
400W台达B2伺服电机配枫信行星减速机怎样选型
【枫信减速机】400W伺服电机配个PS90或者是PS70 PLF系列的70减速机PLE80减速机具体情况就要看你那边对精度要求和工况来确定了,以上型号仅供参考
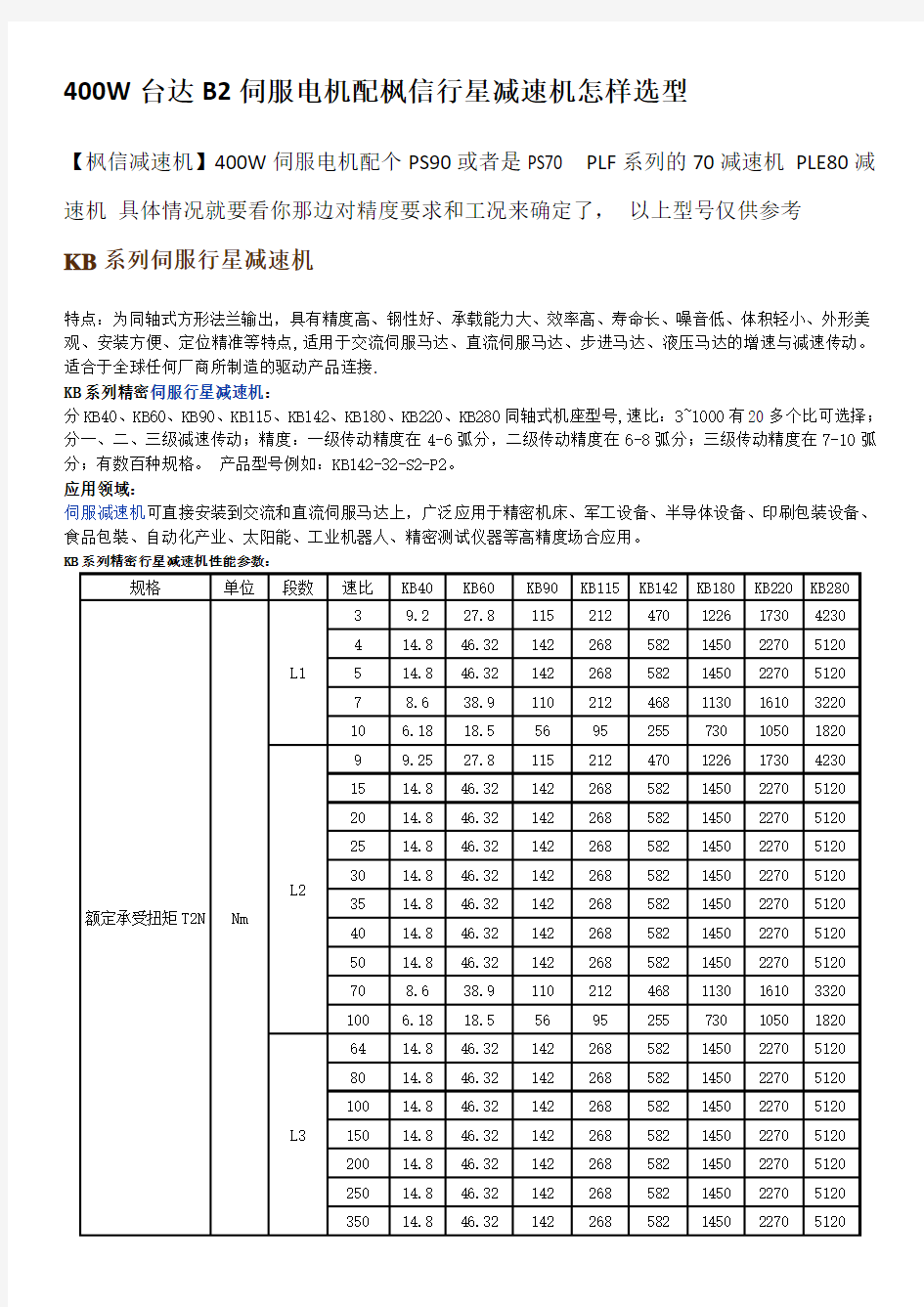
KB系列伺服行星减速机
特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。适合于全球任何厂商所制造的驱动产品连接.
KB系列精密伺服行星减速机:
分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。产品型号例如:KB142-32-S2-P2。
应用领域:
伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB系列精密行星减速机性能参数:
KB系列精密行星减速机转动惯量:
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)200W 70 4-M4 ф11(F7)35 ф50(H7) 5 64 126 145 164 400W 70 4-M4 ф14(F7)35 ф50(H7) 5 64 126 145 164
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)400W 70 4-M4 14F7 35 50(H7) 5 90 165 188 211
750W 90 4-M5 19F7 35 70(H7) 5 90 165 188 211 1000W 115 4-M8 19F7 55 95(H7) 5 130 185 208 231
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)750W 90 4-M6 19F7 55 70(H7) 10 130 203 235 259 1500W 145/130 4-M8 22/24F7 65 110(H7) 10 130 213 245 269 2000W 165 4-M10 32F7 65 130(H7) 10 150 233 265 389
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520
伺服电机计算选择应用实例 1. 选择电机时的计算条件 本节叙述水平运动伺服轴(见下图)的电机选择步骤。 例:工作台和工件的 W :运动部件(工作台及工件)的重量(kgf )=1000 kgf 机械规格 μ :滑动表面的摩擦系数=0.05 π :驱动系统(包括滚珠丝杠)的效率=0.9 fg :镶条锁紧力(kgf )=50 kgf Fc :由切削力引起的反推力(kgf )=100 kgf Fcf :由切削力矩引起的滑动表面上工作台受到的力(kgf ) =30kgf Z1/Z2: 变速比=1/1 例:进给丝杠的(滚珠 Db :轴径=32 mm 丝杠)的规格 Lb :轴长=1000 mm P :节距=8 mm 例:电机轴的运行规格 Ta :加速力矩(kgf.cm ) Vm :快速移动时的电机速度(mm -1)=3000 mm -1 ta :加速时间(s)=0.10 s Jm :电机的惯量(kgf.cm.sec 2) Jl :负载惯量(kgf.cm.sec 2) ks :伺服的位置回路增益(sec -1)=30 sec -1 1.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出: Tm = + Tf Tm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L :电机转一转机床的移动距离=P ×(Z1/Z2)=8 mm Tf :滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2Nm F ×L 2πη
无论是否在切削,是垂直轴还是水平轴,F值取决于工作台的重量, 摩擦系数。若坐标轴是垂直轴,F值还与平衡锤有关。对于水平工 作台,F值可按下列公式计算: 不切削时: F = μ(W+fg) 例如: F=0.05×(1000+50)=52.5 (kgf) Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm) = 0.9(Nm) 切削时: F = Fc+μ(W+fg+Fcf) 例如: F=100+0.05×(1000+50+30)=154(kgf) Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm) =2.1(Nm) 为了满足条件1,应根据数据单选择电机,其负载力矩在不切削时 应大于0.9(Nm),最高转速应高于3000(min-1)。考虑到加/减速, 可选择α2/3000(其静止时的额定转矩为2.0 Nm)。 ·注计算力矩时,要注意以下几点: 。考虑由镶条锁紧力(fg)引起的摩擦力矩 根据运动部件的重量和摩擦系数计算的力矩通常相当小。镶条 锁紧力和滑动表面的质量对力矩有很大影响。 。滚珠丝杠的轴承和螺母的预加负荷,丝杠的预应力及其它一些因 素有可能使得滚动接触的Fc相当大。小型和轻型机床其摩擦力矩 会大大影响电机的承受的力矩。 。考虑由切削力引起的滑动表面摩擦力(Fcf)的增加。切削力和驱 动力通常并不作用在一个公共点上如下图所示。当切削力很大时, 造成的力矩会增加滑动表面的负载。 当计算切削时的力矩时要考虑由负载引起的摩擦力矩。 。进给速度会使摩擦力矩变化很大。欲得到精确的摩擦力矩值,应 仔细研究速度变化,工作台支撑结构(滑动接触,滚动接触和静压 力等),滑动表面材料,润滑情况和其它因素对摩擦力的影响。 。机床的装配情况,环境温度,润滑状况对一台机床的摩擦力矩影 响也很大。大量搜集同一型号机床的数据可以较为精确的计算其负
台达ASD-B2伺服ECMA-C20401GS电机控制文档一.扭矩模式 1.说明:此扭矩模式是用于外部控制器控制输入给伺服器的电 压来实现电机扭矩大小的输出。 2.接线:将控制器控制的能输出可变电压的引脚直接连接到 CN1的18引脚,将控制器的GND与伺服器CN1的19脚连 接 3.参数设定: P2-15,P2-16,P2-17都设定为0,消除初始状态下AL013 的预警状态。 P1-01:03,将电机设定为转矩模式 P1-02:01,速度限制,电机在没有负载的情况下会转很快 P1-07:500,设置电机加减速的时间,减少通电与断电的时 对于轴与外设的冲击 P1-09=设定电机最高转速 P2-12:00,将TCM0设定为0 P2-13:00,将TCM1设定为0 P2-12与P2-13的作用是将扭矩的命令设定为外部电压来控 制。详情见数据手册144页6.4.1 P2-14:14,设定速度,当不设定此项时,电机只有力矩,没有 转速
P1-41:200,表示输入5V模拟电压,达到100%额定转矩 P2-10:01,启动电机 当此时电机不转时,重启伺服器即可。(建议重启) 要关闭电机则将P2-10设定为00,并保存,然后将开关关闭 并重启即可完成电机的关闭。 二.位置模式 1.说明:当前位置模式是通过外部控制器输出的PWM来控制 伺服电机的位置以及速度,其中PWM频率控制电机速度, PWM的个数与P1-44与P1-45的结合控制电机的具体位置。 使用的脉冲输入为开集极NPN设备输入,电源为内部24v 电源。 2.接线:
上图中的白线是控制器的脉冲输出线,用于输出PWM,蓝色线是控制板的GND的连接线,用于控制器与伺服器的共地作用。
西门子伺服电机选择手册,SINAMICS S120是一种集V/F、矢量控制和伺服控制于一体的新型驱动控制系统。普通异步电动机不能控制转矩,也不能控制三相异步电动机。 S120系列驱动与伺服电机选型手册第1部分:典型结构的多轴驱动控制单元电机模块与通用直流母线电源模块。带起动机(或scout)和SIMATIC manager软件或s7-300400的书本式柜式PC典型配置图,SIMOTION O/D/P 24 V DL说明:1:主控制模块cu320 2:电源模块SIM 或ALM+24 V电源3:单轴电机模块4:两轴电机模块234电源线终端模块驱动Cliq编码器反馈信号线选项板电抗器功率滤波器传感器模块无编码器电机运动控制,带drivc Cliq接口西门子(中国)自动化传动集团有限公司生产机械SINAMICS S120系列,选自《S120驱动与伺服电机选型手册》第1章多轴传动概述。Sinamics120是一种集V/F、矢量控制和伺服控制于一体的新型驱动控制系统。它不仅可以控制普通的三相异步电动机,还可以控制步进电动机、转矩电动机和直线电动机。其强大的定位功能将实现进给轴的绝对和相对定位。2007年6月发布的DCC(drive control chart)功能将实现逻辑、计算和简单处理功能。SINAMICS S120产品包括:用于普通直流母线的DCAC逆变器和用于单轴的ACAC逆变器。具有公共直流母
线的DC/AC逆变器也称为多轴驱动。它的结构是电源模块和机器模块分开。电源模块将三个交流电整流成540V或600DC,并将电机模块(一个或多个)连接到直流母线。特别适用于多轴控制,特别适用于造纸、包装、纺织、印刷、钢铁等行业。优点是电机轴间能量共享,接线方便简单●单轴控制交流变频器,俗称单轴交流传动,其结构是功率模块和电机模块的组合,特别适合单轴速度和定位控制。本书第一部分包括第1至4章,主要介绍多轴交流传动。第二部分包括第五章至第八章,主要介绍单轴交流传动。第三部分包括第九章,主要介绍电机电缆和信号电缆。第四部分包括第10章,介绍了同步和异步伺服电机的指令数据。第五部分,包括第11章,简要介绍了运动控制系统的指令数据。这本书中的技术资料基本上是英文的。详情请参阅英文原文。西门子(中国)有限公司自动化与传动集团运动控制部生产的机械系列S120系列,源自《S120驱动与伺服电机选型手册》第二章。功率模块是我们通常所说的整流器或整流器/反馈单元。它将三相交流电整流成直流电,并为每个抑制模块(通常称为逆变器)供电。具有反馈功能的模块还可以向电网提供直流电。根据是否有反馈功能和反馈方式,将功率模块分为以下三类:基本线路模块:整流单元,但无反馈功能。智
目录 第一章概述 (1) 第二章要求分析 (2) (一)原始数据 (2) (二)系统组成框图 (2) 第三章方案拟定 (4) 第四章传动系统的方案设计 (5) 传动方案的分析与拟定 (5) 1.对传动方案的要求 (5) 2.拟定传动方案 (5) 第五章行星齿轮传动设计 (6) (一)行星齿轮传动比和效率计算 (6) (二)行星齿轮传动的配齿计算 (6) 1.传动比条件 (6) 2.同轴条件 (6) 3.装配条件 (7) 4.邻接条件 (7) (三)行星齿轮传动的几何尺寸和啮合参数计算 (8) (四)行星齿轮传动强度计算及校核 (10) 1、行星齿轮弯曲强度计算及校核 (10) 2、齿轮齿面强度的计算及校核 (11) 3、有关系数和接触疲劳极限 (11) (五)行星齿轮传动的受力分析 (13) (六)行星齿轮传动的均载机构及浮动量 (15) (七)轮间载荷分布均匀的措施 (15) 第六章行星轮架与输出轴间齿轮传动的设计 (17) (一)选择齿轮材料及精度等级 (17) (二)按齿面接触疲劳强度设 (17) (三)按齿根弯曲疲劳强度计算 (18) (四)主要尺寸计算 (18)
(五)验算齿轮的圆周速度v (18) 第七章行星轮系减速器齿轮输入输出轴的设计 (19) (一)减速器输入轴的设计 (19) 1、选择轴的材料,确定许用应力 (19) 2、按扭转强度估算轴径 (19) 3、确定各轴段的直径 (19) 4、确定各轴段的长度 (19) 5、校核轴 (19) (二)行星轮系减速器齿轮输出轴的设计 (21) 1、选择轴的材料,确定许用应力 (21) 2、按扭转强度估算轴径 (21) 3、确定各轴段的直径 (21) 4、确定各轴段的长度 (21) 5、校核轴 (22)
台达伺服调机步骤简易说明书 本调机步骤简易说明书主要就配线及调试做一简易说明,因客户使用情况各异,此说明书只做一个调试流程的大概说明,具体细节部分请依实际要求调整。 一:检查确定伺服驱动器及电机是否为所需型号;注意安装环境。(祥见操作手册) 二:配线 (1)周边装置接线图
(2)信号与配线 请根据您所需的控制模式和具体要求功能来配线,不同控制模式的配线是不同的,具体请参照手册3-23至3-26页说明。但请注意, 1.无论是什么控制模式,伺服驱动器均需DC24V电源,您可以让驱动器自已供给此电源(PIN17脚VDD与PIN11脚COM+短接);也可以外加POWER 供电(+24接伺服驱动器PIN11脚COM+,GND接伺服的PIN45,47,49 脚COM-); 2.驱动器均需SERVO ON,如参数没有变动,PIN9脚DI1 SON 信号需导通。您可以根据您的需要让PIN9与PIN45等常时短接或用个开关量来控制它的ON-OFF; 3.如果您没有用到CW,CCW禁止极限和外加急停按扭,则请把PIN 32,PIN31 ,PIN30与PIN45等COM-脚短路。 (3)编码器接线 1.編碼器引出線連接頭規格: 線材選擇請使用附隔離網線的多芯双绞線,而隔離網線要確實與SHIELD端相連接!
2.CN2接头定义: CN2連接器(公)背面接線端 各信號的意義說明如下: 三:参数调整 A . 参数1-01:此参数为控制模式及控制指令输入源设定。请根据您所用的控制模式来 设定。如为位置模式,且指令由端子输入,则请设为00;如为速度模式,则请 设为02。具体设定请见下表: B . 参数1-00: 当您选用位置控制模式且由端子输入指令时(当参数1-01设为00时),此参数才需设 定,其功能为外部脉冲输入型式设定。 Z Y X X 值設定:脈沖型式 其中X=0:AB 相脈沖列(4x ); X=1:正轉脈沖列及逆轉脈沖列(CW CCW 型式)
Type U301.20.30.94Nm 1.18Nm 2000Rpm 2500Rpm 0.45A 0.57A 0.20Kw 2.30Nm/A 139V/Krpm 133Hz 118.34Ohm 120.80mH -V 370V 0.13mkgm2 2.2kg 2.9kg U301.60.30.95Nm 1.39Nm 6000Rpm 7400Rpm 1.30A 2.00A 0.60Kw 0.48Nm/A 29V/Krpm 400Hz 10.17Ohm 14.53mH -V 372V 0.13mkgm2 2.2kg 2.9kg U302.20.3 2.00Nm 2.48Nm 2000Rpm 2500Rpm 0.98A 1.19A 0.42Kw 2.30Nm/A 139V/Krpm 133Hz 41.30Ohm 59.20mH -V 371V 0.194mkgm2 2.7kg 3.4kg U302.50.3 2.00Nm 2.60Nm 5000Rpm 6000Rpm 2.00A 2.60A 1.05Kw 1.09Nm/A 66V/Krpm 333Hz 8.51Ohm 14.55mH -V 333V 0.194mkgm2 2.7kg 3.4kg U304.10.3 3.90Nm 3.95Nm 1000Rpm 1500Rpm 1.00A 1.10A 0.41Kw 3.95Nm/A 239V/Krpm 67Hz 87.44Ohm 120.36mH -V 380V 0.156mkgm2 4.5kg 5.2kg U304.20.3 4.18Nm 4.91Nm 2000Rpm 2500Rpm 2.00A 2.36A 0.88Kw 2.29Nm/A 139V/Krpm 133Hz 15.85Ohm 29.58mH -V 371V 0.156mkgm2 4.5kg 5.2kg U304.50.2 3.95Nm 4.00Nm 5000Rpm 7500Rpm 10.00A 10.00A 2.07Kw 0.43Nm/A 26V/Krpm 333Hz 0.48Ohm 1.40mH 201V -V 0.156mkgm2 4.5kg 5.2kg U304.50.3 3.95Nm 4.00Nm 5000Rpm 7500Rpm 5.50A 6.10A 2.07Kw 0.73Nm/A 44V/Krpm 333Hz 1.40Ohm 4.10mH -V 344V 0.156mkgm2 4.5kg 5.2kg U503.20.3 3.80Nm 4.42Nm 2000Rpm 2628Rpm 1.65A 1.80A 0.80Kw 2.28Nm/A 138V/Krpm 133Hz 16.88Ohm 63.67mH -V 338V 0.97mkgm2 4.8kg 5.8kg U503.30.3 3.00Nm 3.50Nm 3000Rpm 3200Rpm 2.20A 2.56A 0.94Kw 1.36Nm/A 82V/Krpm 200Hz 7.01Ohm 31.60mH -V 374V 0.97mkgm2 4.8kg 5.8kg U503.40.3 2.80Nm 3.50Nm 4000Rpm 6000Rpm 3.20A 4.30A 1.17Kw 0.93Nm/A 56V/Krpm 267Hz 3.30Ohm 9.00mH -V 375V 0.97mkgm2 4.8kg 5.8kg U503.50.3 2.00Nm 3.50Nm 5000Rpm 5200Rpm 2.20A 3.80A 1.05Kw 1.00Nm/A 61V/Krpm 333Hz 3.14Ohm 14.30mH -V 376V 0.97mkgm2 4.8kg 5.8kg U505.20.3 5.08Nm 5.30Nm 1500Rpm 2244Rpm 2.00A 2.10A 0.80Kw 2.71Nm/A 164V/Krpm 133Hz 13.96Ohm 56.43mH -V 295V 1.13mkgm2 5.7kg 6.7kg U505.30.2 3.50Nm 5.00Nm 3000Rpm 4000Rpm 6.00A 7.00A 1.10Kw 0.65Nm/A 39V/Krpm 200Hz 0.97Ohm 2.94mH 170V -V 1.13mkgm2 5.7kg 6.7kg U505.40.3 4.00Nm 5.52Nm 4000Rpm 4800Rpm 4.20A 4.30A 1.68Kw 1.36Nm/A 82V/Krpm 267Hz 3.65Ohm 14.05mH -V 372V 1.13mkgm2 5.7kg 6.7kg U506.20.3 6.44Nm 7.34Nm 2000Rpm 2568Rpm 2.90A 3.30A 1.35Kw 2.32Nm/A 141V/Krpm 133Hz 6.92Ohm 31.04mH -V 322V 1.13mkgm2 6.8kg 7.8kg U506.20.2 5.70Nm 7.62Nm 2000Rpm 2500Rpm 4.40A 5.87A 1.19Kw 1.36Nm/A 82V/Krpm 133Hz 2.12Ohm 9.68mH 180V -V 1.13mkgm2 6.8kg 7.8kg U506.30.3 5.50Nm 6.63Nm 3000Rpm 3200Rpm 3.53A 4.24A 1.73Kw 1.56Nm/A 94V/Krpm 200Hz 3.37Ohm 20.60mH -V 349V 1.13mkgm2 6.8kg 7.8kg U506.30.2 5.80Nm 7.62Nm 3000Rpm 4000Rpm 8.53A 13.96A 1.82Kw 0.68Nm/A 41V/Krpm 200Hz 0.65Ohm 2.42mH 175V -V 1.13mkgm2 6.8kg 7.8kg U506.40.3 4.50Nm 5.87Nm 4000Rpm 5000Rpm 3.20A 4.80A 1.88Kw 1.29Nm/A 78V/Krpm 267Hz 2.25Ohm 9.79mH -V 375V 1.13mkgm2 6.8kg 7.8kg U509.30.2 6.60Nm 9.20Nm 3000Rpm 4000Rpm 8.50A 12.40A 2.07Kw 0.85Nm/A 51V/Krpm 200Hz 0.54Ohm 2.03mH 211V -V 1.33mkgm28.8kg 9.8kg U509.20.39.16Nm 10.40Nm 2000Rpm 2378Rpm 3.70A 4.05A 1.92Kw 2.55Nm/A 154V/Krpm 133Hz 4.83Ohm 25.77mH -V 346V 1.33mkgm28.8kg 9.8kg U509.40.3 6.00Nm 9.98Nm 4000Rpm 4200Rpm 4.00A 8.00A 2.51Kw 1.28Nm/A 77V/Krpm 267Hz 1.12Ohm 7.74mH -V 378V 1.33mkgm28.8kg 9.8kg U512.20.311.24Nm 13.18Nm 2000Rpm 2473Rpm 4.80A 5.50A 2.35Kw 2.52Nm/A 153V/Krpm 133Hz 2.97Ohm 17.29mH -V 334V 1.42mkgm210.8kg 11.8kg U512.40.3 6.00Nm 12.84Nm 2500Rpm 4500Rpm 5.00A 11.00A 1.57Kw 1.22Nm/A 74V/Krpm 267Hz 0.80Ohm 5.27mH -V 378V 1.42mkgm210.8kg 11.8kg U710.10.3 6.40Nm 7.80Nm 1000Rpm 1500Rpm 1.50A 1.90A 0.67Kw 4.33Nm/A 262.08V/Krpm 67Hz 18.90Ohm 90.20mH -V 373V 0.73mkgm28.5kg 11.5kg U710.40.39.60Nm 10.50Nm 4000Rpm 4100Rpm 6.70A 6.70A 4.02Kw 1.58Nm/A 95.63V/Krpm 267Hz 1.99Ohm 10.73mH -V 391V 0.73mkgm28.5kg 11.5kg U710.50.3 5.89Nm 8.98Nm 5175Rpm 5300Rpm 5.35A 8.60A 3.19Kw 1.10Nm/A 66.58V/Krpm 333Hz 1.03Ohm 8.10mH -V 375V 0.73mkgm28.5kg 11.5kg U715.35.312.35Nm 12.74Nm 3500Rpm 5000Rpm 7.10A 7.70A 4.53Kw 1.74Nm/A 105.32V/Krpm 233Hz 1.38Ohm 12.08mH -V 394V 1.0mkgm210.2kg 13.2kg U715.50.2 6.00Nm 12.00Nm 4500Rpm 5000Rpm 10.00A 21.60A 2.83Kw 0.62Nm/A 37.53V/Krpm 333Hz 0.14Ohm 1.53mH 174V -V 1.0mkgm210.2kg 13.2kg U720.05.316.80Nm 18.40Nm 500Rpm 800Rpm 2.00A 2.20A 0.88Kw 9.20Nm/A 556.85V/Krpm 33Hz 26.90Ohm 193.60mH -V 330V 1.3mkgm211.9kg 14.9kg U720.15.317.00Nm 19.00Nm 1500Rpm 1800Rpm 5.73A 6.44A 2.67Kw 3.29Nm/A 199.13V/Krpm 100Hz 2.88Ohm 31.24mH -V 371V 1.3mkgm211.9kg 14.9kg U720.20.311.70Nm 16.00Nm 2000Rpm 2500Rpm 5.09A 6.61A 2.45Kw 2.53Nm/A 153.13V/Krpm 133Hz 2.33Ohm 14.88mH -V 322V 1.3mkgm211.9kg 14.9kg U720.30.216.00Nm 19.00Nm 3000Rpm 4000Rpm 16.50A 20.67A 5.03Kw 0.99Nm/A 59.92V/Krpm 200Hz 0.36Ohm 3.96mH 204V -V 1.3mkgm211.9kg 14.9kg U720.30.316.80Nm 16.80Nm 3000Rpm 3700Rpm 11.80A 11.80A 5.28Kw 1.59Nm/A 95.94V/Krpm 200Hz 0.67Ohm 5.70mH -V 291V 1.3mkgm211.9kg 14.9kg U720.40.312.40Nm 17.79Nm 4000Rpm 4800Rpm 10.50A 15.19A 5.19Kw 1.28Nm/A 77.47V/Krpm 267Hz 0.55Ohm 3.90mH -V 319V 1.3mkgm213.6kg 16.6kg U725.50.214.00Nm 23.16Nm 4500Rpm 5000Rpm 20.00A 37.95A 6.60Kw 0.67Nm/A 40.55V/Krpm 333Hz 0.08Ohm 1.03mH 176V -V 1.6mkgm213.6kg 16.6kg U730.15.322.00Nm 23.80Nm 1500Rpm 2000Rpm 7.50A 8.00A 3.46Kw 3.22Nm/A 194.90V/Krpm 100Hz 2.00Ohm 20.06mH -V 317V 1.9mkgm215.2kg 18.2kg U730.20.322.00Nm 23.00Nm 2000Rpm 2150Rpm 8.50A 9.70A 4.61Kw 2.65Nm/A 160.40V/Krpm 133Hz 2.00Ohm 23.20mH -V 345V 1.9mkgm215.2kg 18.2kg U730.30.316.90Nm 26.60Nm 3000Rpm 3200Rpm 11.60A 18.90A 5.31Kw 1.52Nm/A 92.00V/Krpm 200Hz 0.38Ohm 3.50mH -V 287V 1.9mkgm215.2kg 18.2kg U740.05.324.00Nm 42.00Nm 500Rpm 800Rpm 2.50A 5.23A 1.26Kw 9.00Nm/A 544.74V/Krpm 33Hz 10.30Ohm 96.50mH -V 314V 2.4mkgm218.5kg 21.5kg U740.20.324.00Nm 34.00Nm 2000Rpm 2180Rpm 7.08A 13.48A 5.03Kw 2.72Nm/A 164.63V/Krpm 133Hz 0.80Ohm 8.04mH -V 327V 2.4mkgm218.5kg 21.5kg U740.30.321.80Nm 33.00Nm 3000Rpm 3200Rpm 14.00A 21.70A 6.85Kw 1.63Nm/A 98.66V/Krpm 200Hz 0.29Ohm 3.00mH -V 304V 2.4mkgm218.5kg 21.5kg We reserve the right to make technical changes. ULTRACT III Stand-still Weight (without Nominal Inductance Max Nominal Torque power Frequency Constant still speed torque brake)phase Weight (with brake)current Winding Stand-Back EMF between Nominal torque Nominal current Nominal speed Winding Resistance Rotor Inertia 400VAC Nominal Voltage (Supply Voltage)230VAC
电机的选择: (1)电机扭矩的计算 负载扭矩是由于驱动系统的摩擦力和切削力所引起的可用下式表达: FL M =π2 式中 M-----电动机轴转距; F------使机械部件沿直线方向移动所需的力; L------电动机转一圈(2πrad )时,机械移动的距离 2πM 是电动机以扭矩M 转一圈时电动机所作的功,而FL 是以F 力机械移动L 距离时所需的机械功。 实际机床上,由于存在传动效率和摩擦系数因素,滚珠丝杠克服外部载荷P 做等速运动所需力矩,应按下式计算: z z M h h F M B sp SP ao P K 2 11122? ??? ??++=η ππ M 1-----等速运动时的驱动力矩(N.mm) π 2h F sp ao K ---双螺母滚珠丝杠的预紧力矩(N.mm) F ao ------预紧力(N),通常预紧力取最大轴向工作载荷 F max 的1/3,即 F ao = 3 1 F max 当F max 难于计算时,可采用F ao =(0.1~0.12))(N C a ; C a -----滚珠丝杠副的额定载荷,产品样本中可查: h sp -----丝杠导程(mm); K--------滚珠丝杠预紧力矩系数,取0.1~0.2; P---------加在丝杠轴向的外部载荷(N),W F P μ+=; F---------作用于丝杠轴向的切削力(N); W--------法向载荷(N),P W W 11+=; W 1-----移动部件重力(N),包括最大承载重力; P 1 -------有夹板夹持时(如主轴箱)的夹板夹持力; μ --------导轨摩擦系数,粘贴聚四氟乙烯板的滑动导轨副09.0=μ,有润滑条件时,05.0~03.0=μ,直线滚动导轨004.0~003.0=μ; η1 -------滚珠丝杠的效率,取0.90~0.95; M B ----支撑轴承的摩擦力矩,即叫启动力矩(N.m),可以从滚珠丝杠专用轴承样本中得到,见表2-6(这里注意,双支撑轴承有M B 之和的问题) z 1 --------齿轮1的齿数 z 2 --------齿轮2的齿数 最后按满足下式的条件选择伺服电机 M M s ≤1 M s -----伺服电机的额定转距
关于伺服电机与步进电机性能比较及选型的计算方法 内容来源于 https://www.doczj.com/doc/cf3853395.html,/%C5%C9%BF%CB%D6%B1%C1%F7%B5%F7%CB%D9%C6%F7/blog/i tem/61656f385baf28de7c1e7129.html 步进电机作为一种开环控制的系统,和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。 1、伺服电机和步进电机的性能比较 步进电机作为一种开环控制的系统,和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。现就二者的使用性能作一比较。 一、控制精度不同 两相混合式步进电机步距角一般为 1.8°、0.9°,五相混合式步进电机步距角一般为0.72°、0.36°。也有一些高性能的步进电机通过细分后步距角更小。如山洋公司(S A N Y O D E N K I)生产的二相混合式步进电机其步距角可通过拨码开关设置为 1.8°、0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合式步进电机的步距角。 交流伺服电机的控制精度由电机轴后端的旋转编码器保证。以全数字式交流伺服电机为例,对于带标准2000线编码器的电机而言,由于驱动器内部采用了四倍频技术,其脉冲当量为360°/8000=0.045°。对于带17位编码器的电机而言,驱动器每接收131072个脉冲电机转一圈,即其脉冲当量为360°/131072 =0.0027466°,是步距角为 1.8°的步进电机的脉冲当量的1/655。 二、低频特性不同 步进电机在低速时易出现低频振动现象。振动频率与负载情况和驱动器性能有关,一般认为振动频率为电机空载起跳频率的一半。这种由步进电机的工作原理所决定的低频振动现象对于机器的正常运转非常不利。当步进电机工作在低速时,一般应采用阻尼技术来克服低频振动现象,比如在电机上加阻尼器,或驱动器上采用细分技术等。
行星齿轮减速机构成及意义、特点 行星减速机主要传动结构为:行星轮,太阳轮,外齿圈. 行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速. 相对其他减速机,行星减速机具有高刚性,高精度(单级可做到1分以内),高传动效率(单级在97%-98%),高的扭矩/体积比,终身免维护等特点. 因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量. 减速机额定输入转速最高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可做到10000Nm以上.工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度. 行星减速机的几个概念: 级数:行星齿轮的套数.由于一套星星齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降. 回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙. 行星减速机是一种用途广泛的工业产品,其性能可与其它军品级减速机产品相媲美,却有着工业级产品的价格,被应用于广泛的工业场合。
该减速器体积小、重量轻,承载能力高,使用寿命长、运转平稳,噪声低。具有功率分流、多齿啮合独用的特性。最大输入功率可达104kW。适用于起重运输、工程机械、冶金、矿山、石油化工、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器和航空航天等工业部门行星系列新品种WGN定轴传动减速器、WN 子母齿轮传动减速器、弹性均载少齿差减速器。 行星减速机是一种具有广泛通用性的新性减速机,内部齿轮采用20CvMnT渗碳淬火和磨齿。整机具有结构尺寸小,输出扭矩大,速比在、效率高、性能安全可靠等特点。本机主要用于塔式起重机的回转机构,又可作为配套部件用于起重、挖掘、运输、建筑等行业。 行星减速机产品特点: 行星齿轮减速机重量轻、体积小、传动比范围大、效率高、运转平稳、噪声低适应性强等特点。减速机广泛应用于冶金、矿山、起重运输、电力、能源、建筑建材、轻工、交通等工业部门。 产品说明: 1、P系列行星齿轮减速机采用模块化设计,可根据客户要求进行变化组合, 2、减速机采用渐开线行星齿轮传动,合理利用内、外啮合、功率分流, 3、箱体采用球墨铸铁,大大提高了箱体的钢性及抗震性, 4、齿轮均采用渗碳淬火处理,得到高硬耐磨表面,齿轮热处理后全部磨齿,降低了噪音,提高了整机的效率和使用寿命。 5、行星减速机P系列产品有9-34型规格,行星传动级数有2级和3级。 减速比:
ASDA-A2的 PUU 單位的意義?如何使用? 所謂的PUU (Pulse of User Unit)使用者單位,為一個經過電子齒輪比的使用者單位,這樣的設計,可以讓使用者不必自行轉換外部實際物理Encoder 回授量與電子齒輪間的關係。例如:ASDA-A2的encoder ,每轉一圏,物理量將回授1280000個脈波,如果想要改變馬逹走一圏時的回授脈波數,例如100000個脈波當作一圏,則可以設P1-44(N) =128;P1-45(M) =10,當馬逹轉完一圏時,ASDA-A2會收到100000個脈波,這個經過電子齒輪比運算的100000,其單位即為PUU ,如果要在控制器內部下逹馬逹走兩圏的命令時,只需根據所定義的PUU 下200000個PUU 命令,控制器內部會自動換回其實際的物理量,這個用法很直覺,下圖為其運算原理。 一般一直認為同樣的負載、同樣的慣量(切刀伺服),使用同等轉速的2kW 馬達,慣量比大的馬達應該只有好處沒有壞處,但事實上在實驗過程中發現:切刀驅動不換,原來使用130框號, 2kW 的馬達,負載率約120 ~ 140%,負載慣量比1%的馬達總是過熱,因此當嘗試將馬達更換為180框號, 2kW ,結果換上去後發現速度只要開到800r/min ,就會發生ALE02(過電壓)或ALE05(回生異常)警示。兩台馬達的扭力是一樣的,但是原來使用130框號, 2kW 的馬達,當轉速達到1200r/min 才會達到極限。 從這個例子來看,並不是馬達慣量越大越好,那麼請問在那些應用場合下慣量比發揮的作用影響大,那些應用場合下扭力的影響大? 1. 並不是高慣量就一定好,低慣量就一定差,要看其應用場合。 T= I x α (扭力 = 慣量 x 角加速度) P= T x ω (功率 = 扭力 x 角速度) P = I x α x ω 所以,同樣的功率之下,若慣量提升,加速度必下降,即加減速的特性變差了,當然,角速度也會相對變化,在此我們先假設其運轉速度不變。 I 是固定的,當一個系統設定好後 (如飛刀系統,因為飛刀不變,但如果用於輸送帶,慣量則會變,當輸送帶上的物品變多時,
ST系列交流伺服电机型号编号说明 1: 表示电机外径,单位:mm。 2:表示电机是正弦波驱动的永磁同步交流伺服电机。 3:表示电机安装的反馈元件,M—光电编码器,X—旋转变压器。 4:表示电机零速转矩,其值为三位数×,单位:Nm。 5:表示电机额定转速,其值为二位数×100,单位:rpm。 6:表示电机适配的驱动器工作电压,L—AC220V,H—AC380V。 7:表示反馈元件的规格,F—复合式增量光电编码器(2500 C/T),R—1对极旋转变压器。 8:表示电机类型,B—基本型。 9:表示电机安装了失电制动器。 SD系列交流伺服驱动器型号编号说明 1:表示采用空间矢量调制方式(SVPWM)的交流伺服驱动器 2:表示IPM模块的额定电流(15/20/30/50/75A) 3:表示功能代码(M:数字量与模拟量兼容) ●交流伺服电机与伺服驱动器适配表 ST系列电机主要参数 适配驱动器 ST系列电机ST系列电机 电机型号额定转矩: 额定转速 额定功率外形尺寸零售价(元) 110ST-M02030 2 Nm3000rpm SD15M SD20MN SD30MN SD50MN SD75MN 】 110×110×158 1500 110ST-M04030 4 Nm3000rpm110×110×1851700 110ST-M05030@ 5 Nm 3000rpm110×110×2001800 110ST-M06020 6 Nm2000rpm110×110×2171900 110ST-M06030 6 Nm3000rpm110×110×2171900 & 130ST-M04025 4 Nm2500rpm130×130×1631800 130ST-M0502 5 5 Nm2500rpm< 130×130×1712100 130ST-M06025 6 Nm2500rpm130×130×181( 2400
行星减速机知识 行星减速机:主要传动结构为:行星轮,太阳轮,外齿圈.行星轮减速其实就是齿轮减速的原理,它有一个轴线位置固定的齿轮叫中心轮或太阳轮,在太阳轮边上有轴线变动的齿轮,即既作自转又作公转的齿轮叫行星轮,行星轮有支持构件叫行星架,通过行星架将动力传到轴上,再传给其它齿轮.它们由一组若干个齿轮组成一个轮系.只有一个原动件,这种周转轮系称为行星轮系. 行星减速机常用术语 级数:行星齿轮的套数.由于一套星星齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降. 回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙. 行星减速机工作原理 1)齿圈固定,太阳轮主动,行星架被动。 从演示中可以看出,此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。 从演示中可以看出,此种组合为升速传动,传动比一般为0.2~0.4,转向相同。 3)太阳轮固定,齿圈主动,行星架被动。
从演示中可以看出,此种组合为降速传动,传动比一般为1.25~1.67,转向相同。 4)太阳轮固定,行星架主动,齿圈被动。 从演示中可以看出,此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。 从演示中可以看出此种组合为降速传动,传动比一般为1.5~4,转向相反。 6)行星架固定,齿圈主动,太阳轮被动。 从演示中可以看出此种组合为升速传动,传动比一般为0.25~0.67,转向相反。
台达ASD-A2系列常用型号 系列功率型号详情 ASDA-A2 100W ASD-A2-0121-L A2 100W基础型全闭环 ASDA-A2 100W ECMA-C10401GS 带油封带键槽 ASDA-A2 100W ECMA-C10401HS 键槽油封刹车 ASDA-A2 200W ASD-A2-0221-L A2 200W基础型全闭环 ASDA-A2 200W ECMA-C10602RS 带键槽带中心螺纹孔油封 ASDA-A2 200W ECMA-C10602SS 带键槽带中心螺纹孔油封刹车 ASDA-A2 400W ASD-A2-0421-L A2 400W基础型全闭环 ASDA-A2 400W ECMA-C10604RS 带键槽带中心螺纹孔油封 ASDA-A2 400W ECMA-C10604SS 带键槽带中心螺纹孔油封刹车 ASDA-A2 400W ECMA-E11305RS A2 500W 带键槽带中心螺纹孔油封 ASDA-A2 400W ECMA-E11305SS A2 500W 带键槽带中心螺纹孔油封刹车 ASDA-A2 400W ECMA-G11303RS A2 300W 带键槽带中心螺纹孔油封 ASDA-A2 400W ECMA-G11303SS A2 300W 带键槽带中心螺纹孔油封刹车 ASDA-A2 400W ECMA-C10804R7 A2 400W 带键槽带中心螺纹孔油封80框 ASDA-A2 400W ECMA-C10804S7 A2 400W 带键槽带中心螺纹孔油封刹车80框ASDA-A2 750W ASD-A2-0721-L A2 750W基础型全闭环 ASDA-A2 750W ECMA-C10807RS 带键槽带中心螺纹孔油封 ASDA-A2 750W ECMA-C10807SS 带键槽带中心螺纹孔油封刹车 ASDA-A2 750W ECMA-G11306RS 带键槽带中心螺纹孔油封 ASDA-A2 750W ECMA-G11306SS 带键槽带中心螺纹孔油封刹车 ASDA-A2 1KW ASD-A2-1021-L A2 1KW基础型全闭环 ASDA-A2 1KW ECMA-C10910RS 低惯量,1KW,键槽,86框号,油封 ASDA-A2 1KW ECMA-C11010RS 1KW 带键槽带中心螺纹孔油封轻惯量 ASDA-A2 1KW ECMA-C11010SS 1KW 带键槽带中心螺纹孔油封刹车轻惯量 ASDA-A2 1KW ECMA-E11310RS 1KW 带键槽带中心螺纹孔油封 ASDA-A2 1KW ECMA-E11310SS 1KW 带键槽带中心螺纹孔油封刹车 ASDA-A2 1KW ECMA-G11309RS A2 900W 带键槽带中心螺纹孔油封 ASDA-A2 1KW ECMA-G11309SS A2 900W 带键槽带中心螺纹孔油封刹车 需要采购变频器PLC伺服电机人机界面就联系常州耀德机电,我们将为您提供最优质的产品和周到快捷的服务,如需要安装调试电话联系0519-********,我们期待与您合作!ASDA-A2 1.5KW ASD-A2-1521-L A2 1.5KW基础型全闭环 ASDA-A2 1.5KW ECMA-E11315RS A2 1.5KW 带键槽带中心螺纹孔油封 ASDA-A2 1.5KW ECMA-E11315SS A2 1.5KW 带键槽带中心螺纹孔油封刹车 ASDA-A2 2KW ASD-A2-2023-L A2 2KW基础型全闭环 ASDA-A2 2KW ECMA-C11020RS A2 2KW 带键槽带中心螺纹孔油封轻惯量 ASDA-A2 2KW ECMA-C11020SS A2 2KW 带键槽带中心螺纹孔油封刹车轻惯量 ASDA-A2 2KW ECMA-E11320RS A2 2KW 带键槽带中心螺纹孔油封 ASDA-A2 2KW ECMA-E11320SS A2 2KW 带键槽带中心螺纹孔油封刹车 ASDA-A2 2KW ECMA-E11820RS A2 2KW 带键槽带中心螺纹孔油封180框 ASDA-A2 2KW ECMA-E11820SS A2 2KW 带键槽带中心螺纹孔油封刹车180框 ASDA-A2 3KW ASD-A2-3023-L A2 3KW基础型全闭环 ASDA-A2 3KW ECMA-E11830RS A2 3KW 带键槽带中心螺纹孔油封