linux ALSA 声卡驱动之Asoc架构中的Platform
- 格式:doc
- 大小:657.04 KB
- 文档页数:8
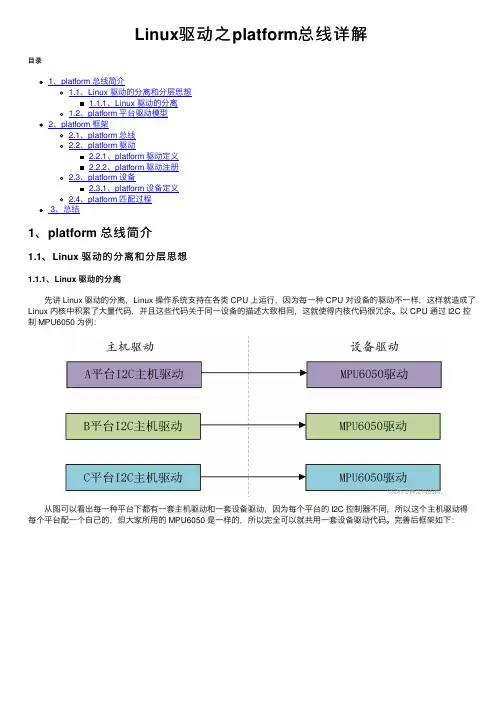
Linux驱动之platform总线详解⽬录1、platform 总线简介1.1、Linux 驱动的分离和分层思想1.1.1、Linux 驱动的分离1.2、platform 平台驱动模型2、platform 框架2.1、platform 总线2.2、platform 驱动2.2.1、platform 驱动定义2.2.2、platform 驱动注册2.3、platform 设备2.3.1、platform 设备定义2.4、platform 匹配过程3、总结1、platform 总线简介1.1、Linux 驱动的分离和分层思想1.1.1、Linux 驱动的分离先讲 Linux 驱动的分离,Linux 操作系统⽀持在各类 CPU 上运⾏,因为每⼀种 CPU 对设备的驱动不⼀样,这样就造成了Linux 内核中积累了⼤量代码,并且这些代码关于同⼀设备的描述⼤致相同,这就使得内核代码很冗余。
以 CPU 通过 I2C 控制 MPU6050 为例:从图可以看出每⼀种平台下都有⼀套主机驱动和⼀套设备驱动,因为每个平台的 I2C 控制器不同,所以这个主机驱动得每个平台配⼀个⾃⼰的,但⼤家所⽤的 MPU6050 是⼀样的,所以完全可以就共⽤⼀套设备驱动代码。
完善后框架如下:当然,这只是对于 I2C 下的 MPU6050 这个设备,实际情况下,I2C 下肯定会挂载很多设备,根据这个思路,我们可以得到框架为:⽽在实际开发中,I2C 主机驱动半导体⼚家会编写好,设备驱动也由设备⼚家编写好,我们只需要提供设备信息即可,如设备接到那个 I2C 接⼝上,I2C 速度为多少。
这样就相当于把设备信息从设备驱动中剥离出来,⽽设备驱动也会⽤标准⽅法去获取设备信息(如从设备树中获取设备信息)。
这样就相当于驱动只负责驱动,设备(信息)只负责设备,想办法将两者进⾏匹配即可,来做这个匹配⼯作的就是总线,这就构成了 Linux 中的总线-驱动-设备模型。
DAPM是Dynamic Audio Power Management的缩写,直译过来就是动态音频电源管理的意思,DAPM是为了使基于linux的移动设备上的音频子系统,在任何时候都工作在最小功耗状态下。
DAPM对用户空间的应用程序来说是透明的,所有与电源相关的开关都在ASoc core中完成。
用户空间的应用程序无需对代码做出修改,也无需重新编译,DAPM根据当前激活的音频流(playback/capture)和声卡中的mixer等的配置来决定那些音频控件的电源开关被打开或关闭。
/******************************************************************************************* **********/声明:本博内容均由/droidphone原创,转载请注明出处,谢谢!/******************************************************************************************* **********/DAPM控件是由普通的soc音频控件演变而来的,所以本章的内容我们先从普通的soc音频控件开始。
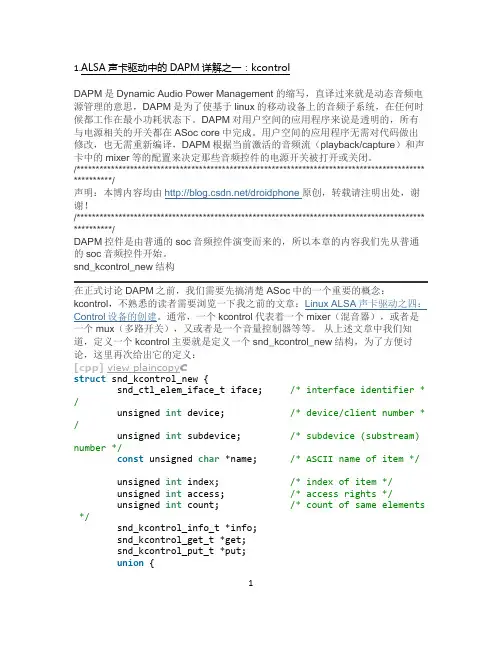
snd_kcontrol_new结构在正式讨论DAPM之前,我们需要先搞清楚ASoc中的一个重要的概念:kcontrol,不熟悉的读者需要浏览一下我之前的文章:Linux ALSA声卡驱动之四:Control设备的创建。
通常,一个kcontrol代表着一个mixer(混音器),或者是一个mux(多路开关),又或者是一个音量控制器等等。
从上述文章中我们知道,定义一个kcontrol主要就是定义一个snd_kcontrol_new 结构,为了方便讨论,这里再次给出它的定义:[cpp]view plaincopystruct snd_kcontrol_new {snd_ctl_elem_iface_t iface; /* interface identifier * /unsigned int device; /* device/client number * /unsigned int subdevice; /* subdevice (substream) number */const unsigned char *name; /* ASCII name of item */ unsigned int index; /* index of item */unsigned int access; /* access rights */unsigned int count; /* count of same elements */snd_kcontrol_info_t *info;snd_kcontrol_get_t *get;snd_kcontrol_put_t *put;union {1snd_kcontrol_tlv_rw_t *c;const unsigned int *p;} tlv;unsigned long private_value;};回到Linux ALSA声卡驱动之四:Control设备的创建中,我们知道,对于每个控件,我们需要定义一个和他对应的snd_kcontrol_new结构,这些snd_kcontrol_new结构会在声卡的初始化阶段,通过snd_soc_add_codec_controls函数注册到系统中,用户空间就可以通过amixer或alsamixer等工具查看和设定这些控件的状态。
LinuxALSA声卡驱动之⼋:ASoC架构中的Platform#define SND_SOC_DAIFMT_AC97 6 /* AC97 */#define SND_SOC_DAIFMT_PDM 7 /* Pulse density modulation */ bit 4-7 ⽤于设置接⼝时钟的开关特性:1. #def ine SND_SOC_DAIFMT_CONT (1 << 4) /* cont inuous clock */2. #def ine SND_SOC_DAIFMT_GAT ED (2 << 4) /* clock is gat ed */bit 8-11 ⽤于设置接⼝时钟的相位1. #def ine SND_SOC_DAIFMT_NB_NF (1 << 8) /* normal bit clock + f rame */2. #def ine SND_SOC_DAIFMT_NB_IF (2 << 8) /* normal BCLK + inv FRM */3. #def ine SND_SOC_DAIFMT_IB_NF (3 << 8) /* invert BCLK + nor FRM */4. #def ine SND_SOC_DAIFMT_IB_IF (4 << 8) /* invert BCLK + FRM */bit 12-15 ⽤于设置接⼝主从格式:1. #def ine SND_SOC_DAIFMT_CBM_CFM (1 << 12) /* codec clk & FRM mast er */2. #def ine SND_SOC_DAIFMT_CBS_CFM (2 << 12) /* codec clk slave & FRM mast er */3. #def ine SND_SOC_DAIFMT_CBM_CFS (3 << 12) /* codec clk mast er & f rame slave */4. #def ine SND_SOC_DAIFMT_CBS_CFS (4 << 12) /* codec clk & FRM slave */5. snd_soc_platform_driver中的ops字段该ops字段是⼀个snd_pcm_ops结构,实现该结构中的各个回调函数是socplat f orm驱动的主要⼯作,他们基本都涉及dma操作以及dma buf f er的管理等⼯作。
Linux设备驱动模型之platform总线深入浅出在Linux2.6以后的设备驱动模型中,需关心总线,设备和驱动这三种实体,总线将设备和驱动绑定。
在系统每注册一个设备的时候,会寻找与之匹配的驱动;相反,在系统每注册一个驱动的时候,会寻找与之匹配的设备,而匹配由总线完成。
对于依附在USB、PCI、I2C、SPI等物理总线来这些都不是问题。
但是在嵌入式系统里面,在Soc系统中集成的独立外设控制器,挂接在Soc内存空间的外设等却不依附在此类总线。
基于这一背景,Linux发明了一种总线,称为platform。
相对于USB、PCI、I2C、SPI等物理总线来说,platform总线是一种虚拟、抽象出来的总线,实际中并不存在这样的总线。
platform总线相关代码:driver\base\platform.c 文件相关结构体定义:include\linux\platform_device.h 文件中platform总线管理下最重要的两个结构体是platform_device和platform_driver 分别表示设备和驱动在Linux中的定义如下一:platform_driver//include\linux\platform_device.h struct platform_driver { int (*probe)(struct platform_device *); //探测函数,在注册平台设备时被调用int (*remove)(struct platform_device *); //删除函数,在注销平台设备时被调用void (*shutdown)(struct platform_device *); int (*suspend)(struct platform_device *, pm_message_t state); //挂起函数,在关机被调用int (*suspend_late)(struct platform_device *, pm_message_t state); int (*resume_early)(struct platform_device *); int (*resume)(struct platform_device *);//恢复函数,在开机时被调用struct device_driver driver;//设备驱动结构};12345678。

目前,linux系统常用的音频驱动有两种形式:alsa ossalsa:现在是linux下音频驱动的主要形式,与简单的oss兼容。
oss:过去的形式而我们板子上的uda1341用的就是alsa驱动。
alsa概述:因为我们用的是板上系统,用的也是alsa 的一个soc子系统。
所以我们直接讲解alsa soc子系统。
ALSA SoC LayerALSA板上系统层==============The overall project goal of the ALSA System on Chip (ASoC) layer is toprovide better ALSA support for embedded system-on-chip processors (e.g.pxa2xx, au1x00, iMX, etc) and portable audio codecs. Prior to the ASoCsubsystem there was some support in the kernel for SoC audio, however ithad some limitations:-ALSA板上系统(ASoC)层的总体项目目标,是为对SOC嵌入式处理器和便携音频解码器提供更好的ALSA支持。
在ASoC子系统之前,己有对内核的SoC 音频支持,但是那些支持存在一些局限:Codec drivers were often tightly coupled to the underlying SoCCPU. This is not ideal and leads to code duplication - for example,Linux had different wm8731 drivers for 4 different SoC platforms.解码器常常与底层嵌入式处理器一对一紧密结合。
这是非理想化的,因为这将导致代码的重复-例如,对四个不同的嵌入式平台,Linux要有不同的wm8731驱动。
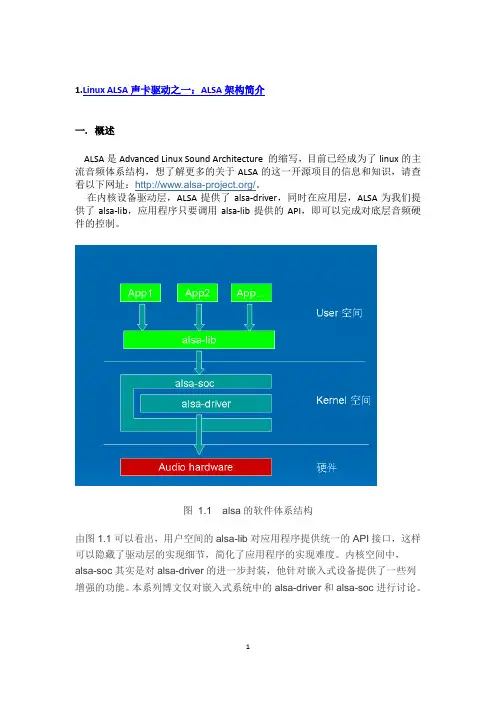
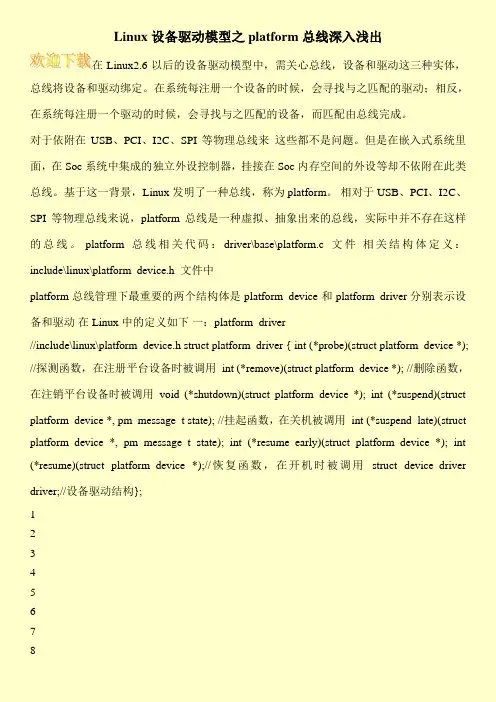
1.Linux ALSA声卡驱动之一:ALSA架构简介一. 概述ALSA是Advanced Linux Sound Architecture 的缩写,目前已经成为了linux的主流音频体系结构,想了解更多的关于ALSA的这一开源项目的信息和知识,请查看以下网址:/。
在内核设备驱动层,ALSA提供了alsa-driver,同时在应用层,ALSA为我们提供了alsa-lib,应用程序只要调用alsa-lib提供的API,即可以完成对底层音频硬件的控制。
图 1.1 alsa的软件体系结构由图1.1可以看出,用户空间的alsa-lib对应用程序提供统一的API接口,这样可以隐藏了驱动层的实现细节,简化了应用程序的实现难度。
内核空间中,alsa-soc其实是对alsa-driver的进一步封装,他针对嵌入式设备提供了一些列增强的功能。
本系列博文仅对嵌入式系统中的alsa-driver和alsa-soc进行讨论。
二. ALSA设备文件结构我们从alsa在linux中的设备文件结构开始我们的alsa之旅. 看看我的电脑中的alsa驱动的设备文件结构:$ cd /dev/snd$ ls -lcrw-rw----+ 1 root audio 116, 8 2011-02-23 21:38 controlC0crw-rw----+ 1 root audio 116, 4 2011-02-23 21:38 midiC0D0crw-rw----+ 1 root audio 116, 7 2011-02-23 21:39 pcmC0D0ccrw-rw----+ 1 root audio 116, 6 2011-02-23 21:56 pcmC0D0pcrw-rw----+ 1 root audio 116, 7 2011-02-23 21:39 pcmC0D1ccrw-rw----+ 1 root audio 116, 5 2011-02-23 21:38 pcmC0D1pcrw-rw----+ 1 root audio 116, 3 2011-02-23 21:38 seqcrw-rw----+ 1 root audio 116, 2 2011-02-23 21:38 timer$我们可以看到以下设备文件:∙controlC0 --> 用于声卡的控制,例如通道选择,混音,麦克风的控制等∙midiC0D0 --> 用于播放midi音频∙pcmC0D0c --〉用于录音的pcm设备∙pcmC0D0p --〉用于播放的pcm设备∙seq --〉音序器∙timer --〉定时器其中,C0D0代表的是声卡0中的设备0,pcmC0D0c最后一个c代表capture,pcmC0D0p最后一个p代表playback,这些都是alsa-driver中的命名规则。

linuxALSA声卡驱动之Asoc架构中的Codec1. Codec简介在移动设备中,Codec的作⽤可以归结为4种,分别是:.对PCM等信号进⾏D/A转换,把数字的⾳频信号转换为模拟信号.对Mic、Linein或者其他输⼊源的模拟信号进⾏A/D转换,把模拟的声⾳信号转变CPU能够处理的数字信号.对⾳频通路进⾏控制,⽐如播放⾳乐,收听调频收⾳机,⼜或者接听电话时,⾳频信号在codec内的流通路线是不⼀样的.对⾳频信号做出相应的处理,例如⾳量控制,功率放⼤,EQ控制等等ASoC对Codec的这些功能都定义好了⼀些列相应的接⼝,以⽅便地对Codec进⾏控制。
ASoC对Codec驱动的⼀个基本要求是:驱动程序的代码必须要做到平台⽆关性,以⽅便同⼀个Codec的代码不经修改即可⽤在不同的平台上。
以下的讨论基于wolfson的Codec芯⽚WM8994,2.ASoc中对Codec的数据抽象描述Codec的最主要的⼏个数据结构分别是:snd_soc_codec、snd_soc_codec_driver、snd_soc_dai、snd_soc_dai_driver、其中snd_soc_dai 和snd_soc_dai_driver在ASoc的Platform驱动中也会使⽤到,Platform和Codec的DAI 通过snd_soc_dai_link结构,在Machine驱动中进⾏绑定连接。
下⾯我们⼏个结构体的定义。
Snd_soc_codecSnd_soc_codec_driverSnd_soc_daiSnd_soc_dai_driverSnd_soc_dai_ops⽤于实现该dai的控制盒参数配置3 Codec的注册因为Codec驱动的代码要做到平台⽆关性,要使得Machine驱动能够使⽤该Codec。
Codec驱动的⾸要任务就是确定snd_soc_codec和snd_soc_dai的实例,并把他们注册到系统中,注册的codec和dai才能为Machine驱动所⽤。
Linux设备驱动之platform
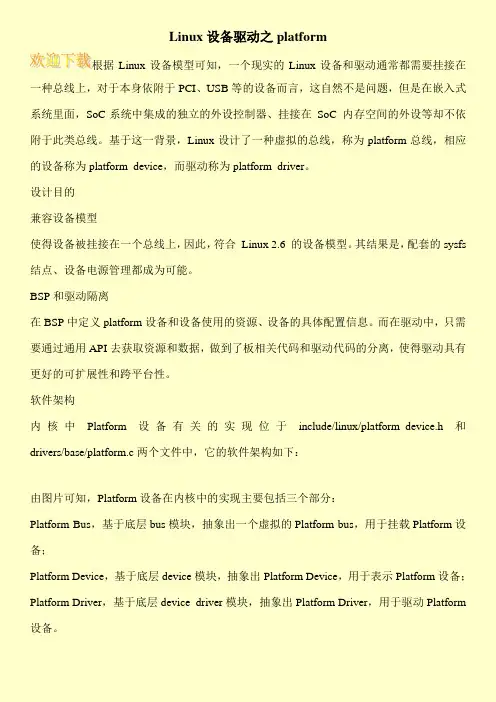
根据Linux设备模型可知,一个现实的Linux设备和驱动通常都需要挂接在一种总线上,对于本身依附于PCI、USB等的设备而言,这自然不是问题,但是在嵌入式系统里面,SoC系统中集成的独立的外设控制器、挂接在SoC 内存空间的外设等却不依附于此类总线。
基于这一背景,Linux设计了一种虚拟的总线,称为platform总线,相应的设备称为platform_device,而驱动称为platform_driver。
设计目的
兼容设备模型
使得设备被挂接在一个总线上,因此,符合Linux 2.6 的设备模型。
其结果是,配套的sysfs 结点、设备电源管理都成为可能。
BSP和驱动隔离
在BSP中定义platform设备和设备使用的资源、设备的具体配置信息。
而在驱动中,只需要通过通用API去获取资源和数据,做到了板相关代码和驱动代码的分离,使得驱动具有更好的可扩展性和跨平台性。
软件架构
内核中Platform设备有关的实现位于include/linux/platform_device.h和drivers/base/platform.c两个文件中,它的软件架构如下:
由图片可知,Platform设备在内核中的实现主要包括三个部分:
Platform Bus,基于底层bus模块,抽象出一个虚拟的Platform bus,用于挂载Platform设备;
Platform Device,基于底层device模块,抽象出Platform Device,用于表示Platform设备;Platform Driver,基于底层device_driver模块,抽象出Platform Driver,用于驱动Platform 设备。
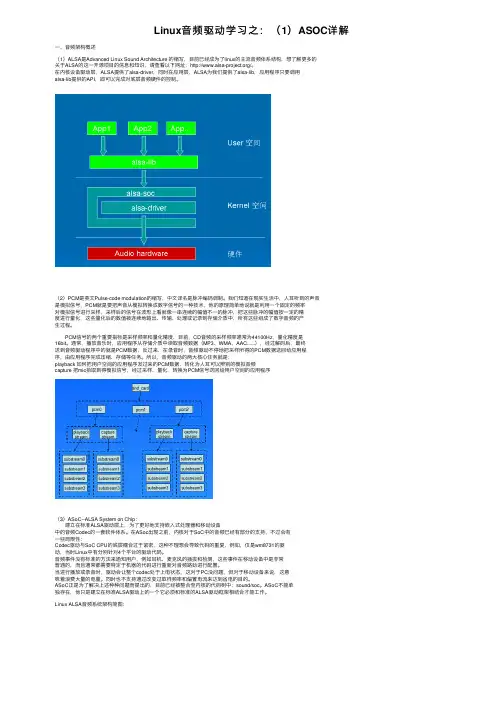
Linux⾳频驱动学习之:(1)ASOC详解⼀、⾳频架构概述(1)ALSA是Advanced Linux Sound Architecture 的缩写,⽬前已经成为了linux的主流⾳频体系结构,想了解更多的关于ALSA的这⼀开源项⽬的信息和知识,请查看以下⽹址:/。
在内核设备驱动层,ALSA提供了alsa-driver,同时在应⽤层,ALSA为我们提供了alsa-lib,应⽤程序只要调⽤alsa-lib提供的API,即可以完成对底层⾳频硬件的控制。
(2)PCM是英⽂Pulse-code modulation的缩写,中⽂译名是脉冲编码调制。
我们知道在现实⽣活中,⼈⽿听到的声⾳是模拟信号,PCM就是要把声⾳从模拟转换成数字信号的⼀种技术,他的原理简单地说就是利⽤⼀个固定的频率对模拟信号进⾏采样,采样后的信号在波形上看就像⼀串连续的幅值不⼀的脉冲,把这些脉冲的幅值按⼀定的精度进⾏量化,这些量化后的数值被连续地输出、传输、处理或记录到存储介质中,所有这些组成了数字⾳频的产⽣过程。
PCM信号的两个重要指标是采样频率和量化精度,⽬前,CD⾳频的采样频率通常为44100Hz,量化精度是16bit。
通常,播放⾳乐时,应⽤程序从存储介质中读取⾳频数据(MP3、WMA、AAC......),经过解码后,最终送到⾳频驱动程序中的就是PCM数据,反过来,在录⾳时,⾳频驱动不停地把采样所得的PCM数据送回给应⽤程序,由应⽤程序完成压缩、存储等任务。
所以,⾳频驱动的两⼤核⼼任务就是:playback 如何把⽤户空间的应⽤程序发过来的PCM数据,转化为⼈⽿可以辨别的模拟⾳频capture 把mic拾取到得模拟信号,经过采样、量化,转换为PCM信号送回给⽤户空间的应⽤程序(3)ASoC--ALSA System on Chip: 建⽴在标准ALSA驱动层上,为了更好地⽀持嵌⼊式处理器和移动设备中的⾳频Codec的⼀套软件体系。
DAPM是Dynamic Audio Power Management的缩写,直译过来就是动态音频电源管理的意思,DAPM是为了使基于linux的移动设备上的音频子系统,在任何时候都工作在最小功耗状态下。
DAPM对用户空间的应用程序来说是透明的,所有与电源相关的开关都在ASoc core中完成。
用户空间的应用程序无需对代码做出修改,也无需重新编译,DAPM根据当前激活的音频流(playback/capture)和声卡中的mixer等的配置来决定那些音频控件的电源开关被打开或关闭。
/******************************************************************************************* **********/声明:本博内容均由/droidphone原创,转载请注明出处,谢谢!/******************************************************************************************* **********/DAPM控件是由普通的soc音频控件演变而来的,所以本章的内容我们先从普通的soc音频控件开始。
snd_kcontrol_new结构在正式讨论DAPM之前,我们需要先搞清楚ASoc中的一个重要的概念:kcontrol,不熟悉的读者需要浏览一下我之前的文章:Linux ALSA声卡驱动之四:Control设备的创建。
通常,一个kcontrol代表着一个mixer(混音器),或者是一个mux(多路开关),又或者是一个音量控制器等等。
从上述文章中我们知道,定义一个kcontrol主要就是定义一个snd_kcontrol_new 结构,为了方便讨论,这里再次给出它的定义:[cpp]view plaincopystruct snd_kcontrol_new {snd_ctl_elem_iface_t iface; /* interface identifier * /unsigned int device; /* device/client number * /unsigned int subdevice; /* subdevice (substream) number */const unsigned char *name; /* ASCII name of item */ unsigned int index; /* index of item */unsigned int access; /* access rights */unsigned int count; /* count of same elements */snd_kcontrol_info_t *info;snd_kcontrol_get_t *get;snd_kcontrol_put_t *put;union {1snd_kcontrol_tlv_rw_t *c;const unsigned int *p;} tlv;unsigned long private_value;};回到Linux ALSA声卡驱动之四:Control设备的创建中,我们知道,对于每个控件,我们需要定义一个和他对应的snd_kcontrol_new结构,这些snd_kcontrol_new结构会在声卡的初始化阶段,通过snd_soc_add_codec_controls函数注册到系统中,用户空间就可以通过amixer或alsamixer等工具查看和设定这些控件的状态。
1.ASoC的由来ASoC--ALSA System on Chip <ALSA与芯片相关的部分>,是建立在标准ALSA驱动层上,为了更好的支持嵌入式处理器和移动设备中的音频Codec的一套软件体系。
在ASoC之前,内核对于SoC中的音频已经有部分的支持,不过有一些局限性:. Codec驱动与SoC CPU的底层耦合过于紧密,这种不理想会导致代码的重复,例如,wm8731的驱动,linux中有分别针对4个平台的驱动代码。
. 音频事件没有标准的方法来通知用户,例如耳机、麦克风的插拔和检测,这些事件在移动设备中是非常普通的,而且通常都需要特定的于机器的代码进行重新对音频路径进行配置。
. 当进行播放或录音时,驱动会让整个codec处于上电状态,这对于pc没问题,但对于移动设备来说,这意味着浪费大量的电量。
同时也不支持通过改变采样率和偏置电流来达到省电的目的。
ASoC正式为解决这些问题提出的,目前已经被整合到内核代码树中:sound/soc. ASoC 不能单独存在,他只是建立在标准ALSA驱动上,它必须和标准的ALSA驱动框架相结合才能工作2.硬件架构通常,就像软件领域里的抽象和重用一样,嵌入式设备的音频系统可以被划分为板载硬件(Machine)、Soc(platform)、Codec三大部分,如下图:. Machine 是指某一款机器,可以说是某款设备,由此可以看出Machine是不可重用的,每个Machine上的硬件实现可能都不一样,CPU不一样,Codec不一样,音频的输入,输出设备也是不一样,Machine为CPU、Codec、输入输出设备提供了一个载体。
. Platforn 一般是指某一个SoC平台,比如pxaxxx, s3cxxxx, omapxxx等,与音频相关的通常包含该SoC中的时钟、DMA、I2S、PCM等,只要指定了SoC,那么我们就可以认为它会有一个对应的platform,它只与SoC相关,与Machine无关,这样我们就可以把platform 抽象出来,使得同一款SoC不做改动就可以在不同的Machine中。
ALSA声卡驱动详解1.ALSA声卡驱动中的DAPM详解之一:kcontrolDAPM是Dynamic Audio Power Management的缩写,直译过来就是动态音频电源管理的意思,DAPM是为了使基于linux的移动设备上的音频子系统,在任何时候都工作在最小功耗状态下。
DAPM对用户空间的应用程序来说是透明的,所有与电源相关的开关都在ASoc core中完成。
用户空间的应用程序无需对代码做出修改,也无需重新编译,DAPM根据当前激活的音频流(playback/capture)和声卡中的mixer等的配置来决定那些音频控件的电源开关被打开或关闭。
/******************************************************************************************* **********/声明:本博内容均由/droidphone原创,转载请注明出处,谢谢!/******************************************************************************************* **********/DAPM控件是由普通的soc音频控件演变而来的,所以本章的内容我们先从普通的soc音频控件开始。
snd_kcontrol_new结构在正式讨论DAPM之前,我们需要先搞清楚ASoc中的一个重要的概念:kcontrol,不熟悉的读者需要浏览一下我之前的文章:Linux ALSA声卡驱动之四:Control 设备的创建。
通常,一个kcontrol代表着一个mixer(混音器),或者是一个mux (多路开关),又或者是一个音量控制器等等。
从上述文章中我们知道,定义一个kcontrol主要就是定义一个snd_kcontrol_new结构,为了方便讨论,这里再次给出它的定义:[cpp] view plaincopystruct snd_kcontrol_new {snd_ctl_elem_iface_t iface; /* interface identifier * /unsigned int device; /* device/client number * /unsigned int subdevice; /* subdevice (substream) number */const unsigned char *name; /* ASCII name of item */unsigned int index; /* index of item */unsigned int access; /* access rights */unsigned int count; /* count of same elements */snd_kcontrol_info_t *info;snd_kcontrol_get_t *get;snd_kcontrol_put_t *put;union {snd_kcontrol_tlv_rw_t *c;2const unsigned int *p;} tlv;unsigned long private_value;};回到Linux ALSA声卡驱动之四:Control设备的创建中,我们知道,对于每个控件,我们需要定义一个和他对应的snd_kcontrol_new结构,这些snd_kcontrol_new结构会在声卡的初始化阶段,通过snd_soc_add_codec_controls函数注册到系统中,用户空间就可以通过amixer 或alsamixer等工具查看和设定这些控件的状态。
LINUX⾳频驱动架构简介下⾳频驱动开发,要遵循标准的ALSA架构,下⾯分别从硬件架构、软件架构、驱动程序,3个⽅⾯分析。
硬件架构硬件上⾳频总线接⼝有很多,如I2S、PCM、TDM、SLIMBUS等,以I2S为例分析:I2S接⼝.png播放流程1. 使⽤I2C对CODEC做初始化配置。
2. ⾳频数据从外部flash读取到内存中。
3. 数据经过DMA送到I2S的TXFIFO。
4. 数据由TXFIFO送到CODEC硬件。
5. 在CODEC硬件⾥,数据从数字信号转变成模拟信号。
6. 模拟信号经过喇叭播放出来,就实现了声⾳的播放。
录⾳流程与播放流程相反,在第5步,从模拟信号变成数字信号,其他都⼀样软件架构-ALSA安卓的整体⾳频架构ALSA.png从上到下分别是:1. APP-HAL,安卓中的⾳频框架,⽤于适配LINUX内核。
2. ALSA-lib,LINUX内核⾳频驱动框架。
3. machine-codec驱动,硬件⾳频驱动程序。
驱动程序按照ALSA驱动框架要实现的接⼝有:driver.png各个部分功能分别是:1. DTS,⾳频硬件参数配置。
2. CPU DAI,CPU上的⾳频接⼝驱动,如I2S,PCM,SLIMBUS等。
3. platform,基于CPU的DMA接⼝封装,⽤于实现⾳频数据在内存和DMA之间流动。
4. CODEC DAI,CODEC上的⾳频接⼝驱动。
5. CODEC,CODEC⾃⾝驱动。
6. I2C,实现CODEC的配置接⼝。
7. machine,设备层⾯组装所有驱动,实现⾳频通路。
Linux驱动中的platform从Linux2.6 内核起,引入一套新的驱动管理和注册机制:platform_device和platform_driver 。
Linux 中大部分的设备驱动,都可以使用这套机制,设备用platform_device 表示;驱动用platform_driver 进行注册。
Linux platform driver 机制和传统的device driver 机制(即:通过driver_register 函数进行注册)相比,一个十分明显的优势在于platform 机制将设备本身的资源注册进内核,由内核统一管理,在驱动程序中用使用这些资源时,通过platform device 提供的标准接口进行申请并使用。
platform 是一个虚拟的地址总线,相比PCI、USB,它主要用于描述SOC 上的片上资源。
platform 所描述的资源有一个共同点:在CPU 的总线上直接取址。
平台设备会分到一个名称(用在驱动绑定中)以及一系列诸如地址和中断请求号(IRQ)之类的资源。
platform 总线下驱动的开发步骤是:1、设备需要实现的结构体是:platform_device 。
1)初始化resource 结构变量2)初始化platform_device 结构变量3)向系统注册设备:platform_device_register。
以上三步,必须在设备驱动加载前完成,即执行platform_driver_register()之前,原因是驱动注册时需要匹配内核中所有已注册的设备名。
platform_driver_register()中添加device 到内核最终还是调用的device_add 函数。
Platform_device_add 和device_add 最主要的区别是多了一步insert_resource(p, r),即将platform 资源(resource)添加进内核,由内核统一管理。
中图分类号:TP316 文献标识码:A 文章编号:1009-2552(2009)01-0073-03SoPC平台下ALSA标准声卡驱动设计与实现林 钦,刘佩林,应忍冬(上海交通大学电子工程系,上海200240)摘 要:介绍了SoPC平台下嵌入式Linux系统的ALSA音频子系统,针对Xilinx开发板的AC97控制器IP核,给出在嵌入式SoPC平台下音频驱动的设计方法及实现。
该设计方法充分利用Linux 内核对音频子系统提供的支持,克服嵌入式AC97控制器IP核IO缓冲区小的缺点,实现对该IP 核的驱动程序。
该驱动程序满足实时性要求,且在各SoPC平台具有可移植性。
关键词:SoPC;Linux;ALSA;驱动Design and implementation of ALSA sound driver on SoPC systemLIN Qin,LI U Pe-i lin,YING Ren-dong(Department of Electronic Engineering,Shanghai Jiaotong University,Shanghai200240,China) Abstract:A design method of ALSA sound driver based on AC97controller IP core in Xilinx SoPC Linux system is described,with introductions to architecture and sound driver ALSA which is a subsystem of Linux.B y taking full advantage of Linux sound subsystem,this design method largely decreases program complexity,and overcomes the shortcoming of e mbedded AC97controller whose I P core lacks IO me mory.The driver designed by this method meets the rea-l time specification and can be transplanted to other SoPC system.Key w ords:SoPC;Linux;ALSA;driver0 引言可编程片上系统SoPC(Syste m on a Program ming Chip)是一种新兴的嵌入式微处理器系统,其综合了通用处理器的灵活性和ASIC的高速性,是SoC (System on a Chip)片上系统和FPGA的结合。
1.Platform驱动在ASoC中的作用前面说过,ASoC被分为Machine、Platform和Codec三大部分,Platform驱动的主要作用是完成音频数据的管理,最终通过CPU的数字音频接口(DAI)把音频数据传送给codec进行处理,最终由codec输出驱动耳机或者喇叭的音频信号。
在具体的实现上。
ASoC把platform驱动分为两个部分:snd_soc_platform_driver和snd_soc_dai_driver。
其中。
Paltform_driver负责管理音频数据,把音频数据通过dma或者其他操作传送到cpu dai中,dai_driver主要完成cpu的dai的参数配置,同时会通过一定的途径把必要的dma 等参数与snd_soc_platform_driver进行交互2.snd_soc_platform_driver的注册通常,ASoC把snd_soc_platform_driver注册为一个系统的platform_driver,不要被这两个术语锁迷惑,前者是针对ASoC子系统,后者是来自linux的设备驱动模型,我们要做的就是. 定义一个snd_soc_platform_driver结构的实例. 在platform_driver的probe回调中利用ASoC的API:snd_soc_register_platform()注册上面定义的实例;. 实现snd_soc_pllatform_driver中的各个回调函数以kernel2.6.37中的/sound/soc/davinci/davinici-pcm.c为例Snd_soc_register_platform()该函数用于注册一个snd_soc_platform,只有注册以后,它才可以被Machine驱动使用,它的代码已经清晰的表达了它的实现过程. 为snd_soc_platform实例申请内存. 从platform_device中获取他的名字,用于Machine驱动的匹配工作;. 初始化snd_soc_platform的字段. 把snd_soc_platform实例链接到全局链表platform_list中. 调用snd_soc_instantiate_cards,触发声卡的machine、platform、codec、dai等的匹配工作3.cpu的snd_soc_dai driver驱动的注册dai驱动通常对应cpu的一个或者几个I2S/PCM接口,与snd_soc_platform一样,dai 驱动也就实现为一个platform driver,实现一个dai驱动大致可以分为以下几个步骤:. 定义一个snd_soc_dai_driver结构的实例;. 在对应的platform_driver中的probe回调中通过API:snd_soc_register_dai或者snd_soc_register_dais,注册snd_soc_dai实例;. 实现snd_soc_dai_driver结构中的probe、suspend等回调;. 实现snd_soc_dai_driver结构中的snd_soc_dai_ops字段中的回调函数;Snd_soc_register_dai这个函数在上一篇codec驱动总有介绍Snd_soc_dai该结构在snd_soc_register_dai函数中通过动态内存申请获得,有如下几个重要字段:. driver 指向关联的snd_soc_dai_sriver结构,由注册时通过参数传入;. Playback_dma_data用于保存该dai播放stream的dma信息,例如dma的目标地址,dma传送单元大小和通道号. Capture_dma_data同上,用于录音stream;. Platform 指向关联的snd_soc_platform结构;Snd_soc_dai_driver该结构需要自己根据不同的soc芯片进行定义,关键字段如下. probe、remove回调函数,分别在声卡加载和预卸时被调用;. suspend、resume 电源管理回调函数. Ops 指向snd_soc_dai_ops结构,用于配置和控制该dai;. Playback snd_soc_pcm_stream结构,用于指出该dai支持的声道数,码率,数据格式等. Capture snd_soc_pcm_stream结构,用于指出该dai支持的声道数,码率,数据格式4.Snd_soc_dai_driver中的ops字段Ops字段指向一个snd_soc_dai_ops结构,该结构实际上是一组回调函数的集合,dai的配置和控制几乎都是通过这些回调函数来实现的,这些回调函数基本可以分为3大类,驱动程序可以根据实际情况实现其中的一个部分工作始终配置函数通常由machine驱动调用:. set_sysclk 设置dai的主时钟. set_pll 设置PLL参数. set_clkdiv 设置分频系数. dai的格式配置函数通常由machine驱动调用:. set_fmt 设置dai的格式. set_tdm_slot 如果dai支持时分复用,用于设置时分复用的slot;. set_channel_map 声道的时分复用映射设置;. set_tristate 设置dai引脚的状态,当与其他dai并联使用同一个引脚时需要使用该回调标准的snd_soc_ops回调通常由soc-core在进行PCM操作时调用:. startup. Shutdown. Hw_params. Hw_free. Prepare. Trygger抗pop,pop声由soc-core调用;.digital_mute以下这些api通常被machine驱动使用,machine驱动在他的snd_pcm_ops字段中的hw_paarams回调中使用这些api:. Snd_soc_daiPset_fmt() 实际上会调用snd_soc_dai_ops或者codec driver中的set_fmt回调. Snd_soc_dai_set_pll() 实际上会调用snd_soc_dai_ops或者codec driver中的set_pll回调. Snd_soc_dai_set_sysclk() 实际上会调用snd_soc_dai_ops或者codec driver中的set_sysclk回调. Snd_soc_dai_set_clkdiv() 实际上会调用snd_soc_dai_ops或者codec driver中的set_clkdiv回调Snd_soc_dai_set_fmt(struct snd_soc_dai *dai, unsigned int fmt)的第二个参数fmt在这里特别说一下,ASoC目前只是用了它的低16位,并且为它专门定义了一些宏来方便我们使用:Bit 0-3用于设置接口的格式:Bit 4-7用于设置接口时钟的开关特性:Bit 8-11用于设置接口时钟的相位Bit 12-15用于设置接口的主从格式5.snd_soc_platform_driver中的ops字段该字段是一个snd_pcm_ops结构,实现该结构中的各个回调函数式soc platform驱动的主要工作,他们基本都涉及dma操作以及dma buffer的管理等工作。
下面介绍几个重要的回调函数:. Ops.open当应用程序打开一个pcm设备时,该函数会被调用,通常,该函数会使用snd_soc_set_runtime_hwparams()设置substream中的snd_pcm_runtime结构里面的hw_params相关字段,然后为snd_pcm_runtime的private_data字段申请一个私有结构,用于保存该平台的dma参数。
. Ops.hw_params驱动的hw_params阶段,该函数会被调用。
通常,该函数会通过snd_soc_dai_get_dma_data函数获得对应的dai的dma参数,获取的参数一般都会保存在snd_pcm_runtime结构的private_dta字段。
然后通过snd_pcm_set_rubtime_buffer函数设置snd_pcm_runtime结构中的dma buffer的地址和大小等参数,要注意,该回调可能被设置多次调用,具体实现是要小心处理多次申请资源的问题. Ops.prepare正式开始数据传送前会调用该函数,该函数通常会完成dma操作的必要准备工作。
. Ops.trigger数据传送的开始,暂停,恢复和停止时,该函数会被调用. Ops.pointer该函数返回传送数据的当前位置。
6.音频数据的dma操作Soc-platform驱动的最主要功能就是要完成音频数据的传送,大多数下,音频数据都是通过dma来完成。
6.1 申请dma buffer因为dma的特殊性,dma buffer是一块特殊的内存,比如有平台规定只有某段地址范围的内存才可以进行dma操作,而多数嵌入式平台还要求dma内存的物理地址是连续的,以方便dma控制器对内存的访问。
在ASoC架构中,dma buffer的信息保存在snd_pcm_substream结构的snd_dma_buffer *buf字段中在哪里完成snd_dma_buffer结构的初始化赋值,在snd_soc_platform_driver的pcm_new回调函数中,还是以/sound/soc/davinci/davinci-pcm.c为例Pcm_new字段指向了dma_new函数,dma_new函数进一步为playback和capture分别调用preallocate_dma_buffre函数。
我们可以看到preallocate_dma_buffer函数的实现该函数是先获得实现定义好的Buffer大小,然后通过dma_alloc_writecombine函数分配dma 内存,然后完成substream->dma_buffer的初始化赋值工作。
上述的pcm_new回调会在声卡的建立阶段被调用。
在声卡的hw_params阶段,snd_soc_platform_driver结构的ops->hw_params会被调用,在该回调通常使用api: snd_pcm_set_runtime_buffer()把substream->dma_buffer的数值拷贝到substream->runtime的相关字段中(.dma_area, .dma_addr, .dma_bytes),这样以后就可以通过substream->runtime或的这些地址和大小信息了。