2007年第3期 人口学刊 No.3,2007 (总第163期) POPULATI O N JO URNAL (Tot.No.163) 我国人口重心、就业重心与经济 重心空间演变轨迹分析 廉晓梅 (吉林大学东北亚研究中心,吉林长春130012) 【摘 要】近20年来我国人口重心、就业重心、经济重心的空间演变轨迹表明,我国区域经济差距的主要原因是东部沿海地区不断集聚生产的同时,没有更有效地吸纳中西部地区的人口,从而造成我国东部沿海地区与中西部地区的生产与人口、就业分布高度失衡。目前,建立完善的分享机制、进一步促进西部落后地区的人口向东部沿海发达地区流动、建立健全的流动人口管理体制是促进我国区域协调发展的有效策略。 【关键词】人口重心;就业重心;经济重心;演变轨迹 【中图分类号】C924.24 【文献标识码】A 【文章编号】1004-129X(2007)03-0023-06 【收稿日期】2006-11-05 【基金项目】该项成果得到“吉林大学‘985工程’项目”资助 【作者简介】廉晓梅(1971-),女,吉林辽源人,吉林大学东北亚研究中心副教授,经济学博士。 一、文献综述与本文的研究方法 “重心”原本是一个物理学概念,是指物体内各点所受重力产生合力的作用点。应用于经济活动中,是指在区域空间上存在某一点,在该点前后左右各个方向上的力量对比能够维持均衡。1874年,美国学者弗沃尔克把“重心”的方法引入到人口问题研究之中,分析了美国西部开发和阳光地带崛起所引起的美国人口分布变化情况。台湾学者黄金树(1988)关于中国大陆经济重心与空间发展状况的研究、[1]樊杰和W陶普曼(1996)关于改革开放以来中国农村工业重心变动的研究、[2]周民良(2000)关于我国经济重心演变与区域差距形成原因的研究、[3]乔家君等(2005)关于近50年来中国经济重心移动路径的研究、[4]冯宗宪等(2006)关于1978-2003年中国经济重心与产业重心的动态轨迹的研究[5]等,都是中国经济重心及相关问题研究的代表性成果。有关中国“人口重心”比较有代表性的研究包括李义俊(1983)关于我国的人口重心及其移动轨迹(1912-1978年)的研究、[6]张善余(1991)关于我国人口重心分布情况的研究、[7]刘德钦等(2002)应用人口重心对我国人口分布的空间的研究[8]以及温军(1994)、郑连斌(1995)、袁祖亮(1998)分别运用“重心”的分析方法研究了甘肃、内蒙古、河南人口重心移动。[9][10][11]总之,有关我国经济重心与人口重心的研究已经取得了相当程度的进展,但也仍然存在许多需要进一步深入研究的领域。例如,目前还缺少关于“经济重心”、“人口重心”、“就业重心”演变轨迹比较分析的研究成果,甚至还没有关于我国“就业重心”空间演变轨迹的分析。 区域重心的分析方法主要是确定区域重心空间区位及不同年份区域重心空间区域的移动距离与移动方向。在社会经济问题研究中,通常用以下方法确定区域重心。假设某一个区域由n个次一级区域i构成,那么该区域某种属性的“重心”通常采用如下的计算方法来表示:
动点轨迹问题专题讲解 一.专题内容: 求动点(, )P x y 的轨迹方程实质上是建立动点的坐标, x y 之间的关系式,首先要分析形成轨迹的点和已知条件的内在联系,选择最便于反映这种联系的坐标形式,寻求适当关系建立等式,常用方法有: (1)等量关系法.....:根据题意,列出限制动点的条件等式,这种求轨迹的方法叫做等量关系法,利用这种方法时,要求对平面几何中常用的定理和解析几何中的有关基本公式很熟悉. (2)定义法...:如果动点满足的条件符合某种已知曲线(如圆锥曲线)的定义,可根据其定义用待定系数法求出轨迹方程. (3)转移代入法.....:如果所求轨迹上的点(, )P x y 是随另一个在已知曲线C :(, )0F x y =上的动点00(, )M x y 的变化而变化,且00, x y 能用, x y 表示,即0(, )x f x y =,0(, )y g x y =,则将00, x y 代入已知曲线(, )0F x y =,化简后即为所求的轨迹方程. (4)参数法...:选取适当的参数(如直线斜率k 等),分别求出动点坐标, x y 与参数的关系式,得出所求轨迹的参数方程,消去参数即可. (5)交轨法...:即求两动直线交点的轨迹,可选取同一个参数,建立两动直线的方程,然后消去参数,即可(有时还可以由三点共线,斜率相等寻找关系).
注意:轨迹的完备性和纯粹性!一定要检验特殊点和线! 二.相关试题训练 (一)选择、填空题 1.( )已知1F 、2F 是定点,12||8F F =,动点M 满足12||||8MF MF +=,则动点M 的轨迹是 (A )椭圆 (B )直线 (C )圆 (D )线段 2.( )设(0,5)M ,(0,5)N -,MNP ?的周长为36,则MNP ?的顶点P 的轨迹方程是 (A )22125169x y + =(0x ≠) (B )22 1144169 x y +=(0x ≠) (C ) 22116925x y +=(0y ≠) (D )22 1169144 x y +=(0y ≠) 3.与圆2240x y x +-=外切,又与y 轴相切的圆的圆心轨迹方程是 ; 4.P 在以1F 、2F 为焦点的双曲线22 1169 x y -=上运动,则12F F P ?的重心G 的轨迹方程是 ; 5.已知圆C : 22(16x y +=内一点)A ,圆C 上一动点Q , AQ 的垂直平
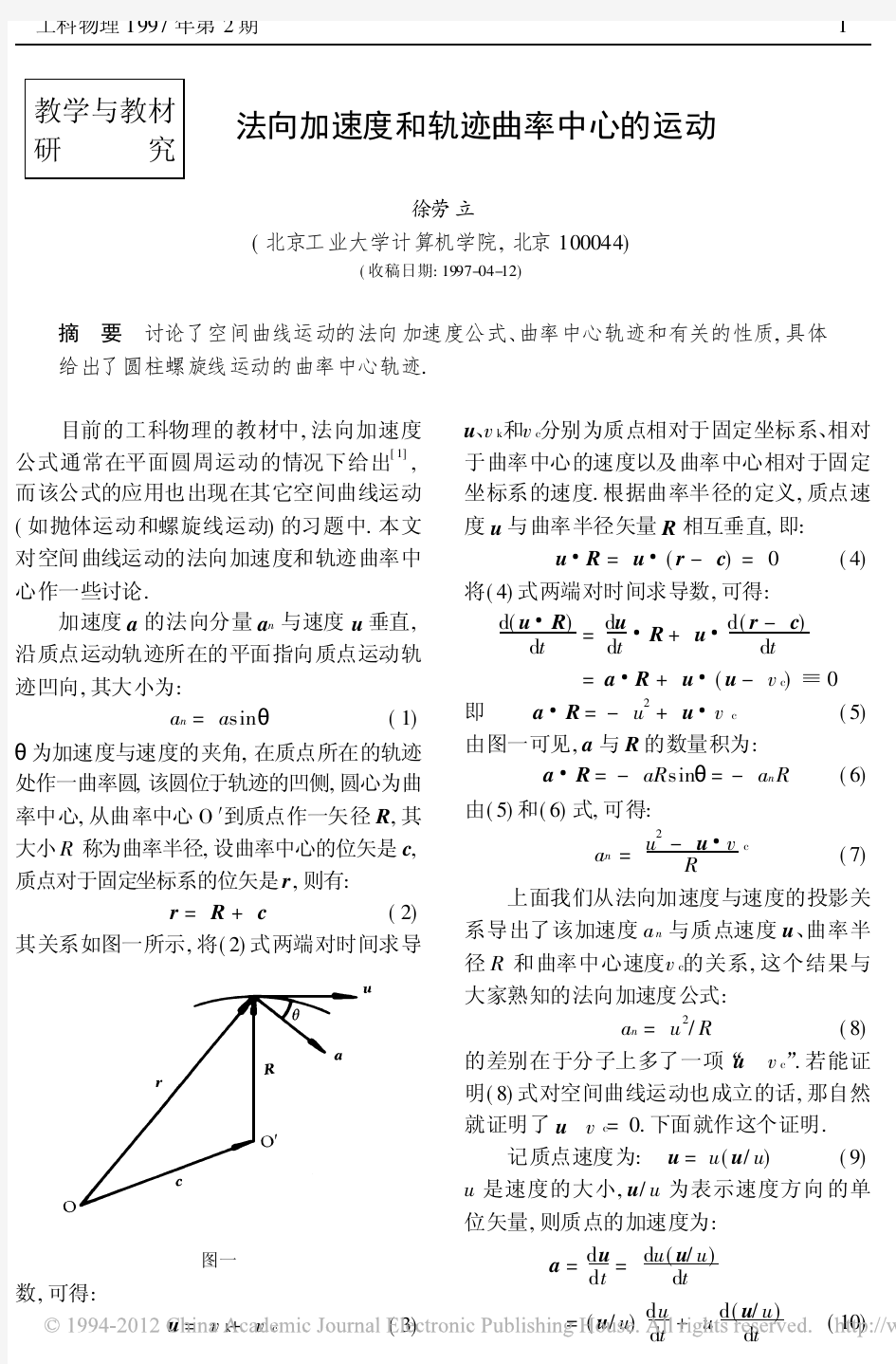
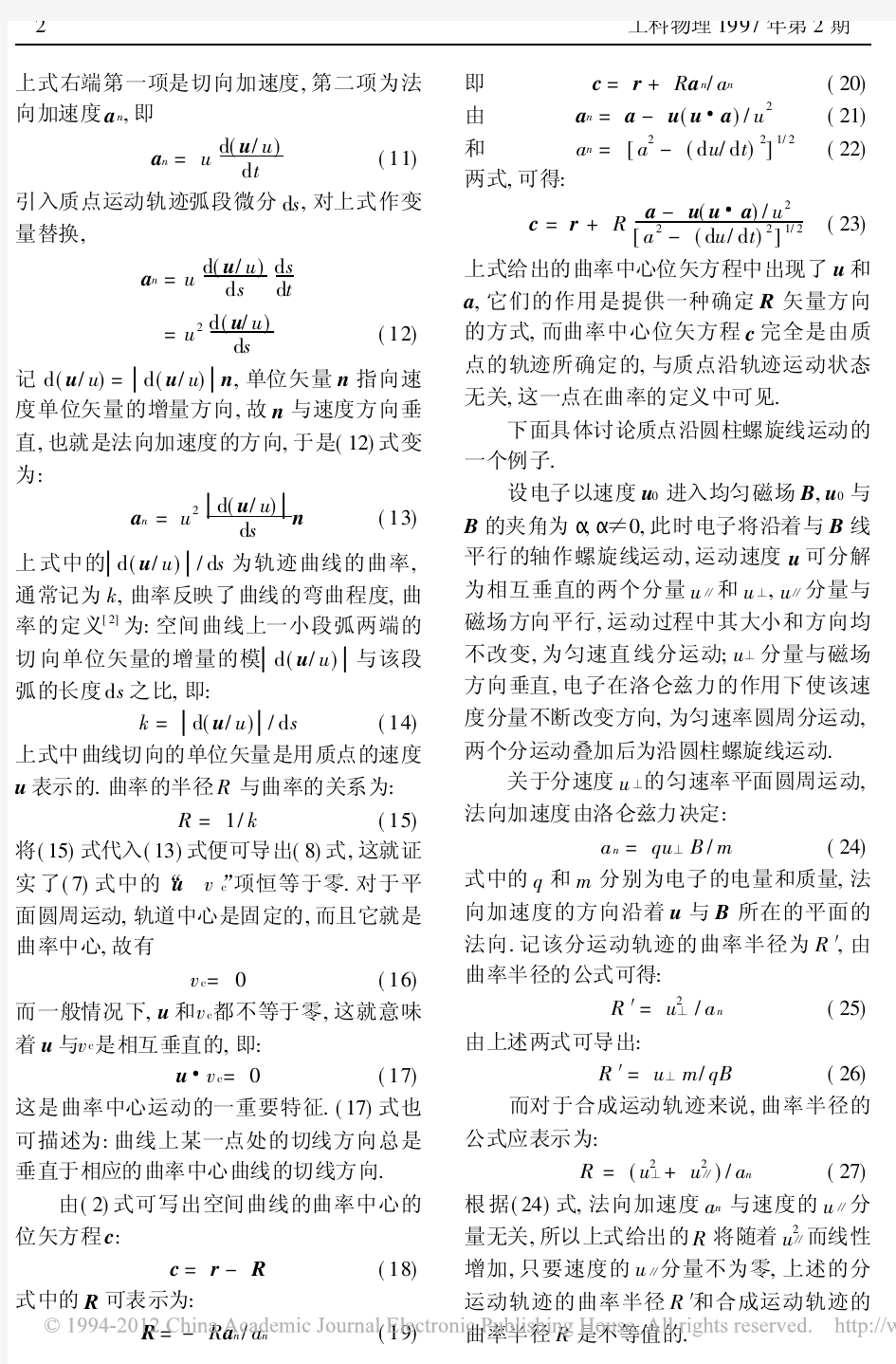
用物理方法求常见曲线的曲率半径 王吉旭 滑县第一高级中学 456400 求曲线曲率的问题常出现在高中物理竞赛中,而近年来高考中也涉及到曲线曲率的问题,例如2008年江苏理综14题涉及到曲率半径,2011年高考安徽理综17题更是要求求出曲线曲率. 在数学中曲线的曲率半径可以用高等数学的方法求出,这里我们另辟蹊径,从物理的角度采用初等数学求出曲线曲率半径. 我们首先来看2011高考安徽理综17题: 一般的曲线运动可以分成很多小段,每小段都可以看成圆周运动的一部分,即把整条曲线用一系列不同半径的小圆弧来代替. 如图(a )所示,曲线上A 点的曲率圆定义为:通过A 点和曲线上紧邻A 点两侧的两点作一圆,在极限情况下,这个圆就叫做A 点的曲率圆,其半径ρ叫做A 点的曲率半径. 现将一物体沿与水平面成α角的方向以速度v 0抛出,如图(b )所示。则在其轨迹最高点P 处得曲率半径是( ) A .g v 20 B .g v α220sin C .g v α220cos D .ααsin cos 220g v [解析] 物体在最高点P,只有水平速度为αcos 0v ,物体只受重力. 由r v m F 2 =向得: ρα20)cos (v m mg = 则有:g v αρ220cos = 本题正确答案为C 上述问题给我们启示: 从物理的角度,我们也可以求出曲线上某点的曲率半径. 事实上,物理学上我们常讨论的曲线有抛物线、椭圆、双曲线等,我们都可以利用上述的方法求曲率半径.下面我们来逐一研究. 一、求抛物线顶点的曲率半径 物体做平抛运动时其轨迹就是抛物线.假设物体平抛初速度为0v ,运动轨迹如图2所示. 则有将物体的运动分解为水平分运动和竖直分运动: 公式为:t v x 0= ① 22 1gt y = ② 联立①②式得220 2x v g y = 图1
龙源期刊网 https://www.doczj.com/doc/c68789622.html, 我国农作物重心演变轨迹与地理集聚趋势分析 作者:苏姗王玉贵 来源:《农村经济与科技》2017年第13期 [摘要]基于 2001~2015年我国农作物种植面积及4类主要农作物种植面积数据,运用重心移动法、空间基尼系数法和莫兰指数法,并借助ArcGIS、GeoDa软件对我国农作物地理集聚格局演变进行分析。结果表明,我国农作物重心在2007年出现明显拐点,在此之前重心一直向北偏西移动,2007年以后开始逐年向西南方向移动,主要在河南境内移动,同时,集聚程 度逐年增大;粮食油料也分别在2006年、2007年出现拐点,但总体趋势还是偏向西南,而其余两种农作物重心都快速向西南移动;4类农作物基尼系数均大于0.4,说明都存在集聚现 象,并且具体阐述了4类主要农作物的集聚趋势。 [关键词]农作物;重心轨迹;空间自相关;基尼系数;集聚 [中图分类号]F30124 [文献标识码]A 我国是一个农业大国,农业是国民经济的基础,不仅关系到农村社会经济发展,更关系到国家的长治久安。种植业是农业的主要组成部分之一,其空间分布很大程度上决定了整个农业的空间布局。因此,种植业的地理空间分布研究是制定科学的农业政策的前提和基础,对促进国民经济增长具有重要意义。随着现代化技术的发展,我国种植业逐渐向规模化、专业化、特色化方向发展,在空间分布上也呈现明显的集聚现象。近年来,国内学者也开展了一系列对农业集聚的研究,已取得一定成效。其中,李二玲分析了中国大豆种植的地理集聚格局、演化路径及其机制;肖卫东运用空间统计方法探讨了中国省域种植业的空间依赖性和空间异质性,进一步探索了种植业的地理集聚特征和变化趋势。 这些研究对于农作物具体的分布转移涉及不多,本文通过收集全国省域2001~2015年的种植业播种面积数据,借助莫兰指数与区位基尼系数两指标相结合来测度农业地理集聚程度,并利用农作物重心轨迹反映出各类农作物分布及其演变的基本态势。因此,了解农作物分布演变的历史过程及发展趋势,分析农作物变动规律及原因,为我国不同地区的农业发展与产业布局调整的时空变化提供科学依据。 1 区域概况与数据来源 我国的地势西高东低,呈阶梯状分布,山地和高原面积广大,气温降水的组合多样,形成了多种多样的气候,同时也形成了我国农业种类的多样性。虽然我国农作物种植种类较多,但粮食、油料、蔬菜、糖类的种植比重最大,占我国农作物种植的90%之多,这也是本文选择该数据的依据。为保证数据的一致性,本文中种植业播种面积基础数据,均来自《2001~2015
点的运动轨迹 符合一定条件的动点所形成的图形,或者说,符合一定条件的点的全体所组成的集合,叫做满足该条件的点的轨迹. “动点路径”是一个比较抽象的问题,但在高中解析几何中的学习是非常有用的,也是非常重要的。在研究动点问题时,可以在运动中寻找不变的量,即不变的数量关系或位置关系.如果动点的轨迹是一条线段,那么其中不变的量便是该动点到某条直线的距离始终保持不变;如果动点的轨迹是一段圆弧,那么其中不变的量便是该动点到某个定点的距离始终保持不变.因此,解决此类动点轨迹问题便可转化为寻找变量与不变的关系。 常用的基本轨迹: 1、如图,已知AB=10,P是线段AB上的动点,分别以AP、PB为边在线段AB的同侧作等边△ACP和△PDB,连接CD,设CD的中点为G,当点P从点A运动到点B时,则点G移动路径的长是______. 变式1、(2010桂林)如图:已知AB=10,点C、D在线段AB上且AC=DB=2;P是线段CD 上的动点,分别以AP、PB为边在线段AB的同侧作等边△AEP和等边△PFB,连接EF,设EF的中点为G;当点P从点C运动到点D时,则点G移动路径的长是______. 变式2、如图:已知AB=10,点C、D在线段AB上且AC=DB=2;P是线段CD上的动点,分别以AP、PB为边在线段AB的同侧作正方形APEF和正方形PBGH,点O1和O2是这两个正方形的中心,连接O1O2,设O1O2的中点为Q;当点P从点C运动到点D时,则点Q移动路径的长是______. 2、如图,已知线段AB=10,AC=BD=2,点P是CD上一动点,分别以AP、PB为边向上、向 下作正方形APEF和PHKB,设正方形对角线的交点分别为O1、O2,当点P从点C运动到点D时,线段O1O2中点G的运动路径的长是_____.
用物理方法求常见曲线的曲率半径 求曲线曲率的问题常出现在高中物理竞赛中,而近年来高考中也涉及到曲线曲率的问题,例如江苏理综14题涉及到曲率半径,高考安徽理综17题更是要求求出曲线曲率. 在数学中曲线的曲率半径可以用高等数学的方法求出,这里我们另辟蹊径,从物理的角度采用初等数学求出曲线曲率半径. 我们首先来看高考安徽理综17题: 一般的曲线运动可以分成很多小段,每小段都可以看成圆周运动的一部分,即把整条曲线用一系列不同半径的小圆弧来代替. 如图(a )所示,曲线上A 点的曲率圆定义为:通过A 点和曲线上紧邻A 点两侧的两点作一圆,在极限情况下,这个圆就叫做A 点的曲率圆,其半径ρ叫做A 点的曲率半径. 现将一物体沿与水平面成α角的方向以速度v 0抛出,如图(b )所示。则在其轨迹最高点P 处得曲率半径是( ) A .g v 20 B .g v α220sin C .g v α220cos D .α αsin cos 220g v [解析] 物体在最高点P,只有水平速度为αcos 0v ,物体只受重力. 由r v m F 2 =向得: ρα20)cos (v m mg = 则有:g v α ρ22 0cos = 本题正确答案为C 上述问题给我们启示: 从物理的角度,我们也可以求出曲线上某点的曲率半径. 事实上,物理学上我们常讨论的曲线有抛物线、椭圆、双曲线等,我们都可以利用上述的方法求曲率半径.下面我们来逐一研究. 一、求抛物线顶点的曲率半径 物体做平抛运动时其轨迹就是抛物线.假设物体平抛初速度为0v ,运动轨迹如图2所示. 则有将物体的运动分解为水平分运动和竖直分运动: 公式为:t v x 0= ① 2 2 1gt y = ② 联立①②式得2 2 2x v g y = 图1 x y O 图2 v 0
从重心变化看熊晃动作的学练要点 熊晃是健身气功·五禽戏中比较典型的动作之一,同时也是练习者较难掌握的一个要点。根据熊晃动作的运动特征和技术要求,我们将熊晃动作分为提髋、落步前靠、后坐三个阶段,希冀在探寻这几个阶段身体重心变化规律的同时,能够从中领会到学练这个动作的诸多要点。为了便于分析探讨,以下全部动作以熊晃左势为例。 提髋动作阶段 提髋动作阶段是指熊晃动作开始到左髋上提至最高点这个过程。提髋阶段的技术要求是:习练者提髋侧的髋部要平稳缓慢的提高,由此带来习练者身体重心高度的增长也应该是均匀缓慢的。 通过生物力学分析和观察我们看到,初学者做提髋动作易犯的错误集中体现在提髋阶段重心高度起伏不定。提髋时重心高度的变化主要取决于支撑腿、腰际的姿势和高度。提髋时须把提髋侧腰部肌肉收紧,以髋带腿来保证身体重心的稳步升高。初学者犯错误的原
因,常常是由于支撑腿膝关节出现的屈曲所致。因为支撑腿屈曲会使身体重心下降,不利于提髋侧腰部肌肉发力;而支撑腿再由屈曲到伸直需要借助地面的反作用力,又使得伸直过程的身体重心高度会出现大幅度提高,导致提髋动作不稳定,产生了关联效果。 众所周知,力是改变物体运动的原因,做熊晃这个动作也同样符合这个定律。准确的提髋动作应该是腰部肌肉发力带动髋关节的运动,再由髋关节带动腿运动,同时膝关节、踝关节自然放松的结果。整个提髋动作的力量是经过髋、膝、踝关节,由身体中间向肢体末端依次传递的过程,从而达到对肢体末端的控制,并保持身体重心的平稳变化。 落步前靠动作阶段 落步前靠阶段是从左髋自最高点到左肩前靠至最前点这个动作过程。整个落步前靠阶段,习练者的身体重心要前移,左脚在左前方落地,脚尖朝前,右腿缓慢伸直,身体右转,左臂内旋前靠,左拳摆置左膝前上方拳心朝左,右拳摆置体后拳心朝后。 根据生物力学技术解析发现,高水平习练者做这一动作的重心变化特征是:身体重心先幅度平缓的均匀下降,这对应落步的过程;尔后身体重心基本平稳不变地前移,这对应
中国经济与金融增长重心变动轨迹比较研究 2013年02月28日09:51 来源:《经济体制改革》2011年6期作者:张成虎胡啸兵王铁山字号 打印纠错分享推荐浏览量 103 【内容提要】经济重心理论是区域经济学研究的重要方法。本文借鉴物理学重心分析方法,重点研究经济与金融增长动力空间分布格局动态演化。通过刻画和比较分析2004-2009年我国经济增长重心和金融增长重心空间变动轨迹发现,我国区域经济、金融增长动力空间分布不平衡,且我国经济、金融总体空间分布的不平衡状况仍在加剧恶化,因此,有必要加大区域经济政策调整力度,实现我国区域经济与金融业全面协调可持续发展。 【关键词】经济增长重心金融增长重心变动轨迹 一、引言 近年来,中国经济增长迅速,2010年末GDP达58786亿美元,成为全球第二大经济体。同时,在“中国银行业监督管理委员会”成立及其金融改革的推动下,中国金融业也实现了跨越式发展。但由于中国各地自然禀赋、社会条件和经济政策千差万别,整体经济和金融业区域发展不平衡问题突出。在经济增长中,总有些地区经济增长动力强于其他地区,经济活动增量区域分布不均匀成为研究表征经济增量空间分布特征的“经济增长重心”的现实基础。本文将物理学重心理论引入经济与金融增长比较研究中,以探寻中国经济和金融业增长动力区域分布特征及其格局变动规律,为实现我国区域经济与金融业全面协调发展提供研究与决策参考。 二、经济重心及其研究述评 重心(Center of Gravity,COG),属力学概念,是指在重力场中物体各质点所受重力的合力均通过的那一点。物体重力与质量线性函数关系如下: Z=Mg① 其中,Z为物体重力,M为质量,g为重力加速度。 由①式可见,重力与其质量之间存在线性函数关系,根据线性转换原理,借助物理重心可表示物体质量空间分布总体特征。 所谓“经济重心”,是指在经济空间中各方向经济力量交相融合并处于平衡状态的一个点,其位置与空间内经济活动分布状况有关。经济重心变动轨迹能够反映出经济活动空间布局变化,可以借此说明空间经济发展变化和区域经济政策的实际效果。经济重心研究主要测度目标区域经济重心位置、位移方向及距离。假设某个区域由N个次级区域i构成,则该区域经济重心可表示为:
中国茶业重心的变迁过程 巴蜀产茶,可追溯到战国时期或更早,巴蜀已形成一定规模的茶区,并以茶为贡品。 三国时,孙吴据有东南半壁江山,这一地区,也是这时中国茶业传播和发展的主要区域。此时,南方栽种茶树的规模和范围有很大 的发展,而茶的饮用,也流传到了北方高门豪族。西晋时长江中游 茶业的发展,还可从西晋时期《荆州土记》得到佐证。其载曰“武 陵七县通出茶,最好”,说明荆汉地区茶业的明显发展,巴蜀独冠 全国的优势,似已不复存在。 六朝以前,茶在南方的生产和饮用,已有一定发展,但北方饮者还不多。及至唐朝中后期,如《膳夫经手录》所载「今关西、山东,闾阎村落皆吃之,累日不食犹得,不得一日无茶」。中原和西北少 数民族地区,都嗜茶成俗,于是南方茶的生产,随之空前蓬勃发展 了起来。尤其是与北方交通便利的江南、淮南茶区,茶的生产更是 得到了格外发展。唐代中叶后,长江中下游茶区,不仅茶产量大幅 度提高,就是制茶技术,也达到了当时的最高水平。湖州紫笋和常 州阳羡茶成为了贡茶就是集中体现。茶叶生产和技术的中心,已经 转移到了长江中游和下游,江南茶叶生产,集一时之盛。当时史料 记载,安徽祁门周围,千里之内,各地种茶,山无遗土,业于茶者 十之七八。同时由于贡茶设置在江南,大大促进了江南制茶技术的 提高,也带动了全国各茶区的生产和发展。由《茶经》和唐代其它 文献记载来看,这时期茶叶产区已遍及今之四川、陕西、湖北、云南、广西、贵州、湖南、广东、福建、江西、浙江、江苏、安徽、 河南等十四个省区,几乎达到了与中国近代茶区约略相当的局面。 从五代和宋朝初年起,全国气候由暖转寒,致使中国南方南部的茶业,较北部更加迅速发展了起来,并逐渐取代长江中下游茶区, 成为茶业的重心。主要表现在贡茶从顾渚紫笋改为福建建安茶,唐
平面运动点轨迹曲率半径和曲率中心的解析计算式 王允地1 王良文2 (1.陕西科技大学机械学院,陕西咸阳;2.郑州轻工业学院机电学院,河南郑州450002) 摘要 本文对平面运动点的位移、速度和加速度进行了复矢量描述,并引入复矢量点积概念。在此基础上,根据平面运动点的法向加速度等于速度的平方与曲率半径的比值的思想,给出了计算点轨迹曲率半径和曲率中心的通式、直角坐标式和极坐标式,还讨论了几个有代表性的分析实例。 关键词:平面运动点,轨迹曲率半径,曲率中心,解析计算式。 Analytic calculation formula for planar motion point trace’s radius of curvature and center point of curvature Wang Yundi (1)Wang Liangwen (2) (1.School of Mech·Eng·,Shanxi University of Science and Technology, ShanXi , Xianyang, 712081, China; 2. Electric-Mech·Dep·of Zhengzhou Llight Industry Institute, Zhengzhou , 450002, China) Abstract: The paper describes the displacement 、velocity 、acceleration of Planar motion point by vector, and presents vector dot matrix conception 。under this base, according to the theory that vertical acceleration of planar motion point equals the ratio between square of velocity and radius of curvature , the general calculation formula 、the formula in form of right angle coordinates and the formula in form of polar angle coordinates for calculating motion point trace’s radius of curvature and center point of curvature are submitted . Some typical examples are discussed. Key words: Planar motion point; trace’s radius of curvature; center point of curvature; analytic calculation formula. 0引言 在机构的运动分析与综合中,对运动点轨迹曲率的研究十分必要。如在凸轮机构综合中,凸轮廓线曲率的变化与从动件的加速度特性有重要的关联。曲率半径变化不合适,可能导致凸轮机构无法正常工作或者凸轮不能被正确加工。有关对平面运动点轨迹曲率半径和曲率中心的研究和阐述散见于各相关文献[1-9]。本文对这类问题进行了系统的研究。在用复矢量描述平面运动点的位移、速度和加速度的基础上,根据动点的法向加速度等于速度的平方与曲率半径比值的理论,利用矢量点积的概念,导出了平面运动点在运动中轨迹的曲率半径和曲率中心的计算通式,以及其运动点的轨迹采用参数型变量及函数型变量表达方式时,轨迹的曲率半径和曲率中心计算的直角坐标和极坐标的表达式。通过讨论有代表性的分析实例,证明了理论的正确性。 1 点平面运动的复矢量描述 1.1位移
话题4:曲率半径问题 一、曲率半径的引入 在研究曲线运动的速度时,我们作一级近似,把曲线运动用一系列元直线运动来逼近。因为在0t ?→ 的极限情况下,元位移的大小和元弧的长度是一致的,故“以直代曲”,对于描述速度这个反映运动快慢和方向的量来说已经足够了。 对于曲线运动中的加速度问题,若用同样的近似,把曲线运动用一系列元直线运动来代替,就不合适了。因为直线运动不能反映速度方向变化的因素。亦即,它不能全面反映加速度的所有特征。如何解决呢?圆周运动可以反映运动方向的变化,因此我们可以把一般的曲线运动,看成是一系列不同半径的圆周运动,即可以把整条曲线,用一系列不同半径的小圆弧来代替。也就是说,我们在处理曲线运动的加速度时,必须“以圆代曲”,而不是“以直代曲”。可以通过曲线上一点A 与无限接近的另外两个相邻点作一圆,在极限情况下,这个圆就是A 点的曲率圆。 二、曲线上某点曲率半径的定义 在向心加速度公式2 n v a ρ = 中ρ为曲线上该点的曲率半径。 圆上某点的曲率半径与圆半径相等,在中学物理中研究圆周运动问题时利用了这一特性顺利地解决了动力学问题。我们应该注意到,这也造成了对ρ意义的模糊,从而给其它运动的研究,如椭圆运动、抛体运动、旋轮线运动中的动力学问题设置了障碍。 曲率半径是微积分概念,中学数学和中学物理都没有介绍。曲率k 是用来描述曲线弯曲程度的概念。曲率越大,圆弯曲得越厉害,曲率半径ρ越小,且1 k ρ=。这就是说,曲线上一点处的曲率半径与曲线在该点处的曲率互为倒数。 二、曲线上某点曲率半径的确定方法 1、 从向心加速度n a 的定义式2 n v a ρ = 出发。 将加速度沿着切向和法向进行分解,找到切向速度v 和法向加速度n a ,再利用2 n v a ρ =求出该点的曲率半径ρ。
商丘工学院 教案 课程名称:人体工程学任课教师:王翠霞所属部系:传媒与现代艺术教研室:艺术设计授课时间:授课班级: 授课地点: 授课内容
第二章人体与尺寸 本章的重点: 1、了解人体尺寸、人体活动、人体重心、人体施力、人体作业效率等 2、了解人体与尺度及人体作业效率的基本概念,熟知人体尺寸、人体活动、人体重心及人体施力的数据及相关知识。 垂直作业域还收到下列情况影响: 1)在活动空间内是否有工作用具; 2)需保持一定的活动行程; 3)手的操作方式是持着荷载还是移动荷载 4)并非任何地方都是能触及目标的最佳位置。 人体的活动空间 人体姿态的变换和移动所占用的空间构成了人体活动空间。一般情况下,人体活动的空间大于作业域。 一、静态的手足活动 1)静态作业域定义:指的是人体处于静态时肢体在某一平面形成
的活动空间。 影响作业域大小的因素 ①肢体(活动)长度 ②肢体(活动)角度 ③人体所处的姿势 ④手足的操纵方式 2)作业域分类 ①数值分类(轻松值、正常值、极限值) 轻松值,多用于经常性的使用频率高的场所; 正常值,用于一般场所; 极限值,用于不经常使用,但涉及安全或者限制的场所。 ②方向分类(水平、垂直) 水平作业域是人于台前,在台面上左右运动手臂形成的轨迹范围。(工作台长宽的设计需要水平作业域) 3)垂直作业域 把手臂伸直,以肩关节为轴作上下运动所形成的范围。(搁板、拉手、挂件的设计)
拉手的设计最佳位置: 高度一般90—100厘米。 办公室100厘米 家庭80—90厘米。 二、动态作业空间 1)定义:人体处于动态时的全身动作空间。 人体移动占用的空间不仅仅考虑人体本身占用的空间,还包括运动中肢体的摆动、身体回旋余地等需要的空间。 2)分类: ①姿态的变换:指人从正立姿势变换成其它各种姿势时形成的人体活动空间。 ②人体的移动:从一个位置产生位移到另一个新的位置形成的人体活动空间。 注意问题——全面考虑人与物的关系
全球全年太阳视运动轨迹图解析 很多人都对太阳视运动轨迹不是很清晰,它牵涉到影子朝向、太阳高度角以及地方时的计算等知识,所以为大家所关注,这里就对全球任何纬度上全年任何时刻太阳视运动一天之内的轨迹图进行比较详细的解析,希望对大家的理解有所帮助。同时如有不对之处请各位指正,不胜感激。 一、前提知识储备 太阳视运动轨迹跟太阳直射点的位置有直接的关系,所以要把太阳视运动轨迹弄清楚,首先要把教材上二分二至日太阳照射图弄明白。 图1图2 从上面三个图要清楚以下这些知识点: 1、与晨昏线相交的纬线上,日出日落时太阳高度角为零;反之没有与晨昏线相交的纬线上,日出日落时太阳高度角不为零,如图1北极圈以北的纬线上,图3南极圈以南的纬线上; 2、上面三个图既反映了地方时为12时的太阳高度角大小,也反映了地方时为0时的太阳高度角大小;换个角度说,上面三个图既反映了地方时为12时的太阳视方位,也反映了地方时为0时的太阳视方位。其中地方时为0时的太阳视方位和太阳高度角对于在极昼范围以内的地方有意义; 3、有人有这样的误区“既然太阳光为平行光线,所以全球任何地点的太阳视方位是相同的。”,这个观点错在没有考虑“地球表面为曲面”的因素。 图4 图5 通过比较图4和图5,相信可以走出上面提到的误区。 二、把握三种情况六个区域 由于太阳视运动轨迹跟太阳直射点的关系,所以我们只分析太阳直射赤道、北半球、南半球这三种情况即可。 六个区域是根据太阳视运动轨迹的不同,把地球表面分为六个区域,分别是:赤道、直射点与刚好出现极昼的纬线圈之间(为了方便,以下简称极昼圈,反之简称极夜圈)、直射点与极夜圈之间、极昼圈、极昼圈与极点之间、极点。
振动筛的几种运动轨迹 振动筛分设备的动力源振动电机可产生圆形、椭圆形、直线形、复合形运动方式。 振动筛分设备一向利用振动电机作为简单可靠而有效的动力。振动电机在振动机体上不同的安装组合形式,可产生不同的振动轨迹,从而有效完成各种作业。 直线型振动:振动体(振动箱体和物料)的振动轨迹在水平面及垂直面上的投影都是直线者,其振动形式称为直线型振动。此类型的振动筛即被称为直线振动筛或直线筛。将两台相同型号的振动电机安装在振动设备机体上,使两个振动电机转轴处于互相平行的位置,运行时两台振动电机转向相反,则两台振动电机运转必然同步,机体产生直线型振动。 圆或椭圆振动:振动体的振动轨迹在水平面上的投影是一条直线,而在垂直面上的投影为一圆或椭圆者,其振动形式称为圆或椭圆型振动。此类振动筛即被称为圆振动筛或圆振筛。通常将一台振动电机安装在振动机械的机体上,即可产生这种运动。圆形或椭圆形振动发生在与振动电机转轴相垂直的平面上,其形式则看振动电机与整机重心的相对位置而定。 复合振动:振动体的振动是由两组激振系统产生的,其振动形式称为复合振动。一般有双频复合型及双幅复合型两种形式。某些特殊性能的振动筛分设备,使用两台不同型号不同转速的振动电机,分装于筛分设备的受料端和出料端,使受料端呈现大振幅低频率的振动,同时出料端呈现小振幅高频率的振动,筛分设备的中部重叠两种振动,使筛分设备起到更有效的筛分作用。 旋振动又称三维振动:振动体的振动轨迹在水平面上的投影是一圆或椭圆,其振动形式称为旋振动。此类振动筛即被称为旋振筛。旋振动又可分为平旋型振动、涡旋型振动和复旋型振动三种形式。当振动体的振动轨迹在垂直面上的投影为一水平直线者,其振动形式称为平旋型振动;当振动体的轨迹在垂直面上的投影为一斜直线者,其振动形式称为涡旋型振动;当振动体的振动轨迹在垂直面上的投影为一圆或椭圆者,其振动形式称为复旋型振动。通常由立式振动电机激振的振动设备产生旋
中国古代经济重心的变迁 中国古代社会的经济发展水平,在相当长的一段历史时期内,曾处于世界领先水平。但中国辽阔的疆域导致在经济发展过程中,各地区之间呈现出巨大的不平衡性。就整个中国古代经济的历史发展轨迹来看,经济发展的重心是由北向南逐步转移的。我国在封建社会初期及鼎盛时期,黄河流域的经济发展水平一直居于先进地位,后来长灌流域的经济逐步发展,并赶上和超过了黄河流域,这一转变的完成时期大致在五代和北宋时期。 早在春秋战国时期,黄河中下游地区由于普遍使用了换器、牛耕,再加上先进的农业生产技术的发明和推广,水利工程的兴修等,使北方的农业、手工业、商业的发展水平都占绝对优势。三国时期,黄河流域大批农民为逃避战乱,南迁长江流域,并带去先进的生产技术,同江南人民一道劳动,使江南地区得到了初步的开发。西晋末年,北方又有大批农民为逃避民族压迫和战乱,流亡到江南。到东晋、南朝时,由于南方社会秩序较为安定,长江中下游地区得到进一步开发,南方的生产力水平又有了很大提高。隋唐时期,南方经济继续得到发展。大运河的开凿,也从一个侧面反映出江南经济的重要。唐朝中后期,封建经济继续向闽江、珠江流域扩展,广州是当时南方的大都会,对外贸易发达,由此可见当时南方经济的繁荣。 到了五代十国时期,由于南方战祸较少,相对安定,而北方又有在批劳动力为避战乱逃亡江南,使南方经济又获得更大程度的发展。大约在这一时期,南方的经济发展水平已开始超过北方。经济重心已由北方转移到南方,此后这一趋势不断加剧,到南宋时,南方经济已占绝对优势,当时太湖周围地区已成为全国农业产量较高的区域。“苏湖熟,天下足”的谚语生动地反映了这一状况。宋元时期对外贸易的出口,大多集中在东南沿海地区。元朝开通漕运和海运路线,其目的就是实现南粮北调。可以说,元大都的繁华,有赖于南方经济的强大支撑。明清时期,江南经济继续发展,在农业、手工业全面发展的基础上,商品经济也得到前所未有的发展。明朝时,全国出现了30多个城市,且大多数处在江南地区。 到明朝中后期,在商品经济发达的江南地区,出现了资本主义生产关系的萌芽,并在清朝前期得到缓慢发展。 我国古代经济重心之所以由原来的黄河中下游地区转移到江南,这是当地所在自然环境与整个社会生产力之间辩证发展的必然结果。黄河流域地处温带,四季分明,而平原广阔,土质疏松;江南地区则气候湿润,雨量充沛,而地多丘陵,土质坚实。我国是一个农业国家,古代经济以农业为主。当上古时期,由于生产力水平十分低下,农业种植在黄河中下游地区不仅来得早,且发展得更为容易。因此,黄河中下游地区首先成为我国古代经济的重心。但秦汉以后,生产力水平的提高,再加上黄河中下游地区的频繁战争,使这一地区的经济遭到破坏,而江南地区相对处于比较安定的环境,这吸引了大批逃避战乱的北方人口,这为江南地区的开发提供了十分有利的条件。自唐代中叶以后,江南水稻的产量在全国粮食生产中的比重日益增加,从而有了“天下江淮为国命”之说。(作者单位:梅河
全自主移动双轮平衡车轨迹规划及平衡特性分析全自主移动双轮平衡车是一种动态稳定的轮式移动机器人,其近年来己成为机器人研究的一个热点。与传统的静态轮式移动机器人相比,其机械本体通常被设计成高重心、小占地面积。由于全自主移动双轮平衡车以倒立摆原理为基础,故需要不断消耗能量来维持自身平衡。 稳定性是全自主移动双轮平衡车必须具备的首要性能,其不仅表现在前进/后退等简单运动中,还在转向等复杂运动中更为重要。因为全自主移动双轮平衡车通过两个同轴的电机的协作来控制其运动。本研究课题以全自主移动双轮平衡车的结构为基础,分析其动力学和运动学特点,创新的利用轨迹规划的方法提高全自主移动双轮平衡车转向运动过程中的稳定性,使其以一较快的速度匀速沿既定轨迹曲线运动且无碰撞。 本课题的主要研究内容分为以下四个部分:1.建立全自主双轮平衡车动力学和运动学数学模型,以动力学模型为基础分析其平衡特性,通过运动学模型分析其在转向过程中临界倾斜情况下曲率与速度的关系,确定其运动轨迹的最大曲率值。2.根据A*路径搜索算法生成轨迹的不连续性,提出基于A*算法的三次 B-spline曲线轨迹规划方法。在原有A*路径搜索算法生成无碰撞路径的基础上,利用三次B-spline曲线平滑路径,使得轨迹曲线具有C2连续性,避免了全自主移动双轮平衡车不停地在路径点处启动、停止和原地转向。 3.考虑到生成轨迹曲线可能与障碍物发生碰撞,以及曲率并不一定满足全自主移动双轮平衡车运动轨迹曲率的要求,提出基于控制点修正的曲线曲率控制方法。首先对轨迹曲线进行碰撞分析,然后结合A*路径搜索算法和三次B-spline 曲线的性质,确定控制点移动位置,最终实现对轨迹曲线曲率的控制。 4.验证移动
第17卷第5期审计与经济研究 V ol.17,№.542000年09月 ECONOMY &AU DIT ST U DY S e p .,2002 [收稿日期]2002—06—17 [作者简介]刘宇伟(1969-),男,江苏滨海人,上海财经大学国际工商管理学院博士生,从事市场营销学史研究。 营销渠道理论发展及其重心演变 (上海财经大学国际工商管理学院,上海200083) 刘宇伟 营销渠道研究是营销学研究的中心之一。本文着重回顾西方的渠道理论研究的发展,以期引起我国学术界的注意,并为我国企业提供借鉴。 一、以效率和效益为重心的营销渠道理论一般认为,韦尔德(1916)是渠道研究的奠基人。他首先论及营销渠道的效率,认为职能专业化产生经济效益,专业化的中间商所从事的分部营销因而是合理的。巴特尔(1923)强调中间商为生产者和消费者创造基本效用、形式效用、地点效用和时间效用。布瑞耶(1934)认为,营销机构能够有效地克服交换的障碍和阻力,因为它可以集中和分配所需要素。康弗斯和胡基(1940)研究了营销纵向一体化的潜在优势,即营销费用的降低和原材料或商品销路的确定性,同时他们指出,一体化也带来了相应的管理和协调问题。 1954—1973年间,渠道理论研究达到一个高 峰。营销学者利用经济学理论分析营销渠道产生、结构演变、渠道设计等问题。奥德逊(1954)认为经济效率标准是影响渠道设计和演进的主要因素。分销网络的存在使得专业化大规模生产和千差万别的消费需求的满足得以实现,因此中间商创造了时间、地点和占有效用。巴尔德斯顿(1964)分析了企业进行渠道设计应注意的问题:第一,超越利润最大化假定而使企业使命多样化;第二,大企业需以参与市场的相对效率和内部管理控制为标准评价渠道方案;第三,注意企业单一渠道与复合渠道设 计之间的区别。麦克马蒙(1965)认为,由于资本需要不断增加,固定成本渐增,边际利润率和投资回报率下降,营销过程日益复杂,协调营销体系的潜在经济效益日益明显,可以用公司型、管理型和契约型三种方式,有效地协调营销渠道体系。巴克林 (1965)着重研究了延期和投机的概念,认为综合延 期和投机,可以分析在营销渠道中的存货阶段。 以效率和效益为重心的研究主要基于与效率有关的经济学概念,而对营销渠道中的行为变量缺乏相应的研究,因而此后很少具有重大价值的研究成果。 二、以权力和冲突为重心的营销渠道理论以权力和冲突为研究重心的学者将渠道看作渠道成员间既有合作又有竞争的联合体。斯特恩 (1969)认为,渠道由一组专业机构组成,劳动分工 广泛,每个成员在某种程度上依赖其他成员,如果某个成员对其他成员的依赖性较大,那么后者将更有权力;如果一个成员对渠道的承诺减少,那么渠道的其他成员影响他的能力将降低。依存和承诺是理解渠道中权力关系的关键。斯特恩研究了分销渠道中的冲突,认为渠道成员被锁定在相互依存的网络中,如果一个成员认为其他成员阻碍其实现目标,将不可避免地发生冲突。此后,许多营销学者研究了权力、冲突、合作和谈判等问题。 11权力的来源、使用和衡量。拉斯切和布朗(1982)认为渠道领导者成功实施非经济权力来源, [关键词]营销渠道;理论发展;历史[摘 要]随着市场竞争态势的变化和营销学的发展,渠道理论研究重心不断转移,从以效率和效益为重心, 逐步转向以权力和冲突为重心,最终转向以关系和联盟为重心的研究。 [中图分类号]F710 [文献标识码]A [文章编号]1004-4833(2002)05-0057-03
第六章 点的运动学 一、要求 1、能用矢量法建立点的运动方程,求速度和加速度。 2、能熟练地应用直角坐标法建立点的运动方程,求轨迹、速度和加速度。 3、能熟练地应用自然法求点在平面上作曲线运动时的运动方程、速度和加速度,并正确 理解切向加速度和法向加速度的物理意义。 二、重点、难点 点的曲线运动的直角坐标法,点的运动方程,点的速度和加速度在直角坐标轴上的投影。点的曲线运动的自然法(以在平面内运动为主),点沿已知轨迹的运动方程,点的切向加速度与法向加速度。 三、学习指导 点的运动学是整个运动学的基础。三种方法描述同一点的运动,其结果是一样的。如果将矢量法中的矢量r 、v 、a 用解析式表示,就是坐标法;矢量v 、a 在自然轴投影,就得出自然法中的速度与加速度。 直角坐标系与自然轴系都是三轴相互垂直的坐标系。直角坐标系是固定在参考系上,可用来确定每一瞬时动点的位置。点沿空间曲线运动有三个运动方程,点沿平面曲线运动有两个运动方程,点沿直线运动有一个运动方程。自然轴系是随动点一起运动的直角轴系(切向轴τ、法向轴n 及副法向轴b ),因此不能用自然轴系确定动点的位置。自然法以已知轨迹为前提,用弧坐标来建立点的运动方程,以确定动点每一瞬时在轨迹上的位置。 用直角坐标法求速度和加速度是将三个坐标分别对时间取一次和二次导数,得到速 度和加速度在三轴上的投影,然后再求它的大小和方向。用自然法求速度,则将坐标对时间取一次导数,就得到速度的大小和方向。自然法中的加速度物理概念清楚,τa 和n a 分别反映了速度大小和速度方向改变的快慢程度。需注意的是不能将dt dv 误认为是动点的全加速 度。只有当0=n a 时,才有dt dv a = 。学员可自行分析,这时点作什么运动。 下面对矢量法、直角坐标法与自然法作一总结和比较:
全球全年太阳视运动轨迹图解析 很多人都对太阳视运动轨迹不是很清晰,它牵涉到影子朝向、太阳高度角以 及地方时的计算等知识,所以为大家所关注,这里就对全球任何纬度上全年任何 时刻太阳视运动一天之内的轨迹图进行比较详细的解析,希望对大家的理解有所 帮助。同时如有不对之处请各位指正,不胜感激。 一、前提知识储备 太阳视运动轨迹跟太阳直射点的位置有直接的关系,所以要把太阳视运动轨 迹弄清楚,首先要把教材上二分二至日太阳照射图弄明白。 从上面三个图要清楚以下这些知识点: 1、与晨昏线相交的纬线上,日出日落时太阳高度角为零;反之没有与晨昏线相 交的纬线上,日出日落时太阳高度角不为零,如图 1 北极圈以北的纬线上, 图 3 南极圈以南的纬线上; 2、上面三个图既反映了地方时为 12 时的太阳高度角大小,也反映了地方时为 0 时的太阳高度角大小;换个角度说,上面三个图既反映了地方时为 12 时的太 阳视方位,也反映了地方时为 0 时的太阳视方位。其中地方时为 0 时的太阳 视方位和太阳高度角对于在极昼范围以内的地方有意义; 3、有人有这样的误区“既然太阳光为平行光线,所以全球任何地点的太阳视方 位是相同的。”,这个观点错在没有考虑“地球表面为曲面”的因素。 通过比较图 4 和图 5 ,相信可以走出上面提到的误区。 二、把握三种情况六个区域 由于太阳视运动轨迹跟太阳直射点的关系,所以我们只分析太阳直射赤道、 北半球、南半球这三种情况即可。 六个区域是根据太阳视运动轨迹的不同,把地球表面分为六个区域,分别是: 赤道、直射点与刚好出现极昼的纬线圈之间(为了方便,以下简称极昼圈,反之 简称极夜圈)、直射点与极夜圈之间、极昼圈、极昼圈与极点之间、极点。 N 图3