四象限变流器双闭环电流控制的研究摘要:介绍了四象限变流器的工作原理,并在此基础上推导出四象限变流器的数学模型。通过四象限变流器双闭环直接电流控制的数学模型搭建了仿真框架,最后通过MATLAB/Simulink进行了仿真研究,结果表明基于双闭环直接电流控制的四象限变流器具有很好的稳态和瞬态性能,网侧功率因数接近于1。叙词:谐波污染功率因数直接电流控制Abstract:The four-quadrant converter mathematical model is derived by its operation principle and working conditions and then the simulation is built according to its mathematical model. The simulation which is used by MATLAB/Simulink proved that double-loop direct current control is an effective way to achieve stable output DC voltage, suppress the harmonics effectively and achieve the net power factor close to 1. Keyword:Harmonic pollution, Power factor, Direct current control
1 引言
随着电力电子装置的广泛使用,由此引起的谐波污染问题逐渐受到了人们的重视。整流装置是谐波主要的来源,因此有必要研制高功率因数、低谐波整流器以消除谐波源。与传统的二极管不控整流、相控整流相比,四象限变流器具有功率因数高、直流侧电压稳定、输入电流谐波小、开关损耗小、电磁污染少等优点[3]。
四象限变流器的控制策略主要有间接电流控制和直接电流控制两种。间接电流控制通过调节变流器交流侧电压的幅值和相位达到控制输入电流的目的[1]。双闭环直接电流控制在间接电流控制的基础上引入网侧输入电流反馈,具有动态响应速度快、网侧输入电流谐波小和直流侧输出电压稳定等优点[1]。本文首先介绍了四象限变流器的工作原理和数学模型,比较了基于直接电流控制与间接电流控制的四象限变流器工作性能,在此基础上研究了直接电流控制四象限变流器的控制模型与PI参数设计。最后,通过仿真结果验证了本文提出的直接电流控制四象限变流器具备优良的稳态和瞬态工作性能。
2 工作原理
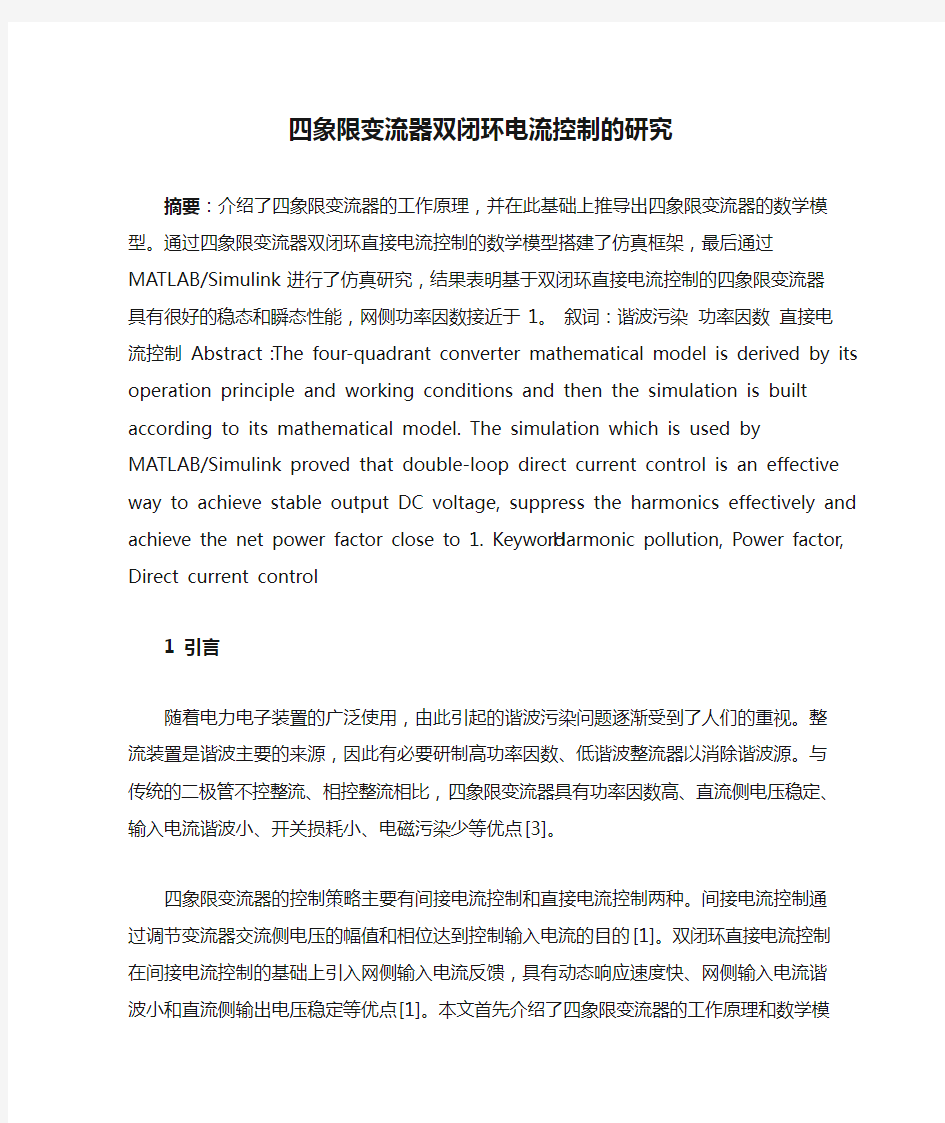
四象限变流器的主电路结构如图1所示。其中UN为输入电压;电感LN为网侧等效电感,起到传递能量、抑制高次谐波、平衡桥臂终端电压和电网电压的作用;RN为网侧电阻;T1~T4为全控型开关器件(如MOSFET、IGBT等);D1~D4为续流二极管;Cdc 为滤波电容,为高次谐波电流提供低阻抗通路,减少直流电压纹波;C2、L2分别为二次滤波电容和电感;RL为负载电阻;Udc为直流侧输出电压。
图1 四象限变流器主电路
采用单极性调制的时候,变流器交流侧电压Uab将在Udc,0或0,-Udc之间切换。因此,单相四象限变流器主电路的数学模型为:
(1)
式中:S(t)整流器开关函数。
3 双闭环控制四象限变流器
3.1 直接电流控制与间接电流控制的比较
直接电流控制,是一种通过直接控制交流电流而使其跟踪给定电流信号的控制方法。控制器具有电流控制环,通过直接对电流调节,使电流快速地跟踪给定值,因此,直接电流控制四象限变换器具有很好的动态性能。另外对电流给定值限幅可以很好地限制输出电流幅值。
间接电流控制也称为相位幅值控制,它通过控制逆变器输入电压的幅值和相位来间接控制输入电流。这种控制方式的稳定性很差,系统动态响应慢,在暂态过程中交流电流可能会出现直流偏移问题和很大的电流过冲。所以尽管幅相位控制已提出了10多年时间,但在实际系统和装置中几乎不被采用。
3.2控制模型的建立
根据四象限变流器的控制原理,得到图2所示四象限变流器双闭环控制框图。
图2 双闭环直接电流控制原理
图中U*d为中间直流侧输出电压给定值,Ud为中间直流环节输出电压,Id为中间直流环节输出电流。为了减轻直流环节中电压环PI调节器的负荷,改善PI调节器的动态响应,用直流环节电流Id计算给定电流的有效分量I*s2,其结果与I*s1相加后作为交流电流的给定值I*s。由图可得电流给定值I*s为:
3.3双闭环直接电流控制PI参数的设计
3.3.1 电流内环的设计
电流内环使输入电流跟踪指令电流,能够提高系统的动态响应能力。考虑到参数准确性和漂移,以及实现电流控制无静差,本文选用PI调节器,控制框图如图3所示。
图3 电流内环控制器
考虑到电流内环需要获得较快电流跟踪性能,设计PI调节器的零点抵消电流控制对象传递函数的极点,即
3.3.2电压外环的设计
假设直流端的滤波电容足够大,则可忽略直流电压纹波扰动,电压外环控制器如图4所示。
图4 电压外环控制器
得到电压外环的开环传递函数为:
4 仿真结果分析
根据仿真模型,利用数学工具MATLAB/Simulink对本文提出的直接电流控制四象限变流器进行验证。参数设计如下:
交流侧:网侧交流电压Us=1500V,频率fs=50HZ,线路电阻RS=0.2Ω,线路电感Ls=1.19mH;直流侧: 输出电压指令Ud=3000V,电容Cd=0.01F,二次滤波环节
C2=3mF,电感L2=0.84mH;电流内环PI参数为:Kip=4.55,Kli=210,电压外环PI参数为:Kvp=0.5,Kvi=291。
运用双闭环直接电流控制,启动过程的仿真结果如图5所示。从图中可以看出,双闭环直接电流控制启动电流波动比较小,动态响应速度快,在0.3s时加上负载后,输入电压和电流的功率因数为1,得到良好的效果。
图5 软启动到加上负载时的仿真波形:(a) 输入电压和输入电流波形;(b)输出电压波形。
增大负载后的仿真波形如图6所示。在负载切换的过程中,输出直流电压跌落30V,波动比较小,网侧输入电压和输入电流在经过1个工频周期后保持同相位,稳定后变流器功率因数接近于1。
图7 额定牵引负载到再生负载时的波形:(a) 输入电压和输入电流波形;(b) 输出电压波形
5 结语
本文分析了四象限变流器的工作原理,提出了四象限变流器的数学模型,建立了双闭环直接电流控制的仿真模型。通过仿真对四象限变流器系统的结构、系统的稳定性、系统的动静态响应以及系统的参数对系统的可靠性、稳定等性能的影响进行了研究。仿真结果表明,双闭环直接电流控制四象限变流器具有良好的动态响应和稳态特性。
變頻器中直流母線電容的紋波電流計算 1 引言 各類電動機是我們發電量的主要消耗設備,而變頻器作為電動機的驅動裝置成為當前“節能減排”的主力設備之一。它一方面可以起到節約能源消耗的作用,另一方面也可以實現對原有生產或處理工藝過程的優化。目前應用最多也最廣的是交-直-交電壓型變頻器,即中間存在直流儲能濾波環節,一般採用大容量電解電容器實現此功能。 使用電解電容器的作用主要有以下幾個[1]: (1)補償以電源頻率兩倍或六倍變化的逆變器所需功率與整流橋輸出功率之差; (2)提供逆變器開關頻率的輸入電流; (3)減小開關頻率的電流諧波進入電網; (4)吸收急停狀態時所有功率開關器件關斷下的電機去磁能量;(5)提供暫態峰值功率; (6)保護逆變器免受電網暫態峰值衝擊。 電解電容器設計選型所需要考慮的主要因素有以下幾個:電容器的電壓、電容器量、電容器的紋波電流、電容器的溫升與散熱、電容器的壽命等等。這些因素對變頻器滿足要求的平均無故障時間(MTBF)十分重要。然而電解電容器的紋波電流的計算如何能明確給出計算依據,這是本文所要解決的問題。
2 直流母線電容紋波電流的計算 紋波電流指的是流過電解電容器的交流電流,它使得電解電容器發熱。紋波電流額定值的確定方法是在額定工作溫度下規定一個允許的溫升值,在此條件下電容器符合規定的使用壽命要求。當工作溫度小於額定溫度時,額定紋波電流可以加大。但過大的紋波電流會大大縮短電容器的耐久性,當紋波電流超過額定值,紋波電流所引起的內部發熱每升高5℃,電容器器的壽命將減少50%。因此當要求電容器器具有長壽命性能時,控制與降低紋波電流尤其重要。 但在實際設計過程中,電解電容器的紋波電流由於受變頻器輸入輸出各物理量變化以及控制方式等的影響很難直接計算得到[2],一般多採用根據實際經驗估算大小,如每μf電容器要求20ma紋波電流之類的經驗值,或者通過電腦模擬來估算[3~6]。 本文根據對變頻器電路拓撲與開關調製方式的分析,並借鑒已有文獻資料,歸納出一個直接的計算電解電容器紋波電流的方法,供大家參考。 圖1 變頻器拓撲示意圖 由圖1可以得到直流母線電容的紋波電流ic=il-i,il和i分別是整流器
双 闭 环 直 流 调 速 系 统 姓名: 学号: 专业:电气工程及其自动化 日期:2015年12月23日
摘要 直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。该系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差,从而使系统达到调节电流和转速的目的。该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流。 关键词:双闭环,转速调节器,电流调节器 双闭环直流调速系统的设计 双闭环直流调速系统中设置了两个调节器, 即转速调节器(ASR)和电流调节器(ACR), 分别调节转速和电流, 即分别引入转速负反馈和电流负反馈。 两者之间实行嵌套连接,且都带有输出限幅电路。转速调节器 ASR 的输出限幅电压*im U 决定了电流给定电压的最大值;电流调节器 ACR 的输出限幅电压cm U 限制了电力电子变换器的最大输出电压dm U 。 由于调速系统的主要被控量是转速, 故把转速负反馈组成的环作为外环, 以保证电动机的转速准确跟随给定电压, 把由电流负反馈组成的环作为内环, 把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE ,这就形成了转速、电流双闭环调速系统。
仿真设计报告
转速、电流双闭环直流调速系统的Simulink仿真设计 一、系统设计目的 直流调速系统具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动中获得了广泛应用。根据直流电动机的工作原理建立了双闭环直流调速系统的数学模型,并详细分析了系统的原理及其静态和动态性能。按照自动控制原理,对双闭环调速系统的设计参数进行分析和计算,利用Simulink对系统进行了各种参数给定下的仿真,通过仿真获得了参数整定的依据。在理论分析和仿真研究的基础上,设计了一套实验用双闭环直流调速系统。对系统的性能指标进行了实验测试,表明所设计的双闭环调速系统运行稳定可靠,具有较好的静态和动态性能,达到了设计要求。采用MATLAB 软件中的控制工具箱对直流电动机双闭环调速系统进行计算机辅助设计,并用SIMULINK进行动态数字仿真,同时查看仿真波形,以此验证设计的调速系统是否可行。 二、系统理论分析 2.1双闭环直流调速系统工作原理 电动机在启动阶段,电动机的实际转速低于给定值,速度调节器的输入端偏差信号,经放大后输出的电压保持为限幅值,速度调节器工作在开环状态,速度调节器的输出电压作为电流给定值送入电流调节器,此时以最大电流给定值使电流调节器输出移相信号直流电压迅速上升,电流也随即增大直到最大给定值,电动机以最大电流恒流加速启动。电动机的最大电流可通过整定速度调节器的输出限幅值来改变。在转速上升到给定转速后,速度调节器输入端的偏差信号减小到近于零,速度调节器和电流调节器退出饱和状态,闭环调节开始起作用。对负载引起的转速波动,速度调节器输入端偏差信号将随时通过速度调节器、电流调节器修正触发器的移相电压,使整流桥输出的直流电压相应变化校正和补偿电动机的转速偏差。另外电流调节器的小时间常数,还能对因电网波动引起的电枢电流的变化进行快速调节,可在电动机转速还未来得及发生改变时,迅速使电流恢
变频器直流母线电容纹波电流计算方法 各类电动机是我们发电量的主要消耗设备,而变频器作为电动机的驱动装置成为当前“节能减排”的主力设备之一。它一方面可以起到节约能源消耗的作用,另一方面也可以实现对原有生产或处理工艺过程的优化。目前应用最多也最广的是交-直-交电压型变频器,即中间存在直流储能滤波环节,一般采用大容量电解电容器实现此功能。 使用电解电容器的作用主要有以下几个: (1)补偿以电源频率两倍或六倍变化的逆变器所需功率与整流桥输出功率之差; (2)提供逆变器开关频率的输入电流; (3)减小开关频率的电流谐波进入电网; (4)吸收急停状态时所有功率开关器件关断下的电机去磁能量; (5)提供瞬时峰值功率; (6)保护逆变器免受电网瞬时峰值冲击。 电解电容器设计选型所需要考虑的主要因素有以下几个:电容器的电压、电容器量、电容器的纹波电流、电容器的温升与散热、电容器的寿命等等。这些因素对变频器满足要求的平均无故障时间(mtbf)十分重要。然而电解电容器的纹波电流的计算如何能明确给出计算依据,这是本文所要解决的问题。 直流母线电容纹波电流的计算 纹波电流指的是流过电解电容器的交流电流,它使得电解电容器发热。纹波电流额定值的确定方法是在额定工作温度下规定一个允许的温升值,在此条件下电容器符合规定的使用寿命要求。当工作温度小于额定温度时,额定纹波电流可以加大。但过大的纹波电流会大大缩短电容器的耐久性,当纹波电流超过额定值,纹波电流所引起的内部发热每升高5℃,电容器器的寿命将减少50%。因此当要求电容器器具有长寿命性能时,控制与降低纹波电流尤其重要。 但在实际设计过程中,电解电容器的纹波电流由于受变频器输入输出各物理量变化以及控制方式等的影响很难直接计算得到,一般多采用根据实际经验估算大小,如每μf电容器要求20ma纹波电流之类的经验值,或者通过计算机仿真来估算[3~6]。 本文根据对变频器电路拓扑与开关调制方式的分析,并借鉴已有文献资料,归纳出一个直接的计算电解电容器纹波电流的方法,供大家参考。
课程设计说明书 课程名称:电力拖动自动控制系统 设计题目:转速电流双闭环直流调速系统 院系: 学生姓名: 学号: 专业班级: 指导教师:
2010年12 月30 日
转速电流双闭环直流调速控制系统 摘要:此设计利用晶闸管、二极管等器件设计了一个转速、电流双闭环直流调速系统。该系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差,从而使系统达到调节电流和转速的目的。该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流。 关键词:双闭环,晶闸管,转速调节器,电流调节器
目录 第一章.直流拖动控制系统总体设计 (1) 一、直流调速系统拖动方案的对比 (1) 二、直流调速系统控制方案的确定 (2) 三、直流电动机的调速方式 (2) 第二章.主电路参数计算和保护环节设计 (3) 一、整流变压器额定参数的计算 (3) 二、主电路器件的计算与选择 (3) 三、主电路保护环节的设计与计算 (3) 四、电抗器参数计算与选择 (4) 第三章.调速系统控制单元的确定和调整 (4) 一、检测环节 (4) 二、调节器的选择与调整 (5) 三、系统的给定电源 (11) 第四章.触发电路的设计 (12) 第五章.调速系统动态参数的工程计 (12) 心得体会 (12) 参考文献 (13) 附件.课程设计要求 (13)
& 《运动控制系统》课程设计 ) 题目:转速电流双闭环直流调速系统仿真与设计,
转速电流双闭环直流调速系统仿真与设计 ? 1. 设计题目 转速电流双闭环直流调速系统仿真与设计 2. 设计任务 已知某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下: 1)直流电动机:160V、120A、1000r/min、C e=r,允许过载倍数λ= 2)晶闸管装置放大系数:K s=30 3)电枢回路总电阻:R=Ω 4)时间常数:T l=,T m=,转速滤波环节时间常数T on取 5)\ 6)电压调节器和电流调节器的给定电压均为10V 试按工程设计方法设计双闭环系统的电流调节器和转速调节器,并用Simulink建立系统模型,给出仿真结果。 系统要求: 1)稳态指标:无静差 2)动态指标:电流超调量σi ≤5%;空载起动到额定转速时超调量σn ≤10% 3. 设计要求 根据电力拖动自动控制理论,按工程设计方法设计双闭环调速系统的步骤如下: 1)设计电流调节器的结构和参数,将电流环校正成典型I型系统; 2)| 3)在简化电流环的条件下,设计速度调节器的结构和参数,将速度环校正成典型II型系统; 4)进行Simulink仿真,验证设计的有效性。 4.设计内容
1)设计思路: 带转速负反馈的单闭环系统,由于它能够随着负载的变化而相应的改变电枢电压,以补偿电枢回路电阻压降的变化,所以相对开环系统它能够有效的减少稳态速降。 当反馈控制闭环调速系统使用带比例放大器时,它依靠被调量的偏差进行控制的,因此是有静差率的调速系统,而比例积分控制器可使系统在无静差的情况下保持恒速,实现无静差调速。 对电机启动的冲击电流以及电机堵转时的堵转电流,可以用附带电流截止负反馈作限流保护,但这并不能控制电流的动态波形。按反馈的控制规律,采用某个物理量的负反馈就可以保持该基本量基本不变,采用电流负反馈就应该能够得到近似的恒流过程。 另外,在单闭环调速系统中,用一个调节器综合多种信号,各参数间相互影响,难于进行调节器的参数调速。例如,在带电流截止负反馈的转速负反馈的单闭环系统中,同一调节器担负着正常负载时的速度调节和过载时的电流调节,调节器的动态参数无法保证两种调节过程均具有良好的动态品质。 } 按照电机理想运行特性,应该在启动过程中只有电流负反馈,达到稳态转速后,又希望只有转速反馈,双闭环调速系统的静特性就在于当负载电流小于最大电流时,转速负反馈起主要作用,当电流达到最大值时,电流负反馈起主要作用,得到电流的自动保护。 2)双闭环调速系统的组成: a.系统电路原理图 图2-1为转速、电流双闭环调速系统的原理图。图中两个调节器ASR和ACR 分别为转速调节器和电流调节器,二者串级连接,即把转速调节器的输出作为电流调节器的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置。电流环在内,称之为内环;转速环在外,称之为外环。 两个调节器输出都带有限幅,ASR的输出限幅什U im 决定了电流调节器ACR 的给定电压最大值U im ,对就电机的最大电流;电流调节器ACR输出限幅电压U cm 限制了整流器输出最大电压值,限最小触发角α。
四象限变流器控制策略的探讨 1,概述 交流传动技术是我国铁路牵引动力发展的主要方向。对于单相供电牵引主变流器来说,电源侧四象限变流器是整个牵引系统的重要组成部分,对四象限变流器的控制策路对电网中的动率因数和电网电流中的高次谐波的含量有着决定性的影响。对四象限变流器的控制必须达到以下两个目的:①但电网电压或负载发生变化时,维持中间回路直流电压的恒定;②使电网电流接近正弦波,电网功率因数接近于1,电网电流中的高次谐波的含量尽可能小,满足轨道电路对谐波电流限值的要求。 2,单相四象限变流器工作原理 2.1,单相四象限变流器主电路原理图 图1 单个四象限变流器主电路原理图 图1中:方框部分是变压器牵引绕组的等效电路,L N 和R N 分别为折合到二次侧的牵引变压器绕组的漏感和电阻。L2 和C2 构成二次滤波回路, C d 为直流侧支撑电容。U N 为变压器二次侧电压矢量, I N1 为变压器二次侧电流的基波矢量, V1~V4 为可关断电力电子开关器件, D1~D4 为功率二极管, 通过对V1~V4 进行适当的导通与关断控制可以对直流侧电压进行调制, 从而在四象限变流器的输入端A、B生成一个与电网同步的脉宽调制波,记为 U S 。 2.2,单相四象限变流器交流电网侧等效电路 对于图1所示的单相四象限变流器主电路原理图,交流电网侧电路可以等效为图2。 图2 四象限变流器交流电网侧等效电路图
图2 四象限变流器交流电网侧等效电路图 2.3, 二次侧交流回路电压方程 由图2可以得到二次侧交流回路的矢量电压方程: U N= U s-I N R N-jωL N I N ⑴ 假设U N和U S之间的相位差为Ψ,在牵引工况下, U N和I N的相位差应为0°,则用该方程表示牵引工况的矢量如图3(a) 所示,此时U S滞后I N;而对于再生制动工况, U N和I N的相位差应为180°,该工况下的矢量如图3 (b) 所示,此时US超前U N。 (a) 牵引工况 (b) 再生工况 图3 四象限变流器控制矢量图 由方程(1) 和矢量图可知: 如果变压器二次侧电压U N和电感I N为已知量,那末只要控制了U S的幅值和相位,也就控制了I N的幅值和相位。反之,只要控制了I N的幅值和相位,也就控制了U S的幅值和相位,因此方程(1) 是实现四象限变流器控制的基本公式。通常采用的双闭环控制的原理就是由此而来,它是通过控制U S的幅值来调节I N的相位,保证交流侧电网的基波功率因数为1;而通过调节U S的相位来调节I N的幅值,保证直流侧电压U d的稳定。 3,单相四象限变流器控制策略 要使四象限变流器工作时达到单位功率因数,必须对电流进行控制,保证其为正弦且与电压同相或反相。根据有没有引入电流反馈可以将这些控制方法分为两种:没有引入交流电流反馈的称为间接电流控制,间接电流控制也称为相位幅值控制;引入交流电流反馈的称为直接电流控制。 3.1间接电流控制 ⑴间接电流控制工作原理 间接电流控制没有引入交流电流控制信号,而是通过控制四象限变流器的交流输入端电压,间接控制输入电流,故称间接电流控制。又因其直接控制量为电压,所以又称为相位幅值控制。间接电流控制具体的数学公式为: I N1=K p(U dg-U d)+1/T i∫(U dg-U d)dt I N2= I d I d /U N I N= I N1 + I N2
转速电流双闭环直流调速系统仿真 摘要:本设计主要研究了直流调速转速电流双闭环控制系统以及对MATLAB软件的使用。系统模型由晶闸管-直流电动机组成的主电路和转速电流调节器组成的控制电路两部分组成。主电路采用三相可控晶闸管整流电路整流,用PI调节器控制,通过改变直流电动机的电枢电压从而进行调压调速。控制电路设置两个PI调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈。二者实行嵌套连接,把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE,形成转速电流双闭环直流调速系统。在Simulink中建立仿真模型,设置各个模块的参数,仿真算法和仿真时间,运行得出仿真模型的波形图。通过对波形图的分析,说明直流调速转速电流双闭环控制系统具有良好的静态和动态特性。 关键词:双闭环直流调速系统,MATLAB/SIMULINK仿真,ASR,ACR。 课程概述:直流调速是现代电力拖动自动控制系统中发展较早的技术。随着交流调速的迅速发展,交流调速技术越趋成熟,以及交流电动机的经济性和易维护性,使交流调速广泛受到用户的欢迎。但是直流电动机调速系统以其优良的调速性能仍有广阔的市场,并且建立在反馈控制理论基础上的直流调速原理也是交流调速控制的基础。采用转速负反馈和PI调节器的单闭环调速系统可以在保证系统稳定的条件下实现转速无静差。但如果对系统的动态性能要求较高,如要求快速起制动、突加负载动态速降时,单闭环系统就难以满足。这主要是因为在单闭环系统中不能完全按照需要来控制动态过程中的电流或转矩。在单闭环系统中,只有电流截至负反馈环节是专门用来控制电流的,但它只是在超过临界电流值以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。实际工作中,在电机最大电流受限的条件下,充分利用电机的允许过载能力,最好是在过渡过程中始终保持电流转矩为允许最大值,使电力拖动系统尽可能用最大的加速度启动,到达稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。实际上,由于主电路电感的作用,电流不能突跳,为了实现在允许条件下最快启动,关键是要获得一段使电流保持为最大值的恒流过程,按照反馈控制规律,电流负反馈就能得到近似的恒流过程。问题是希望在启动过程中只有电流负反馈,而不能让它和转速负反馈同时加到一个调节器的输入端,到达稳态转速后,又希望只要转速负反馈,不要电流负反馈发挥主作用,因此需采用双闭环直流调速系统。这样就能做到既存在转速和电流两种负反馈作用又能使它们作用在不同的阶段。其次并基于双闭环的电气原理图的SIMULINK的仿真,分析了直流调速系统的动态抗干扰性能。采用工程设计方法
对滤波效果而言,电容的ESL和ESR参数都很重要,电感会阻止电流的突变,电阻则限制了电流的变化率,这些影响对电容的充放电显然都不利。优质的电容在设计及制造时都采取了必要的手段来降低ESL和ESR,故而横向比较起来,同样的容量滤波效果却不同。
漏电流小,ESR小,一般都是认为要选择低ESR的系列,不过也与负载有关,负载越大,ESR不变时,纹波电流变大,纹波电压也变大。我们从公式上来看看,dV=C*di*dt;dv就是纹波,di是电感上电流的值,dt是持续的时间。一般的开关电源书籍都会讲到怎么算纹波,大题分解为:滤波电容对电压的积分+滤波电容的ESR+滤波电容的ESL+noise,如下图: 一般对纹波的计算通常是估算 有关开关电源纹波的计算,原则上比较复杂,要将输入的矩形波进行傅立叶展开成各次谐波的级数,计算每个谐波的衰减,再求和。最后的结果不仅与滤波电感、滤波电容有关,而且与负载电阻有关。当然,计算时是将滤波电感和滤波电容看成理想元件,若考虑电感的直流电阻以及电容的ESR,那就更复杂了。所以,通常都是估算,再留出一定余量,以满足设计要求。对样机需要实际测试,若不能满足设计要求,则需要更改滤波元件参数。 以Buck电路为例,电感中电流连续和断续,开关电源的传递函数完全不同。电流连续时环路稳定,电流断续时未必稳定。而电感中电流是否连续,除与电感量等有关外,还与负载有关。更严重的是,电流是否连续还与占空比有关,而占空比是由反馈电路控制的。不仅Buck,其它如Boost以及由基本拓扑衍生出来的正激、反激等也是一样。 若要求所有可能产生的工作状态下都稳定,通常要加假负载以保证Buck电路电感电流总是连续(对Buck/Boost或反激则保证不会在连续断续之间转变),或者把反馈环路时间常数设计得非常大(这会在很大程度上降低开关电源的响应速度)。对输出电压可调整的开关电源(例如实验室用的0~30V输出电源),环路稳定的难度更大。对这类电源,往往要在开关电源之后再加一级线性调整。 电解电容的选择很重要 在输出端采用高频性能好、ESR低的电容,高频下ESR阻抗低,允许纹波电流大。可以在高频下使用,如采用普通的铝电解电容作输出电容,无法在高频(100kHz以上的频率)下工作,即使电容量也无效,因为超过10kHz时,它已成电感特性了。
课程设计报告 课程课程设计 课题双闭环控制系统设计 班级 姓名 学号
目录 第1章双闭环系统分析 (1) 1.1系统介绍 (1) 1.2系统原理 (1) 1.3双闭环的优点 (1) 第2章系统参数设计 (2) 2.1电流调节器的设计 (2) 2.1.1时间参数选择 (2) 2.1.2计算电流调节参数 (2) 2.1.3校验近似条件 (3) 2.2转速调节器的设计 (3) 2.2.1电流环等效时间常数: (3) 2.2.2转速环截止频率为 (5) 2.2.3计算控制器的电阻电容值 (5) 第3章仿真模块 (6) 3.1电流环模块 (6) 3.2转速环模块 (6) 第4章仿真结果 (7) 4.1电流环仿真结果 (7) 4.2转速环仿真结果 (7) 4.4稳定性指标的分析 (8) 4.4.1电流环的稳定性 (8) 4.4.2转速环的稳定性 (8) 结论 (9) 参考文献 (10)
第1章双闭环系统分析 1.1系统介绍 整流电路可从很多角度进行分类,主要分类方法是:按组成的器件可分为不可控,半控和全控三种;按电路结构可分为桥式电路和零式电路;按交流输入相?数分可分为单相、双相、三相和多相电路;按控制方法又可分为相控整流和斩波?控制整流电路。? 本系统采用的是三相全控桥式晶闸管相控整流电路。这是因为电机容量相对?较大,并且要求直流脉动小、容易滤波。其交流侧由三相电网直接供电,直流侧?输出脉动很小的直流电。在分析时把直流电机当成阻感性加反电势负载。因为电?机电流连续所以分析方法与阻感性负载相同,各参量计算公式亦相同。 1.2系统原理 ASR(速度调节器)根据速度指令Un*和速度反馈Un的偏差进行调节,其输出是电流指令的给定信号Ui*(对于直流电动机来说,控制电枢电流就是控制电磁转矩,相应的可以调速)。? ACR(电流调节器)根据Ui*和电流反馈Ui的偏差进行调节,其输出是UPE(功率变换器件的)的控制信号Uc。进而调节UPE的输出,即电机的电枢电压,由于转速不能突变,电枢电压改变后,电枢电流跟着发生变化,相应的电磁转矩也跟着变化,由Te-TL=Jdn/dt,只要Te与TL不相等转速会相应的变化。整个过程到电枢电流产生的转矩与负载转矩达到平衡,转速不变后,达到稳定。 1.3双闭环的优点 双闭环调速系统属于多环控制系统,每一环都有调节器,构成一个完整的闭环系统。工程设计方法遵循先内环后外环的原则。步骤为:先设计电流环(内环),对其进行必要的变换和近似处理,然后依照电流环的控制要求确定把它校正成哪一种典型系统,再根据控制对象确定其调节器的类型,最后根据动态性能指标的要求来确定其调节器的有关参数。电流环设计完成以后,把电流环看成转速环(外环)中的一个环节,再用同样的方法设计转速环。? 在电流检测信号中常有交流分量,为了不让它影响调节器的输入,加入了低通滤波器,然而滤波环节可以使反馈信号延迟,为了消除此延迟在给定位置加一个相同时间常数的惯性环节。同理,由测速发电机得到的转速反馈电压常含有换向纹波,因此也在给定和反馈环节加入滤波环节。
案例5.3-转速、电流双闭环直流调速系统
案例5.3 转速、电流双闭环直流调速系统 一、概述 晶闸管电动机直流调速系统在工业生产中获得广 泛应用。国内外晶闸管—电动机直流调速装置品种繁多。现以ZCC1系列晶闸管—电动机直流调速装置(简称ZCC1系列)为例,来阐述晶闸管—电动机直流调速系统分析、调试的一般方法与步骤。ZCC1系列晶闸管—电动机直流调速装置为三相全控桥不可逆直流调速装置,是以Z2、Z3系列直流电动机电枢供电为主要用途的、通用的晶闸管—电动机调速装置。该装置的基本性能如下: (1)装置的负荷性质按连续工作制考核。 (2)装置在长期额定负荷下,允许150%额定负荷持续二分钟,200%额定负荷持续10秒钟,其重复周期不少于1小时。 (3)装置在交流进线端的电压为(0.9~1.05)380伏时,保证装置输出端处输出额定电压和额定电流。电网电压下降超过10%范围时输出额定电压同电源电压成正比例下降。 (4)装置在采用转速反馈情况下,调速范围为20∶1,在电动机负载从10%~100%额定电流变化时,转速偏差为最高转速的0.5%(最高转速包括电动机弱磁的转速)。转速反馈元件采用ZYS型永磁直流测速发电机。 (5)装置在采用电动势反馈(电压负反馈、电流正
(6)
(7)
由图3-1可知,控制系统主要由给定积分器(GJ)、速度(转速)调节器(ASR)、电流调节器(ACR)、触发输入及保护单元(CSR)、触发器(CF)、速度变换器(SB)、电流变换器(LB)等组成。速度(转速)调速器的输出作为电流调节器的给定电压,电流调节器的输出作为触发装置的移相控制电压,速度(转速)调节器和电流调节器采用PI调节器。 ZCC1系列晶闸管直流调速装置各单元的电气原理图如图3-2至图3-9所示。 三、直流调速系统简单工作原理 下面结合整个系统对不可逆直流调速系统停车、正向启动、减速各种运行工作过程进行分析。 (1)停车状态电动机停车时,开关S打开,给定电 压U gn =0,速度(转速)调节器单元中A 1 速度比较器输出 一个大于+8V的推β信号电压,使速度(转速)调节器 输出电压为负向限幅值-U gi ,电流调节器输出电压为正 向限幅值U Kmax ,通过触发输入单元CSR、触发器CF,使晶 闸管变流器控制角处于最小逆变角β min ,电动机处于停车状态。 (2)电动机正向启动运行当开关S闭合,给出负的 正向速度给定电压(U gn =-),当速度给定电压U g >0.2时 A 1 速度比较器迅速翻转输出为负电压,使速度(转速) 调节器迅速退出负限幅值-U gi 并开始按速度偏差信号进
输入电容纹波电流有效值 相信很多人都知道Buck Converter 电路中输入电容纹波电流有效值,在连续工作模式下可以用一下两个公式来计算: Icin.rms =Io × ()D D ×?1 或Icin.rms =Io × 2 )(Vin Vo Vo Vin ? 然而,相信也有很多人并不一定知道上面的计算公式是如何推导出来的,下文将完成这一过程。 众所周知,在Buck Converter 电路中Q1的电流(Iq1)波形基本如右图所示(或见第二页Q1电流波形):0~DTs 期间为一半梯形,DTs ~Ts 期间为零。当0~DT 期间Iq1⊿足够小时,则Iq1波形为近似为一个高为Io 、宽为DTs 的矩形,则有: ?? ?=<<<<)() (01DTs t o Io Ts t DTs Iq 而对于Iin ,只要Cin 容量足够大,则在整个周期中是基本恒定的【见输入电流(Iin)波形】,Iin 值由下式得出: Iin =(V o/Vin)*Io =DIo 由KCL 得:Iin+Icin =Iq1,这里定义Icin 流出电容为正向。所以在整个周期中有: 输入电流(Iin)波形: Icin =Iq1-Iin 即: { )0() (DTs t DIo Io T t DTs DIo Icin <
的,所以有Icin =-DIo 根据有效值的定义,不难得出输入电容的纹波电流有效值Icin.rms 的计算公式: ])()([1.022 ∫∫ ?+?=DTs Ts DTs dt DIo dt DIo Io Ts rms Icin )]()()[(1 .22DTs Ts DIo DTs DIo Io Ts rms Icin ?×+×?= 即: 又因为有D D Io rms Icin ×?=)1(.Vin Vo D =,所以得: 2 )(.Vin Vo Vo Vin Io rms Icin ?= Q1电流(Iq1)波形:
电力拖动自控系统课程设 计报告 题目转速电流双闭环直流调速系统设 计 学院:电子与电气工程学院 年级专业:2012级电气工程及其自动化(电力传动方向)姓名: 学号: 指导教师: 成绩:
电力拖动自动控制系统综合课程设计 设计任务书 某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据为: 直流电动机:kW 5.7P N =,V 400U N =,A 8.21I N = ,min /r 3000N =n , W 716.0R a =,电枢回路总电阻Ω=75.1R ,电枢电路总电感mH 60L =,电流允许 过载倍数5.1=λ,折算到电动机轴的飞轮惯量22m N 64.2GD ?=。励磁电流为1.77A 。 晶闸管整流装置放大倍数40K s =,滞后时间常数s 0017.0T s = 电流反馈系数)I 5.1/V 15(A /V 4587.0βN ≈= 电压反馈系数)/V 15(r m in/V 005.0αN n ≈?= 滤波时间常数s 002.0T oi =,s 01.0T on = V 15U U U cm *im *nm ===;调节器输入电阻Ω=K 40R o 。
设计要求:稳态指标:无静差; 动态指标:电流超调量00i 5≤σ;采用转速微分负反馈使转速超调量等于0。 目 录 1 概述 (1) 1.1问题的提出 ............................................................................................................ 1 1.2解决的问题 ............................................................................................................ 1 1.3实现目标要求设计 . (1) 2 主电路计算 (2) 2.1整流变压器的计算 .............................................................................................. 2 2.2晶闸管及其元件保护选择 (2) 3 直流双闭环调速系统设计 (8) 3.1转速和电流双闭环调速系统的组成 .............................................................. 8 3.2系统静态结构图及性能分析 ............................................................................ 9 3.3系统动态结构图及性能分析 .. (10)
大功率四象限变流器微机实时控制原理 株洲电力机车研究所王挺泽 摘要:本文主要介召了大功率四象限变流器微机控制的基本原理及控制方法 关键词:四象限变流器、微机控制、原理、方法 前言 大功率四象限变流器微机实时控制原理是在AC4000原型车四象限变流器控制的基础上进行的。在此基础上,结合微机控制的优点,又进一步作了的完善,增加了功率因数角控制和具有改善直流电压动态调节性能的直流电流反馈环节。在控制的硬件上则采用了TMS320C31和80C196双CPU的方案,其中80C196负责:(1)与电网电压的同步控制、(2)充电接触器和短接充电接触器的控制、(3)与有关计算机的通迅、(4)功率因数角的探测、(5)跳弓的检测。而微处理器DSP320C31则负责:(1)电压、电流的采样、(2)电压、电流调节器的计算、(3)变压器直流磁化控制、(4)功率因数角的控制、(5)调制电压的计算、(6)PWM脉冲计算、(7)PWM脉冲输出控制。 1、四象限变流器主电路工作原理 如图1所示为交直交电力机车一个转向架带有两个网侧四象限变流器的主电路 图1 四象限变流器的主电路原理图
原理图。为了更好地说明四象限变流器的工作原理,下面对网侧只有一个四象限变流器回路进行分析。为了简化起见,变压器用一个等效电路表示,变压器的漏抗和内阻用一个电感和一个电阻表示。原理上四象限变流器的两对桥臂(包括两个GTO和两个二极管)可用转换开关代替。当网侧四象限变流器在中间回路直流电压U d大于u st峰值下运行时,4qs就作升压调压器工作。图2为用转换开关代替的网侧四象限变流器等效电路图。 图2 四象限变流器的等效电路原理图 4qs是一个脉冲整流器,因此按转换开关的位置,四象限变流器有以下几种工作方式: (1)、u st=0 :电能在电网与变压器漏抗之间交换能量,此时u L=u N,i d0=0 (2)、u st=+U d:电能在电网、变压器漏抗与中间回路之间交换能量,此时u L=u N-U d, I d0=I N (3)、u st=-U d:电能在电网、变压器漏抗与中间回路之间交换能量,此时u L=u N+U d, I d0=-I N 用脉宽调制产生各开关元件的PWM信号,在变流器输入端形成了基波频率与网频一样的脉宽调制电压。现假设该调制电压为理想的正弦波,当u N和调制电压u st 图3 牵引工况和制动工况下的四象限变流器基波矢量图
Buck 电路双闭环控制 一 引言 BUCK 电路是一种降压斩波器,降压变换器输出电压平均值Uo 总是小于输出电压U D 。通常电感中的电流是否连续,取决于开关频率、滤波电感L 以及电容C 的数值。 简单的BUCK 电路输出的电压不稳定,会受到负载和外部的干扰,加入补偿网络,可实现闭环控制,通过采样环节得到所需电压/电流信号,再与基准值进行比较,通过闭环控制器得到反馈信号,与三角波进行比较,得到调制后的开关波形,将其作为开关信号,从而实现BUCK 电路闭环控制系统。Buck 电路的闭环控制有电压环控制、电流环控制以及二者结合的双闭环控制,此处采用双闭环控制:电流内环,电压外环。根据相关的电路设计适当的补偿网络对电路进行校正,提高电路系统输出性能。 二 BUCK 变换器主电路参数设计 2.1 设计及内容及要求 1) 输入直流电压(in V ):50V 2) 额定输出电压(o V ):15V 3) 额定输出电流(o I ):1.67A 4) 输出电压纹波峰-峰值:mV V o 016.02≤? 5) 电感电流纹波峰峰值:A I L 42.02≤? 5) 锯齿波幅值(p V ):2.5V 6) 开关频率(s f ):100kHz 7) 输出电压采样网络传函3/1)(=s H
2.2主电路设计 根据以上的对课题的分析设计主电路如下: 图2-1 Buck 电路原理图 1)占空比计算 3.015 50=== o in V V D ,进而有S f D DT t s s on μ3/=== 2)滤波电感设计 由L L u dt di L =可知,)1(1 2D T V L I s o L -= ?,代入数值得mH L 25.0=,考虑到 电感寄生电阻,取Ωm 1。 3)滤波电容设计 由c c i dt du C =可知,L s o I T C V ????=?22112,代入数值得uF C 83.20=,考虑到 电容的等效串联电阻,Ω=01.0ESR R 。 三 Buck 变换器控制器参数设计 3.1 电路双闭环控制结构 整个系统的双闭环控制结构图如图3-1。 图3-1 系统总控制框图 图中Gv 、Gi 网络传函需根据各环传函的特性设计相应的零极点以及增益值,使系统传函达到我们的目标函数。 下面对电路进行分析,从电流内环的设计到电压外环的设计。
关于纹波系数的确定和计算 工频50Hz全波整流 全波整流输出为100Hz脉动直流,此时直流电压平均值为交流电压的0.9倍。也就是说交流100V 全波整流输出电压为90V。此时直流脉动系数为0.67,也就是说在这90V直流中交流电压分量为 60.3V。此时纹波系数为: 0.707X0.67=0.47=47% 【注:纹波的表示方法可以用有效值或峰值来表示;这里用的是有效值】 1:C型滤波: 在全波整流电路后面增加一个电容就构成了C型滤波。此时输出直流电压平均值上升为交流电压的1.2倍。纹波系数大小与滤波电容、纹波频率、负载电阻成反比。 纹波系数r=0。072/(f/C*RL) (C=F)r=1440/(C*RL) (C=uF) (新建)例:RL=2700欧f=50Hz C=40uF r=0。072/50/(0。00004x2700)=0。013% 2:LC型滤波: 整流器与电容之间增加一个电感就构成LC型滤波。这是利用电感对交流有感抗的特性。由于电感 有抑制电流突变特性使滤波电容两端的电压不能充到峰值。因此LC型滤波输出直流电压平均值小于交流电压的1.2倍,大约0.95。相位差接近180度。 电感临界值=RL/942 LC型滤波电路滤波系数=0.4*L*C LC型纹波系数r=0.47 / 滤波系数r=1。175/L*C (C=uF) 假设负载电阻RL=4700欧,4700/942约等于5.11H是临界电感量。 L常规应用时取该值大于或等于2RL/942 例:电流I=170mA,DC=420V,根据U=IR此时电路负载电阻R=U/I=2470欧。 电感临界值=2470/942约等于2.62H。电感取2XL=4.940H或以上 设L=5H,C=40uF,滤波系数为0.4*5*40=80。 LC型滤波电路纹波系数r=0.47/ 滤波系数=0.47/80=0。005875=0。5875% 或直接用r=1。175/LC=1。175/(5X80)=0。005875=0。5875% 3:CLC型滤波: CLC型滤波是在LC型滤波基础上改良的兀型滤波 CLC滤波系数:130*L*C1*C2*RL/1000000 CLC纹波系数r=0.47 / 滤波系数r=3615/(C1*L*C1*RL)(C=uF) C滤波 LC滤波 CLC滤波
双闭环控制的直流调速系统简介 1.1V—M系统简介 晶闸管—电动机调速系统(简称V—M系统),其简单原理图如图1。图中VT是晶闸管的可控整流器,它可以是单相、三相或更多相数,半波、全波、半控、全控等类型。 优点:通过调节触发装置GT的控制电压来移动触发脉冲的相位,即可改变整流电压从而实现平滑调速。 缺点: 1.由于晶闸管的单向导电性,它不允许电流反向,给系统的可逆运行造成困难。 2.元件对过电压、过电流以及过高的du/dt和di/dt都十分敏感,其中任一指标超过允许值都可能在很短时间内损坏元件。 因此必须有可靠的保护装置和符合要求的散热条件,而且在选择元件时还应有足够的余量。 图1 V—M系统 1.2转速控制的要求和调速指标 任何一台需要控制转速的设备,其生产工艺对调速性能都有一定的要求。归纳起来,对于调速系统的转速控制要求有以下三个方面: 1)调速——在一定的最高转速和最低转速范围内,分档地(有级)或平滑地(无级)调节转速; 2)稳速——以一定的精度在所需转速上稳定运行,在各种干扰下不允许有过大的转速波动,以确保产品质量; 3)加、减速——频繁起、制动的设备要求加、减速尽量快,以提高生产率;不宜经受剧烈速度变化的机械则要求起﹑制动尽量平稳。
1.3 直流调速系统的性能指标 根据各类典型生产机械对调速系统提出的要求,一般可以概括为静态和动态调速指标。静态调速指标要求电力传动自动控制系统能在最高转速和最低转速范围内调节转速,并且要求在不同转速下工作时,速度稳定;动态调速指标要求系统启动、制动快而平稳,并且具有良好的抗扰动能力。抗扰动性是指系统稳定在 某一转速上运行时,应尽量不受负载变化以及电源电压波动等因素的影响[1,6]。 一、静态性能指标 1).调速范围 生产机械要求电动机在额定负载运行时,提供的最高转速m ax n 与最低转速m in n 之比,称为调速范围,用符号D 表示 m in m ax n n D = (2—2) 2).静差率 静差率是用来表示负载转矩变化时,转速变化的程度,用系数s 来表示。具体是指电动机稳定工作时,在一条机械特性线上,电动机的负载由理想空载增加到额定值时,对应的转速降落 ed n ?与理想空载转速 n 之比,用百分数表示为 %100%1000 00?-=??= n n n n n s ed ed (2—3) 显然,机械特性硬度越大,机械特性硬度越大,ed n ?越小,静差率就越小,转速 的稳定度就越高。 然而静差率和机械特性硬度又是有区别的。两条相互平行的直线性机械特性的静差率是不同的。对于图2—1中的线1和线2,它们有相同的转速降落1ed n ?=2 ed n ?, 但由于 01 02n n <,因此12s s >。这表明平行机械特性低速时静差率较大,转速的相对 稳定性就越差。在1000r/min 时降落10r/min ,只占1%;在100r/min 时也降落10r/min ,就占10%;如果 n 只有10r/min ,再降落10r/min 时,电动机就停止转动,转速全都 降落完了。 由图2—1可见,对一个调速系统来说,如果能满足最低转速运行的静差率s ,那么,其它转速的静差率也必然都能满足。
运动控制课程设计 专业:自动化 班级: 姓名: 学号: 指导教师: 2015年07月 16 日
转速、电流双闭环直流调速系统设计 1.设计目的 一般来说,我们总希望在最大电流受限制的情况下,尽量发挥直流电动机的过载能力,使电力拖动控制系统以尽可能大的加速度起动,达到稳态转速后,电流应快速下降,保证输出转矩与负载转矩平衡,进入稳定运行状态。为实现在约束条件快速起动,关键是要有一个使电流保持在最大值的恒流过程。根据反馈控制规律,要控制某个量,只要引入这个量的负反馈。因此采用电流负反馈控制过程,起动过程中,电动机转速快速上升,而要保持电流恒定,只需电流负反馈;稳定运行过程中,要求转矩保持平衡,需使转速保持恒定,应以转速负反馈为主。故采用转速、电流双闭环控制系统。 2.设计任务 某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路;基本数据如下: (1)直流电动机:220V、160A、1460r/min、Ce=0.129Vmin/r,允许过载倍数λ=1.5; (2)晶闸管装置放大系数:K s=40; (3)电枢回路总电阻:R=0.5Ω; (4)时间常数:T l=0.03s,T m=0.19s; (5)电流反馈系数:β=0.042V/A; (6)转速反馈系数:α=0.0068Vmin/r; 试按工程设计方法设计双闭环系统的电流调节器和转速调节器,并用Simulink建立系统模型,给出仿真结果。 3.设计要求 根据电力拖动自动控制理论,按工程设计方法设计双闭环调速系统: (1)设计电流调节器的结构和参数,将电流环校正成典型I型系统; (2)分析电流环不同参数下的仿真曲线; (3)在简化电流环的条件下,设计速度调节器的结构和参数,将速度环校正成典型II型系统; (4)分析转速环空载起动、满载起动、抗扰波形图仿真曲线 (5)进行Simulink仿真,验证设计的有效性。 4.设计内容 4.1双闭环直流调速系统的组成