affine invariant comparison of point-sets using convex hulls and hausdorff distances
- 格式:pdf
- 大小:347.94 KB
- 文档页数:12


2024年3月第39卷第2期西安石油大学学报(自然科学版)JournalofXi’anShiyouUniversity(NaturalScienceEdition)Mar.2024Vol.39No.2收稿日期:2023 06 03基金项目:国家自然科学基金面上项目“基于频变信息的流体识别及流体可动性预测”(41774142);四川省重点研发项目“工业互联网安全与智能管理平台关键技术研究与应用”(2023YFG0112);四川省自然科学基金资助项目“基于超分辨感知方法的密集神经图像分割”(2022NSFSC0964)第一作者:曹凯奇(1998 ),男,硕士,研究方向:遥感图像标注。
E mail:819088338@qq.com通讯作者:文武(1979 ),男,博士,研究方向:人工智能在地球科学的应用、高性能计算。
E mail:wenwu@cuit.edu.cnDOI:10.3969/j.issn.1673 064X.2024.02.016中图分类号:TE19文章编号:1673 064X(2024)02 0128 15文献标识码:A基于改进DeepLabV3+的引导式道路提取方法及在震源点位优化中的应用曹凯奇1,张凌浩2,徐虹1,吴蔚3,文武1,周航1(1.成都信息工程大学计算机学院,四川成都610225;2.国网四川省电力公司电力科学研究院,四川成都610094;3.中国石油集团东方地球物理勘探有限责任公司采集技术中心,河北涿州072750)摘要:为解决自动识别方法在道路提取时存在漏提、错提现象,提出一种引导式道路提取方法提高修正效率。
在DeepLabV3+原有输入通道(3通道)的基础上添加额外输入通道(第4通道),将道路的4个极点转化为二维高斯热图后作为额外通道输入网络,网络以极点作为引导信号,使网络适用于引导式道路提取任务;设计并行多分支模块,提取上下文信息,增强网络特征提取能力;融合类均衡二值交叉熵和骰子系数组成新的复合损失函数进行训练缓解正负样本不均衡问题。
庞加莱猜想-前言Wir m\"ussen wissen! Wir werden wissen!(我们必须知道!我们必将知道!)—— David Hilbert两年前科学版举行过一次版聚,我报告了低维拓扑里面的一些问题和进展,其中有一半篇幅是关于Poincar\'e 猜想。
版聚后,flyleaf 要求大家回去后把自己所讲的内容发在版上。
当时我甚至已经开始写了一两段,但后来又搁置了。
主要是因为自己对于低维拓扑还是一个门外汉,写出来的东西难免有疏漏之处,不敢妄下笔。
两年过去,我对低维拓扑这门学科的了解比原先多了,说话的底气也就比原先足了。
另外,由于Clay 研究所的百万巨赏,近年来Poincar\'e 猜想频频在媒体上曝光;而且Perelman 最近的工作使数学家们有理由相信我们已经充分接近于这一猜想的最后解决。
所以大概会有很多人对Poincar\'e 猜想的来龙去脉感兴趣,我也好借机一偿两年来的宿愿。
现代科学的高速发展使各学科之间的鸿沟加大,不同学科之间难以互相理解,所以非数学专业的读者在阅读本文时可能会遇到一些困难。
但限于篇幅和文章的形式,我也不可能对很多东西详细解释。
一些最基本的拓扑概念如“流形”,我将在本文的附录中解释。
还有一些“同调群”、“基本群”之类的名词,读者见到时大可不去理会它们的确切含义。
我将尽量避免使用这一类的专业术语。
作者并非拓扑方面的专家,对下面要说的很多内容都是道听途说,只知其然而不知其所以然;作者更不善于写作,写出来的东东总会枯燥无味,难登大雅之堂。
凡此种种,还请读者诸君海涵。
问题的由来Consid\'erons maintenant une vari\'et\'e [ferm\'ee] $V$ \`a trois dimensions ... Est-il possible que le groupe fondamental de $V$ ser\'eduise \`a la substitution identique, et que pourtant $V$ ne soit pas simplement connexe?—— Henri Poincar\'e在拓扑学家的眼里,篮球、排球和乒乓球并没有什么不同,它们都同胚于三维空间中的球面S^2. (我们把n+1维欧氏空间中到原点距离为1的点的集合记作S^n,称为n维球面(sphere)。

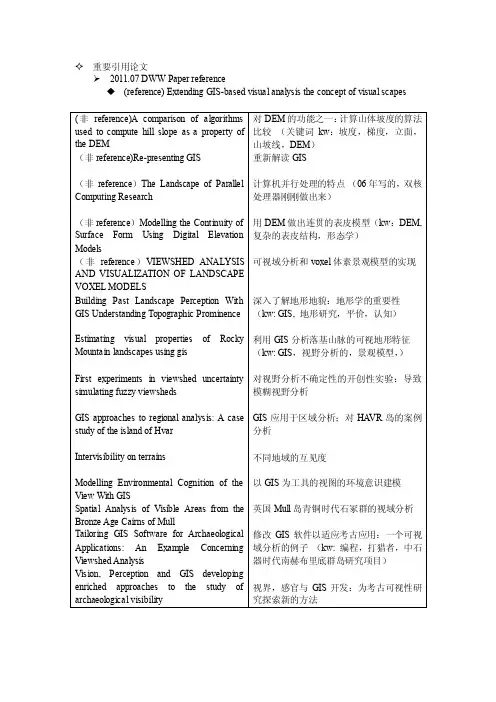
✧重要引用论文2011.07 DWW Paper reference◆(reference) Extending GIS-based visual analysis the concept of visual scapes(非reference)A comparison of algorithms used to compute hill slope as a property of the DEM(非reference)Re-presenting GIS(非reference)The Landscape of Parallel Computing Research(非reference)Modelling the Continuity of Surface Form Using Digital Elevation Models(非reference)VIEWSHED ANALYSIS AND VISUALIZA TION OF LANDSCAPE VOXEL MODELSBuilding Past Landscape Perception With GIS Understanding Topographic ProminenceEstimating visual properties of Rocky Mountain landscapes using gisFirst experiments in viewshed uncertainty simulating fuzzy viewshedsGIS approaches to regional analysis: A case study of the island of HvarIntervisibility on terrainsModelling Environmental Cognition of the View With GISSpatial Analysis of Visible Areas from the Bronze Age Cairns of MullTailoring GIS Software for Archaeological Applications: An Example Concerning Viewshed AnalysisVision, Perception and GIS developing enriched approaches to the study of archaeological visibility 对DEM的功能之一:计算山体坡度的算法比较(关键词kw:坡度,梯度,立面,山坡线,DEM)重新解读GIS计算机并行处理的特点(06年写的,双核处理器刚刚做出来)用DEM做出连贯的表皮模型(kw:DEM, 复杂的表皮结构,形态学)可视域分析和voxel体素景观模型的实现深入了解地形地貌:地形学的重要性(kw: GIS, 地形研究,平价,认知)利用GIS分析落基山脉的可视地形特征(kw: GIS,视野分析的,景观模型,)对视野分析不确定性的开创性实验:导致模糊视野分析GIS应用于区域分析;对HA VR岛的案例分析不同地域的互见度以GIS为工具的视图的环境意识建模英国Mull岛青铜时代石冢群的视域分析修改GIS软件以适应考古应用:一个可视域分析的例子(kw: 编程,打猎者,中石器时代南赫布里底群岛研究项目)视界,感官与GIS开发:为考古可视性研究探索新的方法◆(reference) Viewsphere a GIS-based 3D visibility analysis(非reference)a method for estimating changes in the visibility of land cover(非reference)Analysing Mental Geography of Residential Environment in Singapore using GIS-based 3D Visibility AnalysisA 3D-GIS EXTENSION FOR SKY VIEW FACTORS ASSESSMENT IN URBAN ENVIRONMENTGeographic Information Systems and ScienceSpace is the Machine A Configurational Theory of ArchitectureStreet Design and Urban Canopy Layer Climateusing arcgis 3d analysis(说明书) 估量土地覆盖可视化的变化的一个方法(kw: 视觉资源,视觉影响,空间分析)应用三维可视性分析方法分析新加坡居民对其居住环境的感知(空间感知,环境光阵,公众住房)拓展三维GIS以评估城市环境中影响天空视角的因素地理信息系统和科学空间一种机器:建筑学的构造理论街道设计和城市上空表层气候三维曲线GIS 使用分析◆Benedikt M.L.-To take hold of space: isovists and isovist fields对空间的有效利用Isovist: 从空间中某一点所能看到的一组点点和他们与环境的关系Isovist fields:视区?◆Extending GIS-based visual analysis the concept of visualscapes 对基于GIS的视觉分析的延展:“可视景观”概念的提出◆Perry Pei-Ju Y ang_Viewsphere a GIS-based 3D visibility analysis for urbandesign evaluation视觉球体:基于GIS的用于城市设计评估的三维可视性分析WebA Tour through the Visualization ZooHome §Center for Geographic Analysis, Harvard UniversityMIT SENSEable City LabPicturing Usenet:Mapping Computer-Mediated Collective ActionProfessor Howard T aylor Fisher 穿过想象的世界(把想象形象化,很混乱)哈佛大学地理分析主页和中心麻省理工可感知的城市实验室刻画用户交流网:绘制以计算机为媒介的群体活动Howard T aylor Fisher教授的简介Visualization (computer graphics) - wiki 可视化(电脑制图学)--维基百科✧AlgorithmAlgorithms for the Automatic Generation of Urban Streets and Buildings自动生成城市街道和建筑的算法✧Fractal-techAssessing urban character: the use of fractal analysis of street edgesFractal analysis of street vistas: a potential tool for assessing levels of visual variety in everyday street scenespdf名:Pierre F_2004Cost10fractales Comparing the morphology of urban patterns in Europe –a fractal approach Fractals, skylines, nature and beauty 分析城市特征:街道边缘的分形分析街道深景的分形分析:衡量日常街道场景的不同可视程度的一个可能的工具比较欧洲城市布局的形态学-- 一个分形分析方法分形,天际线,自然,美观✧GIS-Viewshed (Gis可视域)Exploring multiple viewshed analysis using terrain features and optimisation techniquesViewshed characteristics of urban pedestrian trails, Indianapolis, Indiana, USA 利用地区特征和优化技术探索多种可视域分析方法城市人行道的可视域特征,印第安纳波利斯,印第安纳,美国✧Mapping-tech (绘图技术)Eidetic Operations and New LandscapesPdf名:ackerson_thesisA GIS Approach to Evaluating Streetscape and Neighborhood Walkabilitycorner_agency_of_mapping:Pdf名字:papers_longpapers_004 - Peponis Allen French Scoppa BrownSTREET CONNECTIVITY AND URBAN 逼真的操作及新的景观学用GIS的方法衡量街景和住宅区的行走便利程度绘图的作用:猜想,批判和探索(XXX和XXX的长篇论文)街道连接和城市密度:空间测量方法和他DENSITY: spatial measures and their correlationSergio--Linking urban design to sustainability: formal indicators of social urban sustainability field research in Perth, Western AustraliaSpatial Metrics and Image Texture for Mapping Urban Land Use 们的相互关系Sergio写的-- 结合城市设计与可持续发展:社会城市可持续发展的布局整齐的指示物,对西奥地利波斯的实地考察空间度量学和图像结构绘制城市用地图✧Rast- DIM-tech (光栅DIM技术)21st Century Milan: using new image processing techniques to assess the environmental quality of the Milan Trade Fair masterplanRaster analysis of urban formRaster analysis of urban formThe lineage of the line: space syntax parameters from the analysis of urban DEMsTucker C_etc_2005Spatial configuration within residential facadesUrban Texture Analysis with Image Processing TechniquesURBAN TEXTURE ANAL YSIS 二十一世纪的米兰:利用新的图像处理技术评估米兰商品交易会的总平面图的环境质量城市形式的光栅分析同上线条的来源:城市dem(数字高程模型)分析而得出的空间句法的限定性因素住宅正面的空间构造利用图像处理技术分析城市结构城市结构分析✧SOI-IsovistA digital image of the city-3D isovists in Lynch's urban analysisBatty M._Exploring isovist fields: space and shape in architectural and urban morphologyBenedikt M.L.-To take hold of space isovists Lynch城市分析的三维城市视区电子图像探索“视区”:建筑和城市形态学里的空间和形状掌握空间视点和视区and isovist fieldsDafna Fisher-Gewirtzman Spatial openness as a practical metric for evaluating built-up environmentsDafna Fisher-Gewirtzman_A 3-D visual method for comparative evaluation of dense built-up environmentsDafna Fisher-Gewirtzman_Spatial openness as a practical metric for evaluating built-up environmentsDafna Fisher-Gewirtzman_View-oriented three-dimensional visual analysis modelsExploring isovist fields space and shape in architectural and urban morphologyM. LLOBERA_Extending GIS-based visual analysis:the concept of visualscapes (Geographical Information ScienceMaking isovists syntactic_ isovist integration analysisMeasuring_Surrounding_Space_to_Assess_t he_Pedestrian_Visual_Aperture_Angle_in_th e_Urban_Fabric_-_Toward_a_Kurtosis-Base d_Isovist_IndicatorMorello_Ratti__A Digital Image of the City:3D isovists in Lynch's urban analysis Osmond P_2009APPLICA TION OF NEAR-INFRARED HEMISPHERICAL PHOTOGRAPHYTO ESTIMA TE LEAF AREA INDEX OF URBAN VEGETA TIONPerry Pei-Ju Yang _Computing the sense of time in urban physical environment Gewirtzman (这是一个德国人)的空间开放性作为一个实用的度量方式来评价建筑环境一个三维可视方法相对地评估建筑物密集的环境Gewirtzman的空间开放性作为一个实用的度量方式来评价建筑环境基于视图的三维视景分析模型探索“视区”:建筑和城市形态学里的空间和形状拓展基于GIS的视觉分析:“可视景观”概念的提出(地理信息系统)使“视点”符合句法,整合视点分析测量周围空间来估计城市结构中步行者的视觉光圈(穿孔,缝隙)角度--引向一个基于峰度的视点指示物一个城市的电子图像:林钦城市分析的的三维视点群近红外半球形摄影术的应用:估算城市植被树叶区的指数计算城市自然环境的时间感Perry Pei-Ju Y ang_Viewsphere a GIS-based 3D visibility analysis for urban design evaluationUsing the spatial openness metric for comparative evaluation of urban environmentsSOI:A Graphic Tool For Calculating Spatial Openness IndexIsovists, enclosure, and permeability theoryStamps-Isovists, enclosure, and permeability theoryTeller_A spherical metric for the field-oriented analysis of complex urban open spacesTucker C_A method for the visual analysis of the streetscapeTurner A _Analysing the visual dynamics of spatial morphologyTurner A, Penn A_Making isovists syntactic isovist integration analysisTurner A_From isovists to visibility graphs:a methodology for the analysis of architectural space 基于GIS的对评估城市设计的三维可视分析利用空间开放性度量方式比较评估城市环境计算空间开放指数的图表工具视点,封闭区,渗透性理论同上用于对复杂城市开放空间做侧重实地作业的分析的一个球面度量方式街景视觉分析的一个方法空间形态学的视觉动态分析使“视点”符合句法,整合视点分析从视点到可视性图表:建筑空间分析的方法论Space Syntax 空间句法The automatic definition and generation of axial lines and axial mapsDursun P-SPACE SYNTAX IN ARCHITECTURAL DESIGNItzhak O_Bin J_08Topological Qualities of Urban Streets and 自动清晰化和生成轴线和轴状图建筑设计中的空间句法城市街道和城市映像的拓扑质量:一个多the Image of the City: A Multi-Perspective ApproachJiang B _Chengke L_07Street-based Topological Representations and Analyses for Predicting Traffic Flow in GISJiang B_09The Image of the City: From the Medial Axes to the Axial LinesJiang B_T-GIS2002-295-309Lucas F_ Luiz A_08Decoding the urban grid: or why cities are neither trees nor perfect gridsLucas F_2006Continuity lines in the axial systemPORTA S-THE NETWORK ANALYSIS OF URBAN STREETS A PRIMAL APPROACHRatti C_Urban texture and space syntax: some inconsistenciesThe Image of the City From the Medial Axes to the Axial LinesTopological Qualities of Urban Streets and the Image of the City A Multi-Perspective Approach 角度方法基于街道的拓扑重现与在GIS里的交通流预测分析城市映像:从中轴线到轴向线把空间句法整合入GIS:城市形态学新认识解码城市网格:为什么城市既不是树状结构也不是理想的网状结构?轴向系统中的连续线条城市街道的网格分析:一个原始构想城市结构和空间句法:一些矛盾的地方城市映像:从中轴线到轴向线城市街道和城市映像的拓扑质量:一个多角度方法Urban 3D Model 城市三维模型3D urban models_ Recent developments in the digital modelling of urban environments in three-dimensions3D-GIS for Urban PurposesAN INTEGRA TED SYSTEM FOR URBAN MODEL GENERA TION 城市环境三维电子模型的发展近况三维DIS的城市用途生成城市模型的一个完整系统Binary Encoding of a Class of Rectangular Built-FormsElements of a representation framework for performance-based designThree Dimensional Information Visualisation 一类三角形建筑形式的二进制编码基于绩效的设计中表现构架的元素三维信息形象化Urban Form 城市形式Dela21-2004-41-52FROM URBAN FORM TO URBAN RELA TIONS:IN SEARCH FOR A NEW KIND OF REFLEXIVE AND CRITICAL KNOWLEDGE IN URBAN GEOGRAPHY AND CITY MONITORINGmethod-reading citypattern 2:Shopping StreetsUrban Pattern Specification 从城市形式到城市关系:寻找一种新的城市地理和监控系统的自反性批判性知识方法论—解读城市形态2:购物街城市形态详细说明。
Digital Image Processing Using MATLAB®Second EditionRafael C. GonzalezUniversity of TennesseeRichard E. WoodsMedData InteractiveSteven L. EddinsThe MathWorks, Inc.Gatesmark Publishing®A Division of Gatesmark,® LLCLibrary of Congress Cataloging-in-Publication Data on FileLibrary of Congress Control Number: 2009902793© 2009 by Gatesmark, LLCAll rights reserved. No part of this book may be reproduced or transmitted in any form or by any means, without written permission from the publisher.Gatesmark Publishing ® is a registered trademark of Gatesmark, LLC, .Gatesmark ® is a registered trademark of Gatesmark, LLC, .MATLAB ® is a registered trademark of The MathWorks, Inc., 3 Apple Hill Drive, Natick, MA 01760-2098The authors and publisher of this book have used their best efforts in preparing this book. These efforts include the development, research, and testing of the theories and programs to determine their effectiveness. The authors and publisher shall not be liable in any event for incidental or consequential damages with, or arising out of, the furnishing, performance, or use of these programs.Printed in the United States of America10 9 8 7 6 5 4 3 2 1ISBN 978-0-9820854-0-0Gatesmark Publishing A Division of Gatesmark, LLCPrefaceThis edition of Digital Image Processing Using MATLAB is a major revision ofthe book. As in the previous edition, the focus of the book is based on the factthat solutions to problems in the field of digital image processing generallyrequire e xtensive experimental work involving software simulation and testingwith large sets of sample images. Although algorithm development typically isbased on theoretical underpinnings, the actual implementation of these algorithmsalmost always r equires parameter estimation and, frequently, algorithm revisionand comparison of candidate solutions. Thus, selection of a flexible, comprehen-sive, and well-documented software development environment is a key factor thathas important i mplications in the cost, development time, and portability of imageprocessing solutions.Despite its importance, surprisingly little has been written on this aspect of thefield in the form of textbook material dealing with both theoretical principles andsoftware implementation of digital image processing concepts. The first edition ofthis book was written in 2004 to meet just this need. This new edition of the bookcontinues the same focus. Its main objective is to provide a foundation for imple-menting image processing algorithms using modern software tools. A complemen-tary objective is that the book be self-contained and easily readable by individualswith a basic background in digital image processing, mathematical analysis, andcomputer programming, all at a level typical of that found in a j unior/senior cur-riculum in a technical discipline. Rudimentary knowledge of M ATLAB also is de-sirable.To achieve these objectives, we felt that two key ingredients were needed. Thefirst was to select image processing material that is representative of material cov-ered in a formal course of instruction in this field. The second was to select soft-ware tools that are well supported and documented, and which have a wide rangeof applications in the “real” world.To meet the first objective, most of the theoretical concepts in the followingchapters were selected from Digital Image Processing by Gonzalez and Woods,which has been the choice introductory textbook used by educators all over theworld for over three decades. The software tools selected are from the MATLAB®Image Processing Toolbox™, which similarly occupies a position of eminence inboth education and industrial applications. A basic strategy followed in the prepa-ration of the current edition was to continue providing a seamless integration ofwell-established theoretical concepts and their implementation using state-of-the-art software tools.The book is organized along the same lines as Digital Image Processing. Inthis way, the reader has easy access to a more detailed treatment of all the imageprocessing concepts discussed here, as well as an up-to-date set of references forfurther reading. Following this approach made it possible to present theoreticalmaterial in a succinct manner and thus we were able to maintain a focus on thesoftware implementation aspects of image processing problem solutions. Becauseit works in the MATLAB computing environment, the Image Processing Toolboxoffers some significant advantages, not only in the breadth of its computationalxiiitools, but also because it is supported under most operating systems in use today. Aunique feature of this book is its emphasis on showing how to develop new code toenhance existing MATLAB and toolbox functionality. This is an important featurein an area such as image processing, which, as noted earlier, is characterized by theneed for extensive algorithm development and experimental work.After an introduction to the fundamentals of MATLAB functions and program-ming, the book proceeds to address the mainstream areas of image p rocessing. Themajor areas covered include intensity transformations, fuzzy image processing, lin-ear and nonlinear spatial filtering, the frequency domain filtering, image restora-tion and reconstruction, geometric transformations and image registration, colorimage processing, wavelets, image data compression, morphological image pro-cessing, image segmentation, region and boundary representation and description,and object recognition. This material is complemented by numerous illustrationsof how to solve image processing problems using MATLAB and toolbox func-tions. In cases where a function did not exist, a new function was written and docu-mented as part of the instructional focus of the book. Over 120 new functions areincluded in the following chapters. These functions increase the scope of the ImageProcessing Toolbox by approximately 40% and also serve the important purposeof further illustrating how to implement new image processing software solutions.The material is presented in textbook format, not as a software manual.Although the book is self-contained, we have established a companion web site(see Section 1.5) designed to provide support in a number of areas. For studentsfollowing a formal course of study or individuals embarked on a program of selfstudy, the site contains tutorials and reviews on background material, as well asprojects and image databases, including all images in the book. For instructors, thesite contains classroom presentation materials that include PowerPoint slides of allthe images and graphics used in the book. Individuals already familiar with imageprocessing and toolbox fundamentals will find the site a useful place for up-to-datereferences, new implementation techniques, and a host of other support materialnot easily found elsewhere. All purchasers of new books are eligible to downloadexecutable files of all the new functions developed in the text at no cost.As is true of most writing efforts of this nature, progress continues after workon the manuscript stops. For this reason, we devoted significant effort to the selec-tion of material that we believe is fundamental, and whose value is likely to remainapplicable in a rapidly evolving body of knowledge. We trust that readers of thebook will benefit from this effort and thus find the material timely and useful intheir work.R afael C. G onzalezR iChaRd e. W oodss teven l. e ddins xiv。
PatternRecognition40(2007)309–320www.elsevier.com/locate/patcog
Affineinvariantcomparisonofpoint-setsusingconvexhullsandhausdorffdistances
C.Gope,N.Kehtarnavaz∗DepartmentofElectricalEngineering,EC33,UniversityofTexasatDallas,Richardson,TX75083-0688,USAReceived31October2005;receivedinrevisedform3March2006;accepted24April2006
AbstractManyobjectrecognitionoridentificationapplicationsinvolvecomparingfeaturesassociatedwithpoint-sets.Thispaperpresentsanaffineinvariantpoint-setmatchingtechniquewhichmeasuresthesimilaritybetweentwopoint-setsbyembeddingthemintoanaffineinvariantfeaturespace.Thedevelopedtechniqueassumesnoaprioriknowledgeofreferencepoints,asisthecaseinmanyidentificationproblems.Referencepointsofapoint-setareobtainedbasedonitsconvexhull.AnenhancedversionoftheModifiedHausdorffDistanceisalsointroducedandusedinthefeaturespaceforcomparingtwopoint-sets.Itshouldbenotedthatthetechniquedoesnotattempttoobtaincorrespondencesbetweenthepoint-sets.Theintroducedtechniqueisappliedtotworealdatabasesanditsperformanceisfoundfavorableascomparedtothreeotheraffineinvariantmatchingtechniques.᭧2006PatternRecognitionSociety.PublishedbyElsevierLtd.Allrightsreserved.
Keywords:Affineinvariant;Convexhull;Hausdorffdistance;Point-patterncomparison;Shapematching
1.IntroductionObjectmatchingisrequiredinmanyrecognitionoriden-tificationapplications.Asetoffeaturesisusuallyextractedfromaqueryimageandmatchedagainstadatabaseofim-ageswithsimilarfeaturesinordertoidentifythebestpos-siblematch.Amongthemostcommonlyusedfeaturesarepoints,lines,andcurves.Ofcourse,thesuitabilityofthecho-senfeaturesdependsupontheapplication.Forexample,in[1,2],weusedthecurvefeaturesforthephoto-identificationofmarinemammals.Thereareotherapplications,wherepoint-setsprovidethemostreliableortheonlyavailablefeatures.Thisworkaddressestheproblemofmeasuringthesimilarityofpoint-setsunderpossibleaffinetransformations,awidelyencounteredproblemindiversefieldssuchascom-putervision,patternrecognition,computationalgeometry,molecularbiology,etc.Althoughthereareapplicationsforwhichtheknowledgeofafewdistinguishingreferencepointsisavailable,theproblemstudiedhereassumesnosuchaprioriknowledge.It
∗Correspondingauthor.Tel.:+19728836838;fax:+19728832710.
E-mailaddress:kehtar@utdallas.edu(N.Kehtarnavaz).
0031-3203/$30.00᭧2006PatternRecognitionSociety.PublishedbyElsevierLtd.Allrightsreserved.
doi:10.1016/j.patcog.2006.04.026
isshownthatforapoint-setwithirregular(non-symmetric)pointdistributions,affineinvariantreferencepointscanbegeneratedfromthepoint-setitself.Theintroducedaffineinvariantmatchingtechniqueutilizestheconvexhullofthepoint-settoextractaffineinvariantfeatures.VariationsoftheHausdorffdistancearethenusedforcomparingtwopoint-setsembeddedintheaffine-invariantfeaturespace.Amajorattributeofthismatchingtechniqueisthatitdoesnotrequireanyuser-definedparameters.Thematchingresultsareshownfortworealdatabasesandtheperformanceiscomparedtothreeaffinematchingtechniques,namelyAffineMomentInvariants,DiscreteAffineMoments,andInvariantFeatureVectorusingconvexhulls.Noiseandocclusioneffectsarealsostudiedandcompared.Thepaperisorganizedasfollows.Section2providesanoverviewofthepreviousworkasrelatedtopoint-setcom-parisonandmatching.Section3brieflydescribestheprob-lemofaffineinvariantmatching.Then,Section4describesthedevelopedaffineinvariantpoint-setmatchingtechniqueusingconvexhullsandHausdorffdistances.ExperimentalresultsarepresentedinSection5.Finally,thepaperiscon-cludedinSection6.310C.Gope,N.Kehtarnavaz/PatternRecognition40(2007)309–3202.Previousworkonpoint-setmatchingAnumberoftechniquesaddressingtheproblemofpoint-setorpoint-patternmatchinghaveappearedintheliterature.Clusteringapproachisusedin[3]tosimultaneouslydeter-minethetransformation(restrictedtotranslation,rotationandscaling)andpointmatchingbetweentwoimages.Trans-formationparametersforallpossiblepoint-pairingsarecal-culatedandthenclusteredinaparameterspace,withthestrongestclusterrepresentingthemostlikelytransformation.Suchmethodsarenotcomputationallyefficientwhichlim-itstheirusage.Itisworthpointingoutthatthetechniquedescribedinthispapergeneratesaffineinvariantreferencepointswhichcouldbeeffectivelyusedtoimprovetheef-ficiencyofsuchclusteringapproaches.In[4],afaster2Dclusteringapproachisintroducedwherethematchingisin-varianttotranslation,rotation,andscalechanges.In[5],astatisticalframeworkforiterativealignmentandcorrespon-denceofpoint-setsisdiscussedwithrespecttotwodiffer-entmodels,theProcrustesmodelandthepoint-distributionmodel.In[6],aleast-squaresestimationapproachinvarianttotranslation,rotation,andscalechangesisdiscussedfortwopoint-setshavingthesamecardinality.Inter-pointdis-tancesareusedin[7,8]forpoint-setcomparisonemployinggraphsandsearchtrees.In[9],inter-pointdistancesarecal-culatedforallthepointsinapoint-setandthensomeheuris-ticsareusedtoobtainlocalmatchesbetweentwopoint-sets.Thisprocessisiterateduntilanacceptableglobalmatchisobtained.In[10],ageometricalignmentstrategyisusedwhiletheconceptofgeometrichashingisutilizedin[11].Hausdorffdistancesforimagematchinginvarianttotrans-lation,rotation,andscalechangesarepresentedin[12].In[13],theHausdorffdistancemethodisextendedtothemoregeneralaffinetransformationforlocatingobjectsinascene.Inthismethod,agridisimposedonthespaceofpossibleaffinetransformationsandthecomplexityofthealgorithmisdependentupontherestrictionsappliedtotheallowedtrans-formations.In[14],ahierarchicaltop-downapproachisusedtoestimatethebestaligningaffinetransformationamongallpossibletransformations.TheIterativeClosestPointalgo-rithmisintroducedin[15],whereaniterativeleast-squarestechniqueisusedtoobtain3Dmotionfromthepointcorrespondencesbetweentwopoint-sets.In[16],matchingisperformedbyfindingthecorrespondencebetweenaffinetransformedpoint-setswhereallthepossiblesetsoffourpointsinasetaretakenintoconsideration.Fourierdescrip-torsareusedin[17]foraffineinvariantrecognitionof3Dobjects.In[18],apointmatchingstrategyisdiscussedusingaffineinvariantrepresentationofpointsbasedonatripletofbasispoints.Allpossibletripletsareconsideredandtheaffineinvariantsoftheremainingpointsarecomputedandstoredinahash-table,whichisthenusedinthematchingstage.In[19],anexplicitnoisemodelandanoptimalvotingapproachareusedtoachievearobustaffineinvariantpointmatching.In[20],aglobalaffinetransformcorrelationisusedtoalignaffinetransformedgray-levelimages.