VFRIC界面的帮助文档内容
- 格式:doc
- 大小:132.50 KB
- 文档页数:9
第一部分 VISSIM 使用说明1.VISSIM 简介VISSIM 为德国PTV 公司开发的微观交通流仿真软件系统,用于交通系统的各种运行分析。
该软件系统能分析车道类型、交通组成、交通信号控制、停让控制等众多条件下的交通运行情况,具有分析、评价、优化交通网络、设计方案比较等功能,是分析许多交通问题的有效工具。
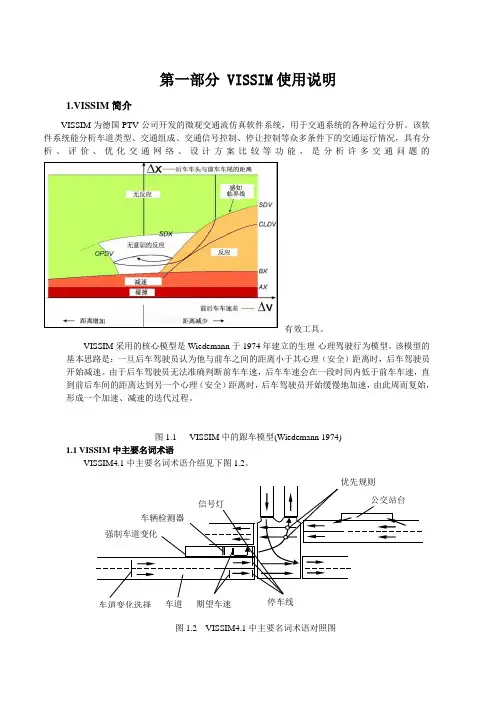
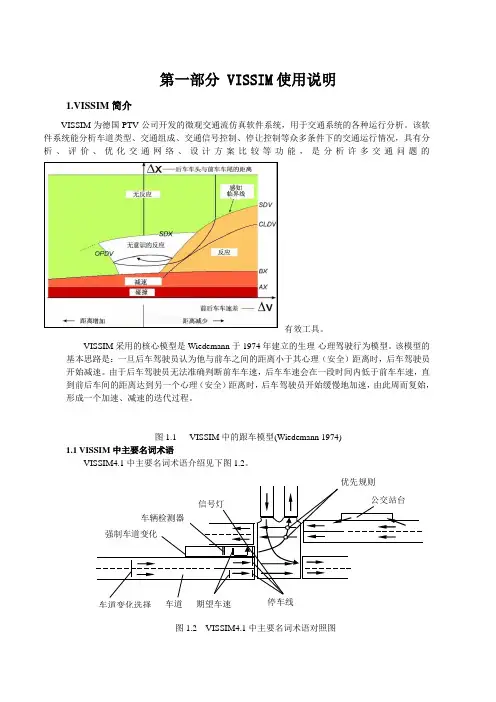
VISSIM 采用的核心模型是Wiedemann 于1974年建立的生理-心理驾驶行为模型。
该模型的基本思路是:一旦后车驾驶员认为他与前车之间的距离小于其心理(安全)距离时,后车驾驶员开始减速。
由于后车驾驶员无法准确判断前车车速,后车车速会在一段时间内低于前车车速,直到前后车间的距离达到另一个心理(安全)距离时,后车驾驶员开始缓慢地加速,由此周而复始,形成一个加速、减速的迭代过程。
图1.1 VISSIM 中的跟车模型(Wiedemann 1974)1.1 VISSIM 中主要名词术语VISSIM4.1中主要名词术语介绍见下图1.2。
图1.2 VISSIM4.1中主要名词术语对照图1.2 VISSIM操作界面VISSIM程序界面分为如下区域:图1.3 VISSIM程序界面Header标题栏:显示仿真程序的名称,版本号,当前的升级包编号,以及路网文件名称;如果是DEMO 文件,“Demo”的字样会添加在版本号后面。
Menu bar菜单栏:控制程序功能。
Tool bars工具栏:控制路网编辑器和仿真功能。
Status bar状态栏:显示编辑内容和仿真状态。
Scroll bars滚动条:路网可视区域的垂直和水平滚动。
1.2.1 VISSIM菜单(1)File文件菜单(文件管理和打印命令)New新建:初始化系统(关闭路网文件而不保存,创建新路网文件)。
Open打开:打开路网文件。
Read Additionally附加读取:再附加读入另一个路网文件。
Save保存:以相同的路径和名称保存当前的.INP 路网文件,快捷键CTRL+S。
Visual MODFLOW使用说明书1.整体特征Visual MODFLOW 主要由四个用户界面组成:主菜单、输入模块、运行模块和输出模块,另外还有设置和帮助系统。
主菜单下包括以下选项:[文件]选择或退出Visual MODFLOW文件。
[输入]进入输入模块修改当前的Visual MODFLOW数据集。
[运行]进入运行模块修改时间参数及数值模拟。
[输出]进入输出模块对数值模拟结果后处理。
[设置]选择变量及溶质运移模型。
[帮助]关于Visual MODFLOW的主要信息。
在[文件]下有七个选项可供选择:[打开]打开一个已经存在的文件,[新建]建立一个新的数据集,[另存为]将当前模型赋与一个新的文件名,[输入]输入一个已经存在的MODFLOW 数据集(其扩展名为.BAS),[输出]输出图形为世界坐标系下的AutoCAD DXF格式或模型坐标系下的EMF格式。
[打印],[退出]。
1.1界面设计打开一个文件后,不论是输入、输出还是运行,其界面是相似的。
顶部菜单栏依据不同模块变化。
侧菜单栏包括视图选项及当前模块或界面的特定功能,侧菜单栏有如下选项:[View Column]显示沿列的截面图,[View Row] 显示沿行的截面图,[View Layer] 显示层平面图,[Goto]显示指定的行、列、层,[Previous]显示前一行、列或层,[Next]显示下一行、列或行。
立方体导航器:提供了一个代表模型区域的简化三维模型。
坐标区:显示指针所在位置的当前坐标及单元号。
状态栏:描述当前显示模块的功能性和使用性。
功能键:F1-帮助;F2-为将来的三维模型作保留;F3-储存文件;F4-显示文件选择对话框,可以输入DXF格式图片;F5-放大;F6-缩小到满屏;F7-移动(点击左键拖至该点到新位置并单击);F8-在行视图或列视图下指定垂向放大的数目;F9-覆盖层(显示或隐藏图层特征);F10-返回主菜单。
1.2新建模型在主菜单[文件]下选择[新建],将会出现一个新建模型的对话框,选择储存文件的地址并输入新文件的名字,按[保存]继续建模型。
VR学习资料第⼀课:VRay的安装和操作流程⼀、Vray的安装⼆、Vray的简介:VRay是由著名的3DS max的插件提供商Chaos group推出的⼀款较⼩,但功能却⼗分强⼤的渲染器插件。
VRay是⽬前最优秀的渲染插件之⼀,尤其在室内外效果图制作中,vray⼏乎可以称得上是速度最快、渲染效果极好的渲染软件精品。
随着vray的不断升级和完善,在越来越多的效果图实例中向⼈们证实了⾃⼰强⼤的功能。
VRay主要⽤于渲染⼀些特殊的效果,如次表⾯散射、光迹追踪、焦散、全局照明等。
可⽤于建筑设计、灯光设计、展⽰设计、动画渲染等多个领域VRay渲染器有Basic Package 和Advanced Package两种包装形式。
Basic Package具有适当的功能和较低的价格,适合学⽣和业余艺术家使⽤。
Advanced Package 包含有⼏种特殊功能,适⽤于专业⼈员使⽤。
以下是Vray的作品欣赏三、Vray的⼯作流程1创建或者打开⼀个场景2指定VRay渲染器3设置材质4把渲染器选项卡设置成测试阶段的参数:①把图像采样器改为“固定模式“,把抗锯齿系数调低,并关闭材质反射、折射和默认灯。
②勾选GI,将“⾸次反射”调整为lrradiance map模式(发光贴图模式)调整min rate(最⼩采样)和max rate(最⼤采样)为-6,-5,同时“⼆次反射”调整为QMC[准蒙特卡洛算法]或light cache[灯光缓冲模式],降低细分。
5根据场景布置相应的灯光。
①开始布光时,从天光开始,然后逐步增加灯光,⼤体顺序为:天光----阳光----⼈⼯装饰光----补光。
②如环境明暗灯光不理想,可适当调整天光强度或提⾼暴光⽅式中的dark multiplier (变暗倍增值),⾄直合适为⽌。
③打开反射、折射调整主要材质6根据实际的情况再次调整场景的灯光和材质7渲染并保存光⼦⽂件①设置保存光⼦⽂件②调整lrradiance map(光贴图模式),min rate(最⼩采样)和max rate(最⼤采样)为-5,-1或-5,-2或更⾼,同时把[准蒙特卡洛算法] 或[灯光缓冲模式] 的细分值调⾼,正式跑⼩图,保存光⼦⽂件。
第一部分 VISSIM 使用说明1.VISSIM 简介VISSIM 为德国PTV 公司开发的微观交通流仿真软件系统,用于交通系统的各种运行分析。
该软件系统能分析车道类型、交通组成、交通信号控制、停让控制等众多条件下的交通运行情况,具有分析、评价、优化交通网络、设计方案比较等功能,是分析许多交通问题的有效工具。
VISSIM 采用的核心模型是Wiedemann 于1974年建立的生理-心理驾驶行为模型。
该模型的基本思路是:一旦后车驾驶员认为他与前车之间的距离小于其心理(安全)距离时,后车驾驶员开始减速。
由于后车驾驶员无法准确判断前车车速,后车车速会在一段时间内低于前车车速,直到前后车间的距离达到另一个心理(安全)距离时,后车驾驶员开始缓慢地加速,由此周而复始,形成一个加速、减速的迭代过程。
图1.1 VISSIM 中的跟车模型(Wiedemann 1974)1.1 VISSIM 中主要名词术语VISSIM4.1中主要名词术语介绍见下图1.2。
图1.2 VISSIM4.1中主要名词术语对照图1.2 VISSIM操作界面VISSIM程序界面分为如下区域:图1.3 VISSIM程序界面Header标题栏:显示仿真程序的名称,版本号,当前的升级包编号,以及路网文件名称;如果是DEMO 文件,“Demo”的字样会添加在版本号后面。
Menu bar菜单栏:控制程序功能。
Tool bars工具栏:控制路网编辑器和仿真功能。
Status bar状态栏:显示编辑内容和仿真状态。
Scroll bars滚动条:路网可视区域的垂直和水平滚动。
1.2.1 VISSIM菜单(1)File文件菜单(文件管理和打印命令)New新建:初始化系统(关闭路网文件而不保存,创建新路网文件)。
Open打开:打开路网文件。
Read Additionally附加读取:再附加读入另一个路网文件。
Save保存:以相同的路径和名称保存当前的.INP 路网文件,快捷键CTRL+S。
ANSYS怎么使用help,帮助文档介绍一.进入帮助系统可以通过下列三种方式进入:1.进入ANSYS的操作界面后,在应用菜单中选取Help进入;2.在ANSYS程序组中选取Help System进入:Start Menu > Programs > ANSYS XX>Help System;3.在任何对话框中选取 Help。
二.帮助系统的内容安排:点击帮助系统的目录,就看到如下的ANSYS帮助系统的整体内容安排:1.前面4个部分是与软件版本,安装,注册相关的信息,只需作相应的了解即可,如下:※Release Notes※ANSYS Installation and Configuration Guide for UNIX※ANSYS Installation and Configuration Guide for Windows※ANSYS, Inc. Licensing Guide 2.接下来两个部分是比较重要的部分,ANSYS的命令和单元手册,对用到的命令和单元应作详细的了解和掌握。
※ANSYS Commands Reference※ANSYS Element Reference3.下面四个部分是ANSYS相关的操作手册,说明如下:※Operations Guide 基本界面,操作指南※Basic Analysis Procedures Guide 基础分析指南※Advanced Analysis Techniques Guide 高级分析指南※Modeling and Meshing Guide 建模与分网指南4.以下几个部分则是ANSYS分模块的分析指南,如下:※Structural Analysis Guide 结构分析指南※Thermal Analysis Guide 热分析指南※CFD FLOTRAN Analysis Guide 流体分析指南※Electromagnetic Field Analysis Guide 电磁场分析指南※Coupled-Field Analysis Guide 耦合场分析指南5.为更好的使用ANSYS方便,快捷的解决更多的工程实际问题,建议仔细学习以下几个部分:※APDL Programmer's Guide:APDL操作手册※ANSYS Troubleshooting Guide:ANSYS错误信息指南※Mechanical Toolbar:机械工具栏※ANSYS/LS-DYNA User's Guide:ANSYS/LS-DYNA操作指南※ANSYS Connection Users Guide:接口技术指南6.欲快速掌握ANSYS的使用,莫过于通过实例和练习,而ANSYS 的帮助系统中则提供大量的例题及练习供用户参考,所以以下两个部分是经常光顾的。

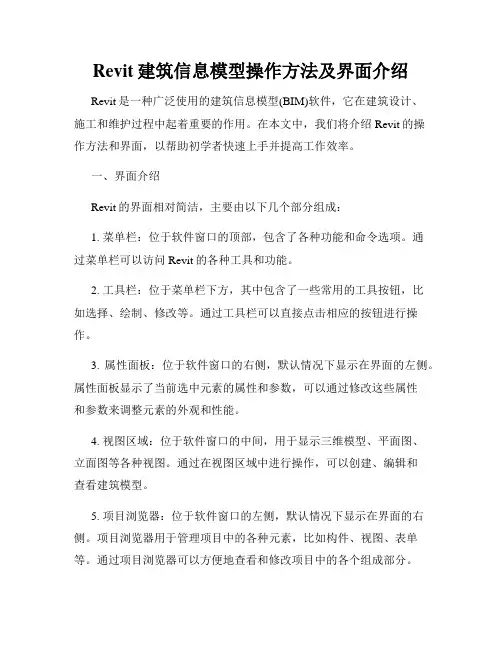
Revit建筑信息模型操作方法及界面介绍Revit是一种广泛使用的建筑信息模型(BIM)软件,它在建筑设计、施工和维护过程中起着重要的作用。
在本文中,我们将介绍Revit的操作方法和界面,以帮助初学者快速上手并提高工作效率。
一、界面介绍Revit的界面相对简洁,主要由以下几个部分组成:1. 菜单栏:位于软件窗口的顶部,包含了各种功能和命令选项。
通过菜单栏可以访问Revit的各种工具和功能。
2. 工具栏:位于菜单栏下方,其中包含了一些常用的工具按钮,比如选择、绘制、修改等。
通过工具栏可以直接点击相应的按钮进行操作。
3. 属性面板:位于软件窗口的右侧,默认情况下显示在界面的左侧。
属性面板显示了当前选中元素的属性和参数,可以通过修改这些属性和参数来调整元素的外观和性能。
4. 视图区域:位于软件窗口的中间,用于显示三维模型、平面图、立面图等各种视图。
通过在视图区域中进行操作,可以创建、编辑和查看建筑模型。
5. 项目浏览器:位于软件窗口的左侧,默认情况下显示在界面的右侧。
项目浏览器用于管理项目中的各种元素,比如构件、视图、表单等。
通过项目浏览器可以方便地查看和修改项目中的各个组成部分。
二、基本操作方法1. 创建建筑模型:在Revit中,首先需要创建建筑模型。
可以通过在视图区域中绘制基本形状,比如墙体、楼板、窗户等,然后通过连接这些元素来构建建筑模型。
2. 编辑建筑模型:一旦创建了建筑模型,就可以通过编辑工具对其进行修改。
比如可以选择墙体并移动、旋转或删除,也可以修改墙体的高度、厚度等参数。
3. 添加族族:在Revit中,族族是各种建筑元素的模板,比如家具、设备、灯具等。
可以通过在项目浏览器中选择适当的族族,然后拖拽到视图区域中添加到建筑模型中。
4. 设置视图:Revit具有强大的视图设置功能,可以实时显示建筑模型的不同视图,比如平面图、立面图、剖面图等。
通过设置视图,可以调整展示效果和图纸样式。
5. 数据分析:Revit还支持对建筑模型进行数据分析,比如能源分析、结构分析等。
目录1 欢迎使用IAPview (6)1.1 系统要求 (6)1.1.1 硬件要求 (6)1.1.2 软件要求 (6)1.2 软件安装 (6)1.3 软件授权 (7)1.4 软件卸载 (7)1.5 运行说明 (7)1.6 版本说明 (8)2 IAPview开发环境 (8)2.1软件界面 (8)2.2 工程浏览窗 (9)2.3 元件浏览窗 (10)2.4 菜单栏 (10)2.4.1 文件菜单 (10)2.4.2 编辑菜单 (11)2.4.3 插入菜单 (12)2.4.4 视图菜单 (12)2.4.5 格式菜单 (13)2.4.6 系统菜单 (14)2.4.7 帮助菜单 (14)2.5 工具栏 (15)2.5.1 常用工具栏 (15)2.5.2 动作工具栏 (16)2.5.3 绘图工具栏 (18)2.6 弹出式右键菜单 (19)2.6.1 工程浏览窗右键菜单 (19)2.6.2 图层浏览窗右键菜单 (19)2.6.3 画面编辑右键菜单 (20)2.7 其他鼠标快捷方式 (20)2.8 快捷键 (20)2.9 用箭头键移动对象 (21)3 使用开发环境 (21)3.1 新建工程 (21)3.3 创建一般画面 (21)3.3.1 新建画面 (21)3.3.2 修改画面属性 (22)3.4 创建操作窗画面 (23)3.5 使用图形 (24)3.6 使用图像 (24)3.7 使用文本 (25)3.9 旋转对象 (28)3.10 自定义运行环境 (29)3.10.1 常规设定 (29)3.10.2 启动页面 (29)3.10.3 环境保护 (30)3.10.4通讯设置 (31)3.11 系统设置 (32)4 使用元件 (33)4.1 元件的概念 (33)4.2 元件的来源 (33)4.3 元件的使用方式 (33)4.3.1 新建元件 (33)4.3.2 动画设定 (33)4.3.3 元件参数设定 (34)5 建立动画链接 (35)5.1 连接设备库 (35)5.2 工艺设备编号选择 (36)5.3 工艺IO点编号选择 (36)5.4 联动画面 (38)5.5 联动操作窗 (39)6 定义用户安全 (40)6.1 使用安全管理 (40)6.2 配置岗位权限 (41)6.3 配置用户 (42)6.4 用户登录 (43)6.5 注销权限 (43)7 使用运行环境 (44)7.1 进入运行环境 (44)7.2 在线查看信息 (44)7.3 在线修改与保存 (45)8 构建分布式网络 (45)8.1 网络架构 (45)8.2 配置网络资源 (46)9 报警记录显示 (46)9.1 创建报警控件 (47)9.2 报警记录说明 (47)9.3 过滤和筛选 (47)9.3.1 一次筛选 (47)8.3.2 在结果中筛选 (48)9.4 确认报警 (48)9.5 历史报警查询 (48)10 实时趋势和历史趋势 (49)10.1 创建趋势图控件 (49)10.2.1 曲线通信设定 (49)10.2.2 曲线参数设定 (51)10.3 实时趋势曲线说明 (51)10.4 历史趋势说明 (52)10.5 趋势曲线调试工具 (53)10.5.1 工艺IO点信息 (53)10.5.2 多坐标轴显示 (54)10.5.3 曲线放大 (54)10.5.4 Y轴操作 (55)10.5.5 曲线恢复 (55)10.5.6 曲线标尺 (55)11 使用导航功能 (55)11.1 导航功能总述 (55)11.2 画面导航配置 (56)11.3 逻辑导航配置 (56)11.4 使用导航功能 (56)11.5 元件定位功能 (57)12 系统时间同步 (57)12.1 时间同步结构 (57)12.2 同步服务器配置 (58)12.3 同步客户端配置 (58)12.4 使用手动同步 (58)12.5 使用自动同步 (59)13 工程示例 (59)13.1 创建工程 (59)13.2 连接服务器 (60)13.3 新建一般画面 (61)13.4 新建元件 (61)13.5 链接数据 (62)13.6 制作操作窗 (63)13.7 设置联动操作窗 (64)13.8 设置联动画面 (64)13.9 运行系统 (65)13.10 退出运行环境 (66)14 术语对照表 (66)1 欢迎使用IAPview1.1 系统要求1.1.1 硬件要求✓Pentium III 1.0GHz (或以上) 处理器✓256 M RAM 以上✓ 2.0GB 硬盘自由空间✓TCP/IP 网络协议及相应网卡,使用静态的IP地址分配策略✓带有24 位彩色图形显示卡的SVGA 或更好的显示器,最佳分辨率1280*1024 ✓输入设备(如鼠标)、键盘1.1.2 软件要求✓WindowsXP、WindowsVista、Windows7操作系统✓Windows2000、Windows2003、Windows2008操作系统1.2 软件安装IAP V1.0安装程序用于安装IAP系列软件,启动该安装程序后,进入安装的欢迎页面,点击下一步,选择软件的安装路径,如图1-1所示。
visual modflow用户手册[整理版] VisualMODFLOW专业地下水流动和污染物运移模拟的集成三维图形模拟环境Waterloo Hydrogeologic许可证Waterloo Hydrogeologic公司(WHI)保留这个软件复制品的所有权。
该许可证允许你在以下条件下使用该软件复制品:1、版权说明本软件受加拿大版权法和相关国际协定条款保护。
因此,你必须象对待一本书一样对待该软件,但有一例外。
为了让你能长期使本软件,保证你的投资不受损失。
Waterloo Hydrogeologic公司授权你可以复制软件的文档副本。
说该软件“象一本书”, Waterloo Hydrogeologic公司的意思是,比如,任何人可以使用该软件,并且它可以自由地从一台计算机移到另一台计算机上,只要它不是同时在两台计算机上使用。
正象一本书不能同时被不同地方的读者浏览一样。
特别是,你不能出售、出租、分发下一级许可、或租借本软件或其文档;在没有得到Waterloo Hydrogeologic公司书面同意以前不能对该软件或文献做篡改、修订、或摘用,包括,但不仅限于翻译、反编译、反汇编、或制造下游产品。
所提供的软件和文档包含有商业秘密,持证者同意在没有得到Waterloo Hydrogeologic公司书面同意以前不会将这些商业秘密对非持证者公开。
2、保证Waterloo Hydrogeologic公司保证,在正常使用情况下,从购买之日起30天内磁盘材料和文件在材料和制造工艺上不会受到损坏,一旦材料和制造工艺上有缺损,Waterloo Hydrogeologic公司将给你替换缺损的磁盘和文件。
该保证仅限于替换,并不包括其他的任何损伤,包括但不仅限于利润方面以及特别的、偶然性的、连续的,或其他相似的索赔。
3、弃权除如上所述以外,不管是该软件的研制者还是其它的个人或组织都没有权力代表他(他们)制定有关该软件的明确的或者是隐含的保证。
1.2.4 VFRIC Abaqus User Subroutines Reference ManualUser subroutine to define frictional behavior for contact surfacesOverviewUser subroutine VFRIC:can be used to define the frictional behavior between contact pair surfaces;能够用来定义接触对表面间的摩擦行为;can be used when the classical Coulomb friction model is too restrictive and a more complex definition of shear transmission between contacting surfaces is required;能够在经典的库伦摩擦模型太具限制性,并且接触表面之间需要一个更为复杂的剪切传输的定义时使用;must provide the entire definition of shear interaction between the contacting surfaces;必须在接触表面之间提供完整的“交互剪切”的定义;can use and update solution-dependent state variables;可以使用并更新基于解的状态变量;cannot be used in conjunction with softened tangential surface behavior; and不能够与软化的切向表面行为一起使用;cannot be used with the general contact algorithm.不能与通用接触算法一块使用。
通用接触算法只可以被用于三维表面;Two-dimensional surfaces cannot be used with the general contact algorithm.二维表面不能与通用接触算法一起使用TerminologyThe use of user subroutine VFRIC requires familiarity with the following terminology.使用VFRIC子程序要求熟悉下列术语。
Surface node numbers 表面节点编号The “surface node number” refers to the position of a particular node in the list of no des on the surface. For example, there are nSlvNod nodes on the slave surface. Number n, n=1, 2 ... nSlvNod, is the surface node number of the n th node in this list; jSlvUid(n) is the user-defined global number of this node. An Abaqus/Explicit model can be definedin terms of an assembly of part instances (see “Defining an assembly,” Section 2.9.1 of the Abaqus Analysis User's Manual). In such models a node number in jSlvUid is an internally generated node number. If the original node number and part instance name are required, call the utility routine VGETPARTINFO (see “Obtaining part information,” Section 2.1.5).“表面节点编号”指的是表面上节点列表里一个特殊点的位置。
例如,在从接触面上有nSlvNod个节点。
编号n,n=1,2, ... nSlvNod,是该节点列表里第n个节点的节点编号;jSlvUid(n)是该节点用户自定义的全局编号。
Abaqus/Explicit模型可以按照零件实体的安装来定义(see“Defining an assembly,” Section 2.9.1 of the Abaqus Analysis User's Manual)。
在这样的模型里,jSlvUid里的节点编号是一个内部生成的节点编号。
如果要求原始节点编号和零件实体的名字,则调用实用程序VGETPARTINFO。
Contact points 接触点The nodes on the slave surface that are in contact in the current time increment are defined as “contact points.” The number of contact points is passed into this subroutine as nContact. The array jConSlvid(nContact) gives the surface node numbers for the contact points.从接触面上的那些在当前时间增量接触的节点被定义为“接触点”。
接触点的数量作为nContact 被传到子程序中。
数组jConSlvid(nContact) 给出了接触点的表面节点编号。
Local coordinate system 局部坐标系A local coordinate system is defined for each contact point to facilitate specification of frictional forces and incremental slips . The local 1-direction for both two-dimensional and three-dimensional contact is tangential to the master surface, and it is defined by 1s s t d d =, where s d is the incremental slip vector. The incremental slip vectorused to define 1t corresponds to the incremental slip in the current time increment for penalty contact and the predictedincremental slip for kinematic contact. The master surface normal direction, n, is the local 2-direction for two-dimensional contact and the local 3-direction for three-dimensional contact. The local 2-direction for three-dimensional contact is given by 21t n t =⨯, which is also tangent to the master surface. The vectors are shown inFigure 1.2.4–1 and Figure 1.2.4–2. The direction cosines for 1t and n with respect to the global coordinate system are available in dirCosT1 and dirCosN, respectively. In the case of zero incremental slip (0s d =) we choose an arbitrarydirection for 1t that is orthogonal to the normal direction, n.为每个接触点都定义一个局部坐标系以促进摩擦力和增量滑移的规范。
对二维和三维接触来说,局部1-direction 是切向于主接触面的,并且被定为1s s t d d =,其中s d 是增量滑移矢量。
增量滑移矢量用来定义1t 相当于在当前时间增量下对罚接触的增量滑移和对运动学接触的预测到的增量滑移。
主接触面的法线方向,n ,对二维接触来说是局部2-direction ,对三维接触是局部3-direction 。
21t n t =⨯给出了三维接触的局部2-direction的定义,它也相切于主接触面。
Figure 1.2.4–1和 Figure 1.2.4–2给出了矢量图。
1t 的方向余弦和与全局坐标系相关的n 分别在dirCosT1和dirCosN 里可行。
在0增量滑移的情况下(0s d =),我们为1t 选择一个任意方向,那就是正交于法线方向,n 。
Figure 1.2.4–1 Local coordinate system for two-dimensional contact with VFRIC .Figure 1.2.4–2 Local coordinate system for three-dimensional contact with VFRIC .Frictional forcesYou specify the frictional force, fTangential, at each contact point in local coordinates in this subroutine. The array fTangential is dimensioned such that only the tangential components can be specified. Any components of the frictional force that are not specified will remain equal to zero. For three-dimensional contact with isotropic friction, only the f irst component of the frictional force need be specified since the second component should be zero. A “stick force” at each contact point is provided in the array fStickForce to the assist you in setting appropriate frictional force values. The stick force is the force required to prevent additional “plastic” slipping. The stick force at each contact point is provided as a scalar value(标量)as it would act in the direction opposite tot. The stick force is computed1prior to calling user subroutine VFRIC by either the kinematic or the penalty contact algorithm. See “Contact constraint enforcement methods in Abaqus/Explicit,” Section 34.2.3 of the Abaqus Analysis User's Manual, for descriptions of the kinematic and penalty contact algorithms and the user interface for choosing between them. The first component of the frictional force should be in the range between zero and minus the stick force value. Typically, the stick force will be positive and the first component of the applied frictional force will be negative, opposing the incremental slip. Penalty contact includes an elastic slip regime due to finite penalty stiffness, so occasionally, during recovery of elastic slip, the stick force will be negative, indicating that it is appropriate for the first component of the frictional force to be positive (i.e., acting in the same direction as the incremental slip). A noisy or unstable solution is likely to result if the first component of fTangential is set outside of the range between zero and negative the value of the stick force.在子程序的局部坐标系中的每一个接触点上,你要指定摩擦力,fTangential。