【基础知识诱思】
日常生活中我们最常见最熟悉的机械波便是声波了,对于声波大家也最了解.下面请大家考虑一个问题,如果你对着高山喊一声,过一会儿你便会听到回声,此时若在山的另一边有一个人,但此人不会听到你的声音;倘若你对着的不是高山,而是一棵大树,则此时树后面的人会听到你的声音,原因何在?山后面的人听不到你的声音是因为声波没有传到山的后面,大树后的人听到了你的声音是因为声波传到了树的后面,像声波这样传播过程中绕过障碍物传到障碍物后面的这种现象为波的衍射现象.
【重点难点解读】
问题一:发生明显衍射现象的条件
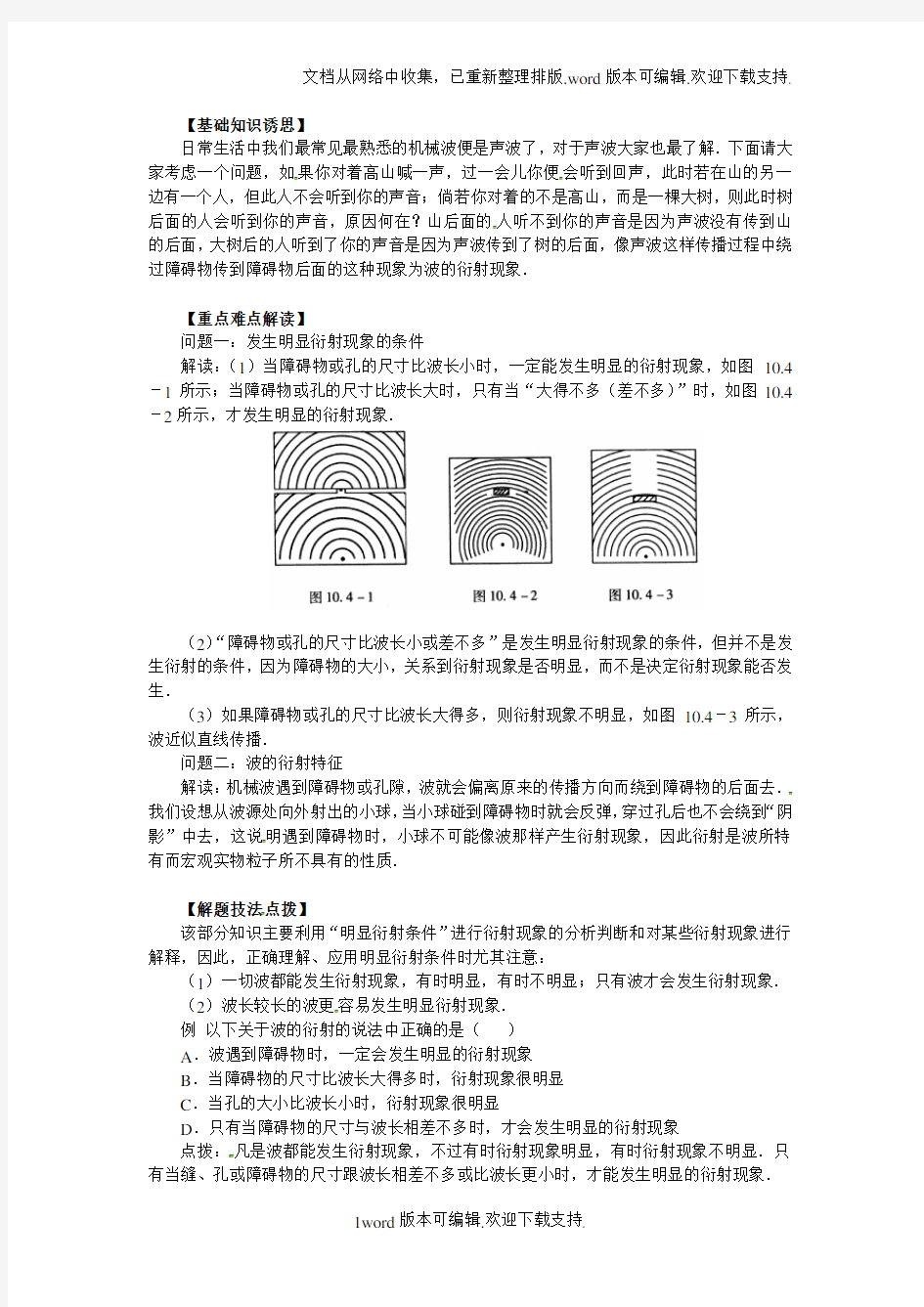
解读:(1)当障碍物或孔的尺寸比波长小时,一定能发生明显的衍射现象,如图10.4-1所示;当障碍物或孔的尺寸比波长大时,只有当“大得不多(差不多)”时,如图10.4-2所示,才发生明显的衍射现象.
(2)“障碍物或孔的尺寸比波长小或差不多”是发生明显衍射现象的条件,但并不是发生衍射的条件,因为障碍物的大小,关系到衍射现象是否明显,而不是决定衍射现象能否发生.
(3)如果障碍物或孔的尺寸比波长大得多,则衍射现象不明显,如图10.4-3所示,波近似直线传播.
问题二:波的衍射特征
解读:机械波遇到障碍物或孔隙,波就会偏离原来的传播方向而绕到障碍物的后面去.我们设想从波源处向外射出的小球,当小球碰到障碍物时就会反弹,穿过孔后也不会绕到“阴影”中去,这说明遇到障碍物时,小球不可能像波那样产生衍射现象,因此衍射是波所特有而宏观实物粒子所不具有的性质.
【解题技法点拨】
该部分知识主要利用“明显衍射条件”进行衍射现象的分析判断和对某些衍射现象进行解释,因此,正确理解、应用明显衍射条件时尤其注意:
(1)一切波都能发生衍射现象,有时明显,有时不明显;只有波才会发生衍射现象.(2)波长较长的波更容易发生明显衍射现象.
例以下关于波的衍射的说法中正确的是()
A.波遇到障碍物时,一定会发生明显的衍射现象
B.当障碍物的尺寸比波长大得多时,衍射现象很明显
C.当孔的大小比波长小时,衍射现象很明显
D.只有当障碍物的尺寸与波长相差不多时,才会发生明显的衍射现象
点拨:凡是波都能发生衍射现象,不过有时衍射现象明显,有时衍射现象不明显.只有当缝、孔或障碍物的尺寸跟波长相差不多或比波长更小时,才能发生明显的衍射现象.
答案:C
【经典名题探究】
考点一:明显衍射条件和衍射特征
例1 下列说法正确的是()
A.只有横波能发生衍射,纵波不能发生衍射
B.当波长比孔的宽度小得越多时,波的衍射越明显
C.声波能发生衍射现象,光不能发生衍射现象
D.声波易发生明显的衍射现象,光不易发生明显的衍射现象
分析:衍射是波特有的现象,一切波都能产生衍射现象,所以A错;光也是一种波,因而光也能发生衍射现象,所以C错;只有当障碍物或小孔的尺寸跟波长差不多或更小时,才会发生明显的衍射现象,所以B错误;由于声波的波长较大,所以易发生明显的衍射现象,而光波的波长较小,所以很难观察到光波的明显衍射现象,D正确.
答案:D
探究:一切波都能发生衍射现象,只有明显与不明显之分,波长较大的波易观察到明显衍射现象.日常中能观察到哪些波的衍射现象?(例:声波、水波)
姊妹题下列说法正确的是()
A.衍射是一切波特有的现象
B.对同一列波,障碍物或孔越小衍射越明显
C.听到回声是声波的衍射现象
D.听到墙外人的说话声是衍射现象
答案:ABD
考点二:灵活运用明显衍射的条件
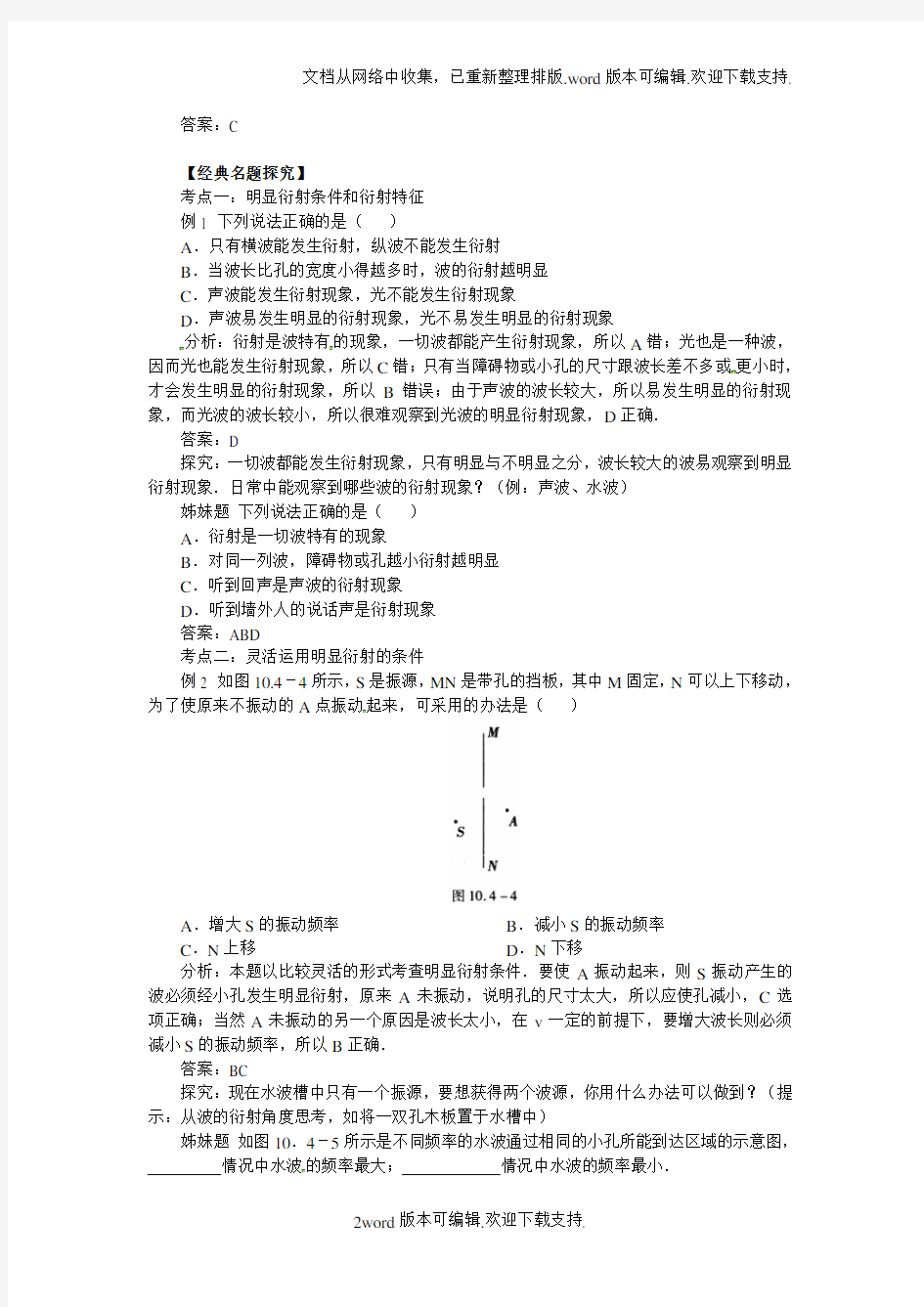
例2 如图10.4-4所示,S是振源,MN是带孔的挡板,其中M固定,N可以上下移动,为了使原来不振动的A点振动起来,可采用的办法是()
A.增大S的振动频率B.减小S的振动频率
C.N上移D.N下移
分析:本题以比较灵活的形式考查明显衍射条件.要使A振动起来,则S振动产生的波必须经小孔发生明显衍射,原来A未振动,说明孔的尺寸太大,所以应使孔减小,C选项正确;当然A未振动的另一个原因是波长太小,在v一定的前提下,要增大波长则必须减小S的振动频率,所以B正确.
答案:BC
探究:现在水波槽中只有一个振源,要想获得两个波源,你用什么办法可以做到?(提示:从波的衍射角度思考,如将一双孔木板置于水槽中)
姊妹题如图10.4-5所示是不同频率的水波通过相同的小孔所能到达区域的示意图,情况中水波的频率最大;情况中水波的频率最小.
答案:c a
考点三:综合考查对明显衍射条件的理解
例3 已空车气中的声速为340m/s ,现有几种声波:(1)周期为201s ;(2)频率为104Hz;(3)波长为10m .它们传播时若遇到宽度约为13m 的障碍物,发生明显衍射现象的是( )
A .(1)和(2)
B .(2)和(3)
C .(1)和(3)
D .都可以 分析:考查发生明显衍射现象的条件.首先由v=λ·f =
T λ计算各种波的波长.题中三种声波的波长分别为λ1=vT =340×201m =17m ;λ2=f v =0.034m ;λ3=10m .因为λ1大于障碍物的宽度,所以能发生明显衍射现象,λ2远小于障碍物的宽度,因而不能发生明显的衍射现象;λ3与障碍物的宽度相差不多,也能发生明显衍射现象,所以C 正确.
答案:C
探究:如何判断一列波能否“绕”过障碍物或小孔?(障碍物或小孔的尺寸与波长相差不多或比波长更小时)
姊妹题 在用水波槽做衍射实验时,若打击水面的振子振动频率是5Hz ,水波在水槽中的传播速度为0.05rn /s ,为观察到明显的衍射现象,小孔的直径d 应为( )
A .10cm
B .5cm
C .d >1cm
D .d <1cm
答案:D
【思维误区诊断】
易错点:产生明显衍射现象的条件是障碍物或小孔的尺寸和波长相差不多或比波长更小,而不是波长和障碍物或小孔相差最小时.
例 有一障碍物的高度为10m ,下列波衍射现象最朋显的是( )
A .波长为40m 的波
B .波长为9.9m 的波
C .频率为40Hz 的声波
D .频率为5000MHz 的电磁波(v =3.0×108m /s )
[误点诊断] 错解:B .波长为9.9m 的波的波长与障碍物的尺寸相差最小,所以衍射最明显,故B 正确.
[名师批答] 题中几列波的波长分别是λA =40m ,λB =9.9m ,λC =40
340m =8.5m ,λD =68
10
5000103??m=0.06m .由波明显衍射条件知,λA = 40m ,大于障碍物的尺寸,而其余波长都小于障碍物的尺寸,所以A 正确.
答案:A
第六部分多普勒天气雷达原理与应用(周长青) 我国新一代天气雷达原理;天气雷达图像识别;对流风暴的雷达回波特征;新一代天气雷达产品 第一章我国新一代天气雷达原理 一、了解新一代天气雷达的三个组成部分和功能 新一代天气雷达系统由三个主要部分构成:雷达数据采集子系统(RDA)、雷达产品生成子系统(RPG)、主用户处理器(PUP)。 二、了解电磁波的散射、衰减、折射 散射:当电磁波束在大气中传播,遇到空气分子、大气气溶胶、云滴和雨滴等悬浮粒子时,入射电磁波会从这些粒子上向四面八方传播开来,这种现象称为散射。 衰减:电磁波能量沿传播路径减弱的现象称为衰减,造成衰减的物理原因是当电磁波投射到气体分子或云雨粒子时,一部分能量被散射,另一部分能量被吸收而转变为热能或其他形式的能量。 折射:电磁波在真空中是沿直线传播的,而在大气中由于折射率分布的不均匀性(密度不同、介质不同),使电磁波传播路径发生弯曲的现象,称为折射。 三、了解雷达气象方程 在瑞利散射条件下,雷达气象方程为: 其中Pr表示雷达接收功率,Z为雷达反射率,r为目标物距雷达的距离。Pt表示雷达发射功率,h为雷达照射深度,G为天线增益,θ、φ表示水平和垂直波宽,λ表示雷达波长,K表示与复折射指数有关的系数,C为常数,之决定于雷达参数和降水相态。 四、了解距离折叠 最大不模糊距离:最大不模糊距离是指一个发射脉冲在下一个发射脉冲发出前能向前走并返回雷达的最长距离,Rmax=0.5c/PRF, c为光速,PRF为脉冲重复频率。 距离折叠是指雷达对雷达回波位置的一种辨认错误。当距离折叠发生时,雷达所显示的回波位置的方位角是正确的,但距离是错误的(但是可预计它的正确位置)。当目标位于最大不模糊距离(Rmax)以外时,会发生距离折叠。换句话说,当目标物位于Rmax之外时,雷达却把目标物显示在Rmax以内的某个位置,我们称之为‘距离折叠’。 五、理解雷达探测原理。 反射率因子Z值的大小,反映了气象目标内部降水粒子的尺度和数密度,反射率越大,说明单位体积中,降水粒子的尺度大或数量多,亦即反映了气象目标强度大。 反射率因子(回波强度): 即反射率因子为单位体积内中降水粒子直径6次方的总和。 意义:一般Z值与雨强I有以下关系: 层状云降水 Z=200I1.6 地形雨 Z=31I1.71 雷阵雨 Z=486I1.37 新一代天气雷达取值 Z=300I1.4 六、了解雷达资料准确的局限性、资料误差和资料的代表性 由于雷达在探测降水粒子时,以大气符合标准大气情况为假定,与实际大气存在一定的差别,使雷达资料的准确度具有一定的局限性,且由于雷达本身性能差异及探测方法的固有局限,对探测目标存在距离折叠及速度模糊现象,对距离模糊和速度模
练习题2 1.业务运行的多普勒天气雷达通常采用体积扫描的方式观测。我国业务运行多普勒雷达通常采用的体描模式(VCP11、VCP21、VCP31)2.多普勒天气雷达与常规天气雷达的主要区别在于:前者可以测量目标物(沿雷达径向速度),从而大大加强了天气雷达对各种天气系统特别是(强对流天气系统)的识别和预警能力。 3.新一代雷达系统对灾害天气有强的监测和预警能力。对台风、暴雨等大范围降水天气的监测距离应不小于(400km)。 4.新一代雷达系统对灾害天气有强的监测和预警能力。对雹云、中气旋等小尺度强对流现象的有效监测和识别距离应大于(150km)。 5.新一代雷达观测的实时的图像中,提供了丰富的有关(强对流天气)信息。 6.新一代雷达速度埸中,辐合(或辐散)在径向风场图像中表现为一个最大和最小的径向速度对,两个极值中心连线和雷达射线(一致)。7.新一代雷达速度埸中,气流中的小尺度气旋(或反气旋),在径向风场图像中表现为一个最大和最小的径向速度对,但中心连线走向则与雷达射线相(垂直)。 8.新一代天气雷达观测采用的是北京时。计时方法采用24小时制,计时精度为秒。 9.速度场(零等值线)的走向不仅表示风向随高度的变化,同时表示雷达有效探测范围内的(冷、暖平流)。 10.在距离雷达一定距离的一个小区域内,通过对该区域内沿雷达径向速度特征的分析,可以确定该区域内的气流(辐合)、(辐散)和(旋转)等特征。 11.天气雷达是用来探测大气中降水区的(位置)、大小、强度及变化
12.气象目标对雷达电磁波的(散射)是雷达探测的基础。 13.气象上云滴、雨滴和冰雹等粒子一般可近似地看作是圆球。当雷达波长确定后,球形粒子的散射情况在很大程度上依赖于粒子直径D 和入射波长λ之比。对于(D远小于λ)情况下的球形粒子散射称为瑞利散射;而(D与λ尺度相当)情况下的球形粒子散射称为(Mie)米散射。 14.多普勒天气雷达使用低脉冲重复频率PRF测(反射率因子),用高脉冲重复频率PRF测(速度)。 15.每秒产生的触发脉冲的数目,称为(脉冲重复频率),用PRF 表示。两个相邻脉冲之间的间隔时间,称为(脉冲重复周期),用PRT表示,它等于脉冲重复频率的(倒)数。 16.降水粒子产生的回波功率与降水粒子集合的反射率因子成(正比)。与取样体积到雷达的距离的平方成(反比)。 17.S波段天气雷达是(10)cm波长的雷达。 18.在天线方向上两个半功率点方向的夹角称为(c波束宽度)。19.在强回波离雷达(较近)时,有可能产生旁瓣造成虚假回波. 20.降水粒子的后向散射截面是随粒子尺度增大而(增大)。 21.0 dBZ、-10dBZ、30dBZ和40dBZ对应的Z值分别为(1)、(0.1)、(1000)、(10000) (mm6/m3)。 22.SA雷达基数据中反射率因子的分辨率为(1km×1°)。 23.写出Z-I关系的表达公式 (b Z ) AI 24.Ze的物理意义是(所有粒子直径的6次方之和)。 25.雷达反射率η是单位体积中,所有降水粒子的(雷达截面之和)。 26.雷达气象方程说明回波功率与距离的(二)次方成反比。
1.结合毕业设计课题情况,根据所查阅的文献资料,撰写2000字左右的文献综述: 文献综述 一、本课题的研究背景及意义 随着我国经济建设的高速发展,人民生活的不断提高,道路上各式各样的车辆数目也在大幅上升,也使得交通违章不断增加,给道路交通和人民的生活带来了极大的威胁。由于汽车工业的不断进步,行驶在道路上的车辆速度越来越快,交通事故发生的频率也不断增加。众所周知,交通事故的发生大部分是由驾驶员的超速驾驶造成的。为提高汽车运行的安全性,减少交通事故的发生以及快速检测车辆行驶中的速度,所以有了测速仪的问世。 随着科技的进步,由雷达传感器制作的测速仪已经广泛应用于车辆测速的行业中,实现对车辆速度准确,快速的测量。该测速仪结构简单,可靠性高,操作方便,可广泛应用于摩托车、汽车等机动车辆的速度测量中。测速仪的发展动向是把测速仪的准确性,稳定性和可靠性作为重要的质量指标。 二、本课题国内外研究现状 我国测速仪的应用和研究起源于八十年代,伴随着我国经济发展,由最初的简单雷达测速仪发展到现在的超声波,激光等多种测速仪,同时在误差补偿,超速报警,便捷等多个方面的研究和发展取得了长足的进步,由以前的单一,简单,笨重的测速仪演变为如今的多样,复杂,小巧,为我国的交通做出了巨大贡献,同时涌现了广州科能,西安光伟等一大批骨干测速仪制造企业,基本上形成了中国测速仪目前的发展格局。 雷达测速仪是根据接收到反射波频移量的计算而得出物体的运动速度,雷达测速易于捕捉目标,无须精确瞄准,可以采用手持的方式,在车辆的运动中进行测速。在中国的雷达测速仪发展中,雷达测速仪越来越向着高精度,高智能,高便捷的方向快速发展。 面对风起云涌的国内外市场及日新月异的中国经济,我国测速仪的发展和应用依然存在着非常严峻的问题。在2010年的国家测速仪调查报告中,我们可以看到我国的测速仪采用国外进口的测速仪占很大的比例,其中居多来自美国,日本。主要是因为我国的测速仪在质量,测量误差,报警设计方面离国外的测速仪还有一定的差距,但在近年的研究中,我国的测速仪发展还是取得了好大的进步。
多普勒天气雷达原理与业务应用试题 1、新一代天气雷达主要有哪三个部分组成? 答:雷达数据采集(RDA )、雷达产品生成(RPG )和主用户处理器(PUP )。 2、雷达数据采集(Radar Data Acquisition )简称RDA ,有哪几部分构成? 答:发射机、天线、接收机和信号处理器。 3、主用户处理器(Principal User Processor )简称PUP ,主要功能是什么? 答:获取、存储和显示产品。 4、新一代天气雷达第一级数据是由接收机输出的模拟数据,第二级数据是由信号处理器产生的最高时空精度的高分辨率数据,称为 基数据 ;第三级数据是由RPG 生成的数据,称为 产品数据 。 5、新一代天气雷达有哪4种常用体扫模式?强对流天气过程中最好使用何种扫描模式? 新一代天气雷达有VCP11、VCP21、VCP31、VCP32四种常用体扫模式。 强对流天气过程中最好使用VCP11体扫模式。 6、雷达气象方程为i i kdr t r r r h G P P 单位体积∑?=-σψπθφλ0 2.02 22210.)2(ln 1024,其中G 表示 天线增益 ,λ表示 雷达波长 , σ表示 粒子的后向散射截面 。 7、在瑞利散射条件下, 单位体积 单位体积 ∑∑= 62 4 5||i i D k λπσ,定义反射率因子单位体积 ∑= 6 i D Z ,则雷达气象方程可表示为C P r Z r 2= ,其中22 23||)2(ln 1024K h G P C t λθφ π=。在不满足瑞利散射条件下,雷达气象方程要表示为同一形式C P r Z r e 2=,则e Z 称为 等效反射率因子 。 8、反射率因子和回波功率的表示形式分别定义为 0 lg 10Z Z dBZ ?=(10=Z 3 6/m mm )和 min lg 10P P dB r ?=,将雷达气象方程 C P r Z r 2= 变换为
多普勒雷达系统仿真
精品好文档,推荐学习交流 摘要 现代通信系统要求通信距离远、通信容量大、传输质量好,作为其关键技术之一的调制解调技术一直是人们研究的一个重要方向。本文以MATLAB为软件平台,充分利用其提供的通信工具箱和信号处理工具箱中的模块,对数字调制解调系统进行Simulink设计仿真,并且进行误差分析。 数字化正交数字化正交调制与解调是通信系统中十分重要的一个环节,针对不同的信道环境选择不同的数字化正交数字化正交调制与解调方式可以有效地提高通信系统中的频带利用率,改善接收信号的误码率。本设计运用Simulink仿真软件对二进制调制解调系统进行模型构建、系统设计、仿真演示、结果显示、误差分析以及综合性能分析,重点对BASK,BFSK,BPSK进行性能比较和误差分析。在实际应用中,视情况选择最佳的调制方式。 本文首先介绍了课题研究的背景,然后介绍系统设计所用的Simulink仿真软件,随后介绍了载波数字调制系统的原理,并根据原理构建仿真模型,进行数字调制系统仿真,最后对设计进行总结,并归纳了Simulink软件使用中需要注意的事项。本文的主要目的是对Simulink的学习和对数字调制解调理论的掌握和深化,为今后在通信领域继续学习和研究打下坚实的基础。 关键字:排通信系统,Simulink仿真,数字化调制解调,BASK,BFSK
精品好文档,推荐学习交流 ABSTRACT TheThe Modern communication systems require communication distance, large communication capacity, good transmission quality, as one of its key technologies modem technology has been an important direction for researchers. In this paper, MATLAB software platform, providing full use of its communications toolbox and signal processing toolbox module, digital modulation and demodulation system Simulink design simulation and error analysis. Modulation and demodulation is a very important part of the communication system, for different channel environment to select different modulation and demodulation system can effectively improve the spectrum efficiency in a communication system, improve the bit error rate of the received signal. This design using Simulink simulation software binary modulation and demodulation system modeling, system design, simulation demo showed that the error analysis and comprehensive performance analysis, focusing on the BASK, BFSK, BPSK performance comparison and error analysis. In practice, as the case may select the best modulation. This paper describes the background of the research, then describes the system design using Simulink simulation software, then introduced the carrier digital modulation system of principles, and build a simulation model based on the principle of digital modulation system simulation, and finally the design summary and induction Simulink software matters that need attention. The main purpose of this paper is to study and Simulink digital modem theory of mastery and deepening for the future to continue learning and research in the field of communication and lay a solid foundation. Key Words: queuing theory, demand management, telecom offices
汽笛声变调的启示--多普勒雷达原理 1842年一天,奥地利数学家多普勒路过铁路交叉处,恰逢一列火车从他身 旁驰过,他发现火车由远而近时汽笛声变响,音调变尖(注:应为“汽笛声的音频频率变高”);而火车由近而远时汽笛声变弱,音调变低(应为“汽笛声的音频频率降低了”)。他对这种现象感到极大兴趣,并进行了研究。发现这是由于振源与观察者之间存在着相对运动,使观察者听到的声音频率不同于振源频率的缘故,称为频移现象。因为这是多普勒首先提出来的,所以称为多普勒效应。 由于缺少实验设备,多普勒当时没有用实验进行验证。几年后有人请一队小号手在平板车上演奏,再请训练有素的音乐家用耳朵来辨别音调的变化,验证了该效应。 为了理解这一现象,需要考察火车以恒定速度驶近时,汽笛发出的声波在传播过程中表现出的是声波波长缩短,好像波被“压缩”了。因此,在一定时间间隔内传播的波数就增加了,这就是观察者为什么会感受到声调变高的原因;相反,当火车驶向远方时,声波的波长变大,好像波被“拉伸”了。因此,汽笛声听起来就显得低沉。 用科学语言来说,就是在一个物体发出一个信号时,当这个物体和接收者之间有相对运动时,虽然物体发出的信号频率固定不变,但接收者所接收到的信号频率相对于物体发出的信号频率出现了差异。多普勒效应也可以用波在介质中传播的衰减理论解释,波在介质中传播,会出现频散现象,随距离增加,高频向低频移动。 多普勒效应不仅适用于声波,它也适用于所有类型的波,包括电磁波。 多普勒效应被发现以后,直到1930年左右,才开始应用于电磁波领域中。常见的一种应用是医生检查就诊人用的“彩超”,就是利用了声波的多普勒效应。简单地说,“彩超”就是高清晰度的黑白B超再加上彩色多普勒。超声振荡器产生一种高频的等幅超声信号,向人体心血管器官发射,当超声波束遇到运动的脏器和血管时,便产生多普勒效应,反射信号为换能器所接受,根据反射波与发射波的频率差可以求出血流速度,根据反射波的频率是增大还是减小判定血流方向。 20世纪40年代中期,也就是多普勒发现这种现象之后大约100年,人们才将多普勒效应应用于雷达上。多普勒雷达就是利用多普勒效应进行定位,测速,测距等的雷达。当雷达发射一固定频率的脉冲波对空扫描时,如遇到活动目标,回波的频率与发射波的频率出现频率差(称为多普勒频率),根据多普勒频率的大小,可测出目标对雷达的径向相对运动速度;根据发射脉冲和接收的时间差,可以测出目标的距离。20世纪70年代以来,随着大规模集成电路和数字处理技术的发展,多普勒雷达广泛用于机载预警、导航、导弹制导、卫星跟踪、战场侦察、靶场测量、武器火控和气象探测等方面,成为重要的军事装备以及科学研究、业务应用装置。 多普勒天气雷达,是以多普勒效应为基础,当大气中云雨等目标物相对于雷达发射信号波有运动时,通过测定接收到的回波信号与发射信号之间的频率差异就能够解译出所需的信息。它与过去常规天气雷达仅仅接收云雨目标物对雷达发射电磁波的反射回波进了一大步。这种多普勒天气雷达的工作波长一般为5~10厘米,除了能起到常规天气雷达通过回波测定云雨目标物空间位置、强弱分布、垂直结构等作用,它的重大改进在于利用多普勒效应可以测定降水粒子的运
关于利用多普勒测车速的原理探究 摘要 本文从实例出发,阐述了雷达测速仪的工作原理───电磁波的多普勒效应,以及其实际应用上的一些情况. 关键词 电磁波的多普勒效应 The discovery of the principle of the velometer with Doppler effect Li Hongyang, Zhangyan Lin Weiping Tang Guangzhao , Li Zhuoran (A group from nuclear physics major, the physics department, scu) Abstract this article describes the application of Doppler effect of electromagnetic wave ,and the principle of the radar velometer. Keywords the Doppler effect of electromagnetic wave 背景 假定这种情景:一平直公路放置一测速仪,远方式来一辆车,其速度为v,测速仪发射一列电磁波,其频率为f,在极短时间后收到一频率为f ’的反射波.现在需要由f,f ’求v. 由于发出的为电磁波,经典运动理论下的多普勒公式已远远不够.再次我们避开四维坐标,用洛仑兹变换与狭义相对论来推导相对论下的多普勒效应. 令静止参考系为K 系,运动参考系为K ’系 则有 ①, ② 而由洛仑兹变换知: ③ ∴ ④ ⑤ 联立③④⑤得: ⑥ 2 2 2 01c u c m E -=2220'1'c u c m E -=????? ? ? ?? ??? -===-=γγ2''''c vt t t z z y y vt x x ?? ?????? ?? ??? ??-=-=-=221'1''c vu u u c vu u u vt u u x z z x y y x x γγγ2222''''z y x u u u u ++=2222z y x u u u u ++=22222 11'1c vu c u c u x --=-γ
1 多普勒天气雷达主要由几个部分构成?每个部分的主要功能是什么? 答:主要由雷达数据采集子系统(RDA ),雷达产品生成子系统(RPG ),主用户终端子系统(PUP )三部分构成。RDA 的主要功能是:产生和发射射频脉冲,接收目标物对这些脉冲的散射能量,并通过数字化形成基本数据。RPG 的主要功能是:由宽带通讯线路从RDA 接收数字化的基本数据,对其进行处理和生成各种产品,并将产品通过窄带通讯线路传给用户,是控制整个雷达系统的指令中心。PUP 的主要功能是:获取、存储和显示产品,预报员主要通过这一界面获取所需要的雷达产品,并将它们以适当的形式显示在监视器上。 2 多普勒天气雷达的应用领域主要有哪些? 答:一、对龙卷、冰雹、雷雨大风、暴洪等多种强对流天气进行监测和预警;二、利用单部或多部雷达实现对某个区域或者全国的降水监测;三、进行较大范围的降水定量估测;四、获取降水和降水云体的风场信息,得到垂直风廓线;五、改善高分辨率数值预报模式的初值场。 3 我国新一代天气雷达主要采用的体扫模式有哪些? 答:主要有以下三个体扫模式:VCP11——规定5分钟内对14个具体仰角的扫描,主要对强对流天气进行监测;VCP21——规定6分钟内对9个具体仰角的扫描,主要对降水天气进行监测;VCP31/VCP32——规定10分钟内对5个具体仰角的扫描(使用长脉冲),主要对无降水的天气进行监测。 4 天气雷达有哪些固有的局限性? 答:一、波束中心的高度随距离的增加而增加;二、波束宽度随距离的增加而展宽;三、静锥区的存在。 5 给出雷达气象方程的表达式,并解释其中各项的意义。 答: P t 为雷达发射功率(峰值功率); G 为天线增益;h 为脉冲长度; 、 :天线在水平方向和垂直方向的波束宽度; r 为降水目标到雷达的距离; :波长; m :复折射指数; Z 雷达反射率因子。 6 给出反射率因子在瑞利散射条件下的理论表达式,并说明其意义。 答:∑= 单位体积6i D z ,反射率因子指在单位体积内所有粒子的直径的六次方的总和,与波长无关。 7 给出后向散射截面的定义式及其物理意义。 答: 定义:设有一个理想的散射体,其截面面积为?,它能全部接收射到其 上的电磁波能量,并全部均匀的向四周散射,若该理想散射体返回雷达天线处的电磁波能流密度,恰好等于同距离上实际散射体返回雷达天线的电磁波能流密度,则该理想散射体的截面面积?就称为实际散射体的后向散射截面。 物理意义:定量表示粒子后向散射能力的强弱,后向散射截面越大,粒子的后向散射能力越强,在同等条件下,它所产生的回波信号也越强。 8 什么是天气雷达工作频率?什么是天气雷达脉冲重复频率? 答:工作频率——天气雷达发射的探测脉冲的震荡频率 脉冲重复频率——每秒产生的触发脉冲的数目 9 什么是波束的有效照射深度和有效照射体积? 答:有效照射深度——雷达发出的探测脉冲具有一定的持续时间τ,在空间的电磁波列就有一定的长度h=τc ,在雷Z R C Z m m r h G p p t r ?=?+-=2 2222223212ln 1024λθ?πθ?λi S s R S 24πσ=
浏览次数:110次悬赏分:0|解决时间:2011-8-24 19:30|提问者:匿名 最佳答案 从开过来的机车所听到的声波间的距离被压缩了,就好像一个人正在关手风琴。这个动作的结果产生一个明显的较高的音调。当火车离去时,声波传播开来,就出现了较低的声音--这种现象被称为“多普勒”效应。 检查机动车速度的雷达测速仪也是利用这种多普勒效应。从测速仪里射出一束射线,射到汽车上再返回测速仪。测速仪里面的微型信息处理机把返回的波长与原波长进行比较。返回波长越紧密,前进的汽车速度也越快--那就证明驾驶员超速驾驶的可能性也越大。 多普勒测速仪仪器介绍 TSI的LDV/PDPA系统 LDV/PDPA的主要装置和原理 激光多普勒测速仪是测量通过激光探头的示踪粒子的多普勒信号,再根据速度与多普勒频率的关系得到速度。由于是激光测量,对于流场没有干扰,测速范围宽,而且由于多普勒频率与速度是线性关系,和该点的温度,压力没有关系,是目前世界上速度测量精度最高的仪器。 LDV/PDPA测速工作原理可以用干涉条纹来说明。当聚焦透镜把两束入射光以?角会聚后,由干激光束良好的相干性,在会聚点上形成明暗相间的干涉条纹,条纹间隔正比干光波波长,而反比干半交角的正弦值。当流体中的粒子从条纹区的方向经过时,会依次散射出光强随时间变化的一列散射光波,称为多普勒信号。这列光波强度变化的频率称为多普勒频移。经过条纹区粒子的速度愈高,多普勒频移就愈高。将垂直于条纹方向上的粒子速度,除以条纹间隔,考虑到流体的折射率就能得到多普勒频移与流体速度之间线性关系。LDV/PDPA系统就是利用速度与多谱勒频移的线性关系来确定速度的。各个方向上的多普勒频率的相位差和粒子的直径成正比,利用监测到的相位差可以来确定粒径。 LDV/PDPA系统从功能上分为:光路部分、信号处理部分。光路部分:采用He-Ni激光器或Ar离子激光器,是因为它们能够提供高功率的514.5nm,488nm,476.5nm三种波长的激光。带有频移装置的分光器将激光分成等强度的两束,经过单模保偏光纤和光纤耦合器,将激光送到激光发射探头,调整激光在光腰部分聚焦在同一点,以保证最小的测量体积,这一点就是测量体即光学探头。接受探头将接受到的多普勒信号送到光电倍增管转化为电信号以及处理并发大,再至多普勒信号分析仪分析处理后至计算机记录,配套系统软件可以进行数据处理工作。在流场中存在适当示踪粒子的倩况下,可同时测出流动的三个方向速度及粒子直径。 TSI公司在国际上第一个生产商业化的LDV/PDPA系统,现在的TSI公司的LDV/PDPA系统已经拥有4项专利设计,并且在流场、湍流、传质、传热、流型、燃烧研究上有广泛的使
预报员试题/卫星与雷达; 极轨卫星:。轨道位置在空间几乎是固定的,高度800——1000千米,绕地球飞行,获取全球资料。 地球同步(或静止)卫星。位于地球赤道上空,高度36000千米左右,与地球自转速度相同,在赤道上空静止不动,因此,也称地球同步轨道卫星。 太阳耀斑:。 在可见光图像上,水面对太阳光的反射有可能使它具有云或浮尘的表现,这一现象称为太阳耀斑。 多普勒效应: 指波源相对于观察者运动时,观察者接收到的信号频率和波源发出的频率是不同的,而且发射频率和接收频率之间的差值和波源运动的速度有关。 下击暴流:能够产生近地面破坏性的水平辐散出流的风暴下部强下沉气流。 云线:带状云系的宽度小于一个纬距叫云线。 阵风锋:雷暴产生的冷空气外流边界的前沿。 雹暴云团以冰雹、大风天气为主的云团。 在云图中,“IR”“VIS”和“WV”分别代表:
C.红外图、可见光图、水汽图 红外云图的波长区间____。 B. 10.5至12.5um 可见光云图的波长区间____。 C. 0.4至1.1um 水汽云图的波长区间____。 A. 5.7至7.1um 红外云图的色调取决于物体________________。 B.表面温度的高低 白天在可见光图像上何处的云趋于更亮些: A.当面向太阳时; 可见光云图的色调取决于物体________________。 A.对太阳光的反照率的大小 水汽图的色调取决于物体________________。 C.水汽含量 一般来说,在( )上,云顶高度越高,则温度越低,云的色调越白。 A. 红外图 进行云识别时最主要因子包括: B.云识别时使用的图像种类; 暗影和高亮度在下面那种情况可观测到? B.可见光图像上
我国河流湖泊众多,水网密布,而要测量水流的流速,记录水文数据资料,就需要用到测速仪。雷达测速仪就是众多测速仪中的一种,雷达测流运用的原理是多普勒效应。多普勒效应是为纪念奥地利物理学家克里斯琴约翰.多普勒而命名的。在声学领域中,当声源与接收体(即探头和反射体)之间有相对运动时,回声的频率将有所变化,此种频率的变化称之为频移,即多普勒效应。如下图所示,当雷达流速仪与水体以相对速度V发生对运动时,雷达流速仪所收到的电磁波频率与雷达自身所发出的电磁波频率有所不同, 此频率差称为多普勒频移。通过解析频移与V的关系,得到流体表面流速。 雷达测速仪被广泛应用在河道、灌渠、防汛等水文测量;江河、水资源监测;环保排污、地下水道管网监测;城市防洪、山区暴雨性洪水监测;地质灾害预警监测等诸多领域。 今天我们主要来看看雷达测速仪的特点,主要有如下几个特点: 1、非接触、安全低损、少维护、不受泥沙影响; 2、能胜任洪水期高流速条件下的测量; 3、具有防反接、防雷保护功能; 4、系统功耗低,一般太阳能供电即可满足测流需要; 5、多种接口方式,既有数字接口又具有模拟接口,方便接入系统; 6、无线传输功能(可选),可将数据无线传输到3.5km以外;
7、测速范围宽,测量距离远达40m; 8、多种触发模式:周期、触发、查询、自动; 9、安装特别简单,土建量很少; 10、全防水设计,适合野外使用。 非接触雷达测流方式测速时设备不受污水腐蚀,不受泥沙影响,少受水毁影响,土建简单,便于维护,保障人员安全,特殊的天线设计使得功耗超低,大大降低了供电需求。不仅可用于平时流速监测,而且特别适合承担急难险重观测任务。 航征科技是目前国内具有自主知识产权的雷达方案提供商, 拥有多项专利和软件著作权。航征面向水文、水利、环境保护、城市排水管网等行业用户, 提供雷达流速流量在线监测解决方案。航征分别在上海、无锡建立了运营和研发测试中心,拥有完整的技术研发体系和阵容强大的科研队伍,与清华大学、国防科技大学、上海交通大学等知名院校达成长期战略合作,有多位业内专家作为公司的技术后盾,立志成为全球优秀的智能传感解决方案提供商。
脉冲多普勒雷达的总结 1、适用范围 脉冲多普勒(PD)雷达是在动目标显示雷达基础上发展起来的一种新型雷达体制。这种雷达具有脉冲雷达的距离分辨力和连续波雷达的速度分辨力,有更强的抑制杂波的能力,因而能在较强的杂波背景中分辨出动目标回波。 2、PD雷达的定义及其特征 (1)定义:PD雷达是一种利用多普勒效应检测目标信息的脉冲雷达。 (2)特征:①具有足够高的脉冲重复频率(简称PRF),以致不论杂波或所观测到的目标都没有速度模糊。 ②能实现对脉冲串频谱单根谱线的多普勒滤波,即频域滤波。 ③PRF很高,通常对所观测的目标产生距离模糊。 3、PD雷达的分类 图1 PD雷达的分类图 ①MTI雷达(低PRF):测距清晰,测速模糊 ②PD雷达(中PRF):测距模糊,测速模糊,是机载雷达的最佳波形选择 ③PD雷达(高PRF):测距模糊,测速清晰 4、机载下视PD雷达的杂波谱分析 机载下视PD雷达的地面杂波是由主瓣杂波、旁瓣杂波和高度线杂波所组成的。 、PRF 的选择 (1)高、中、低脉冲重复频率的选择 ①机载雷达在没有地杂波背景干扰的仰视情况下,通常采用低PRF加脉冲压缩。 ②迎面攻击时高PRF优于中PRF。尾随时,在低空,中PRF优于高PRF ;在高空,高PRF优于中PRF。 ③交替使用中、高PRF的方法,或者再加上在下视时采用低PRF的方法,并在低、中PRF时配合采用脉冲压缩技术,将是在所有工作条件下得到远距离探测性能的最有效的方
法。 (2)高PRF时重复频率的选择 ①使迎面目标谱线不落人旁瓣杂波区中: ②为了识别迎面和离去的目标: A、当接收机单边带滤波器对主瓣杂波频率固定时: B、当接收机单边带滤波器相对发射频率是固定时: 注:单边带滤波器的通带范围应从,单边带滤波器的中心频率是固定的,但偏离应为。 6、PD雷达的信号处理系统 PD雷达的信号处理系统主要由单边带滤波器、主瓣杂波抑制滤波器、零多普勒频率抑制滤波器、多普勒滤波器组、检波积累、转换器和门限等部分组成,下面总结各组成部分的特点及其实现方法。 (1)单边带滤波器 特点:带宽近似等于脉冲重复频率fr, 一般设置在中频; 从回波频谱中只滤出单根谱线; 避免了后面信号处理过程中可能产生的频谱折叠效应; 距离选通波门必须设在单边带滤波器之前; 要求带外抑制至少要大于60dB; 实现方法:采用石英晶体滤波器 (2)主瓣杂波抑制滤波器 特点:比目标回波能量要高出60-80dB; 主瓣杂波抑制滤波器的幅一频特性应是主瓣杂波频谱包络的倒数; 相当于一个白化滤波器,经过主瓣杂波抑制之后,后面的多普勒滤波器可以 按照白噪声中的匹配滤波理论来进行设计; 实现方法:首先确定它的频率,用一个混频器先消除变化的,就可以用一个固定频率的滤波器将其滤除. 确定主瓣杂波中心频率有两种方法:一种方法是利用频率跟踪; 另一种是由天线指向和载机飞行速度计算出主瓣杂波应有的多普勒频移,直接控制压 控振荡器去产生的振荡濒率。 (3)零多普勒频率抑制滤波器 特点:用于高度杂波的滤除; 同时抑制发射机直接进人到接收机的泄漏; 实现方法:①只需断开滤波器组中落人高度杂波区的那些子滤波器的输出; ②使用可防止检测高度线杂波专用的CFAR电路; ③使用航迹消隐器除去最后输出的高度线杂波。 (4)多普勒滤波器组 特点:是覆盖预期的目标多普勒频移范围的一组邻接的窄带滤波器; 起到了实现速度分辨和精确测量的作用; 可以设在中频,也可以设在视频;
多普勒天气雷达原理与业务应用测验一 (一至四章) 一、填空题 1、天气雷达是探测降水系统的主要手段,是对强对流天气(冰雹、大风、龙卷和暴洪)进行监测和预警的主要工具之一。 2、RDA由四个部分构成:发射机、天线、接收机和信号处理器。 3、PUP可以通过以下三种方式获取产品:(1)常规产品列表;(2)一次性请求;(3)产品-预警配对。 4、S波段和C波段的雷达波在传播过程中主要受到降水的衰减,衰减是由降水离子对于雷达雷达波的散射和吸收造成的。 5、.新一代多普勒雷达估测累计降水分布时,雷达采样时间间隔一般不应超过10分钟,除受本身精度限制外,还受降水类型(Z-R关系)、雷达探测高度、地面降水差异和风等多种因素影响。 6、多普勒雷达能测量的一个脉冲到下一个脉冲的最大相移上限是180度,其对应的径向速度值称为最大不模糊速度。 7、径向速度图中,零等速线呈“S”型表示,实际风随高度顺时针旋转,由RDA处得南风转为现实区边缘对应的西风。反之,零等速线呈反“S”型表示,实际风随高度。逆时针旋转,由RDA处得南风转为现实区边缘对应的东风。 8、WSR-88D和我国新一代天气雷达的脉冲重复频率在300-1300范
围内。 9、多普勒天气雷达的最大不模糊距离与雷达的脉冲重复频率成反比,相应的最大不模糊速度与脉冲重复频率成正比。 10、对于SA和SB型雷达,基数据中反射率因子的分辨率为1K M×1°,而径向速度和谱宽的分辨率为0.25K M×1°。 11、积状云降水一般有比较密实的结构,反射率因子空间梯度较大,其强度中心的反射率因子通常在35dbz以上,而层状云降水回波比较均匀,反射率因子空间梯度较小,反射率因子一般大于15dbz而小于30dbz。 12、雷达波束和实际风向的夹角越大,则径向速度值越小;实际风速越小,径向速度也越小。 13、如果一个模糊的径向速度值是 45 节,它的邻近值是-55 节,最大不模糊径向速度是 60节,那么这个径向速度的最可能值是节(-75)14、我国的新一代天气雷达主要采用(VCP11、VCP21、VCP31)三种体扫模式。 15、雷达产品生成子系统有主要功能有:(产品生成);(产品分发);雷达控制台;(第三级数据存档)。 16、主用户处理器PUP是的主要功能有:(产品请求);(产品数据存档);产品显示;(产品编辑注释);状态监视。 17、在瑞利散射条件满足的情况下,降水粒子集合的反射率因子只与降水粒子本身的(尺寸)和(数密度)有关。 18、(距离折叠)是雷达对产生雷达回波的目标物位置的一种辨认错误。
DSP 实验课大作业设计 一 实验目的 在DSP 上实现线性调频信号的脉冲压缩、动目标显示(MTI )和动目标检测(MTD),并将结果与MATLAB 上的结果进行误差仿真。 二 实验内容 2.1 MATLAB 仿真 设定带宽、脉宽、采样率、脉冲重复频率,用MATLAB 产生16个脉冲的LFM ,每个脉冲有4个目标(静止,低速,高速),依次做 2.1.1 脉压 2.1.2 相邻2脉冲做MTI ,产生15个脉冲 2.1.3 16个脉冲到齐后,做MTD ,输出16个多普勒通道 2.2 DSP 实现 将MATLAB 产生的信号,在visual dsp 中做脉压,MTI 、MTD ,并将结果与MATLAB 作比较。 三 实验原理 3.1 脉冲压缩原理及线性调频信号 雷达中的显著矛盾是:雷达作用距离和距离分辨率之间的矛盾以及距离分辨率和速度分辨率之间的矛盾。雷达的距离分辨率取决于信号带宽。在普通脉冲雷达中,雷达信号的时宽带宽积为一常量(约为1),因此不能兼顾距离分辨率和速度分辨力两项指标。脉冲压缩(PC )采用宽脉冲发射以提高发射的平均功率,保证足够的最大作用距离,而在接收时则采用相应的脉冲压缩法获得窄脉冲,以提高距离分辨率,因而能较好地解决作用距离和分辨能力之间的矛盾。 一个理想的脉冲压缩系统,应该是一个匹配滤波系统。它要求发射信号具有非线性的相位谱,并使其包络接近矩形;要求压缩网络的频率特性(包括幅频特性和相频特性)与发射脉冲信号频谱(包括幅度谱和相位谱)实现完全的匹配。 脉冲压缩按信号的调制规律(调频或调相)分类,可分为以下四种: (1)线性调频脉冲压缩 (2)非线性调频脉冲压缩 (3)相位编码脉冲压缩 (4)时间频率编码脉冲压缩 本实验采用的是线性调频脉冲压缩。 线性调频信号是指频率随时间的变化而线性改变的信号。线性调频可以同时保留连续信号和脉冲的特性,并且可以获得较大的压缩比,有着良好的距离分辨率和径向速度分辨率,所以将线性调频信号作为雷达系统中一种常用的脉冲压缩信号。 接收机输入端的回波信号是经过调制的宽脉冲,所以在接收机中应该设置一个与发射信号频率匹配的滤波器,使回波信号变成窄脉冲,同时实现了宽脉冲的能量和窄脉冲的分辨能力。解决了雷达发射能量及分辨率之间的矛盾。 匹配滤波器是指输出信噪比最大准则下的最佳线性滤波器。根据匹配理论, 匹配滤波器的传输特性: 0)()(*t j e KS H ωωω-=
多普勒天气雷达集训考试题答案 一、 填空题(共30题,每空0.5分,总分40分) 1、新一代天气雷达主要由 雷达数据采集系统 RDA 、 雷达产品生成系统RPG 、 主用户终端子系统PUP 三部分组成。 2、多普勒天气雷达测量的三种基数据是基本反射率因子 、平均径向速度、谱宽 。 3、大气中折射的种类有 标准大气折射 、超折射 、 负折射 、 无折射 、 临界折射 。 4、雷达探测到的任意目标的空间位置可根据 仰角、方位角、斜距三个基本要素求得。 5、多普勒雷达除了具有探测云和降水的 位置 和 强度 的功能以外,它以 多普勒效应 为基础,根据返回信号的 频率 漂移,还可以获得目标物相对于雷达运动的径向速度 。 6、达气象方程为=t p ∑单位体积i r h PtG σπθ?λ2 222)2(ln 1024,其中G 表示天线增益 ,h 表示脉冲长度 ,σ表 示粒子的后向散射截面 。 7、反射率因子定义为单位体积中所有粒子直径的6次方之和。它的大小反映了气象目标内部降水粒子的 尺度 和 数密度 ,常用来表示气象目标的强度。 8、触发对流的抬升条件大多由中尺度系统提供,如锋面、干线、对流风暴的外流边界(阵风锋)、海(陆)风锋、重力波等, 9、雷达波束在降水中传播时能量的衰减是由降水粒子对雷达电磁波的散射 和 吸收 造成的。 10、当发生距离折叠时,雷达所显示的回波位置的 方位(或位置) 是正确的,但 距离 是错误的。 11、在雷达径向速度图上,暖平流时零值等风速线呈S 型,冷平流时呈 反S 型。 12、新一代雷达速度埸中,辐合或 辐散 在径向风场图像中表现为一个最大和最小的径向速度对,两个极值中心连线和雷达射线 一致 。 13、多普勒天气雷达与常规天气雷达的主要区别在于前者可以测量目标物沿雷达径向的速度 当目标物位于最大不模糊距离以外时,雷达错误地把它当作同一方向的最大不模糊距离以内的某个位置,称之为 距离折叠 。37 14、当45~55dBZ 的回波强度达到 -20 度层的高度时,最有可能产生冰雹。 15、降水回波的反射率因子一般在 15dBZ 以上。层状云降水回波的强度很少超过
任务书 雷达进行PD测速主要是利用了目标回波中携带的多普勒信息,在频域实现目标和杂波的分离,它可以把位于特定距离上、具有特定多普勒频移的目标回波检测出来,而把其他的杂波和干扰滤除。因此要求雷达必须具备很强的抑制杂波的能力,能在较强的杂波背景中分辨出运动目标的回波。 如今,不管是在军用还是民用上,雷达都在发挥着它很早重要的作用,与早期雷达采用距离微分方法测速相比,基于脉冲多普勒理论的雷达测速技术具有实时性好、精度高等优点。特别是现代相控阵技术在雷达领域的应用,实现了波束的无惯性扫描和工作方式的快速切换,更便于应用脉冲多普勒技术进行雷达测速。 本篇课程设计目的在于介绍脉冲多普勒雷达测速的原理,并对这种技术进行介绍和仿真。
摘要 脉冲多普勒(PD)雷达以其卓越的杂波抑制性能受到世人瞩目。现代飞行器性能的改进和导航手段的加强,使其能在低空和超低空飞行,因此防御低空入侵己成重要问题,由此要求机载雷达,包括预警机雷达和机载火控雷达具有下视能力,即要求能在强的地杂波背景中发现微弱的目标信号,所以现代的预警机雷达和机载火控雷达皆采用PD体制。脉冲多普勒雷达包含了连续波雷达和脉冲雷达两方面的优点,它具有较高的速度分辨能力,从而可以更有效地解决抑制极强的地杂波干扰问题;此外,脉冲多普勒雷达能够同时敏感地测定距离和速度信息;能够利用多普勒处理技术实现高分辨率的合成孔径图像;而且亦具有良好的抗消极干扰能力和抗积极干扰能力。 本文介绍了脉冲多普勒雷达测速的原理,信号处理。并用matlab简单的仿真了雷达系统对信号的处理. 关键词:脉冲多普勒雷达恒虚警脉冲压缩线性调频 Abstact Pulse Doppler (PD) radar is famous for it`s outsdanding clutter suppression.Modern aircraft`s function and GPS has been strengthen.now.it makes the aircraft can fly lower and lower.So.nowadays,Defensing.Low altitude invasion has been an important problem.so we require airborne radar. Early warning radar and airborne fire control radar have the ability to look down.That is to say.The radar is be required the ability to find Weak target signal in the strong Groung clutter.So .The modern airborne early warning radar and airborne fire control radar use the PD system.Pulse Doppler (PD) radar concludes two adervantages of Continuous wave radar and impulse radar.It has a higher velocity resolution.thus it can effectively.soveing the problem of strong ground clutter.what`s more.Pulse Dppler (PD) radar can Sensitive text the Distance and speed on the same time.Itcan use Doppler processing technology to realise Synthetic aperture images with high resolution. This article sinply introduced principle of pulse Doppler radar and signal