(s G 的一个实现。当系统阶数等于传递函数矩阵阶数时,称该系统为)(s G 的最小实现。 传递函数矩阵的实现并不唯一。实现的常用标准形式有可控标准形实现、可观测标准形实现、对角形实现和约当形实现等。 (6)线性定常连续系统的离散化及其求解 对式(9.1)表示的线性定常数连续系统进行离散化,导出的系统离散状态空间描述
空间分析实习报告 学院遥感信息工程学院班级 学号 姓名 日期
一、实习内容简介 1.实验目的: (1)通过实习了解ArcGIS的发展,以及10.1系列软件的构成体系 (2)熟练掌握ArcMap的基本操作及应用 (3)了解及应用ArcGIS的分析功能模块ArcToolbox (4)加深对地理信息系统的了解 2.实验内容: 首先是对ArcGIS有初步的了解。了解ArcGIS的发展,以及10.1系列软件的构成体系,了解桌面产品部分ArcMap、ArcCatalog和ArcToolbox的相关基础知识。 实习一是栅格数据空间分析,ArcGIS软件的Spatial Analyst模块提供了强大的空间分析工具,可以帮助用户解决各种空间分析问题。利用老师所给的数据可以创建数据(如山体阴影),识别数据集之间的空间关系,确定适宜地址,最后寻找一个区域的最佳路径。 实习二是矢量数据空间分析,ArcToolbox软件中的Analysis Tools和Network Analyst Tools提供了强大的矢量数据处理与分析工具,可以帮助用户解决各种空间分析问题。利用老师所给的数据可以通过缓冲区分析得到矢量面数据,通过与其它矢量数据的叠置分析、临近分析来辅助选址决策过程;可以构建道路平面网络模型,进而通过网络分析探索最优路径,从而服务于公交选线、智能导航等领域。 实习三是三维空间分析,学会用ArcCatalog查找、预览三维数据;在ArcScene中添加数据;查看数据的三维属性;从二维要素与表面中创建新的三维要素;从点数据源中创建新的栅格表面;从现有要素数据中创建TIN表面。 实习四是空间数据统计分析,利用地统计分析模块,你可以根据一个点要素层中已测定采样点、栅格层或者利用多边形质心,轻而易举地生成一个连续表面。这些采样点的值可以是海拔高度、地下水位的深度或者污染值的浓度等。当与ArcMap一起使用时,地统计分析模块提供了一整套创建表面的工具,这些表面能够用来可视化、分析及理解各种空间现象。 实习五是空间分析建模,空间分析建模就是运用GIS空间分析方法建立数学模型的过程。按照建模的目的,可分为以特征为主的描述模型(descriptive model)和提供辅助决策信息和解决方案为目的的过程模型(process model)两类。本次实习主要是通过使用ArcGIS的模型生成器(Model Builder)来建立模型,从而处理涉及到许多步骤的空间分析问题。 二、实习成果及分析 实习一: 练习1:显示和浏览空间数据。利用ArcMap和空间分析模块显示和浏览数据。添加和显示各类空间数据集、在地图上高亮显示数值、查询指定位置的属性值、分析一张直方图和创建一幅山体阴影图。
1 动力学分析方法 结构动力学的研究方法可分为分析方法(结构动力分析)和试验方法(结构动力试验)两大类。[7-10] 分析方法的主要任务是建模(modeling),建模的过程是对问题的去粗取精、去伪存真的过程。在结构动力学中,着重研究力学模型(物理模型)和数学模型。建模方法很多,一般可分为正问题建模方法和反问题建模方法。正问题建模方法所建立的模型称为分析模型(或机理模型)。因为在正问题中,对所研究的结构(系统)有足够的了解,这种系统成为白箱系统。我们可以把一个实际系统分为若干个元素或元件(element),对每个元素或元件直接应用力学原理建立方程(如平衡方程、本构方程、汉密尔顿原理等),再考虑几何约束条件综合建立系统的数学模型。如果所取的元素是一无限小的单元,则建立的是连续模型;如果是有限的单元或元件,则建立的是离散模型。这是传统的建模方法,也称为理论建模方法。反问题建模方法适用于对系统了解(称黑箱系统——black box system)或不完全了解(称灰箱系统——grey box system)的情况,它必须对系统进行动力学实验,利用系统的输入(载荷)和输出(响应——response)数据,然后根据一定的准则建立系统的数学模型,这种方法称为试验建模方法,所建立的模型称为统计模型。 在动力平衡方程中,为了方便起见一般将惯性力一项隔离出来,单独列出,因此通常表达式为: +P M (2) u I - = 其中M为质量矩阵,通常是一个不随时间改变的产量;I和P是与位移和速度有关的向量,而与对时间的更高阶导数无关。因此系统是一个关于时间二级导数的平衡系统,而阻尼和耗能的影响将在I和P中体现。可以定义: + = (3) I Ku C u 如果其中的刚度矩阵K和阻尼矩阵C为常数,系统的求解将是一个线性的问题;否则将需要求解非线性系统。可见线性动力问题的前提是假设I是与节点位移和速度是线性相关的。 将公式(2)代入(1)中,则有 (4) + M= + u P Ku C u
地理信息系统(GIS)具有很强的空间信息分析功能,这是区别于计算机地图制图系统的显著特征之一。利用空间信息分析技术,通过对原始数据模型的观察和实验,用户可以获得新的经验和知识,并以此作为空间行为的决策依据。 空间信息分析的内涵极为丰富。作为GIS的核心部分之一,空间信息分析在地理数据的应用中发挥着举足轻重的作用。 叠置分析(Overlay Analysis) 覆盖叠置分析是将两层或多层地图要素进行叠加产生一个新要素层的操作,其结果将原来要素分割生成新的要素,新要素综合了原来两层或多层要素所具有的属性。也就是说,覆盖叠置分析不仅生成了新的空间关系,还将输入数据层的属性联系起来产生了新的属性关系。覆盖叠置分析是对新要素的属性按一定的数学模型进行计算分析,进而产生用户需要的结果或回答用户提出的问题。 1)多边形叠置 这个过程是将两层中的多边形要素叠加,产生输出层中的新多边形要素,同时它们的属性也将联系起来,以满足建立分析模型的需要。一般GIS软件都提供了三种多边形叠置: (1)多边形之和(UNION):输出保留了两个输入的所有多边形。 (2)多边形之积(INTERSECT):输出保留了两个输入的共同覆盖区域。 (3)多边形叠合(IDENTITY):以一个输入的边界为准,而将另一个多边形与之相匹配,输出内容是第一个多边形区域内二个输入层所有多边形。 多边形叠置是个非常有用的分析功能,例如,人口普查区和校区图叠加,结果表示了每一学校及其对应的普查区,由此就可以查到作为校区新属性的重叠普查区的人口数。 2)点与多边形叠加 点与多边形叠加,实质是计算包含关系。叠加的结果是为每点产生一个新的属性。例如,井位与规划区叠加,可找到包含每个井的区域。 3)线与多边形叠加 将多边形要素层叠加到一个弧段层上,以确定每条弧段(全部或部分)落在哪个多边形内。 网络分析(Network Analysis) 对地理网络(如交通网络)、城市基础设施网络(如各种网线、电力线、电话线、供排水管线等)进行地理分析和模型化,是地理信息系统中网络分析功能的主要目的。网络分析是运筹学模型中的一个基本模型,它的根本目的是研究、筹划一项网络工程如何按排,并使其运行效果最好,如一定资源的最佳分配,从一地到另一地的运输费用最低等。其基本思想则在于人类
状态空间法分析及其应用的特点 摘要 基于为寻求便于分析系统的性能的相应状态变量以及探究状态空间变量线性变换对系统性能的影响,来阐述状态空间分析法的特点。通过应用状态空间法到绞线一叠层橡胶复合支座隔震结构进行数值模拟分析中来进一步阐述其特点,将结构控制理论中的结构状态空间法应用到该复合支座隔震结构的数值模拟分析中。建立了普通框架、安装叠层橡胶支座和安装绞线一叠层橡胶复合支座框架的结构状态方程,应用MATLAB/SIMULINK工具箱建立结构仿真模型,得出不同条件下框架结构的时程反应曲线。通过对比分析可以看出绞线一叠层橡胶复合支座能很好地改变结构的隔震效果,应用状态空间法进行绞线一叠层橡胶复合支座隔震结构的数值模拟分析简单准确。 关键词:系统、传递函数、线性变换、状态空间变量
一、引言 状态空间分析从实质上说并不是什么新颖的东西,其关键思想起源予19世纪到拉格朗日、哈密顿等人在研究经典力学时提出的广义坐标与变分法。当然,由高斯等人奠定的古典概率、估计理论以及线性代数等也具有同样的重要性。上世纪40年代以来,布利斯、庞德里亚金和别尔曼关于极大值原理,卡尔曼、布西与巴丁等人提出的卡尔曼滤波理论,以及许许多多的学者完成的并不具有里程碑意义的研究成果,积累起来却对算法及分析结果产生了决定性意义的贡献。这些便是状态空间方法发展的历史概况。状态空间分析是对线性代数、微分方程、数值方法、变分法、随机过程以及控制理论等应用数学各学科的综台。对动态系统的性能分析,特别是对扰动的响应、稳定性的特性、估计与误差分析以及对控制律的设计及性能评估,这些便构成状态空间分析的内容。这主要表现在利用向量、矩阵等一整套数学符合,把大量资料加以整理与综合,形成了观念上统一的体系——60年代中期之后出现了现代控制理论。 状态空间分析随着动力学与控制问题维数的增加(其中包括坐标、敏感器、执行机构以及其它装置的数量)而越发显得重要。另一方面亦由于计算机软件的不断完善,特别在可靠性及用户接口方面的改善与进展,使得计算工作比以前任何时候都易于进行,使状态空间分析越发显得有生命力。它具有的特性使得在设计控制系统时,不在只局限于输入量、输出量和误差量,为提高系统性能提供了有力的工具,加之可以利用计算机进行分析设计及实时控制,因而可以应用于非线性系统、时变系统、多输入—多输出系统以及随机过程等。
空间分析的概念空间分析:是基于地理对象的位置和形态特征的空间数据分析技术,其目的在于提取和传输空间信息。包括空间数据操作、空间数据分析、空间统计分析、空间建模。 空间数据的类型空间点数据、空间线数据、空间面数据、地统计数据 属性数据的类型名义量、次序量、间隔量、比率量 属性:与空间数据库中一个独立对象(记录)关联的数据项。属性已成为描述一个位置任何可记录特征或性质的术语。 空间统计分析陷阱1)空间自相关:“地理学第一定律”—任何事物都是空间相关的,距离近的空间相关性大。空间自相关破坏了经典统计当中的样本独立性假设。避免空间自相关所用的方法称为空间回归模型。2)可变面元问题MAUP:随面积单元定义的不同而变化的问题,就是可变面元问题。其类型分为:①尺度效应:当空间数据经聚合而改变其单元面积的大小、形状和方向时,分析结果也随之变化的现象。②区划效应:给定尺度下不同的单元组合方式导致分析结果产生变化的现象。3)边界效应:边界效应指分析中由于实体向一个或多个边界近似时出现的误差。 生态谬误在同一粒度或聚合水平上,由于聚合方式的不同或划区方案的不同导致的分析结果的变化。(给定尺度下不同的单元组合方式) 空间数据的性质空间数据与一般的属性数据相比具有特殊的性质如空间相关性,空间异质性,以及有尺度变化等引起的MAUP效应等。一阶效应:大尺度的趋势,描述某个参数的总体变化性;二阶效应:局部效应,描述空间上邻近位置上的数值相互趋同的倾向。 空间依赖性:空间上距离相近的地理事物的相似性比距离远的事物的相似性大。 空间异质性:也叫空间非稳定性,意味着功能形式和参数在所研究的区域的不同地方是不一样的,但是在区域的局部,其变化是一致的。 ESDA是在一组数据中寻求重要信息的过程,利用EDA技术,分析人员无须借助于先验理论或假设,直接探索隐藏在数据中的关系、模式和趋势等,获得对问题的理解和相关知识。常见EDA方法:直方图、茎叶图、箱线图、散点图、平行坐标图 主题地图的数据分类问题等间隔分类;分位数分类:自然分割分类。 空间点模式:根据地理实体或者时间的空间位置研究其分布模式的方法。 茎叶图:单变量、小数据集数据分布的图示方法。 优点是容易制作,让阅览者能很快抓住变量分布形状。缺点是无法指定图形组距,对大型资料不适用。 茎叶图制作方法:①选择适当的数字为茎,通常是起首数字,茎之间的间距相等;②每列标出所有可能叶的数字,叶子按数值大小依次排列;③由第一行数据,在对应的茎之列,顺序记录茎后的一位数字为叶,直到最后一行数据,需排列整齐(叶之间的间隔相等)。 箱线图&五数总结 箱线图也称箱须图需要五个数,称为五数总结:①最小值②下四分位数:Q1③中位数④上四分位数:Q3⑤最大值。分位数差:IQR = Q3 - Q1 3密度估计是一个随机变量概率密度函数的非参数方法。 应用不同带宽生成的100个服从正态分布随机数的核密度估计。 空间点模式:一般来说,点模式分析可以用来描述任何类型的事件数据。因为每一事件都可以抽象化为空间上的一个位置点。 空间模式的三种基本分布:1)随机分布:任何一点在任何一个位置发生的概率相同,某点的存在不影响其它点的分布。又称泊松分布 2)均匀分布:个体间保持一定的距离,每一个点尽量地远离其周围的邻近点。在单位(样方)
同批工件间同时到达的耦合关系? 工件本来是一个个到达,如C-C+1-C+2,但考虑为批次同时到达,C 可以直接到C+2; 基于更新过程的关键更新定理,将小车与B2、B4间的耦合关系用节点间的批量到达速率、批量离开速率变化替代?B2的输出与B4的输入之间相互依赖 节点二: 两次小车装载之间通常会有多个工件到达B2,在小车两次到达的间隔中B2内的工件数量曲线是单调非减的。因此,实际上小车回到B2时B2拥有的工件数量的期望(锯齿的上尖点)远远比稳态后(稳态后不变,中间水平线)计算的期望要大 节点四: 实际上小车来到B4时B4拥有的工件数量的期望远远比稳态后计算的期望要小,当小车容量C 越大、小车速度越慢(保持当量运载能力不变)的时候这个偏差越明显,这样将提高小车由于阻塞停留在B4处的计算概率(实际堵塞概率比计算值要小),降低前环节的处理能力。 平均在制品数量: ()()()() ()121112223331122334444444441112123 ,,,01 01 11 11C 4,,201 1 WIP=; N N C S w b S w b S w b b w b w b w N i S w b S w b w w P w P w P w P w P N +======+===?+?+?+?+?∑∑∑∑∑∑∑ ∑∑ 第4项改为乘以W4;第五项(节点四在制品数期望)就是小车阻塞的概率乘以节点4的个数 (N4+1) 状态之间的转换速率:存在概率路径,则用概率路径乘以速率,不存在概率路径,则直接用速率。实际上概率路径之和一定=1 1 i b =-0 i b =1 i b =2 i b = B2 B4 节点3:2C+2个状态对应2C+2个方程 右边第一项:上标为W3,漏了V ,第二项是只可能是从小车上只有一个变为空车返回状态
状态空间分析法的主要特点及其应用 1.引言 60年代以前,研究自动控制系统的传统方法 主要使用传递函数作为系统的数学描述,研究对象是 SISO 系统,这样建立起来的理论就是现在所说的“古典控制理论”。随着宇航和生产技术的发展及电子计算机的出现,控制系统日渐复杂(MIMO ,时变,不确定,耦合,大规模),传统的研究方法难以适应新的形势。在 50s'后期,Bellman 等人提议使用状态变量法,即状态空间法来描述系统,时至今日,这种方法已成为现代控制理论的基本模型和数学工具。 所谓状态空间是指以状态变量n 21X X X ,为轴所构成的n 维向量空间。这样,系统的任意状态都可以用状态空间中的一个点表示。利用状态空间的观点分析系统的方法称为状态空间法,状态空间法的实质不过是将系统的运动方程写成一阶微分方程组,这在力学和电工上早已使用,并非什么新方法,但用来研究控制系统时具有如下优点。 1、适用面广:适用于 MIMO 、时变、非线性、随机、采样等各种各样的系统,而经典法主要适用于线性定常的 SISO 系统。 2、 简化描述,便于计算机处理:可将一阶微分方程组写成向量矩阵方程, 因而简化数学符号,方便推导,并很适合于计算机的处理,而古典法是拉氏变换法,用计算机不太好处理。 3、内部描述:不仅清楚表明 I-O 关系,还精确揭示了系统内部有关变量及初始条件同输出的关系。 4、有助于采用现代化的控制方法 :如自适应控制、最优控制等。 上述优点便使现代控制理论获得了广泛应用,尤其在空间技术方面还有极大成功。 状态空间法的缺点: 1、不直观,几何、物理意义不明显:不象经典法那样, 能用 Bode 图及根轨迹进行直观的描述。对于简单问题,显得有点烦琐。 2、对数学模型要求很高:而实际中往往难以获得高精度的模型,这妨碍了它的推广和应用。。 2.状态空间分析法在部分系统中的应用 2.1状态空间分析法在PWM 系统中的应用 状态空间分析法不仅适用于时变系统(例如PWM 系统),而且可以将其简化,同时便于计算机处理。 在许多控制系统中,包括直流和交流电源系统,采用了脉冲宽度调制(卫WM)方式。可用于计算机和重要负荷的UPS(不停电供电电源),采用PWM ,除对输出电压进行调节外,还可通过合理选择每周期脉冲数,消除指定的高次谐波,并可加快系统的动态响应速度。在对DC 一Dc 变换器等只具有正脉冲调制的系统分析中,如满足一定条件,则可运用状态空间平均值法。对交变的PWM 系统,每周期系统状态变化较大,有的变量正负值交替变化,因而不能运用平均值法分析,故采用状态空间分析方法。 PWM 系统通常均含开关器件,不同的脉冲间隔对应于开关器件的不同状态,即器件的导通或开断。开关状态的变化引起系统结构或参数的变化,则描述系统运动过程的状态方程也相应改变。
三维空间分析实习报告 (ArcGIS 3D Analyst模块) 一、实习内容简介 在本次实习中,我利用ArcGIS Desktop软件,主要完成四个任务: 1.在地形表面上叠加影像。 2.污染物在蓄水层中的可视化。 3.土壤污染及甲状腺癌发病率的可视化。 4.创建TIN表示地形。 通过四个具体的实习案例,学习如何在ArcCatalog中查找预览三维数据,在ArcScene 中添加并浏览数据,查看数据的三维属性,从二维要素与表面中创建新的三维要素,从点数据源中创建新的栅格表面,从现有的要素数据中创建TIN表面并进行视场分析。 二、实习成果及分析 2.1.在地形表面上叠加影像 将影像数据叠加至三维数据的结果如图1(高程值拉伸为原来的2倍)。 图1在地形表面上叠加影像 将影像叠加到地形表面后,不仅能够看到影像本身的信息,同时也能够看到每一个像素点所在高程信息,这可以为影像判读人员提供更加丰富的信息,提高判读的准确性并且发现影像地图上不存在的信息。 2.2.污染物在蓄水层中的可视化 在本练习中,根据二维要素的属性值,对二维要素进行挤出操作,生成三维要素,如根据水井点要素的深度属性,生成以直线表示的水井三维要素,直观的反应水井的分布和深度情况,根据公共设施的重要程度,将公共要素的面状要素生成三维体要素,直观的反应出公共设施的重要程度。场景显示出污染的形状及强度、水井与污染物空间的关系,以及为阻止地下水进一步污染而需要进行清理的设施(如图2) 2.3.土壤污染及甲状腺癌发病率的可视化 在本练习中,同样根据二维要素的属性值对二维要素进行挤出操作,生成三维要素,表示某一地区甲状腺癌的发病率的多少;同时使用反距离加权内插的方法,根据采样点的土壤中污染物浓度,生成连续的整个地区的污染物浓度栅格表面,用来可视化(如图3)。
空间机构动力学分析方法的研究 RESEARCH OF SPATIAL MECHANISM DYNAMICS ANALYSIS METHODS 袁清珂 1 刘大慧1 惠延波2 张明天1 成思源 1 (1.广东工业大学机电工程学院,广州510006) (2.河南工业大学机电工程学院,郑州450007) YU AN QingKe 1 LIU DaHui 1 HUI YanBo 2 ZHANG MingTian 1 CHENG SiYuan 1 (1.College o f Mechanical &Electrical Engineering ,Guangdong University o f Technology ,Guangzhou 510006,China ) (2.College o f Mechanical Engineering ,Henan University o f Technology ,Zhengzhou 450007,China ) 摘要 在空间机构中约束运动副处的构件上建立笛卡尔直角坐标系,开发描述空间机构结构形态的符号体系,讨论杆件形状矩阵和约束运动矩阵,在运动链上连续使用变换矩阵,建立空间机构的运动方程,分析空间机构二种类型的动力学建模与分析方法,在此基础上开发空间机构动力学通用分析软件,并给出应用实例。 关键词 空间机构 机械学 运动学 动力学 数值方法 软件工程中图分类号 TH112 TH113 Abstract Cartesian coordinate sys tems were built on the two links at a cons train t kinematics pair respectively,so a notation set to describing spatial mechanis ms was established.Link shape matrices and constraint motion matrices were discussed.By in series usin g these transform matrices on a kinematics chain,the motion equations of spatial mechanisms were set up.The modeling and analyzin g methods for two kinds of spatial mechanis m dynamics problems were explored.Based on the above research,the general analysis software spatial mechanisms dynamics were developed,an example was given. Key words Spatial mechanism ;Mechanics ;Kinem atics ;Dynamics ;Numerical methods ;Software eng ineering Correspon ding author :YUAN Qing Ke ,E mail :qkyuan @gdut .edu .cn The project supported by the National Natural Science Foundation of Chi na (No.50805025),and Guangdong Technological Plans Projects (No.2008B010400011),and Guangzhou T echnological Plans Projects (No.2008Z1 D371). Manuscript received 20080821,in revi sed form 20090307. 引言 研制开发通用机构计算机自动分析软件,首先遇到的问题是如何以一种适当的计算机能够理解的 方式来描述机构的结构形态,使计算机能够自动识别机构、自动建立机构的运动方程、自动求解运动方程,并以数字和图形的方式输出结果。目前,常用的方法是基于机构分组的方法,通过数据文件表达机构的结构形态,这种方法存在描述机构范围有限和用户使用不便等不足。要实现机构分析软件的真正通用化和自动化,必须建立描述机构的通用方法和语言。通过通用方法和专用语言描述各种机构,计算机能识别这种描述,并且能通过这种描述自动识别机构的结构形态和运动链,自动建立机构运动方程,自动进行求解并输出结果。 本文在Denavit 和Hartenberg 提出的用于描述低副机构的描述方法(Denavit Hartenberg,D H )[1 2] 的基础 上,结合有关分析方法 [3 9] ,提出一种新的空间机构运 动建模与分析方法。在空间机构中约束运动副处的构件上建立笛卡尔直角坐标系,开发描述空间机构结构形态的符号体系,讨论杆件形状矩阵和约束运动矩阵,在运动链上连续变换矩阵,建立空间机构的运动方程,分析空间机构两种类型的动力学建模与分析方法,在此基础上,开发通用分析软件,并给出应用实例。 1 运动方程的建立 1.1 坐标系的建立 在空间机构中每一运动副处,分别在构成该运动副的两个构件上,根据运动副的性质和特征,按照不同的规律建立固结于构件上的直角坐标系, 在机构运动 Journal of Mechanical Strength 2011,33(1):040 044 袁清珂,男,1963年1月生,山东青岛人,汉族。广东工业大学教授,从事知识工程与智能设计、机电控制、多体动力学与计算机仿真、企业 信息化、电子商务与网络化制造的研究。 20080821收到初稿,20090307收到修改稿。国家自然科学基金(50805025)、广东省教育部产学研结合项目(2009B090300340)、广东省科技计划 (2008B010400011)、广州市科技计划(2008Z1 D371)资助。