东北大学继续教育学院
现代机械设计理论与方法试卷(作业考核线下) B 卷(共 4 页)
一.选择题(可多选,每題2分,共20分)
1. 机械产品的设计规划阶段,应完成如下主要工作(A B )。
A) 产品的市场需求分析 B) 产品设计的可靠性报告 C) 产品的功能原理设计
D)产品的结构方案设计E)产品的装配草图绘制F)产品的零件图和其他技术文件
2. 以下有关机械系统特点的描述哪些是正确的( ABD )。
A) 整体性 B) 系统性 C) 独立性 D) 相关性
3. 机械产品的功能是对( BCE )进行传递和变换的程序、功效和能力的抽象化描述。
A) 机械流 B) 能量流 C) 物质流 D) 电流E)信息流F)控制流
4. 功能分解的结果有两种表达方式,其中,( B )在形式上比较简单、直观,可以清晰地表达各分功能的层次关系,而( A )则能够更充分地表达各分功能之间的相互配合关系。
A) 功能结构图 B) 功能树 C) 功能元 D)核心功能
5. 布置传动系统时,一般把带传动安排在传动链的(B )。
A) 低速端 B) 高速端
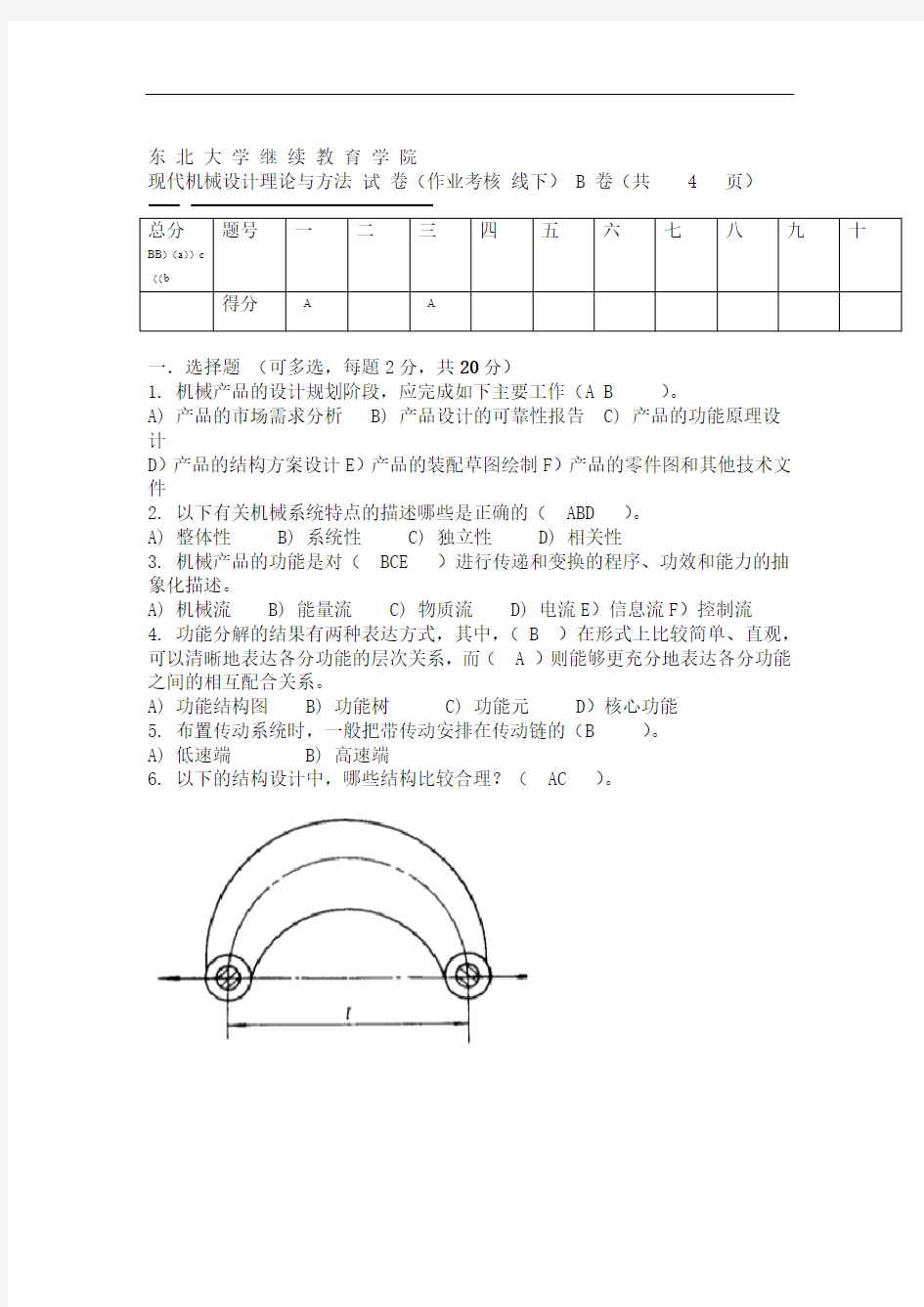
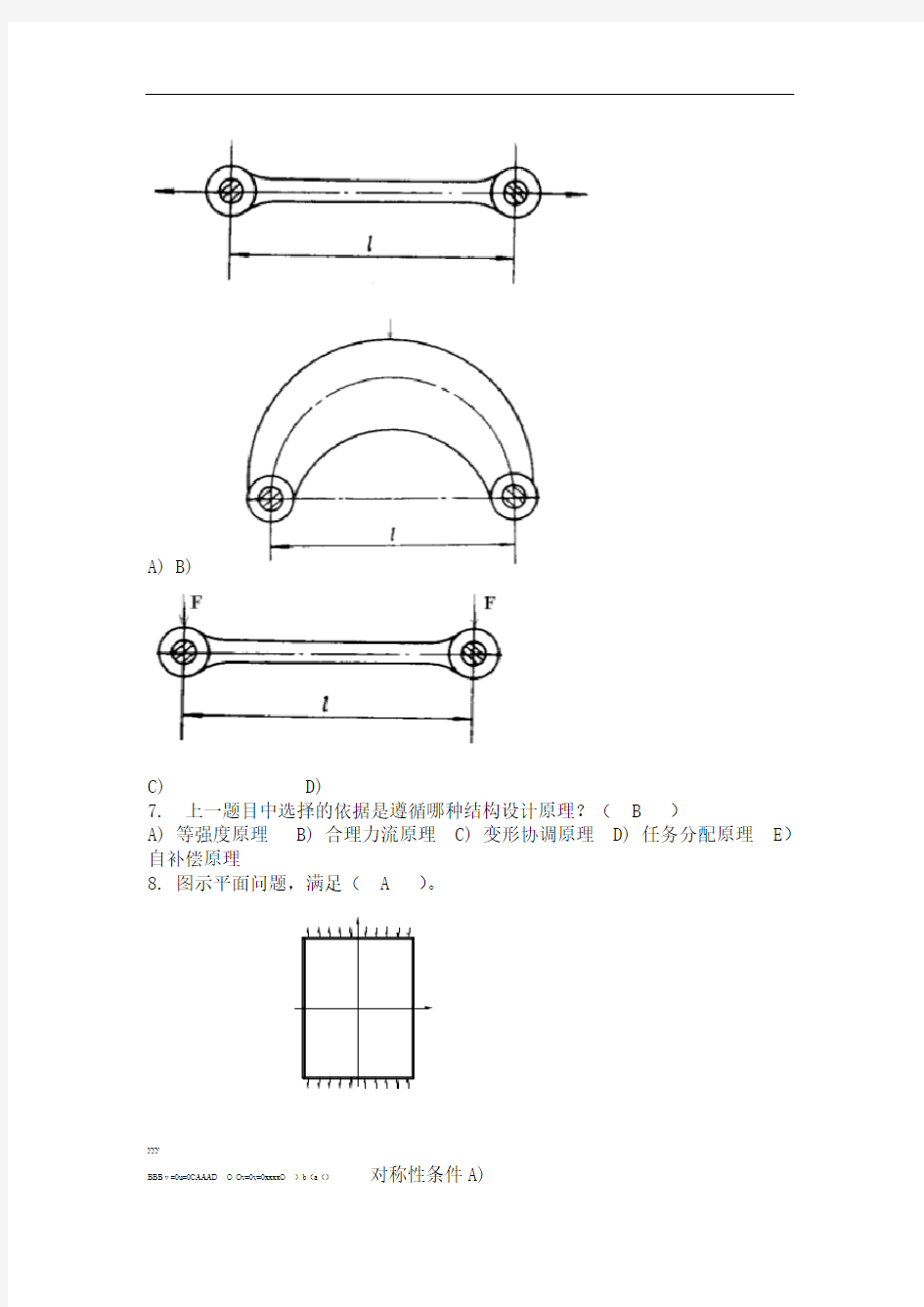
6. 以下的结构设计中,哪些结构比较合理?( AC )。
A) B)
C) D)
7. 上一题目中选择的依据是遵循哪种结构设计原理?( B )
A) 等强度原理 B) 合理力流原理 C) 变形协调原理 D) 任务分配原理 E)自补偿原理
8. 图示平面问题,满足( A )。
yyy
BBBv=0u=0CAAAD O Ov=0v=0xxxxO)b(a()对称性条件A)
B) 反对称性条件
9. 对(a)图所示的轴对称模型进行有限元分析时,必须施加约束支座以消除刚体位移。下面的(b)图和(c)中哪种约束是错误的?( B )
A) (b)图 B) (c)图
10. 将研究对象的各个部分、各个方面和各种因素联系起来加以考虑,从整体上把握事物的本质和规律,从而寻求新的创造的原理是( A )。
A) 综合创造原理 B) 分离创造原理 C) 移植创造原理
D) 物场分析原理 E) 还原创造原理 F) 价值优化原理
二.判断题:(正确:T;错误:F,各2分,共20分)
1. 机械产品的方案设计阶段就是要完成产品的原理方案设计。( F )
2. 一个机械系统必须由动力系统、执行系统、传动系统、操纵控制系统、架体支撑系统几部分组成。( F )
3. 机械设计学强调从功能的观点来看机器的组成,因为这更有利于和设计过程中的工作特点相协调。( T )
4. 总体布局设计一般先布置动力系统和传动系统,然后再布置执行系统等。( F )
5. 在设计机械时,一般需预先给定机械的工作载荷。该工作载荷可以由设计者自行确定,也可以由需求方提供。( T )
6. 执行构件的作用是传递和变换运动和动力。( F )
7. 三角形单元和矩形单元的每个节点均有两个位移自由度。( T )
8.结构离散化就是将复杂结构划分成通过节点相连的若干个单元。( T )
9. 设计变量的个数即为设计空间的维数。( T )
10. 并联系统的可靠度是各单元可靠度之和。( F )
三.简答题(各6分,共36分)
1. 机械设计具有哪些特点?
(1)多解性在许多情况下,一个设计方案不可能同时满足所有用户的要求,而能满足同一用户需求的设计方案一般来说也不止一个,因此设计具有多解性。
(2)系统性机械设计既要满足用户对产品技术性、经济性和社会性的追求,又必须满足各方面的约束条件,如加工和制造条件、使用和操作条件、保养和维修条件、运输条件等;机械设计还需考虑机械本身的系统性,
(3)创新性各种机械设计都是程度不同的创新活动。科技成果不断以产品形式转化为生产力,设计是实现这一转化的关键环节。每一个开发性设计都意味着有新的科技成果被应用,每一次产品的改进都是一次创新,设计过程体现了设计者的创造性劳动。
2. 进行原理方案构思时常用哪些方法?
(1)黑箱法利用对未知系统的外部观测,分析该系统与环境之间的输入和输出,通过输入和输出的转换关系确定系统的功能、特性所需具备的工作原理与内部结构,这种方法称为黑箱法。黑箱法要求设计者不要首先从产品结构着手,而应从系统的功能出发设计产品。
)列举法以现有功能类似的机械作对象,列举其优点,在新方案中保留;列举其缺2(.
点,以便避免;列举其不足(或不同)之处,以便作必要的补充。在继承基础上创新,可使新方案尽可能完善。
(3)移植法受其它事物(也许与本课题毫无直接关系的事物)的启迪,触发灵感,运用联想将其原理合理地应用到自己的课题上。
(4)筛选法
将有可能实现该功能要求的工作原理、工艺动作及实现该运动的基本机构和组合机构尽可能按层次罗列出来,进行排列组合;再按可行性、先进性、方便性、经济性逐个分析审查,淘汰不适合的。
在进行方案构思时,不论是总体方案还是某一部分的具体问题,都不单独使用某一种方法,这几种方法往往要综合应用,才能收到较好的效果。
3. 图示两种传动方案,假设各零件的参数和制造精度完全相同,试分析哪一种布局比较合理,说明理由。
(b)蜗杆–蜗杆传动减速a)齿轮–齿轮减速传动(题3图两种减速方案
和,齿轮传动比为若从精度上来分析,设齿轮副和蜗杆副的传动误差分别为
。得两个方案最后一级的传动总误差分别为:,蜗杆传动比为 2-3a所示方案的总误差,图
所示方案的总误差,图2-3b
接近相等,则,可见齿轮传动布置在高速级的传动精度较高。和若
但齿轮传动布置在高速级时噪声较大,且因小齿轮z往往不得不采用悬臂结构,使传动1性能和承载能力下降。同时,蜗杆传动的齿面相对滑动速度大,发热和胶合常为限制其承载能力的决定因素。故若蜗杆传动布置在低速级会增加其负载和总体结构尺寸,降低传动效率。
因此,对于以传递动力为主的传动系统,应优先考虑蜗杆布置在高速级的方案;对于以传递运动为主,尤其是要求传动精度较高的系统,才考虑蜗杆传动布置在低速级的方案。
机构运动循环图有哪三种表达形式?试绘图说明。4.
(1)直线式以一定比例的直线段表示运动循环各运动区段的时间,如图(a)所示。这种表示方法最简单,但直观性很差,且不能清楚地表示与其他机构动作间的相互关系。
(2)极坐标式将运动循环的各运动区段的时间及顺序按比例绘于圆形坐标上,如图(b)所示。此法直观性较强,尤其对于分配轴每转一周为一个机械工作循环者,有很多方便之处。但是,当执行机构太多时,需将所有执行机构的运动循环图分别用不同直径的同心圆环来表示,则看起来不很方便。
(3)直角坐标式以直角坐标表示各执行构件的各个运动区段的运动顺序及时间比例,同时还表示出执行构件的运动状态,如图(c)所示。此法直观性最强,比上述两种运动循环图更能反映执行机构运动循环的运动特征。
5. 常用的机械结构设计原理有哪些?
(1)等强度原理
(2)合理力流原理
(3)变形协调原理
(4)力平衡原理
(5)任务分配原理
(6)自补偿原理
(7)稳定性原理
6.说明应用有限元法解题的一般过程。
(1)问题及求解域定义
根据实际问题近似确定求解域的物理性质和几何区域,建立有限元计算模型。(2)连续体离散化
连续体离散化,习惯上称为有限元网格划分,即将连续体划分为有限个具有规则形状的微小块体,把每个微小块体称为单元,两相邻单元之间只通过若干点相互连接,每个连接点称为节点。为合理有效地表示连续体要选择好单元的类型、数目、大小和排列方式。
(3)单元分析
①选择位移模式
②分析单元的力学性质
③计算等效节点力
(4)组成物体的整体方程组
由已知的单元刚度矩阵和单元等效节点载荷列阵集成表示整个物体性质的结构刚度矩阵和结构载荷列阵,从而建立起整个结构已知量——总节点载荷与整个物体未知量——总节点位移的关系。得到系统的基本方程后,考虑其边界条件或初始条件,求解上述联立方程组。
(5)求解有限元方程和结果解释
求解上述联立方程组,求解结果是单元节点处状态变量的近似值。
3的平底、无盖的圆柱形容器,要求设计此容器消耗原材料8000cm四、某厂生产一个容积为
最少。
(1)试建立该优化问题的数学模型。(9分)
(2)试构造求解该优化数学模型的惩罚函数。(5分)
高为cm,cm,则这一优化问题的数学模型为设容器底面半径为
???0R.t755m?n?,试分别五、若在的串-并联系统与并-串联系统中,单元可靠度均为求出这两个系统的可靠度。(10分)
(1)对于串-并联系统,由式(3-25)得
(2)对于并-串联系统,由式(3-27)得