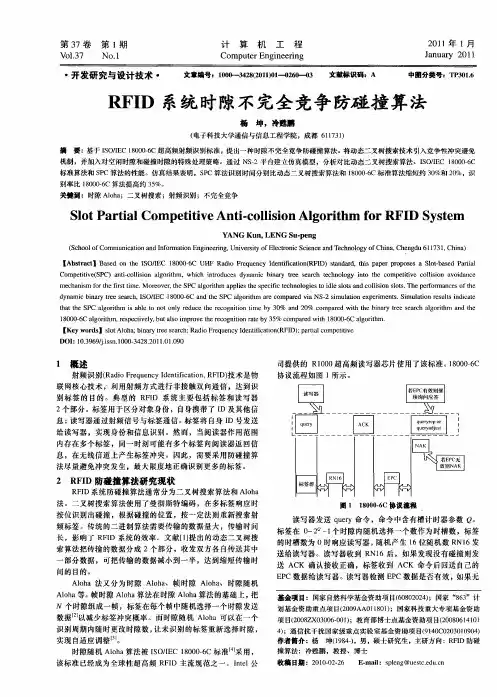
基于时隙的RFID防碰撞算法分析
- 格式:pdf
- 大小:543.31 KB
- 文档页数:4
RFID防碰撞协议原理分析RFID(Radio Frequency Identification)是一种通过无线电波进行自动识别的技术。
它采用无线通信方式,将数据从标签传输到读写器,实现物品的快速识别和跟踪。
在实际应用中,由于多个标签同时进入读写器的通信范围,会产生碰撞问题。
为了解决这一问题,人们发展了RFID防碰撞协议。
本文就要对RFID防碰撞协议的原理进行详细分析。
RFID防碰撞协议主要是为了解决RFID系统中的碰撞问题。
碰撞是指在同一时间点有多个标签同时向读写器发送数据,导致数据的干扰和丢失。
尽管RFID技术的快速识别和追踪功能已经得到了广泛应用,但是在实际场景中,由于标签数量众多,存在碰撞问题是不可避免的。
为了解决碰撞问题,RFID防碰撞协议采用了不同的策略。
主要有以下几种常见的协议:1. ALOHA协议ALOHA协议是最早应用于无线通信的一种简单协议。
在RFID系统中,ALOHA协议通过不间断传输数据的方式实现碰撞检测和恢复。
当标签准备好发送数据时,会以一定概率进行传输。
如果发生碰撞,读写器能够检测到冲突并通过反馈机制通知标签重新发送。
虽然ALOHA协议简单易用,但是由于数据冲突率较高,效率较低。
2. Slotted ALOHA协议为了提高RFID系统的效率,Slotted ALOHA协议在ALOHA的基础上进行了改进。
该协议将时间划分为时隙,标签只能在特定时隙传输数据。
这样做可以减少碰撞率,提高系统吞吐量。
但是,在高标签密度的情况下,仍然存在较高的碰撞概率,效果有限。
3. 查询控制协议查询控制协议是目前应用最广泛的RFID防碰撞协议之一。
该协议主要分为两种:二进制查询算法(Binary Tree Algorithm)和动态查询算法(Dynamic Framed Slotted ALOHA,DFSA)。
二进制查询算法将标签标识号码划分为不同的区间,通过逐级查询检测和区分标签。
首先,读写器发送一个询问帧,包含当前查询的区间信息。
RFID防碰撞算法分析与研究(转载)分类:技术应用关键词:RFID; 防碰撞;Aloha算法;二进制树算法;前言无线射频识别技术 RFID (Radio Frequency Identification)是利用射频信号和空间耦合(电感或电磁耦合)传输特性自动识别目标物体的技术,RFID系统一般由电子标签和阅读器组成。
阅读器负责发送广播并接收标签的标识信息;标签收到广播命令后将自身标识信息发送给阅读器。
然而由于阅读器与所有标签共用一个无线信道,当阅读器识别区域内存在两个或者两个以上的标签在同一时刻向阅读器发送标识信息时,将产生碰撞,致使阅读器不能对一些标签进行识别处理;解决此碰撞的方法称为防碰撞算法。
RFID防碰撞问题与计算机网络冲突问题类似。
但是,由于RFID系统中的一些限制,使得传统网络中的很多标准的防碰撞技术都不适于或很难在RFID系统中应用。
这些限制因素主要有:标签不具有检测冲突的功能而且标签间不能相互通信,因此冲突判决需要由阅读器来实现;标签的存储容量和计算能力有限,就要求防冲突协议尽量简单和系统开销较小,以降低其成本。
RFID系统通信带宽有限,因此需要防碰撞算法尽量减少读写器和标签间传送的信息比特的数目。
因此,如何在不提高RFID系统成本的前提下,提出一种快速高效的防冲突算法,以提高RFID系统的防碰撞能力同时识别多个标签的需求,从而将RFID技术大规模的应用于各行各业,是当前RFID技术亟待解决的技术难题。
现有的标签防冲突算法可以分为基于ALOHA机制算法和基于二进制树机制的算法。
本文将对这两类算法进行详细研究。
并针对如何降低识别冲突标签时延和减少防碰撞次数方面进行改进,在二进制树算法的基础上,结合二进制搜索算法的特点,提出了一种改进的二进制防碰撞算法思想。
1 RFID系统中防碰撞算法1.1 Aloha算法Aloha算法是一种随机接入方法,其基本思想是采取标签先发言的方式,当标签进入读写器的识别区域内就自动向读写器发送其自身的ID号,在标签发送数据的过程中,若有其他标签也在发送数据,那么发生信号重叠导致完全冲突或部分冲突,读写器检测接收到的信号有无冲突,一旦发生冲突,读写器就发送命令让标签停止发送,随机等待一段时间后再重新发送以减少冲突。
《RFID标签防碰撞算法研究》篇一一、引言随着无线通信技术的快速发展,射频识别(RFID)技术已成为现代物流、零售、医疗、交通等众多领域的重要应用之一。
然而,在RFID系统中,多个标签同时响应阅读器时,会引发所谓的“碰撞”问题。
碰撞问题不仅影响了RFID系统的识别效率和准确性,而且可能使整个系统出现工作瘫痪的隐患。
因此,RFID标签防碰撞算法的研究对于提升RFID系统的性能具有重要意义。
本文将重点研究RFID标签防碰撞算法的原理、应用及发展趋势。
二、RFID系统及碰撞问题概述RFID系统主要由阅读器、标签以及通信信道组成。
在阅读器和标签之间的数据传输过程中,若存在多个标签同时向阅读器发送信号,将导致阅读器接收到的信号相互干扰,从而无法正确解析出每个标签的信息,这就是所谓的碰撞问题。
碰撞问题主要分为两类:标签与阅读器之间的碰撞和标签之间的碰撞。
本文研究的重点在于标签间的防碰撞算法。
三、RFID标签防碰撞算法原理为了解决RFID标签碰撞问题,研究者们提出了多种防碰撞算法。
这些算法主要基于ALOHA类算法和树形算法两大类。
1. ALOHA类算法:ALOHA算法是一种随机性的算法,包括纯ALOHA、时隙ALOHA等变种。
其基本思想是通过随机化操作,如随机退避和重传,来避免标签间的信号冲突。
当检测到碰撞时,系统会命令相关标签在随机时间后再次尝试发送。
2. 树形算法:树形算法则是一种确定性的算法,其基本思想是将标签组织成树形结构,逐层进行信息传输和识别,直至找到唯一的标签信息。
常见的树形算法包括二进制搜索树算法(Binary Search Tree)和查询树算法(Query Tree)等。
四、RFID标签防碰撞算法应用RFID标签防碰撞算法在物流、零售、医疗、交通等领域有着广泛的应用。
例如,在物流领域,RFID技术可用于货物追踪和管理,防碰撞算法能提高货物识别效率,减少出错率;在医疗领域,RFID技术可用于病人管理和医疗器械追踪,防碰撞算法能确保信息的准确性和实时性;在交通领域,RFID技术可用于车辆识别和交通管理,防碰撞算法能提高道路交通的智能化水平。
分组部分时隙帧预测的RFID防碰撞算法吴垚;霍亮生;刘玉德;顾祖宝【摘要】针对最大帧长度受限情况下射频识别中的标签碰撞问题,提出分组部分时隙帧预测ALOHA算法。
通过分组操作,限定每次待识别标签数在最大帧长的有效识别范围内。
采用部分时隙帧预测,若部分时隙的碰撞或空闲比例超过门限值,则立即调整帧长,从而减少使用的时隙数。
实验结果表明,该算法能有效降低使用的时隙数,提高系统识别效率,在标签大量动态变化的情况下,平均识别率可达35.58%,具有良好的适用性。
%To solve the tags collision problem in Radio Frequency Identification( RFID) system where the maximum size of frame is limited, this paper proposes a new Grouping Part time Slot frame Prediction ALOHA ( GPSPA ) algorithm. Tags are divided into smaller groups considering the limited frame size ’ s capability. Part slots prediction scheme is used in identification to decide whether to changethe frame size immediately. If the empty or collision slots percentage exceeds the threshold value, the frame size is changed promptly. Simulation results show that the proposed algorithm can increase the system efficiency and consume fewer slots than previous work. Besides,the influence of the parameters of the algorithm is discussed by simulation tests. The system identification efficiency can maintain 35. 58% , approximating to the limit value, where dynamic tags are changing greatly. The proposed algorithm provides a good solution for RFID systems where the tags are changing within a wide range and the frame size is limited.【期刊名称】《计算机工程》【年(卷),期】2014(000)009【总页数】4页(P280-283)【关键词】射频识别;防碰撞;动态帧时隙ALOHA;部分时隙;随机数【作者】吴垚;霍亮生;刘玉德;顾祖宝【作者单位】北京工商大学材料与机械工程学院,北京100048;北京工商大学材料与机械工程学院,北京100048;北京工商大学材料与机械工程学院,北京100048;北京工商大学材料与机械工程学院,北京100048【正文语种】中文【中图分类】TP391近几年来,随着物联网(Internet of Things,IOT)的兴起,作为其重要支撑的射频识别(Radio Frequency Identification,RFID)技术得到了重视,在物流、零售、工业自动化等领域发展迅速。
RFID多标签防碰撞算法研究作者:贾秀美来源:《科技资讯》2012年第36期摘要:把RFID电子标签附着在目标物体上,利用RFID阅读器读取电子标签的信息可以实现物体位置的确定。
但是多个标签同时向阅读器发送信号时,就会发生碰撞,因此,在RFID系统中加入标签防碰撞算法,使阅读器正确、高效地读取标签信息尤为重要。
本文介绍了ALOHA算法及其改进算法,并找出了改进算法中的一些待解决问题。
关键词:防碰撞时隙动态ALOHA算法中图分类号:TP301.6 文献标识码:A 文章编号:1672-3791(2012)12(c)-0020-02RFID技术是一种非接触自动识别技术,它利用无线射频信号在阅读器和电子标签之间进行双向数据传输。
同一时刻可能有多个标签向阅读器发送数据造成信号干扰,这称为标签碰撞。
因此,需要一种防碰撞技术来解决信号干扰问题,解决碰撞的算法称为防碰撞算法。
传统的解决碰撞问题的方法有四种:空分多址(SDMA)法、频分多址(FDMA)法、码分多址(CDMA)法和时分多址(TDMA)法[1]。
目前,时分多址(TDMA)法是射频识别系统解决碰撞问题的常用方法[2]。
本文主要研究基于TDMA的不确定性碰撞算法ALOHA算法及其改进算法。
1 ALOHA算法1.1 纯ALOHA算法纯ALOHA算法是最简单的随机防碰撞算法。
纯ALOHA算法中标签随机的选择一个时间点发送数据。
如果该标签不被识别,即有碰撞发生,那么该标签就会随机退避一段时间,独立地再次选择一时间点重新发送数据,直至成功。
如图1是纯ALOHA算法的模型。
纯ALOHA算法存在的问题是:如果退避区间太大,识别标签所需要的时间会很长;如果退避区间很小,会导致碰撞的次数增加,需要退避的次数就多,这样不但识别效率很低,而且识别时间也没有改善。
纯ALOHA算法简单易行,但只能获得18.4%的吞吐率[1]。
1.2 时隙ALOHA算法在纯ALOHA算法的基础上,人们引入时隙ALOHA算法。
《基于动态防碰撞算法的动态RFID系统》篇一一、引言随着无线通信技术的快速发展,射频识别(RFID)技术已成为现代物流、生产制造、零售等领域的核心技术之一。
然而,在多标签环境下,RFID系统面临着严重的标签碰撞问题,即多个标签同时响应阅读器的请求,导致数据传输的混乱和丢失。
为了解决这一问题,本文提出了一种基于动态防碰撞算法的动态RFID 系统,以实现高效、准确的标签识别和数据传输。
二、RFID系统概述RFID(Radio Frequency Identification)是一种通过无线电信号进行数据传输和识别的技术。
其基本原理是通过射频信号及其空间耦合、传输特性,实现对目标的自动识别。
在RFID系统中,阅读器负责发送信号和接收来自标签的响应,而标签则通过内部芯片存储信息并对外发送。
三、动态防碰撞算法在多标签环境下,动态防碰撞算法是解决标签碰撞问题的关键。
本文所提出的动态防碰撞算法,主要基于ALOHA算法及其改进算法,通过动态调整参数和策略,实现对标签的快速识别和数据的准确传输。
具体而言,该算法通过实时监测信道状态和标签响应情况,动态调整时隙大小和读取策略,从而有效地降低碰撞概率,提高系统性能。
四、基于动态防碰撞算法的动态RFID系统设计本文设计的基于动态防碰撞算法的动态RFID系统主要包括阅读器、标签和数据处理中心三个部分。
其中,阅读器负责发送信号和接收标签响应,标签存储了需要识别的信息,而数据处理中心则负责处理接收到的数据并进行分析和存储。
在系统设计过程中,我们采用了动态防碰撞算法来优化标签识别和数据传输过程。
具体而言,我们通过实时监测信道状态和标签响应情况,动态调整时隙大小和读取策略,以实现对标签的快速识别和数据的准确传输。
此外,我们还采用了加密技术和数据完整性校验等技术手段,确保数据传输的安全性和可靠性。
五、实验与分析为了验证本文所提出的基于动态防碰撞算法的动态RFID系统的性能,我们进行了实验分析。
RFID防碰撞算法综述【摘要】射频识别技术RFID是目前正快速发展的一项新技术,它通过射频信号进行非接触式的双向数据通信,从而达到自动识别的目的。
随着RFID技术的发展,如何实现同时与多个目标之间的正确的数据交换,即解决RFID系统中多个读写器和应答器之间的数据碰撞,成为了限制RFID技术发展的难题,采用合理的算法来有效的解决该问题,称为RFID系统的防碰撞算法。
采用时分多路存取技术,相关的算法有ALOHA法、时隙ALOHA法、二进制搜索法、动态二进制搜索法等。
在各种算法当中,二进制树算法因为它识别应答器的确定性,成为了应用最广泛的一种,多个国际标准均对其进行了规定,这推动了防碰撞算法的发展,全文针对RFID系统二进制树防碰撞算法,进行了理论与实践方面的探讨。
【关键词】:射频识别;防碰撞算法;读写器;应答器;Abstract: RFID is a newly developed technology which communicates through the non-contact RF signal,so as to achieve objective automatic identification.Along with the development of RFID technology,how to realize Data Exchange accurately among Multiple Targets at the same time becomes the key problem of RFID technology.RFID anti-collision algorithm is the solution to the above mentioned problems.In TDMA, there are several anti-collision algorithms, such as ALOHA, Slotted ALOHA, Binary Search, Dynamic Binary Search and so on.Key Words:RFID;Anti-collision;Read/Write Devices;Transponders1、RFID技术简介自动设备识别技术是目前国际上发展很快的一项新技术,英文名称为Automatic Equipment Identification,简称AEI,它通过一些先进的技术手段,实现人们对各种设备在不同状态下的自动识别和管理。
最常用的防碰撞算法有:
1. 时隙ALOHA算法:通过将时间划分为多段等长的时隙,规定RFID 电子标签只能在每个时隙的开始时向RFID读写器发送数据帧,这样可以提高RFID系统的吞吐率。
2. 二分查找算法:当标签数量确定时,使用二分查找算法能够快速定位到某一特定标签,避免碰撞。
3. 动态帧时隙ALOHA算法:在固定帧时隙ALOHA算法的基础上,根据标签的实际情况动态调整时隙长度,以满足不同场景下的防碰撞需求。
4. 碰撞位检测算法:通过碰撞位检测技术,能够快速检测到发生碰撞的位,然后采取相应的策略进行碰撞避免或碰撞解决。
5. 树形搜索算法:通过逐层向下搜索的方式,在每一层进行标签的识别,避免在同一层发生碰撞,提高识别的成功率。
6. 虚拟环形防碰撞算法:通过建立虚拟环形空间,将所有标签按照一定的规则排列,然后在环形空间内进行顺序识别,避免了碰撞的发生。
7. 时隙二进制搜索算法:在搜索过程中,通过不断调整时隙长度和二进制的位数,逐渐逼近目标标签,最终实现碰撞避免和标签识别。
8. 动态帧时隙二进制搜索算法:结合了动态帧时隙ALOHA算法和时隙二进制搜索算法的特点,根据实际情况动态调整时隙长度和二进制位数,提高识别效率和准确性。
9. 随机退避策略算法:当发生碰撞时,标签会随机选择一个退避时间进行等待,然后重新发起识别请求。
通过不断随机退避和重试,最终实现标签的识别。
10. 优先级调度算法:根据标签的优先级进行识别,优先级高的标签可以优先获取资源进行识别,避免了碰撞的发生。
这些算法各有特点,适用于不同的应用场景。
在实际应用中,需要根据具体情况选择合适的防碰撞算法来提高RFID系统的性能和可靠性。
RFID防碰撞算法摘要RFID防碰撞算法学习RFID中的碰撞问题主要分为两类:⼀是阅读器碰撞问题,它产⽣于同⼀个物理区域内存在多个不同的阅读器,它们以同⼀频率同时与区域内的标签通信⽽引起的冲突。
另⼀类是标签碰撞问题,如过标签同事处于阅读器的有效⼯作区内时,可能会发⽣多个标签同时发送信号的情况,这时要求阅读器能在很短的时间内识别多个标签,由于阅读器和标签通信共享⽆线信道,阅读器或标签的信号可能发⽣信道争⽤,信号互相⼲扰等问题,使阅读器不能正确识别标签。
在实际使⽤中,多标签碰撞是造成⼲扰的主要原因。
基本多地址接⼊⽅法频分多址FDMA( Frequency Division Multiple Access)是通过使⽤不同的频段,实现信号的同时传输。
对于RFID系统来说,可以使⽤频率可调的电⼦标签。
这样完全可以防⽌碰撞,但是这需要阅读器为每个接收通路配备单独的接收通道,对阅读器的性能要求过⾼,成本过⾼,只适合在特殊场合使⽤。
空分多址SDMA(Space Division Multiple Access)是利⽤空间范围的分割实现通信的同时进⾏。
这是⼀种很古⽼的多址⽅法。
要达到SDMA的效果,要求单个阅读器作⽤范围很⼩,为此,可以把⼤量阅读器和天线覆盖⾯积并排安置在⼀个阵列中,使得单个阅读器的通信容量在相邻的区域内可重复使⽤。
当电⼦标签经过这个阵列时,与之最近的阅读器便可与之通信,由于每个阅读器的影响范围很⼩,使得相邻阅读器⼯作范围内的其他电⼦标签可以正常⼯作不受影响。
空分多址SDMA技术,由于需要安装有⾃适应定向天线的读写器,其复杂度很⾼,成本也过⾼,⽽且识别速度较慢,故此技术仅被应⽤于某些特殊的领域。
码分多址CDMA (Code Division Multiple Access)是最新发展起来的⼀种多址⽅式,它的应⽤范围很⼴,但是却不适合RFID系统。
CDMA技术基于扩频通信,即需要把要传送的信号先扩频,再编码调制,发送的是宽带信号。
一种基于格雷码的双时隙RFID防碰撞算法
邓红卫;李浪;许航
【期刊名称】《福建电脑》
【年(卷),期】2016(032)010
【摘要】针对RFID碰撞问题,提出一种基于格雷码的双时隙防碰撞算法BSGC。
算法查询过程分标签前缀确定和时隙查询2个阶段。
在前缀确定阶段,利用格雷码的编码规则,将一颗庞大的二叉树分成若干细小的分支,快速识别前缀,降低发生碰撞的可能;在查询阶段,通过从队列中取出前缀,快速识别对应的分支,减少空闲时隙的查询次数,提高标签识别速度。
算法分析及仿真结果表明,BSGC算法能够降低碰撞次数和传输时延,提升吞吐率,提高标签的识别效率。
【总页数】4页(P1-4)
【作者】邓红卫;李浪;许航
【作者单位】衡阳师范学院计算机科学与技术学院湖南衡阳 421002; 智能信息处理与应用湖南省重点实验室湖南衡阳 421002;衡阳师范学院计算机科学与技术学院湖南衡阳 421002; 智能信息处理与应用湖南省重点实验室湖南衡阳 421002;衡阳师范学院计算机科学与技术学院湖南衡阳 421002
【正文语种】中文
【相关文献】
1.双时隙二进制树堆栈式RFID防碰撞算法 [J], 魏绍蓉;王晓英;刘志强;贾续涵
2.双时隙动态二进制搜索RFID防碰撞算法 [J], 莫磊;陈伟;任菊
3.一种基于时隙ALOHA的RFID系统防碰撞算法 [J], 翟霞晖;唐明浩;金慧芬
4.一种RFID防碰撞算法中降低时隙开销的方法研究 [J], 崔宝才
5.基于转换码的双时隙RFID防碰撞算法 [J], 孙耀磊;吴晓波;陈元文;何航
因版权原因,仅展示原文概要,查看原文内容请购买。
防碰撞算法在RFID 系统中,假设为单个标签完成将其ID 号完整地发送给读写器所需的时间,定义系统负载G 为时长内某读写器识别范围内标签的平均到达数量,吞吐量为时长内与某个读写器成功完成通信的平均标签数量。
ALOHA 时隙算法中,加入频域判读,根据频域反应的标签数量决定时隙的大小,如果标签数是个位,时隙可以减小,如果大于十位,则增大标签发送时隙。
在标签到达服从泊松分布的条件下,吞吐量和系统负载G 具有如式(1)的关系: STSS GSSGe−=⋅ (1)其中表示时隙ALOHA 算法的吞吐量。
由上式,当时,,而且当时,系统将处于不稳定的区域,无法满足某些情况下的实际需要。
ALOHA 系统中平均交换数据包量G 可以用最简单的方法从一个数据包的传输持续时间τ计算出来∑=n n n r T G 1τ式中:n = 1、2、3、…是系统中的应答器的数量,r n = 0、1、2、…是在观察时间T 内由应答器n 发送的数据包的数量。
传输通路的平均吞吐率S ,可由较缓的数据包量G 得出,公式为:G e G S 2-⋅=如果观察交换的数据包量G 和吞吐率S 的关系,那么当G = 0.5时,S 的最大值为18.4%时隙ALOHA ,与简单ALOHA 发相比,可能出现碰撞的时间只有一半那么多。
假设数据包大小一样(因传输时间τ一样),并且两个应答器在时间间隔τ2≤T 内要把数据包传输给阅读器,那么在使用简单的ALOHA 法时总会出现相互碰撞,由于在使用时隙ALOHA 法时数据包的传输总是在同步的时隙内才开始,所以发生碰撞的时间区间缩短到τ=T ,因此,可得出对时隙ALOHA 法的吞吐率为:G e G S -⋅=对时隙ALOHA 法来说,交换数据包量在G=1时吞吐率S 达到最大值为36.8%。
0.184数据包量 G吞吐率STAG1TAG2TAG3接收TAG1TAG2TAG3接收TAG1TAG2TAG3接收F=4F=4F=4TAG1TAG2TAG3??F=2F=4F=6动态帧时隙(DFSA-Dynamic Framed Slotted ALOHA )Nx N x N X r F F C P i x P )()1(}{--==个标签选择时隙 ⎪⎩⎪⎨⎧≥--====2.....11,0.....................0}|{100x P P P x x P i x P x X r 有碰撞发生个标签选择时隙 C N e F ⋅=0泊松分布:随机变量X 可能取值为0,1,2…,而各个取值的概率为:{}!k e k X P k λλ-==其中0>λ是常数,则称X 服从参数为λ的泊松分布。
基于分组动态帧时隙的RFID防碰撞算法
尹君;何怡刚;李兵;邓晓;谭阳红;肖迎群
【期刊名称】《计算机工程》
【年(卷),期】2009(035)020
【摘要】为了解决射频识别(RFID)系统中的多标签防碰撞问题,在分析帧时隙ALOHA算法的基础上,提出一种基于分组动态帧时隙的RFID防碰撞算法.当标签数量庞大时,该算法可以通过分组限制响应标签数量达到较高的识别效率.仿真结果表明,当标签数为1 000时,与传统算法相比,该算法能使时隙利用率提高80%以上.【总页数】3页(P267-269)
【作者】尹君;何怡刚;李兵;邓晓;谭阳红;肖迎群
【作者单位】湖南大学电气与信息工程学院,长沙,410082;湖南大学电气与信息工程学院,长沙,410082;湖南大学电气与信息工程学院,长沙,410082;湖南大学电气与信息工程学院,长沙,410082;湖南大学电气与信息工程学院,长沙,410082;湖南大学电气与信息工程学院,长沙,410082
【正文语种】中文
【中图分类】TP301.6
【相关文献】
1.基于ALOHA的分组动态帧时隙RFID系统防碰撞算法 [J], 李飞高;张贵林
2.基于分组的动态帧时隙ALOHA防碰撞算法 [J], 马耀庭
3.基于碰撞预检测的分组动态帧时隙ALOHA防碰撞算法 [J], 陈卓
4.基于哈希分组的动态帧时隙ALOHA防碰撞算法 [J], 周艳聪;董永峰;张晶;顾军华
5.基于汉明重分组的动态帧时隙ALOHA 防碰撞算法 [J], 杜宗印;章国安;袁红林;杨振
因版权原因,仅展示原文概要,查看原文内容请购买。
《超高频RFID系统中防碰撞算法的改进与测试》篇一一、引言随着物联网技术的飞速发展,超高频RFID(Radio Frequency IDentification)技术在物流、零售、医疗、交通等领域得到了广泛应用。
然而,在多标签环境下,RFID系统面临着严重的标签碰撞问题,这直接影响了系统的读取效率和准确性。
因此,防碰撞算法的改进与测试成为了RFID技术研究的热点。
本文将重点探讨超高频RFID系统中防碰撞算法的改进与测试,旨在提高RFID 系统的性能和可靠性。
二、防碰撞算法概述防碰撞算法是RFID系统中解决标签碰撞问题的关键技术。
在超高频RFID系统中,常见的防碰撞算法包括ALOHA算法、二进制树搜索算法(Binary Tree Search Algorithm)以及动态帧时隙ALOHA算法等。
这些算法通过不同的方式来避免多个标签同时向阅读器发送信号,从而减少标签间的碰撞。
三、现有防碰撞算法的不足虽然现有的防碰撞算法在一定程度上能够解决标签碰撞问题,但仍存在一些不足。
例如,某些算法在标签数量较多时,读取效率会显著下降;某些算法在标签分布不均匀时,可能会出现读取错误或漏读现象;此外,一些算法的实时性较差,无法满足高并发场景下的需求。
因此,对防碰撞算法进行改进是必要的。
四、防碰撞算法的改进针对现有防碰撞算法的不足,本文提出了一种基于动态调整ALOHA算法的改进方案。
该方案通过引入动态帧时隙和标签识别度的概念,实现了对ALOHA算法的优化。
具体来说,该算法能够根据当前系统的负载情况和标签分布情况,动态调整帧时隙的长度和数量,以实现更高的读取效率和准确性。
此外,该算法还采用了一种基于识别度的标签调度策略,使得系统能够优先读取那些容易被误读的标签,从而减少读取错误和漏读现象。
五、测试与分析为了验证改进后的防碰撞算法的性能和可靠性,我们设计了一系列实验进行测试。
首先,我们构建了一个包含多个标签的超高频RFID系统测试平台,并通过模拟不同场景下的标签分布和系统负载情况来进行测试。
RFID系统中的碰撞与防碰撞问题研究RFID系统中的碰撞与防碰撞问题研究摘要:RFID系统的碰撞问题一直是影响系统性能的重要因素,社会对RFID系统可靠性的疑虑也阻碍着RFID技术的进一步开展。
本文对射频识别系统的碰撞和防碰撞问题进行了分析,为更深入的研究提供了根底。
关键词:RFID;防碰撞1、引言RFID射频识别是一种非接触式的自动识别技术。
它利用射频信号的空间耦合或反射特性以到达识别目标、获取数据的作用。
与其他识别技术相比,它具有识别速度快、数据容量大、使用寿命长、动态实时通信等优点,无需人工干预,并可同时识别多个标签。
在得到广泛使用和关注的同时,RFID技术也暴露出数据碰撞等问题。
研究RFID系统的碰撞与防碰撞问题,对于增强系统稳定性和可靠性,推动RFID技术开展有重要意义。
本文对RFID 的防碰撞问题、防碰撞算法进行了简要的描述和分析。
随着本钱的下降和标准化的实施,RFID 技术的全面推广和普遍应用必将是不可逆转的趋势。
2、RFID的碰撞问题RFID技术是一种多目标的自动识别技术,这就不可防止地产生了数据碰撞问题。
碰撞时,阅读器或标签将重新发送请求或接收信号,如此反复不仅浪费了时间、系统资源,也使效率降低,限制了RFID技术的开展。
2.1标签的碰撞当多个标签同时位于一个阅读器的可读范围内,会出现多个标签同一时刻应答或一个标签没有应答完成时另外的标签就应答的情况,降低阅读器接收信号的信噪比,造成通信失败。
2.2阅读器的碰撞2.2.1阅读器-阅读器干扰当阅读器之间距离较近,且一个处于发送状态,另一个处于接收状态时,发送阅读器的发射信号将会对接收阅读器的接收信号产生干扰,造成两个阅读器均无法正常阅读标签。
2.2.2标签干扰当一个标签同时处于多个阅读器的询问区域中时,多个阅读器同时与该标签通信就会产生干扰。
此时标签接收到的信号是多个阅读器发射信号的矢量和,故标签不能正确识别。
3、RFID的防碰撞算法由于阅读器间能够进行通信,且阅读器较之标签功能更为强大,阅读器碰撞问题更容易解决,因此主要关注标签的碰撞问题。
无线射频识别技术(RFID)是一种非接触的自动识别技术,因其具有识别距离远、穿透能力强、多物体识别、抗污染等优点,现已广泛应用于工业自动化、商业自动化、交通运输控制管理、产品证件防伪、防盗等众多领域,成为当前IT业研究的热点技术之一。
RFID系统一般由标签(Tag)和读写器(Reader)两个部分组成。
在系统工作时,当有多个标签同时发送数据时就会出现碰撞,其结果会导致传输失败。
因此需制定适当的防碰撞算法,避免或减少碰撞,从而有效地提高系统性能。
一般防碰撞算法可以分为随机型和决定型。
本文主要研究随机防碰撞算法中常见的两类算法:帧时隙ALOHA算法及其改进型的、时隙随机算法。
1帧时隙ALOHA算法在RFID系统中,帧时隙ALOHA算法的“帧”是由读写器定义的一段时间长度,其中包含若干时隙。
时隙指标签收到读写器命令后,发送标识的时间长度。
标签被随机分配到一个时隙应答,当一个时隙中分配到多个标签时就产生碰撞。
根据帧内时隙数是否变化分为固定帧时隙ALOHA算法和动态帧时隙ALOHA算法。
1.1固定帧时隙ALOHA算法固定帧时隙ALOHA(FFSA)算法是最基本的一种算法,每帧时隙数的大小都一样。
识别过程开始时,由读写器向识别场内所有标签发送一个包含时隙数L的命令。
这些标签收到命令后,将其时隙计数器复位为1,开始记录时隙数,同时从1 ̄L中选择一个数做为其时隙数值。
当时隙计数器值与标签随机选择的时隙数值相同时,标签向读写器发出应答信息。
若标签被读写器成功识别,则退出识别系统。
一个帧完成后,读写器开始时隙数同样为L的新帧。
FFSA算法设计简单,但缺点是如果标签数远远多于固定的时隙数,会产生过多碰撞;反之,会产生较多空闲时隙,造成资源浪费。
只有在标签数与时隙数差不多的一段时间内,系统吞吐率最大。
可见,由于FFSA算法的时隙数不能随着标签数而变化,系统无法获得稳定的吞吐率。
为改善这一缺点,提出一种改进算法———动态帧时隙ALOHA算法。
1.2动态帧时隙ALOHA算法动态帧时隙ALOHA(DFSA)算法是每帧时隙数都会根据标签数的不同而变化。
为获得系统最大吞吐率,DFSA算法需要在识别过程中估算标签数,用以确定匹配时隙数。
在标签总数未知的情况下,当初始时隙数L<16时,第一次读取过程通常不能识别出标签。
因此为节约初始时间,设置初始时隙数Linit=16[1]。
标签估算的方法有很多种[2-4],例如:(1)估算出参与识别的标签总数。
设时隙数为L,标签数为n,则一个帧中碰撞时隙率Cratio=1-(1-1L)n(1+nL-1)[2]。
在读写器识别过程中,已知当前帧时隙数为L,并且可以统计出该帧时隙碰撞率Cratio,采用逼近算法,可以估算出n。
(2)直接估算出未识别的标签数。
当系统达到最大吞吐率时,一个时隙的碰撞率Ctags=0.4180[2],因此一个时隙碰撞的标签数Ctags=1Crate=2.3922[2]。
读写器在识别过程中,统计前一个帧的时隙碰撞数Ncoll,则未识别标签数nest=2.3922×Ncoll。
得到未识别标签估计数nest后,从理论上讲最优的时隙数L应该等于nest[2],但在实际应用中,读写器能够设定的时隙数是定值,通常为1,8,16,32,64,128,256。
因此,读写器需要根据nest从以上几个数中选择一个数作为下一帧的时隙数。
对250个以内不同数目的标签,选择不同时隙数,计算一个帧的吞吐率。
对不同标签数选择吞吐率最大所对应的时隙数如图1所示,得到标签数与匹配时隙数的对应关系如表1所示。
这样就可以在估算出未识别标签数之后,在下一帧中选择匹配的时隙数,从而提高系统吞吐率。
1.3带延迟的帧时隙ALOHA算法帧时隙ALOHA算法中,若帧时隙数远远小于标签基于时隙的RFID防碰撞算法分析*刘佳,张有光(北京航空航天大学电子信息工程学院,北京100083)摘要:介绍了几种常见的基于时隙的防碰撞算法:帧时隙ALOHA算法和时隙随机算法,并通过仿真,比较分析这些算法识别所用总时隙和对系统吞吐性能的影响。
关键词:RFID防碰撞时隙*国家863计划:无线射频关键技术研究与开发,编号:2005AA420050Lnest10 ̄182 ̄111612 ̄223223 ̄456446 ̄8912890 ̄176256>176表1时隙数与标签数的对应关系数,在匹配前系统吞吐率很低。
为了在时隙数与标签数匹配前,提高当前帧的吞吐率,引入了延迟机制,即当标签随机选择的时隙数与时隙计数器数值相同时,标签并不立即应答读写器,而是延迟若干时隙(从0 ̄7的范围内选择)后再发出应答信息[5]。
图2是设定初始时隙为16,对比不同标签数(标签数大于16)下第一个帧的吞吐率。
由图2看出,带延迟的算法的确可以提高一帧的吞吐率,然而延迟算法只有在标签数多而时隙数少的情况下才有利于提高系统吞吐率。
在相反的情况下,延迟算法在减少碰撞时隙的同时,产生过多的空闲时隙,不能提高系统的吞吐率。
1.4分组帧时隙ALOHA算法帧时隙ALOHA算法局限于每帧最大时隙数为256。
当标签数远远大于256时,系统无法通过增大时隙数来提高吞吐率。
为解决这个问题,在DFSA算法的基础上提出分组帧时隙ALOHA算法(GFSA)。
参考文献[3]中说明,当标签数多于354时将全部标签分成两组或者更多组,读写器分别对每组标签进行识别,从而可以很好地提高系统的吞吐率。
图3为普通DFSA算法与分组GFSA算法在标签数多于400时识别所用的总时隙数的比较,初始时隙设为256。
图3的结果表明,标签数越多,分组算法GFSA的优越性越明显。
但是这种算法需要在原有的DFSA算法上做很多修改,例如读写器命令需要加入分组参数,标签需要确定并保存自己的分组序号,这使得实现变得有些困难。
2时隙随机算法(SR)时隙随机算法没有帧的概念,取而代之的是识别周期。
识别周期是指读写器两次发送开始识别命令(Query)的时间间隔。
SR算法同样是令标签选择时隙应答,但区别在于,帧时隙ALOHA算法在一个帧所有时隙完成之后才能更改时隙数,使未识别标签重新选择时隙;而SR算法在一个识别周期内可以随时更改时隙数,让未识别标签重新选择,实现了时隙数的自适应过程。
以ISO/IEC18000-6TypeC[5]为例,识别过程由读写器发送Query命令开始,命令包含时隙参数Q。
标签从0 ̄2Q-1范围内随机选择一个数作为自己的槽计数器值。
当槽计数器值等于0时,标签应答。
若标签被读写器成功识别,则退出识别系统。
读写器通过发送开始下一个时隙的命令(QueryRep),令标签的槽计数器值减1,若槽计数器值为0(前一个时隙碰撞的标签),则将其记为最大值(7FFFh)。
当读写器认为需要更改时隙数时,发送更改时隙参数的命令(QueryAdjust),令原有Q值加1或减1,这时标签会重新产生槽计数器值。
时隙数的自适应过程是通过发送QueryAdjust命令实现的。
读写器根据几个时隙的识别情况(而非一个周期),增加或减少时隙参数Q,使之能够及时有效地反映标签数的动态变化。
一种简单的Q值算法是在读写器中设计一个参数Qfp作为Q的浮点数。
每次读写器都根据标签的应答情况更改Qfp值,然后将Qfp四舍五入为一个整数值。
若这个整数不同于之前的Q值,则读写器发送QueryAdjust命令,令Q等于这个整数;否则读写器不改变Q值,发送QueryRep命令。
其过程如图4所示。
其中C为Qfp的变化步长。
一般来说,Q与C成反比,因此可以取C=0.8/Q[6]。
初始时隙数与DFSA算法相同,取16,即Q=4。
3仿真分析图5、图6分别描述了识别一定数目的标签所需要的总时隙数和系统吞吐率。
图中,FFSA128和FFSA256分别代表采用128和256时隙数的固定帧时隙ALOHA算法;DFSAI和DFSAII分别代表采用1.2节第一种标签估计算法和第二种标签估计算法的动态帧时隙ALOHA算法;SR算法代表时隙随机算法,其Q值算法采用第2节所述方法。
从图5、图6中可以看出,若采用时隙数为128的FFSA算法,当标签数超过300时,识别标签所需的时隙总数迅速增长。
同样采用时隙数为256的FFSA算法,时隙总数也呈现迅速增长的趋势。
FFSA算法的系统吞吐率较低而且吞吐性能不稳定。
若采用DFSA算法,识别标签所需的时隙总数略有下降。
当标签数少于600时,系统吞吐率较高而且相对稳定;当标签数大于600时,由于受到最大时隙数256的限制,系统吞吐率开始下降。
此时可以通过GFSA算法提高系统吞吐率。
仿真中采用两种不同估算标签算法的DFSA算法,其性能差不多。
但从实现角度讲,DFSAII算法更好一些,因为它容易实现。
SR算法作为另外一类基于时隙的防碰撞算法,其性能远远优于前面几种算法。
SR算法采用时隙数自适应机制,不仅减少碰撞时隙和空闲时隙产生,而且使碰撞标签可以及时重新参与识别。
SR算法的最大时隙数可达215,在实际应用中,即便识别很大数量的标签时,也不会受到时隙数的限制。
采用SR算法系统吞吐率最高且保持在一个定值左右。
特别在识别很大数量的标签时,SR算法识别标签所用的总时隙数比DFSA算法减少很多。
总之,在RFID系统中,基于时隙的防碰撞算法关心的首要问题都是使时隙数与标签数相匹配,这样才能提高系统吞吐率。
对于文中分析的两类算法,帧时隙ALOHA算法设计简单,适合于识别数量在600个以内的标签;时隙随机算法相对复杂一些,但系统吞吐率高而且性能稳定,特别适合识别很大数量的标签。
参考文献[1]吴晶,熊璋,王晔.利用动态时间槽分配的多目标防冲突射频识别.北京航空航天大学学报,2005,31(6).[2]CHAJR,KIMJH.Novelanti-collisionalgorithmsforfastobjectidentificationinRFIDSystem.The11thInter-nationalConferenceonParallelandDistributedSystems,2005.(下转第100页)(上接第96页)[3]LEESR,JOOSD,LEECW.AnenhanceddynamicframedslottedALOHAalgorithmforRFIDtagidentifica-tion.TheSecondAnnualInternationalConferenceonMo-bileandUbiquitousSystems:NetworkingandServices,2005.[4]VOGTH.MultipleobjectidentificationwithpassiveRFIDtags.DepartmentofComputerScienceSwissFederalInst-ituteofTechnology.2002.[5]ISO/IEC18000-6.[6]CHRISTIANF,MATTHIASW.Comparisonoftransm-issionschemesforframedALOHAbasedRFIDprotocols.TheInternationalSymposiumonApplicationsandtheIn-ternetWorkshops,2005.(收稿日期:2006-11-11)c.200微秒后,NRF2401进入监视状态,等待数据包的到来;d.当接收到正确的数据包(正确的地址和CRC校验码),NRF2401自动把字头、地址和CRC校验位移去;e.NRF2401通过把DR1(这个引脚引起微控制器中断)置高通知微控制器;f.微控制器把数据从NRF2401移出;g.所有数据移完,NRF2401把DR1置低,此时,如果CE为高,则等待下一个数据包,如果CE为低,开始其他工作流程。