%
第二章 插床主体机构尺寸综合设计
机构简图如下:
已知21O O =150mm ,1/2 BO BC ,行程H=100mm ,行程比系数K=2,
根据以上信息确定曲柄,1A O 2,BO BC 长度,以及2O 到YY 轴的距离 1.A O 1长度的确定
/
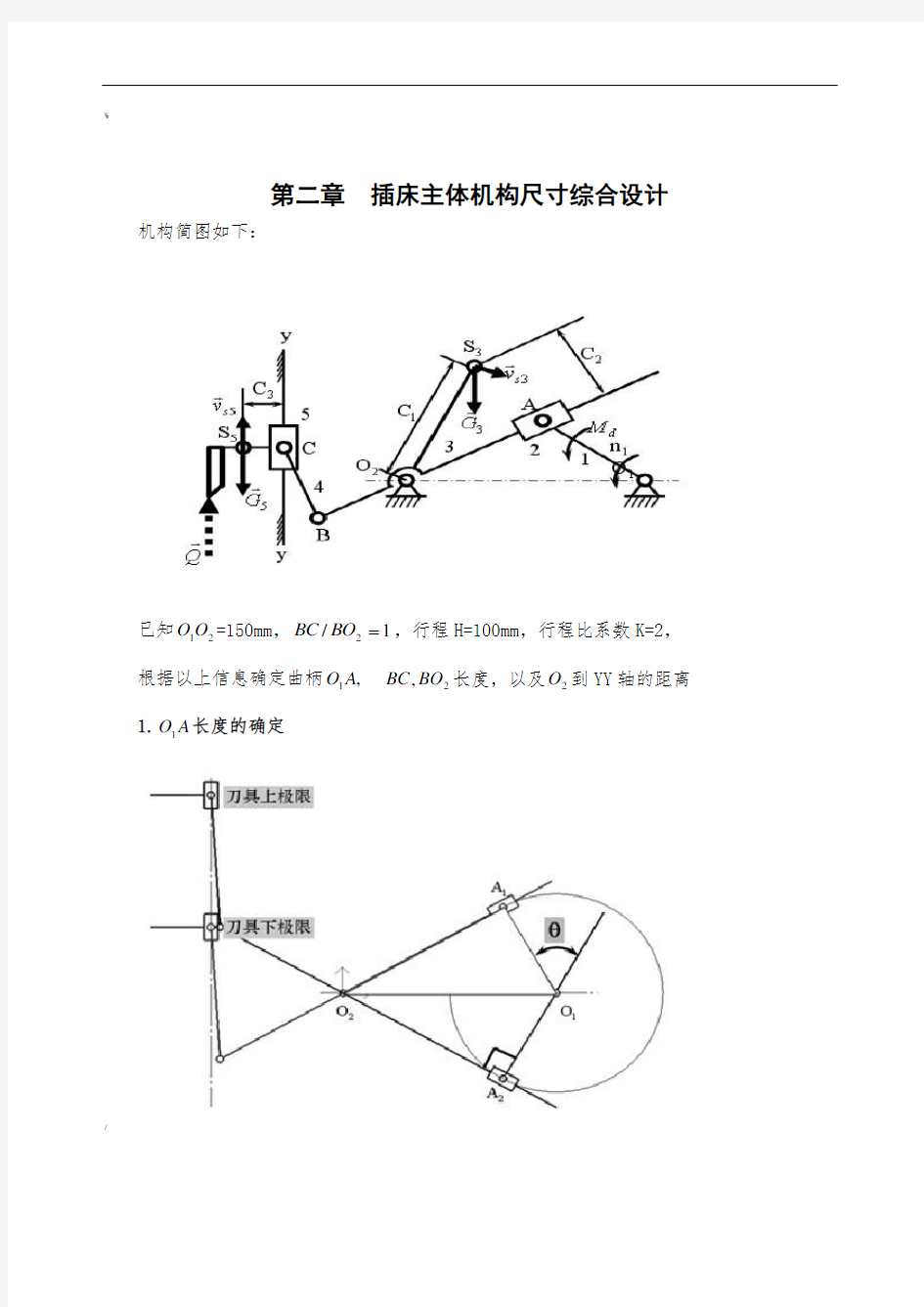
图 1 极限位置
由)180/()180(00θθ-+=K ,得极为夹角:
060=θ,
首先做出曲柄的运动轨迹,以1O 为圆心,A O 1为半径做圆,随着曲柄的转动,有图知道,当A O 2转到12A O ,于圆相切于上面时,刀具处于下极限位置;当A O 2转到22A O ,与圆相切于下面时,刀具处于上极限位置。于是可得到12A O 与22A O 得夹角即为极为夹角
060=θ。由几何关系知,212211O O A O O A ∠=∠,于是可得,021221160=∠=∠O O A O O A 。由几何关系可得:
2111cos O O A O ?=θ
代入数据,21O O =150mm ,060=θ,得
…
mm A O 751=
即曲柄长度为75mm 2. 杆2BO BC 、的长度的确定
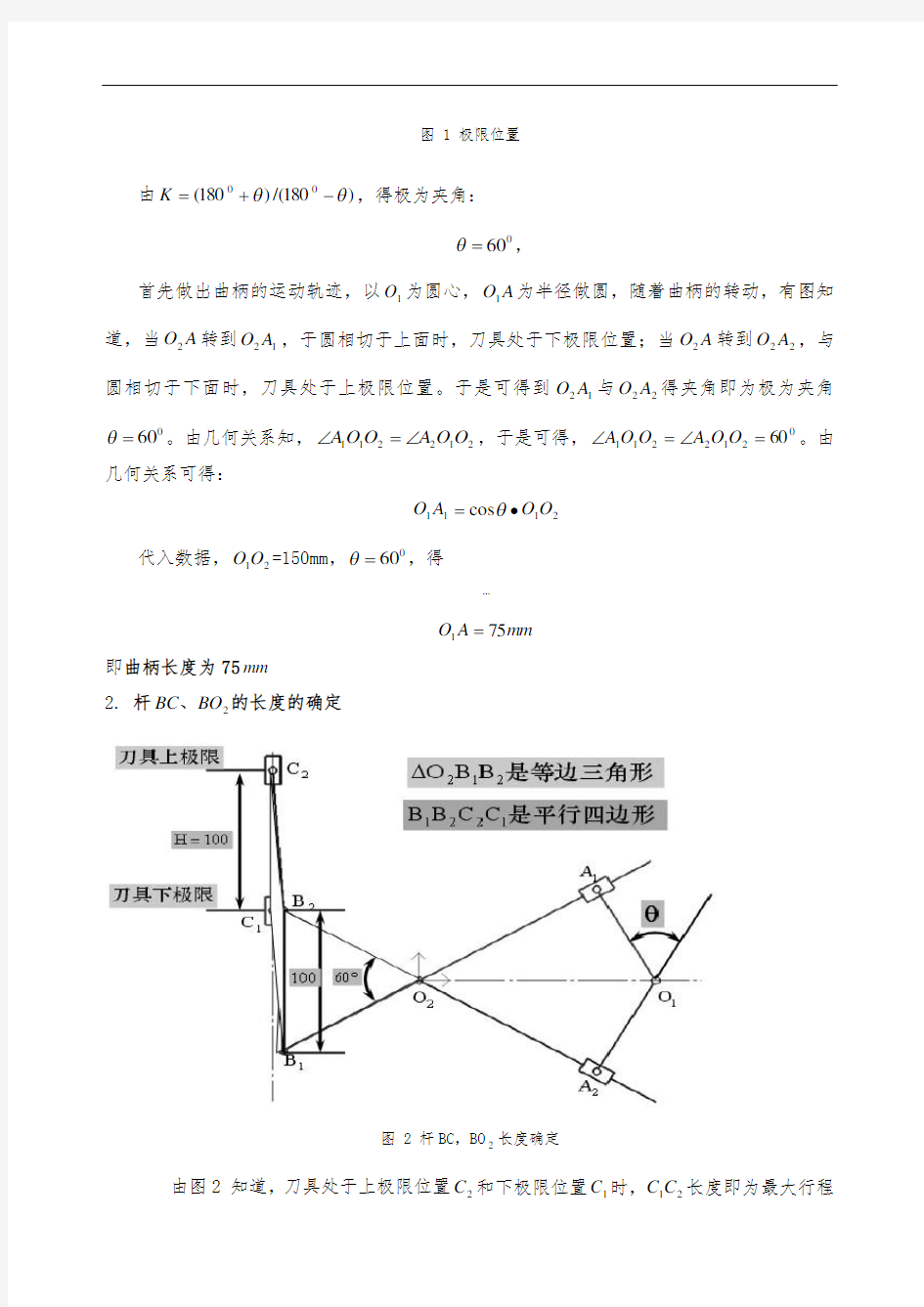
图 2 杆BC ,BO 2长度确定
由图2 知道,刀具处于上极限位置2C 和下极限位置1C 时,21C C 长度即为最大行程
H=100mm ,即有21C C =100mm 。
在确定曲柄长度过程中,我们得到021221160=∠=∠O O A O O A ,那么可得到
022160=∠B O B ,那么可知道三角形221O B B ?等边三角形。
又有几何关系知道四边形1221C C B B 是平行四边形,那么1212C C B B =,又上面讨论知
221O B B ?为等边三角形,于是有1221B B O B =,那么可得到mm O B 10022=,即mm BO 1002=
~
又已知1/2=BO BC ,于是可得到
mm BO BC 1002==
即杆2,BO BC 的100mm 。 3.2O 到YY 轴的距离的确定
图 3 2O 到YY 轴的距离
有图我们看到,YY 轴由3311y y y y 移动到过程中,同一点的压力角先减小,后又增大,那
么在中间某处必有一个最佳位置,使得每个位置的压力角最佳。 ?
B1
考虑两个位置:
1当YY 轴与圆弧12B B 刚相接触时,即图3中左边的那条点化线,与圆弧12B B 相切与B1
点时,当B 点转到12,B B ,将会出现最大压力角。 2.当YY 轴与12B B 重合时,即图中右边的那条点化线时,B 点转到B1时将出现最大压力
角
为了使每一点的压力角都为最佳,我们可以选取YY 轴通过CB1中点(C 点为12B O 与12B B 得交点)。又几何关系知道:
2/)cos (cos 22222222C O B B O B O C O B B O l ∠?-+∠?=
由上面的讨论容易知道02230=∠C O B ,再代入其他数据,得:
mm l 3.93=
即2O 到YY 轴的距离为
%
综上,插床主体设计所要求的尺寸已经设计完成。选取1:1 的是比例尺,画出图形如图纸一上机构简图所示。
第三章 插床切削主体机构及函数曲线分析
主体机构图见第一张图。
已知m r w /60=,逆时针旋转,由作图法求解位移,速度,加速度。规定位移,速度,加速度向下为正,插刀处于上极限位置时位移为0.
当O 175=?
(1)位移 ;
在1:1 的基础上,量的位移为。,即 曲柄转过175°时位移为。
(2)速度
由已知从图中可知,2A V 与A O 1垂直,23A A V 与A O 2平行,3A V 与A O 2垂直,由理论力学中不同构件重合点地方法可得
∨
∨
∨
∨+=
→
→
→
方向
大小??22
33
A A A A v v v
其中,2A V 是滑块 上与A 点重合的点的速度,23A A V 是杆AOB 上与A 点重合的点相对于滑块
的速度,3A V 是杆AOB 上与A 点重合的速度。
又由图知,B v 与B O 2垂直,CB v 与BC 垂直,C v 与YY 轴平行,有理论力学同一构件不同点的方法可得:
∨
∨
∨
∨+=
→
→
→
??CB B
C
v v v 方向
大小 {
其中,C v 是C 点,即插刀速度,BC v 是C 点相对于B 点转动速度,B v 是B 点速度。
又B 点是杆件3 上的一点,,杆件3围绕2O 转动,且B 点和杆件与A 点重合的点在2O 的
两侧,于是可得:
33
22A A O B
O B v v →
→-=
由图量的mm A O 22032=,则可到
3220
100
A B v v =
由已知可得s mm A O w v A /47175212≈?=?=π,规定选取比例尺mm s mm u /151-?=,则可的矢量图如下:
最后量出代表C v 的矢量长度为12mm,
,
于是,可得 C v =s
即曲柄转过175°时,插刀的速度为s 。
(3)加速度
由理论力学知识可得矢量方程:
∨
∨
∨
∨∨+
+
=
→
→
→
→
?
方向
?大小?23232
A3
r A A k A A A αααα
其中,2A α是滑块上与A 点重合点的加速度,2A α=212/88.29577544s mm A O ≈?=?πω,
方向由4A 指向1O ;k A A 2
3α→
是科氏加速度,2
23323/10802s mm v A A k A A ≈??=ωα(其中233,A A A v v 大小均从速度多边形中量得),q 方向垂直42A O 向下;r
A A 23α是4A 相对于滑
块 的加速度,大小位置,方向与42A O 平行;n A3A2
α是C 点相对于B 点转动的向心加速
度,n A3O2α=22
/43.993/s mm BC v CB ≈,方向过由C 指向B ;t O A 2
3α是C 点相对于B 点转动
的切向加速度,大小位置,方向垂直BC 。次矢量方程可解,从而得到3A α。
B 时杆AOB 上的一点,构AOB 围绕2O 转动,又4A 与B 点在2O 的两侧,由
R R n t 2,ωαβα==(β是 角加速度)可得
33
22A A O B O B αα→
→-=
@
量出42A O 则可得到B α的大小和方向
又由理论力学,结合图可得到;
∨
∨
∨
∨
∨∨+
+
=
→
→
→
→
方向
大小??CB t n CB B
c
αααα
其中,
B α在上一步中大小方向都能求得;n CB
α
是C 相对于B 点转动的向心加速度
22/36/s mm BC v BC n CB ≈=α,方向由C 点指向B 点;t CB α是C 相对于B 点转动的切向加速度,
大小未知,方向与BC 垂直。次矢量方程可解,从而可得到C 点,即插刀的加速度。取比例尺mm s mm u /362-?=,可得加速度矢量图如下:
最后由直尺量的c a 长度为12mm ,于是,可得c a 2/432.0s m ≈ 当O 355=? (1)位移
~
在1:1 的基础上,滑块的位移为。,即 曲柄转过355°时位移为。 (2)速度
由已知从图中可知,2A V 与A O 1垂直,23A A V 与A O 2平行,3A V 与A O 2垂直,由理论力学中不同构件重合点地方法可得
∨
∨
∨
∨+=
→
→
→
方向
大小??22
33
A A A A v v v
其中,2A V 是滑块 上与A 点重合的点的速度,23A A V 是杆AOB 上与A 点重合的点相对于滑块的速度,3A V 是杆AOB 上与A 点重合的速度。
又由图知,B v 与B O 2垂直,CB v 与BC 垂直,C v 与YY 轴平行,有理论力学同一构件不
同点的方法可得:
∨
∨
∨
∨+=
→
→
→
??CB B
C
v v v 方向
大小 其中,C v 是C 点,即插刀速度,BC v 是C 点相对于B 点转动速度,B v 是B 点速度。
@
又B 点是杆件3 上的一点,,杆件3围绕2O 转动,且B 点和杆件与A 点重合的点在2O 的
两侧,于是可得:
33
22A A O B
O B v v →
→-=
由图量的mm A O 5.12352=,则可到
35
.123100A B
v v = 由已知可得s mm A O w v A /47175212≈?=?=π,规定选取比例尺mm s m u /101-?=,则可的矢量图如下:
;
最后量出代表C v 的矢量长度为,于是,可得:
C v s /m 0216.0=
即曲柄转过355°时,插刀的速度为s /m 0216.0方向沿YY 轴向上。
(3)加速度
由理论力学知识可得矢量方程:
∨
∨
∨
∨∨+
+
=
→
→
→
→
?
方向
?大小?23232
A3
r A A k A A A αααα
其中,2A α为滑块上与A 点重合点的加速度,2A α=2212/88.2957754s mm A O ≈?=?πω,方向
由
5A 指向
1
O ;
k A A 2
3α→
是哥氏加速度,
5/2222332332
3A O v v v A A A A A k A A =??=ωα(其中233
,A A A v v
大小均从速度多边形
中量得),方向垂直52A O 向下;r
A A 23α是3A 相对于滑块 的加速度,大小位置,方向与5
2A O 平行。 B 是杆AOB 上的一点,杆AOB 围绕2O 转动,又5A 与B5点在2O 的两侧,由
R R n t 2,ωαβα==(β是 角加速度)可得
(
355
2
2A A O B O B αα→
→
-=
量出52A O 则可得到B α的大小和方向
又由理论力学,结合图可得到;
∨
∨
∨
∨
∨∨+
+
=
→
→
→
→
方向
大小??CB t n CB B
c
αααα
其中,
B α在上一步中大小方向都能求得;n CB
α
是C 相对于B 点转动的向心加速度
22/44.155/s mm C B v BC n CB ≈=α,方向由C 点指向B 点;t CB α是C 相对于B 点转动的切向加速
度,大小未知,方向与BC 垂直。次矢量方程可解,从而可得到C 点,即插刀的加速度。取比例尺mm s m u /502-?=,可得加速度矢量图如下
代入数据可得:c a 2
/04.3s m
所有数据详见第四章表格 ,
2.凸轮机构的设计
凸轮摆杆行程角为θ=150,摆杆长度L O4D =125mm ,算出凸轮的最大推程为L=32mm ,如下图所示;凸轮推程运动规律为等加速等减速,回程运动规律为等速。画出凸轮的运动规律图,如下图所示;凸轮的基圆半径r b =50mm ,结合已知参数利用反转法画出凸轮的理论轮廓线,并描出实际轮廓线,作图尺寸比例为1/2(mm/mm):
作图步骤:
1)画出基圆O
1,再画出以摆杆长度L
O4D
为半径的圆O
2
与基圆同圆心;
2)利用反转法在圆O
2转过900四等分,分别以各等分点为圆心,以摆杆长度L
O4D
为半
径各画一段弧分别与基圆相交四个点,然后在凸轮运动规律图上对应的等分点上
量取尺寸,并以此尺寸为半径,以与基圆相交的点位圆心画弧,两圆弧相交一点
即为所要求的点。同理画出回程时的凸轮运动轨迹;
3)选取滚子半径
g
r,画出凸轮的实际廓线。如下图:
(
<4>齿轮机构的设计
已知:z1=14 z2=70 m=10 α=20°*
a
h=1 *c=
1)确定变位系数
对于变位齿轮,为有利于强度的提高,小齿轮采用正变位,大齿轮采用负变位,,使大小齿轮的强度趋于接近,从而使齿轮承载能力提高。
X 1min =*a
h
min min Z Z Z -=0 X 2min =*
a h min
min Z Z Z -=-4
{
则取X 1=0 X 2=0 (满足X 2> X 2min )
2)确定中心距变动系数y 及齿顶高降低系数Δy X 1=0 X 2=0 则是标准齿轮传动,即y=0 Δy=0 3)变位齿轮的几何尺寸
"
. 凸轮廓线的绘制:
①选定角度比例尺,作出摆杆的角位移曲线,如图3-3(b)所示,将其中的推程和回程角位移曲线横坐标分成若干等分.
[
②选定长度比例尺,作以O 为圆心以OB=0r 为半径的基圆;以O 为圆心,以OA=a 为半径作
反转后机架上摆杆转动中心的圆.
③自A 点开始沿-ω方向把机架圆分成与图3-3(b)中横坐标相应的区间和等分,得点
123,,...A A A ,再以123,,...A A A 为圆心,以AB=L 为半径作弧与基圆交于点'''123,,...B B B ,得线段'''112233,,...A B A B A B .
④自线段'''112233,,...A B A B A B 开始,分别作123,,...???,使它们分别等于图3-3(b)中对应的角位移,得线段112233,,...A B A B A B .
⑤将点112233,,...A B A B A B 连成光滑曲线,它就是所求理论轮廓线. ⑥实际轮廓线可用前述滚子圆包络线的方法作出.如图3-3(a)所示.
…
三、具体要求
插床是用于加工各种内外平面、成形表面,特别是键槽和带有棱角的内孔等的机床(如参数n r H L O1O2C1C2
~
C3
C4G3G5J S3Q Kδ!
单位rpm mm mm mm mm mm mm
.
N
N Kgm2N
数据60
:
1001501205050120160320
$
10002
另:l BC/l BO2=1,工作台每次进给量0.5mm,刀具受力情况参考图2。机床外形尺寸及各部份联系尺寸如图1所示(其中:l1 =1600,l2 =1200, l3 =740, l4 =640, l5 =580, l6 =560, l7 =200, l
8
=320, l9 =150, l10 =360, l11 =1200,单位均为mm,其余尺寸自定。
所有数据详见第四章表格
第四章重要数据及函数曲线分析
$
()()()
,,
S V a
???数据表
角度位移S(mm)速度
V(m/s)
加速度
α(m/s2)
7、
1432 214] 28
358、42
49/ 56
63* 70
7725[ 8430
9131? 98
10541[ 11245
119) 12655
13357} 140
147~ 154
16173}
16876
175:
180 83
187 85 *
194 90
201 92 [
208
215 95 \
222 98
229 ·
236 99
243 99 ,
250 98
257 97 "
264
271 90 …
278
285 73 、
292 66
299 ·
306
313 ~
320 327 334 341 3 348 355 360
1、()S ??-图的分析:
随着曲柄,1A O 逆时针转动角度的增大,滑块C 位移由0开始增大,大约在240度时达
到最大,然后开始减少,易知滑块C 进程与回程时,曲柄,1A O 转动的角度并不相等,这说明了曲柄,1A O 转动时存在急回运动。 2、()V ??-图的分析:
随着曲柄,1A O 逆时针转动角度的增大,即?的增加,速度V 正向增大,大约在120度时达到最大,然后呈现下降趋势,在240度时下降为0,表明位移以增大到最大,即滑块C 达到最下端,由曲线看出,滑块C 的正向平均速度比负向平均速度小,进一步表明了急回
运动的存在。进程时,速度比较小,更有利于进刀;回程时,速度较快,有利于提高工作效率,充分证明了此机构设计的合理性。
下面对特殊点作一下分析:转角为0度时,V=0;曲柄转动至120度,正向速度到达最大值0.22m/s ,此时滑块C 具有最大速度,当曲柄继续转动至240度时正向速度减少至0,此时由速度是位移的变化率可知,其位移达到最大值。当曲柄继续转动时,滑块C 速度反向,变为负向速度,随着转角增大而增大,曲柄转至240度,速度达到负向最大值0.63m/s 之后,当滑块继续由摇杆带动时,却曲柄由300度转至360度时,其速度由负向最大值变为0.
3、()a ??-图的分析:
随着曲柄,1A O 逆时针转动角度的增大,滑块C 先向下作加速运动,但加速度越来越小,
但是加速度越来越小,然后反向增大知道位移达到最大,接着滑块进入空回程,由于存在急回运动,加速度迅速正向增大,达到最大后又开始减小,直到滑块C 进入工作行程。
下面对一些特殊点进行分析:进程时,滑块C 具有正向加速度,由开始减少,在102度时达到0,当角度继续增大时,加速度反向增大,大约在240度时滑块位移达到最大值,但是加速度还是在反向增大,而且增长率明显比前段更大,当角度达到270度时加速度增大到5.2m/s2时到达峰值,开始减少,在300度左右是达到0,然后正向增长,表明了滑块将要向上减速运动,最后回到0位移,然后往复运动。我们可以看出,在0至240度区间内,加速度都很平缓,而在240至360度内,加速度变化很快,都说明了急回运动的存在。
第六章总结
通过这段时间的设计,我受益匪浅,不仅在学问方面有所提高,而且在为人处事方面有了更多的认识。
当我们遇到一个问题时,首先不能畏惧,而是要对自己有信心,相信通过自己的努力一定能解决的。就象人们常说的在战略上藐视它。但是在战术上的重视它。通过慎重的考虑认真的分析,脚踏实地去完成它,克服重重困难,当你成功实现目标时,那种成就感一定会成为你成长的动力。
这次设计的题目是插床。主要是确定机械传动的方案,通过凸轮机构到回杆机构,回杆平行机构带动棘轮传动,再传到工作台,从而使工作台进行间歇进给运动,使刀具能安全的进行切削。
这次设计课程不仅让我加深了对机械原理理论课程的理解和认识,更培养了我用理论知识去解决实际问题的能力。也许我的这种方案不是很好的方案,但它解决了工作台间隙进给运动的问题。作为初次接触设计的我,对未来的设计充满了信心。
我希望学校多开设这类的设计课程,不仅帮助我们理解理论知识,更重要的是让我们学会用理论知识解决实际问题,帮助我们把理论知识转化成一种能力,让我们更容易解决问题。
1.巩固理论知识,并应用于解决实际工程问题;
2.建立机械传动系统方案设计、机构设计与分析概念;
3.进行计算、绘图、正确应用设计资料、手册、标准和规范以及使用经验数据的能力训练。
长江学院 机械原理课程设计说明书设计题目:插床机构设计 学院:机械与电子工程学院 专业: 班级: 设计者: 学号: 指导老师: 2016年7月1日
目录 题目及设计要求 (3) 1机构简介 (3) 2设计数据 (4) 二、插床机构的设计内容与步骤 (6) 1、导杆机构的设计与运动分析 (6) ⑴、设计导杆机构。 (6) ⑵、作机构运动简图。 (6) ⑶、作滑块的运动线图。 (6) ⑷、用相对运动图解法作速度、加速度多边形。 (7) 2、导杆机构的动态静力分析 (8) ⑴、绘制机构的力分析图(图1-4)。 (8) ⑵、选取力矩比例尺μM(N.mm/mm),绘制等效阻力矩Mr的曲线图 (9) ⑶、作动能增量△E―φ线。 (10) 3、用解析法较好机构运动分析的动态静力分析结果 (11) ⑴、图解微分法 (11) ⑵、图解积分法 (14) 4、飞轮设计 (14) 5、凸轮机构设计 (16) 6、齿轮机构设计 (19) 三、感想与体会 (21) 四、参考文献 (22)
题目及设计要求 1机构简介 插床是一种用于工件内表面切削加工的机床,也是常用的机械加工设备,用于齿轮、花键和槽形零件等的加工。图1为某插床机构运动方案示意图。该插床主要由带转动、齿轮传动、连杆机构和凸轮机构等组成。电动机经过带传动、齿轮传动减速后带动曲柄1回转,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿道路y-y作往复运动,以实现刀具切削运动。为了缩短空程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴O2上的凸轮驱动摆动从动件O4D和其他有关机构(图中未画出)来实现的。为了减小机器的速度波动,在曲柄轴O2上安装一调速飞轮。为了缩短空回行程时间,提高生产效率,要求刀具具有急回运动,图2为阻力线图。
目录 第一章绪论 第二章插床主体机构尺寸综合设计 第三章插床切削主体结构运动分析 第四章重要数据及函数曲线分析 第五章工作台设计方案 第六章总结 ; — @
第一章绪论 一,设计的题目:插床运动系统方案设计及其运动分析。 二,此设计是工科专业在学习《机械原理》后进行的一次较全面的综合设计训练,其目的: 1.巩固理论知识,并应用于解决实际工程问题; 2.建立机械传动系统方案设计、机构设计与分析概念; 3.进行计算、绘图、正确应用设计资料、手册、标准和规范以及使用经验数据的能力训练。 三,主要内容: 1.确定插床主要尺寸,然后按1:1的比例画出图形。对插刀进行运动分析,选取适当比例尺画出不同点速度,加速度矢量图得到不同点的速度,加速度,并对两处位移,作出位移,速度,加速度同转角的图像 : 2.在内容1运动分析的基础上作出运动循环图,在运动循环图的指导下,根据设计要求确定工作台进给运动机构传动方案设计(包括上下滑板1和2进给运动的机构传动方案设计;回转台3分度运动的机构传动方案设计;刀具与工作台在运动中的协调性分析;) 3.整理和编写说明书一份,对图纸进行详细说明 时间安排 (1).第一天 明确任务,准备作图工具,并打扫教室。 (2). 第二、三天 在老师的指导下确定构建尺寸,作出机构简图,并进行运动分析,并作出一个周期的位移、速度、加速度随转角变化的图像 (3). 第四、五天 在老师的指导下,完成工作台的机构传动方案设计,并画出传动示意图。 (4). 第六、七、八天 < 自己总结,整理并编写说明书一份
| 机械原理课程设计任务书学院名称:专业:年级: 学生姓名: 学号: 指导教师: 一、设计题目插床传动系统方案设计及其运动分析 二、主要内容 1)对指定的机械进行传动系统方案设计; 2)对执行机构进行运动简图设计(含必要的机构创意实验); 3)飞轮设计; ( 4)编写设计说明书。 三、具体要求 插床是用于加工各种内外平面、成形表面,特别是键槽和带有棱角的内孔等的机床(如 另:l BC/l BO2=1,工作台每次进给量0.5mm,刀具受力情况参考图2。机床外形尺寸及各部份联系尺寸如图1所示(其中:l1 =1600,l2 =1200, l3 =740, l4 =640, l5 =580, l6 =560, l7 =200, l8 =320, l9 =150, l10 =360, l11 =1200,单位均为mm,其余尺寸自定。 四、完成后应上交的材料 1) 机械原理课程设计说明书; 2) 一号图一张,内容包括:插床机构运动简图、速度及加速度多边形图、S(φ)-φ曲线、 V(φ)-φ曲线和a(φ)-φ曲线; 3) 三号坐标纸一张:Med(φ)、Me r(φ)-φ曲线; [
大学普通高等教育 机械原理课程设计 题目题号:插床导杆机构位置3的设计 学院:机电工程学院 专业班级: 学生: 指导教师 成绩: 2013 年7月 2 日
目录 一、工作原理 二、设计要求 三、设计数据 四、设计容及工作量五. 设计计算过程 (一). 方案比较与选择 (二). 导杆机构分析与设计 1.机构的尺寸综合 2. 导杆机构的运动分析
一、工作原理: 插床机械系统的执行机构主要是由导杆机构和凸轮机构组成。下图为其参考示意图,电动机经过减速传动装置(皮带和齿轮传动)带动曲柄2转动,再通过导杆机构使装有刀具的滑块6沿导路y —y 作往复运动,以实现刀具的切削运动。刀具向下运动时切削,在切削行程H 中,前后各有一段0.05H 的空刀距离,工作阻力F 为常数;刀具向上运动时为空回行程,无阻力。为了缩短回程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴O 2上的凸轮驱动摆动从动件D O l 8和其它有关机构(图中未画出)来完成的。 二、设计要求: 电动机轴与曲柄轴2平行,使用寿命10年,每日一班制工作,载荷有轻微冲击。允许曲柄2转速偏差为±5%。要求导杆机构的最小传动角不得小于60o ;凸轮机构的最大压力角应在许用值[α]之,摆动从动件8的升、回程运动规律均为等速运动。执行构件的传动效率按0.95计算,系统有过载保护。按小批量生产规模设计。
三、插床导杆机构设计数据 四、设计容及工作量: 1、根据插床机械的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。 2、根据给定的数据确定机构的运动尺寸, ()46.0~5.0BO BC l l =。要求用图解法设计,并将 设计结果和步骤写在设计说明书中。 3、导杆机构的运动分析。分析导杆摆到两个极限位置及摆到与机架O 2O 4位于同一直线位置时,滑块6的速度和加速度。 4、凸轮机构设计。根据所给定的已知参数,确定凸轮机构的基本尺寸(基圆半径r o 、机架82O O l 和滚子半径r b ),并将运算结果写在说明书中。用几何法画出凸轮机构的实际廓线。 5、编写设计说明书一份。应包括设计任务、设计参数、设计计算过程等。 6、按1:2绘制所设计的机构运动简图。
机械原理课程设计 计算说明书 课题名称:插床机构的设计 姓名:超 院别:工学院 学号: 2012010803 专业:机械设计制造及其自动化 班级:机设1201班 指导教师:原芳 2014年6 月7日
工学院课程设计评审表
设计目录 1 机械原理课程设计任务书 (4) 1.1课程设计的目的和任务 (4) 1.2机构简介与设计数据 (4) 1.3设计容 (6) 1.4设计步骤和要求 (6) 2 机构简介与设计数据设计 (7) 1.1 插床简介 (7) 1.2 设计数据.................................................................. (8) 3 插床机构的设计及尺寸计算 (9) 3、1曲柄导杆机构的设计及尺寸计算 (9) 3、2用图解法进行机构的运动分析 (14) 3、3用图解法进行机构的动态静力分析 (18) 4 凸轮机构设计 (21) .心得与体会 (22) .参考文献 (23)
机械原理课程设计任务书 学生 超 班级 1201 学号 2012010803 位置 10 设计题目一:插床机构设计及分析 一、课程设计的目的和任务 1.课程设计的目的 机械原理课程设计是机械原理教学的一个重要组成部分。机械原理课程设计的目的在于进一步巩固和加深学生所学的机械原理理论知识,培养学生独立解决实际问题的能力,使学生对机械的运动学和动力学的分析和设计有一较完整的概念,并进一步提高电算、绘图和使用技术资料的能力,更为重要的是培养开发和创新机械的能力。 2.、课程设计的任务 用图解法对插床的连杆机构进行运动分析和动力分析,设计凸轮机构。要求画出A 1图纸一,写出计算说明书一份。 二、 机构简介与设计数据 1.插床主要由齿轮机构、导杆机构和凸轮机构等组成,如图1所示。电动机经过减速装置(图中只画出齿轮1z 、2z )使曲柄1转动,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿导路作往复直线运动,以实现刀具切削运动。为了缩短空行程时间,提高生产效率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴2O 上的凸轮驱动摆动从动件O 4D 和其他有关机构(图中未画出)来完成的。为了缩短空回形成时间,提高生产效率,要求刀具有急回运动。 在工作行程中,刀具上作用有相当大的切削阻力,在切削行程的前后各有一段0.05H (H 为刀具行程)行程,如图2所示。而在空回行程中则没有切削阻力,因此在一个工作循环中,刀具受力变化很大,从而影响了主轴的匀速运转,为减小主轴的速度波动,需采用飞轮调速,以减小电动机容量和提高切削质量。 插床机构简图如图1所示,题目数据列于表1。 图1 插床机构简图
机械原理 课程设计说明书设计题目:插床导杆机构
已知O2O3=160mm,BC/BO3=1,行程H=120mm,行程比系数K=2,根据以上信息确定曲柄O2A ,BC,BO3长度,以及O3到YY轴的距离。 导杆机构的设计 计算过程计算结果O2A长度的确定 由) 180 /( ) 180 (0 0θ θ- + = K,得极为夹角: 60 = θ, 首先做出曲柄的运动轨迹,以O2为圆心,O2A为半径做 圆,随着曲柄的转动,有图知道,当O2A转到9,于圆相切 于上面时,刀具处于下极限位置;当O2A转到1,与圆相切 于下面时,刀具处于上极限位置。于是可得到1与9的夹角 即为极为夹角0 60 = θ。由几何关系知,9 1 2 3 2 3 O O O O∠ = ∠, 于是可得, 9 1 2 3 2 3 O O O O∠ = ∠? =60。由几何关系可得: ? =COS60 2 3 2 O O A O 代入数据,O2O3=160mm,得 柄长为80mm。 60 = θ O2A=80mm
2.杆 2 BO BC、的长度的确定 当刀具处于上极限位置C2和下极限位置C1时,C1C2长 度即为最大行程H =120mm,即有C1C2=120mm。在确定曲 柄长度过程中,我们得到9 1 2 3 2 3 O O O O∠ = ∠? =60,那么可得 到? = ∠60 2 3 1 B O B,那么可知道三角形△B 1 O3B2是等边三角 形。 由几何关系知道B1B2C2C1四边形是平行四边形,那么 B2B1=C2C1,又上面讨论知△B1O3B2为等边三角形,于是有 B1O3=B1B2,那么可得到BO3=100mm 又知BC/BO3=1,所以有 BC=100mm BO2=120mm BC=120mm 3.O3到YY轴的距离的确定 YY轴由 3 3 1 1 y y y y移动到过程中,同一点的压力角先减小, 后又增大,那么在中间某处必有一个最佳位置,使得每个位 置的压力角最佳。 考虑两个位置: 1当YY轴与圆弧 1 2 B B刚相接触时,即图3中左边的那 条点化线,与圆弧 1 2 B B相切与B1点时,当B点转到 1 2 ,B B, 将会出现最大压力角。
机械原理课程设计指导书 一、设计内容与步骤(以插床为例) 1、导杆机构的设计及运动分析 已知:行程速度系数K ,滑块5的行程H ,中心距32O O l ,比值B O BC l l 3/,各构件质心S 的 位置,曲柄每分钟转数n 1。 要求:设计导杆机构,作导杆机构的运动简图;作机构2个位置的速度多边形和加速度多 边形,对导杆机构进行运动分析,以上内容与后面动态静力分析一起画在3号图纸上(每个位 置各画一张)(参考图例);做滑块的运动线图,以上内容做在一张4号图纸上。整理说明书。 步骤: 1)设计导杆机构。按已知条件确定导杆机构的各未知参数。其中滑块5的导路y -y 的位置 可根据连杆4传力给滑块5的最有利条件来确定,即y -y 应位于B 点所画圆弧高的平分线上(见 图例1)。 2)作机构运动简图。选取长度比例尺μl )m/mm (按位置分配表所分配的2个曲柄位置作出 机构运动简图,其中1个位置用粗实线画出。 3)作速度、加速度多边形。选取速度比例尺μv )mm s /m (和加速度比例尺μa )mm s /m (2 ,用相对运 动图解法作该2个位置的速度多边形和加速度多边形,并将其结果列入下表。 4)作滑块的位置线图。根据机构的各个位置,找出滑块5上C 点的各对应位置,以位置1 为起始点,量取滑块的相应位移,取位移比例尺μs )m/mm (,作s C (t )线图。为了能直接从机 构运动简图上量取滑块位移,建议取μs =μl 。 5)绘制滑块的速度线图。列表汇集同组同学用相对运动图解法求得的各个位置的速度v C , 绘制速度v C (t )线图。 6)绘制滑块的加速度线图。列表汇集同组同学用相对运动图解法求得的各个位置的加速度 C a ,绘制加速度)(t a C 线图。 7)整理计算说明书。内容包括:已知条件与要求;所选比例尺;导杆机构设计简述;以一 个机构位置为例,说明用相对运动图解法求机构的速度和加速度的计算方法和过程,另一位置 只需画出速度和加速度线图,列出计算结果。
机械原理课程设计 插床机构综合 学生姓名: 卢佛俊 专业班级: 08机电二班 学号: 20087668 目录 一、设计题目简介 二、设计数据与要求 三、设计任务 四、插床主体机构尺寸综合设计 五、插床切削主体结构运动分析 六、重要数据及函数曲线分析 七、工作台设计方案 八、总结 九、参考文献 设计题目:插床机构综合 一、设计题目简介 插床就是常用得机械加工设备,用于齿轮、花键与槽形零件等得加工。图示为某插床机构运动方案示意图。该插床主要由带转动、齿轮传动、连杆机构与凸轮机构等组成。电动机经过带传动、齿轮传动减速后带动曲柄1回转,再通过导杆机构1-2-3-4-5-6,使装有刀具得滑块沿道路y-y作往复运动,以实现刀具切削运动。为了缩短空程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间得进给运动,就是由固结于轴上得凸轮驱动摆动从动件与其她有关机构(图中未画出)来实现得。
针对图所示得插床机构运动方案, 进行执行机构得综合与分析。二、设计数据与要求 依据插床工况条件得限制,预先确定了有关几何尺寸与力学参数,如表6-4所示。要求所设计得插床结构紧凑,机械效率高。 插床机构设计数据 插刀往复次数(次/min ) 60 插刀往复行程 (mm ) 100 插削机构行程速比系数 2 中心距(mm ) 150 杆长之比 1 质心坐标(mm ) 50 质心坐标(mm ) 50 质心坐标 (mm ) 120 插床机构运动方案示意图 插刀所受阻力曲线
三、设计任务 1、 针对图所示得插床得执行机构(插削机构与送料机构)方案,依据设计要求与已知参数,确定各构件得运动尺寸,绘制机构运动简图; 2、 假设曲柄1等速转动,画出滑块C 得位移与速度得变化规律曲线; 3、 在插床工作过程中,插刀所受得阻力变化曲线如图所示,在不考虑各处摩擦、其她构件重力与惯性力得条件下,分析曲柄所需得驱动力矩; 4、 取曲柄轴为等效构件,确定应加; 5、 用软件(VB 、MATLAB 、ADAMS 或 SOLIDWORKS 等均可)对执行机构进行运动仿真,并画出输出机构得位移、速度、与加速度线图。6、 图纸上绘出最终方案得机构运动简图(可以就是计算机图)并编写说明书。 四、插床主体机构尺寸综合设计 方案选择: 方案一:结构简图如下 方案二:机构简图如下: 凸轮摆杆行程角(0) 15 推程许用压力角(0) 45 推程运动角(0) 90 回程运动角(0) 60 远程休止角(0) 15 推程运动规律 3-4-5次多项式 回程运动规律 等速 速度不均匀系数 0、05 最大切削阻力(N ) 1000 阻力力臂(mm ) 120 滑块5重力(N ) 320 构件3重力 (N ) 160 构件3转动惯量 (kgm 2) 0、14
一部分插床导杆机构综合及运动任务
————————————————————————————————作者:————————————————————————————————日期:
第一部分插床导杆机构综合及运动的任务 一、已知条件 形成速度变化系数K,铰链中心和之间的距离,滑块5的冲程H,杆长比 ,滑块5的导路方向y-y垂直于导杆3摆角的分角线,并使导杆机构 在整个行程中都能得到较小的压力角,曲柄转速及指定的相对运动图解法的作业位置。 二、基本要求 1)确定图中给出的机构相关尺寸,即需确定下列尺寸: 曲柄1的长度,导杆3的长度,连杆4的长度,固定铰 链中心到滑块5的导路y-y的距离h(此处,y-y是和铰链中心C的轨迹相重合的直线); 2)按指定的作业位置作出机构运动简图,并用相对运动图解法求滑块5的速度和加速度,质心的加速度; 3)作出滑块5的位移曲线,并用图解微分法求出速度曲线,将结果与用相对运动图解法求得的滑块速度 作比较。 三、完成内容 在计算说明书上,应完成下列内容: 1)列出基本方程式及主要运算过程和数据; 2)列出主要的求解结果(包括机构的各主要尺寸,各构件的角速度和角加速度);3)列表比较相对运动图解法和图解微分法所得的值。 第二部分插床导杆机构动态静力分析的任务
一、已知条件 插床导杆机构综合与运动分析的结果,曲柄转速,切削力的变化规律及其作用线位置;滑块5的重量及其质心的位置;导杆3具有与其运动平面相平行的对称平面,导杆3的重量,质心的位置及对其质心轴的转动惯量;不计其余活动构件的质量;不计各运动副中的摩擦。 二、基本要求 1、按指定的作业位置,求出机构各运动副中的作用力; 2、按指定的作业位置,求出加于曲柄1的平衡力矩。要求分别用力多变形法和速度多变形杠杆法求解平衡力矩,并比较所得结果,计算相对误差 式中,—用力多变形法求得的平衡力矩; —用速度多变形法求得的平衡力矩。 三、完成任务 在计算说明书上,应完成下列内容: 1、列出各构件惯性力和惯性力矩的计算结果; 2、列出各示力体的平衡方程式及未知力的求解结果; 3、列出用速度多变形杠杆法求平衡力矩 的力矩平衡方程和求解结果; 4、列表比较和,按照上面公式求得相对误差。
工程技术大学 课程设计说明书 课程名称:机械原理课程设计 院系:机械工程学院 专业班级:机自17-4 姓名:海鹏 学号: 1707010430
总评成绩及评语 评语: □经考核,该同学基本完成了课程设计的全部任务,达到任务书的训练要求。 □经考核,该同学在课程设计期间未完成设计任务。 成绩: 根据该同学完成任务情况,结合课程设计期间表现,经教研室答辩小组综合审定,该同学机械原理课程设计成绩为 教师签名
机械原理课程设计任务书(十一) 海鹏 专业 机自 班级 17-4 学号 1707010430 一、设计题目:插床齿轮机构的设计 二、系统简图: 三、工作条件 已知:齿数1Z 传动,齿轮与曲柄共轴。 四、原始数据 五、要求: 1)依据题目条件和不根切条件,计算符合的变位系数(至少5组); 2)选定一组变位系数,计算该对齿轮传动的各部分尺寸; 3)在A3纸上画出齿轮啮合图;要求:①按设计尺寸画;②作图体现:极限啮合点1N 、 2N ,啮合角α' ,四个圆b d d a d f d 和节圆d ' ,12B B ,每个齿轮画出3条渐开线 (2同1异),每条渐开线找出起始点(b b b P S e =+ )齿顶圆齿厚(1a s 2a s )。 4)编写说明书。 指导教师:席本强 曲辉 开始日期: 2019 年 7 月 10 日 完成日期: 2019 年 7 月 17 日
1数学模型 1中心距a ': 2)(21z z m a +? = ; a '=(a/5+1)?5; 2啮合角α': ; )cos(2) ()cos(21ααα?'?+= 'z z m 实αααinv z z x x inv +++=')/()(tan 22121; 3分配变位系数2 1 x x 、; 17sin 22min ≈=* αa h z min 1min min 1/)(z z z h x a -=* ; min 2min min 2/)(z z z h x a -=* ; ; αααtan 2) )((2121z z inv inv x x +-'= + 4齿轮基本参数: (注:下列尺寸单位为mm ) 齿顶高系数: 0.1=* a h 齿根高系数: 25.0=* c 齿顶高变动系数: y x x -+=21σ
插床机构综合与传动系统设计 目录 题目及设计要求 (2) 一、设计题目 (2) 二、设计数据与要求 (3) 三、设计任务 (3) 设计: (4) 一、确定各构件的运动尺寸,绘制机构简图 (4) 1、插削机构的设计: (4) 2、送料机构(凸轮机构)的设计: (4) 二、假设曲柄1等速转动,画出滑块C的位移和速度的变化规律曲线(插削机构的运 动学分析) (9) 1)位置分析 (9) 2)角速度分析 (10) 3)角加速度分析 (10) 三、在插床工作过程中,插刀所受的阻力变化曲线如图2所示,在不考虑各处摩擦、 其他构件重力和惯性力的条件,分析曲柄所需的驱动力矩 (14) 四、确定电动机的功率和转速。 (16) 五、取曲柄轴为等效构件,确定应加于曲柄轴上的飞轮转动惯量。 (17) 六、感想与建议。 (17) 七、参考文献。 (17)
题目及设计要求 一、设计题目 插床是常用的机械加工设备,用于齿轮、花键和槽形零件等的加工。图6-15为某插床机构运动方案示意图。该插床主要由带转动、齿轮传动、连杆机构和凸轮机构等组成。电动机经过带传动、齿轮传动减速后带动曲柄1回转,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿道路y -y 作往复运动,以实现刀具切削运动。为了缩短空程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴上的凸 轮驱动摆动从动件 和其他有关机构(图中未画出)来实现的。画出)来实现的。 针对图3-30所示的插床机构运动方案,进行执行机构的综合与分析,并进行传动系统结构设计。 Q 图3-30 插床机构运动方案示意图
机械原理课程设计任务书(十) 姓名 苑煜家 专业 液压传动与控制 班级 液压09-1 学号 0907240125 一、设计题目:插床导杆机构的设计及运动分析 二、系统简图: 三、工作条件 3位置,曲柄每分钟转数1n 。 四、原始数据 五、要求: 1)设计导杆机构; 2)显示机构两个位置; 3)作滑块的运动线图(编程设计); 4)编写说明书。 指导教师:郝志勇 席本强 开始日期: 2011 年 6 月 26 日 完成日期: 2011 年 6 月 30 日
目录1.设计任务及要求2.数学模型的建立3.程序框图 4.程序清单及运算结果5.总结和目的 6. 参考文献
1数学模型 急位夹角60°,θA 2=75mm,a=b=100mm 1.()55θt ωt = 2.5 65 5tx sin θθarctan x cos θ= ()0556x ωωcos θθy =- 3.θ1=θ 6 -180. ()()()2655655656561εx εcos θθx ωsin θθωωsin θθy ??= ---+-?? 4.连杆的角位移方案15asin θc θarcsin b -?? = ??? 5.滑块5的位移方程(ε5=0) 11asin θc d acos θbcos arcsin b -?? ??=- ?????? ? 6.BC 杆角速度61 22 a ωcos θωbcos θ=
7.滑块速度方程() 12c 62 sin θθv a ωcos θ-= 8.22 516122 22 a εcos θa ωcos θ b ωsin θεbcos θ-+= 9.2k c 22226161a b εsin θb ωcos θa εsin θa ωcos θ=+-- 2.程序框图
机械原理课程设计 设计计算说明书 设计题目插床机械设计 设计任务书 1.1 设计题目 插床 1.2 插床简介 插床是用于加工中小尺寸垂直方向的平面或直槽的金属切削机床,多用于单件或小批量生产。 为了适用不同材料和不同尺寸工件的粗、精加工,要求主执行构件—插刀能以数种不同速度、不同行程和不同起始位置作垂直方向的往复直线移动,且切削时插刀的移动速度低于空行程速度,即插刀具有急回现象;安装工件的工作台应具有不同进给量
的横向进给,以完成平面的加工,工作台还应具有升降功能,以适应不同高度的工件加工。 1.3 设计要求及设计参数 设计要求:要求主执行机构工作行程切削平稳、压力角较小。进给机构压力角不超过许用值。 设计参数如下所示:插床机构设计3号题目参数 题号 3 主执行机构 曲柄转速n2/(r/min)50 曲柄l O2A/mm75 插刀行程H/mm120 行程速比系数K 1.8 连杆与导杆之比l BC0.55 力臂d(mm) 108 工作阻力F max(N) 10800 导杆质量m4(kg) 22 导杆转动惯量J S4(kgm2) 1.2 滑块质量m6(kg) 60 进给机构 从动件最大摆角max20 凸轮从动件杆长(mm) 130 推程许用压力角[] 推程42 回程许用压力角[] 回程50滚子半径r r(mm) 15 刀具半径r c(mm) 0.08
一:主执行机构设计与分析 1:插床机械设计参数以及相关参数计算 曲柄转速n 2/(r/min ) 曲柄长度l O2A =75mm 插刀行程H=120mm 行程速度比系数K=1.8 连杆与导杆之比l BC =0.55 力臂 d=108mm 工作阻力F=10800N 导杆4的质量m 4=22kg 导杆4的转动惯量Js4=1.1 滑块6的质量m 6=60 一、插床导杆机构的综合 1、计算极位夹角 、曲柄角速度1ω、曲柄角加速度1ε n 2=50 l O2A =75m m H=120m m K=1.8 l BC =0.55 d=108mm F=10800N m 4=22kg Js4=1.1 m 6=60 46.667θ= 1 4.922/rad s ω=
齐齐哈尔大学普通高等教育 机械原理课程设计 题目题号:插床导杆机构位置3的设计 学院:机电工程学院 专业班级: 学生姓名: 指导教师 成绩: 2013 年7月 2 日
目录 一、工作原理 二、设计要求 三、设计数据 四、设计内容及工作量 五. 设计计算过程 (一). 方案比较与选择 (二). 导杆机构分析与设计 1.机构的尺寸综合 2. 导杆机构的运动分析
一、工作原理: 插床机械系统的执行机构主要是由导杆机构和凸轮机构组成。下图为其参考示意图,电动机经过减速传动装置(皮带和齿轮传动)带动曲柄2转动,再通过导杆机构使装有刀具的滑块6沿导路y —y 作往复运动,以实现刀具的切削运动。刀具向下运动时切削,在切削行程H 中,前后各有一段0.05H 的空刀距离,工作阻力F 为常数;刀具向上运动时为空回行程,无阻力。为了缩短回程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴O 2上的凸轮驱动摆动从动件D O l 8 和其它有关机构(图 中未画出)来完成的。 二、设计要求: 电动机轴与曲柄轴2平行,使用寿命10年,每日一班制工作,载荷有轻微冲击。允 许曲柄2转速偏差为±5%。要求导杆机构的最小传动角不得小于60o ;凸轮机构的最大压力角应在许用值[α]之内,摆动从动件8的升、回程运动规律均为等速运动。执行构件的传动效率按0.95计算,系统有过载保护。按小批量生产规模设计。
三、插床导杆机构设计数据 四、设计内容及工作量: 1、根据插床机械的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。 2、根据给定的数据确定机构的运动尺寸, ()4 6.0~5.0BO BC l l =。要求用图解法设计,并将 设计结果和步骤写在设计说明书中。 3、导杆机构的运动分析。分析导杆摆到两个极限位置及摆到与机架O 2O 4位于同一直线位置时,滑块6的速度和加速度。 4、凸轮机构设计。根据所给定的已知参数,确定凸轮机构的基本尺寸(基圆半径r o 、机架8 2 O O l 和滚子半径r b ),并将运算结果写在说明书中。用几何法画出凸轮机构的实际廓线。 5、编写设计说明书一份。应包括设计任务、设计参数、设计计算过程等。 6、按1:2绘制所设计的机构运动简图。
提供全套,各专业毕业设计 插床机构设计
目录 一、工作原理 3 二、设计要求 3 三、设计数据 3 四、设计内容及工作量 4 五. 设计计算过程5 (一). 方案比较与选择5 (二). 导杆机构分析与设计 6 1.机构的尺寸综合8 2. 导杆机构的运动分析9 3. 凸轮机构设计14 六. 参考文献16
一、工作原理: (1)插床机械系统的执行机构主要是由导杆机构和凸轮机构组成。下图为其参考示意图,电动机经过减速传动装置(皮带和齿轮传动)带动曲柄转动,再通过导杆机构使装有刀具的滑块沿导路y—y作往复运动,以实现刀具的切削运动。刀具向下运动时切削,在切削行程H中,前后各有一段0.05H的空刀距离,工作阻力F为常数;刀具向上运动时为空回行程,无阻力。为了缩短回程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴上的凸轮驱动摆动从动件和其它有关机构来完成的。 (2) 二、设计要求: 电动机轴与曲柄轴平行,使用寿命10年,每日一班制工作,载荷有轻微冲击。允许曲柄转速偏差为±5%。要求导杆机构的最小传动角不得小于60o;凸轮机构的最大压力角应在许用值[α]之内,摆动从动件的升、回程运动规律均为等速运动。执行构件的传动效率按0.95计算,系统有过载保护。按小批量生产规模设计。 导杆机构运动分析 转速n2插刀行程 H(mm) 行程速比系数K 42 100 1.65 导杆机构运动分析 从动件最大摆角? max 从动件 杆长 许用压 力角 推程运 动角δ o 远休 止角 回程 运动角 δ’o 14°124 38°58°10°58° 导杆机构运动动态静力分析 工作阻力Fmax(N) 导杆质量 m4(kg) 滑块6质量 m6(kg) 导杆4质心转动 惯量Js4(kgm2) 3200 22 70 1.1 四、设计内容及工作量: 1、根据插床机械的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。 2、根据选定的电机和执行机构的运动参数拟订机械传动方案。 3、画出机械运动方案示意图。
题目:插床 学院:机械工程学院 专业:机械设计制造及其自动化班级:机设C078 组号:第三组 姓名: 学号: 指导教师:
目录 一、设计题目与要求 二、工作原理及功能分解 三、机构的选择 四、机械运动方案简图 五、传动比的分配 六、机械系统运动循环图 七、机械传动机构和执行机构的设计及尺寸计算 八、注意事项 九、心得体会 十、主要参考资料
设计题目:插床 一、插床机械设计参数与设计要求: (1)原始数据: 方案 符合单位 ⅠⅡⅢn 转/分60 65 70 K 1.5 1.8 2 H mm 200 150 100 BD/BC 0.75 0.8 1 LOD mm 160 150 150 数据选取方案Ⅲ (2) 自上始点以下10一90mm范围内,插刀应尽可能等速切削,最小的上下空刀距离各为5mm。 (3) 行程速比系数k=2。 (4) 驱动电动机目前采用Y180L-8,其功率N=11kw,转速n=750r/min。 (5) 机构传动性能良好,结构紧凑,制造方便。 二、工作原理及功能分解: 1、工作原理:
插床是一种用于加工键槽、花键槽、异形槽和各种异性表面的金属切削机床。如图(1)所示装有插刀的滑枕沿铅垂方向(也可调有一定倾角)作往复直线主切削运动。 工件装夹在工作台上,工作台可作前后、左右和圆周方向的间歇进给运动。进给运动可手动,也可机动但彼此独立。进给运动必须与主切削运动协调,即插刀插削时严禁进给,插刀返回时进给运动开始进行,并于插刀重新切人工件之前完成复位。插床的主切削运动的行程长度、拄复运动速度以及进给量大小等均应手动可调。 图(1)运动示意图 2、功能分解:
机械原理课程设计 编辑说明书 设计题目:插床机构-导杆机构(3) 指导教师: 设计者: 学号: 班级: 年月日 辽宁工程技术大学
目录 1.设计任务及要求 (2) 2.数学模型的建立 (2) 3.程序框图 (4) 4.程序清单及运算结果 (4) 5.总结和目的 (12) 6.参考文献 (13)
1. 设计任务及要求 已知:程速比系数K=1.8,滑块5的冲程H=120,中心距23 o o l =150,比值3O B BC l L =1, 各构件重心S 的位置,曲柄每分钟转数n1=60。 要求 1. 设计导杆机构; 2. 作机构两个位置的动画显示; 3. 作滑块的运动线图(编程设计); 4. 编写说明书; 2数学模型 急位夹角51.4°=θ,O2A=75mm,a=b=50mm 1.()55θt ωt =
2.5 65 5tx sin θθarctan x cos θ= ()0556x ωωcos θθy =- 3.θ1=θ6-180. ()()()2655655656561εx εcos θθx ωsin θθωωsin θθy ??= ---+-? ? 4.连杆的角位移方案15a sin θc θarcsin b -?? = ??? 5.滑块5的位移方程(ε5=0) 11asin θc d acos θbcos arcsin b -?? ??=- ??????? 6.BC 杆角速度61 22 a ωcos θω b cos θ= 7.滑块速度方程() 12c 62 sin θθv a ωcos θ-= 8.22 516122 22 a εcos θa ωcos θ b ωsin θεbcos θ-+= 9.2 k c 22226161a b εsin θb ωcos θa εsin θa ωcos θ=+--
机械原理课程设计 编程说明书 设计题目:插床机构-导杆机构(1) 目 录 1. 设计任务及要求-----------------------------------------------------------------------1 2. 数学模型-------------------------------------------------------------------------------2 3. 程序框图--------------------------------------------------------------------------------3 4. 程序清单--------------------------------------------------------------------------------4 5. 运行结果--------------------------------------------------------------------------------11 6. 心得与体会-----------------------------------------------------------------------------12 7. 参考文献--------------------------------------------------------------------------------13 一.设计任务及要求 已知:程速比系数K=2,滑块5的冲程H=100mm ,中心距23 o o l =150mm,比值 3O B BC l L =1,各构件重心S 的位置,曲柄每分钟转数1n =60r/min 。 要求: 1. 设计导杆机构; 2. 作机构两个位置的动画显示; 3. 作滑块的运动线图(编程设计); 4. 编写说明书; 二.数学模型 1. 极位夹角 =60? 2. 杆长
. . 机械原理课程设计 插床机构综合 学生姓名:卢佛俊 专业班级:08机电二班 学号:20087668
目录 一、设计题目简介 二、设计数据与要求 三、设计任务 四、插床主体机构尺寸综合设计 五、插床切削主体结构运动分析 六、重要数据及函数曲线分析 七、工作台设计方案 八、总结 九、参考文献
设计题目: 插床机构综合 一、设计题目简介 插床是常用的机械加工设备,用于齿轮、花键和槽形零件等的加工。图示为某插床机构运动方案示意图。该插床主要由带转动、齿轮传动、连杆机构和凸轮机构等组成。电动机经过带传动、齿轮传动减速后带动曲柄1回转,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿道路y -y 作往复运动,以实现刀具切削运动。为了缩短空程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴上的凸轮驱动摆动从动件 和其他 有关机构(图中未画出)来实现的。 针对图所示的插床机构运动方案,进行执行机构的综合与分析。 二、设计数据与要求 依据插床工况条件的限制,预先确定了有关几何尺寸和力学参数,如表6-4所示。要求所设计的插床结构紧凑,机械效率高。 插床机构运动方案示意图 插刀所受阻力曲线
插床机构设计数据 三、设计任务 1. 针对图所示的插床的执行机构(插削机构和送料机构)方案,依据设计要求和已知参数,确定各构件的运动尺寸,绘制机构运动简图; 2. 假设曲柄1等速转动,画出滑块C 的位移和速度的变化规律曲线; 3. 在插床工作过程中,插刀所受的阻力变化曲线如图所示,在不考虑各处摩擦、其他构件重力和惯性力的条件下,分析曲柄所需的驱动力矩; 4. 取曲柄轴为等效构件,确定应加于曲柄轴上的飞轮转动惯量; 5. 用软件(VB 、MATLAB 、ADAMS 或SOLIDWORKS 等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。 6. 图纸上绘出最终方案的机构运动简图(可以是计算机图)并编写说 四、插床主体机构尺寸综合设计 方案选择: 方案一:结构简图如下 插刀往复行程 (mm ) 100 插削机构行程速比系数 2 中心距(mm ) 150 杆长之比 1 质心坐标(mm ) 50 质心坐标(mm ) 50 质心坐标(mm ) 120 凸轮摆杆长度(mm ) 120 凸轮摆杆行程角(0) 15 推程许用压力角(0) 45 推程运动角(0) 90 回程运动角(0) 60 远程休止角(0) 15 推程运动规律 3-4-5次多项式 回程运动规律 等速 速度不均匀系数 0.05 最大切削阻力 (N ) 1000 阻力力臂(mm ) 120 滑块5重力(N ) 320 构件3重力 (N ) 160 构件3转动惯量 (kgm 2) 0.14
机械原理课程设计插床 机构 文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)
插床机构综合与传动系统设计目录
题目及设计要求 一、设计题目 插床是常用的机械加工设备,用于齿轮、花键和槽形零件等的加工。图6-15为某插床机构运动方案示意图。该插床主要由带转动、齿轮传动、连杆机构和凸轮机构等组成。电动机经过带传动、齿轮传动减速后带动曲柄1回转,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿道路y -y 作往复运动,以实现刀具切削运动。为了缩短空程时间,提高生产率,要求刀具具有急回运动。刀 具与工作台之间的进给运动,是由固结于轴上的凸轮驱动摆动从动件和其 他有关机构(图中未画出)来实现的。画出)来实现的。 针对图3-30所示的插床机构运动方案,进行执行机构的综合与分析,并进行传动系统结构设计。 A B C D H O 2 x d b O 1 O 3 c a 1 2 3 4 5 6 n 2 n 1 z 1 z 2 y y Q S 5 S 1 图3-30 插床机构运动方
二、设计数据与要求 依据插床工况条件的限制,预先确定了有关几何尺寸和力学参数,如表6-4所示。要求所设计的插床结构紧凑,机械效率高。 表6-4 插床机构设计数据 三、设计任务 1. 针对图1所示的插床的执行机构(插削机构和送料机构)方案,依据设计要求和已知参数,确定各构件的运动尺寸,绘制机构运动简图; 2. 假设曲柄1等速转动,画出滑块C 的位移和速度的变化规律曲线; 3. 在插床工作过程中,插刀所受的阻力变化曲线如图6-16所示,在不考虑各处摩擦、其他构件重力和惯性力的条件下,分析曲柄所需的驱动力矩;
目录 摘要 (2) 引言 (2) 任务与分析 (2) 1 方案设计…………………………………………………………………………………1.1步进电机步距角误差测量系统总体方案的设计……………………………………… 1.1.1系统的驱动控制方案设计………………………………………………………………… 结论 (22) 参考文献 (23)
摘要 随着计算机的普及,网络成为了不可替代的工具。在如今的时代里,要想立于不败之地,必须勇于创新,在网络化的时代下商量出对策。而对于机械行业,网络自动化为大势所趋,这就要求我们充分运用网络。在计算机的辅助下,能够使机器自动化.网络化运作。对于机械的设计,不仅要考虑到实用的可能行,也要能够尽可能的节约成本,同时还要提高各部分的协作运行能力,此时计算机作以计算机作为精确工具加以利用。 引言 一,设计的题目:插床运动系统方案设计及其运动分析。 二,此设计是工科专业在学习《机械原理》后进行的一次较全面的综合设计训练,其目的: 1.巩固理论知识,并应用于解决实际工程问题; 2.建立机械传动系统方案设计、机构设计与分析概念; 3.进行计算、绘图、正确应用设计资料、手册、标准和规范以及使用经验数据的能力训练。 三,主要内容: 1.确定插床主要尺寸,然后按1:1的比例画出图形。对插刀进行运动分析,选取适当比例尺画出不同点速度,加速度矢量图得到不同点的速度,加速度,并对两处位移,作出位移,速度,加速度同转角的图像 2.在内容1运动分析的基础上作出运动循环图,在运动循环图的指导下,根据设计要求确定工作台进给运动机构传动方案设计(包括上下滑板1和2进给运动的机构传动方案设计;回转台3分度运动的机构传动方案设计;刀具与工作台在运动中的协调性分析;) 3.整理和编写说明书一份,对图纸进行详细说明 时间安排 (1).第一天 明确任务,准备作图工具,并打扫教室。 (2). 第二、三天 在老师的指导下确定构建尺寸,作出机构简图,并进行运动分析,并作出一个周期的位移、速度、加速度随转角变化的图像 (3). 第四、五天 在老师的指导下,完成工作台的机构传动方案设计,并画出传动示意图。 (4). 第六、七、八天 自己总结,整理并编写说明书一份 任务与分析 本课题主要的目的是为了检测步进电机步距角误差,并把误差进行分析计算,最终得到一份误差数据,用误差曲线的方式在坐标上面把误差和步数结果表现出来,方便日后对误差的分析、误差的减少讨论出相应的方案。