嵌入式计算机在校园太阳能供电的交通控制系统中的应用
项目介绍
比利时的一所学校希望实现一个中央交通控制系统,为他们的学生提供一个安全的校园环境。此外,整个系统必须是太阳能供电的。计划在附件地区设置限速指示,在交通高峰时刻,例如早上7点到10点以及下午3点到6点,速度限制将会被调整到30km/h。Moxa的嵌入式计算机被用来作为中央控制器以管理整个系统。
系统要求
》用于实时控制和远程监测的集成网页服务器
》用于日志和数据处理的前端通信计算机
》VGA显示器
》系统集成的开发简单
》用于速度限制检测和控制以及文字显示的集成数字输入输出端口
Moxa的方案
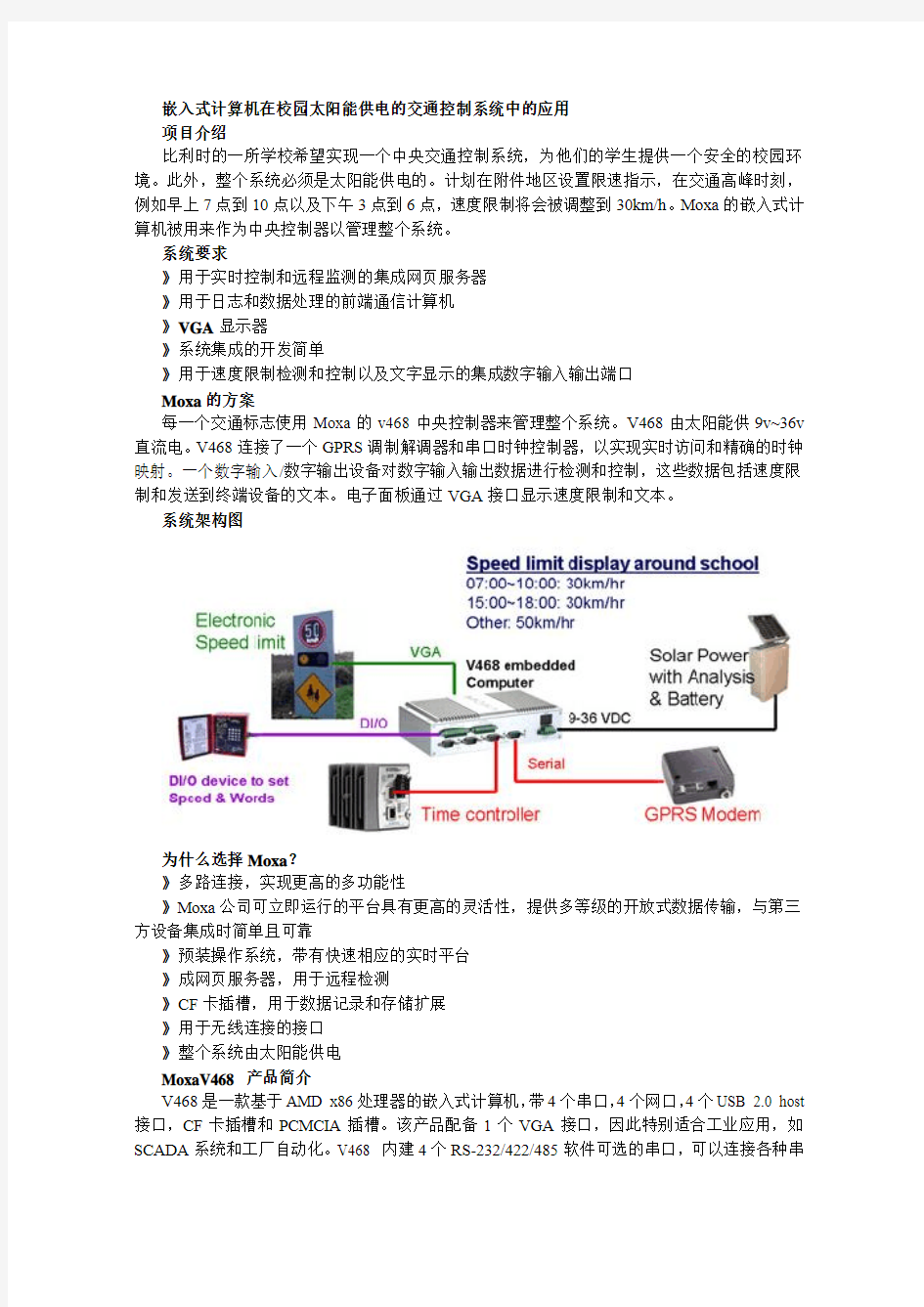
每一个交通标志使用Moxa的v468中央控制器来管理整个系统。V468由太阳能供9v~36v 直流电。V468连接了一个GPRS调制解调器和串口时钟控制器,以实现实时访问和精确的时钟映射。一个数字输入/数字输出设备对数字输入输出数据进行检测和控制,这些数据包括速度限制和发送到终端设备的文本。电子面板通过VGA接口显示速度限制和文本。
系统架构图
为什么选择Moxa?
》多路连接,实现更高的多功能性
》Moxa公司可立即运行的平台具有更高的灵活性,提供多等级的开放式数据传输,与第三方设备集成时简单且可靠
》预装操作系统,带有快速相应的实时平台
》成网页服务器,用于远程检测
》CF卡插槽,用于数据记录和存储扩展
》用于无线连接的接口
》整个系统由太阳能供电
MoxaV468 产品简介
V468是一款基于AMD x86处理器的嵌入式计算机,带4个串口,4个网口,4个USB 2.0 host 接口,CF卡插槽和PCMCIA插槽。该产品配备1个VGA接口,因此特别适合工业应用,如SCADA系统和工厂自动化。V468 内建4个RS-232/422/485软件可选的串口,可以连接各种串
口设备。借助4个10/100Mbps网口还可以组建冗余网络,从而实现无间断的数据采集和传输。此外,V468提供了8个DI和8个DO,可以轻松连接外部DI/DO设备。您还可以通过CF卡插槽和USB接口轻松扩展系统存储空间,满足工业应用数据存储和缓存的需求。V468预装WinCE 6.0或者嵌入式WinXP操作系统,为程序员提供了一个友好的程序开发界面,保证程序员可以迅速开发出无bug的程序,同时减少费用。
Moxa V468产品特点
》AMD Geode LX 800@0.9W CPU,500MHz
》内建256MB (CE) 或者512MB (XPe) DDR SDRAM
》内建256MB (CE) 或者1GB (XPe) 工业级DOM用于存储操作系统
》256 K电池备份SRAM
》2个RS-232和2个RS-232/422/485串口,支持任意波特率
》4个10/100Mbps以太网口,可以组建冗余网络
》8个DI和8个DO,可以连接外部传感器设备
》可通过CF卡插槽扩展存储容量
》4个USB 2.0 host,支持系统导入
》电源、电池、存储器状态指示灯(LED)
》立即可用的WinCE 6.0或嵌入式WinXP操作系统
》导轨安装或壁挂安装
》坚固无风扇设计
Moxa V468硬件规格
系统
CPU:AMD Geode LX 800@0.9W处理器,带128K L2缓存,主频500MHz
操作系统(预装):Windows CE 6.0或者Windows XP Embedded
前端总线:400 MHz
系统芯片组:AMD CS5536芯片组
扩展总线:板载PC/104-Plus
BIOS:4 MB Flash BIOS,支持即插即用,APM 1.2
系统内存:200-pin SO-DIMM插槽,内建256 MB
DDR(CE),512MB(XPe),支持DDR400高达1 GB
SRAM:256 KB,电池备份
显示
图形控制器:CPU集成2D图形
显示器接口:CRT接口,用于VGA输出
存储
内建:存储OS的256 MB(CE),1G(XPe)工业级DOM
扩展:支持通过CF卡插槽扩展存储容量
其他
USB:4个兼容USB 2.0接口,A型接头,支持系统导入
音频:AC97 audio,支持声音输出接口
键盘/鼠标:1个PS/2接口,支持标准PS/2键盘和PS/2鼠标
(通过Y型线缆连接(可选))
LAN口
LAN:4个10/100 Mbps速率自侦测以太网口,RJ45接头
控制器:Realtek RTL8100C
电磁隔离保护:内建1.5 KV电磁隔离保护
串口
串口标准:2个RS-232串口,2个RS-232/422/485串口(软件选择)
串口数量:4
接头:DB9针式
串口信号保护:全信号15 KV ESD保护
串口通信参数
数据位:5,6,7,8
停止位:1,1.5,2
奇偶校验:None,Even,Odd,Space,Mark
流量控制:RTS/CTS,XON/XOFF,ADDC? (自动数据流向控制)用于RS-485 波特率:50 bps ~ 921.6 Kbps,支持非标准波特率,详情见用户手册
串口信号
RS-232:TxD,RxD,DTR,DSR,RTS,CTS,DCD,GND
RS-422:TxD+,TxD-,RxD+,RxD-,GND
RS-485-4线:TxD+,TxD-,RxD+,RxD-,GND
RS-485-2线:Data+,Data-,GND
数字输入
通道数量:8
输入电压:
逻辑“0”:0 ~ 0.8V
逻辑“1”:2.0 ~ 5.5V
保护:过流保护(-24mA)
数字输出
通道数量:8
输出电流:24mA
输出电压:
逻辑“0”:0 ~ 0.55V
逻辑“1”:2.5 ~ 3.3V
过流保护:750 mA
LED指示灯
系统:电源指示灯,存储器指示灯,SRAM电源状态灯
LAN:4个10M/Link和4个100 Mbps指示灯(位于接头上)
开关和按钮
开关:电源开关
按钮:Reset按钮,用于实现热启动
机械特性
外壳材质:铝,EPIC形式
重量:1.32 kg
尺寸
无安装附件:223 x 120 .5x 57 mm (8.78 x 4.74 x 2.24 in)
有安装附件:248 x 140 x 70 mm (9.76 x 5.51 x 2.76 in)
安装方式:导轨安装,壁挂安装
工作环境
工作温度:-10 ~ 60 °C (14 ~ 140 °F)
工作湿度:5 ~ 95% RH
存储温度:-20 ~ 80 °C (-4 ~ 176 °F)
电源需求
输入电压:9 ~ 36 VDC(3-pin端子排输入,V+,V-,SG)
安规认证
EMC:CE (EN55022 Class A,EN61000-3-2 Class A,
EN61000-3-3,EN55024),FCC (Part 15 Subpart
B,CISPR 22 Class A)
安全:UL/cUL (UL60950-1,CSA C22.2 No. 60950-1-03),LVD 认证:RoHS,WEEE
可靠性
报警工具:内建蜂鸣器和RTC (实时时钟),带备份电池
自动重启触发器:内建WDT (看门狗时钟)
支持1-255级时间间隔系统重启设置,可由软件编程
保修期
5年
编号: 毕业论文(设计) 题目智能交通信号灯控制系统设计 指导教师xxx 学生姓名杨红宇 学号201321501077 专业交通运输 教学单位德州学院汽车工程系(盖章) 二O一五年五月十日
德州学院毕业论文(设计)中期检查表
目 录 1 绪论............................................................................................................................ 1 1.1交通信号灯简介...................................................................................................... 1 1.1.1 交通信号灯概述.................................................................................................. 1 1.1. 2 交通信号灯的发展现状...................................................................................... 1 1.2 本课题研究的背景、目的和意义 ......................................................................... 1 1. 3 国内外的研究现状 ................................................................................................. 1 2 智能交通信号灯系统总设计.................................................................................... 2 2.1 单片机智能交通信号灯通行方案设计 ................................................................. 2 2.2 功能要求 ............................................................................... 错误!未定义书签。 3 系统硬件组成............................................................................................................ 4 4 系统软件程序设计.................................................................................................... 5 5 结论和展望................................................................................................................ 6 参考文献...................................................................................... 错误!未定义书签。 杨红宇 要: 但是传统的交通信号灯不已经不能满足于现代日益增长的交通压力,这些缺点体现在:红绿 以及车流量检测装置来实现交通信号灯的自控制,随着车流量来改变红绿灯1 绪论 1.1 1.1.1 为现代生活中必不可少的一部分。
和谐型系列电力机车电气系统特点分析 【摘要】文章以和谐1、2、3型电力机车的电气系统为研究对象,对机车的电气系统特点按照主电气电路、辅助电气电路、微机控制系统分类做了系统的比较分析。 【关键词】电力机车;主电气电路;辅助电气电路;控制系统 1 引言 和谐系列电力机车是南车集团和北车集团与国外企业合作,引进消化技术,并国产化的新一代交流货运机车,型号有HXD1、HXD1B、HXD1C,HXD2、HXD2B、HXD2C和HXD3、HXD3B、HXD3C。和谐型系列机车电气系统的主、辅回路均采用了交流控制技术,系统的设计坚持起点高、技术领先的原则,采用先进、成熟、可靠的技术,按照标准化、系列化、模块化、信息化的总体要求进行全方位设计的。 2 主电气系统 机车主电气电路主要由网侧电路、主变压器、牵引变流器及牵引电机构成,如图1所示。其中和谐型系列电力机车网侧电路主要由受电弓、主断路器、台避雷器、高压电压传感器、高压电流传感器、高压隔离开关、主变压器原边、回流侧互感器和接地碳刷等组成。下面主要从主变压器、变流器和牵引电机三个方面进行比较。 图1 简化主电气电路 2.1 HXD1型电力机车主电路特点 (1)主变压器 采用EFAT6744型电力机车牵引变压器。其内除主变压器外,还装有两台100HZ滤波电抗器。它们装在一个邮箱内,共用一个冷却系统。主变压器是单相变压器,卧式结构,采取车体下悬安装方式。 (2)牵引变流器 每台机车由2节车组成,每节车设有1个牵引变流柜,每个牵引变流柜由2套相互独立的变流器组成。一个变流器包含2个并联的四象限整流器、1个牵引逆变器和1个辅助逆变器等。 (3)牵引电机
太阳能光伏发电原理与应用 实验报告 课题名称:太阳能光伏发电原理与应用实验专业班级:12级应用光电子01 学生学号:1209040110 学生姓名:胡超 学生成绩: 指导教师:刘国华 课题工作时间:2015.6.1至2015.6.4
实验一、太阳辐射能的测量 下表是针对武汉市的日照情况,记录武汉市的某一天某一时段(每两分钟记 录一次)的太阳辐射强度: 太阳辐射监测系统 瞬时值累计值 时间 总辐射散射辐射直接辐射反射辐射净全辐射总辐射散射辐射直接辐射反射辐射净全辐射10:06 538 113 436 41 112 0.031 0.014 0.016 0.003 0.009 10:08 404 105 298 32 77 0.056 0.013 0.045 0.004 0.012 10:10 449 99 347 31 268 0.049 0.013 0.037 0.004 0.009 10:12 416 97 304 33 246 0.056 0.012 0.043 0.004 0.033 10:14 645 118 525 49 347 0.056 0.012 0.042 0.004 0.033 10:16 198 105 57 24 105 0.077 0.014 0.062 0.006 0.040 10:18 549 107 425 42 326 0.025 0.013 0.007 0.003 0.012 10:20 610 111 485 45 329 0.066 0.013 0.051 0.005 0.039 10:22 631 108 513 50 304 0.076 0.013 0.061 0.006 0.039 10:24 619 108 493 45 284 0.076 0.013 0.062 0.006 0.036 10:26 465 103 310 39 194 0.075 0.013 0.059 0.006 0.034 10:28 653 109 402 47 264 0.067 0.013 0.043 0.005 0.027 10:30 690 111 337 48 263 0.079 0.013 0.046 0.006 0.032 10:32 693 113 318 47 249 0.083 0.013 0.042 0.006 0.031 10:34 653 115 214 48 219 0.082 0.014 0.035 0.006 0.029 10:36 713 118 176 53 145 0.061 0.013 0.018 0.005 0.021 10:38 575 111 92 44 89 0.087 0.014 0.020 0.006 0.015 10:40 717 115 53 44 90 0.080 0.014 0.009 0.006 0.010
南京师范大学中北学院
毕业设计(论文)开题报告
( 10 届)
题 目: 基于 PLC 智能交通灯控制系统设计
专 业: 电气工程及其自动化
姓 名: xxx 学 号: xxx
指导教师: xxx 职 称:
填写日期:
2014 年 2 月 20 日
南京师范大学中北学院教务处 制
开题报告填写要求
1.开题报告作为毕业设计(论文)答辩委员会对学生答辩资格
审查的依据材料之一。此报告应在指导教师指导下,由学生在毕业 设计(论文)工作前期内完成,经指导教师签署意见及院、系审查 后生效;
2.开题报告内容必须用黑墨水笔工整书写或按教务处统一设计 的电子文档标准格式(可从教务处网址上下载)打印,禁止打印在 其它纸上后剪贴,完成后应及时交给指导教师签署意见;
3.有关年月日等日期的填写,应当按照国标 GB/T 7408—94《数 据元和交换格式、信息交换、日期和时间表示法》规定的要求,一 律用阿拉伯数字书写。如“2011 年 4 月 26 日”或“2011-04-26”。
4.院系审查意见栏签章:自办专业盖中北学院教学院长签名章、 中北学院公章,非自办专业盖联办二级学院教学院长签名章、联办 二级学院公章。
毕 业 设 计(论 文)开 题 报 告
1.本课题的目的及研究意义:
随着我国交通事业的迅速发展,各种公交、运输汽车、私家车等车的急速增加,使 得城市道路交通日益堵塞,交通在许多城市已经成为“瓶颈”问题。因此,提高城市路 网的通行能力、实现道路交通的科学化管理迫在眉睫。
虽然各城市已在十字路口设置了交通灯,对交通进行了有效的疏通,但是随着社会、 经济的快速发展,原先的交通灯控制系统已经不能适应现在日益繁忙的交通状况。如何 改善交通灯控制系统,使其适应现在的交通状况,成为研究的课题。
传统的十字路口交通控制灯,通常的做法是:事先进行车流量的调查,运用统计的 方法将两个方向红绿灯的延时预先设置好。然而,实际上车辆流量的变化往往是不确定 的,有的路口在不同的时段甚至可能产生很大的差异。即使是经过长期运行、较适用的 方案,仍然会发生这样的现象:绿灯方向几乎没有什么车辆,而红灯方向却排着长队等 候通过。可见,统计的方法已不能适应迅猛发展的交通现状,更为现实的需要是:能有 一种能够根据车流量变化适时调节的交通灯控制系统。
我所要研究的就是基于 PLC 的智能交通灯控制系统。智能交通系统(ITS—— Intelligent Transport Systems)ITS 是一个跨学科、信息化、系统化的综合研究体系, 其主要内容是:将先进的人工智能技术、自动控制技术、计算机技术、信息与通讯技术 及电子传感技术等有效的集成,并应用于整个地面交通管理系统而建立的一种在大范围 内、全方位发挥作用的,实时、准确、高效的综合交通运输管理系统。由于交通系统具 有较强的非线性、模糊性和不确定性,是一个典型的分布式非线性系统,而且具有多种 信息来源、多传感器的特点,用传统的理论与方法很难对其进行有效的控制。把先进的 智能控制技术、信息融合技术、智能信息处理技术与交通管理技术结合起来,代表着城 市交通信号控制系统发展的方向。
智能交通的发展是现代社会经济发展的客观要求,交通运输是国民经济和现代社会 发展的基础。由于现代社会城市化速度越来越快、国民经济的高速增长、全球经济的一 体化进程加快、个人旅行与休闲时间的不断增加以及人们对交通需求越来越高,智能交 通便成为现代社会经济发展的客观要求。
目录 引言............................................. 错误!未定义书签。 1、概述 ......................................... 错误!未定义书签。 1.1、交通灯的发展情况 (3) 2、交通灯模拟控制系统控制方案设计 (3) 2.1、技术控制要求 (4) 2.2、总体方案确定 (5) 2.2.1、方案的原理 (5) 2.2.2、方案的特点 (5) 2.2.3、方案的选择依据 (6) 3、交通灯模拟控制系统控制硬件设计 (6) 3.1、输入点和输出点分配 (6) 3.2、硬件选择 (7) 3.3、硬件连接 (8) 4、交通灯模拟控制系统控制软件设计 ........................ 错误!未定义书签。 4.1、程序流程图 (8) 4.2、梯形图 (9) 5、交通灯模拟控制系统仿真调试 ................................ .....错误!未定义书签。 5.1、系统程序仿真调试 (11) 致谢辞: (14) 总结: (15) 参考文献: (16) 附录: (17) 梯形程序图: (17) 指令程序: (19) 电源图: (21) 电气原理图: .......................................................................................................................... ..22
引言 随着我国经济的飞速发展,城市人口越来越多,居民出行次数和机动车拥有量不断增加,城市道路拥挤、车流量不均衡等问题日趋严重。人们经常会为道路拥挤、交通秩序混乱、出行时间过长等城市交通问题倍感苦恼,例如:绿灯方向几乎没有什么车辆,而红灯方向却排着长队等候通过。因此提高城市路网的通行能力、实现道路交通的科学化管理迫在眉睫,如何才能保持城市交通的安全便捷、高效畅通和绿色环保,已成为政府政策规划的一个重点问题。 通过对十字路口交通灯控制系统的设计与制作,使我们进一步巩固和加深了对所学的基础理论、基本技能和专业知识的认识掌握。同时也培养自身综合运用所学过的基础理论、基础知识和基本技能进行分析和解决实际问题的能力,更使我们受到了PLC系统开发的综合训练,从而能够使我们进行PLC系统设计和实施,并且掌握典型自动控制系统的工作原理和设计思路。更重要的是:通过对十字路口交通灯系统的每个环节的实际制作,锻炼了自身的刻苦钻研、勇于探索、实事求是、善于与他人合作的工作作风,这为我们将来的上岗实习做好了充分的准备。 1、概述 近年来,随着大规模集成电路的发展,以微处理器为核心的可编程控制器(PLC)得到了迅猛的发展。早期的PLC主要用于顺序控制,今天的PLC已经能够应用于闭环控制、运动控制以及复杂的分布式控制系统,已逐步发展成为有一类解决自动化问题的有效而便捷的方式。由于PLC自身具有功能完善、结构模块化、开发容易、操作方便、性能稳定、可靠性高、性价比高、等优点,因而在工业生产中具有广阔的应用前景,并被誉为现代工业生产自动化的三大支柱之一。而且随着集成电路的发展和网络时代的到来,PLC必将能够获得更大的发展空间。PLC主体由三部分组成,主要包括中央处理器CPU、存储系统和输入、输出接口。PLC基本结构如图1-1所示:
文档从互联网中收集,已重新修正排版,word格式支持编辑,如有帮助欢 迎下载支持。机器视觉的论述作业 题目:基于机器视觉智能交通灯控制系统 学院名称:电气工程学院 专业班级: 姓名: 学号: 时间:
1 绪论 (3) 2 基于机器视觉的智能交通灯系统设计 (3) 3 智能交通灯控制策略 (5) 3.1 模糊控制 (5) 3.2 智能交通灯模糊控制策略 (5) 3.3 解模糊化算法 (6) 4 系统硬件设计 (6) 4.1 摄像头的安装和特性 (6) 4.2 视频采集模块设计 (6) 4.3 DSP控制处理模块设计 (7) 4.4 信号灯驱动模块设计 (7) 4.5 电源模块设计 (8) 5 系统软件设计及调试 (8) 5.1 软件总体设计方案 (8) 5.2 视频采集模块的软件设计 (9) 5.3 系统调试 (9) 6 总结 (9) 7 参考文献 (10)
1 绪论 随着社会经济的发展,城市车辆数量迅速增长,交通拥挤日益严重,造成的交通事故和环境污染等负面效应也日益突出。城市交通问题直接制约着城市的建设和经济的增长,与人们的日常生活密切相关。通常交通阻塞大都是由于城市路口实际通行能力不足所造成的,路口交通问题逐步成为经济和社会发展中的重大问题,为此世界大多数国家都在进行智能交通灯控制系统的研究。 本文的目的是对基于机器视觉的智能交通灯控制系统进行了研究。基于机器视觉的智能交通灯控制系统对路口交通灯进行智能控制,根据各相位车流量大小,智能分配红绿灯时间,彻底改变了传统交通灯控制方式的不足。目前由于城市路口交通信号灯的控制策略不理想,导致了路口实际通行能力下降,停车次数比较多,车辆通过路口的延误时间较长,容易造成不必要的拥堵。改善交通灯控制策略,来提高路口的实际通行能力,这是城市交通控制中需要解决的主要问题。自从计算机控制系统应用于交通灯控制以来,硬件设备的不断更新和改进,智能化和集成化成为城市道路交通信号控制系统的研究趋势,而路口交通灯控制系统是智能交通系统中的关键点和突破口。 2 基于机器视觉的智能交通灯系统设计 基于机器视觉的智能交通灯控制系统是由摄像机、视频采集模块、DSP控制处理模块、信号灯驱动模块、电源模块、时钟模块、复位模块和信号灯组等组成,其组成框图如2.1图所示 图2.1系统组成框图 系统中摄像机是用来拍摄路口车辆视频,是路口车流量获取的基础设备,其拍摄的视频图像质量高低直接影响到系统对交通灯控制的精度。摄像机的选择决定着视频的质量,所以一般要选择稳定性高,分辨率符合系统要求的摄像机。目前摄像机主要分为两种,一种是电荷耦合器件_℃CD图像传感器;一种是互补性
太阳能发电原理 1、原理概述 太阳能光伏发电系统是利用太阳能电池板将太阳能转换成电能的一种可再生清洁发电机制。当光线照射到太阳能电池表面时,一部分光子被太阳电池板反射掉,另一部分光子被硅材料吸收,光子的能量传递给硅原子,使电子发生越迁,成为自由电子在P-N结两侧集聚形成电位差。当外部接通电路时,在该电压的作用下,则会有直流电流流过外部电路产生一定的输出功率。 通常每块太阳能电池组件输出的直流电压较低,一般为35V。为了提高电压,达到逆变器最佳工作状态的额定输入直流电压,将一定数量的太阳能电池串联到一起形成回路,然后接入逆变器中,逆变器将输入的直流电转换成交流电。逆变后得到的交流电通过站内的升压变压器升至指定电压后并入电网。 图1 太阳能发电系统原理 2、系统部件 2.1 太阳电池 在太阳能光伏发电系统中,太阳能电池板占据着举足轻重的地位,它是将太阳能转换成电能核心部件。太阳能电池是利用光电转换原理使太阳的辐射光通过半导体物质转变为电能的,这种光电转换过程通常叫做“光生伏打效应”,因此太阳能电池又称为“光伏电池”。用于制造太阳能电池的半导体材料是一种介于导体和绝缘体之间的特殊物质,和任何物质的原子一样,半导体的原子也是由带
正电的原子核和带负电的电子组成,半导体硅原子的外层有4个电子,按固定轨道围绕原子核转动。当受到外来能量的作用时,这些电子就会脱离轨道而成为自由电子,并在原来的位置上留下一个“空穴”,在纯净的硅晶体中,自由电子和空穴的数目是相等的。如果在硅晶体中掺入硼、镓等元素,由于这些元素能够俘获电子,它就成了空穴型半导体,通常用符号P表示;如果掺入能够释放电子的磷、砷等元素,它就成了电子型半导体,以符号N代表。若把这两种半导体结合,交界面便形成一个P-N结。太阳能电池的核心技术就在这个“结”上,P -N结就像一堵墙,阻碍着电子和空穴的移动。当太阳能电池受到阳光照射时,电子接受光子的能量,向N型区移动,使N型区带负电,同时空穴向P型区移动,使P型区带正电。这样,在P-N结两端便产生了电动势,也就是通常所说的电压。如果分别在P型层和N型层焊上金属导线,接通负载,则外电路便有电流通过,如此形成的一个个电池元件,把它们串联、并联起来,就能产生一定的电压和电流,输出功率。 图2 太阳能电池结构 目前,制作太阳能电池的原料有单晶硅、多晶硅、非晶硅等。由于生产能力的不断提高和和科学技术的不断进步,单晶硅以其较高的转化率,高稳定性,低衰减率,成为各太阳电池生产企业重点研发的项目。单晶硅太阳电池的生产工艺一般分五个流程完成:提纯过程拉棒过程切片过程制电池过程封
单片机课程设计报告交通灯控制系统设计
摘要 本设计是针对交通灯系统的设计,由单片机AT89C51(实物用AT89S52)、键盘、LED显示、交通灯演示系统组成。单片机是把微型计算机的各功能部件集成在一块芯片中,构成的一个完整的微型计算机。AT89C51单片机是MC-51中的子系列,是一组高性能兼容型单片机,AT89C51是一个低功耗高性能的CMOS 8位单片机,40个引脚,片内含4KB Flash ROM和128B RAM,它是一个全双工的串行通行口,既可以用常规编程,又可以在线编程。 本设计中的数码管的选通采用的方法是动态显示,对每一位数码分时轮流通电显示,复位电路采用上电+按钮电平复位,时钟电路采用内部时钟产生方式。对特殊情况的处理采用中断处理方式,在中断处理程序中采用对管脚的状态查询扫描,已采取相应情况的处理。 对设计方案进行电路硬件设计,并将已编程的程序载入调试,可以得到理想的实验效果。系统包括人行道、左转、右转、以及基本的交通灯的功能.具体功能是假如 A 道和B道上均有车辆要求通过时,A、B道轮流放行。A道放行 25秒,B道放行20秒。一道有车而另一道无车,交通灯控制系统能立即让有车道放行。有紧急车辆要求通过时,系统要能禁止普通车辆通行,A、B道均为红灯,紧急车由K2 开关模拟。绿灯转换为红灯时黄灯亮 1秒钟。系统除基本交通灯功能外,还具有倒计时、时间设置、紧急情况处理、分时段调整信号灯的点亮时间以及根据具体情况手动控制等功能。
目录 1引言.......................................................................................................................................... - 1 - 1.1交通灯的重要作用........................................................................................................... - 1 -1.2该交通灯系统的特点....................................................................................................... - 1 -2系统总体方案及硬件设计 ......................................................................................................... - 2 - 2.1原理框图........................................................................................................................... - 2 -2.2设计功能........................................................................................................................... - 2 - 2.3交通灯控制系统各部分硬件组成................................................................................... - 2 - 2.3.1复位部分.................................................................................................................... - 2 - 2.3.2时钟电路部分............................................................................................................ - 3 - 2.3.3路口指示灯部分........................................................................................................ - 3 - 2.3.4显示部分.................................................................................................................... - 3 -2.4元器件清单....................................................................................................................... - 4 -3软件设计..................................................................................................................................... - 5 - 3.1交通灯控制系统软件流程图及程序分析....................................................................... - 5 - 3.1.1主程序流程图及程序模设计.................................................................................... - 5 - 3.1.2INT0中断服务程序流程图及程序模设计.............................................................. - 6 -3.2路口指示灯部分............................................................................................................... - 7 - 3.3显示部分........................................................................................................................... - 7 - 4. Proteus软件仿真 ..................................................................................................................... - 8 - 5 课程设计体会......................................................................................................................... - 10 -参考文献....................................................................................................................................... - 10 -附1:源程序代码 (13) 附2:系统原理图 (20)
第六章机车微机控制系统 第一节机车微机控制系统概述 一、微机控制系统的基本概念和特点 微机控制系统一般都具有三个要素,即控制对象、信息处理机构、执行机构控制目标;信息处理机构将目标值和实际情况进行比较、运算,给执行机构控制对象出动作指令;执行机构根据接收到的动作指令进行调节,以求达到或尽员接近控制目标。图6一1所示为控制系统示意图。 控制系统有开环控制和闭环控制之分。在开环控制中,输出信号不反馈到信息处理机构;在闭环控制中,信息处理机构是根据给定目标与输出反馈信号的差值来进行控制的。毫无疑问,闭环控制比开环控制易于稳定并具有较高的精度。 一个复杂的控制系统可以由多个闭环系统组合而成,如速度环、电流环、电压环等。例如,55型电力机车微机控制系统,不论是在正常工况下还是在故障工况下,都采用闭环控制,由系统自动调节,从而减轻了司机的劳动强度,简化了司机的操作程序。 在电力机车上,微机的控制目标主要是电机电枢电流和机车速度,信息处理机构是微型计算机,执行机构是晶闸管变流装置。即微机根据司机给定的手柄级位以及实际机车速度来调节晶闸管的触发角,从而使机车稳定运行在司机希望的工况。 我国558型电力机车是国产电力机车中首次采用微机控制的车型。以往的机车都采用模拟控制,如553、554改和55:型机车等,它们都是采用以运算放大器为基础的模拟控制方式。随着电力电子技术、半导体集成技术的发展和控制要求的提高,用微机控制来取代模拟控制是牵引动力技术发展的必由之路,它标志着机车控制技术水平上升到了新阶段。与膜拟控制相比,微机控制有以下特点: (l)微机控制系统不仅需要有硬件,而且必须有软件,而模拟控制中左右硬件。硬件是指各种能完成一定功能的电子插件,是看得见摸得着的。软件是指为实现一定功能而*制的程序,它通常存储在断电也能保存的器件(如 EPROM、ROM)中,是一串由0和1构成的代码。软件又分系统软件和应用软件。对用户来讲,主要是根据需要编制应用软件。 (2)微机控制系统的硬件是通用的,它不是针对某个特定任务设计的。例如,我们现在使用的微机控制硬件就能在所有交直传动车上使用,尽管有些功能可能在某种车型上并不需要。因此,微机控制的优点就是通用,易于从一种车型移植推广到另一种车型,而且易于适应设计过程中新增加的控制功能要求。而模拟控制的电路有一定的针对性,不同的车型不能互相通用。 (3)微机控制具有灵活可变的软件,对于不同机车的不同的控制功能要求,可用改变软件的方法来实现。在研发过程中,对于设计,调试过程中新提出的问题可以通过修改,增加一段程序的方法来解决,一般不必改动硬件。而在模拟控制中,没增加一个功能都必须通过增加相应的电路来实现,功能越多,则硬件电路越多,也越复杂。有些控制功能用硬件来实现电路比较复杂,如果用软件来是实现则只是增加一段相应的程序。因此,在微机控制中,有时用软件来实现一些硬件难于实现的功能。例如,多段折线的函数发生器,空转保护中的速度差,加速度,加速度的变化率,轮径修正及减流曲线等,用软件实现既方便快
郑州航空工业管理学院 毕业论文(设计) 2012 届电子信息工程专业 ****** 班级 题目智能交通灯控制系统——软件部分 姓名***** 学号*********** 指导教师***** 职称教授 二〇一二年五月二十一日
内容摘要 交通灯在现代社会交通管理的作用毋庸置疑,但某些所需的功能仍然不具备,本文设计的交通灯不但实现了基本的倒计数功能,还创新的添加了流量控制、可调节时间、紧急情况处理和随时东西、南北通行切换的功能,并对车流量检测和判断做出了多个方案对比,最终确定使用闯红灯警戒线作为车流量检测的方法。 设计以STC89C52单片机为核心,外接外围电路构成基本电路,编写C语言程序,用keil编译调试,在PROTEUS软件中仿真,用来实现了交通微控制器的模拟。 智能交通灯控制系统通常要实现车流量自动控制和在紧急情况下能够手动切换信号灯让特殊车辆优先通行。该文主要论述了智能交通灯控制系统的软件实现,还对STC89C52单片机的结构特点和重要引脚功能进行了介绍,同时对智能交通灯控制系统的设计进行了分析。最后利用PROTEUS软件对交通灯控制系统进行仿真。 关键词 单片机;STC89C52;车流量;智能交通灯
Intelligent Traffic Light Control System —The software section ********************************** Abstract The traffic lights in the modern society traffic management role, but some no doubt the functionality needed to still do not have, this paper introduces the design of traffic light not only realize the basic pour count function, still added the function of traffic control, adjustable time, emergency situation and direction switching , and to finalize the use of red light running cordon as the methods of traffic detection.we compared a number of options of the traffic detection and the judgment. Design with STC89C52 single-chip microcomputer as the core, an external circuit constitute the basic circuit, periphery type C language program, Keil compiling and debugging , PROTEUS software simulation, in basically achieved traffic simulation of micro controller. Intelligent traffic control system will usually achieve traffic volume automatic control and in emergency situations can manual switching lights make special vehicle right-of-way.This paper mainly discusses the software implementation of the intelligent traffic light control system。Microcontroller STC89C52 structural characteristics and pin functions are
2011年至2012年第1学期《单片机原理与应用》课程设计 班级1006402 指导教师涂立旎 学生人数___ _3__ ___ 设计份数 1 2011年12月23日
城市交通灯控制系统设计报告 1006402-42 流溪 1006402-24钱升 1006402-06毛运鹏 一.设计时间 2012年12月19日——2011年12月23日 二.设计地点 一实验楼401机房 三.设计小组及成员分工 1006402-42 流溪(组长,编写及调试程序) 1006402-24 钱升(负责设计报告的书写及资料整理) 1006402-06 毛运鹏(原理图、流程图设计) 四.指导老师 涂立老师,旎老师 五.设计题目 基于51型单片机的城市交通灯控制系统 六.设计容及目标 1.该交通灯系统的设计容 本设计是基于AT89S51单片机的十字路口交通灯控制系统,利用6个发光二极管模拟交通灯。按照时间控制原则,利用并行接口和定时器,采用时间中断方式设计一套十字路口的交通灯管理系统,通行时间(或禁止时间)30秒,准备时间3秒,在准备时间里黄灯闪烁3次,闪烁频率为0.5秒,周而复始。 2.该交通灯系统的设计目标 本系统结构简单,操作方便;可实现自动控制,具有一定的智能性;对优化城市交通具有一定的意义。本设计将各任务进行细分包装,使各任务保持相对独立;能有效改善程序结构,便于模块化处理,使程序的可读性、可维护性和可移植性都得到进一步的提高。
七.流程图与原理图及部分说明 1.程序流程图如图1所示: 图1. 程序流程图 2.主程序流程图步骤说明: (1)东西方向车道红灯亮,南北方向车道绿灯亮。表示东西方向车道上的车辆禁止通行,南北方向车道允许通行。绿灯亮足规定的时间隔时,控制器发出状态信号,转到下一工作状态。
一、选择题 1.劈相机启动电阻备有两组,当启动电阻263R烧损时,将启动电阻转换开关296QS打向(B )位置,即可使备用电阻264R启动。 A.上 B.下 C.左 D.右 2.SS9型机车单相负载电路共有(D)路。 A.1 B.2 C.3 D.4 3.当控制风缸风压大于(A)KPa时可断开596SB。 A.500 B.600 C.700 D.800 4.主断路器合闸时,主断路器风缸的风压必须(A) A.大于450KPa B.大于400KPa C.大于500KPa D.大于550KPa 5.SS9电力机车控制电源提供(C)稳压控制电源 A.交流110V B.交流220V C.直流110V D.直流220V 6.电磁阀的代码是(B) A.SA B.YV C.AC1 D.QS 7.下列不属于SS9型电力机车启动通风机的条件是(D) A.主断已闭合 B.PX已启动 C.通风机本身没故障 D.压缩机启动 8.若第一台劈相机故障,则需要把劈相机故障开关242QS置(C)位,此时隔离了1MG,而用2MG作电阻分相启。 A.0 B.1 C.2 D.3 9.受电弓升起时,必须具备大于(B)的压缩空气才能完成。 A.400KPa B.450KPa C.500KPa D.600KPa 10.将扳键开关408SA1(408SA2)置“强泵”位,当风压达到(C)KPa时,安全阀会发出排气声,要立即停止强泵风操作 A.900 B.1200 C.1000 D.1100 11.SS9机车电路符号代号“KE”表示(D) A.中间继电器 B.压力继电器 C.时间继电器 D.接地继电器 12.SS9机车闭合通风机扳键开关,有(B)个接触器得电。 A.5 B.6 C.7 D.8 13.闭合制动风机扳键开关是(A)。 A.407SA B.408SA C.409SA D.410SA 14.通风机扳键开关是(C)。 A.405SA B.407SA C.406SA D.408SA 15.机车单相负载电路电压为(B)。 A.180V B.220V C.360V D.720V 16.下列不属于真空断路器合闸的必备条件:(C) A.司机控制器处于机械零位 B.主断处于正常开断状态 C.劈相机处于闭合位 D.主断风缸风压大于450kpa 17.SS9型电力机车控制线路分为两种:一种是LCU逻辑控制和微机控制电路;另一种是(A ) A.有接点控制电路 B.整备控制电路 C.调速控制电路 D.控制电源电路 18.当真空主断路器具备合闸条件时,扳动主台上“断”扳键开关于“合”位,控制单元LCU使导线( D )有电。 A.499 B.531 C.280 D.541 19.SS9型机车中,闭合主操纵台电钥匙570QS1(570QS2)开关,导线(A )
贵州师范学院 电子课程设计报告书 班级11级1班 学生姓名王旭东 学号11030540094 专业电子信息科学与技术 院系物电学院 2014年6 月20 日
摘要 随着城市人口的快速增长和机动车数量的大量增加,城市交通灯作为缓解交通压力、提高道路通行效率的重要手段,其作用越来越重要。因此,如何改进交通灯的设计,使其更好的适应城市交通的发展也成为一个重要课题。红绿灯控制系统是利用8253A定时/计数器芯片的定时功能,向8259A中断控制器芯片发出定时中断请求,驱动8255A可编程并行接口芯片改变路口的LED灯的亮灭。系统采用DVCC-598JH+微机原理与接口技术实验箱作为测试与运行的平台,8086汇编语言作为编程语言,并用MASM5.0作为汇编语言开发环境。 关键词:红绿灯控制系统 8253A定时器 8259A中断控制器 8255A可编程并行接口 DVCC-598JH+ 目录 摘要 (201) 1.十字路口基本情况分析 (201) 2.交通灯状态转换分析.............................. III 3.紧急通行情况分析 (5) 4.硬件功能分析 (6) 4.1 8253A定时/计数器芯片 (6) 4.2 8259A中断控制器芯片 (7) 4.3 8255A可编程并行接口芯片 (9) 5.系统设计 (10) 5.1硬件设计 (10)
5.1.1 电路分析 (10) 5.1.2 电路连接设计 (10) 5.2软件设计 (12) 5.2.1 程序总体设计 (12) 5.2.2 程序流程设计 (13) 5.2.3 重要代码分析................................ XII 6.系统实现...................................... XVII 6.1 软件开发与运行环境 .. (10) 6.2 系统硬件环境 (20) 6.3 系统运行步骤 (20) 6.4 系统测试结果 (20) 参考文献 (21) 心得体会 (22) 1 十字路口基本情况分析 设有一个十字路口,1、3为东西方向,2、4为南北方向,1、3路口的绿灯亮,2、4路口的红灯亮,1、3路口方向通车;延时一段时间后,1、3路口的绿灯熄灭,而1、3路口的黄灯开始闪烁,闪烁若干次以后,1、3 路口红灯亮,而同时2、4路口的绿灯亮,2、4路口方向通车;延时一段时间后,2、4 路口的绿灯熄灭,而黄灯开始闪烁,闪烁若干次以后,再切换到1、3路口方向,之后重复上述过程。