第四章 交流电机绕组的基本理论 4.1交流绕组的基本要求 1. 电势和磁势波形接近正弦,各谐波分量要小。 2. 三相绕组基波电势、基波磁势对称。 3. 在导体数一定时,获得较大的基波电势和基波磁势。 4. 节省有效材料,绝缘性能好,机械强度高,散热条件好。 5. 制造工艺简单,检修方便。 a. 要获得正弦波电动势或磁动势,则根据e=blv, 只要磁场B 在空间按正弦规律分布,则它在交流绕组中感应的电动势就是随着时间按正弦规律变化。 b. 用槽电势星形图保证三相绕组基波电势、基波磁势对称 槽电势星形图: 把电枢上各槽内导体感应电势用矢量表示,构成的图。 概念:槽距角----相邻两个槽之间的自然(机械)角度,Z 360=α 槽距电角----用电角度来表示的相邻两个槽之间的角度,Z p 0 1360=α 电角度---是磁场所经历的角度。 c. 用600相带的绕组获得较大的基波电动势 相带:(1)360度的星形图圆周分成三等分,每等分占1200,成为120度相 带;这种分法简单,但电势相量分散,其相量和较小,获得的电动势较小。 (2)若分成六等分,则称600相带;这种分法同样可以保证电势对称, 且合成感应电动势较大,是常用的方法。 4.2三相单层绕组 特点:线圈数等于二分之一槽数;通常是整距绕组;嵌线方便;无层间绝缘;槽利用率高。 缺点:电势、磁势波形比双层绕组差。一般用于小型(10kW 以下)的异步电动机。 例题:一台交流电机定子槽数z=36, 极数2p=4,并联支路数a=1,绘制三相单层绕组展开图。 解: 步骤 1 绘制槽电势星形图 槽距电角Z p 0 1360=α=200, 槽电势星形图如上图 (注意:不是槽星形图,而是槽电势星形图) 步骤2 分相、构成线圈 每极每相槽数pm Z q 2= =36/4/3=3;每相在每个极下所占有的槽数。
第六章 交流异步电动机变压变频调速系统 本章主要问题: 1. 在变频调速中变频时为什么要保持压频比恒定? 2. 交-直-交电压源型变频器调压、调频的有哪几种电路结构,并说明各种电压结构的优缺点。 3. SPWM 控制的思想是什么? 4. 什么是1800导通型变频器?什么是1200导通型变频器? 5. 电压、频率协调控制有几种控制方式,各有哪些特点? 6. 在转速开环恒压频比控制系统中,绝对值单元GAB 的作用?函数发生器GFC 的作用?如 何控制转速正反转。 7. 总结恒11U 、恒1ωg E 、恒1ωr E 三种控制方式的特点。 ———————————————————————————————————————— §6-1 交流调速的基本类型 要求:掌握交流调速哪几种基本类型有以及各种调速方法的特点。 目的:能根据不同应用场合选择出相应的调速方式。 重点、难点:变频调速时基频以下和基频以上调速的特点 主要内容(交流调速的基本类型、变频调速的基本要求) 思考: 1. 交流异步电动机调速的方式有哪几种?并写出各方式的优缺点? 2. 在变频调速中变频时为什么要保持压频比恒定? 教学设计:交流调速的基本类型采用多媒体课件讲授,用大量的实例,说明几种类型的应用场合。 复习感应电动机转速表达式: )1(60)1(1 0s n f s n n p -= -= 异步电动机调速方法:?? ?? ??? ?????? ? ??型变频调速:绕线式、笼:绕线式串级调速(转差电压)电磁转差离合器调转子电阻:绕线式、调压(定子电压)变转差率调速变极调速:笼型异步机异步电动机 §6-2 变频调速的构成及基本要求 目的、教学要求:掌握变频调速时基频以下和基频以上调速的特点 重点、难点:变频调速时基频以下和基频以上调速的特点 主要内容(变频调速的基本要求)
第三篇交流电机绕组的基本理论 3.1 交流绕组与直流绕组的根本区别是什么? 3.2 何谓相带?在三相电机中为什么常用60°相带绕组而不用120°相带绕组? 3.3 双层绕组和单层绕组的最大并联支路数与极对数有什么关系? 3.4 试比较单层绕组和双层绕组的优缺点及它们的应用范围? 3.5 为什么采用短距和分布绕组能削弱谐波电动势?为了消除5次或7次谐波电动势,节距应选择多大?若要同时削弱5次和7次谐波电动势,节距应选择多大? 3.6 为什么对称三相绕组线电动势中不存在3及3的倍数次谐波?为什么同步发电机三相绕组多采用Y型接法而不采用Δ接法? 3.7 为什么说交流绕组产生的磁动势既是时间的函数,又是空间的函数,试以三相绕组合成磁动势的基波来说明。 3.8 脉振磁动势和旋转磁动势各有哪些基本特性?产生脉振磁动势、圆形旋转磁动势和椭圆形旋转磁动势的条件有什么不同? 3.9 把一台三相交流电机定子绕组的三个首端和三个末端分别连在一起,再通以交流电流,则合成磁动势基波是多少?如将三相绕组依次串联起来后通以交流电流,则合成磁动势基波又是多少?可能存在哪些谐波合成磁动势? 3.10 一台三角形联接的定子绕组,当绕组内有一相断线时,产生的磁动势是什么磁动势? 3.11 把三相感应电动机接到电源的三个接线头对调两根后,电动机的转向是否会改变?为什么? 3.12 试述三相绕组产生的高次谐波磁动势的极对数、转向、转速和幅值。它们所建立的磁场在定子绕组内的感应电动势的频率是多少? 3.13 短距系数和分布系数的物理意义是什么?试说明绕组系数在电动势和磁动势方面的统一性。 3.14 定子绕组磁场的转速与电流频率和极对数有什么关系?一台50Hz的三相电机,通入60Hz的三相对称电流,如电流的有效值不变,相序不变,试问三相合成磁动势基波的幅值、转速和转向是否会改变? 3.15 有一双层三相绕组,Z=24,2p=4,a=2,试绘出: (1)槽电动势星形图; (2)叠绕组展开图。 3.16 已知Z=24,2p=4,a=1,试绘制三相单层同心式绕组展开图。 3.17 一台三相同步发电机,f=50Hz,n N=1500r/min,定子采用双层短距分布绕组,q=3,y1/τ=8/9,每相串联匝数N=108,Y联接,每极磁通量Ф1=1.015×10-2Wb,Ф3=0.66×10-2Wb,Ф5=0.24×10-2Wb,Ф7=0.09×10-2Wb,试求: (1)电机的极数; (2)定子槽数; (3)绕组系数k N1、k N3、、k N5、k N7; (4)相电动势E1、E3、E5、E7及合成相电动势Eφ和线电动势E l。 3.18 一台汽轮发电机,2极,50Hz,定子54槽每槽内两根导体,a=1,y1=22槽,Y 联接。已知空载线电压U0=6300V,求每极基波磁通量Ф1。 3.19三相双层短距绕组,f=50Hz,2p=10,Z=180,y1=15,N c=3,a=1,每极基波磁通φ1=0.113Wb,磁通密度B=(sinθ+0.3sin3θ+0.2sin5θ)T,试求:
第六章控制电动机 6.1、有一台交流伺服电动机,若加上额定电压,电源频率为50Hz,极对数p=1,试问它 的理想空载转速是多少? 解:n0=60*f/p=60*50/1=3000r/min 6.2、何谓“自转”现象?交流伺服电动机是怎样克服这一现象,使其当控制信号消失时能 迅速停止? 答:自转是伺服电动机转动时控制电压取消,转子利用剩磁电压单相供电,转子继续转动。 克服这一现象方法是把伺服电动机的转子电阻设计的很大,使电动机在失去控制信号,即成单相运行时,正转矩或负转矩的最大值均出现在S m>1的地方。当速度n为正时,电磁转矩T为负,当n为负时,T为正,即去掉控制电压后,单相供电时的电磁转矩的方向总是与转子转向相反,所以是一个制动转矩。由于制动转矩的存在,可使转子迅速停止转动,不会存在自转现象。 6.3、有一台直流伺服电动机,电枢控制电压和励磁电压均保持不变,当负载增加时,电动 机的控制电流、电磁转矩和转速如何变化? 答:当负载增加时,电磁转矩增大;由n=U c/(K eΦ)-RT/(K e K tΦ2)可知,负载增大后,转速变慢。根据T= K tΦI a可知,控制电流增大。 6.4、有一台直流伺服电动机,当电枢控制电压U c=110V时,电枢电流I a1=0.05A,转速 n1=3000r/min;加负载后,电枢电流I a2=1A,转速n2=1500r/min。试作出其机械特性n=f(T)。 解:由电动机电压平衡方程式得: U c=E+I a R a=K eΦn+ I a R a
所以110=K e Φ×3000+0.05R a 110=K e Φ×1500+1×R a 解得:K e Φ=0.0357;R a =56.41Ω 所以T 1=K t ΦI a1=9.55 K e ΦI a1=9.55×0.0357×0.05=0.017N ·m T 2=K t ΦI a2=9.55 K e ΦI a2=9.55×0.0357×1=0.341N ·m 由(n=n 1=3000r/min ,T 1=0.017 N ·m )和(n=n 2=1500r/min ,T 2=0.341 N ·m )两点在n-T 特性表达式为 6.5、若直流伺服电动机的励磁电压一定,当电枢控制电压U c =100V 时,理想空载转速 n 0=3000r/min ;当U c =50V 时,n 0等于多少? 解:根据直流伺服电动机的机械特性公式可知n 0=U c /( K e Φ),所以理想空载转速与电枢控 制电压成正比。所以当U c =50V 时,理想空载转速n 0等于1500r/min 。 6.6、为什么直流力矩电动机要做成扁平圆盘状结构? 答:直流力矩电动机的电磁转矩为T=BI a NlD/2,在电枢体积相同的条件下,D 增大时,铁 心长度l 就应减小;其次,在相同电流I a 以及相同用铜量的条件下,电枢绕组的导线 3000 1500 0.017N ·m (0.05A) 0.341N ·m (1A)
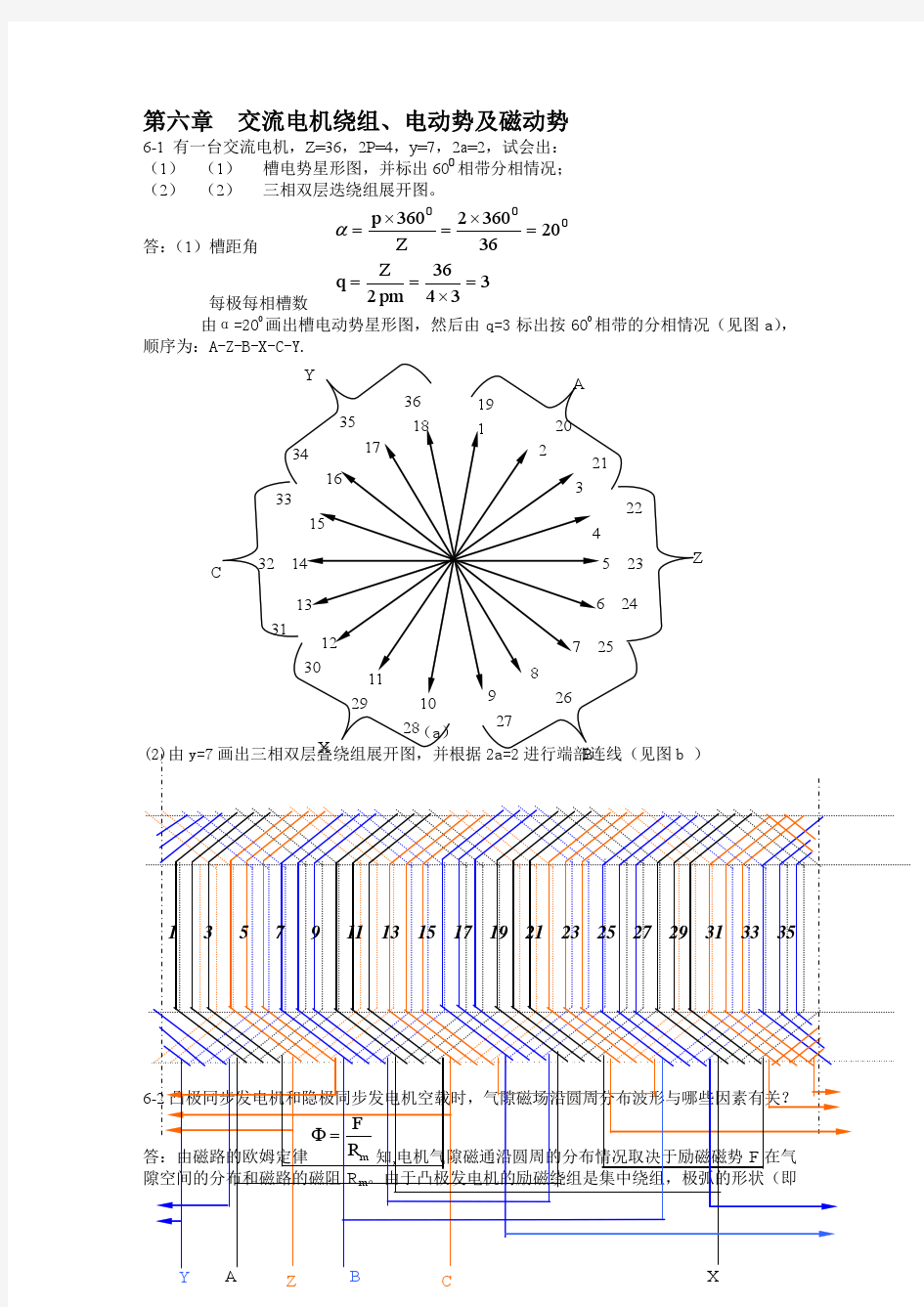
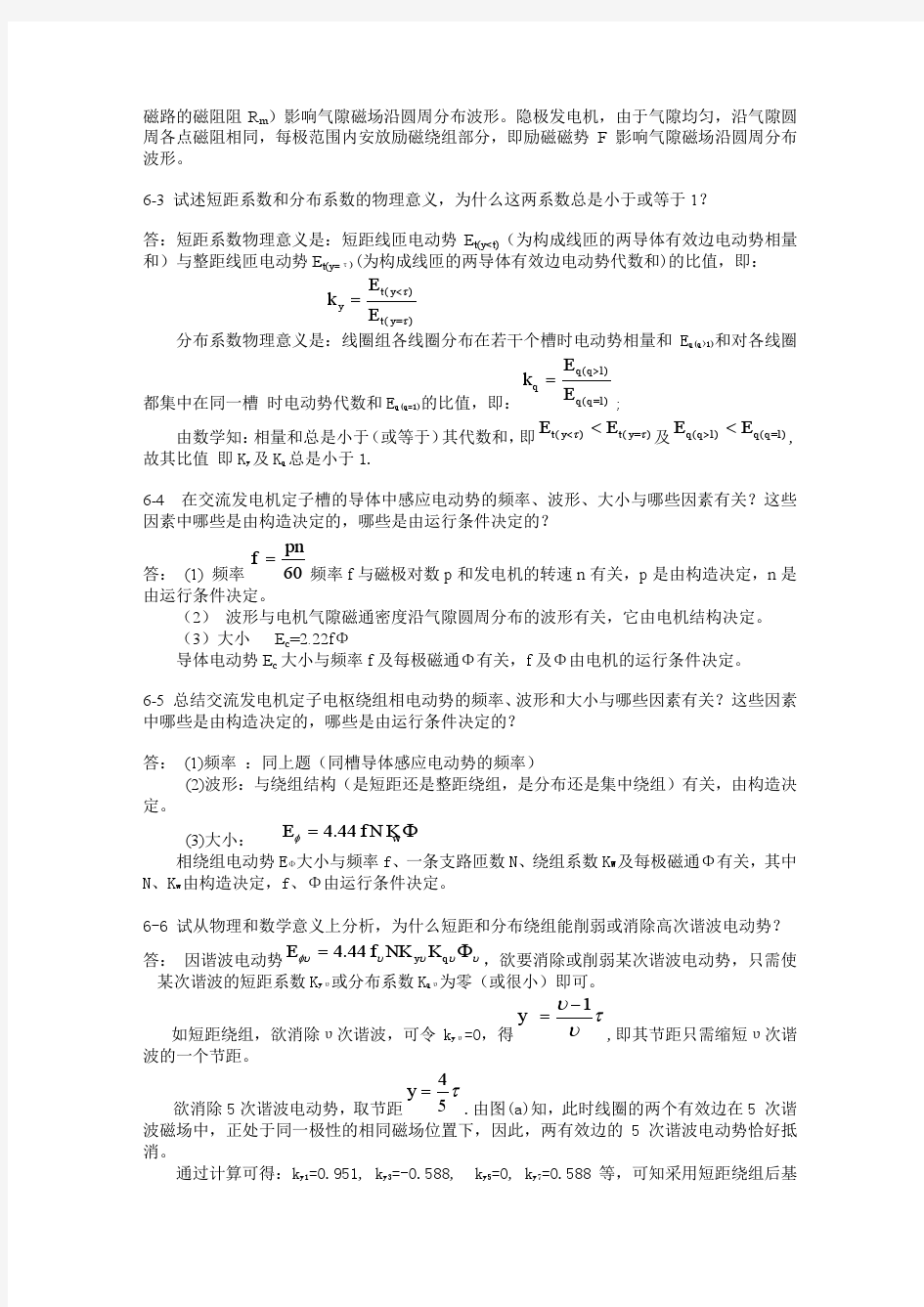
第六章交流电机绕组、电动势及磁动势6-1 有一台交流电机,Z=36,2P=4,y=7,2a=2,试会出:(1)(1)槽电势星形图,并标出600相带分相情况;(2)(2)三相双层迭绕组展开图。 答:(1)槽距角 20 36 360 2 360 = ? = ? = Z p α 每极每相槽数 3 3 4 36 2 = ? = = pm Z q 由α=200画出槽电动势星形图,然后由q=3标出按600相带的分相情况(见图a),顺序为:A-Z-B-X-C-Y. Z C
磁路的磁阻阻R m )影响气隙磁场沿圆周分布波形。隐极发电机,由于气隙均匀,沿气隙圆周各点磁阻相同,每极范围内安放励磁绕组部分,即励磁磁势F 影响气隙磁场沿圆周分布波形。 6-3 试述短距系数和分布系数的物理意义,为什么这两系数总是小于或等于1? 答:短距系数物理意义是:短距线匝电动势E t(y 电机绕组的基本参数及 常用名词术语 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】 电机绕组的基本参数及常用名词术语 一:绕组的基本参数 1.机械角度与电气角度 电机绕组分布铁心槽内时必须按一定规律嵌放与联接,才能输出对称的正弦交流电或产生旋转磁场。除与其它一些参数有关外,反映各线圈和绕组间相对位置的规律时,我们还要用到电气用度这个概念。从机械学中知道可以把圆等分成360°,这个360°就是平常所说的机械角度。而在电工学中计量电磁关系的角度单位则叫做电气角度,它是将正弦交流电的每一周在横坐标上等分为360°,也就是导体空间经过一对磁极时在电磁上相应变化了360°电气角度。因此,电气角度与机械角度在电机中的关系为:电气角度α=极对数xPx360°。 2.极距 绕组的极距是指每磁极所占铁心圆周表面的距离。一般常指电机铁心相邻两磁极中心所跨占的槽距,定子铁心以内圆气隙表面的槽距计算;转子则以铁心外圆气隙表面的槽距来计算。通常极距有两种表示方法,一种是以长度表示;另一种则以槽数表示,习惯上以槽数表示的较多。 3.节距 电机绕组每个线圈两元件边之间所跨占到的铁心槽数叫做节距,也称跨距。当线圈元件节距等于极距对称为全距绕组;线圈元件节距小于极距时则称短距绕组;而当线圈元件节距大于极距时则称长距绕组。由于短距绕组具有端部较短电磁线用料省和功率因数较高等许多优点,因而在应用较多的双层叠绕组中无一例外的都采用短距绕组。 4.绕组系数 绕组系数是指交流分布绕组的短距系数和分布系数的乘积,即5.槽距角 电机铁心两相邻槽之间的电气角度称为槽距角,通常用a表示,即6.相带 相带就是指每相绕组在每一个磁极所占的区域,通常用电气角度或槽数表示。如果将三相电机处在每一对磁极下的绕组分成六个区域则每极下三个。由于槽距角α=360°P/Z如该电机为4极24槽故每相每区域的宽度为qα=Z/6P*360P/Z=60°,按这样分布绕嵌的绕组就称为60°相带绕组。因60°连续相带绕组所具有明显优势,故在三相电机中绝大多数都采用这种绕组。 7.每极每相槽数 每极每相槽数是指每相绕组在每一个磁极所分占的槽数,每极每相绕组内应绕的线圈数就依据它确定。即 q=Z/2Pm Z:铁心槽数; 2P:电机极数; m电机相数。 8.每槽导体数 电机绕组的每槽导体数应为整数,双层绕组的每槽导体数还应为偶数整数。绕线转子绕组的每槽导体数由其开路电压确定,中型电机绕线转子的每槽导体数须等于2。定子绕组的每槽导体数可由下式计算: N S1=N Φ1 m1a1/Z1 N S1:定子绕组每槽导体数; N Φ1 :按气隙磁密计算的每槽导体数; 重庆大学 电机学(1)课堂测验三 2011~2012学年 第一学期 考试方式: 测验日期: 2011.12.16 时间: 45 分钟 题 号 一 二 三 四 五 六 七 八 九 十 总分 得 分 一、 单项选择题(每小题2分,共20分) 1.一个p 对极的三相交流线圈,两个有效边在空间的电角度为170°,则其 对应的机械电角度为 D 。 A .170°; B .p×170°; C .2p×170°; D .170°/p ; E .170°/2p 。 2.m 相交流绕组定子槽数为Q ,极对数为p ,则极距等于 B 。 A .Q /p ; B .Q/(2p); C .Q/(2pm); D .Q/(pm)。 3.交流绕组的基波绕组因数通常为 A 。 A .<1; B .>0; C .=1; D .>1。 4.m 相双层短矩分布交流绕组,其每相最大并联支路数为 D 。 A .p ; B .p×m ; C .2p/m ; D .2p 。 5.一个整距线圈产生的磁动势波形为 B 。 A .正弦波; B .矩形波; C .阶梯波; D .尖顶波。 6. 一个极相组线圈产生的基波合成磁动势波形为 A 。 A .正弦波; B .矩形波; C .阶梯波; D .尖顶波。 7.三相感应电动机2p=8,接到频率为50Hz 的电网上,定子三相对称电流 产生的基波合成磁动势转速为 B 。 A .600转/分; B .750转/分; C .1000转/分; D .1500转/分。 8.单相绕组通以单相正弦交流电流产生的基波磁动势为 B 。 A .恒定磁动势; B .脉振磁动势; C .圆形旋转磁动势; D .椭圆形旋转磁动势。 9.已知线圈的节距y 1=5τ/6,则该线圈的基波节距因数为 C 。 A .sin30°; B .sin45°; C .sin75°; D .sin90°; E .sin108°。 10.一台Y接法的三相感应电动机,定子绕组一相断线时,它所产生的基波 磁动势是 D 。 A .恒定磁动势; B .脉振磁动势; C .圆形旋转磁动势; D .椭圆形旋转磁动势。 二、 填空题(每空2分,共20分) 1.交流绕组构成的主要原则是使合成电动势的波形要接近于正弦形 ,幅值要 大 。 2.对于p 对极的整距交流线圈,其两个线圈边在空间相距的机械角度为 180°/p ,电角度为 180°。 3.在三相对称绕组中通入三相对称电流,产生的基波合成磁动势为 圆形旋转磁动势 ,其幅值取决于 绕组设计和电流大小 ,转速取决于 电流频率和极对数 ,转向取决于 电流相序和绕组布置 。 4.一个脉振磁动势可以分解为两个 圆形旋转 磁动势,它们的旋转方向 相反 ,幅值是脉振磁动势最大幅值的 1/2 。 5.单相绕组基波磁动势的幅值为 0.9Nk w1I φ/p ;在空间上按 余弦 规律分布, 其轴线位置固定不动,脉振的频率为电流的频率。 6.基波绕组因数的物理意义是既考虑绕组短距、又考虑绕组分布时,整个绕组的合成电动势所须的总折扣。 7.变压器相绕组的电动势计算公式为E φ=4.44fN 1φm ,交流旋转电机单相绕组的电动势计算公式为E φ=4.44fN k w1φ1,两者的主要差别在变压器中N 1表示一相绕组的实际匝数,交流电机N k w1表示一相绕组的等效匝数 和变压器φm 表示主磁通幅值,交流电机φ1表示每极磁通量。 三、 简答题(每小题12分,共24分) 1.一台频率为50Hz 的三相交流电机,通入频率为60Hz 的三相对称电流,如电流的有效值不变、相序不变,试问三相合成基波磁动势的幅值、转速和转向是否会改变?试说明原因。(12分) 答: (1) 三相合成磁动势基波幅值 1 1 1.35 w Nk F I p φ= I φ不变,故三相合成磁动势基波幅值F 1不变。 (2) 转速 学院 电气工程学院 专业、班 年级 2009 学号 姓名 公平竞争、诚实守信、严肃考纪、拒绝作弊 封 线 密 第四章 交流绕组的共同问题 一、填空 1. 一台50Hz 的三相电机通以60 Hz 的三相对称电流,并保持电流有效值不变,此时三相基波合成旋转磁势的幅值大小 ,转速 ,极数 。答:不变,变大,不变。 2. ★单相绕组的基波磁势是 ,它可以分解成大小 ,转向 ,转速 的两个旋转磁势。答:脉振磁势,相等,相反,相等。 3. 有一个三相双层叠绕组,2p=4, Q=36, 支路数a=1,那么极距τ = 槽,每极每相槽数q= ,槽距角α= ,分布 因数1d k = ,1 8y =,节距因数1p k = ,绕组因数1w k = 。答:9,3,20°,0.96,0.98,0.94 4. ★若消除相电势中 ν 次谐波,在采用短距方法中,节距 1y = τ 。答:ν ν1- 5. ★三相对称绕组通过三相对称电流,顺时针相序(a-b-c-a ),其中t i a ωsin 10=,当Ia=10A 时,三相基波合成磁势的幅 值应位于 ;当Ia =-5A 时,其幅值位于 。答:A 相绕组轴线处,B 相绕组轴线处。 6. ★将一台三相交流电机的三相绕组串联起来,通交流电,则合成磁势为 。答:脉振磁势。 7. ★对称交流绕组通以正弦交流电时,υ次谐波磁势的转速为 。答: ν s n 8. 三相合成磁动势中的五次空间磁势谐波,在气隙空间以 基波旋转磁动势的转速旋转,转向与基波转向 ,在定子绕组中,感应电势的频率为 ,要消除它定子绕组节距 1y = 。答:1/5,相反,f 1 ,4 5 τ 9. ★★设基波极距为τ,基波电势频率为f ,则同步电机转子磁极磁场的3次谐波极距为 ;在电枢绕组中所感应的电势频率为 ;如3次谐波相电势有效值为E 3,则线电势有效值为 ;同步电机三相电枢绕组中一相单独流过电流时,所产生的3次谐波磁势表达式为 。三相绕组流过对称三相电流时3次谐波磁势幅值为 。答: 3 τ ,3f,0,3 F cos 3 cos x t φπ ωτ ,0 10. ★某三相两极电机中,有一个表达式为δ=F COS (5ωt+ 7θS )的气隙磁势波,这表明:产生该磁势波的电流频率为基波电流频率的 倍;该磁势的极对数为 ;在空间的转速为 ;在电枢绕组中所感应的电势的频 率为 。答:5,7p, s n 7 5 ,15f 二、选择填空 1. 当采用绕组短距的方式同时削弱定子绕组中五次和七次谐波磁势时,应选绕组节距为 。 A : τ B :4τ/5 C :6τ/7 D :5τ /6答:D 2. ★三相对称交流绕组的合成基波空间磁势幅值为F 1,绕组系数为 k w1,3次谐波绕组系数为k w3,则3次空间磁势波的合成幅值为 。 A:0; B:131/3 1w w k k F ; C:131/w w k k F 答:A 3. 三相四极36槽交流绕组,若希望尽可能削弱5次空间磁势谐波,绕组节距取 。 电机绕组的基本参数及常用名词术语 一:绕组的基本参数 1.机械角度与电气角度 电机绕组分布铁心槽内时必须按一定规律嵌放与联接,才能输出对称的正弦交流 电或产生旋转磁场。除与其它一些参数有关外,反映各线圈和绕组间相对位置的规律时,我们还要用到电气用度这个概念。从机械学中知道可以把圆等分成360°,这个360°就是平常所说的机械角度。而在电工学中计量电磁关系的角度单位则叫做电气 角度,它是将正弦交流电的每一周在横坐标上等分为360°,也就是导体空间经过一对磁极时在电磁上相应变化了360°电气角度。因此,电气角度与机械角度在电机中的 关系为:电气角度α=极对数xPx360°。 2.极距 绕组的极距是指每磁极所占铁心圆周表面的距离。一般常指电机铁心相邻两磁极 中心所跨占的槽距,定子铁心以内圆气隙表面的槽距计算;转子则以铁心外圆气隙表 面的槽距来计算。通常极距有两种表示方法,一种是以长度表示;另一种则以槽数表示,习惯上以槽数表示的较多。 3.节距 电机绕组每个线圈两元件边之间所跨占到的铁心槽数叫做节距,也称跨距。当线 圈元件节距等于极距对称为全距绕组;线圈元件节距小于极距时则称短距绕组;而当 线圈元件节距大于极距时则称长距绕组。由于短距绕组具有端部较短电磁线用料省和 功率因数较高等许多优点,因而在应用较多的双层叠绕组中无一例外的都采用短距绕组。 4.绕组系数 绕组系数是指交流分布绕组的短距系数和分布系数的乘积,即 5.槽距角 电机铁心两相邻槽之间的电气角度称为槽距角,通常用a表示,即6.相带 相带就是指每相绕组在每一个磁极所占的区域,通常用电气角度或槽数表示。 如果将三相电机处在每一对磁极下的绕组分成六个区域则每极下三个。由于槽距角α=360°P/Z如该电机为4极24槽故每相每区域的宽度为qα=Z/6P*360P/Z=60°,按这样分布绕嵌的绕组就称为60°相带绕组。因60°连续相带绕组所具有明显优势, 故在三相电机中绝大多数都采用这种绕组。 7.每极每相槽数 每极每相槽数是指每相绕组在每一个磁极所分占的槽数,每极每相绕组内应 绕的线圈数就依据它确定。即 q=Z/2Pm Z:铁心槽数; 2P:电机极数; m电机相数。 8.每槽导体数 电机绕组的每槽导体数应为整数,双层绕组的每槽导体数还应为偶数整数。 绕线转子绕组的每槽导体数由其开路电压确定,中型电机绕线转子的每槽导体数须等 于2。定子绕组的每槽导体数可由下式计算: N S1=NΦ1m1a1/Z1 N S1:定子绕组每槽导体数; NΦ1:按气隙磁密计算的每槽导体数; m1:定子绕组相数; a1:定子绕组并联支路数; Z1:定子槽数。 9.每相串联导体数 每相串联导体数是指电机内每相绕组串联的总线匝数。不过该串联总线匝数 与每相绕组内的并联支路数有关,如电机的并联支路数为1路接法,那么该电机各极下线圈所有串联线匝数均应相加而成为相绕组的总线匝数。如电机的每相绕组内有多 1、如下图所示电路,为电动机自锁连续控制和点动控制局部电路,当按下______可实现______控制。 A.SB2/自锁连续控制 B.SB2/点动控制 C.SB1/点动控制 D.SB3/自锁连续控制 2、如图,为电动机的控制线路局部,KM为控制该电动机的接触器,则此电路可实现______。 A.点动控制 B.自锁控制 C.互锁控制 D.连续运转控制 3、如图所示,下列______原因会使电动机在合上QS后便转动,按下SB1后停机,松手后电机又转动。 A.将KM常开辅助触头误接成常闭辅助触头 B.SB2故障,粘牢导通,断不开 C.将SB1和SB2位置互换 D.将KM常开辅助触头误接成常闭辅助触头和SB2粘牢导通,断不开同时存在 4、如图所示,如果将KM的常开辅助触点一端由b接至a,则会出现______。A.电机仍能正常起动、停机 B.电机不能起动 C.不能进行点动 D.按下SB2电机可起动,但按下SB1不能停机 5、如图所示,如果在接线时误把双层按钮的常开和常闭触点互换,则会出现______。 A.合上QS三相电源开关后,电机立即转动起来 B.合上QS三相电源开关后,FU4、FU5烧断 C.合上QS三相电源开关后,按下SB2电机不动 D.合上QS三相电源开关后,热继电器动作,电机不转 6、如图所示,如果将KM的常开辅助触头误接成常闭辅助触头,则会出现______。A.合上QS三相电源开关后,FU4、FU5烧断 B.合上QS三相电源开关后电机立即转动起来 C.合上QS三相电源开关后,接触器线圈反复有电、断电,致使电机不能转起来D.合上QS三相电源开关后,电机只能点动,不能连续运转 7、如图所示,为三相异步电动机磁力起动器控制电路,若仅将SB1和SB2的位置调换接入电路,其他未变,则______。 A.合上QS三相电源开关后,电机立即转动起来 B.SB1与SB2的起停功能交换了 第六章 6.1 有一台交流伺服电动机,若加上额定电压,电源频率为50Hz,极对数P=1,试问它的理 想空在转速是多少? n0=60*f/p =60*50/1 =3000r/min 理想空在转速是3000 r/min 6.2何谓“自转”现象?交流伺服电动机时怎样克服这一现象,使其当控制信号消失时能迅 速停止? 自转是伺服电动机转动时控制电压取消,转子利用剩磁电压单相供电,转子继续转动. 克服这一现象方法是把伺服电动机的转子电阻设计的很大,使电动机在失去控制信号,即成单相运行时,正转矩或负转矩的最大值均出现在Sm>1的地方.当速度n 为正时,电磁转矩T为负,当n为负时,T为正,即去掉控制电压后,单相供电似的电磁转矩的方向总是与转子转向相反,所以是一个制动转矩.可使转子迅速停止不会存在自转现象 6.3有一台直流伺服电动机,电枢控制电压和励磁电压均保持不变,当负载增加时,电动机 的控制电流、电磁转矩和转速如何变化? 当副在增加时, n=U c/K eΦ-RT/K e K tΦ2电磁转矩增大,转速变慢,根据n=U c/K eΦ-R a I a/K e Φ控制电流增大. 6.4有一台直流伺服电动机,当电枢控制电压Uc=110V时,电枢电流I a1=0.05A,转速 n1=3000r/min;加负载后,电枢电流I a2=1A, 转速n2=1500r/min。试做出其机械特性n=f (T)。 电动机的电磁转矩为T=BI a NLD/2, n 3000 1500 0.05A 6.5 n0=3000r/min;当 n0=120Uc/πNBLD 6.6 细不变,式中的BI a Nl/2紧思维常数,故转矩T与直径D近似成正比.电动机得直径越大力矩就越大. 6.7 为什么多数数控机床的进给系统宜采用大惯量直流电动机? 因为在设计.制造商保证了电动机能造低速或阻转下运行,在阻转的情况下,能产生足够大的力矩而不损坏,加上他精度高,反应快,速度快线性好等优点.因此它常用在低俗,需要转矩调节和需要一定张力的随动系统中作为执行元件. 6.8 永磁式同步电动机为什么要采用异步启动? 因为永磁式同步驶电动机刚启动时,器定子长生旋转磁场,但转子具有惯性,跟不上磁场的转动,定子旋转时而吸引转子,时而又排斥转子,因此作用在转子的平均转矩为零,转子也就旋转不起来了. 6.9 磁阻式电磁减速同步电动机有什么突出的优点?电机绕组的基本参数及常用名词术语
电机学考试资料真题4(交流电机理论的共同问题含答案)
电机学第四章 交流绕组共同问题
电机绕组的基本参数及常用名词术语(20200422094453)
第六章第三节三相异步电动机的各种控制电路
机电传动与控制(第四版)第6章课后习题参考答案
相关主题
文本预览