*****************
2.3数据预处理
对原始三维人脸数据的预处理包括平滑、补洞、切割以及坐标矫正等步骤。
2.3.1面部数据的平滑、补洞和切割0
扫描时,由于光照条件的变化、人脸不光滑的表面以及头发等复杂结构的影响,三维采样数据通常会有一些需要弥补或平滑的区域。在耳朵、下巴等部位扫描采样时可能捕捉不到三维信息会形成空洞,有些地方则因为局部表面不光滑会产生毛刺。这里通过交互的方式,使用插值、平滑等方法补上三维人脸上的空洞并去掉毛刺。
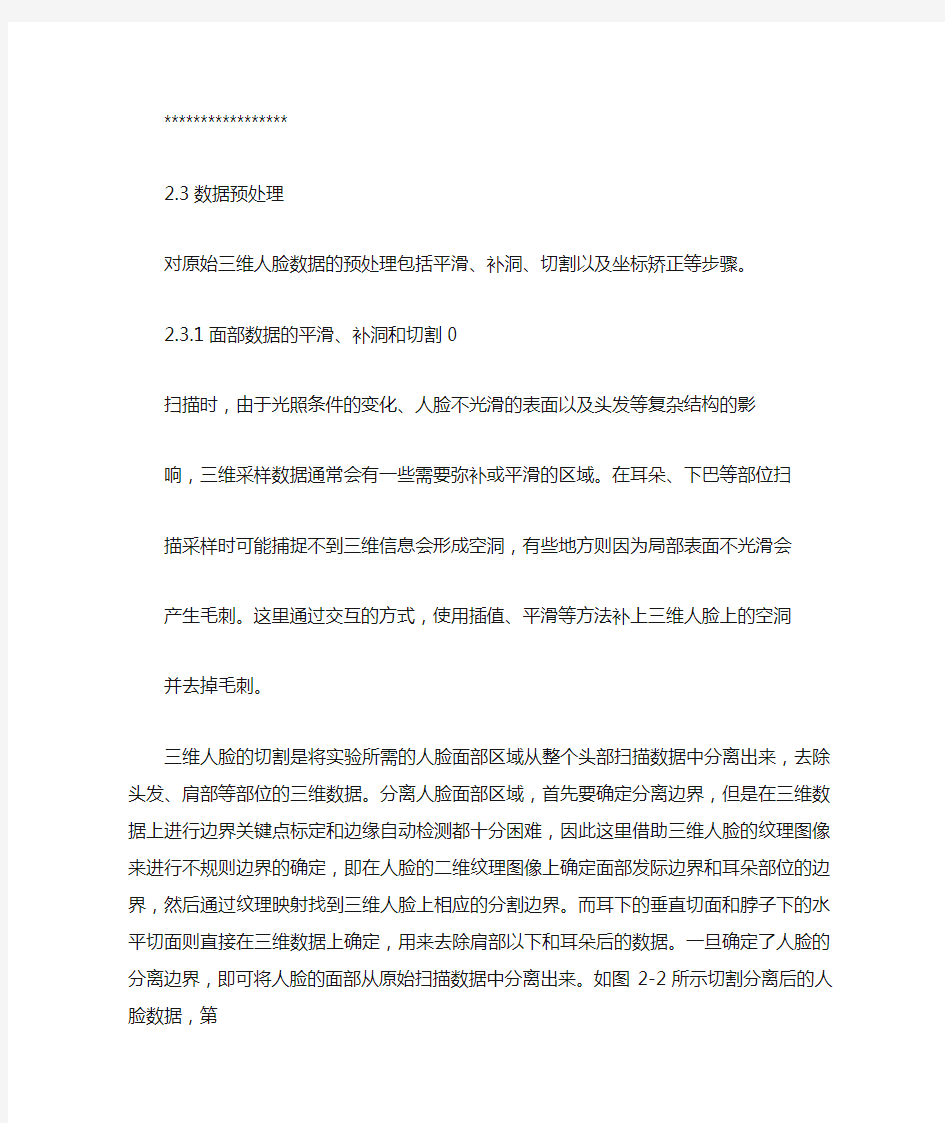
三维人脸的切割是将实验所需的人脸面部区域从整个头部扫描数据中分离出来,去除头发、肩部等部位的三维数据。分离人脸面部区域,首先要确定分离边界,但是在三维数据上进行边界关键点标定和边缘自动检测都十分困难,因此这里借助三维人脸的纹理图像来进行不规则边界的确定,即在人脸的二维纹理图像上确定面部发际边界和耳朵部位的边界,然后通过纹理映射找到三维人脸上相应的分割边界。而耳下的垂直切面和脖子下的水平切面则直接在三维数据上确定,用来去除肩部以下和耳朵后的数据。一旦确定了人脸的分离边界,即可将人脸的面部从原始扫描数据中分离出来。如图2-2所示切割分离后的人脸数据,第
一幅是分离后的几何形状,第二幅是其对应的纹理图像,第二行是分离后不同角度的三维面部图像。
图2-2分离后的三维人脸
Figure 2-2 The cutted 3D face
2.3.2人脸数据坐标矫正
在扫描时,人脸的姿态是通过人工交互的方式进行调整矫正,虽然要求被扫
描者目视前方,头部保持垂直,但实际扫描得到的人脸存在一定的误差。因此需要对不同的人脸数据进行了坐标矫正,将不同的人脸统一到同一个坐标系。考虑到切割后的人脸数据接近一个柱面分布,这里使用人脸数据的离散点集来拟和一个柱面曲面,使用柱面的中心轴作为人脸数据新的垂直坐标轴(Z轴),并取过鼻尖点且与新的垂直坐标轴垂直相交的直线作为新的前向坐标轴(Y轴),新的X 坐标轴由Y,Z的叉乘得到。通过上面的矫正方法可以得到每个人脸新的坐标系,从而经过坐标变换可以将所有人脸数据变换到朝向、姿态相同的坐标系。如图
2-3
是三维人脸的坐标矫正,其中Z是矫正后的垂直轴,Z0是矫正前的垂直轴,X,Y,Z是矫正后的坐标轴。
图2-3人脸柱面矫正
Figure 2-3 Face recorrected by a cylinder
*****************
人脸识别的图像预处理知识和算法研究
图像预处理知识
预处理是人脸识别过程中的一个重要环节。输入图像由于图像采集环境的不同,如光照明暗程度以及设备性能的优劣等,往往存在有噪声,对比度不够等缺点。另外,距离远近,焦距大小等又使得人脸在整幅图像中间的大小和位置不确定。为了保证人脸图像中人脸大小,位置以及人脸图像质量的一致性,必须对图像进行预处理。
人脸图像的预处理主要包括人脸扶正,人脸图像的增强,以及归一化等工作。人脸扶正是为了得到人脸位置端正的人脸图像;图像增强是为了改善人脸图像的质量,不仅在视觉上更加清晰图像,而且使图像更利于计算机的处理与识别。归一化工作的目标是取得尺寸一致,灰度取值范围相同的标准化人脸图像。下面简单介绍一些预处理的方法。
(1)直方图均衡
直方图是一种点操作,它逐点改变图像的灰度值,尽量使各个灰度级别都具有相同的数量的像素点,使直方图趋于平衡。直方图均衡可以使输入图像转换为在每一个灰度级上都有相同像素点数的输出图像(即输出的直方图是平的)。这对于图像比较或分割是十分有用的。
设图像有N个灰度级,M个像素点,ha(n)是输入图像a (x ,y)的直方图,图像b (x, y)是输入图像直方图均衡后的输出,依照下面的公式进行直方图均衡:
(2)中值滤波
无论是直接获取的灰度图像,还是由彩色图像转换得到的灰度图像,里面都有噪声的存在,噪声对图像质量有很大的影响。进行中值滤波不仅可以去除孤点噪声,而且可以保持图像的边缘特性,不会使图像产生显著的模糊,比较适合于实验中的人脸图像。
中值滤波是一种非线性的信号处理方法,因此中值滤波器也就是一种非线性的滤波器。中值滤波器最先被应用于一维信号的处理中,后来被人们引用到二维图像的处理中来。中值滤波可以在一定程度上克服线性滤波所带来的图像细节模糊,而且它对滤除脉冲干扰和图像扫描噪声非常有效。
中值滤波一般采用一个含有若干个点的滑动窗口,将窗口中各点灰度值的中值来代替指定点(一般是窗口的中心点)的灰度值。如果窗口中有奇数个元素,中值取元素按灰度值大小排序后的中间元素灰度值。如果窗口中有偶数个元素,中值取元素按灰度值大小排序后,中间两个元素灰度的平均值。因为图像为二维信号,中值滤波的窗口形状和尺寸对滤波器效果影响很大,不同图像内容和不同应用要求往往选用不同的窗口形状和尺寸。
(3)归一化
人脸图像的归一化,目的是使不同成像条件(光照强度,方向,距离,姿势等)下拍摄的同一个人的照片具有一致性。人脸归一化包括两个方面的内容:一是几何归一化,二是灰度归一化。几何归一化也称为位置校准,它将有助于矫正因成像距离和人脸姿势变化造成的尺寸差异和角度倾斜。它的目的在于解决人脸尺度变化和人脸旋转问题。具体包括人脸尺度归一化,平面人脸旋转矫正(歪头),深度人脸旋转矫正(扭脸)三个环节。严格的深度人脸旋转矫正需要利用人脸的3D模型。灰度归一化用来对不同光强,光源方向下得到的人脸图像进行补偿。以减弱单纯由于光照变化造成的图像信号的变化。
人脸检测算法的研究
人脸的检测过程实际上就是对人脸模式特征的综合判断过程,包括多种方法。归纳起来,根据利用特征的色彩属性可以将人脸检测算法分为基于肤色特征的方法和基于灰度特征的方法两类。前者适用于构造快速的人脸检测和跟踪算
法,后者利用了人脸区别其他物体的更为本质的特征,是人脸检测研究领域的重点。根据特征综合时采用的不同模型,可以将基于灰度特征的方法分为两大类,基于知识模型的方法和基于统计模型的方法。由于人脸检测问题的复杂性,无论哪一方法都无法适应所有的情况,一般都针对人脸检测领域内某个或某些特定的问题。
基于haar-like特征的人脸检测
人脸检测不仅要求有较高的检测率,同时也要求能够满足实时性的要求, P.Viola发表
的关于haar-like特征人脸检测的文章,他通过综合AdaBoost和Cascade算法实现了实时的人脸检测系统,使得人脸检测从真正意义上走向了实用。我们在综合考虑了各方面因素的前提下,选择了这种基于haar-like特征的人脸检测方法。
基于haar-like特征人脸检测的原理
Viola提出了一种层叠递进式分类方法,该方法与那些复杂的单层分类方法相比,在达到相同检测率要求的前提下,能够极大地缩短检测时间,该方法是基于简单特征的,与传统的基于图像像素特征的方法相比具有以下几个优点:(1)它比使用像素特征的方法更具有可分性,它能够增大类间差异同时使类内差异减小。这是因为这些特征往往包括了相关领域知识的概括,而这也恰恰是很难直接从像素中得到的。
(2)特征的计算速度很快,同时还可以满足在图像任意位置和任意大小条件下的计算要求。
特征集
特征集一共包含14个特征,它是在Viola提出的haar-like特征集的基础上变化而来,它将原始的haar-like特征进行45度的旋转,得到了一系列新的特征,同时抛弃了具有包围特性的特征,如图所示
********************
图像预处理
3.1灰度级变换
一、灰度级变换的定义
灰度级变换(点运算)的定义
★对于输入图象f(x,y),灰度级变换T将产生一个输出图像g(x,y),且g(x,y)的每一个像素值都是由f(x,y)的对应输入像素点的值决定的,g(x,y)=T(f(x,y))。
★对于原图象f(x,y)和灰度值变换函数T(f(x,y)),由于灰度值总是有限个(如:O~2 5 5),非几何变换可定义为:R=T(r),其LlJ R、r(O.255)。
二、灰度级变换的实现
灰度级变换(点运算)的实现
R=T(r)定义了输入像素值与输出像素之间的映射关系,通常通过查表来实现。
三、灰度级变换实例
1、图象求反
2、对比度拉伸
3、动态范围压缩
4、灰度级切片
3.2图像的灰度直方图
灰度直方图(histogram)统计了图象中各个灰度级的象素的个数。
一、灰度直方图的计算
若图象具有L级灰度(通常L=256,即8位灰度级),则大小为m(n的灰度图象f(x,Y)的灰度直方图H[k],k=0…L-1,可按如下步骤计算获得:
1)初始化:for(k=O;k 2)统计: for(x=O;x for(y=O;y 3)规格化: flOr(x=O;x for(y=O;y 二、直方图均衡化 直方图均衡化是通过灰度变换将一幅图象转换为另一幅具有均衡直方图,即在每个灰度级上都具有相同的象素点数的过程。 直方图均衡化变换:设灰度变换s=f(r)为斜率有限的非减连续可微函数,它将输入图象Ii(x,y)转换为输出图象Io(x,y),输入图象的直方图为Hi(r),输出图象的直方图为Ho(s),则根据直方图的含义,经过灰度变换后对应的小面积元相等:Ho(s)ds=Hi(r)dr 变换函数f(r)必须满足下列2个条件: ★(1)f(r) (O(r(1)是单值函数、且单调增加; ★(2)O(f(r) (1,(O(r(1)。 上面第一个条件保证了灰度级从黑到白的次序,第二个条件保证了变换后象素 的灰度级仍然在容许的范围之内。r=f-l(s)为逆变换函数,同样也要满足上述条件。 直方图修正的例子 假设有一幅图像,共有6 4(6 4个象素,8个灰度级,试进行直方图均衡化处理。根据公式可得: s2=0.19+0.25+0.2l=O.65, s3=0.19+0.25+0.2l+O.16=0.8l, s4=0.89,s5=0.95,s6=0.98,s7=1.00。 由于这里只取8个等间距的灰度级,变换后的s值也只能选择最靠近的一个灰度级的值。因此,根据上述计算值可近似地选取: sO"1/7,s 1¨3/7,s2¨5/7,s3"6/7, s4¨6/7,s5¨1,s6¨l,s7¨1。 可见,新图像将只有5个不同的灰度等级,于是我们可以重新定义其符号: s'O=l/7,s’1=3/7,s'2=5/7,s’3=6/7,s’4=l。 因为由rO=O经变换映射到sO=1/7,所以有n0=790个象素取sO这个灰度值;由rl=3/7映射到sl=3/7,所以有1 02 3个象素取s 1这一灰度值;依次类推,有850个象素取s2=5/7这一灰度值;由于r3和r4均映射到s3=6/7这一灰度值,所以有656+329=98 5个象素都取这一灰度值;同理,有245+1 22+81=448个象素都取s4=1这一灰度值。上述值除以n=4096,便可以得到新的直方图。离散情况下不可能作到绝对的一致。 三、直方图的性质 在直方图中,只知道具有某一灰度值的象素有多少个,但并不知道这些象素的位置; 一个图像决定一个唯一的直方图,但是有时不同的图像具有相同的直方图; 如果已知一幅图像中各个区域的直方图,则把它们加起来,就可得到这个图像的直方图。 四、直方图的典型用途 对图像进行数字化时,利用直方图可以检查输入图像的灰度值在可利用的灰度范围内分配得是否适当; 在医学方面,为了改善X射线操作人员的工作条件,可采用低辐射X射线曝光,但这样获得的X光片灰度级集中在暗区,导致某些图像细节无法看清,判读困难。通过直方图修正使灰度级分布在人眼合适的亮度区域,便可使X片中的细节清晰可见。 可以根据直方图确定二值化的阈值; 当物体部分的灰度值比其它部分的灰度值大时,可以用直方图求出物体的面积(实际上是象素数=灰度大于和等于q的象素的总和); 当物体部分的灰度值比其它部分的灰度值大时,可以用直方图求出物体的面积(实际上是象素数=灰度大于和等于q的象素的总和);利用色彩直方图可以进行基于颜色的图象分割。 3.3几何变换 几何变换可改变图象中物体(象素)之间的空间关系。这种运算可以看成将各象素在图象内移动的过程。 几何变换中灰度级插值是必不可少的组成部分,因为图象一般用整 数位置处的象素来定义,某个点经变换后可能映射到多个点之间。 仿射变换(Affine Transformation)和图象卷绕(ImageWarping)是两类常见的几何运算。 一、灰度级插值 1、最近邻插值 ★最简单的插值方法是最近邻插值,即选择离它所映射到的位置最近的输入象素的灰度值为插值结果。 2、双线性插值: 二、空间变换 空间变换包括可用数学函数表达的简单变换(如:平移、拉伸等仿射变换)和依赖实际图象而不易用函数形式描述的复杂变换(如对存在几何畸变的摄象机所拍摄的图象进行校正,需要实际拍摄栅格图象,根据栅格的实际扭曲数据建立空间变换;再如通过指定图象中一些控制点的位移及插值方法来描述的空间变换)。 1、仿射变换(affine transfomation) 仿射变换变换的公式如下:f(x)=AX=b 其中A是变形矩阵,b是平移矢量。 任何一个放射变换可以分解为尺度、伸缩、扭曲、旋转、平移的组合。 2、基本变换 (1)基本几何变换的定义 对于原图象f(x,y),坐标变换函数 x’=a(x,y);y’=b(x,y) 唯一确定了几何变换:g(x’,y’)=f(a(x,y),b(x,y)); g(x,y)是目标图象。 (2)平移变换 (3)旋转变换:绕原点旋转(度 (4)水平镜像 (5)垂直镜像 (6)缩放变换 3、透视变换(Persp ective Tmnsfomation) 透视变换是中心投影的射影变换,在用非齐次射影坐标表达时是平面的分式线性变换,透视变换常用于图象的校正。 4、几何校正 几何校正是指按照一定目的将图象中的典型几何结构校正为没有变形的本来形式。 例如,对如F的走廊图象进行校正,分两种情况,一种是针对地砖形状的校正,另一种是针对最右侧有把手的门形状的校正。 5.图象卷绕(Image Warping) 图象卷绕是通过指定一系列控制点的位移来定义空间变换的图象变形处理。非控制点的位移根据控制点进行插值来确定。 3.4图像的局部预处理 一、平滑 l、邻域平均 ★A、邻域的定义 ★B、邻域平均法 ★对一数字图像f(x,y),以(x,y)为中心,取一滑动窗口--邻域S(例如: 3×3的方窗)进行处理: ★缺点:去噪声的同时模糊了边界。 ★注意:当邻域中心落在图像边界上:(O行/列或N-l行/列)时 ★A、边界行/列点不处理; ★B I、扩充上下两行、左右两列(复制)。 2、高斯滤波 二、中值滤波 一般的中值滤波(Median Filtering) 与加权平均方式的平滑滤波不同,中值滤波是将邻域中的象素按灰度级排序,取其中间值为输出象素。 ★1)中值滤波可以保护图像边界; ★2)中值滤波窗口越人,滤波作用越强,但会丢失细节。 中值滤波是一种非线性滤波,适用于滤除脉冲噪声或颗粒噪声,并能保护图像边缘。这里以一维中值滤波为例:一维中值滤波就是用一个含有奇数点的一维滑动窗口,将窗口正中的那点值用窗口内各点按大小排列的中值代替。假设窗口长为5点,其中的值为(80,90,200,11 O,1 20),那么此窗口内的中值即为11O。 三、边缘检测 边缘是指图象中灰度发生急剧变化的区域。图象灰度的变化情况可以用灰度分布的梯度来反映,给定连续图象f(x,y),其方向导数在边缘法线方向上取得局部最大值。 图象中一点的边缘被定义为一个矢量,模为当前点最人的方向导数,方向为该角度代表的方向。通常我们只考虑其模,而不关心方向。 四、梯度算子 (一)梯度算子可分为3类: ★1、使用差分近似图像函数导数的算子。有些是具有旋转不变性的(如:Laplacian算子),因此只需要一个卷积掩模来计算。其它近似一阶导数的算子使用几个掩模。 ★2、基于图像函数二阶导数过零点的算子(如:M arr—Hild reth或Canny 边缘检测算子。 ★3、试图将图像函数与边缘的参数模型相匹配的箅子。 (二)第一类梯度算子 拉普拉斯(Laplace)算子通常使用3×3的掩模,有时也使用强调中心象素或其邻接性的拉普拉斯算子(这种近似不再具有旋转不变性)。 拉普拉斯算子的缺点:它对图像中的某些边缘产生双重响应。 图像锐化(shapeening) 图像锐化的目的是图像的边缘更陡峭、清晰。锐化的输出图像f是根据下式从输入图像g得到的:f(i,j)=g(i,j)-c s(i,j),其中c是反映锐化程度的正系数,s(i,j)是图像函数锐化程度的度量,用梯度箅子来计算,Laplacian 箅子常被用于这一目的。 Prewitt边缘检测算子 Sob e1边缘检测算子 (三)第二类梯度算子--二阶导数过零点算子 根据图象边缘处的一阶微分(梯度)应该是极值点的事实,图象边缘处的二阶微分应为零,确定过零点的位置要比确定极值点容易得多也比较精确。右侧是Lena 的过零点检测结果。 为抑制噪声,可先作平滑滤波然后再作二次微分,通常采用高斯函数作平滑滤波,故有LoG(Laplacian of Gaussian)算子。 高斯-拉普拉斯(LoG,Laplacian of Gaussian)算子。 噪声点对边缘检测有较大的影响,效果更好的边缘检测器是高斯-拉普拉斯(Lo G)算子。它把高斯平滑滤波器和拉普拉斯锐化滤波器结合起来,先平滑掉噪声,再进行边缘检测,所以效果更好。 过零点检测 在实现时一般用两个不同参数的高斯函数的差DoG(Difference ofGaussians)对图象作卷积来近似,这样检测来的边缘点称为f(x,y)的过零点(Zero—crossing)。 与前面的微分算子出仅采用很小的邻域来检测边缘不同,过零点(Zero-crossing)的检测所依赖的范闱与参数。有关,但边缘位置与0的选择无关,若只关心全局性的边缘可以选取比较大的邻域(如0=4时,邻域接近40个象素宽)来获取明显的边缘。过零点检测更可靠,不易受噪声影响,但.缺点是对形状作了过分的平滑,例如会丢失欠明显的角点;还有产生环行边缘的倾向。 产生环行边缘的原因是:图象的边缘多出现于亮度呈现突起或凹陷的位置上,其附近边缘法向线条上一阶微分会出现两个极值点,也就是会出现两个过零点。其整体结果是边缘呈现环行状态。 (四)Canny边缘提取【或边缘检测Edge Detection) 在如下的三个标准意义下,Canny边缘检测算子对受闩噪声影响的阶跃型边缘是最优的: ★1)检测标准--不丢失重要的边缘,不应有虚假的边缘; ★2)定位标准--实际边缘与检测到的边缘位置之间的偏差最小; ★3)单响应标准--将多个响应降低为单个边缘响应。 Canny边缘检测算子的提出是基于以下概念: (1)边缘检测算子是针对一维信号和前两个最优标准(即检测标准和定位标准)表达的,用微积分方法可以得到完整的解; (2)如果考虑第三个标准(多个响应),需要通过数值优化的办法得到最优解,该最优滤波器可以有效地近似为标准差为(的高斯平滑滤波器的一阶微分,其误差小于20%,这是为了便于实现;这与M ar—Hild reth边缘检测算子很相似;它是基于LoG边缘检测算子的; (3)将边缘检测箅子推广到两维情况。阶跃边缘由位置、方向和可能的幅度(强度)来确定。可以证明将图象与一对称2 D Gaussian做卷积后再沿梯度方向微分,就构成了一个简单而有效的方向算子(回想一下,LoG过零点算子并不能提供边缘方向的信息,因为它使用了Laplacian滤波器)。 (4)由于噪声引起的对单个边缘的(多个)虚假响应通常造成所谓的“纹状(streaking)"问题。一般而言,该问题在边缘检测中是非常普遍的。 边缘检测算子的输出通常要做阈值化处理,以确定哪些边缘是突出的。 纹状是指边缘轮廓断开的情形,是由算子输出超出或低于阈值的波动引起的。纹状现象可以通过带滞后的阈值处理(thresh01ding withhysteresis)来消除; 如果边缘响应超过一给定高阈值时,这些象素点构成了某个尺度下的边缘检测算子的确定的输出。 个别的弱响应通常对应于噪声,但是如果这些点是与某些具有强响应的点连 接时,它们很可能是图象中真实的边缘。这些连接的象素点在当其响应超过一给定的低阈值时,就被当作边缘象素。 这里的低阈值和高阈值需要根据对信噪比的估计来确定。 (5)算子的合适尺度取决于图象中所含的物体情况。解决该未知数的方法是使用多个尺度,将所得信息收集起来。不同尺度的Canny检测算子由高斯的不同的标准差(来表示。有可能存在几个尺度的算子对边缘都给出突出的响应(即信噪比超过阈值);在这种情况下,选择具有最小尺度的算子,因为它定位最准确。特征综合方法(Feature synthesis appmach) 首先标记出所有由最小尺度算子得到的突出边缘。具有较大尺度(的算子产生的边缘根据它们(标记出的边缘)合成得到(即,根据从较小的尺度收集到的证据来预测较大尺度(应具有的作用效果)。然后将合成得到的边缘响应与较大尺度(的实际边缘响应作比较。仅当它们比通过合成预测的响应显著地强时,才将其标记为边缘。 这一过程可以对一个尺度序列(从小到大)重复进行,通过不断加入较小的尺度中没有的边缘点的方式累积起来生成边缘图。 Canny边缘检测算法 l、对于递增的标准差(重复(2)到(6)步骤); 2、将图象f与尺度为高斯函数做卷积; 3、对图象中的每个象素,估计局部边缘的法向n; 4、用非最大抑制公式找到边缘的位置; 5、用公式计算边缘强度; 6、对边缘图像做滞后阈值化处理,消除虚假响应; 7、用特征综合方法,收集来自多尺度的最终的边缘信息。 (通常的实现,省略该步。) 图像预处理-正文 在图像分析中,对输入图像进行特征抽取、分割和匹配前所进行的处理。图像预处理的主要目的是消除图像中无关的信息,恢复有用的真实信息,增强有关信息的可检测性和最大限度地简化数据,从而改进特征抽取、图像分割、匹配和识别的可靠性。预处理过程一般有数字化、几何变换、归一化、平滑、复原和增强等步骤。 数字化一幅原始照片的灰度值是空间变量(位置的连续值)的连续函数。在M×N点阵上对照片灰度采样并加以量化(归为2b个灰度等级之一),可以得到计算机能够处理的数字图像。为了使数字图像能重建原来的图像,对M、N和b 值的大小就有一定的要求。在接收装置的空间和灰度分辨能力范围内,M、N和b 的数值越大,重建图像的质量就越好。当取样周期等于或小于原始图像中最小细节周期的一半时,重建图像的频谱等于原始图像的频谱,因此重建图像与原始图像可以完全相同。由于M、N和b三者的乘积决定一幅图像在计算机中的存储量,因此在存储量一定的条件下需要根据图像的不同性质选择合适的M、N和b值,以获取最好的处理效果。 几何变换用于改正图像采集系统的系统误差和仪器位置的随机误差所进行的变换。对于卫星图像的系统误差,如地球自转、扫描镜速度和地图投影等因素所造成的畸变,可以用模型表示,并通过几何变换来消除。随机误差如飞行器姿态和高度变化引起的误差,难以用模型表示出来,所以一般是在系统误差被纠正 后,通过把被观测的图和已知正确几何位置的图相比较,用图中一定数量的地面控制点解双变量多项式函数组而达到变换的目的。 归一化使图像的某些特征在给定变换下具有不变性质的一种图像标准形式。图像的某些性质,例如物体的面积和周长,本来对于坐标旋转来说就具有不变的性质。在一般情况下,某些因素或变换对图像一些性质的影响可通过归一化处理得到消除或减弱,从而可以被选作测量图像的依据。例如对于光照不可控的遥感图片,灰度直方图的归一化对于图像分析是十分必要的。灰度归一化、几何归一化和变换归一化是获取图像不变性质的三种归一化方法。 平滑消除图像中随机噪声的技术。对平滑技术的基本要求是在消去噪声的同时不使图像轮廓或线条变得模糊不清。常用的平滑方法有中值法、局部求平均法和k近邻平均法。局部区域大小可以是固定的,也可以是逐点随灰度值大小变化的。此外,有时应用空间频率域带通滤波方法。 复原校正各种原因所造成的图像退化,使重建或估计得到的图像尽可能逼近于理想无退化的像场。在实际应用中常常发生图像退化现象。例如大气流的扰动,光学系统的像差,相机和物体的相对运动都会使遥感图像发生退化。基本的复原技术是把获取的退化图像g(x,y)看成是退化函数h(x,y)和理想图像f(x,y)的卷积。它们的傅里叶变换存在关系G(u,v=H(u,v)F(u,v)。根据退化机理确定退化函数后,就可从此关系式求出F(u,v),再用傅里叶反变换求出f(x, y)。通常把称为反向滤波器。实际应用时,由于H(u,v)随离开uv平面原点的距离增加而迅速下降,为了避免高频范围内噪声的强化,当u2+v2大于某一界限值W娿时,使M(u,v)等于1。W0的选择应使H(u,v)在u2+v2≤W娿范围内不会出现零点。图像复原的代数方法是以最小二乘法最佳准则为基础。寻求一估值弮,使优度准则函数值最小。这种方法比较简单,可推导出最小二乘法维纳滤波器。当不存在噪声时,维纳滤波器成为理想的反向滤波器。 增强对图像中的信息有选择地加强和抑制,以改善图像的视觉效果,或将图像转变为更适合于机器处理的形式,以便于数据抽取或识别。例如一个图像增强系统可以通过高通滤波器来突出图像的轮廓线,从而使机器能够测量轮廓线的形状和周长。图像增强技术有多种方法,反差展宽、对数变换、密度分层和直方图均衡等都可用于改变图像灰调和突出细节。实际应用时往往要用不同的方法,反复进行试验才能达到满意的效果。 1概述 随着计算机软硬件技术的快速发展,大规模复杂场景的实时绘制已经成为可能,这也加快了虚拟现实技术的发展,又对模型的复杂度和真实感提出了新的要求。虚拟场景是虚拟现实系统的重要组成部分,它的逼真度将直接影响整个虚拟现实系统的沉浸感。客观世界在空间上是三维的,而现有的图像采集装置所获取的图像是二维的。尽管图像中含有某些形式的三维空间信息,但要真正在计算机中使用这些信息进行进一步的应用处理,就必须采用三维重建技术从二维图像中合理地提取并表达这些 三维信息。 三维建模工具虽然日益改进,但构建稍显复杂的三维模型依旧是一件非常耗时费力的工作。而很多要构建的三维模型都存在于现实世界中,因此三维扫描技术和基于图像建模技术就成了人们心目中理想的建模方式;又由于前者一般只能获取景物的几何信息,而后者为生成具有照片级真实感的合成图像提供了一种自然的方式,因此它迅速成为目前计算机图形学领域中的研究热点。 2三维建模技术 三维重建技术能够从二维图像出发构造具有真实感的三维图形,为进一步的场景变化和组合运算奠定基础,从而促进图像和三维图形技术在航天、造船、司法、考古、 工业测量、 电子商务等领域的深入广泛的应用。3基于图像的三维重建技术 基于图像的建模最近几年兴起的一门新技术,它使用直接拍摄到的图像,采用尽量少的交互操作,重建场 景。 它克服了传统的基于几何的建模技术的许多不足,有无比的优越性。传统的三维建模工具虽然日益改进,但构建稍显复杂的三维模型依旧是一件非常耗时费力的工作。考虑到我们要构建的很多三维模型都能在现实世界中找到或加以塑造,因此三维扫描技术和基于图像建模技术就成了人们心目中理想的建模方式;又由于前者一般只能获取景物的几何信息,而后者为生成具有照片级真实感的合成图像提供了一种自然的方式,因此它迅速成为目前计算机图形学领域中的研究热点。 4 基于图像重建几何模型的方法 4.1 基于侧影轮廓线重建几何模型 物体在图像上的侧影轮廓线是理解物体几何形状的 一条重要线索1当以透视投影的方式从多个视角观察某一空间物体时,在每个视角的画面上都会得到一条该物体的侧影轮廓线,这条侧影轮廓线和对应的透视投影中心共同确定了三维空间中一个一般形状的锥体1显然,该物体必将位于这个锥体之内;而所有这些空间锥体的交则构成了一个包含该物体的空间包络1这个空间包络被称为物体的可见外壳,当观察视角足够多时,可见外壳就可以被认为是该物体的一个合理的逼近。鉴于此类算法一般需要大量的多视角图像,因此图像的定标工作就变得非常复杂。 4.2采用立体视觉方法重建几何模型 基于立体视觉重建三维几何是计算机视觉领域中的经典问题,被广泛应用于自动导航装置。近年来,立体视觉 图像三维重建技术 康皓,王明倩,王莹莹 (装甲兵技术学院电子工程系,吉林长春130117) 摘要:基于图像的三维重建属于计算机视觉中的一个重要的研究方向,从提出到现在已有十多年的历史。文章首先对三维重建技术做了详细阐述,并着重从计算机图形学的研究角度对基于图像建模技术进行了综述,介绍了 具有代表性的基于图像建模的方法及其最新研究进展,给出了这些方法的基本原理, 并对这些方法进行分析比较,最后对基于图像建模技术的未来研究给出了一些建议和应解决的问题。关键词:三维建模技术;图像建模技术;计算机图形学;虚拟现实中图分类号:TP271文献标识码:A 文章编号1006-8937(2009)11-0042-02 Three-dimensional image reconstruction technique KANG Hao,WANG Ming-qian,WANG Ying-ying (DepartmentofElectronicEngineering,ArmoredInstituteofTechnology,Changchun,Jilin130117,China) Abstract:Image-based Three-dimensional reconstruction is an important research direction in computer vision ,from now more than ten years'history.This article first describes three-dimensional reconstruction technique in detail and review image-based modeling techniques from the perspective of computer graphics research,introduce a representative of the method of image-based modeling and the latest research progress,give the basic principles of these methods,analysis and compare these methods,finally,give a number of recommendations and problems which should be solved on image-based modeling technology for future research. Keywords:three-dimensional modeling techniques;image modeling techniques;computer graphics;virtual reality 收稿日期:2009-03-19 作者简介:康皓(1978-),女,吉林长春人,硕士研究生,讲师,研 究方向:计算机辅助设计与编程。 TECHNOLOGICAL DEVELOPMENT OF ENTERPRISE 2009年6月Jun.2009 企业技术开发 第28卷 图像分割算法开题报告 摘要:图像分割是图像处理中的一项关键技术,自20世纪70年代起一直受到人们的高度重视,并在医学、工业、军事等领域得到了广泛应用。近年来具有代表性的图像分割方法有:基于区域的分割、基于边缘的分割和基于特定理论的分割方法等。本文主要对基于自动阈值选择思想的迭代法、Otsu法、一维最大熵法、二维最大熵法、简单统计法进行研究,选取一系列运算出的阈值数据和对应的图像效果做一个分析性实验。 关键字:图像分割,阈值法,迭代法,Otsu法,最大熵值法 1 研究背景 1.1图像分割技术的机理 图像分割是将图像划分为若干互不相交的小区域的过程。小区域是某种意义下具有共同属性的像素连通集合,如物体所占的图像区域、天空区域、草地等。连通是指集合中任意两个点之间都存在着完全属于该集合的连通路径。对于离散图像而言,连通有4连通和8连通之分。图像分割有3种不同的方法,其一是将各像素划归到相应物体或区域的像素聚类方法,即区域法,其二是通过直接确定区域间的边界来实现分割的边界方法,其三是首先检测边缘像素,然后再将边缘像素连接起来构成边界的方法。 图像分割是图像理解的基础,而在理论上图像分割又依赖图像理解,两者是紧密关联的。图像分割在一般意义下十分困难的,目前的图像分割处于图像的前期处理阶段,主要针对分割对象的技术,是与问题相关的,如最常用到的利用阈值化处理进行的图像分割。 1.2数字图像分割技术存在的问题 虽然近年来对数字图像处理的研究成果越来越多,但由于图像分割本身所具有的难度,使研究没有大突破性的进展,仍然存在以下几个方面的问题。 现有的许多种算法都是针对不同的数字图像,没有一种普遍适用的分割算法。 缺乏通用的分割评价标准。对分割效果进行评判的标准尚不统一,如何对分割结果做出量化的评价是一个值得研究的问题,该量化测度应有助于视觉系统中的自动决策及评价算法的优劣,同时应考虑到均质性、对比度、紧致性、连续性、心理视觉感知等因素。 与人类视觉机理相脱节。随着对人类视觉机理的研究,人们逐渐认识到,已有方法大都与人类视觉机理相脱节,难以进行更精确的分割。寻找到具有较强的鲁棒性、实时性以及可并行性的分割方法必须充分利用人类视觉特性。 知识的利用问题。仅利用图像中表现出来的灰度和空间信息来对图像进行分割,往往会产生和人类的视觉分割不一致的情况。人类视觉分割中应用了许多图像以外的知识,在很多视觉任务中,人们往往对获得的图像已具有某种先验知识,这对于改善图像分割性能是非常重要的。试图寻找可以分割任何图像的算法目前是不现实,也是不可能的。人们的工作应放在那些实用的、特定图像分割算法的研究上,并且应充分利用某些特定图像的先验知识,力图在实际应用中达到和人类视觉分割更接近的水平。 1.3数字图像分割技术的发展趋势 从图像分割研究的历史来看,可以看到对图像分割的研究有以下几个明显的趋势。 对原有算法的不断改进。人们在大量的实验下,发现一些算法的效 三维图像处理系统组成及实现方案 三维图像信息处理一直是图像视频处理领域的热点和难点,目前国内外成熟的三维信息处理系统不多,已有的系统主要依赖高性能通用PC完成图像采集、预处理、重建、构型等囊括底层和高层的处理工作。三维图像处理数据量特别大、运算复杂,单纯依靠通用PC很难达到实时性要求,不能满足现行高速三维图像处理应用。 本系统中,采用FPGA实现底层的信号预处理算法,其处理数据量很大,处理速度高,但算法结构相对比较简单,可同时兼顾速度和灵活性。高层处理算法数据量较少、算法结构复杂,可采用运算速度快、寻址方式灵活、通信机制强大的DSP实现[1,4]。 1 三维图像处理系统组成 1.1 硬件系统构成 该系统由五个模块组成,如图1所示。 系统信息处理流程见图2所示。CCD摄像机采集的多路模拟视频信号经MAX440按需要选定后,送入模数视频转换器SAA7111A将摄像机输出的模拟全电视信号CVBS转换成数字视频信号;之后视频信号流入图像预处理器Spartan XC3S400,经过提取中心颜色线、提取激光标志线和物体轮廓线的预处理后,配送到两片TS201进行定标参数计算、坐标计算、三维重建、数据融合以及三维构型的核心运算;最后将DXF文件数据经由PCI接口传送到PC,完成三维图像变换和显示等最终处理;整个系统的逻辑连接和控制以及部分数据交换由另一片FPGA来完成[1]。 在体系结构设计上,FPGA处理器采用SIMD结构,在一个控制单元产生的控制信号下,数据通路中的三个算法并行运行。由于该系统要求处理速度较高,因而在数据通路中采用了流水线技术以提高速度。此外,本系统中为图像存储采用了许多大容量高速FIFO,以达到减少地址线,简化控制的目的。 1.2 处理器芯片 为满足系统大数据量快速处理的要求,三款核心芯片均为最新高性能产品,其硬件方面的 储层微观孔隙结构研究进展 1.储层微观孔隙结构的影响因素和成因分析 储层微观孔隙结构受多因素影响,成因分析是储层孔隙结构研究的最基本的内容,它能帮助研究者从深层次准确把握储层孔隙结构的特征,受到研究者的高度重视。 1.1地质作用对储层微观孔隙结构的影响 储层物性受沉积作用、成岩作用、构造作用的共同控制。沉积作用对碎屑岩结构、分选、磨圆、杂基含量等起到明显的控制作用,不同的沉积环境对碳酸盐岩的结构组分影响很大。从沉积物脱离水环境之后,随着埋藏深度的不断加深,一系列的成岩作用使得储层物性进一步复杂化。一般而言,压实作用、压溶作用、胶结作用对储层物性起破坏性作用;交代作用、重结晶作用、溶蚀作用对储层物性起到建设性作用。而构造作用产生的裂缝等对物性的改造有较为显著地影响,使储层的非均质性更加明显,而这一点在碳酸盐岩储层中尤为突出。 1.2油气田开发对储层微观孔隙结构的影响 储层孔隙结构影响着储层的注采开发,同时,随着注水、压裂等一系列油气田开发增产措施的实施,储层孔隙结构也相应发生了变化。王美娜等研究了注水开发对胜坨油田坨断块沙二段储层性质的影响,发现注水开发一定程度上改善了储层孔隙结构。唐洪明等以辽河高升油田莲花油层为例,研究了蒸汽驱对储层孔隙结构和矿物组成的影响。结果表明,蒸汽驱导致储层孔隙度、孔隙直径增大,喉道半径、渗透率减小,增强了孔喉分布的非均质性。 2.储层微孔隙结构研究方法 2.1成岩作用方法 该方法通过对各种成岩作用在储层孔隙结构演化中的作用进行梳理,从而了解储层孔隙结构对应发生的变化。该方法的优点是对孔隙结构的成因可以有比较深入的认识,缺点是偏向于定性分析,难以有效的定量化表征。刘林玉等对白马南地区长砂岩成岩作用进行了分析,认为压实作用和胶结作用强烈地破坏了砂岩的原生孔隙结构,溶蚀作用和破裂作用则有效地改善了砂岩的孔隙结构。 2.2铸体薄片观察法 该方法是将带色的有机玻璃或环氧树脂注入岩石的储集空间中,待树脂凝固 三维曲线 plot3函数与plot函数用法十分相似,其调用格式为: plot3(x1,y1,z1,选项1,x2,y2,z2,选项2,…,xn,yn,zn,选项n) 其中每一组x,y,z组成一组曲线的坐标参数,选项的定义和plot函数相同。当x,y,z是同维向量时,则x,y,z 对应元素构成一条三维曲线。当x,y,z是同维矩阵时,则以x,y,z对应列元素绘制三维曲线,曲线条数等于矩阵列数。 例绘制三维曲线。 程序如下: t=0:pi/100:20*pi; x=sin(t); y=cos(t); z=t.*sin(t).*cos(t); plot3(x,y,z); title('Line in 3-D Space'); xlabel('X');ylabel('Y');zlabel('Z'); 三维曲面 1.产生三维数据 在MATLAB中,利用meshgrid函数产生平面区域内的网格坐标矩阵。其格式为: x=a:d1:b; y=c:d2:d; [X,Y]=meshgrid(x,y); 语句执行后,矩阵X的每一行都是向量x,行数等于向量y的元素的个数,矩阵Y的每一列都是向量y,列数等于向量x的元素的个数。 2.绘制三维曲面的函数 surf函数和mesh函数的调用格式为: mesh(x,y,z,c):画网格曲面,将数据点在空间中描出,并连成网格。 surf(x,y,z,c):画完整曲面,将数据点所表示曲面画出。 一般情况下,x,y,z是维数相同的矩阵。x,y是网格坐标矩阵,z是网格点上的高度矩阵,c 用于指定在不同高度下的颜色范围。 例绘制三维曲面图z=sin(x+sin(y))-x/10。 程序如下: [x,y]=meshgrid(0:0.25:4*pi); %在[0,4pi]×[0,4pi]区域生成网格坐标 z=sin(x+sin(y))-x/10; mesh(x,y,z); axis([0 4*pi 0 4*pi -2.5 1]); 此外,还有带等高线的三维网格曲面函数meshc和带底座的三维网格曲面函数meshz。其用法与mesh类似,不同的是meshc还在xy平面上绘制曲面在z轴方向的等高线,meshz还在xy平面上绘制曲面的底座。 例在xy平面内选择区域[-8,8]×[-8,8],绘制4种三维曲面图。 程序如下: [x,y]=meshgrid(-8:0.5:8); z=sin(sqrt(x.^2+y.^2))./sqrt(x.^2+y.^2+eps); subplot(2,2,1); mesh(x,y,z); title('mesh(x,y,z)') 关于三维目标识别的文献综述 前言: 随着计算机技术和现代信息处理技术的快速发展,目标识别已经迅速发展成为一种重要的工具与手段,目标识别是指一个特殊目标(或一种类型的目标)从其它目标(或其它类型的目标)中被区分出来的过程。它既包括两个非常相似目标的识别,也包括一种类型的目标同其他类型目标的识别。目标识别的基本原理是利用雷达回波中的幅度、相位、频谱和极化等目标特征信息,通过数学上的各种多维空间变换来估算目标的大小、形状、重量和表面层的物理特性参数,最后根据大量训练样本所确定的鉴别函数,在分类器中进行识别判决。它属于模式识别的范畴,也可以狭义的理解为图像识别。三维目标识别是以物体表面朝向的三维信息来识别完整的三维物体模型目标识别需要综合运用计算机科学、模式识别、机器视觉以及图像理解等学科知识。目标识别技术已广泛应用于国民经济、空间技术和国防等领域。 正文: 图像识别总的来说主要包括目标图像特征提取和分类两个方面。但是一般情况下,图像受各种因素影响,与真实物体有较大的差别,这样,就需要经过预处理、图像分割、特征提取、分析、匹配识别等一系列过程才能完成整个识别过程。 目前,最主流的三种三维物体识别研究思路是: 1)基于模型或几何的方法; 2)基于外观或视图的方法; 3)基于局部特征匹配的方法; 一、基于模型或几何的方法: 这种方法所识别的目标是已知的,原理就是利用传感器获得真实目标的三维信息并对信息进行分析处理,得到一种表面、边界及连接关系的描述,这里,三维物体识别中有两类最经常使用的传感器:灰度传感器和深度传感器,前者获取图像的每个像素点对应于一个亮度测量,而后者对应于从传感器到可视物体表面的距离;另一方面,利用CAD建立目标的几何模型,对模型的表面、边界及连接关系进行完整的描述。然后把这两种描述加以匹配就可以来识别三维物体。其流程如下图所示: 传感器数据获取过程,就是从现实生活中的真实物体中产生待识别的模型。分析/建模过程,是对传感器数据进行处理,从中提取与目标有关的独立应用特征。模型库的建立一般式在识别过程之前,即首先根据物体的某些特定特征建立一些关系以及将这些信息汇总成一个库。在模型匹配过程,系统通过从图像中抽取出的物体关系属性图,把物体描述与模型描述通过某种匹配算法进行比较、分析,最终得到与物体最相似的一种描述,从而确定物体的类型和空间位置。 基于模型的三维物体识别,需要着重解决以下4个问题: 实验报告 课程名称医学图像处理 实验名称图像分割 专业班级 姓名 学号 实验日期 实验地点 2015—2016学年度第 2 学期 050100150200250 图1 原图 3 阈值分割后的二值图像分析:手动阈值分割的阈值是取直方图中双峰的谷底的灰度值作为阈值,若有多个双峰谷底,则取第一个作为阈值。本题的阈值取 %例2 迭代阈值分割 f=imread('cameraman.tif'); %读入图像 subplot(1,2,1);imshow(f); %创建一个一行二列的窗口,在第一个窗口显示图像title('原始图像'); %标注标题 f=double(f); %转换位双精度 T=(min(f(:))+max(f(:)))/2; %设定初始阈值 done=false; %定义开关变量,用于控制循环次数 i=0; %迭代,初始值i=0 while~done %while ~done 是循环条件,~ 是“非”的意思,此 处done = 0; 说明是无限循环,循环体里面应该还 有循环退出条件,否则就循环到死了; r1=find(f<=T); %按前次结果对t进行二次分 r2=find(f>T); %按前次结果重新对t进行二次分 Tnew=(mean(f(r1))+mean(f(r2)))/2; %新阈值两个范围内像素平均值和的一半done=abs(Tnew-T)<1; %设定两次阈值的比较,当满足小于1时,停止循环, 1是自己指定的参数 T=Tnew; %把Tnw的值赋给T i=i+1; %执行循坏,每次都加1 end f(r1)=0; %把小于初始阈值的变成黑的 f(r2)=1; %把大于初始阈值的变成白的 subplot(1,2,2); %创建一个一行二列的窗口,在第二个窗口显示图像imshow(f); %显示图像 title('迭代阈值二值化图像'); %标注标题 图4原始图像图5迭代阈值二值化图像 分析:本题是迭代阈值二值化分割,步骤是:1.选定初始阈值,即原图大小取平均;2.用初阈值进行二值分割;3.目标灰度值平均背景都取平均;4.迭代生成阈值,直到两次阈值的灰 度变化不超过1,则稳定;5.输出迭代结果。 文献综述 1.1理论背景 数字图像中的边缘检测是图像分割、目标区域的识别、区域形状提取等图像分析领域的重要基础,图像处理和分析的第一步往往就是边缘检测。 物体的边缘是以图像的局部特征不连续的形式出现的,也就是指图像局部亮度变化最显著的部分,例如灰度值的突变、颜色的突变、纹理结构的突变等,同时物体的边缘也是不同区域的分界处。图像边缘有方向和幅度两个特性,通常沿边缘的走向灰度变化平缓,垂直于边缘走向的像素灰度变化剧烈。根据灰度变化的特点,图像边缘可分为阶跃型、房顶型和凸缘型。 1.2、图像边缘检测技术研究的目的和意义 数字图像边缘检测是伴随着计算机发展起来的一门新兴学科,随着计算机硬件、软件的高度发展,数字图像边缘检测也在生活中的各个领域得到了广泛的应用。边缘检测技术是图像边缘检测和计算机视觉等领域最基本的技术,如何快速、精确的提取图像边缘信息一直是国内外研究的热点,然而边缘检测也是图像处理中的一个难题。 首先要研究图像边缘检测,就要先研究图像去噪和图像锐化。前者是为了得到飞更真实的图像,排除外界的干扰,后者则是为我们的边缘检测提供图像特征更加明显的图片,即加大图像特征。两者虽然在图像边缘检测中都有重要地位,但本次研究主要是针对图像边缘检测的研究,我们最终所要达到的目的是为了处理速度更快,图像特征识别更准确。早期的经典算法有边缘算子法、曲面拟合法、模版匹配法、门限化法等。 早在1959年Julez就曾提及边缘检测技术,Roberts则于1965年开始了最早期的系统研究,从此有关边缘检测的理论方法不断涌现并推陈出新。边缘检测最开始都是使用一些经验性的方法,如利用梯度等微分算子或特征模板对图像进行卷积运算,然而由于这些方法普遍存在一些明显的缺陷,导致其检测结果并不 从平面到立体——三维图像获取技术及其应用 视觉与图像系统事业部金刚 1.二维图像与三维图像 我们生活在一个三维的立体世界中,而目前广泛应用、为人们熟知的“图像”实际是真实的三维世界在二维平面上的映射,这其中包含了大量的信息损失。随着现代计算机技术的飞速发展,计算机图形图象处理、辅助设计、多媒体技术越来越广泛深入地应用于工业、国防、医学、影视业、广告等各个领域,对“三维图像”的需求越来越大,人们经常需要能迅速地获得物体表面的立体信息和色彩信息,将其转变成计算机能直接处理的数据。工业界要求能快速地测量物体表面的三维坐标;影视界需要将演员道具等的立体色彩模型输入计算机,才能进行三维动画特技处理;游戏娱乐业需要在虚拟场景中放置逼真的三维彩色模型;整形外科专家需要知道人体骨骼、肢体的尺寸,以便于手术;科研工作者需要快速获得大量的三维数据,用于三维彩色图象信息处理、三维物体识别的研究……这些需求,都需要我们将传统的二维图像技术拓展到三维图像获取与处理。 三维图像,又被称为立体图像、深度图像、三维数字化模型,它与传统的平面图像有很大的区别。传统的平面图像可以看作是二维空间中的亮度分布,它是由真实三维世界在二维图像平面上投影而得到的。而三维图像,则包含了真实对象表面三维坐标和灰度(色彩)的完整信息,从中可以得到物体表面每个采样点的三维空间坐标。 图1 平面图像 图2 三维图像 2.常用的三维图像获取技术 获取真实对象的三维图像关键在于获取物体表面采样点的立体坐标,尤其是深度数据,相对于传统的镜头+相机装置,需要一些特殊的技术。实现这类功能的设备,有三维扫描仪(3D Scanner)、三维数字化仪(3D Digitizer)、深度传感器(Range Sensor)、自动抄数机、三维测量仪等多种名称。 三维图像获取技术多种多样,从应用目的来说,有单点三维坐标测量(测距)、面形测量(点云-3D 数字模型-CAD模型)、外表面完全测量(点云-3D 数字模型-CAD模型)、内部结构测 关于matlabb视频处理文献综述 前言 随着科学技术的发展,视频的应用越开越广泛,数字视频是在时间轴上的扩展,可以将视频的每一帧视为静止的图像。本文简要的介绍视频技术以及基于matlab的实时视频处理。 1视频的应用技术 视频是同时包涵了图像、声音、说明信息等内容的用来记录多媒体信息的重要载体。随着和互联网技术的日益发展,实时视频的数量也飞速的增长。伴随事实视频使用的增加,针对事实视频处理的相应技术也应运而生,而且日趋完善。所谓视频技术,就是利用人类的“视觉滞留”原理,将多幅画面以高于一定速度播放,就成了联系不断的视频图像。 1.1视频修复技术 视频修复是对视频损坏区域进行自动填充的技术,经过视频修复可以使原来损坏、缺失的区域得到填充,得到人们视觉可以接受的一致性结果。视频修复在影视作品制作的后处理、网络视频的修复以及老电影的修复等方面有师傅重要的意义。 1.2视频跟踪技术 实时视频实时视频处理技术一方面广泛应用于高速公路,治安卡口,十字路口等监控管理领域,对自动化和智能管理有着重要的作用;另一方面,随着机顶盒的问世和数字电视的推广,实时视频处理技术在该领域中也扮演了相当重要的角色。实时视频处理技术还可与计算机,因特网技术相结合,能够满足远程监控,远程医疗等要求,使其应用更加广泛,因而具有广阔的发展前景和巨大的市场容量。传统的监控装置功能单一,只能实时显示而不能实时处理,如发生突发事件只能通过事后处理视频录像来解决问题。实施视频处理装置解决了以上问题,视频图像局部实时无级缩放技术可对感兴趣的区域实时地进行无级缩放处理并显示,并且可以通过外部控制来指定感兴趣区域和缩放后的显示区域,这对反恐、刑侦、安防工作等都带来了极大的帮助。 基于Simpleware的图像处理及三维建模解决方案 一、概述 近年来随着3D影像技术的发展,基于图像数据的逆向建模方式,在各行各业应用得越来越广泛,尤其在医疗与工业领域,计算机数字模型研究方式已逐渐取代了传统的实物实验研究。在此背景下,图像处理就成为了逆向建模的关键环节,图像处理技术很大程度上决定了建模的最终效果。 二、当前图像处理的技术需求 目前基于图像的三维建模技术只能简单地体现处实物的形状,并不能完整地展现出实物的内部结构。而要获得物体内部结构数据,只能通过传统的物理实验方法获得。 行业需求: 研究真实的拓扑和内部结构 模拟真实情况,不仅仅是简化、理想化版本 三、图像处理及三维建模全球高端解决方Simpleware 基于上述图像处理的技术问题,如今中仿Simpleware软件已可以完全解决,它致力于为CAD、CAE以及3D打印领域提供世界领先的三维图像处理、分析以及建模和服务,已在世界范围内被业界广泛采用。2011年5月中仿科技应邀参加西安电子科大举办的中德先进图象处理技术研讨会,会议期间中仿科技公司为参会代表展示了中仿Simpleware软件的图像处理功能的优势与特点,并解答了参会代表提出的技术问题,得到了与会人员一致的认可。 Simpleware软件帮助您全面处理3D图像数据(MRI,CT,显微CT,FIB-SEM……),并导出适用于CAD、CAE、以及3D印刷的模型。使用图像处理模块(ScanIP)对数据进行可视化,分析,量化和处理,并输出模型或网格。 图3.1各种扫描设备 (一)软件图像处理模块(ScanIP)简介 ScanIP可以处理各种格式的二维和三维图像,如BMP、GIF、JPEG、PCX、PNG、XPM 等诸多图像格式。为用户提供了宽泛的选择。 ScanIP为3D图像数据的图像可视化、测量和处理工具提供了宽泛的选择。处理后的图像可导出为STL或点云文件,应用于CAD分析、求解、和3D打印领域。 ScanIP为3D图像数据(MIR,CT,micro-CT,FIB-SEM…)的综合处理提供了软件环境。软件为用户提供了功能强大的数据可视化、分析、分割、以及量化工具。 ScanIP易于学习和使用,内置视频录制功能,并能基于处理后的数据导出可用于CAD或3D打印的曲面模型/网格。附加模块可用于通过扫描数据导出CAE网格、整合图像数据、建模、导出NURBS曲面、计算有效材料属性的功能。 主要特征: 1、立体渲染 自动可视化背景数据 CPU 和GPU 能力 丰富的可选择预置值 创建独创的高品质图像quality images CT三维重建指南 1、脊柱重建: 腰椎: 西门子及GE图像均发送至西门子工作站,进入3D选项卡 A、椎体矢状位及冠状位: a. 选择骨窗薄层图像(西门子 1mm 70s;GE 0.625mm BONE),载入3D重建,调整定位线,使椎体冠状位、矢状位定位线与解剖位置一致,并将横断位定位线与两者垂直,将三幅图像模式改为MPR; b. 横断位作为定位相,做矢状位重建,打开定位线选项卡,点击垂直定位线,变换数字顺序,使其从右向左,选择层厚3mm,层间距3mm,方向平行于棘突-椎体轴线,两边范围包全椎体及横突根部(一般为19层),点击确定,保存; c. 矢状位作为定位相,打开曲面重建选项卡,沿各椎体中心弧度画定位相曲线,范围包全,双击结束,选择层厚3mm,层间距3mm,变换数字顺序,使其从前向后,范围前至椎体前缘,后至棘突根部(一般为19层),点击确定,保存。 B、椎间盘重建: a. 选择软组织窗薄层图像(西门子 1mm 30s;GE 0.625mm STND),载入3D重建,调整定位线,使椎体冠状位、矢状位定位线与解剖位置一致,并将横断位定位线与两者垂直,将三幅图像模式改为MPR; b. 矢状位作为定位相,做椎间盘重建,打开定位线选项卡,点击水平定位线,变换数字顺序,使其从上向下,选择层厚3mm,层间距3mm,层数5层,方向沿椎间隙走行方向,做L1/2-L5/S1椎间盘,注意右下角图像放大,逐个保存。 注意:脊柱侧弯患者,椎间盘重建过程中需不断调整冠状位定位相上矢状定位线(红色),使其保持与相应椎间隙垂直。 C、椎体横断位重建: 椎体骨质病变者,如压缩性骨折、骨转移、PVP术后等病人,加做椎体横断位重建,矢状位图像做定位相,沿病变椎体轴向,做横断位重建,注意重建图像放大,保存。 打片: 矢状位及冠状位二维一张:8×5;椎间盘一张:6×5; 若为椎体骨质病变者,椎间盘图像不打,打椎体横断位重建图像,共两张胶片。 三维图像重建 一、摘要: 物体的三维重建是指对三维物体建立适合计算机表示和处理的数学模型,是在计算机环境下对其进行处理,操作和分析其性质的基础,也是在计算机中建立表达客观世界的虚拟现实的关键技术. 计算机内生成物体三维表示主要有两类方法.一类是适用几何建模软件通过人机交互生成人为控制下的物体三维几何模型,另一类是通过一定的手段获取真实物体的几何形状.本文主要针对第二类方法进行介绍,结合三维重建在医学领域的广泛应用,对三维重建的每一个过程和其中的关键技术进行研究. 二、研究背景及发展现状 随着信息技术的飞速发展,如何在计算机上实时逼真地建立客观世界的虚拟海量信息 ,生成具有重要价值的三维形状信息,运用计算机的高效能数据存储\压缩\计算和传输能力,快速实现对这些三维信息的分析\挖掘\检索和高效利用,已成为国家和科技发展中许多重大应用需求的关键科学问题. 目前三维重建主要包含四类方式: 第一类是根据三维物体的断层扫描所得二维图像提取轮廓,然后根据一定的原则进行两个相邻轮廓的连接和三角化,从而得到物体的表面形状.该方法主要对于物体内部构造进行拓扑结构可视化,比如:医学影像的三维重建. 第二类是使用探针或激光读数仪逐点获取数据,然后进行整体三角化,此类方法测量精确,但速度很慢,难以在较短时间内获取大量数据. 第三类是基于双目视觉的重建方法,深度数据计算精度较低,主要应用于机器人视觉领域. 第四类是应用硬件光学三维扫描仪主动获取物体的点云数据,然后进行重建获取物体的整体表面信息. 目前三维重建的应用领域主要包括以下方面: (1)制造业与逆向工程 应用三维重建技术,可以将创作者完成的设计模型准确变为计算机中的三维实体模型,如果需要也可以在计算机中完成修正操作,最后由计算机根据实体模型数据控制加工设备完成部件加工,此过程省去了传统设计制作过程中若干复杂环节,大大节省开发 第13卷 第5期 太赫兹科学与电子信息学报Vo1.13,No.5 2015年10月 Journal of Terahertz Science and Electronic Information Technology Oct.,2015 文章编号:2095-4980(2015)05-0788-07 数字岩心重建与孔隙参数分析 吴运强1,赵增义1,王子强1,左琛2,滕奇志2 (1.中石油新疆油田分公司实验检测研究院,新疆维吾尔自治区克拉玛依 834000;2.四川大学电子信息学院,四川成都 610065) 摘要:针对岩心物性实验周期长且难以复现等问题,利用数字岩心图像分析技术进行岩心物性研究。以岩心铸体薄片图像为训练图像,根据模拟退火算法进行三维重建,获得岩心三维重 建图像。通过计算机断层扫描(CT)技术,获得同组岩心序列图像。在2种方式获得的图像中利用最 大球模型提取岩心孔隙结构,计算孔隙与喉道尺寸及分布,将结果与压汞法测定的岩心毛管分布 进行比较,分析了当前数字岩心技术与物性实验之间的区别与原因。结果表明,铸体薄片图像和 CT图像可以有效表征岩心大尺寸孔隙特征,但物性实验方法可以测定微小孔隙尺寸,由于成像设 备所限,数字岩心不能刻画该类孔隙特征。 关键词:三维重建;模拟退火算法;最大球模型;计算机断层扫描;岩心物性实验;岩心孔 隙结构 中图分类号:TN911.73 文献标识码:A doi:10.11805/TKYDA201505.0788 Reconstruction of digital core and analysis of pore parameters WU Yunqiang1,ZHAO Zengyi1,WANG Ziqiang1,ZUO Chen2,TENG Qizhi2 (1.Institute of Xinjiang Oilfield Detection,PetroChina,Kelamayi Xinjiang 834000,China; 2.College of Electronics and Information Engineering,Sichuan University,Chengdu Sichuan 610065,China) Abstract:Digital core image analysis technique is utilized in the core physical study in order to solve the problems such as time-consuming and difficult to reproduce of the core physical properties experiments. Taking the two-dimensional(2D) slices of the core as the training images, a three- dimensional(3D) image is reconstructed by the simulated annealing algorithm. A 2D image sequence of the same series is acquired by Computed Tomography(CT) technique. The pore structures are extracted from these two sets of images. Pore-throat sizes and their distribution are calculated by maximal balls model. By comparing the results with that of the mercury intrusion method experiments, distinctions and reasons between the current digital core analysis technique and traditional core physical properties experiments are analyzed.Results show that the large pores could be depicted in 2D slices and CT images. However, the core physical properties experiments are able to measure the size of micro pores, while the digital core reconstruction method could not due to the limitations of imaging equipments. Key words:three-dimensional reconstruction;simulated annealing algorithm;maximal balls model; Computed Tomography;core physical properties experiments;core pore structure 岩心物理特性实验,如压汞法测定毛管压力实验、稳态法测定油水相对渗透率实验等,都是研究储集层物理特性,特别是渗流特性的有效手段,但物理实验周期长、过程繁琐,同时也存在着实验结果难以复现等问题。近年来,数字岩心成为了热门研究课题。以几张岩心二维图像为训练图像,通过数学建模方法构建三维图像,分析储集层岩心物理特性。数字岩心分析方法运算周期短,可以重复多次对同一块岩心进行实验,且实验结果可以进行动态显示。 模拟退火重建[1-3]是构建数字岩心的经典算法,本文将岩心铸体薄片图像作为训练图像,利用模拟退火算法重建岩心三维结构。同时利用计算机断层扫描技术(CT),扫描同组岩心样本,获得序列图像。利用最大球模型[4]提取岩心二维图像和三维图像的拓扑结构,在链路的基础上划分孔隙与喉道,计算孔隙结构参数[5]。将得到的孔收稿日期:2014-10-21;修回日期:2014-12-09 基金项目:国家自然科学基金资助项目(No.61372174;60972130) 文献综述 理论背景 数字图像中的边缘检测是图像分割、目标区域的识别、区域形状提取等图像分析领域的重要基础,图像处理和分析的第一步往往就是边缘检测。 物体的边缘是以图像的局部特征不连续的形式出现的,也就是指图像局部亮度变化最显着的部分,例如灰度值的突变、颜色的突变、纹理结构的突变等,同时物体的边缘也是不同区域的分界处。图像边缘有方向和幅度两个特性,通常沿边缘的走向灰度变化平缓,垂直于边缘走向的像素灰度变化剧烈。根据灰度变化的特点,图像边缘可分为阶跃型、房顶型和凸缘型。 、图像边缘检测技术研究的目的和意义 数字图像边缘检测是伴随着计算机发展起来的一门新兴学科,随着计算机硬件、软件的高度发展,数字图像边缘检测也在生活中的各个领域得到了广泛的应用。边缘检测技术是图像边缘检测和计算机视觉等领域最基本的技术,如何快速、精确的提取图像边缘信息一直是国内外研究的热点,然而边缘检测也是图像处理中的一个难题。 首先要研究图像边缘检测,就要先研究图像去噪和图像锐化。前者是为了得到飞更真实的图像,排除外界的干扰,后者则是为我们的边缘检测提供图像特征更加明显的图片,即加大图像特征。两者虽然在图像边缘检测中都有重要地位,但本次研究主要是针对图像边缘检测的研究,我们最终所要达到的目的是为了处理速度更快,图像特征识别更准确。早期的经典算法有边缘算子法、曲面拟合法、模版匹配法、门限化法等。 早在1959年Julez就曾提及边缘检测技术,Roberts则于1965年开始了最早期的系统研究,从此有关边缘检测的理论方法不断涌现并推陈出新。边缘检测最开始都是使用一些经验性的方法,如利用梯度等微分算子或特征模板对图像进行卷积运算,然而由于这些方法普遍存在一些明显的缺陷,导致其检测结果并不尽如人意。20世纪80年代,Marr和Canny相继提出了一些更为系统的理论和方法,逐渐使人们认识到边缘检测的重要研究意义。随着研究的深入,人们开始注意到边缘具有多分辨性,即在不同的分辨率下需要提取的信息也是不同的。通常情况下,小尺度检测能得到更多的边缘细节,但对噪声更为敏感,而大尺度检测 文献综述 计算机科学与技术 基于GPU并行计算的图像二值化研究 引言: 图像是当今社会运用的越来越多的元素之一,不过是动画还是静态的图片都是图像的动静呈现,所以对图像的处理也就越来越得到人们的关注。图像重要性,图像处理就是在图像中得到可靠的信息。而图像的二值化处理也是当今正盛行的一种图像的处理方法,它把图像原始化,使得数据更加简单的表现。 本毕业设计是GPU与二值化的并行运算,这无疑就是一种加速算法,也就是讲在二值化处理本来就跟快的基础上,能够更快的读取图像中的信息,得到我们想要的数据。而现在最常用的一种加速算法就是CUDA算法,他的并行运算可以使得二值化运算提高几十倍,在图像处理中是一个很庞大的数据。CUDA的并行运算在处理小图像时并不能很明显的突出速度,但是当遇到有大量的图像需要处理,而且图像又很大的情况下,这种并行运算可以节省很多时间。 1图像处理简介 1.1图像处理的概念 图像处理一般指数字图像处理。数字图像是指用数字摄像机、扫描仪等设备经过采样和数字化得到的一个大的二维数组,该数组的元素称为像素,其值为一整数,称为灰度值。图像处理技术的主要内容包括图像压缩,增强和复原,匹配、描述和识别3个部分。 常见的处理有图像数字化、图像编码、图像增强、图像复原、图像分割和图像分析等。图像处理一般指数字图像处理。虽然某些处理也可以用光学方法或模拟技术实现,但它们远不及数字图像处理那样灵活和方便,因而数字图像处理成为图像处理的主要方面。 1.2 图像二值化技术的简介 首先,图像的二值化有利于图像的进一步处理,使图像变得简单,而且数据量减小,能凸显出感兴趣的目标的轮廓。其次,要进行二值图像的处理与分析,首先要把灰度图像二值化,得到二值化图像。所有灰度大于或等于阀值的像素被判定为属于特定物体,其灰度值为255表示,否则这些像素点被排除在物体区域以外,灰度值为0, Matlab绘制三维图形 三维曲线 plot3函数与plot函数用法十分相似,其调用格式为: plot3(x1,y1,z1,选项1,x2,y2,z2,选项2,…,xn,yn,zn,选项n) 其中每一组x,y,z组成一组曲线的坐标参数,选项的定义和plot函数相同。当x,y,z是同维向量时,则x,y,z 对应元素构成一条三维曲线。当x,y,z是同维矩阵时,则以x,y,z对应列元素绘制三维曲线,曲线条数等于矩阵列数。 例绘制三维曲线。 程序如下: t=0:pi/100:20*pi; x=sin(t); y=cos(t); z=t.*sin(t).*cos(t); plot3(x,y,z); title('Line in 3-D Space'); xlabel('X');ylabel('Y');zlabel('Z'); 三维曲面 1.产生三维数据 在MATLAB中,利用meshgrid函数产生平面区域内的网格坐标矩阵。其格式为: x=a:d1:b; y=c:d2:d; [X,Y]=meshgrid(x,y); 语句执行后,矩阵X的每一行都是向量x,行数等于向量y的元素的个数,矩阵Y的每一列都是向量y,列数等于向量x的元素的个数。 2.绘制三维曲面的函数 surf函数和mesh函数的调用格式为: mesh(x,y,z,c):画网格曲面,将数据点在空间中描出,并连成网格。 surf(x,y,z,c):画完整曲面,将数据点所表示曲面画出。 一般情况下,x,y,z是维数相同的矩阵。x,y是网格坐标矩阵,z是网格点上的高度矩阵,c 用于指定在不同高度下的颜色范围。 例绘制三维曲面图z=sin(x+sin(y))-x/10。 程序如下: [x,y]=meshgrid(0:0.25:4*pi); %在[0,4pi]×[0,4pi]区域生成网格坐标 z=sin(x+sin(y))-x/10; mesh(x,y,z); axis([0 4*pi 0 4*pi -2.5 1]); 此外,还有带等高线的三维网格曲面函数meshc和带底座的三维网格曲面函数meshz。其用法与mesh类似,不同的是meshc还在xy平面上绘制曲面在z轴方向的等高线,meshz还在xy平面上绘制曲面的底座。 例在xy平面内选择区域[-8,8]×[-8,8],绘制4种三维曲面图。 程序如下: [x,y]=meshgrid(-8:0.5:8); z=sin(sqrt(x.^2+y.^2))./sqrt(x.^2+y.^2+eps); subplot(2,2,1);图像三维重建技术
图像分割算法开题报告
三维图像处理系统组成及实现方案
储层微观孔隙结构研究
三维函数图像练习
关于三维图像目标识别文献综述
图像分割 实验报告
图像处理文献综述
三维图像获取
基于matlab的视频处理平台文献综述
基于Simpleware的图像处理及三维建模解决方案
CT三维重建的指南
三维图像重建结课报告
数字岩心重建与孔隙参数分析_吴运强
图像处理文献综述
基于GPU并行计算的图像二值化研究【文献综述】
matlab各种三维绘图及实例
相关主题
文本预览