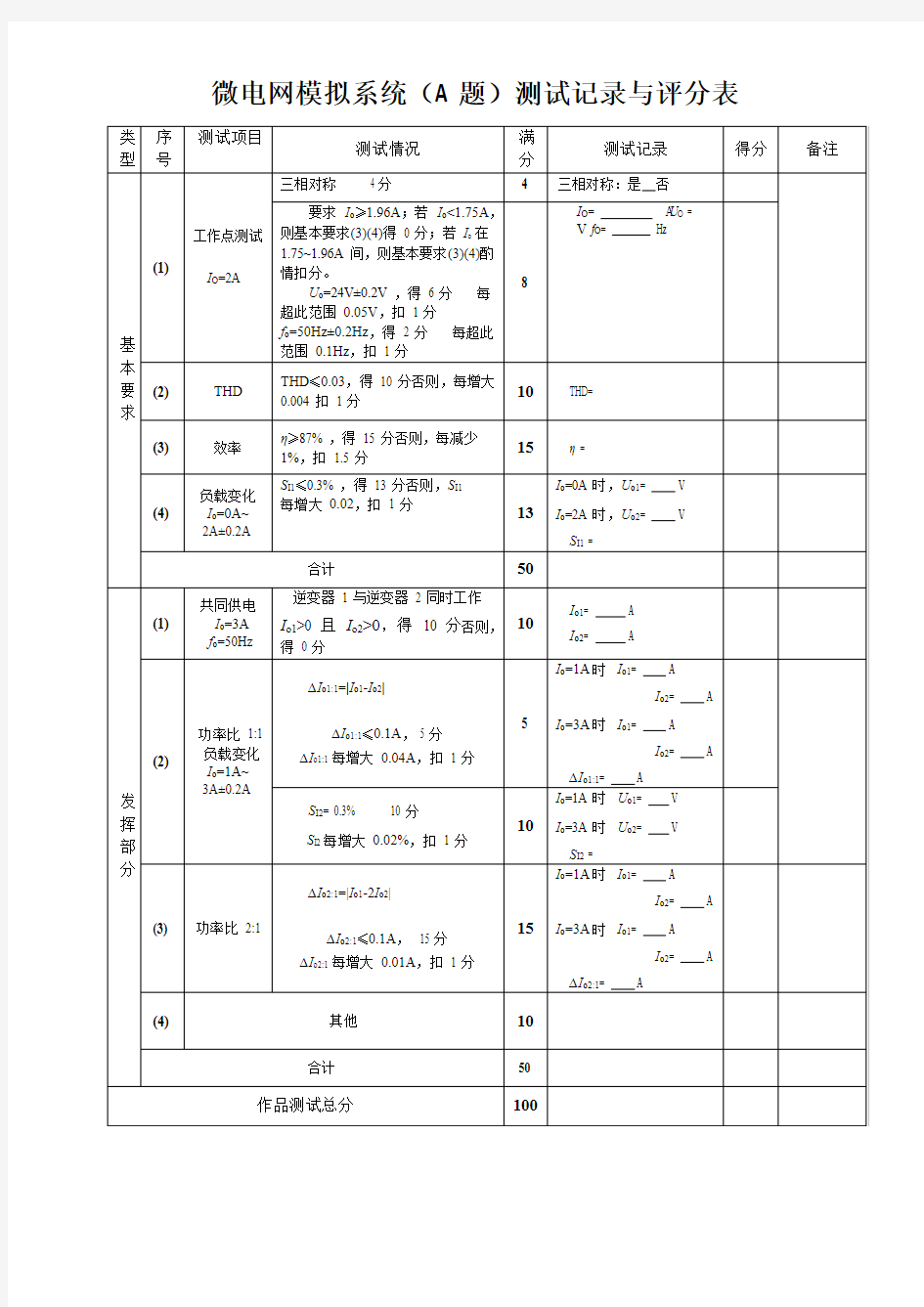

微电网模拟系统(A 题)测试记录与评分表
滚球控制系统(B 题)测试记录与评分表
四旋翼自主飞行器探测跟踪系统(C题)测试记录与评分表
自适应滤波器(E 题)测试记录与评分表
调幅信号处理实验电路(F 题)测试记录与评分表
远程幅频特性测试装置(H 题)测试记录与评分表
R L= 600,V opp在5mV
至100mV之间可调
输出幅度:R L= 600
V opp≥ 1 V,无明显失
真。
输出幅度:电源电压为
5V,
R L= 600,V orms≥ 1 V
可见光室内定位装置(I 题)测试记录与评分表
单相用电器分析监测装置(K 题)测试记录与评分表
自动泊车系统(L 题)测试记录与评分表
管道内钢珠运动测量装置(M 题)测试记录与评分表
直流电动机测速装置(O 题)测试记录与评分表
简易水情检测系统(P题)测试记录与评分表
2017年全国大学生电子设计竞赛简易水情检测系统(P题) 2017年8月12日
摘要 本设计的是简易水情检测系统以STC89C52芯片为核心,辅以相关的外围电路,设计了以单片机为核心的水情检测系统。系统主要由5V电源供电。在硬件电路上在,用总线连接PH值传感器和水位传感器,通过传感器收集到的水情数据发送到单片机,单片机存储实时数据,并显示在12864LCD液晶屏上。在软件方面,采用C语言编程。通过对单片机程序设计实现对水情检测系统的水情数据的采集、显示和检测。 关键词:单片机最小系统;PH值传感器;水位传感器;AD模块 Abstract The design is a simple water regime detection system to STC89C52 chip as the core, supplemented by the relevant external circuit, designed to single-chip as the core of the water regime detection system. The system is powered by 5V power supply. In the hardware circuit, with the bus connection PH sensor and water level sensor, through the sensor to collect the water data sent to the microcontroller, single-chip storage of real-time data, and displayed on the 12864LCD LCD screen. In software, the use of C language programming. Through the single-chip program design to achieve the water regime detection system of water data collection, display and detection. Key words:single chip minimum system; PH value sensor; water level sensor; capacitance
大学生电子设计竞赛设 计报告 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
2017年全国大学生电子设计竞赛XXX控制系统(A/B/C题) 2017年8月12日
摘要(小四、宋体,300字以内) 关键词:脉宽;脉冲;数显;电容(小四、宋体)
XXX控制系统(A/B/C题) 【本科组】 一、系统方案 本系统主要由单片机控制模块、XXX模块、XXX模块、电源模块组成,下面分别论证这几个模块的选择。 1、主控制器件的论证与选择 单片机比较 方案一:采用传统的51系列单片机。 XXXXXX. 方案二:采用以增强型80C51内核的STC系列单片机 XXXXXX 通过比较,我们选择方案二。 方案一:采用在面包板上搭建简易单片机系统 在面包板上搭建单片机系统可以方便的对硬件做随时修改,也易于搭建,但是系统连线较多,不仅相互干扰,使电路杂乱无章,而且系统可靠性低,不适合本系统使用。 方案二:自制单片机印刷电路板 自制印刷电路实现较为困难,实现周期长,此外也会花费较多的时间,影响整体设计进程。不宜采用该方案。 方案三:采用单片机最小系统。 单片机最小系统包含了显示、矩阵键盘、A/D、D/A等模块,能明显减少外围电路的设计,降低系统设计的难度,非常适合本系统的设计。 综合以上三种方案,选择方案三。 2、XXXX的论证与选择 方案一:XXX。XXXX 方案二:XXX。XXXX 方案三:XXX。XXXX 综合以上三种方案,选择方案三。
3、控制系统的论证与选择 方案一:XXX。XXXX 方案二:XXX。XXXX 综合考虑采用XXXXX。 二、系统理论分析与计算 1、XXXX的分析 (1)XXX XXXX (2)XXX XXXX (3)XXX XXXX 2、XXXX的计算 (1)XXX XXXX (2)XXX XXXX (3)XXX XXXX 3、XXXX的计算 (1)XXX XXXX (2)XXX XXXX (3)XXX XXXX 三、电路与程序设计 1、电路的设计 (1)系统总体框图 系统总体框图如图X所示,XXXXXX 图X 系统总体框图
第九届全国周培源大学生力学竞赛试题参考答案 出题学校: 第 1 题 (15 分) (1) ω0 = (2) ?∠OAO ′ = 4 。 3Eb 第 2 题(25 分) 3π3σp d 2 σp d 2 (1) [F ] = ≈ 0.4651 。 200n n (2) 不会波动,证明见详细解答。 (3) 可以,许用荷载 多可提高 76.7%。 第 3 题(25 分) (1) α 1 =0, α 2 = arccos 100 = 45o 。 200 (2) x 2 = 200y 。 (3) 长度 2L 小于 200 mm 的杆水平放置的平衡是稳定的。长度大于 200 mm 的杆水平放置的平衡是不稳定的,处于角度 α= arccos 100 上的平衡是稳定的。 L 第 4 题(30 分) 195E πd 3ε max (1) F = 。 5248L (2) 可以,原因见详细解答。 (3) 除了温度补偿片,至少还应该贴 3 个应变片。 J 截面的上顶点处沿轴向贴一个应变片 ε(1) , 另外两个应变片 ε (2) 和 ε (3) 应该贴在 J 截面水平直径的两端处,并沿着与轴线成 45°夹角的方向 L g 75 。 2 3 10 GL
1 E πd 3(ε +ε ) 3E πd 2 (ε ?ε ) 上粘贴。M J = E πd 3ε (1) ,T J = (2) (3) ,F S J = (2) (3) 。 32 32(1+ν) 32(1+ν) 第 5 题(25 分) (1) e =。 (2) v C =???? 65 + 5482π???? gL 。 详细参考解答及评分标准 评分总体原则 各题均不限制方法。若方法与本文不同,只要结果和主要步骤正确,即给全分;若方法不同而结果不正确,各地自行统一酌情给分。本文中多处用图形解释,若试卷中未出现相应图形但已表达了同样的意思,则同样给分。计算结果用分数或小数表达均可。 本文中用浅黄色标识的公式和文字是给分的关键点,其后圆圈内的数字仅为本处的所得分值。 第 1 题(15 分) 图 1-1 为某个装在主机上的旋转部件的简图。四个重量为G ,厚度为b ,宽度为3b ,长度为 L ,弹性模量为 E 的均质金属片按如图的方式安装在轴 OO ′ 上。在 A 处相互铰结的上下两个金属片构成一组,两组金属片关于轴 OO ′ 对称布置。两组金属片上方均与轴套 O 铰结,且该轴套处有止推装置,以防止其在轴向上产生位移。两组金属片下方均与O ′ 处的轴套铰结,该轴套与轴 OO ′ 光滑套合。当主机上的电动机带动两组金属片旋转时,O ′ 处的轴套会向上升起。但轴套上升时,会使沿轴安装的弹簧压缩。弹簧的自然长 度为2L ,其刚度 k = 23G 。O 和O ′ L 处的轴套、弹簧,以及各处铰的重量均可以忽略。 (1) 暂不考虑金属片的变形,如果在匀速转动时O ′ 处轴套向上升起的高度 H = L 是额定的工作状态,那么相应的转速ω0 是多少? (2) 当转速恒定于ω0 时,只考虑金属片弯曲变形的影响,试计算图示角度 ∠OAO ′ 相对于把金属片视为刚 体的情况而言的变化量。 图 1-1 ω O A L b H O ′
2017年全国大学生电子设计竞赛远程幅频特性测试仪(H题) 2017年08月12日
摘要 本幅频特性测试装置采用STM32F407为主控芯片,通过集成DDS芯片AD9959作为信号源,实现了幅度和频率的动态可调;通过级联两块AD8367作为放大器,实现了增益0-40dB连续可调,具有较好的噪声抑制效果;通过AD8310对数检波模块,实现了不同频率信号幅度的测量,并且能够定性的绘制出幅频特性曲线. 关键词:幅频特性测试装置;DDS;VGA;低噪;对数检波 Abstract The amplitude frequency characteristic test device uses STM32F407 as the main control chip, through the integrated DDS chip AD9959 as the signal source, to achieve the amplitude and frequency of the dynamic adjustable; through the cascade of two AD8367 as an amplifier, to achieve a gain of 0-40dB continuously adjustable , With good noise suppression effect; through the AD8310 logarithmic detection module, to achieve a different frequency signal amplitude measurement, and can qualitatively draw the amplitude and frequency characteristics of the curve. Keyword: amplitude frequency characteristic test device;DDS;VGA;low noise;logarithmic detection
全国周培源大学生力学竞赛考试范围(参考) 理论力学 一、基本部分 (一) 静力学 (1) 掌握力、力矩和力系的基本概念及其性质。能熟练地计算力的投影、力对点的矩和力对轴的矩。 (2) 掌握力偶、力偶矩和力偶系的基本概念及其性质。能熟练地计算力偶矩及其投影。 (3) 掌握力系的主矢和主矩的基本概念及其性质。掌握汇交力系、平行力系与一般力系的简化方法、熟悉简化结果。能熟练地计算各类力系的主矢和主矩。掌握重心的概念及其位置计算的方法。 (4) 掌握约束的概念及各种常见理想约束力的性质。能熟练地画出单个刚体及刚体系受力图。 (5) 掌握各种力系的平衡条件和平衡方程。能熟练地求解单个刚体和简单刚体系的平衡问题。 (6) 掌握滑动摩擦力和摩擦角的概念。会求解考虑滑动摩擦时单个刚体和简单平面刚体系的平衡问题。 (二)运动学 (1) 掌握描述点运动的矢量法、直角坐标法和自然坐标法,会求点的运动轨迹,并能熟练地求解点的速度和加速度。 (2) 掌握刚体平移和定轴转动的概念及其运动特征、定轴转动刚体上各点速度和加速度的矢量表示法。能熟练求解定轴转动刚体的角速度、角加速度以及刚体上各点的速度和加速度。 (3) 掌握点的复合运动的基本概念,掌握并能应用点的速度合成定理和加速度合成定理。 (4) 掌握刚体平面运动的概念及其描述,掌握平面运动刚体速度瞬心的概念。能熟练求解平面运动刚体的角速度与角加速度以及刚体上各点的速度和加速度。 (三)动力学 (1) 掌握建立质点的运动微分方程的方法。了解两类动力学基本问题的求解方法。 (2) 掌握刚体转动惯量的计算。了解刚体惯性积和惯性主轴的概念。 (3) 能熟练计算质点系与刚体的动量、动量矩和动能;并能熟练计算力的冲量(矩),力的功和势能。 (4) 掌握动力学普遍定理(包括动量定理、质心运动定理、对固定点和质心的动量矩定理、动能定理)及相应的守恒定理,并会综合应用。 (5) 掌握建立刚体平面运动动力学方程的方法。了解其两类动力学基本问题的求解方法。 (6) 掌握达朗贝尔惯性力的概念,掌握平面运动刚体达朗贝尔惯性力系的简化。掌握质点系达朗贝尔原理(动静法) ,并会综合应用。了解定轴转动刚体静平衡与动平衡的概念。 二、专题部分 (一) 虚位移原理 掌握虚位移、虚功的概念;掌握质点系的自由度、广义坐标的概念;会应用质点系虚位移原理。 (二) 碰撞问题 (1) 掌握碰撞问题的特征及其简化条件。掌握恢复因数概念 (2) 会求解两物体对心碰撞以及定轴转动刚体和平面运动刚体的碰撞问题。 材料力学 一、基础部分 材料力学的任务、同相关学科的关系,变形固体的基本假设、截面法和内力、应力、变形、应变。 轴力与轴力图,直杆横截面及斜截面的应力,圣维南原理,应力集中的概念。 材料拉伸及压缩时的力学性能,胡克定律,弹性模量,泊松比,应力-应变曲线。
全国周培源大学生力学竞赛范围(参考) 理论力学 一、静力学部分 1. 掌握力、力矩和力系的基本概念及其性质。能熟练地计算力的投影、力对点的矩和力对轴的矩。 2. 掌握力偶、力偶矩和力偶系的基本概念及其性质。能熟练地计算力偶矩及其投影。 3. 掌握力系的主矢和主矩的基本概念及其性质。掌握汇交力系、平行力系与一般力系的简化方法、熟悉简化结果。能熟练地计算各类力系的主矢和主矩。掌握重心的概念及其位置计算的方法。 4. 掌握约束的概念及各种常见理想约束力的性质。能熟练地画出单个刚体及刚体系受力图。 5. 掌握各种力系的平衡条件和平衡方程。能熟练地求解单个刚体和简单刚体系的平衡问题。 6. 掌握滑动摩擦力和摩擦角的概念。会求解考虑滑动摩擦时单个刚体和简单平面刚体系的平衡问题。 二、运动学部分 1. 掌握描述点运动的矢量法、直角坐标法和自然坐标法,会求点的运动轨迹,并能熟练地求解点的速度和加速度。 2. 掌握刚体平移和绕定轴转动的概念及其运动特征、绕定轴转动刚体上各点速度和加速度的矢量表示法。能熟练求解绕定轴转动刚体的角速度、角加速度以及刚体上各点的速度和加速度。 3. 掌握点的复合运动的基本概念,掌握并能应用点的速度合成定理和加速度合成定理。 4. 掌握刚体平面运动的概念及其描述,掌握平面运动刚体速度瞬心的概念。能熟练求解平面运动刚体的角速度与角加速度以及刚体上各点的速度和加速度。 三、动力学部分 1. 掌握建立质点的运动微分方程的方法。了解两类动力学基本问题的求解方法。 2. 掌握刚体转动惯量的计算。了解刚体惯性积和惯性主轴的概念。 3. 能熟练计算质点系与刚体的动量、动量矩和动能;并能熟练计算力的冲量(矩),力的功和势能。 4. 掌握动力学普遍定理(包括动量定理、质心运动定理、对固定点和质心的动量矩定理、动能定理)及相应的守恒定律,并会综合应用。 5. 掌握建立刚体平面运动动力学方程的方法。了解其两类动力学基本问题的求解方法。 6. 掌握达朗贝尔惯性力的概念,掌握平面运动刚体达朗贝尔惯性力系的简化。掌握质
附件2 比赛题目及评分标准 【题目一】Xilinx哈夫曼编码 1.设计要求 要求对一段数据序列进行哈夫曼编码,使得平均码长最短,输出各元素编码和编码后的数据序列。 (1)组成序列的元素是[0-9]这10个数字,每个数字其对应的4位二进制数表示。比如5对应0101,9对应1001。 (2)输入数据序列的长度为256。 (3)先输出每个元素的编码,然后输出数据序列对应的哈夫曼编码序列。 2.电路接口 RTL级代码顶层模块名统一为HuffmanCoding,可参考电路接口与时序如下:(可以根据自身设计需求,对电路接口进行修改) module HuffmanCoding( input wire clk, input wire rst_n, input wire [3:0] data_in, input wire start, output wire output_data, output wire output_start, output wire output_done ); 1
clk rst_n start output_done (1)复位之后,当start信号高有效后开始连续输入256个数据序列,data_in数据宽度为4,输入需要256个时钟周期。 (2)经过运算后,output_start信号高有效后,开始输出结果output_data。output_data信号数据宽度是1,因此输出是二进制序列。最后output_done 高有效说明整个编码过程结束。 (3)output_data数据包含2个部分。先输出[0-9]这10个数字的哈夫曼编码(具体的输出格式可以自行设定),然后输出数据序列哈夫曼编码后的序列。 评分标准: 1. TestBench 建议先用C/C++或者Matlab等高级语言实现上述哈夫曼编码设计需求,并以此为基准,作为电路仿真的TestBench。 2. 电路功能 电路功能的完成情况,包括是否满足设计要求、源代码、仿真程序和文档说明等。要求代码书写规范,可读性强。严禁抄袭,如果需要使用第三方IP或者借鉴其他人的部分源码,请注明出处。 3. 性能 2
2017年全国大学生电子设计竞赛 管道内钢珠运动测量装置(M题) 【高职高专】
摘要: 系统以STC15W4K61S4单片机为主控器,设计一款管道内钢珠运动测量装置。该装置可以获取管道内钢珠滚动的方向,以及倒入管道内钢珠的个数和管道的倾斜角度。并通过LCD12864液晶显示屏实时显示钢珠滚动方向、个数以及管道的倾斜角度。系统包括单片机主控模块、角度信号采集模块、磁力传感器模块、显
示模块、电源模块、采用稳压输出电源为系统提供工作电源。系统制作成本较低、工作性能稳定,能很好达到设计要求。 关键词:角度传感器、磁性接近开关、LCD12864 目录 1设计任务与要求 (1) 1.1设计任务 (1) 1.2技术指标 (1) 1.3题目评析 (1)
2方案比较与选择 (2) 2.1单片机选择 (2) 2.2角度测量选择 (2) 2.3 钢珠运动检测选择 (2) 2.4显示选择 (2) 2.5电源选择 (2) 3电路系统与程序结构设计 (3) 3.1系统硬件总体设计 (3) 3.2单片机最小系统模块设计 (3) 3.3角度传感器模块设计 (3) 3.4 磁性传感器模块设计 (4) 3.5显示模块设计 (4) 3.6电源模块设计 (4) 3.7程序结构与设计 (5) 4系统测试 (5) 5总结 (6) 参考文献及附录 (6)
1设计任务与要求 1.1设计任务 设计并制作一个管道内钢珠运动测量装置,钢珠运动部分的结构如图1.1所示。 1.2技术指标 1.基本要求 规定传感器宽度 w≤20mm,传感器1和2之间的距离l 任意选择。 (1)按照图1.1所示放置管道,由A 端放入2~10粒钢珠,每粒钢珠放入的时 间间隔≤2s,要求装置能够显示放入钢珠的个数。 (2)分别将管道放置为A 端高于B 端或B 端高于A 端,从高端放入1粒钢 珠,要求能够显示钢珠的运动方向。 (3)按照图1.1所示放置管道,倾斜角ɑ为10o~80o之间的某一角度,由A 端放入1粒钢珠,要求装置能够显示倾斜角ɑ的角度值,测量误差的绝对≤3o。 2.发挥部分 设定传感器1和2之间的距离l 为20mm ,传感器1和2在管道外表面上安放的位置不限。 (1)将1粒钢珠放入管道内,堵住两端的管口,摆动管道,摆动周期≤1s , 摆动方式如图1.2所示,要求能够显示管道摆动的周期个数。 (2)按照图1.1所示放置管道,由A 端一次连续倒入2~10粒钢珠,要求装置 能够显示倒入钢珠的个数。 (4)其他。 3.设计报告。 1.3题目评析 根据设计要求,对题目评析如下: 本题的重点: ① 传感器灵敏度的选择。 ② 用于钢珠运动检测的传感器选择 图1.1:管道内钢珠运动测量装置的结构图 图1.2:管道摆动方式
大学生力学竞赛模拟题 ------江苏技术师范学院 一、连日大雨,河水猛涨,一渡船被河水冲到河中央,摆渡人眼疾手快,立刻从岸上拉住船上的缆绳以便拖住渡船,可惜水流太急,渡船仍然向下游冲去。这时,摆渡人看到一木桩,并立刻将缆绳在木桩上绕了几圈,就拉住了冲向下游的渡船。 (1) 本问题与力学中的什么内容有关系 (2) 利用木桩拉住渡船,则摆渡人少使多少力? (3) 如果水对渡船的推力为20kN ,而摆渡人的最大拉力为500N ,木桩与缆绳之间的摩擦系数 3.0=f ,则为了能使渡船停止运动至少将缆绳在木桩上绕几圈?若缆绳横截面面积为3002mm , 木桩直径为20cm ,木桩至渡船的缆绳长10m ,弹性模量E=100GPa ,忽略木桩至手拉端绳的变形,试计算缆绳的总伸长量。 题1图 一、解:(1)、关键词:摩擦,轴向拉伸 (2)、设手拉端的拉力为人F ,船的拉力为船F ,缆绳和木桩接触的各处有径向压力和切向摩擦力作用,如图(1-a )所示。任取一微段(图(1-b )),由微段的平衡条件
(1-a ) (1-b ) 0=∑r F 02 s i n 2s i n )(=-+-θ θd F d dF F dF r (1) 0=∑θF ()02 c o s 2c o s =--+r f d F d F d dF F θ θ (2) 对于微小角度θd ,可令 2 2sin θθd d ≈,12cos ≈θd ,并略去高阶微量2θd dF ?,即得 fF d dF =θ (3) 分离变量,积分得 θ f Ae F = (4) 其中积分常数由缆绳两端的边界条件确定,有 0=θ, 船F F =; 船F A = 所以,绕在木桩上缆绳任一截面的拉力为 θf e F F 船= (5) 所以 θf e F F =船 人,其中θ为缆绳绕过木桩的角度。 (3)、将N F 500=人,kN F 20=船,f = 0.3代入式(5),得θ3.031020500e ?= 解得 3.12≈θ rad 所以至少将缆绳绕两圈。 当πθ4=,考虑微段(图(1-b ))的伸长 ()θθθ d e EA R F EA Rd F d f 船绕== ? (6) 则环绕部分的缆绳伸长量 )1(440 -==?=?? ?ππθθf f e EAf R F d e EA R F d 船船绕绕 (7) 代入已知数据计算的,mm 43.9=?绕 木桩至船段的缆绳伸长量 mm EA l F 7.610 3001010010 200006 92=????= =?-船 (8) 总变形量 mm 13.162=?+?=?绕
第一届四川省大学生力学竞赛理论力学试题学校名称姓名 1.(6分)二根弯杆AB、BC质量不计,在A、B、 C处用光滑铰链连接,其上分别作用大小为M、 转向相反的力偶,几何尺寸如图所示,则A处的 约束力大小为,作用线与水平 面的夹角为。 2.(8分)各杆自重不计,尺寸及几何关系如图 所示。杆AC的A端和B处分别靠在粗糙的墙 上和杆BD的端部,D为光滑固定铰支座,C 处作用一铅垂力F 。若要系统平衡,则A处和 B处的摩擦系数最小值应分别为 和。 3.(12分)如图所示,三根等长且质量不计的杆 相互用光滑铰链连接成一构架,铰接点C、D、E 分别为杆DH、BE、AC的中点,杆BE水平,A、 B处分别是固定铰支座和可动铰支座约束。如在 杆DH上端点H处作用一铅垂力F,则铰C、D、 E处的约束力的大小分别为 、、 。
4.(6分)一空间力的大小为F ,作用线 过边长为l 的正方体的顶点C 和D ,方向 如图示,则该力对过正方体顶点O 和G 的轴ζ 的矩为 。 5.(6分)已知平面运动刚体上两点A 和 B 的加速度大小分别为A a 和B a ,方向如 图所示,则刚体上位于AB 连线中点C 的加 速度大小为 。 6.(12分)已知机构中长为r 的曲柄OA 在 图示瞬时以匀角速度ω 绕轴 O 转动;连杆 AB 长为2 r ,套筒C 可在连杆AB 上滑动, 从而带动杆CD 上下运动,如在图示瞬时, AC = CB ,OA 铅垂且垂直于OB ,则该瞬时 杆CD 的速度大小为 ,加 速度大小为 。 7.(12分)半径为r 的轮O 在水平地面上 作纯滚动。一杆AB 斜靠在它上面,杆与轮之间 无相对滑动,杆端A 不脱离地面。已知杆端A 的速度v 0 为常数,则当杆与地面夹角θ = 60o 时, 杆AB 的角速度大小为 ;轮O 的角速度大小为 ;杆AB 的角加 速度大小为 ;轮O 的角加速度 大小为 。
2017年全国大学生电子设计竞赛试题 参赛注意事项 (1)8月9日8:00竞赛正式开始。本科组参赛队只能在【本科组】题目中任选一题;高 职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。 (2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。 (3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生 身份的有效证件(如学生证)随时备查。 (4)每队严格限制3人,开赛后不得中途更换队员。 (5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设 计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。 【本科组】 一、任务 设计并制作一远程幅频特性测试装置。 二、要求 1.基本要求 (1)制作一信号源。输出频率范围:1MHz - 40MHz ;步进:1MHz ,且具有自动 扫描功能;负载电阻为600Ω时,输出电压峰峰值在5mV - 100mV 之间可调。 (2)制作一放大器。要求输入阻抗:600Ω;带宽:1MHz - 40MHz ;增益:40dB , 要求在0 - 40 dB 连续可调;负载电阻为600Ω时,输出电压峰峰值为1V ,且波形无明显失真。 (3)制作一用示波器显示的幅频特性测试装置,该幅频特性定义为信号的幅度随 频率变化的规律。在此基础上,如图1所示,利用导线将信号源、放大器、幅频特性测试装置等三部分联接起来,由幅频特性测试装置完成放大器输出信号的幅频特性测试,并在示波器上显示放大器输出信号的幅频特性。 图1 远程幅频特性测试装置框图(基本部分) 2.发挥部分 (1)在电源电压为+5V 时,要求放大器在负载电阻为600Ω时,输出电压有效值为1V ,且波形无明显失真。
2017电子设计大赛题目 复合信号发生器使用题目指定的综合测评板上的两片 READ2302G(双运放)和一片 HD74LS74 芯片设计制作一个复合信号发生器。给出方案设计、详细电路图和现场自测数据波形(一律手写、3 个同学签字、注明综合测试板编号),与综合测试板一同上交。设计制作要求如图 1 所示。设计制作一个方波产生器输出方波,将方波产生器输出的方波四分频后再与三角波同相叠加输出一个复合信号,再经滤波器后输出一个正弦波信号。 图1 1. 方波产生器输出信号参数要求:Vo1pp=3V±5%,f=20kHz±100Hz,输出电阻 Ro=600 欧姆,波形无明显失真; 2. 四分频方波输出信号参数要求:V03pp=1V ±5%,f=5kHz±100Hz,输出电阻 Ro=600 欧姆,波形无明显失真; 3. 三角波产生器输出信号参数要求:Vo2pp=1V±5%,f=5kHz±100Hz,输出电阻 Ro=600 欧姆,波形无明显失真; 4. 同相加法器输出复合信号参数要求:Vo4pp=2V±5%,f=5kHz±100Hz,输出电阻 Ro=600 欧姆,波形无明显失真; 5. 滤波器输出正弦波信号参数要求:Vo5pp=3V±5%,f=5kHz±100Hz,输出 2 电阻 Ro=600 欧姆,波形无明显失真; 6. 每个模块的输出的负载电阻为 600 欧姆,应标示清楚、置于明显位置,便于检查。 7. 给出方案设计、详细电路图和现场自测数据波形(一律手写、3 个同学签字、注明综合测试板编号),与综合测试板一同上交。 8、电源只能选用+5V 单电源,由稳压电源供给。不得使用额外电源。 9、要求预留方波 Vo1pp、四分频后方波 Vo3pp、三角波 Vo2pp、同相加法器输出复合信号 Vo4pp、滤波器输出正弦波 Vo5pp 和+5V 单电源的测试端子。注意:不能外
湖南省第十届大学生力学竞赛试题 (竞赛时间:180分钟) 请将答案写在相应横线上,答案正确给全分,答案不正确给零分。只算16题的总分。 理论力学部分 一、(4分,长沙理工大学供题)一个匀质对称的酒杯支架放在水平面上,其正视图和俯视图如图所示,支架上有六个挂杯点(杯的重心位置)A 、B 、C 、D 、E 、F 等分半径为R 的圆。已知每个酒杯重量为P ,支架的总重量为6P 。要求在任何挂或取杯情况时支架不倾倒,则设计支架底座圆盘的半径r 应满足 r ≥___________(4分)。 题一图 题二图 密 封 线
二、(8分,湖南大学供题)如图所示,均质轮O 置于水平面上,杆HC 垂直轮轴O 搁置于轮和平面上,杆与水平面倾角为60°, 轮与杆及水平面之间的接触点A 、B 和 C 处均有摩擦,使得杆与轮保持静止。现将不计大小的物块D 轻置于杆HC 上的A 点,并由静止沿杆无摩擦加速下滑。设轮、杆与物块D 质量均为m ,杆的重心位于AC 中点E ,AC 长为l ,试分析下述问题: (1)轮与杆保持静止的条件之一是其两者之间的静摩擦因数最小应为 (3分); (2)设A 与C 处的摩擦足够大,则维持B 处不滑动的最小静摩擦因数值等于 (5分)。 三、(5分,湖南农业大学供题)一半径为r 的半圆柱放在另一半径为R 固定于水平面的半圆柱上,如图所示。静止时上面一个半圆柱的重心C 与接触点A 的距离为d ,并假定任意接触处不会发生相对滑动。试求该系统在图示位置稳定平衡时d 的最大值为 (5分)。 题三图 题四图 四、(10分,国防科技大学供题)图示平面机构中 杆OA 以等角速度 0作定轴转动,半径为r 的滚轮在杆OA 上作纯滚动,O 1B 杆绕O 1轴转动并与轮心B 铰接,在图示瞬时O 、B 在同一水平线上,且 O 1B 长为2r ,处于在铅垂位置,则此瞬时 (1)滚轮的角速度大小为 (3分); (2)滚轮的角加速度大小为 (7分)。 五、(10分,吉首大学)在图示系统中,已知匀质圆轮A 的质量为m ,半径为r ,物块B 质量为 2 m ,斜面与水平面倾角为 30,定滑轮质量忽略不计,并假设斜绳段平行斜面。试求解如下问题: (1)若斜面粗糙,圆轮纯滚时轮心加速度大小为 (4分); (2)若斜面光滑,圆轮轮心加速度大小为 (6分)。 r 2
2017全国大学生电子设计竞赛H 题
————————————————————————————————作者:————————————————————————————————日期:
个人收集整理,勿做商业用途 2017年全国大学生电子设计竞赛远程幅频特性测试仪(H题)
2017年08月12日 摘要 本幅频特性测试装置采用STM32F407为主控芯片,通过集成DDS芯片AD9959作为信号源,实现了幅度和频率的动态可调;通过级联两块AD8367作为放大器,实现了增益0-40dB连续可调,具有较好的噪声抑制效果;通过AD8310对数检波模块,实现了不同频率信号幅度的测量,并且能够定性的绘制出幅频特性曲线. 关键词:幅频特性测试装置;DDS;VGA;低噪;对数检波 Abstract The amplitude frequency characteristic test device uses STM32F407 as the main control chip, through the integrated DDS chip AD9959 as the signal source, to achieve the amplitude and frequency of the dynamic adjustable; through the cascade of two AD8367 as an amplifier, to achieve a gain of 0-40dB continuously adjustable , With good noise suppression effect; through the AD8310 logarithmic detection module, to achieve a different frequency signal amplitude measurement, and can qualitatively draw the amplitude and frequency characteristics of the curve.
湖南省第六届大学生力学竞赛试题——材料力学 (竞赛时间:180分钟) 请将答案写在相应横线上,答案正确给全分,答案不正确给零分。 一、刚性横梁AB 由四根长为i l (1,2,3,4)i =的钢丝悬挂,每根钢丝的拉伸刚度均为EA ,第i 根钢丝距A 端的距离为i a ,在未受力时横梁AB 处于水平位置,今在AB 上作用载荷P 。则: (1)结构的静不定度为 (2分); (2)用各杆轴力N i (1,2,3,4)i =表示的变形协调条件为 (4分); (3)今欲使刚性横梁仍保持水平,则P 力距A 端的距离x = (4分)。 题一图 题二图 二、左端固定的圆截面轴由两种材料组成,并且内、外两轴紧密接合,截面尺寸及材料性质见下表。 密 封 线
今在轴表面沿与母线成45°方向焊上一直径为1mm 的细铜丝ab (把铜丝拉直,在两端焊牢,且无初始应力),铜的弹性模量为E 0=8×104MPa 。在轴的右端加上力偶矩m 0=1.2kN·m 。则: (1)内轴扭矩T (x ) = (3分); (2)外轴扭矩T (x ) = (3分); (3)细铜丝横截面上的应力σ= (6分); 三、如图所示一根足够长的钢筋,放置在两刚性平台上,在CD 中点K 处作用载荷F 。钢筋单位长度的重量为q ,抗弯刚度为EI 。则 (1)C 、D 处刚好脱离桌面时,F = ;(4分) (2)当F =2qa 时,K 点的位移为 。(3分) (3)当F =0时,K 截面的弯矩与a 的关系为 ;(5分) 题三图 题四图 四、图示梁杆系统,梁CD 与杆AB 间存在一微小间隙δ,M - M 为与杆AB 连接的不变形刚体。一重量为P 的环状物体从高度/3h a =处自由下落冲击刚体M - M 。设冲击过程发生在线弹性范围内,且不计梁和杆的质量,也不考虑杆的压缩稳定性。已知梁的弯曲刚度为EI ,杆的拉压刚度为EA ,且2EI a EA =。试求: (1)当δ=0,即AB 的B 端可看作铰接于C 点时,梁C 截面处的最大动位移 d1?= (4分); (2)当0≠δ,且杆B 端与梁C 端刚好接触时,环状物体重量P 0= (3分); (3)当0≠δ时,且P >P 0,梁C 截面处的最大动位移d1?= (6分)。 M C B 3 A D M a 2a/3 h δ
2017年全国大学生电子设计竞赛试题 设计报告 四旋翼自主飞行器探测跟踪系统(C题) 【本科组】 廖聪,吴雨航,张锦华 摘要:根据四旋翼飞行器飞行原理,首先根据设计方案采购了飞行器机体模型,选择合适的直流无刷电机作为系统动力装置,选取了功能强大且容易开发的微处理器、传感器和相关电子元器件,并做了大量的系统软硬件调试工作,最终完成了整体设计。根据系统动力学模型设计控制算法,设计控制系统控制规律,主要包括两个控制回路姿态控制回路、位置控制回路。在仿真软件平台上,进行控制算法验证及实验研究,优化飞行控制算法参数。最后,设计实时性高的控制系统软件程序,进行相关实验调试工作,最终设计出能够实现一键飞行探测跟踪的四旋翼自主飞行器。 关键词:ATMEGA2560 瑞萨R5F523T5ADFM MPU6000陀螺仪超声传感器
一、系统方案 根据设计任务的要求,本系统包括飞行控制模块、驱动模块、飞行导航模块、测距模块等。 1、飞行控制模块的选择 飞行控制模块是四旋翼自主飞行器的核心。按照题目要求,飞行控制模块由ATMEGA2560处理器的开发板专门实现飞行控制算法。 为了实现自主飞行探测跟踪,必须要形成控制的闭环回路,必须要有检测和反馈系统状态的传感器,包括四旋翼的姿态、经纬度、航向、高度、空速、角速率等信号。目前看来,国内外普遍应用MEMS器件来获取姿态、高度、空速、经纬度等信息。此外这中间还需要有A/D采样电路、信号调理电路对采集的电信号进行必要的转换和简单的滤波。 针对四旋翼飞行器,控制方法有PID控制、反步法、滑模控制等飞行控制算法,我们采用经典的PID控制算法。 2、驱动模块的选择 方案一:采用普通直流电机。普通直流电机有价格低廉、使用简单等优点,但其扭矩较小,可控性差,此系统要求控制精度高、速度快、且质量要小,所以直流电机一般不能满足要求。 方案二:采用无刷直流电机,其具有响应速度快、较大的启动转矩,从零转速至额定转速具备可提供定转矩的性能。因系统精度较高,足够精确控制飞机的速度。 综合以上方案,采用方案二。 3、飞行导航模块的选择 方案一:惯性导航系统能在世界任何地方,不依赖环境条件,但是,惯性导航不适合在小空间内精确制导。 方案二:GPS导航可以全球定位、被动定位,安全隐蔽,无限服务,可以同时为无限数量接收机提供定位信息。但是GPS导航不适合室内环境。 方案三:红外导航比较适合小车这种速度慢且接近地面的物体,不适合我们飞行器在高度一米以上的情况下的导航。 方案四:图像导航具有隐蔽性好、自主性强、测量快速、准确、以及廉价、可靠等优点。在飞机,无人飞行器、巡航导弹等得到广泛应用。
附件2: 2017年全国大学生电子设计竞赛进度安排 一、第一阶段(1月至5月),报名、征题工作 (1) 1月份召开2017年全国竞赛启动工作会议,并由全国竞赛组委会发出《关于组织2017年全国大学生电子设计竞赛的通知》。 (2) 3月份各赛区按《关于组织2017年全国大学生电子设计竞赛的通知》精神,完善赛区竞赛组委会和专家组。各赛区向本地区高校转发有关文件,制定赛区工作计划,组织指导本赛区各高校竞赛准备工作。 (3) 4月份召开全国竞赛专家组工作会议。 (4) 各赛区竞赛组委会根据《2017年全国大学生电子设计竞赛命题原则及要求》,广泛发动各高等学校、科研单位及有关企事业单位征集本届竞赛题目,并经赛区专家组初选之后,于5月31日前通过电子邮件报送全国竞赛组委会秘书处。 (5) 5月份召开全国专家组工作会议。 (6) 5月上旬各赛区将赛区竞赛组委会和专家组名单报全国竞赛组委会秘书处备案,赛区竞赛组委会及专家组名单请注明所有成员的单位、职称、邮编、办公电话、手机、电子信箱等,以方便联系。 (7) 5月份各赛区组织学生报名,并于5月31日前将本赛区《2017年全国大学生电子设计竞赛赛区报名汇总表》,报全国竞赛组委会秘书处备案。学生参赛名单以进入赛场时为准。 二、第二阶段(6月至9月),命题、竞赛、评审工作 (1) 6月份,召开全国专家组工作会议。 (2) 7月22日至23日,召开全国竞赛组织工作会议;部署竞赛事
宜,包括宣讲竞赛规则及竞赛期间有关注意事项。 (3) 7月27日至8月7日,召开全国竞赛专家组命题工作会议,编制并确定2017年全国竞赛题目,报全国竞赛组委会审批。同时,制定评分标准及有关评分原则、表格等。 (4) 8月2日,网上公布竞赛元器件及设备清单并可启封。 (5) 8月8日召开全国竞赛组委会会议,审批2017年竞赛题目。 (6) 8月9日(星期三)8:00至12日(星期六)20:00,举行2017年全国竞赛,开赛前半小时网上发题。 (7) 12日晚20:00竞赛结束后,全国竞赛组委会秘书处通过电子邮件向赛区专家组组长发放测试表。 (8) 8月13日至19日,各赛区组织评审工作。填写《2017年全国大学生电子设计竞赛赛区实际参赛队汇总表》,并于8月21日前报全国竞赛组委会秘书处备案。 (9) 8月21日前各赛区将参加全国评审的优秀参赛队的材料以快递方式寄出,以寄送时间为准,寄送地点将会在全国竞赛组织工作会议上确定;也可派专人报送全国竞赛组委会秘书处,并妥善集中保存本次竞赛优秀参赛队的全部制作实物及相关文字材料,以备全国竞赛组委会和专家组抽调检查。 (10) 未报送参加全国评审的参赛队材料,请各赛区妥善保存。 (11) 8月21日8:00至15:00各赛区进行综合测评,题目通过电子邮件发给各赛区竞赛专家组长,测评前发题,当日完成测评并封存测评记录。 (12) 8月22日各赛区将综合测评材料以快递方式寄出或派专人报送全国竞赛组委会秘书处。 (13) 8月25日至9月2日召开全国专家组评审工作会议。期间请
2017年全国大学生电子设计竞赛XXX控制系统(A/B/C题) 2017年8月12日
摘要 (小四、宋体,300字以内) 关键词:脉宽;脉冲;数显;电容(小四、宋体)
XXX控制系统(A/B/C题) 【本科组】 一、系统方案 本系统主要由单片机控制模块、XXX模块、XXX模块、电源模块组成,下面分别论证这几个模块的选择。 1、主控制器件的论证与选择 控制器选用 单片机比较 方案一:采用传统的51系列单片机。 XXXXXX. 方案二:采用以增强型80C51内核的STC系列单片机 XXXXXX 通过比较,我们选择方案二。 控制系统方案选择 方案一:采用在面包板上搭建简易单片机系统 在面包板上搭建单片机系统可以方便的对硬件做随时修改,也易于搭建,但是系统连线较多,不仅相互干扰,使电路杂乱无章,而且系统可靠性低,不适合本系统使用。
方案二:自制单片机印刷电路板 自制印刷电路实现较为困难,实现周期长,此外也会花费较多的时间,影响整体设计进程。不宜采用该方案。? 方案三:采用单片机最小系统。 单片机最小系统包含了显示、矩阵键盘、A/D、D/A等模块,能明显减少外围电路的设计,降低系统设计的难度,非常适合本系统的设计。 综合以上三种方案,选择方案三。 2、XXXX的论证与选择 方案一:XXX。XXXX 方案二:XXX。XXXX 方案三:XXX。XXXX 综合以上三种方案,选择方案三。 3、控制系统的论证与选择 方案一:XXX。XXXX 方案二:XXX。XXXX 综合考虑采用XXXXX。
二、系统理论分析与计算 1、XXXX的分析 (1)XXX XXXX (2)XXX XXXX (3)XXX XXXX 2、XXXX的计算 (1)XXX XXXX (2)XXX XXXX (3)XXX XXXX