第19章半监督学习
第3章介绍了半监督学习的概念。它的训练样本中只有少量带有标签值,算法要解决的核心问题是如何有效的利用无标签的样本进行训练。本质上,半监督学习也是要解决有监督学习所处理的问题。实践结果证明,使用大量无标签样本,配合少量有标签样本,可以有效提高算法的精度。在有些实际应用中,样本的获取成本不高,但标注成本非常高,这类问题适合使用半监督学习算法。
有监督学习中一般假设样本独立同分布。从样本空间中抽取l个样本用于训练,他们带有标签值。另外从样本空间中抽取u个样本,它们没有标签值。半监督学习[1][4]要利用这些数据进行训练,得到比只用l个样本更好的效果。
19.1问题假设
要利用无标签样本进行训练,必须对样本的分布进行假设。例如对于人脸识别问题,如果一个未标注的人脸图像属于某一个人,则它和已标注的样本一样要服从某种分布,即符合这个人的特点。半监督学习算法根据此假设来使用未标注样本,下面介绍常用的假设。
19.1.1连续性假设
在数学中连续性指自变量的微小改变不会导致函数值的大幅度改变。这里的连续性假设利用了同样的思想,距离近的样本具有相同的标签值,这是符合常规的一条假设。在有监督学习中也使用了这一假设,如k近邻算法假设一个样本和它的邻居点有相同的类型。
19.1.2聚类假设
这一假设的定义是:样本点形成一些离散的簇,同一个簇中的样本更可能是同一种类型的。需要注意的是同一个类型的样本可能分布在多个簇中。
19.1.3流形假设
这和第7章介绍的形降维算法中提出的假设相同,样本在高维空间中的分布近似位于低维空间的流形上。在这种情况下,可以用有标签和无标签的样本学习这个流形。
19.1.4低密度分割假设
对于分类问题,这里假设决策边界位于样本空间的低密度区域,即两个不同类之间的边界区域的样本稀疏。
19.2启发式算法
启发式算法是最简单的半监督学习算法,它的核心思想是先用有标签样本进行训练,然
后用训练得到的模型对无标签样本进行预测,从中挑选出一部分样本继续进行训练,以提升模型的精度。
19.2.1自训练
自训练(self-training ,也称为自标记)[2]是最简单的半监督学习算法。其做法是用有标签样本训练一个模型,然后对无标签样本进行预测,得到这些样本的伪标签。挑选出预测置信度高的部分样本加入到训练集继续训练模型,重复这一步骤直至结束。
19.2.2协同训练
协同训练(co-training )[3]将有标签样本的特征集划分成两个子集,然后用这些子集训练两个分类器,再用这些分类器对没有标签的样本进行预测,挑选出置信度高的样本,加入到另一个分类器的训练集中继续训练。
19.3生成模型
有监督学习的生成模型首先估计每个类的条件概率密度函数,然后根据贝叶斯公式得到样本属于每个类的概率。半监督学习的生成模型是这种方法的推广,它假设有标签样本和无标签样本由相同的概率分布生成,即聚类假设。根据这一假设,可以将无标签样本与概率分布关联起来,它们的标签是缺失变量,可以用EM 算法求解。生成模型假设每个类的样本服从概率分布()x ;p y θ,其中θ是概率密度函数的参数。如果无标签样本与有标签样本来自同一概率分布,则将这些无标签样本加上推测出来的标签值之后作为训练样本能够提高模型的准确率。如果这一假设不正确,用推理出来的错误标签进行模型训练反而会降低模型的准确率。
无标签样本由每个类的概率分布的混合来生成,常用的是高斯混合模型,假设每个类的数据服从正态分布。样本数据与标签值的联合概率密度函数可以由类的条件概率密度函数得到:
()()()
x,x ,p y p y p y θθθ=每个类的参数向量θ的值是要确定的参数,利用有标签样本和无标签样本得到,即求解下面的最优化问题(对数似然函数):
{}(){}()()
11max log x ,log x ,l l u i i i i i i l p y p y θθλθ+==++其中λ是人工设定的参数,1x ,...,x l 是有标签样本,1x ,...,x l l u ++是无标签样本。在实现时可以采用EM 算法,首先用有标签的样本估计出一组参数,然后在E 步中用这些参数对无标签样本进行标记,最后在M 步中用所有样本重新估计参数并更新参数。在得到无标签样本的标签值之后,加它们加入到训练集中继续训练。
19.4低密度分割
19.4.1半监督SVM
半监督支持向量机(Transductive SVM ,简称TSVM )[16]是标准支持向量机的半监督
学习版本,它可以用部分标注的样本进行训练,找到的分界面是样本稀疏的地方,使用了低密度分割假设。半监督支持向量机的目标是对无标签样本进行预测,使得分类间隔对所有样本最大化。在这里用有标签样本集D 进行训练,对无标签集进行测试:
{}x ,1,...,i D i k **
==训练时求解的问题为:
(
)()2
T T 1
min w 2w x 1w x 1i i i j
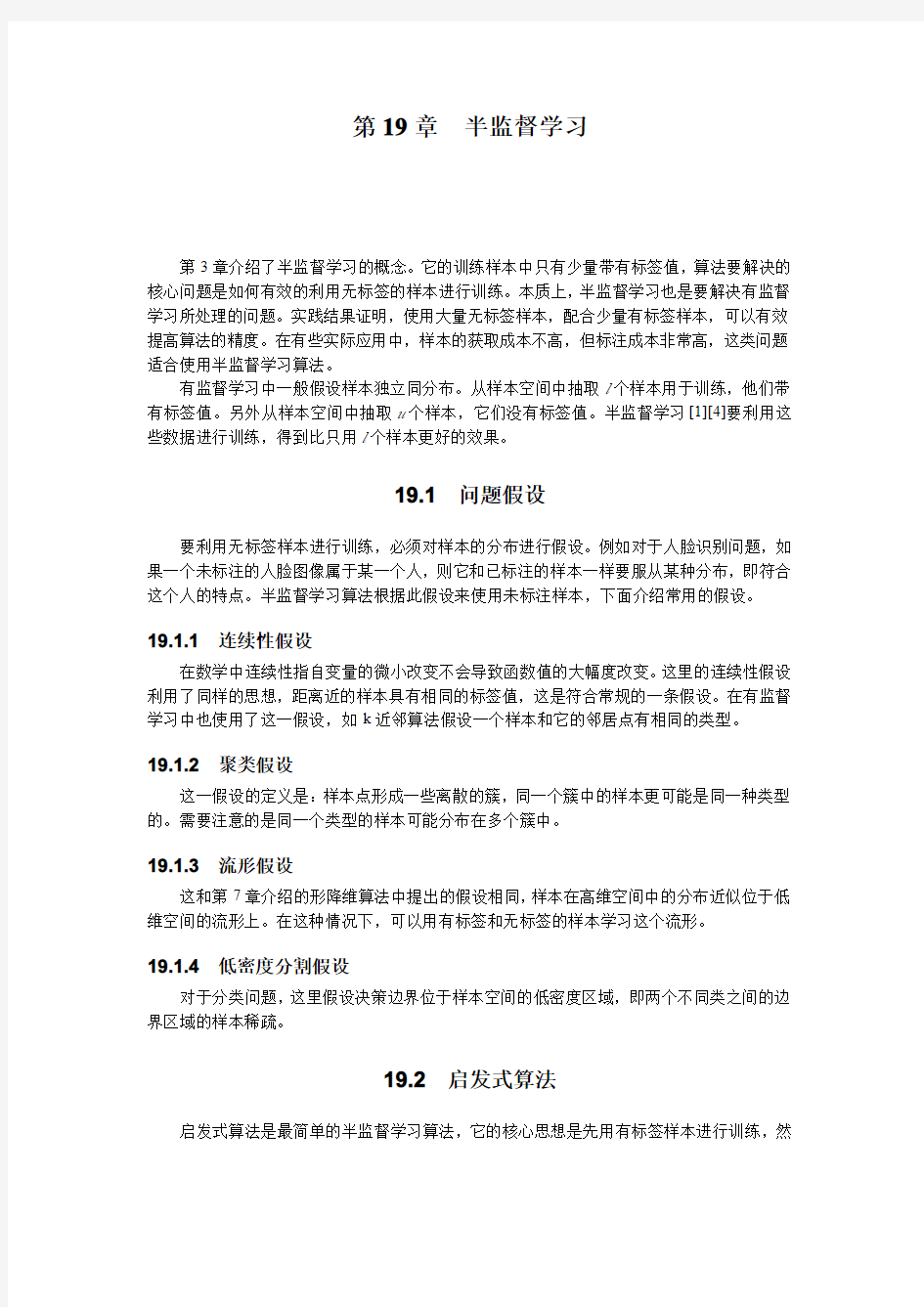
j j y b y b ξξ**+≥-+≥-实现时首先用带标签的样本进行训练,然后用得到的模型对无标签样本进行预测,得到这些样本的伪标签值j y *
。接下来再用这无标签的样本进行训练得到新的模型。
图19.1半监督支持向量机示意图
在上图19.1中矩形为无标签样本,半监督支持向量机将它们和圆形的有标签样本一同考虑,保证分类间隔最大化。
19.5基于图的算法
基于图的算法为样本构造带权重的无向图,用图表示有标签和无标签样本数据,图的构造和第7.3.2节的流形降维算法相同。图的顶点是有标签和无标签样本,边的权重为样本之间的相似度。建立图之后可以得到它的拉普拉斯矩阵,通过优化某一目标函数得到模型参数。分类函数要保证对有标签样本预测正确,对于图的点的预测结果是连续的,即满足连续性假设,这通过引入正则化项来实现。
19.5.1流形正则化
流形正则化算法假设每个类的有标签样本和无标签样本分布在同一个流形M 上。训练时要求解的问题为:
()()()()2211min ,l f H i i A I M H M i L f y f f dp l λλ∈=++???
???
∑?x x x 其中l 为有标签的训练样本数,M 为样本所在的流形。损失函数的第一项是对有标签样本的分类损失。第二项是预测函数的正则化项,用于控制预测函数的复杂度。第三项是流形正则化项,用于实现流形假设,即有标签样本与无标签样本分布在同一个流形上。其中H 为再生核希尔伯特空间,A λ和I λ是正则化项系数。流形正则化项由图的拉普拉斯二次型来近似,即:
()()()22
T
11l u l u ij i j M i j M w f f f dp ++===-≈?∑∑?f Lf x x 其中u 为无标签的训练样本数。拉普拉斯二次型在第7.3.2节已经介绍。
19.6半监督深度学习
和经典的机器学习算法相比,深度学习算法所需的训练样本量更大,因此样本标注成本问题更严重,半监督学习的各种方法也可以用于深度学习算法,下面介绍几种典型的实现。
最简单的方案是先用无标签样本预训练,然后用有标签样本进行模型微调。如果第一阶段不使用标签值,则只适合于无监督的深度学习,如自动编码器,受限玻尔兹曼机,这称为无监督预训练。另外一种思路是伪有监督预训练,用聚类等算法为样本生成标签值,然后用这些伪标签样本训练神经网络。无论哪种方案最后都是用有标签的样本进行微调。
也可以采用自训练的策略,文献[5]采用了这种思路。首先用有标签样本训练神经网络,然后用得到的模型对无标签的样本进行预测,得到伪标签,继续用这些样本训练模型。假设有n 个有标签样本()x ,y
,1,...,m m m n =,'n 个无标签的样本'x ,1,...,m m n =,类别数为C ,标签是一个向量。m f 是网络对有标签样本的预测输出值,'m
f 是网络对无标签样本的预测输出值。损失函数为有标签样本与无标签样本损失之和:
()()()
''''111111,,n C n C m m m m i i i i m i m i L L y f t L y f n n α=====+∑∑∑∑损失函数的前半部分是有标签样本的损失,后半部分为无标签样本的损失。其中'm i y 为
伪标签,是神经网络的预测结果。这种方法的一个主要创新是引入了参数()t α,这是无标签损失的权重参数,迭代过程中动态调整。初始时,神经网络对无标签样本的预测不准确,因此权重值很小;随着迭代的进行,预测越来越准,因此逐步加大这个值。
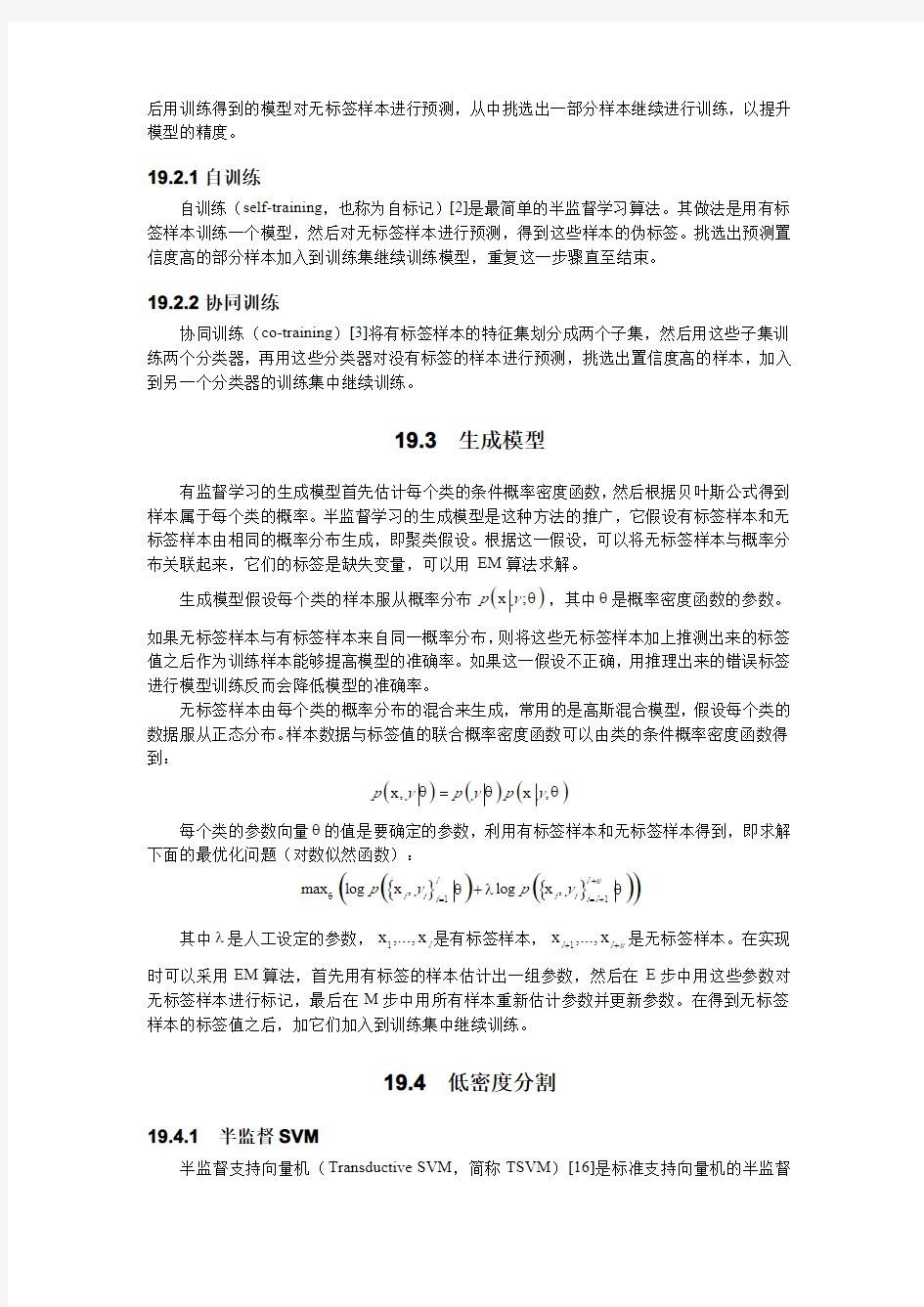
文献[6]提出了一种使用ladderNet 网络的半监督学习算法,训练时同时优化有标签样本和无标签样本的损失函数。ladderNet 网络是对多层自动编码器的改进。在这种网络中,编码器的中间层有一个分支连接到解码器网络,这可以被看作是跨层连接,另外在编码器的每层都加入了随机噪声。自动编码器的训练是无监督的,而半监督ladderNet 网络训练时,在编码器的最高层加入了有监督的损失函数,与无监督的损失函数整合,完成对有标签样本和无标签样本的训练。下图19.2为一个两层的ladderNet 网络示意图:
图19.2一个两层的ladderNet
上图最左边是为编码器的每一层添加的随机噪声,服从正态分布()20,N σ。i
f 为编码器网络第i 层的映射函数,被无标签样本与有标签样本共享。解码器网络第i 层的映射函数为i
g 。每各层有一个代价函数i C ,用于最小化重构误差。训练时要同时保证对有标签样本
正确分类,并最小化无标签样本的重构误差,前者是损失函数的有监督部分。半监督生成模型也可以与深度生成网络结合[15]。更多的半监督深度学习算法可以阅读文献[7-14]。
参考文献
[1]Olivier Chapelle,Bernhard Schlkopf,Alexander Zien.Semi-supervised learning.Cambridge.Mass:MIT
Press.ISBN 978-0-262-03358-9.
[2]Isaac Triguero,Salvador Garcia,Francisco Herrera.Self-labeled techniques for semi-supervised learning:
taxonomy,software and empirical study.Knowledge and Information Systems,2015.
[3]Luca Didaci,Giorgio Fumera,Fabio Roli.Analysis of Co-training Algorithm with Very Small Training
Sets.Lecture Notes in Computer Science,2012.
[4]Zhu,Xiaojin.Semi-supervised learning literature https://www.doczj.com/doc/ce7229790.html,puter Sciences,University of
Wisconsin-Madison,2008.
[5]Dong-Hyun Lee.Pseudo-Label :The Simple and Efficient Semi-Supervised Learning Method for Deep
Neural Networks.ICML 2013.
[6]Antti Rasmus,Harri Valpola,Mikko Honkala,Mathias Berglund,Tapani Raiko.Semi-supervised learning
with Ladder networks.neural information processing systems,2015.
[7]Zihang Dai,Zhilin Yang,Fan Yang,William W Cohen,Ruslan Salakhutdinov.Good Semi-supervised
Learning That Requires a Bad GAN.neural information processing systems,2017.
[8]Tim Salimans,Ian J Goodfellow,Wojciech Zaremba,Vicki Cheung,Alec Radford,Xi Chen.Improved
Techniques for Training GANs.neural information processing systems,2016.
[9]Philip Bachman,Ouais Alsharif,Doina Precup.Learning with Pseudo-Ensembles.neural information
processing systems,2014.
[10]Mehdi Sajjadi,Mehran Javanmardi,Tolga Tasdizen.Mutual exclusivity loss for semi-supervised deep
learning.international conference on image processing,2016.
[11]Mehdi Sajjadi,Mehran Javanmardi,Tolga Tasdizen.Regularization With Stochastic Transformations and
Perturbations for Deep Semi-Supervised Learning.neural information processing systems,2016. [12]Samuli Laine,Timo Aila.Temporal Ensembling for Semi-Supervised Learning.international conference
on learning representations,2017.
[13]Antti Tarvainen,Harri Valpola.Mean teachers are better role models:Weight-averaged consistency
targets improve semi-supervised deep learning results.neural information processing systems,2017. [14]M.Belkin,P.Niyogi.Semi-supervised Learning on Riemannian Manifolds.Machine Learning.56
(Special Issue on Clustering):209–239,2004.
[15]Diederik P Kingma,Shakir Mohamed,Danilo Jimenez Rezende,Max Welling.Semi-supervised
Learning with Deep Generative Models.neural information processing systems,2014.
[16]Thorsten Joachims.Transductive inference for text classification using support vector machines.
international conference on machine learning,1999.
工业机器人技术基础一体化教学
教学过程 备注一、组织教学 清点人数,师生相互问好,强调课堂纪律二、旧知回顾 工业机器人分类及应用 1、按臂部的运动形式分 (1)直角坐标型:臂部可沿三个直角坐标移动; (2)关节型:臂部有多个转动关节; (3)圆柱坐标型:臂部可作升降、回转和伸缩动作; (4)组合结构:可以实现直线、旋转、回转、伸缩; (5)球坐标型:臂部能回转、俯仰和伸缩。 2、按执行机构运动的控制机能分:点位型、连续轨迹型 3、按程序输入方式分:离线输入型、示教输入型 4、按应用领域分类:可分为搬运机器人、装配机器人、上下料机器人、焊接机器人、码垛机器人、喷涂机器人等。 工业机器人的安全使用 (1)安全注意事项 (2)安全操作规程 (3)安全使用规则 (4)操作注意事项三、新课导入及分析 在前两节课中,我们已经学习了工业机器人的定义,发展以及有关机器人的分类和应用。通过学习,让我们知道了机器人是一种复杂的机械装置,但是这种机械装置能实现强大的功能作用。那么,这机器人到底是什么样的呢?它们的结构又是怎样的呢?怀着这些疑问,让我们走进工业机器人的世界,去学习工业机器人的机械结构。 四、新课授学(教师讲解、观看视频)
工业机器人的机械结构是机器人的主要基础理论和关键技术,你是现代 机械原理研究的主要内容,机器人一般由驱动系统、执行机构、控制系统3 个基本系统,以及一些复杂的机械结构组成。通常用自由度、工作空间、额定负载、定位精度、重复精度和最大工作速度等技术指标来描述机器人的性能。 本任务主要内容是通过学习,了解有关工业机器人系统的基本组成、技术参数及运动控制,能够熟练进行机器人坐标和运动轴的选择,并能熟练的描述工业机器人的结构。 一机器人结构运动简图 机器人结构运动简图是指用结构与运动符号表示机器人臂部、腕部和手 指等结构及结构间的运动形式的简易图形符号。机器人结构运动简图能够更好的分析和记录机器人的各种运动和运动组合,可简单清晰的表明机器人的运动状态,有利于对机器人的设计方案进行鲜明的对比。 1.移动结构
机器人的动力学控制 The dynamics of robot control 自123班 庞悦 3120411054
机器人的动力学控制 摘要:机器人动力学是对机器人机构的力和运动之间关系与平衡进行研究的学科。机器人动力学是复杂的动力学系统,对处理物体的动态响应取决于机器人动力学模型和控制算法。机器人动力学主要研究动力学正问题和动力学逆问题两个方面,需要采用严密的系统方法来分析机器人动力学特性。本文使用MATLAB 来对两关节机器人模型进行仿真,进而对两关节机器人进行轨迹规划,来举例说明独立PD 控制在机器人动力学控制中的重要作用。 Abstract: for the robot dynamics is to study the relation between the force and movement and balance of the subject.Robot dynamics is a complex dynamic system, on the dynamic response of the processing object depending on the robot dynamics model and control algorithm.Kinetics of robot research dynamics problem and inverse problem of two aspects, the need to adopt strict system method for the analysis of robot dynamics.This article USES MATLAB to simulate two joints, the robot, in turn, the two joints, the robot trajectory planning, to illustrate the independent PD control plays an important part in robot dynamic control. 一 动力学概念 机器人的动力学主要是研究动力学正问题和动力学逆问题两个方面,再进一步研究机器人的关节力矩,使机器人的机械臂运动到指定位臵,其控制算法一共有三种:独立PD 控制,前馈控制和计算力矩控制,本文主要介绍独立PD 控制。 动力学方程:)()(),()(q G q F q q q C q q M +++=? ????τ
六年级数学应用题大全 六年级数学应用题1 一、分数的应用题 1、 一缸水,用去12 和5桶,还剩30%,这缸水有多少桶? 5÷(12 -30%)=5÷0.2=25(桶) 2、 一根钢管长10M ,第一次截去它的710 ,第二次又截去余下的13 ,还剩多少M ? 10×(1-710 )×(1-13 )=10×310 ×23 =2(M ) 3、 修筑一条公路,完成了全长的23 后,离中点16.5千M ,这条公路全长多少千M ? 16.5÷(23 -12 )=99(千M ) 4、 师徒两人合做一批零件,徒弟做了总数的27 ,比师傅少做21个,这批零件有多少个? 21÷(1-27 -27 )=49(个) 5、仓库里有一批化肥,第一次取出总数的25 ,第二次取出总数的13 少12袋,这时仓库里还剩24袋,两次共取出多少袋? 解:设两次共取出x 袋 25 x +(13 x -12)+24=x 解得:x=45 6、甲乙两地相距1152千M,一列客车和一列货车同时从两地对开,货车每小时行72千M,比客车快 27 ,两车经过多少小时相遇? 72÷(1+27 )=56(km/h ) 1152÷(72+56)=9(h ) 7、一件上衣比一条裤子贵160元,其中裤子的价格是上衣的35 ,一条裤子多少元? 解:设一条裤子x 元 (x +160)×35 = x 解得:x=240 8、饲养组有黑兔60只,白兔比黑兔多15 ,白兔有多少只? 60×(1+15 )=72(只) 9、学校要挖一条长80M 的下水道,第一天挖了全长的14 ,第二天挖了全长的12 ,两天共挖了多少M?还剩下多少M? 80×(14 +12 )=60(M ) 80-60=20(M ) 六年级数学应用题2 二、比的应用题 1、 一个长方形的周长是24厘M ,长与宽的比是 2:1 ,这个长方形的面积是多少平方厘M ? 24÷2÷(2+1)=4(cm ) (4×2)×(4×1)=32(cm 2 ) 2、 一个长方体棱长总和为 96 厘M ,长、宽、高的比是 3∶2 ∶1 ,这个长方体的体积是多少? 96÷4÷(3+2+1)=4(cm ) (4×3)×(4×2)×(4×1)=384( cm 3)
基于单片机控制的双足行走机器人设计 摘要:21世纪机器人发展日新月异,从传统的履带式机器人到如今的双足行走机器人,机器人的应用范围越来越广。本系统以单片机(STC89c52)为系统的中央控制器,以单片机(STC12c5410ad)为舵机控制模块。将中央控制器与舵机控制器,舵机,各类传感设备及受控部件等有机结合,构成整个双足行走机器人,达到行走、做动作的目的。单片机中央控制器与舵机控制器以串口通信方式实现。系统的硬件设计中,对主要硬件舵机控制器和STC89C52单片机及其外围电路进行了详细的讲述。硬件包括舵机控制器,STC12C5410AD 单片机,按键,各种传感器和数据采集与处理单元。软件包括单片机初始化、主程序、信号采集中断程序、通过串口通讯的接收和发送程序。论文的最后部分以双足行走机器人为基础,结合传感器,外围控制设备组成控制系统,并给出了此系统应用领域的一些探讨和研究。 关键词:单片机;舵机控制; STC12C5410AD
Bipedal robot design based on MCU Abstract:In the 21st century robot development changes with each passing day, from the traditional crawler robot to now bipedal robot, the robot's application scope is more and more widely.This system by single chip microcomputer (STC89c52) as the central controller in the system, STC12c5410ad MCU as the steering gear control module. The central controller and the servo controller, Steering gear, all kinds of sensing and control components such as organic combination, make up the whole bipedal robot, the purpose of to walk, do the action.Single chip microcomputer central controller and the servo controller to realize serial communication way.System hardware design, the main hardware servo controller and STC89C52 single-chip microcomputer and peripheral circuit in detail. Hardware including servo controller, STC12C5410AD micro controller, buttons, all kinds of sensor and data acquisition and processing unit. Software includes MCU initialization, the main program, and interrupts program signal collection, through a serial port communication to send and receive procedures. The last part of the paper on the basis of bipedal robot, combined with the sensor, the peripheral control device of control system, this system is also given some discussions and research in the field of application. Keywords:MCU; Servo Control; STC12C5410AD
摘要 为使机器人完成各种任务和动作所执行的各种控制手段。作为计算机系统中的关键技术,计算机控制技术包括范围十分广泛,从机器人智能、任务描述到运动控制和伺服控制等技术。既包括实现控制所需的各种硬件系统,又包括各种软件系统。最早的机器人采用顺序控制方式,随着计算机的发展,机器人采用计算机系统来综合实现机电装置的功能,并采用示教再现的控制方式。随着信息技术和控制技术的发展,以及机器人应用范围的扩大,机器人控制技术正朝着智能化的方向发展,出现了离线编程、任务级语言、多传感器信息融合、智能行为控制等新技术。多种技术的发展将促进智能机器人的实现。 当今的自动控制技术都是基于反馈的概念。反馈理论的要素包括三个部分:测量、比较和执行。测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。这个理论和应用自动控制的关键是,做出正确的测量和比较后,如何才能更好地纠正系统。 PID(比例-积分-微分)控制器作为最早实用化的控制器已有50多年历史,现在仍然是应用最广泛的工业控制器。PID控制器简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器。 它由于用途广泛、使用灵活,已有系列化产品,使用中只需设定三个参数(Kp,Ti 和Td)即可。在很多情况下,并不一定需要全部三个单元,可以取其中的一到两个单元,但比例控制单元是必不可少的。 关键词:机器人,机器人控制,PID,自动控制
目录 摘要.......................................................... I 第1章绪论................................................ - 1 - 1.1机器人控制系统 (1) 1.2机器人控制的关键技术 (1) 第2章机器人PID控制...................................... - 2 - 2.1PID控制器的组成 (2) 2.2PID控制器的研究现状 (2) 2.3PID控制器的不足 (3) 第3章 PID控制的原理和特点 ................................ - 4 - 3.1PID控制的原理 (4) 3.2PID控制的特点 (5) 第4章 PID控制器的参数整定 ................................ - 5 -后记...................................................... - 6 -
小学数学应用题大全 六年级数学应用题1 一、分数的应用题 1、一缸水,用去1/2和5桶,还剩30%,这缸水有多少桶? 2、一根钢管长10米,第一次截去它的7/10,第二次又截去余下的1/3,还剩多少米? 3、修筑一条公路,完成了全长的2/3后,离中点16.5千米,这条公路全长多少千米? 4、师徒两人合做一批零件,徒弟做了总数的2/7,比师傅少做21个,这批零件有多少个? 5、仓库里有一批化肥,第一次取出总数的2/5,第二次取出总数的1/3少12袋,这时仓库里还剩24袋,两次共取出多少袋? 6、甲乙两地相距1152千米,一列客车和一列货车同时从两地对开,货车每小时行72千米,比客车快2/7,两车经过多少小时相遇? 7、一件上衣比一条裤子贵160元,其中裤子的价格是上衣的3/5,一条裤子多少元? 8、饲养组有黑兔60只,白兔比黑兔多1/5,白兔有多少只? 9、学校要挖一条长80米的下水道,第一天挖了全长的1/4,第二天挖了全长的1/2,两天共挖了多少米?还剩下多少米? 六年级数学应用题2 二、比的应用题 1、一个长方形的周长是24厘米,长与宽的比是2:1 ,这个长方形的面积是多少平方厘米? 2、一个长方体棱长总和为96 厘米,长、宽、高的比是3∶2 ∶1 ,这个长方体的体积是多少? 3、一个长方体棱长总和为96 厘米,高为4厘米,长与宽的比是 3 ∶2 ,这个长方体的体积是多少? 4、某校参加电脑兴趣小组的有42人,其中男、女生人数的比是4 ∶3,男生有多少人? 5、有两筐水果,甲筐水果重32千克,从乙筐取出20%后,甲乙两筐水果的重量比是4:3,原来两筐水果共有多少千克? 6、做一个600克豆沙包,需要面粉红豆和糖的比是3:2:1,面粉红豆和糖各需多少克? 7、小明看一本故事书,第一天看了全书的1/9,第二天看了24页,两天看了的页数与剩下页数的比是1:4,这本书共有多少页? 8、一个三角形的三个内角的比是2:3:4,这三个内角的度数分别是多少? 六年级数学应用题3 三、百分数的应用题 1、某化肥厂今年产值比去年增加了20%,比去年增加了500万元,今年道值是多少万元? 2、果品公司储存一批苹果,售出这批苹果的30%后,又运来160箱,这时比原来储存的苹果多1/10 ,这时有苹果多少箱? 3、一件商品,原价比现价少百分之20,现价是1028元,原价是多少元? 4、教育储蓄所得的利息不用纳税。爸爸为笑笑存了三年期的教育储蓄基金,年利率为5.40%,到期后共领到了本金和利息22646元。爸爸为笑笑存的教育储蓄基金的本金是多少? 5、服装店同时买出了两件衣服,每件衣服各得120元,但其中一件赚20%,另一件陪了20%,问服装店卖出的两件衣服是赚钱了还是亏本了? 6、爸爸今年43岁,女儿今年11岁,几年前女儿年龄是爸爸的20%? 6、比5分之2吨少20%是()吨,()吨的30%是60吨。 7、一本200页的书,读了20%,还剩下()页没读。甲数的40%与乙数的50%相等,甲数是120,乙数是()。 8、某工厂四月份下半月用水5400吨,比上半月节约20%,上半月用水多少吨? 9、张平有500元钱,打算存入银行两年.可以有两种储蓄办法,一种是存两年期的,年利率是2.43%;一种是先存一年期的,年利率是 2.25%,第一年到期时再把本金和税后利息取出来合在一起,再存入一年.选择哪种办法得到的税后利息多一些?
基于单片机及传感器的机器人设计与实现 摘要:本设计基于单片机及多种传感器,完成了一个自主式移动机器人的制作。单片机作为系统检测和控制的核心,实现对机器人小车的智能控制。反射式红外光电传感器检测引导线,使机器人沿轨道自主行走;使用霍尔集成片,通过计车轮转过的圈数完成机器人行走路程测量;接近开关可探测到轨道下埋藏的金属片,发出声光信息进行指示,并能实时显示金属片距起点的位置。 关键词:单片机; 机器人; 传感器 1前言 机器人技术是融合了机械、电子、传感器、计算机、人工智能等许多学科的知识,涉及到当今许多前沿领域的技术。一些发达国家已把机器人制作比赛作为创新教育的战略性手段。如日本每年都要举行诸如“NHK杯大学生机器人大赛”、“全日本机器人相扑大会”、“机器人足球赛”等各种类型的机器人制作比赛,参加者多为学生,旨在通过大赛全面培养学生的动手能力、创造能力、合作能力和进取精神,同时也普及智能机器人的知识.[1] 开展机器人的制作活动,是培养大学生的创新精神和实践能力的最佳实践活动之一,特别是机电专业学生开展综合知识训练的最佳平台。本文针对具有引导线环境下的路径跟踪这一热点问题,基于单片机控制及传感器原理,通过硬件电路制作和软件编程,制作了一个机器人,实现了机器人的路径跟踪和自动纠偏的功能,并能探测金属,实时显示距离。 2机器人要完成的功能 选取一块光滑地板或木板,上面铺设白纸,白纸上画任意黑色线条(线条不要交叉),作为机器人行走的轨迹,引导机器人自主行走。纸下沿黑线轨迹随机埋藏几片薄铁片,铁片厚度为0.5~1.0mm。机器人沿轨迹行走一周,探测出埋藏在纸下铁片,发出声光报警,并显示铁片距离起点的位置。 3 硬件设计方案 机器人总体构成
哈工大机电工程学院硕士研究生课程《机器人控制的实际应用》
课程学习指导、思考题与习题
哈工大机电工程学院机械设计系仿生仿人机器人及其智能运动控制研究室 教授、博导 吴伟国 编写 2009 年 9 月
第一部分:学习指导
第一章 绪论——机器人操作臂理论与技术基础概述
一、教学目的和教学要求
通过本章学习, 重点掌握本课程研究的工业机器人操作臂在目前机器人技术 发展概况、 本课程所讲述的工业机器人操作臂所处的应用技术较成熟的第 2 代机 器人位置、机器人操作臂的机构构成、机器人控制所需的基本方法概述、本课程 内容的构成。
二、教学内容和重点知识解析
主要讲授:机器人操作臂理论与技术基础概述 重点知识解析: 1、机器人操作臂的发展现状综述; 2、机器人操作臂的基本构成; 3、机器人操作臂的基本控制方法(本课程内容的构成)
第二章
机器人操作臂运动学
一、教学目的和教学要求
通过本章学习,重点掌握机器人操作臂机构的构成、位置表示、坐标变换、 正运动学和逆运动学等机器人操作臂控制所需的基础知识, 从而通过本章学习达 到将机器人操作臂末端操作器运动与各关节运动之间的关系上升到位置表示、 数 学关系表达、求解方法的理论程度,为实际的编程做好理论准备。要求学员具备 矢量、矩阵等线性代数基础、机械原理有关机构、运动副、自由度等基本概念和 基础知识。
二、教学内容和重点知识解析
-11
主要讲授:机器人操作臂运动学的基本概念、分析方法、逆运动学求解方法 重点知识解析: 1、机器人机构与位置、姿态表示:关节、自由度、机构、末端操作器位姿; 2、坐标系的表示和坐标变换:各种坐标系表示、回转/平移/齐次变换矩阵、 D-H 参数法及关节坐标系建立; 3、正运动学:什么是正运动学(或运动学正问题)?矩阵齐次变换法、解 析法、实例; 4、逆运动学;何谓逆运动学(或运动学逆问题)?几何法、矩阵齐次变换 法、实例等。
第三章
机器人操作臂动力学
一、教学目的和教学要求
通过本章学习,重点掌握机器人动力学研究的意义和必要性、用拉格朗日方 程推导机器人操作臂的运动方程式、机器人操作臂动力学的牛顿-欧拉法等主要 内容,为设计基于模型的控制器做好理论准备。
二、教学内容和重点知识解析
主要讲授:机器人操作臂运动方程式建立、各参数物理意义及不确定性参数 重点知识解析: 1、何谓动力学?为什么要研究机器人操作臂动力学? 2、拉格朗日方程法及运动方程式; 3、用拉格朗日法推导运动方程式的两个实例; 4、牛顿—欧拉法简介及两种方法比较。
第四章
机器人操作臂参数识别
一、教学目的和教学要求
通过本章学习,重点掌握机器人操作臂参数识别的必要性、原理与方法,为 建立实际工业机器人操作臂(所谓“实际”指的是已经制造成为样机实体或购买 到的机器人操作臂产品) 较为准确的动力学模型做好获得各项物理参数的准备工 作。
二、教学内容和重点知识解析
-22
科目代码:876 科目名称:农业机械化管理学 第一部分: 考试说明 一、考查目标 《农业机械化管理学》以农业科学理论为基础,以农业生产信 息为对象,以计算机技术为支撑,研究现代信息技术在农业领域中应用的理论与方法,目的是为农业生产、经营管理、科学研究和技术推广提供新的思路、手段和途径。 二、考试的学科范围 本课程的考试包括农业机械化管理的基本原理和方法,农机化 作业机组的编制与组织管理,机械化作业工艺方案设计,农业机械化发展规划,农业机械系统的选型与配备设计,农业机械作业系统优化,农业机器的技术管理,农业机械化技术经济分析等部分的相关理论与技术。 三、考试形式和试卷结构 1.试卷分值及考试时间 本试卷满分为150分,考试时间为180分钟。 2.考试方式 闭卷笔试形式。 3.试卷内容及结构 考试主要包括农业机械化管理的基本原理和方法,农机化作业 机组的编制与组织管理,机械化作业工艺方案设计,农业机械化发展规划,农业机械系统的选型与配备设计,农业机械作业系统优化,农业机器的技术管理,农业机械化技术经济分析等内容。 题型结构主要包括填空题、选择题、判断题、简答题、综合题 等题型。 第二部分:考试要点 1.绪论及运用原理 了解农业机械化的基本概念、农业机械化发展模式及特点;农 业机器运用管理学的目的和任务;我国农业机械化水平及存在问题;农业机组的动力性能、经济性能及运动性能合理利用的基本概念、理论、原理;牵引力、附着力、工作阻力及牵引功率的计算方法及影响因素;能够合理地进行选型配备。 2.农机技术管理 农业机器计划预防维护制度的内容和制定依据;农业机器试运 转目的及规程;农业机器正确使用、保管的方法,技术诊断的作用、任务和方法。 3.农业机械化管理与组织
用单片机实现语音控制机器人 制作人:潘磊pb02023035 卢恒pb02006088 题目:用凌阳单片机实现语音识别功能并传递给PIC单片机信号,由PIC单片机控制机器人实现动作 关键字:PIC单片机,凌阳单片机,语音控制 单片机在现今生活中占有越来越重要的地位,用语音控制单片机实现控制更具有 广泛的应用价值。用语音控制舞蹈机器人做一些动作是我们这次实现的功能,虽然这 在语音控制方面仍处于起步阶段,但他体现了语音控制的原理和基本实现,也为更高 级的运用打下了基础。 原理: 1.语音识别原理 语音识别电路基本结构如上图所示:语音识别分为特定发音人识别(Speaker Dependent)和非特定发音人识别(Speaker Independent)两种方式。 特定发音人识别是指语音样板由单个人训练,对训练人的语音命令识别准确率较高,而其他人的语音命令识别准确率较低或不识别。非特定发音人识别:是指语音样板由不同年龄、不同性别、不同口音的人进行训练,可以识别一群人的命令。语音样板的提取非常重要。我们将标准模式的存储空间称之为“词库”,而把标准模式称之为“词条”或“样板”。所谓建立词库,就是将待识别的命令进行频谱分析,提取特征参数作为识别的标准模式。 识别过程首先要滤除输入语音信号的噪音和进行预加重处理,提升高频分量,然后用线性预测系数等方法进行频谱分析,找出语音的特征参数作为未知模式,接着与预先存储的标准模式进行比较,当输入的未知模式与标准模式的特征相一致时,便被机器识别,产生识别结果输出。如果输入的语音与标准模式的特征完全一致固然好,但是语音含有不确定因素,完全一致的条件往往不存在,事实上没有人能以绝对相同的语调把一个词说两遍,因此,预先制定好计算输入语音的特征模式与各特征模式的类似程度,或距离度的算法规则固化在ROM
机器人应用论文 一、引言 机器人技术作为20世纪人类最伟大的发明之一,自问世以来,就一直备受瞩目。40余年来,有关它的研究取得了长足的进展。各种形态、功能的机器人相继面世,而未来的机器人将是一种能够代替人类在非结构化环境下从事危险、复杂劳动的自动化机器,是集机械学、力学、电子学、生物学、控制论、计算机、人工智能和系统工程等多学科知识于一身的高新技术综合体。正是由于机器人在多方面应用的可能性,才使得机器人在财会方面也是可以取得成就的。本文拟就机器人的现状与发展前景,探讨机器人发展的多方面可能性。 你初印象中的机器人是什么样子的呢?是不是说一个长的像机器人样子的玩意就是机器人呢?其实说起机器人,我们头脑里马上会联想到那些会唱歌跳舞干工作而且有头有手的小东西。其实那只是机器人的狭意理解。人们提出来机器人的定义是能够感知环境,能够有学习、情感和对外界一种逻辑判断思维的这种机器。人们提出来机器人的定义是能够感知环境,能够有学习、情感和对外界一种逻辑判断思维的这种机器。可以说与人类类比的话,机器人的完整意义应该是一种可以代替人进行某种工作的智能程序化及自动化设备 二、机器人的现状与发展 1.工业机器人技术概念 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。 2.工业机器人技术发展现状 作为人类20世纪最伟大的发明之一,机器人在短短的几十年内发生了日新月异的变化。近几年机器人已成为高技术领域内具有代表性的战略目标。机器人技术的出现和发展,不但使传统的工业生产面貌发生根本性变化,而且将对人类社会产生深远的影响。随着社会生产技术的飞速发展,机器人的应用领域不断扩展。从自动化生产线到海洋资源的探索,乃至太空作业等领域,机器人可谓是无处不在。目前机器已经走进人们的生活与工作,机器人已经在很多的领域代替着
《六年级上学期期末应用题测试卷》 1、一缸水,用去1/2和5桶,还剩30%,这缸水有多少桶? 2?一个长方形的周长是24厘米,长与宽的比是 2:1 ,这个长方形的面积是多少平方厘米? 3?一个长方体棱长总和为 96 厘米,长、宽、高的比是3∶2 ∶1 ,这个长方体的体积是多少? 4、?一个长方体棱长总和为 96 厘米,高为4厘米,长与宽的比是 3 ∶2 ,这个长方体的体积是多少? 5、?有两筐水果,甲筐水果重32千克,从乙筐取出20%后,甲乙两筐水果的重量比是4:3,原来两筐水果共有多少千克? 6?小明看一本故事书,第一天看了全书的1/9,第二天看了24页,两天看了的页数与剩下页数的比是1:4,这本书共有多少页? 7某化肥厂今年产值比去年增加了 20%,比去年增加了500万元,今年产值是多少万元? 8、果品公司储存一批苹果,售出这批苹果的30%后,又运来160箱,这时比原来储存的苹果多1/10 ,这时有苹果多少箱? 9、一件商品,原价比现价少百分之20,现价是1028元,原价是多少元? 10教育储蓄所得的利息不用纳税。爸爸为笑笑存了三年期的教育储蓄基金,年利率为5.40%,到期后共领到了本金和利息22646元。爸爸为笑笑存的教育储蓄基金的本金是多少? 11、服装店同时卖出了两件衣服,每件衣服各得120元,但其中一件赚成本的20%,另一件赔了成本的20%,问服装店卖出的两件衣服是赚钱了还是亏本了? 12、爸爸今年43岁,女儿今年11岁,几年前女儿年龄是爸爸的20%?
13比5分之2吨少20%是()吨,()吨的30%是60吨。 14一本200页的书,读了20%,还剩下()页没读。甲数的40%与乙数的50%相等,甲数是120,乙数是()。 15、某工厂四月份下半月用水5400吨,比上半月节约20%,上半月用水多少吨? 16、?张平有500元钱,打算存入银行两年.可以有两种储蓄办法,一种是存两年期的,年利率是2.43%;一种是先存一年期的,年利率是2.25%,第一年到期时再把本金和税后利息取出来合在一起,再存入一年.选择哪种办法得到的税后利息多一些?(补充:利息税为20%) 17?小丽的妈妈在银行里存入人民币5000元,存期一年,年利率2.25%,取款时由银行代扣代收20%的利息税,到期时,所交的利息税为多少元? 18、?一种小麦出粉率为85%,要磨13.6吨面粉,需要这样的小麦_____吨。 19、画一个周长 12.56 厘米的圆,并用字母标出圆心和一条半径,再求出这个圆的面积。 20、学校有一块圆形草坪,它的直径是30米,这块草坪的面积是多少平方米?如果沿着草坪的周围每隔1.57米摆一盆菊花,要准备多少盆菊花? 21、一个圆和一个扇形的半径相等,圆面积是30平方厘米,扇形的圆心角是36度。求扇形的面积。 22前轮在720米的距离里比后轮多转40周,如果后轮的周长是2米,求前轮的周长。 23一个圆形花坛的直径是10厘米,在它的四周铺一条2米宽的小路,这条小路面积是多少平方米? 24学校有一块直径是40M的圆形空地,计划在正中央修一个圆形花坛,剩下部分铺一条宽6米的水泥路面,水泥路面的面积是多少平方米? 25、有一个圆环,内圆的周长是31.4厘米,外圆的周长是62.8厘米,圆环的宽是多少厘米?
农业机械化生产与管理_在线作业_4 交卷时间:2016-10-10 11:28:16 一、单选题 1. (5分) 汽油机油和柴油机油的最大不同是()不同。? A. 添加剂 ? B. 使用部位 ? C. 黏度 ? D. 基础油 纠错 得分:5 知识点:4.2 农机加油站的管理 展开解析 答案A 解析 2. (5分) 产生“气阻”现象的原因是()。 ? A. 辛烷值高
? B. 抗爆性过好 ? C. 十六烷值高 ? D. 蒸发性过好 纠错 得分:5 知识点:4.2 农机加油站的管理 展开解析 答案D 解析 3. (5分) PDCA循环各阶段的含义为()。? A. 管理—实施—处理—检查? B. 计划—管理—实施—检查? C. 检查—计划—处理—实施? D. 计划—实施—检查—处理纠错 得分:5 知识点:2.3 现代管理理论 展开解析
答案D 解析 4. (5分) 在一定的农业水平下,()对农业机械化的需求越高。 ? A. 农业人口越少 ? B. 农业机械性能越优良、价格越低 ? C. 农业劳动力占总劳动力的比例越低 ? D. 农产品价格越高 纠错 得分:5 知识点:农业机械化生产与管理 展开解析 答案C 解析 5. (5分) 凝点、浊点、冷滤点等都是油品的温度指标,其温度从高到低的排序是()。? A. 浊点---冷滤点---凝点
? B. 浊点---凝点---冷滤点? C. 凝点----浊点---冷滤点? D. 冷滤点---凝点---浊点纠错 得分:5 知识点:4.2 农机加油站的管理 展开解析 答案A 解析 二、多选题 1. (5分) 我国农业机械化的现状是()。? A. 作物间发展平衡 ? B. 大中型拖拉机多 ? C. 小型拖拉机多 ? D. 作业机具多 ? E. 动力数大 纠错 得分:5
军第一航空学院张宏,王德合 引言 随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器/计数器、并行和串行接口、看门狗、前置放大器、A/D转换器、D/A转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。这种技术促使机器人技术也有了突飞猛进的发展,目前人们已经完全可以设计并制造出具有某些特殊功能的简易智能机器人。 1 设计思想与总体方案 1.1 简易智能机器人的设计思想 本机器人能在任意区域内沿引导线行走,自动绕障,在有光源引导的条件下能沿光源行走。同时,能检测埋在地下的金属片,发出声光指示信息,并能实时存储、显示检测到的断点数目以及各断点至起跑线间的距离,最后能停在指定地点,显示出整个运行过程的时间。 1.2 总体设计方案和框图 本设计以AT89C5l单片机作为检测和控制核心。采用红外光电传感器检测路面黑线及障碍物,使用金属传感器检测路面下金属铁片,应用光电码盘测距,用光敏电阻检测、判断车库位置,利用PWM(脉宽调制)技术动态控制电动机的转动方向和转速。通过软件编程实现机器人行进、绕障、停止的精确控制以及检测数据的存储、显示。通过对电路的优化组合,可以最大限度地利用51单片机的全部资源。
P0口用于数码管显示,P1口用于电动机的PWM驱动控制,P2,P3口用于传感器的数据采集与中断控制。这样做的优点是:充分利用了单片机的内部资源,降低了总体设计的成本。该方案总体方案见图1。 2 系统的硬件组成及设计原理 此系统的硬件部分由单片机单元、传感器单元、电源单元、声光报警单元、键盘输入单元、电机控制单元和显示单元组成,如图2所示。 2.1 单片机单元 本系统采用AT89C51单片机作为中央处理器。其主要任务是扫描键盘输入的信号启动机器人,在机器人行走过程中不断读取传感器采集到的数据,将得到的数据进行处理后,根据不同的情况产生占空比不同的PWM脉冲来控制电机,同时将相关数据送显示单元动态显示,产生声光报警信号。其中,P0用于数码管动态显示,P1.0一P1.5控制2个电机,P1.6、P1.7为独立式键盘接口,P2接传感器,P3.2接计里程的光电码盘,P3.7接声光报警单元,P3.4、P3.5、P3.6接用于显示断点数目的发光二极管。
认识工业机器人 机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多种学科而形成的高新技术,是当代研究十分活跃、应用日益广泛的领域。而且,机器人应用情况是反映一个国家工业自动化水平的重要标志。本次任务的主要内容就是了解工业机器人的现状和发展趋势;通过现场参观,认识工业机器人相关企业;现场观摩或在技术人员的指导下操作ABB工业机器人,了解其基本组成。 一、工业机器人的定义及特点 1.工业机器人的定义 国际上对机器人的定义有很多。 美国机器人协会(RIA)将工业机器人定义为:“工业机器人是用来进行搬运材料、零部件、工具等可再编程的多功能机械手,或通过不同程序的调用来完成各种工作任务的特种装置。” 日本工业机器人协会(JIRA)将工业机器人定义为:“工业机器人是一种装备有记忆装置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动的通用机器。” 在我国1989年的国际草案中,工业机器人被定义为:“一种自动定位控制,可重复编程、多功能的、多自由度的操作机。操作机被定义为:具有和人手臂相似的动作功能,可在空间抓取物体或进行其他操作的机械装置。” 国际标准化组织(ISO)曾于1984年将工业机器人定义为:“机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助于可编程的操作来处理各种材料、零件、工具和专用装置,以执行各种任务。” 2.工业机器人的特点 (1)可编程
生产自动化的进一步发展是柔性自动化。工业机器人可随其工作环境变化的需要而再编程,因此它在小批量、多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统中的一个重要组成部分。 (2)拟人化 工业机器人在机械结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有计算机。此外,智能化工业机器人还有许多类似人类的“生物传感器”,如皮肤型接触传感器、力传感器、负载传感器、视觉传感器、声觉传感器、语音功能传感器等。 (3)通用性 除了专门设计的专用的工业机器人外,一般机器人在执行不同的作业任务时具有较好的通用性。例如,更换工业机器人手部末端执行器(手爪、工具等)便可执行不同的作业任务。 (4)机电一体化 第三代智能机器人不仅具有获取外部环境信息的各种传感器,而且还具有记忆能力、语言理解能力、图像识别能力、推理判断能力等人工智能,这些都是微电子技术的应用,特别是与计算机技术的应用密切相关。工业机器人与自动化成套技术,集中并融合了多项学科,涉及多项技术领域,包括工业机器人控制技术、机器人动力学及仿真、机器人构建有限元分析、激光加工技术、模块化程序设计、智能测量、建模加工一体化、工厂自动化及精细物流等先进制造技术,技术综合性强。 二、工业机器人的历史和发展趋势 1. 工业机器人的诞生 “机器人”(Robot)这一术语是1921年捷克著名剧作家、科幻文学家、童话寓言家卡雷尔·恰佩克首创的,它成了“机器人”的起源,此后一直沿用至今。不过,人类对于机器人的梦想却已延续数千年之久。如古希腊古罗马神话中冶炼之神用黄金打造的机械仆人、希腊神话《阿鲁哥探险船》中的青铜巨人泰洛斯、犹太传说中的泥土巨人、我国西周时代能歌善舞的木偶“倡者”和三国时期诸葛亮的“木牛流马”传说等。而到了现代,人类对于机器人的向往,从机器人频繁出现在科幻小说和电影中已不难看出,科技的进步让机器人不仅停留在科幻故事
人教版六年级数学应用题大全 六年级数学应用题1 一、分数的应用题 1、一缸水,用去1 2 和5桶,还剩30%,这缸水有多少桶? 2、一根钢管长10米,第一次截去它的7 10 ,第二次又截去余下的 1 3 ,还剩 多少米? 3、修筑一条公路,完成了全长的2 3 后,离中点16.5千米,这条公路全长多 少千米? 4、师徒两人合做一批零件,徒弟做了总数的2 7 ,比师傅少做21个,这批 零件有多少个?
5、仓库里有一批化肥,第一次取出总数的2 5 ,第二次取出总数的 1 3 少12袋, 这时仓库里还剩24袋,两次共取出多少袋? 6、甲乙两地相距1152千米,一列客车和一列货车同时从两地对开,货车每小时 行72千米,比客车快2 7 ,两车经过多少小时相遇? 7、一件上衣比一条裤子贵160元,其中裤子的价格是上衣的3 5 ,一条裤子多少 元? 8、饲养组有黑兔60只,白兔比黑兔多1 5 ,白兔有多少只? 9、学校要挖一条长80米的下水道,第一天挖了全长的1 4 ,第二天挖了全长的 1 2 , 两天共挖了多少米?还剩下多少米?
六年级数学应用题2 二、比的应用题 1、一个长方形的周长是24厘米,长与宽的比是 2:1 ,这个长方形的面积是多少平方厘米? 2、一个长方体棱长总和为 96 厘米,长、宽、高的比是3∶2 ∶1 ,这个长方体的体积是多少? 3、一个长方体棱长总和为 96 厘米,高为4厘米,长与宽的比是 3 ∶2 ,这个长方体的体积是多少? 4、某校参加电脑兴趣小组的有42人,其中男、女生人数的比是 4 ∶3,男生有多少人?
5、有两筐水果,甲筐水果重32千克,从乙筐取出20%后,甲乙两筐水果的重量比是4:3,原来两筐水果共有多少千克? 6、做一个600克豆沙包,需要面粉、红豆和糖的比是3:2:1,面粉、红豆和糖各需多少克? 7、秀明看一本故事书,第一天看了全书的1 9 ,第二天看了24页,两天看了的 页数与剩下页数的比是1:4,这本书共有多少页? 8、一个三角形的三个内角的比是2:3:4,这三个内角的度数分别是多少?
题型:单选、判断、简答、计算题(作业题)、综合分析(单缸柴油机测功) 农机化管理自测题: 一、单项选择题 1.当牵引功率下降到某一程度,发动机接近熄火,这时的牵引力称为该档的( B ) A.最小牵引力 B.最大牵引力 C.有效牵引力 D.额定牵引力 2.在允许滑转率下,土壤受切线力作用时,对驱动装臵产生的最大反力称为( C ) A.最大阻力 B.最大粘附力 C.最大附着力 D.最大牵引力 3.牵引力利用系数作为评价拖拉机负荷程度的指标,它是在某作业档次下,农具的( B ) A.阻力与拖拉机额定牵引力之比 B.牵引阻力与拖拉机额定牵引力之比 C.牵引阻力与拖拉机牵引力之比 D.拖拉机额定牵引力与牵引阻力之比 4.牵引式机组的负荷程度可用( A ) A.牵引力利用系数表示 B.牵引功率利用率表示 C.牵引阻力利用系数表示 D.牵引效率利用率表示 5.在选用汽油时,依据是发动机的( C ) A.辛烷值 B.燃点 C.压缩比 D.闪点 6.闪点是油料在一定条件下加热,液面上蒸汽和空气组成的混合物,当与明火接近时,即开始闪火的最低温度。闪点在45℃以下的油料称( B ) A.可燃性油料 B.易燃性油料 C.挥发性油料 D.易着性燃料 7.选用柴油时应根据不同季节和当地气温条件进行,一般是选用柴油的凝点低于当地季节最低温度( A ) A.3~5℃左右 B.5~7℃左右 C.6~8℃左右 D.7~9℃左右 8.农业生产过程中,机组的劳动量消耗是指( A ) A.机组直接工作人员和辅助人员的劳动 B.机组直接工作人员的劳动 C.机组作业人员的劳动 D.机组准备人员的劳动 9.农业机械边际分析是利用投入产出原理,在一定生产技术条件下,用生产资源的投入和产品的产出间的( B ) A.直接比率来反映B.动态比率来反映 C.间接比率来反映 D.有效比率来反映 10.农机设备更新期的基本原理是更新(D) A.不变成本原理 B.总成本原理 C.固定成本原理 D.平均成本原理 11.评价农业机械化经济效果的工具和尺度是农业机械化( B ) A.使用经济效果的指标 B.技术经济效果的指标 C.技术经济效益的指标 D.成本经济效益的指标 12.反映农机配备方案的综合性经济效果指标,是指( B ) A.农田机械作业成本 B.作物公斤成本 C.每马力年平均作业量(错) D.使用固定成本 13.盈亏平衡点分析是根据( B ) A.产品质量、产品成本和利润确定的 B.产品数量、产品成本和利润确定的 C.产品数量、产品成本和效益确定的 D.产品品种、产品成本和利润确定的 14.农业机械使用直接经济效果的重要指标是指( D ) A.农业机械资金利用率 B.农机作业成本和各项费用之和 C.农业机械作业社会劳动节约值 D.农业机械投入产出率 15.农业机械推广的主要功能是( D ) A.推广功能、转化功能、服务功能、开发创新功能 B.教育功能、转化功能、研发功能、培训功能 C.服务功能、技术成果转让功能、引进技术功能、技术储备功能 D.教育功能、转化功能、服务功能、开发创新功能 16.拖拉机在坚实的土壤上工作时,决定其推动力大小的是( C ) A.最大切线力 B.最小切线力 C.额定切线力 D.最大附着力