
MULTICUES2D ARTICULATED POSE TRACKING USING PARTICLE FILTERING AND BELIEF PROPAGATION ON FACTOR GRAPHS
Philippe Noriega and Olivier Bernier
France Telecom R&D
2Av.Pierre Marzin22307Lannion Cedex France
ABSTRACT
This paper describes a method for articulated upper body track-ing in monocular scenes.The compatibility between model and the image is estimated using one particle?lter for each limb and the compatibility between limbs is represented by interaction potentials.The joint probability is obtained by belief propagation on a factor graph.The body model is a loose limbed model including attraction potentials between adjacent limbs and constraints to reject poses resulting in col-lisions.Robust compatibility functions based on face color, edges and motion energy are used to evaluate the likelihood of the generated hypotheses.Experimental results show the upper body tracking ef?ciency of the proposed algorithm.
Index Terms—Belief propagation,factor graphs,particle ?lter,tracking
1.INTRODUCTION
Algorithms for body tracking must cope with non linear and high dimensional space in which the joint probability function is highly multimodal and sharp.In this context,deterministic methods can track in real time with stereo cameras[1],but they may fail for monocular view because of many local op-timums due to ambiguities in monocular scenes[2].In this context,learning based methods imply huge data bases even if robust locally-weighted regression between candidate poses is used[3].To speed up the selection of a subset of learned nearest neighbors,the comparison process uses locally sensi-tive hashing and Hamming distance.Another approach con-sists in associating deterministic optimization and a learned base of poses[4].The comparison between a test image and the learned base aims to initialize the optimization process near the modes of the likelihood.Learning based methods may fail owing to the wide pose space and to external param-eters(clothing,hairstyle...).Stochastic algorithms are useful in monocular vision to resolve ambiguities resulting from2D to3D pose inference.In this case,a multi-hypothesis algo-rithm,such as particle?ltering[5],is attractive but the high dimension of the pose state complexi?es the solution.A key to this problem is to use a loose-limbed body model[6]where the likelihood of each limb can be evaluated independently.
In Fig.1.Multicues tracking using belief propagation and factor graphs.Left to right and top to bottom:initialization image for background subtraction,current frame,estimated pose,fu-sion of contour distance map and robust background subtrac-tion,motion energy distance map and face color map.
this manner,a particle?lter can be associated with each limb reducing the search space dimension to the number of dof of a limb[7].In?uence between limbs are taken into account by propagating limbs’likelihoods through a factor graph using belief propagation.A similar technique is used in monoc-ular scenes[8]with only motion energy as cues.Another approach uses edges and grey level with Mean Field Monte Carlo[9].In this paper,the number of cues is increased to enhance the robustness of the tracking.Particle?lters and belief propagation are used[7]to simplify the problem by computing the estimation in a discrete space instead of us-ing,for example,Gibbs sampler in a continuous one[6].This paper presents a monocular multicues tracking algorithm us-ing a loose-limbed body model and particle?lters interacting through belief propagation on a factor graph.
2.RECURSIVE BAYESIAN TRACKING FOR
ARTICULATED BODY
The upper body is modeled by a graph including M limbs represented by nodes and links corresponding to articulations or non collision constraints between limbs(see?gure2).Ba-sically,a Markov network can be used to represent this struc-ture but the non-collision constraints between the head and
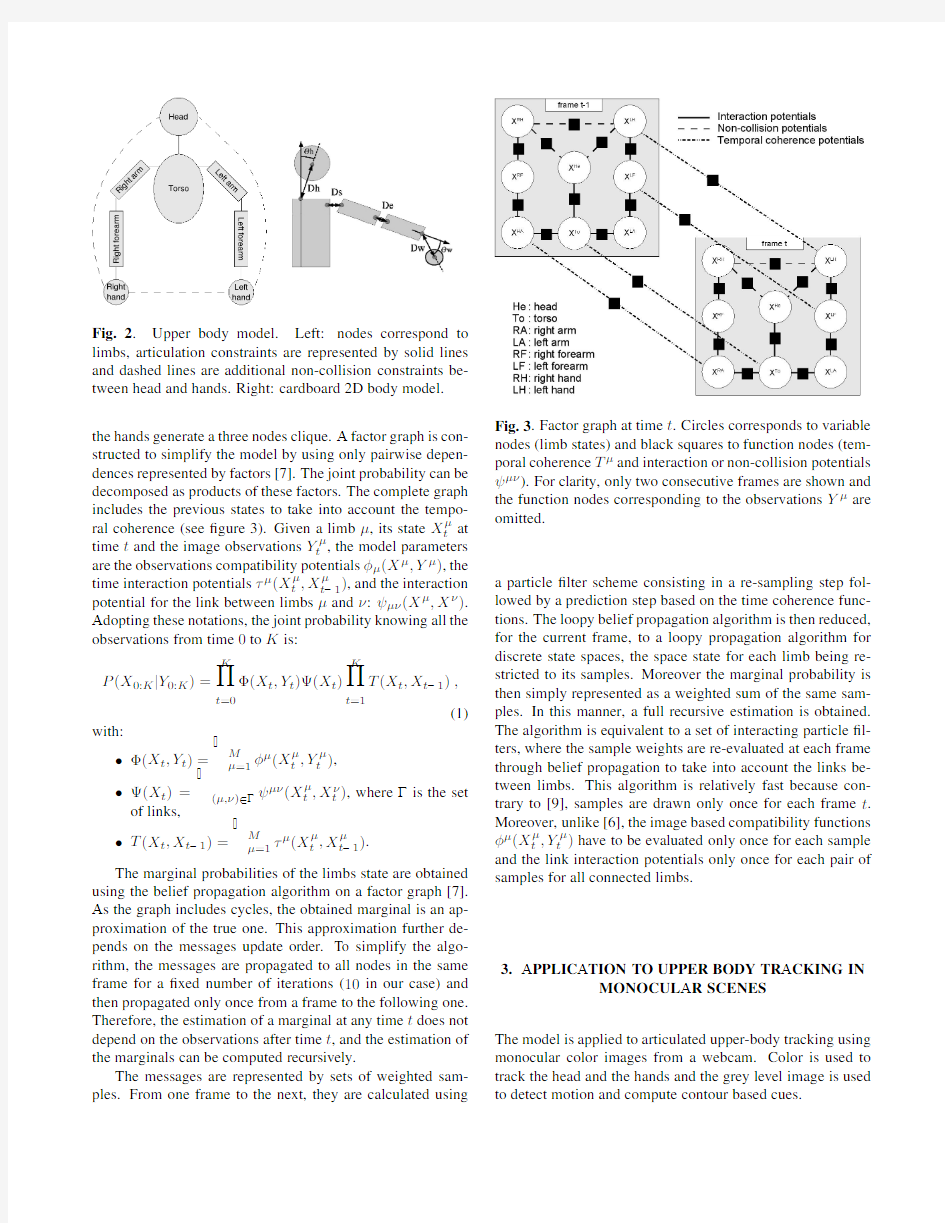
Fig.2.Upper body model.Left:nodes correspond to limbs,articulation constraints are represented by solid lines and dashed lines are additional non-collision constraints be-tween head and hands.Right:cardboard2D body model. the hands generate a three nodes clique.A factor graph is con-structed to simplify the model by using only pairwise depen-dences represented by factors[7].The joint probability can be decomposed as products of these factors.The complete graph includes the previous states to take into account the tempo-ral coherence(see?gure3).Given a limbμ,its state Xμt at time t and the image observations Yμt,the model parameters are the observations compatibility potentialsφμ(Xμ,Yμ),the time interaction potentialsτμ(Xμt,Xμt?1),and the interaction potential for the link between limbsμandν:ψμν(Xμ,Xν). Adopting these notations,the joint probability knowing all the observations from time0to K is:
P(X0:K|Y0:K)=
K
t=0
Φ(X t,Y t)Ψ(X t)
K
t=1
T(X t,X t?1),
(1)
with:
?Φ(X t,Y t)= M
μ=1
φμ(Xμt,Yμt),
?Ψ(X t)=
(μ,ν)∈Γ
ψμν(Xμt,Xνt),whereΓis the set
of links,
?T(X t,X t?1)= M
μ=1
τμ(Xμt,Xμt?1).
The marginal probabilities of the limbs state are obtained using the belief propagation algorithm on a factor graph[7]. As the graph includes cycles,the obtained marginal is an ap-proximation of the true one.This approximation further de-pends on the messages update order.To simplify the algo-rithm,the messages are propagated to all nodes in the same frame for a?xed number of iterations(10in our case)and then propagated only once from a frame to the following one. Therefore,the estimation of a marginal at any time t does not depend on the observations after time t,and the estimation of the marginals can be computed recursively.
The messages are represented by sets of weighted sam-ples.From one frame to the next,they are calculated
using Fig.3.Factor graph at time t.Circles corresponds to variable nodes(limb states)and black squares to function nodes(tem-poral coherence Tμand interaction or non-collision potentials ψμν).For clarity,only two consecutive frames are shown and the function nodes corresponding to the observations Yμare omitted.
a particle?lter scheme consisting in a re-sampling step fol-lowed by a prediction step based on the time coherence func-tions.The loopy belief propagation algorithm is then reduced, for the current frame,to a loopy propagation algorithm for discrete state spaces,the space state for each lim
b being re-stricted to its samples.Moreover the marginal probability is then simply represented as a weighted sum of the same sam-ples.In this manner,a full recursive estimation is obtained. The algorithm is equivalent to a set of interacting particle?l-ters,where the sample weights are re-evaluated at each frame through belief propagation to take into account the links be-tween limbs.This algorithm is relatively fast because con-trary to[9],samples are drawn only once for each frame t. Moreover,unlike[6],the image based compatibility functions φμ(Xμt,Yμt)have to be evaluated only once for each sample and the link interaction potentials only once for each pair of samples for all connected limbs.
3.APPLICATION TO UPPER BODY TRACKING IN
MONOCULAR SCENES
The model is applied to articulated upper-body tracking using monocular color images from a webcam.Color is used to track the head and the hands and the grey level image is used to detect motion and compute contour based cues.
3.1.Initialization
An accurate face detector [10]is used to detect the face in the color image.Once detected,the starting pose supposes that arms are along the body with the torso vertical and facing the camera.The tracker can easily recover the real pose as long as it is not too far from this hypothesis.The detected face is also used to initialize a face color histogram.
3.2.2D body model and Link interaction potentials The 2D body model is shown in ?gure 2right.Head and hands are represented by circles and rectangular patches are used for torso,arms and forearms.Limbs and limbs’edges are discretized using respectively a grid of points inside them and regularly distributed points around them.A Gaussian of the distance between two link points is used to compute the link interaction potentials (see ?gure 2for distances Dh,Ds,De,Dw).This Gaussian is zero centred for the shoulder-arm and arm-forearm joints,and on a reference distance for the head-torso and forearm-hand joints.Another constraint is added giving zero potential for angles θh ,θw (see ?gure 3)above a ?xed threshold.Three additional links are de?ned,which simply give a zero probability to solutions where hands and head intersect.
3.3.Time coherence function
The time coherence functions T μ(X μt ,X μ
t ?1)are simple Gaus-sians,independent for each parameter,centred on the value in the previous frame.For forearms and hands,which can move fast and rapidly change speed,the time coherence functions are a mixture of two similar Gaussians,one centred on the previous parameter and the other centred on the prediction of the current parameter using previous limb speed.The stan-dard deviation is chosen to be 10cm for hands positions,and 5cm for other positions.For angles,the standard deviation is set to π/8.
4.IMAGE FEATURES
The image compatibility functions φμ(X μ
t ,Y μt )are computed
from scores S μ
f representin
g the compatibility between a limb μand cues f extracted from an image.Contrary to stereo [7],monocular images needs more cues to reac
h a suf?cient level of robustness.Thus,multicues contour and color based terms are fused to provide a score:S μ
= f S μf .Considering the
highest score for all samples of the limb S
μ,the image com-patibility function is:φμ(X μt ,Y μt )=exp [?λ( S
μ?S μ)],with λa parameter that depends on the range of the values returned by each
cue.
Fig.4.Left to right and up to bottom,estimated error for the positions of torso,right shoulder,right elbow and right wrist.Elbow position computed using plain contour cue (dot line,mean =3.0cm )is less accurate than the one computed using the orientation contours §4.2(solid line mean =1.9cm ).4.1.Face and hands detection
Considering the head position detected during initialization step (§3.1),a color model is provided computing the UV his-togram of the head color from the Y UV color space.During tracking,the points belonging to the head and the hands are compared with this model to evaluate their color compatibil-ity.This score is completed with the Chamfer distance from contours provided by a Shen-Castan detector:the pixels cor-responding to the projection of the points belonging to the hands model and head edges are scored computing the Gaus-sian of this distance.To avoid taking into account background contours,a robust background subtraction [11]is applied be-fore contour detection.
4.2.Torso,arms and forearms detection
A more accurate contour based score can be estimated if the orientation of the contours are taken into account.A local squared area is de?ned on the center of a projected edge limb point.A pixel p belonging to an area Z e is weighted by the
contour magnitude ?→p and a Gaussian spatial kernel G e
centered on the limb edge point p e .For each pixel,the Gaus-sian difference between the limb and the contour orientation G θis computed:
S or = p e
p ∈Z e
M ( ?→p )G c [d (p,p e )]G θ[θlimb ?θp ],(2)
where d ()refers to the Euclidian distance and M ()is a func-tion that penalize low and high magnitude contours.
To avoid limbs getting stuck in a possible wrong static con?guration,a motion attraction term is added.A motion energy distance map is computed with the Chamfer distance from an adjacent frame difference.A motion energy score
Fig.5.Tracking results.Upper line:original frame,bottom computed front pose.In sequence 1,frame 3is an initialization image.Frame 65in sequence 2shows a wrong right elbow position due to the position of the right arm in front of the torso of the same color.The last image shows a correct result even when the body is out of image plan rotation.S mo is computed summing the energy distance εmo of each pixel p i corresponding to the projection of the points inside a
limb.If ?p i =d (p t ?1i ,p t
i ):S mo =
p i
[1?G mo (?p i )]εmo (p i )+
G mo (?p i )
εmo (p i )+0.1
(3)
The Gaussian kernel G mo models the link between the inter-frame energy motion and the limb displacement.
5.EXPERIMENTAL RESULTS AND CONCLUSION The system was tested on sequences grabbed with a web-cam.Quantitative results (see ?gure 4)were obtained for a sequence comparing the estimated pose with a ground truth provided by a magnetic motion captor.This sequence shows a person executing gestures in front of the camera (see ?g-ure 5,frames 3,70and 250).For the torso and the shoulder position,the error stays below 5cm and 10cm for the el-bow.Results are less accurate for the wrist because the hand model is too coarse.In some cases,for example when the wrist goes out of the sleeve shirt,the hand model,a rigid cir-cle (see §3.2),does not correspond to the hand shape and the estimated hand position moves along the wrist.The pinhole camera model used to convert 3D points to pixels coordinates is very coarse and can explain part of the obtained errors.In frame 250,another person enters the scene.The system is not distracted in spite of numerous false positives on image cues (?gure 1).The edge orientation cue (§4.2)provides a mean error for the test scene of 1.9cm instead of 3.0cm,the mean error resulting from plain edges cue.
The second tested sequence (see ?gure 5,frames 22,36,47,65and 94)shows challenging poses with rapid motion.In frame 65,the right arm is positioned in front of the torso of the same color and it does not produce enough cues to ?nd the correct position.
The algorithm speed is around 3fps on a bi-processor 3.4GHz.Real-time can be reasonably reached using threads in the source code.Projected future works will include a more accurate 3D model to track the body in 3D including a learn-ing base for occluded poses.
6.REFERENCES
[1]D.Demirdjian,T.Ko,and T.Darrell,“Constraining hu-man body tracking,”in ICCV .2003,pp.1071–1079,
IEEE Computer Society.[2]C.Sminchisescu and A.Telea,“Human pose estimation
from silhouettes -a consistent approach using distance level sets,”in WSCG ,2002,pp.413–420.[3]G Shakhnarovich,P.Viola,and T.Darrell,“Fast pose
estimation with parameter-sensitive hashing,”in ICCV .2003,pp.750–757,IEEE Computer Society.[4]D.Demirdjian,L.Taycher,G.Shakhnarovich,K.Grau-man,and T.Darrell,“Avoiding the ”streetlight effect”:Tracking by exploring likelihood modes,”in ICCV ,2005,pp.357–364.[5]M.Isard and A.Blake,“Condensation –conditional
density propagation for visual tracking,”IJCV ,vol.29,pp.5–28,1998.[6]L.Sigal,S.Bhatia,S.Roth,M.J.Black,and M.Isard,
“Tracking loose-limbed people,”in CVPR ,2004,vol.1.[7]O.Bernier and P.Cheung-Mon-Chang,“Real-time 3d
articulated pose tracking using particle ?ltering and be-lief propagation on factor graphs,”in BMVC ,2006,vol.01,pp.27–36.[8]J.Gao and J.Shi,“Multiple frame motion inference
using belief propagation,”in FGR ,2004,pp.875–882.[9]Y .Wu,G.Hua,and T.Yu,“Tracking articulated body
by dynamic markov network,”in ICCV ,2003,pp.1094–1101.[10]R.F′e raud,O.Bernier,J.E.Viallet,and M.Collobert,
“A fast and accurate face detector based on neural net-works,”PAMI ,vol.23(1),pp.42–53,2001.[11]P.Noriega and O.Bernier,“Real time illumination in-variant background subtraction using local kernel his-tograms,”in BMVC ,2006,vol.3,pp.979–988.
一、开始部分 10’ 1、学生按照要求排队,师生问好。 2、体育老师点名,检查上课出勤情况。 3、宣布本课的学习内容、目标和要求,安排见习生。 X X X X X 0 O O O O X X X X X 0 O O O O △ 二、准备部分 20’ 1、教师自我介绍 学生与教师相互介绍情况。 2、为学生安排体育课的队形。 根据学生身高和特点安排队形。 3、准备活动,徒手操(4×8拍) A 头部运动 B 肩部运动 C 扩胸运动 D 体转运动 E 腹背运动 F 全身运动 G 原地高抬腿跑 H 手腕关节运动 要求:活动充分。 三、基本部分 50’ 排球 排球比赛是由两队各6名队员在被网隔开的排球场内,根据规则规定,以身体的任何部位将球击入对方场区,而不使其落入本方场区的集体的、攻防对抗的体育项目。 1、首先讲解排球选项课学习的基本理论、基本技术、 2、讲解排球选项课的期末考试内容,以供学生积极训练,积极准备。 3、讲解排球技术的基本概念: 排球技术是指在排球规则允许的条件下,运动员采用的各种合理的击球动作和为完成击球动作所必不可少的与其他配合动作的总称。 4、讲解排球技术的基本组成动作: 排球的技术主要包括:准备姿势与移动、垫球、传球、发球、扣球、拦网。 5、讲解排球运动的概念:
排球运动是由参加运动的人,以身体的任何部位(以单手或双手为主)相互在空中击球,使球不落地,既可隔网进行比赛,也可不设球网进行击球游戏的一种体育运动项目。 排球球性练习: 1、6个人一个小组,每个小组一个排球,站成一个圆圈,熟悉球性练习。 2、每人自垫球5个,然后换人。 3、在圆圈内对垫球,在圆圈内对传球。 4、不要求排球动作的正确性,只要求熟悉球性。 四、结束部分 10’ 1、点名整队。 2、小结,收拾体育器材。 3、放松操。 4、师生告别。
排球垫球的动作要领 垫球是排球基本技术之一。是接发球、接扣球以及后排防守的主要技术动作,是组织反攻战术的基础。垫球技术的熟练程度和运用能力,是争取胜利的重要条件。有下面双手垫球、体侧垫球、正面低姿势垫球、背垫球、单手垫球、前扑垫球、鱼跃垫球、侧卧垫球、滚翻垫球、挡球和救入网球等。其中正面双手垫球是各种垫球技术的基础,适合接速度快、弧度平、力量大、落点低的各种来球,在排球比赛中运用较多。 垫球 垫球是用小臂从球的下部,利用来球的反弹力向上击球的技术动作.它在比赛中运用于接发球,接扣球,接拦回球,有时也用来处理球.是排球基本技术之一. (一)垫球技术要领 1,正面双手垫球 正面对正来球方向,两脚开立稍宽于肩,脚跟微起,两膝弯曲稍内收的准备姿势.两手手指重叠后合掌互握,掌跟靠拢.两拇指平行朝前,手臂伸直,手腕下压,两臂外翻,前臂形成一个击球平面。击球点在腹前约一臂距离,用前臂腕关节以上10厘米左右,桡骨内侧平面触球。击球时,手臂插入球下,蹬腿抬臂,身体重心向前上方移动。同时含胸,压腕,顶肘等动作协调配合,身体和两臂要有自然的随球伴送动作,以便控制球的落点和方向. 2,体侧双手垫球 当球向左侧飞来,右前脚掌内侧蹬地,左脚向左跨出一步,左膝弯曲,重心随即移至左脚上,两臂夹紧向左伸出,右肩稍向下 倾斜,用向右转腰和提左肩的动作,使两臂击球面截住球的飞行路线,垫击球的后下部。 3,背垫球 判断好球的飞行方向,迅速移动到球的落点处,背对击球方向,两臂夹紧伸直,击球手形与正面垫球相同,击球点要高于肩部。击球用力是通过抬头挺胸,展腹后仰,带动手臂向后上方抬送而实现的.在背垫低球时,也可以屈肘,翘手腕动作,以虎口处将球向后上方垫起. 4,单手垫球 单手垫球多在无法用双手垫球的情况下采用.体侧单手垫球方法是一脚迅速向侧前方跨出一大步,重心移至跨出的腿上,以跨出腿的同侧臂迅速伸出,用虎口或小臂击球的后下部。在体前可用手背平面击球,手臂要伸直,有抬击动作. (二)垫球技术练习方法 1,在简单条件下掌握垫球技术 (1)原地做徒手模仿垫球动作练习. (2)垫固定球.两人一组,一人持球于腹前,另一人用 垫球动作击球,体会垫球部位和用力动作.要求蹬腿抬臂协调用力. (3)自垫球.一人一球连续向上自垫,垫球高度可固定,也可高,低结合. (4)抛垫球.两人一球相距4~5米,一人将球抛至同伴的腹前,同伴将球垫回. (5)移动垫球.两人一组,一人抛出不同距离,方向,速度和高度的球,另一人在移动中采取正面,侧面,跨步,低姿或背向等法将球垫回. (6)对垫球.两人相距4~5米,做连续对垫球练习,尽量采用正面垫球. (7)对墙连续垫球.要求手臂角度固定,全身协调用力. (8)转换方向垫球.三人一组,三角连续垫球.可任意或按顺时针,逆时针的方向依次
《排球——正面垫球》教学设计 银川市第十五中学刘建华 一、指导思想 本课依据《体育课程标准》的理念,以“健康第一”为指导思想,以学生发展为中心,突出体现学生学练的主体地位,不断激发学生的学习兴趣,提高学生学练的基本技术和技能。本节课就是要体现体育运动本质就是游戏活动这一认识,游戏贯穿课的首尾,游戏活动替代热身准备和整理放松活动。本节课教学的主旨是:教师努力成为一位体验课堂活动的“学生”,而学生成为课堂的“驱动器”和“发动机”。教师不但要充分参与到各种互动活动之中,要同学生一起学练和游戏,而且要在潜移默化中让学生在知、情、意、行方面有所体会和收获。 教学过程遵循由易到难,由浅到深,层层递进的教学原则,教学内容和手段的安排要具有目的性和针对性。教学中教师要注重启发学生自学、自练、合作和探究学习;注重发展学生的合作意识和社会适应能力;逐步让学生形成积极的学习态度。 二、教学内容 排球:双手正面垫球 三、学情分析 1.教学内容分析 通过总结以往教学,可以看出排球是学生普遍喜欢运动内容,特别是围圈垫球和场地练习是学生最喜欢练习形式。学生喜欢打排球,这给排球基本技术教学提供了契机。如何通过排球基本技术的教学,使学生打排球的兴趣、爱好和行动最大化是教学中首要设计和考虑的。 2.学生情况分析 (1)对于八年级初学的学生来说,排球又重又硬,球打在手臂上很疼,而且出现红肿的情况,特别是女学生在练习中因为怕疼,而畏缩或不愿意练习的情况比较普遍。 一是教师要主动的引导和教育学生,把注意力放在学习上,教师要帮助学生,让学生在练习中有所提高和进步;同时教师要鼓励学生不怕困难,培养学生要有吃苦精神。二是教师要帮助学生快速进步,让学生体会到付出带来的快乐,尤其是一对一对垫时,教师要多多鼓励和表扬学生,激发他们练习的热情。 (2)学生“愿意”不受约束的“野玩”排球,但是在学习排球技术动作时
一、开始部分10’ 1、学生按照要求排队,师生问好。 2、体育老师点名,检查上课出勤情况。 3、宣布本课的学习内容、目标和要求,安排见习生。 X X X X X 0 O O O O X X X X X 0 O O O O △ … 二、准备部分20’ 1、教师自我介绍 学生与教师相互介绍情况。 2、为学生安排体育课的队形。 根据学生身高和特点安排队形。 3、准备活动,徒手操(4×8拍) A 头部运动 B 肩部运动 C 扩胸运动 D 体转运动 E 腹背运动 F 全身运动 % G 原地高抬腿跑H 手腕关节运动 要求:活动充分。 三、基本部分50’ 排球 排球比赛是由两队各6名队员在被网隔开的排球场内,根据规则规定,以身体的任何部位将球击入对方场区,而不使其落入本方场区的集体的、攻防对抗的体育项目。
1、首先讲解排球选项课学习的基本理论、基本技术、 2、讲解排球选项课的期末考试内容,以供学生积极训练,积极准备。 . 3、讲解排球技术的基本概念: 排球技术是指在排球规则允许的条件下,运动员采用的各种合理的击球动作和为完成击球动作所必不可少的与其他配合动作的总称。 4、讲解排球技术的基本组成动作: 排球的技术主要包括:准备姿势与移动、垫球、传球、发球、扣球、拦网。5、讲解排球运动的概念: 排球运动是由参加运动的人,以身体的任何部位(以单手或双手为主)相互在空中击球,使球不落地,既可隔网进行比赛,也可不设球网进行击球游戏的一种体育运动项目。 排球球性练习: 1、6个人一个小组,每个小组一个排球,站成一个圆圈,熟悉球性练习。 . 2、每人自垫球5个,然后换人。 3、在圆圈内对垫球,在圆圈内对传球。 4、不要求排球动作的正确性,只要求熟悉球性。 四、结束部分10’ 1、点名整队。 2、小结,收拾体育器材。 3、放松操。 4、师生告别。
蒲城中考体育排球垫球技术讲解 一.垫排球定义:垫球是排球运动的基本技术之一,是利用手臂从球的下部向上击球的技术动作。 二.垫排球正确动作讲解事项: 垫球手型:一般有三种。 一为抱拳式:双手抱拳互握,两拇指平行向前; 二为叠掌式:两手掌根紧靠,两手手指重叠后合掌互握,两拇指平行, 三为互靠式:两手腕部紧靠,两手自然放松。 无论什么手型,都应注意手腕下压,两臂外翻形成一个平面。 准备姿势:两腿前后开立,左右脚间距离与肩同宽,两手自然持球. 向上抛球:抛球出手时,尽可能使球向自己的正上方行进.与此同时,把要击球的手上动作做好,准备击球 准备击球姿势:中心降低,双腿微屈,与此同时,把要击球的手上动作做好,准备击球 击球动作::重心抬高,两臂夹紧伸直,两脚向正上方蹬地并抬臂,同时压腕顶肘. 三.分解动作,单个动作讲解.: 准备击球姿势:
1.手臂动作:将球抛出之后,两手迅速做出垫球手型,且两臂夹紧伸直, 2.双腿屈膝:将球抛出之后,身体重心迅速降低,同时把手臂动作做好. 辅助动作练习:空手做准备击球姿势 击球动作: 1.击球部位:正面双手垫球的击球点一般应保持在腹前一臂远距离,用小臂前半部腕关节以上左右挠骨内侧平面去击球。垫击部位过高或过低,不便垫准和垫稳,并且还容易造成“持球”“连击”犯规或垫球失误等。同时,击球点保持在腹前,便于控制手臂与地面的角度;便于观察来球;便于运用身体的协调力量,可以提高垫球的准确性。对墙练习击球 2.击球动作:重心抬高,两臂夹紧伸直,两脚向正上方蹬地并抬臂,同时压腕顶肘. 空手练习击球动作 击球时用力::垫球时根据落球力量、速度和垫击的距离,掌握好手臂迎击球的用力和缓冲作用。如落球速度慢或垫击球的距离较远时,垫击用力大些,必须加大抬臂击球动作,来增加球的反弹力;如落球速度快或垫击距离较近,垫击时,可用力小些,靠球的反弹力量将球垫起;如落球速度大,为了缓冲来球力量, 错误一:屈臂 屈臂是指在击球的瞬间,利用屈肘关节,抬前臂的力量来击球。
排球垫球的动作要领 的主要技术动作,是组织反攻战术的基础。垫球技术的熟练水准和使用水平,是争取胜利的重要条件。有下面双手垫球、体侧垫球、正面低姿势垫球、背垫球、单手垫球、前扑垫球、鱼跃垫球、侧卧垫球、滚翻垫球、挡球和救入网球等。其中正面双手垫球是各种垫球技术的基础,适合接速度快、弧度平、力量大、落点低的各种来球,在排球比赛中使用较多。 垫球 垫球是用小臂从球的下部,利用来球的反弹力向上击球的技术 动作.它在比赛中使用于接发球,接扣球, 接拦回球,有时也用来处 理球.是排球基本技术之一. (一)垫球技术要领 1,正面双手垫球 正面对正来球方向,两脚开立稍宽于肩,脚跟微起,两膝弯曲稍内 收的准备姿势.两手手指重叠后合掌互握,掌跟靠拢.两拇指平行 朝前,手臂伸直,手腕下压,两臂外翻,前臂形成一个击球平面。击球点在腹前约一臂距离,用前臂腕关节以上10 厘米左右,桡骨内侧 平面触球。击球时,手臂插入球下,蹬腿抬臂,身体重心向前上方移 动。同时含胸,压腕,顶肘等动作协调配合,身体和两臂要有自然的 随球伴送动作,以便控制球的落点和方向. 2,体侧双手垫球 当球向左侧飞来, 右前脚掌内侧蹬地,左脚向左跨出 ,左膝弯 曲,重心随即移至左脚上,两臂夹紧向左伸出,右肩稍向下
倾斜,用向右转腰和提左肩的动作,使两臂击球面截住球的飞行路线,垫击球的后下部。 3,背垫球 判断好球的飞行方向,迅速移动到球的落点处,背对击球方向,两 臂夹紧伸直,击球手形与正面垫球相同,击球点要高于肩部。击球 用力是通过抬头挺胸,展腹后仰,带动手臂向后上方抬送而实现的 在背垫低球时,也能够屈肘,翘手腕动作, 以虎口处将球向后上方 垫起. 4,单手垫球 单手垫球多在无法用双手垫球的情况下采用.体侧单手垫球方法 是一脚迅速向侧前方跨出一大步,重心移至跨出的腿上,以跨出腿 的同侧臂迅速伸出,用虎口或小臂击球的后下部。在体前可用手 背平面击球,手臂要伸直,有抬击动作. (二)垫球技术练习方法1,在简单条件下掌握垫球技术 (1)原地做徒手模仿垫球动作练习. (2)垫固定球.两人一组,一人持球于腹前,另一人用 垫球动作击球,体会垫球部位和用力动作.要求蹬腿抬臂协调用力. (3)自垫球.一人一球连续向上自垫,垫球高度可固定,也可高,低结合. (4)抛垫球?两人一球相距4?5米,一人将球抛至同伴的腹前,同伴将球垫回. (5)移动垫球.两人一组,一人抛出不同距离,方向,速度和高度的
排球正面双手垫球是指双手在腹前垫击来球的一种垫球方法,它是各种垫球技术中最基础最简单的技术。排球正面双手垫球适合于接发各种球、扣球、拦网球等,有时也能够垫传球,在困难的时候用来组织进攻。正面双手垫球的基本手形有:抱拳式、叠掌式和互靠式等。 排球正面双手垫球技术要领 一、动作要领: 准备姿势:正面对准球,两脚开立(左右、前后)稍宽于肩,脚尖内收或朝前,脚跟稍提起,两膝弯曲稍内扣,上体稍前倾,重心靠前,落于前脚掌, 两臂微屈置于肤前,两肘稍向内收,两眼注视来球。 二、垫击手型: 抱拳式:一手半握拳,另一手抱住握拳手,两拇指平行朝前。 叠掌式:两手手指上下相叠,掌根紧靠,合掌互握,两拇指朝前。 垫击球时两臂自然伸直,两掌跟和两小臂外旋紧靠,手腕下压,使腕关节 以上的前臂形成一个垫击的平面。 用腕关节以上10厘米左右,桡骨内侧平面触球的后中下部。 四、动作要点: 正面对准来球,两脚开立,两臂并靠并插入球下,在腰腹前约一臂距离的 位置上,用腕关节以上10厘米左右部位,触球的后中下部,并迅速蹬伸前移 重心。击球时,两臂伸直夹紧,提肩压腕、前送,靠上下肢的协调用力配合 来控制击球的力量和方向。 五、易犯错误纠正: 1.击球时机的掌握:学生在练习的过程中经常出现这种情况,对球的落点 判断不好,会出现击球过早或过晚这样那样的情况,对高球的处理尤其明显, 在这其中会出现击球“落空”的现象。 2.击球部位不准确:主要是手的部位不准确。触球时,应用前臂腕关节以 上10厘米左右的桡骨内侧平面接球。如触球部位过高,两臂间隙大而不好控 制球,触球部位过低,垫球腕部不易垫稳。 3.挥臂发力不协调:挥臂发力是指接球时,以肩关节为轴心,有下而上挥 双臂击球,垫球时应配合蹬地、跟腰动作,使重心向前上方移动,手臂应适
排球基本技术 一、排球的基本技术包括五项:发、垫、传、扣、拦 二、基本技术要领 1、发球(下手飘球) (1)准备动作:双脚自然开立站在端线后(左脚脚尖指向预计的排球出手后的飞行路线,右脚脚跟在左脚脚跟同一直线后约半步的位置上,右脚与左脚约成30°-45°),上身略前倾,身体中心线指向去球方向,目视预计的排球落点,左手略弯在身体左肩前方略下持球,右手伸直,略比右肩低一点,指向身体的右后方(以感觉自然顺手为准)。 (2)发球:左手将球向上抛出,待球落下后在合适的高度(即自己最自然顺手的高度)挥臂将球击打过网(以松握拳的虎口面击球)。 2、垫球 (1)预备动作:左右手自然弯曲,放在胸前两侧,上身略微前倾,两脚一前一后半蹲于场地上,后脚跟离地。 (2)来球时的动作:右手松握拳,放在左手上,两手自然合拢;两手臂自然伸直、夹紧,保持一定的紧张度,整个手臂抬起与身体约成90°(此角度尽量保持不变,即肩关节不转动),身体的中心线对向要去球的方向,以小臂的前三分之一触球(不可用握拳的部位垫
球),整个身体略下沉以缓冲来球,最后用脚蹬地的力量以整个身体将球“抬”起来――在整个垫球过程中手臂与身体的夹角应当尽量保持不变。 ▲注意事项: ①很多人垫球的习惯动作是将两手合拢后将手放置在腹部前方,以肩关节为中心向前“摆臂”将球“打”出去,这样的垫球动作太“硬”,对于来球缺乏缓冲,不能很好的控制球的去向,容易垫出界而且容易造成手臂部位的瘀血。因此,垫球前即必须将双手伸到自己的双眼下方(即垫球前一定要保证自己能够看到自己的双手),肩关节原则上是不能动的(可以“提肩”――即将整个手臂水平的“提”起来但不能“摆臂”),如上文所述一定要用自己的“整个身体将球‘抬’起来”。 ②有些人习惯于将双手“摆”到身体的侧面垫球,但是这样垫球一是动作慢,二是不能保证去球的方向,三是影响垫球后的下一个动作,因此在绝大多数情况下应该将双手放在身体的中心线上垫球(脚下移动一定要快,确保随时能将身体的中心线对正来球)。 ③单手垫球很容易将球垫“飞”,因此除非在紧急情况下不要用单手垫球。 ④垫球完毕后双手要有一个“跟随动作”――垫球出手后小臂以肘关节为轴心向上方转动,最终放置在面部两侧,同时目视排球飞行路线。
排球教案 课次:第1课学校; ***** 教师:*** 初二年级学生:(30)人 教学目标1、认知目标:了解垫球在排球运动中的作用,并能领会双手正面垫球技术要领。 2、技能目标:初步学会双手正面垫球技术,发展协调、灵敏力量等身体素质 3、情感目标:通过排球学习,培养学生的判断能力、应变能力,以及团结协助配合的集体主义精神。 学习 内容 学习双手正面垫球 重点难点重点:手臂伸直、夹紧、击球部位难点:协调用力,插、压、蹬、送 顺序时 间 学习目标教学内容教师活动学生活动 负 荷 准 备部分15 1、快、静、齐 队形整齐,使 学生精神饱 满。 动作准确有 力。 3、使学生充分 热身,预防运 动受伤。 一、上课: 1、集合、整队,报告人 数。 2、师生问好。 3、宣布本课教学内容和 目标。 检查服装,安排见习生。 二、慢跑热身 三、徒手体操 1、头部运动 2、扩胸运动 3、肩部运动 4、腰部运动 5、膝部运动 6、正压腿 7、侧压腿 8、踝腕运动 四、专门性活动 要求: 一、简洁、明确、语 气和蔼宣布教学内 容。 安排见习生。 二、徒手体操 1、口令指挥 2、动作示范 教师统一指挥 教师评价 集合队形: ★ ●●●●●● ●●●●●● ●●●●●● ●●●●●● ●●●●●● 成体操队形: ★ ●●●●●● ●●●●●● ●●●●●● ●●●●●● ●●●●●● 小
基本 部分22 1、课堂气氛活 跃,学生认真 学习新的内 容。 2、熟悉和掌握 双手正面垫球 的准备姿势, 大部分学生掌 握垫球的基本 动作。 3、初步了解双 手正面垫球在 排球运动中的 重要性,提高 学生的学习兴 趣。 学习双手正面垫球 动作要点: 1、腕关节以上10厘米处 击球。 2、半蹲准备姿势和身体 的快速移动。 3、击球时两手臂伸直夹 紧,提肩,前伸至球下。 4、上下肢协调用力。 游戏:垫球比赛 一、教学方式: 1、教师讲解、示范。 2、组织学生做徒手练 习。 3、检查学生身体姿 势。 4、组织学生定位击球 练习。 4、组织学生做垫球练 习。 5、检查指导学生练 习。 二、教学要求: 1、认真练习、互帮、 互学。 2、技术动作合理,协 调用力。 一、练习方法: 1、集体模仿练习3—4分钟。 要求:听口令指挥。 2、垫固定球。 要求:连续10次。 3、一抛一垫。(10次) 要求: 1、距离3到4米。 2、体会移动,击球时机。 3、落点控制好。 二、教学评价。 1、技术动作合理,协调用力, 落点控制好。 2、认真练习,体会动作 中 结 束部分5 一、整队集合。 二、放松练习。 三、总结上课 情况。 四、布置作业。 五、下课。 1、教师讲解、示范。 2、 带领学生做放松练习。3、 教师讲评。 体操队形。要求:1、 集体模仿练习。2、动 作放松。3、收器材。 要求:集体模仿练习。 强调动作放松。 消除疲劳 小 场地、器材排球场、排球若干预计平均心率:130-135% 预计练习密度:45%
打排球垫球教法_排球垫球动作要领 排球垫球练习方法介绍 垫球时上、下肢的口诀(上肢是一插、二夹、三提、四压;下肢是一蹬、二跟、三伴送)。 练习顺序。垫击手型的练习,徒手做击球动作,做这个练习时首先要让学生掌握垫击球的正确手型,其次让学生体会蹬地、抬臂协调用力的顺序。 垫击固定球。这个练习的主要目的是让学生掌握击球部位以及击球点的高度。 垫击手抛球,做这个练习时应尽量控制手抛球的高度、速度及落点,让学生在前两个练习的基础上,完整正确的做出垫击球的动作。对墙垫球,这种练习方法,是检验前三步练习效果的最佳办法,但这种练习法对初学者来说还是有一定的难度,在练习中应多对学生进行鼓励和表扬。以有效完成练习。 总而言之对于初学者来说,排球垫球易犯的错误无非就是:一、屈肘翘腕;二、垫击球时抬臂过大用力不柔和;三、垫击部位不合理,但本人通过十几年的排球教学经验看,只要严格遵循以上的教练方法,同时给学生一定的时间去学习,犯错误、改正错误这样经过反复的锤炼,学生一定能完全掌握排球垫球的基本动作并投身到这项难度适中、又无大运动量奔跑和相互碰撞的运动当中去。 垫球技术介绍 正面双手垫球、正面低姿垫球、跨步垫球、体侧垫球、侧倒垫球、背向垫球、滚翻垫球、前扑垫球、鱼跃垫球、单手垫球、单手和双手挡球等。垫球技术按运用分类时可分为接发球、接扣球、接拦回球、接其它球等。 垫球技术在50年代就出现了动作雏形,当时叫下手传球,是用手掌、虎口、手背、手腕关节部位来击球,但没有引起足够
的重视和被普遍采用。当时主要用来接大力扣球和大力发球。自60年代初,由于来球技术的问世与普及,用双手传球和虎口,手部垫球已不能适应于接来球。为了对付飘球,便出现了前臂垫球技术。采用前臂垫球技术,不但能适应接飘球、接扣球、接吊球等各种性能的来球,而且在很大程度上提高了垫球的准确性、稳定性和实用性。从而垫球技术被广泛采用。 随着排球规则的变化和技、战术水平的提高,垫球技术也日趋多样,不断完善与合理,无论是垫球动作还是击球手法都在不断发展。70年代单手垫球愈来愈被重视,并结合摔救垫球技术而普遍采用。80年代由于各项技术水平的不断提高,扣球攻击力的加大,各项快攻战术的发展运用,单纯依靠垫球技术来接球已非常困难,双手挡球技术在高水平的比赛中便不断出现,缕见不鲜。 进入80年代末90年代初,单手接球技术越来越被广泛运用。自从取消拦发球以后,以及攻强守弱的日益突出,钻研各项垫球技术已成为各队提高防守能力的当务之急。随着放宽垫击尺度,放宽垫击部位规则的实施,能否出现像足球那样的颠球技术,或者用脚及小腿部位踢挡球等新技术,在紧急时刻加以运用,这样就能扩大防守的面积,增加救起难险球的机会。随着全身任何部位都可以触球规则(1995年开始)的实施,脚踢排球必然成为新的垫击技术。脚踢排球也会像巴西的脚踢排球运动那样,像足球、藤球、毽球等技术那样,在不同的情况下要用不同的踢挡球动作,并且一定会日益完善,向着合理、实用的方向发展。 排球垫球技术规格 正面双手垫球是各种垫球技术的基础,适合接速度快、弧度平、力量大、落点低的各种来球。它是在准备姿势的基础上,判断来球的路线与落点,迅速移动取位,把来球保持在腹部的正前方,两臂插入球下并对准来球。垫球时,利用蹬腿移体,腰腹发力和提肩抬臂的协调动作,以两前臂所组成的平面击球的后下方,同时身体重心伴随击球动作前移,将球向前上方垫出。 准备姿势准备姿势分半蹲和深蹲两种。半蹲主要用于接轻球及中等力量的来球;而深蹲则用于垫重球。比赛中应根据不同
体教1101班纪春阳 欧阳家百(2021.03.07) 排球双手垫球动作要领: 双手下手垫球动作要领:半蹲姿势,正面对着来球方向,当球临近时,两手相抱成垫球手型,垫球技术按连贯动作的顺序一般可概括为“一插、二夹、三抬臂”。“插”,就是用垫球手型和双臂插到球下,下插的程度应能保证以小臂的前半部击球为宜。插臂的角应要根据来球的弧度作相应的变化。“夹”,就是夹臂。完成夹臂动作要自然,并配合有提肩、含胸、压腕及挺肘等动作。“抬臂”,就是用蹬地、压腕、挺肘、抬臂等动作协调地将球有控制,有目的地垫出。 正面双手垫球是各种垫球技术的基础,适合接速度快、弧度平、力量大、落点低的各种来球。它是在准备姿势的基础上,判断来球的路线与落点,迅速移动取位,把来球保持在腹部的正前方,两臂插入球下并对准来球。垫球时,利用蹬腿移体和提肩抬臂的协调动作,以两前臂所组成的平面击球的后下方,同时身体重心伴随击球动作前移,将球向前上方垫出。 1、准备姿势 准备姿势分半蹲和深蹲两种。半蹲主要用于接轻球及中等力量的来球;而深蹲则用于垫重球。比赛中应根据不同情况采用相应的准备姿势。初学垫球时,由于是垫一般的轻球,故可采用半
蹲准备姿势。做准备姿势时应正面对准来球方向,两脚前后开立,两脚距离稍宽于肩,后脚跟提起,前脚掌着地,两脚和两膝内收,膝部垂直面应超出脚尖。上体前倾,重心降低,并置于前脚掌的拇指根部,两肩的垂直面超出膝部。两臂微屈内靠,两臂自然下垂,两手置于腹前。两眼注视来球,两脚要保持“静中待动”的状态,随时准备移动。 2、击球手型 目前常用的击球手型有两种。一种是叠指法,两手手指上下重叠,掌根紧靠,合掌互握,两拇指朝前相对平行靠压在上面一手的中指第二指节上。两臂伸直夹紧,注意手掌部分不能相叠。另一种是包拳法,两手抱拳互握,两拇指平行朝前,两掌根和两前臂外旋紧靠,手腕下压,使前臂形成一个垫击平面。 3、击球点、击球部位 正面双手垫球的击球点一般应尽量保持在腰腹前的一臂距离,有两小臂腕关节以上10厘米左右桡骨内侧平面击球为宜。击球部位过高,既不便于控制球,而且易造成“持球”或“连击”犯规;击球部位过低,垫在虎口上,球易不稳,对球的方向、力量控制不准。 4、击球动作 在判断来球移动取位的同时,应根据来球情况和击球的需要变化身体重心,使击球点保持在腹部高度的正前方,并将两臂迅
排球正面双手垫球技术教 案 正面双手垫球技术 一、指导思想: 本课以体现课程改革新思想,转变教育教学方法和观念,发展学生身体素质和发展快乐体育为重点,以学生的兴趣爱好为切入点,以团结友爱、积极拼搏为德育渗透点,使学生养成良好的锻炼习惯,为学生终身体育打下坚实的基础。同时发展学生速度,灵敏,耐力,柔韧等身体素质;对于提高身体机能。培养勇于竞争,顽强拼搏,积极进取团结合作等精神。 二、教材分析: 排球运动具有集体性、竞争性强、趣味性浓等特点。通过排球运动,可以发展学生跑、跳等基本活动能力,提高灵敏、速度、力量、耐力等身体素质和动作的准确性、协调性。是一项有很高锻炼价值的运动项目。 本课教学内容是排球运动的垫球技术,垫球技术是排球运动中最主要的基本技术,是接发球和防守的最常用的主要技术。起着组织全队相互配合的重要桥梁作用,是排球教学重要组成部分,是更好地学习各种技术和战术的基础,防守也是进攻的开始,垫球技术好坏直接影响到集体力量的发挥和战术的配合的质量。 三、学情分析: 1、有利因素:学生有较强的模仿能力和创造潜能,对排球这项体育运动有着较高的兴趣,在日常生活中,部分学生已获得了一些排球的基础知识因此有利于学生进行自主性、创造性的学习。 2、不利因素:对于初学者具有一定的难度,特别是学生处在发育成长阶段,心理因素处于不稳定阶段,自我控制的能力不够,会造成运动损伤,个别女生想练而不敢,见球就躲,表现出对排球运动的恐惧心理。 3、主要困难:对于初学者,击球点不准确,判断力差,身体协调能力不够,在学习中会精力分散,精神不集中,因此在教学中充分
运用各种有趣的教学形式与手段,来提高学生的求知欲望与兴趣,在教学中应面向全体,而又注重学生的个体差异的不同需求。 四、教学过程:(见下页) 排球正面双手垫球教案 授课班级:高一(3)班授课教师:邢群利上课人数:24人
水平四《排球正面双手垫球》教学设计 南京市紫东实验学校王琴 一、设计指导思想: 本课是根据七年级教学大纲的要求,以“健康第一”为指导思想,全面锻炼学生身体,促进学生身心和谐发展。本课在教学中,以学生为主体,“学生主动学、自主学,教师点拔、辅导”的探究式学习方式,留给学生一定的时间与空间,培养他们的自主学习习惯。努力以“健康第一”为宗旨,贯彻以教师为主导,学生为主体这一原则,采用小组合作学习方式,通过教师的引导和恰当的比喻,让学生在练习中互相交流,互相探讨,最终达到提高技术动作的目的。通过“自由创练”激发学生的创新精神,这样不仅营造出课堂气氛,启发了学生的思维,而且使学生在轻松、民主的气氛下获得知识,掌握技能,发展思维,培养互相协作的精神,身心得到全面的锻炼。 二、教学内容: 1、排球:学习正面双手垫球 2、排球接力游戏 三、教学目标: 1、运动参与目标:使学生具有积极参与体育活动的态度和行为,着重培养学生体验参加体育活动的乐趣,提高健康水平,形成乐观开朗的生活态度,奠定终身体育锻炼基础。 2、运动技能目标:使学生获得运运基础知识,发展体能,提高学生对体育课的兴趣,较熟练地掌握排球双手正面垫球的动作技能。通过初步练习提高运动水平。 3、身体健康目标:提高学生的身体素质,了解体育活动对心理健康的作用,认识身、心发展的关系,以及与他人合作共同完成体育活动的协作意识。四、学情分析: 本课的教学对象是七年级学生,他们还带着小学生的稚气。好动是他们的天性,他们对体育活动有广泛的兴趣,特别是球类。他们很喜欢学习别人的运动技巧,自信心强,对动作技术的掌握日趋完善,渴望自己拥有正确的、完美的技术,但往往又具有一种不顺从性,或者有时过高估计自已的能力,不愿屈服于教师一板一眼的“看教师示范——听教师讲解——模仿教师徒手练习——持球练习”的传统教法,同时,他们的团队意识逐渐加深,很注意老师和同学们对自己的态度。因此,在教学中针对学生的心理、生理特点,灵活安排多样的练习,在课堂上为学生创设公平竞争的气氛,留给学生一定的活动天地,让
气排球基本技术动作要领 一、半蹲准备姿势 两脚左右开立稍比肩宽,两脚尖稍内收,两膝弯曲成半蹲。脚跟稍提起,身体重心稍靠前,两臂放松,自然弯曲,双手置于腹前。两眼注视来球,两脚始终保持微动放松。 二、移动移动的步伐分起动、跨步、滑步(并步)、交叉步、跑步、后退步等。 1、起动起动是指移动脚步和身体的最开始的那一瞬间态势。起动的快慢取决于重心的移动和蹬地的爆发力,以及前两三步步幅与频率。 2、跨步跨步是指跨出比肩宽稍大的步幅的移动,跨步取决于对来球的方向与速度的判断。 3、滑步(并步)滑步是保持屈膝低重心随来球移动的方法,分左、右滑步和前、后滑步。移动中,两臂自然张开,身体上下平稳(不起伏)。 4、交叉步交叉步是指两腿向左右前后交错移动的方法,一个交叉步幅比一个跨步步幅大。 5、跑步跑步是指来球运行路线离身体距离比较远必须以加速度跑步在球落地前接住球或把球打入对方场地的步法。 6、后退步后退步是指双腿用前后交错的步法接住高于身体球或者即将落入身后的球。 三、传球 1、半蹲准备姿势两脚左右开立稍比肩宽,两脚尖稍内收,两膝弯曲成半蹲。脚跟稍提起,身体重心稍靠前,两臂放松,自然弯曲,双手置于腹前。两眼注视来球,两脚始终保持微动放松。 2、垫球垫球技术动作要点可用“插、夹、抬、压”四个字概括。 插——双手互握插入球下。 夹——两臂夹紧伸直。 抬——提肩抬臂。 压——手腕下压。 击球时,用手腕上10厘米的前臂击球的后中下部。
3、正面下手发球 准备姿势:面对球网,两脚前后开立,左脚在前,两膝微曲,上体前倾,重心偏后脚,左手持球于腹前,右臂自然下垂。 引臂:击球的同侧手臂直臂向后摆动。 抛球:左手将球平稳地向上托送竖直抛起,抛球高度为30厘米左右。 挥臂击球:右腿蹬地,身体重心随着右臂的直臂前摆而前移,在腹前用掌的坚硬部位击球的后下部。重心随击球动作前移,迅速进场比赛。 4、正面上手传球 准备姿势:看清来球,迅速移动倒球的落点,对正来球,两脚左右开立,约同肩宽,左脚稍前,右脚脚跟稍提起,两膝微屈,上体稍前倾,两臂弯曲置于胸前,两肘自然下垂,两手成传球手形,眼睛注视来球方向。 手型:当手触球时,手腕稍后仰,两手自然张开,手指微屈成半球状。两拇指相对成“一”字形或“八”字形,两拇指间的距离不能过大,以防漏球。 击球点:击球点在前额上方约一球左右。 球触手的部位:拇指外侧,食指全部,中指的二三指节,无名指第三指节和小指第三指节的半个指节。简称为“3、2、1、半和拇指外侧”。 击球部位:后中下部 用力顺序:蹬腿、展腹、伸臂最后用手指手腕的弹力将球向前上方传出。 5、正面上手大力发球 准备姿势:面对球网站立,两脚自然开立,左脚在前,左手持球于体前。 抛球:左手将球平稳的垂直抛于右肩的前上方,抛球高度为1.5米左右。 引臂:屈肘后引,上体稍向右转,手停于耳旁。 挥臂击球:收腹、振胸、挂肘,上臂带动前臂向前上方弧形挥摆,伸直手臂,在肩的上方用全掌击球的后中部。 击球手法:包满打转,边包裹边推压;全手掌击球,使球呈上旋飞行。 6、一般二传的动作要点与要求 动作要点:采用变向传球的方法进行传球,先转体(面向出球方向)让球(使球到达转体后的前额前上方),然后进行正面传球。 传出球的基本要求: 高度——高于球网上沿2米左右。 远度——球的落点最远不超过边线,最近不近于离边线2米。 离球网距离——最近不小于一球,最远不超过1米。 7、扣球 准备姿势:两脚自然开立,两膝微屈,上体稍前倾,观察二传来球。 助跑:左脚先向前迈出一步,接着右脚迅速跨出一大步,左脚及时并上落在右脚侧前方,两脚尖稍向右准备起跳。
排球垫球基本动作及纠正方法 整理:马晓燕 垫球的特点与作用 垫球的特点: 1、动作简单易学,便于初学者掌握 2、便于接离身体远、速度快、弧度低的球 3、垫球的准确性不及双手传球高 垫球的作用 垫球在比赛中主要用于接发球、接扣球、接拦回球以及防守和处理各种困难球。垫球的种类:正面双手垫球、背垫球、防守垫球、体侧垫球、单手垫球。 正面双手垫球的动作规格与要领 垫球的准备姿势 比赛中应根据不同情况采用相应的准备姿势。初学垫球时,由于是垫击一般的轻球,故可采取一般准备姿势。上体稍前倾,两脚开立,两脚间的距离稍宽于肩,两臂微屈置于腹前,两肘稍内收,两眼注视来球。 击球手型、击球点和击球部位 垫击手型目前常用的方法有两种 叠指法两手手指上下相叠,两拇指对齐平行相靠压在上面一手的中指第二指节上,掌根紧靠,两臂伸直相夹。注意手掌部分不能相叠。 包拳法两手抱拳互握,两拇指平行放于上面,两掌根和两小臂外旋紧靠,手腕下压,使前臂形成一个垫击平面 击球点、击球部位 正面双手垫球的击球点,一般应尽量保持在腹前约一臂距离的位置。用腕上10 厘米左右的两小臂挠骨内侧所构成平面击球 垫球的动作要领 插及时移动取位,降低重心,两臂前伸插至球下,使两前臂的垫击面对准来球,并初步取好手臂的角度。 夹是指两手掌根紧靠,手臂夹紧,手腕下压,用平整而稳定的击球面去迎击球。
提由下肢蹬地,提肩、顶肘、压腕的动作去迎击来球,身体重心要随球前移,两臂在全身协调动作的配合下伴送球。 体侧双手垫球 动作方法 左侧垫球时,应先以右脚前脚掌内侧蹬地,左脚向左跨出一步,身体重心随即移至左脚,并保持两膝弯屈。与此同时,两臂向左侧伸出、左臂高于右臂,右肩微向下倾斜,两臂组成的击球面对准来球并拦击来球。击球时,以腰部发力,并借助左脚蹬地的力量,使身体重心微向内转,同时提肩抬臂将球垫起 背向垫球 动作方法: 在决定采用背垫时,首先要判断来球的落点和离网的距离,迅速移动取位,背对垫出球的方向。垫球时,两臂夹紧伸直,利用蹬地、抬头、挺胸及上体后仰的动作带动两臂向后上方迎击球。击球时要抬臂压腕触球的前下方,将球向后上方击出。背垫的击球点,一般要比正面垫球高。 教学步骤与方法: 1、讲解示范 2、练习顺序 3、模仿试作 垫球手型的练习集体原地试作,教师进行检查纠正。注意垫球动作要合理;小臂要夹紧;手臂要伸直;垫击面要平整。 徒手试作原地徒手模仿完整的垫球动作,要做得正确、协调。 垫击固定球 两人一组,一人持球固定在小腹前高度,另一人从准备姿势开始,做垫击动作,但不将球击出,只体会击球动作。击球手型和触球部位要正确,注意全身协调用力。垫击抛来的球 两人一组,一抛一垫。球要抛准,尽量固定抛球的高度、速度及落点,垫球人用原地正面垫球的动作将球垫回。当初步学会垫球动作后,再逐渐加大难度,适当将球抛在练习人的前后、左右,要求练习者移动后仍作正面垫球。
排球基本知识
排球基本知识 比赛场地长18米、宽9米,由中线将球场分为两个相等的场区,中线设置长9.50米、宽1米的球网。男子网高2.43米,女子网高2.24米。球由皮革制成外壳,内装用橡皮或类似物质制成的球胆,重260~280克。比赛方法采用每球得分制,为五局三胜,前四局每局先得25分者为胜,第五局先得15分者为胜,若出现24平或14平时,要继续比赛至某队领先2分才能取胜。双方上场的运动员必须轮转位置。上场运动员每队为6人。每方必须在3次以内将球击过网。 基本技术 1 排球基本技术概念 排球基本技术是指运动员在比赛中采用的各种合理击球动作和未完成击球动作必不可少的其他配合动作的总称。 发球、垫球、传球、扣球、和拦网是排球运动中5项完整的击球动作,又称有球技术。凡属没有触及球的各种准备姿势、移动、起跳以及前仆、滚翻、鱼跃、倒地等均为配合动作,或称无球动作。合理的击球动作和配合动作,首先要符合规则的要求,符合人体剖学和运动生物力学的原理,同时要结合个人的特点。完成动作时要做到协调、轻松、正确、省力,能够充分发挥人的体能和技能,能充分运用时间和空间的变化。 排球技术主要有步法移动和击球手法组成。排球规则允许比赛中运动员可用身体的任何部位接球。
基本技术分为六大项:准备姿势和移动、传球、垫球、发球、扣球、拦网。 1)准备姿势和移动:准备姿势就是准备迎接各种来球的身体姿势。在排球比赛中攻防的多数技术都是在准备姿势或快速移动后完成的,因此它是完成各项基本技术的基础。移动的作用是为了接近球,保持好人与球的位置关系,以保证击球动作的合理。 比赛中常用的移动步法有滑步、交叉步、跨步和跑步。 2)传球:传球是在额前上方用双手(或单手)借助蹬地、伸臂动作,通过手腕手指的弹击力量来完成的击球技术动作。传球主要作用是把接起的球传给前排队员进攻。一个队的进攻能力能否充分发挥,在很大程度上取决于该队的传球水平。为了争夺网上优势,使进攻战术快速多变,二传手更起着核心作用。 3)垫球:是在距腹前一臂距离处借助蹬地、抬臂动作,用双手前臂的前部,利用来球的反弹力将球击出的技术动作。垫球在比赛中多用于接发球、接扣球和接拦回球,是比赛中争取多得分、少失分由被动变主动的重要技术。 4)发球:由队员自己抛球,用一只手将球从网上空两标志杆内击入对方场区的技术动作。发球是比赛和进攻的开始。是排球技术中唯一不受别人制约的技术动作。攻击性强的发球不仅可以直接得分,还能破坏和削弱对方的进攻,打乱对方的部署,在心理上给对方造成威胁。
体育教案-排球正面双手垫球 教学内容:排球正面双手垫球 教学目标: 1、初步学会排球正面垫球的基本技术。 2、发展协调性、灵敏性、增强全身协调能力; 3、培养学生面对任何困难都不要轻言放弃,勇于向前、顽强、果断的优良品质;且在不断 的尝试中找出最佳的方法与快捷方式,建立与培养学生的自信心。 教学重点:应放在垫球时的手型正确,击球部位准确。。 教学难点:垫球时的全身协调用力。 班级:高一·1班人数:66人器材:排球34个授课教师:安耀东 程序教学内容 教学 目标 组织队形教法学法要求时间 开始部分1、体育委员集 合,整队,报告人 数 2、宣布课的 内容任务 3、检查服装 4、安排见习生 培养体育骨 干,提高学 生自觉组织 能力 队形: ×××××××××× ×××××××××× ¤¤¤¤¤¤¤¤¤¤ ¤¤¤¤¤¤¤¤¤¤ △ 教师在旁 边观察、提 醒 统一服 装、精神 饱满 集合做到 快、静、齐 3 分 钟 准备部1、慢跑400米 2、4节徒手操 3、游戏: “滚球接力” 将学生分成人数相 等的八队,两脚开 立成一路纵队,游 使学生能尽 快进入运动 状态 活跃课堂气 氛,提高学 绕田径场慢跑一圈, 以四路纵队进行。 队形:八人一组,全班分成八组。 10 分
分 戏开始,由排头同学持排球沿后面同学的两脚之间滚向排尾,排尾接球后 又跑到排头将球滚向排尾,依次进行,以最先完成的队为胜。 生的学习兴趣。 另外两名同学做裁判员 由教师讲解、强调游戏要求和规则 学生模拟做一次 在发令前学生要做好准备,每个球都要 按要求滚。否则算犯规。 钟 基 一、徒手模仿和自垫球练习: 教师口述重点:手型正确,击球部位准确。 难点:全身协调用力,控制好来球。 动作要领: 插、夹、抬 二、抛接球和对垫球练习: 抛接球: 两人一组, 两人一球, 一人抛球, 一人接球。 学生能体会动作 学生能掌握用 力顺序及垫球基本手型 动作基本 合理 组织队形:(同做操队形) ×××××××××× ×××××××××× ¤¤¤¤¤¤¤¤¤¤ ¤¤¤¤¤¤¤¤¤¤ △ 组织队形: ××××××××××××× Δ ¤¤¤¤¤¤¤¤¤¤¤¤¤ 两人一组,两人一球,一人练习,一人在旁观察;一分钟后互换。 垫球手型的练习:集体原地徒手练习,教师进行检查纠正。 教师巡回指导及时纠正错误 同上 当初步学会垫球动1、徒手分解动作练习 2、尝试垫球 3、两人一 球进行自垫练习 4、两人一组结合球练习 5、抛接球练习 要求: 注意垫球动作要合 理;小臂要夹紧;手臂要伸直;垫击面要平 整。 蹬地和伸臂动作协调,动作要正确。 要求: 动作配合 协调。 正面双手垫球的击 球点,一般 10 分 钟
排球双手垫球动作要领 双手下手垫球动作要领:半蹲姿势,正面对着来球方向,当球临近时,两手相抱成垫球手型,垫球技术按连贯动作的顺序一般可概括为“一插、二夹、三抬臂”。“插”,就是用垫球手型和双臂插到球下,下插的程度应能保证以小臂的前半部击球为宜。插臂的角应要根据来球的弧度作相应的变化。“夹”,就是夹臂。完成夹臂动作要自然,并配合有提肩、含胸、压腕及挺肘等动作。“抬臂”,就是用蹬地、压腕、挺肘、抬臂等动作协调地将球有控制,有目的地垫出。 正面双手垫球是各种垫球技术的基础,适合接速度快、弧度平、力量大、落点低的各种来球。它是在准备姿势的基础上,判断来球的路线与落点,迅速移动取位,把来球保持在腹部的正前方,两臂插入球下并对准来球。垫球时,利用蹬腿移体和提肩抬臂的协调动作,以两前臂所组成的平面击球的后下方,同时身体重心伴随击球动作前移,将球向前上方垫出。 1、准备姿势 准备姿势分半蹲和深蹲两种。半蹲主要用于接轻球及中等力量的来球;而深蹲则用于垫重球。比赛中应根据不同情况采用相应的准备姿势。初学垫球时,由于是垫一般的轻球,故可采用半蹲准备姿势。做准备姿势时应正面对准来球方向,两脚前后开立,两脚距离稍宽于肩,后脚跟
提起,前脚掌着地,两脚和两膝内收,膝部垂直面应超出脚尖。上体前倾,重心降低,并置于前脚掌的拇指根部,两肩的垂直面超出膝部。两臂微屈内靠,两臂自然下垂,两手置于腹前。两眼注视来球,两脚要保持“静中待动”的状态,随时准备移动。 2、击球手型 目前常用的击球手型有两种。一种是叠指法,两手手指上下重叠,掌根紧靠,合掌互握,两拇指朝前相对平行靠压在上面一手的中指第二指节上。两臂伸直夹紧,注意手掌部分不能相叠。另一种是包拳法,两手抱拳互握,两拇指平行朝前,两掌根和两前臂外旋紧靠,手腕下压,使前臂形成一个垫击平面。 3、击球点、击球部位 正面双手垫球的击球点一般应尽量保持在腰腹前的 一臂距离,有两小臂腕关节以上10厘米左右桡骨内侧平 面击球为宜。击球部位过高,既不便于控制球,而且易造成“持球”或“连击”犯规;击球部位过低,垫在虎口上,球易不稳,对球的方向、力量控制不准。 4、击球动作 在判断来球移动取位的同时,应根据来球情况和击球的需要变化身体重心,使击球点保持在腹部高度的正前方,