基于北斗船位数据的拖网捕捞追溯方法研究
摘要:水产品安全关系到国计民生,北斗卫星导航渔船监控系统的迅速发展,已经初步满足基于船位的追溯,为水产安全管理增添新的手段。通过北斗监测的船位、航向、航速等信息挖掘,可以追溯渔船、渔场、渔港,掌握水产品的来源与累计量,再结合渔场、渔区等信息,实现水产品的追溯。本研究实现追溯到具体作业渔场位置,累计捕捞时间、捕捞强度等信息;实现渔港的渔船追溯并可以获得渔港水产品的来源地,准确到单个捕捞渔场。
关键词: 北斗卫星导航;水产品追溯;渔场
中图分类号:S975 文献标志码:A
Method of Trawling Tracing based on BeiDou Vessel
Monitoring System data
Abstract:Safety of fishery products matters vital to national well-being and the people's livelihood. With the rapidly development of Beidou satellite navigation vessel monitoring system, the retroactivity based on ship's position has been preliminarily satisfied. It provided new means for aquatic safety management. Through monitoring position, course, speed and other information mined by Beidou satellite, fishing boats, fishing ground and fishing port can be traced. Obtaining the source and cumulative amount of aquatic products and combining fishing grounds, fishing area and other information can realize the traceability of aquatic products. This study can carry out the traceability of the fishing grounds location, cumulative fishing time, fishing intensity and other information, which can achieve the traceability of fishing boats and obtain the source of aquatic products in fishing port accurately to a single fishing grounds.
Key words: Beidou satellite navigation; Aquatic traceability; fishing ground
0 引言
近年水产品安全事件的不断爆发,水产品出口质量要求逐渐提高,水产品安全问题已经成为国内外政府(组织)、社会公众关注的焦点,有效的水产品可追溯对保障消费者权益、企业政府利益,以及渔业可持续发展均具有重要意义[1-4]。基于RFID (radio frequency identification,无线射频识别)、电子代码、物联网技术的水产品追溯已经兴起,它是对水产品各环节的质量保障的直接手段[5-7],但缺乏宏观把握水产品追溯的能力。北斗卫星导
航渔船监控系统可以获取丰富的渔船动态信息,综合利用这些信息数据,能够进行水产品追溯信息的挖掘,以创新的思维开展研究[8]
,为水产安全管理增添新的手段。
北斗卫星导航系统在渔业中的应用研究经过多年的发展[9]
,已经初具规模,据统计到目前为止安装北斗卫星导航系统终端的渔船已经有4万余艘
[10,11]
,因此包含船位在内的海量信
息可以满足追溯的要求。在渔船捕捞方式、捕捞渔区、捕捞鱼种确定,并且在时段一定的情况下,累计捕捞时间与渔获量成正相关关系,Lee 等的研究对此也做了一些验证
[12]
。国外已
经用VMS (Vessel Monitoring System )信息计算累计捕捞量,用于渔业资源评估[13,14]
。把
北斗卫星导航系统用于渔船捕捞拖网捕捞追溯的方法在国内外实属少见,本研究通过分析渔船航速、航向的特征判断渔船的状态,根据累计捕捞时间推断渔获量,追溯渔船到过哪些渔场,获得某渔港水产品的来源于哪些渔场,获得某段时间渔场中的渔船,掌握渔船的来源,及用于评估对水产品需求市场的影响,事先做应急调配,减少市场波动,降低因渔场变化而带来的影响。。
1 材料与方法 1.1 数据来源
北斗渔船船位数据来源于上海普适导航技术有限公司,该公司系北斗民用分理服务商,数据信息主要包括渔船的北斗卡号、经纬度位置、航速、航向、发报时间。船位数据的时间分辨率为3分钟记录一次船位,空间分辨率约为10米。数据管理库选用SQL Server 2008数据,具有分析空间数据的功能,可以确定几何图形实例之间的空间关系,船位保存为geometry 点数据类型。
捕捞类型、船名等信息主要来源于“中央财政国内海洋渔船油价补助公示”资料,经过与北斗数据的匹配,确定了3333条渔船的类型,其中拖网船有2212条,占总量的66%。
1.2 方法
一艘渔船一个航次的捕捞作业,由多个具有空间信息的时间序列点组成,按时间顺序连接后就是一条轨迹,一条渔船的轨迹表现为渔民简单的捕捞行为,一条轨迹可以追溯到渔船。多个渔船的捕捞行为则具有一定规律性,研究多条轨迹可以追溯到渔场、渔港。渔船各点位包括航速、航向等信息,研究这些信息可以追溯渔场渔获,也可以计算出渔场的捕捞强度,本文通过船位数据挖掘追溯拖网渔船捕捞。
为了便于渔场分析,对渔场格网进行了细分,划分为0.5°×0.5°的格网(以下称渔区格网),经度范围121~128°N ,纬度范围27~34°E ,并对每个格网从W 向E ,从N 向S 的顺序进行了编码。
渔船是否处于捕捞的状态通过式1判断,当航速和航向处于某阈值范围之内时,处于捕捞状态。
1212(,) =≤≤≤≤P F v d V v V D d D (1)
其中,V 1和V 2是捕捞状态的航速阈值,D 1和D 2是捕捞状态的航向差阈值范围。 一个渔区格网内可能有多艘渔船,一艘拖网渔船捕捞分为多个网次,一般每个网次持续几个小时,一个网次结束后间隔一段时间,然后是下一网次。每个网次又有离散的多个船位点组成。因此计算某个格网内的累计捕捞时间如式2。
,,,,1001
()-====-∑∑∑p m n
i i j k i j k i j k Z P P (2)
其中,Z i 是某渔区格网的累计时间捕捞强度,P i,j,k 、P i,j,k-1是某渔船相邻的两个船位点的时间,两者的差是时间长度。第一次求和是一个网次内累计捕捞时间,第二次求和是一条拖网渔船一段时间多个网次的累计捕捞时间,第三次求和是某渔区格网内所有拖网渔船的累计捕捞时间。
本文采用反距离加权插值法
[15]
生成变化趋势专题图。渔区格网中心离散点分布较均匀,
在制图分辨率较低时,基于反距离权重会获得最佳结果[16,17]
,计算方法如式3。
111n
i
r i i
o n
r i i
z d Z d ===∑∑ (3) 其中,r 为指定的指数;d i 为控制点i 与点O 间的距离,Z o 为O 点的估计值;n 为在估算中用到的控制点数目;Z i 为控制点i 的Z 值。 2 结果与分析 2.1 拖网渔船状态划分
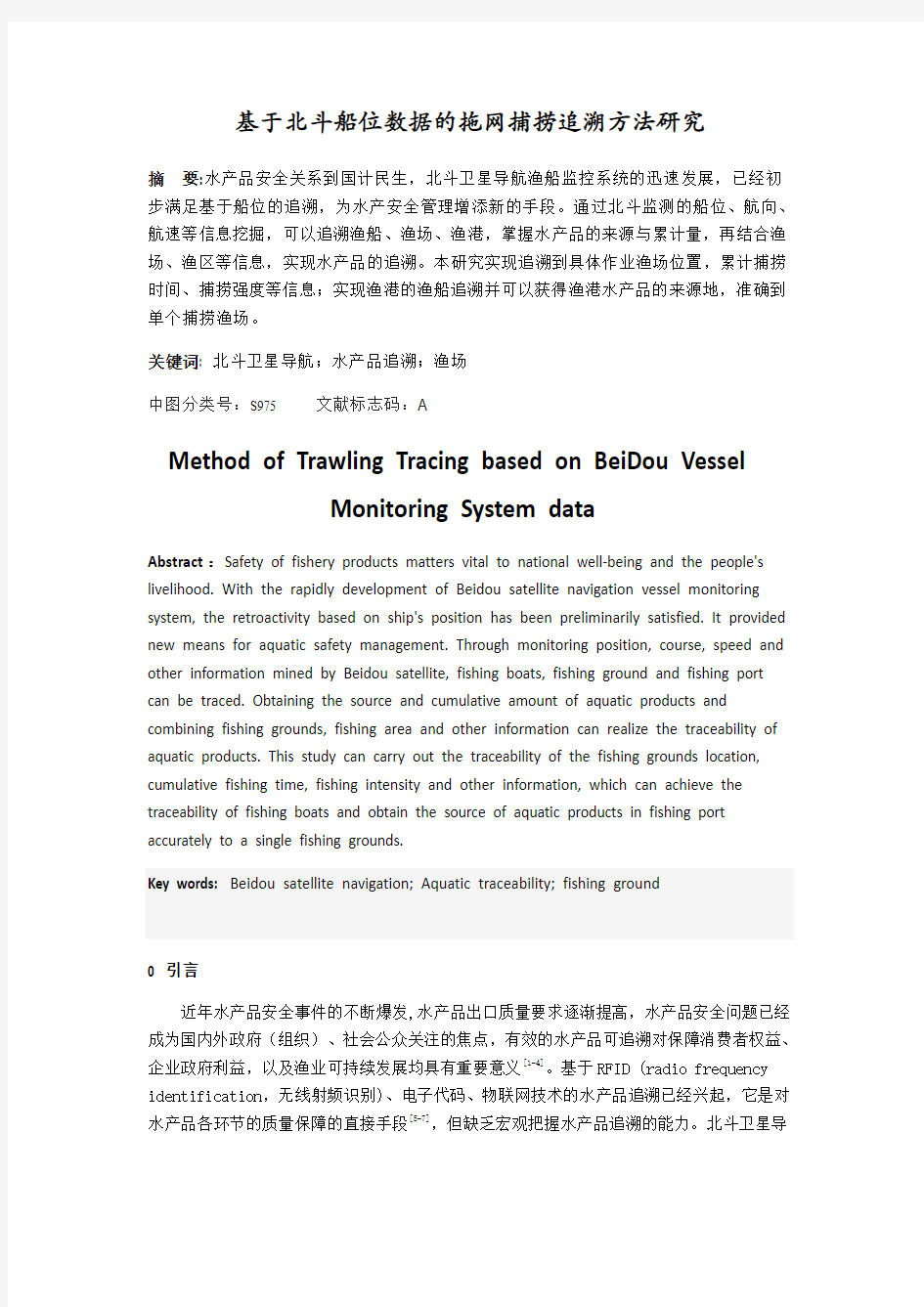
拖网渔船出海捕捞过程一般快速航行到某个渔场,在该渔场开始放网,放网时渔船持续较短时间的快速状态把放完,并开始拖网作业,当网中渔获达到相应的量后,渔船停泊收网,这时速度很慢。本文选择2012年10月10日浙江奉化某一拖网船,北斗卡号为300585(以下称“拖网船300585”)进行分析,在0时到24时根据速度划分了9段(图1),包括抛锚的B 段和I 段,拖网捕捞的C ~H 段、航行的A 段,即三种状态。
图1 2012年10月10日0-24时拖速分布图
表1是对2012年10月10日拖网船300585,在0时到24时船位统计,各分段是渔船所处的状态,平均速度是各段内的渔船均速,累计行程是各段中点连线的曲线长度,相对距离是两个起止节点的距离。长度比是累计行程与相对距离的比值,A段平均速度较大,长度比最小,B段和I段处于抛锚,速度为海流与风的影响而出现的船速,B段2.5个小时移动了150m,I段约3个小时移动了72m。C~H段平均速度在1.3~1.8m/s,长度比在1.3左右,F段由于渔船弯曲航行,因此比值较大。
表1 2012年10月10日浙江奉化某拖网船状态
分段状态平均速度(m/s) 累计行程(km) 相对距离(km) 长度比
A段航行 3.7035.99135.539 1.01
B段抛锚0.240.8300.150 5.53
C段第一网 1.3414.56511.212 1.30
D段第二网 1.6014.12310.468 1.35
E段第三网 1.8218.04513.715 1.32
F段第四网 1.7715.3509.936 1.54
F段第五网 1.5216.4758.3443 1.97
H段第六网 1.5313.4069.852 1.36
拖网渔船的航向(方位角)是指在水平面上以渔船位置为中心,从该点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,航向值在0~360°之间。当渔船航向在0°或360°附近变化时,航向值会出现较大的变化幅度。为了进一步分析航向的实际变化状况,对航向角度进行了差值计算获得航向差,航向差是两个相邻时间,后一时间航向与前一时间航向的差值,正值反应航向顺时针转动,负数反应渔船航向逆时针转动。图1中拖网船300585的航向差值主要在0°左右变化,北斗每3分钟一条数据,拖网船作业时在3分钟内一般不会内不会出现较大的航向变动。
2.2 拖网渔船航速统计
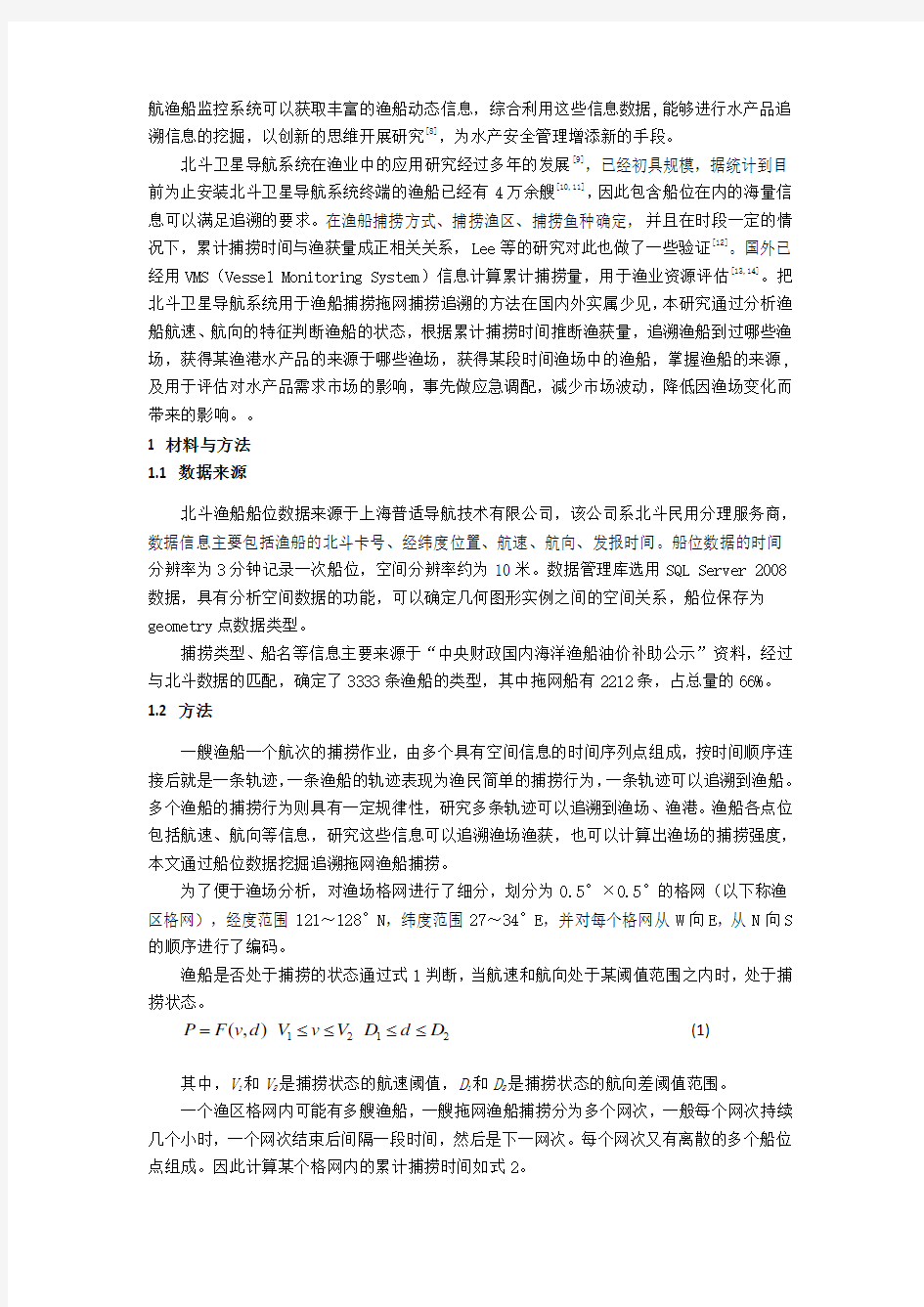
图2是2012年5艘船全年船位点记录数量随速度的变化统计,由于渔船进渔港停泊时也发送船位数据,因此产生了很多值为0 m/s的数据,统计中去掉了这些数据。
图2 2012年点记录数量随速度的变化
渔船状态,通过统计长时间的渔船船位数据特点,找到各种类型的特征,可以判断渔船的捕捞类型。航速主要有三个峰,第一个在0~1m/s,渔船处于进港、抛锚或漂流;第二个在1.3~1.9m/s,渔船处于捕捞状态;第三个在3.3~4.3m/s,渔船处于航行。
通过对多个拖网渔船在2012年的数据统计,各船的全年点记录数量随速度的变化曲线相近,因此文中根据拖网船的航速、航向统计,设定式1中V1为1m/s,V2为2.1m/s,航向差D1设置为-50°,D2设置为50°。
2.3渔船追溯
一艘渔船的多个船位数据可以组成渔船轨迹,借助航速、航向差可以确定各处的渔船状态,计算渔船各状态的累计时间,也能计算出渔船在某个渔场(或渔区)中的累计捕捞时间作为捕捞量,当渔船进港卸鱼时,可以追溯到渔船到过哪些渔场,在各鱼场累计捕捞时间等信息。本文选择2012年9月30日到2012年10月26日浙江象山拖网船300497连续的两个航次分析拖网渔船轨迹(图3(a)右上角小图),根据渔船航速、结合航向差,划分3个状态:慢速(抛锚、漂流、慢速航行),捕捞(拖网捕捞),航行(正常快速航行)。
其第一个航次于2012-9-30 8:38从象山港出发,经过10个格网,2012-10-9 17:51返回,如图3(a);其第二个航次于2012-10-11 10:13从象山港出发,经过18个渔区格网,2012-10-26 2:00返回,如图3(b)。第一个航次共用时255.22小时,第二航次共用时351.78小时。由于慢速状态点间位移小堆积在一起,被其他两个状态覆盖,在小比例尺上不易看到。拖网状态轨迹被航行状态分成许多小段,每一个小段都是一个网次,一个航次会有多个网次。
(a)航次1轨迹图 (b)航次2轨迹图
图3拖网船300497轨迹图
表2中拖网船300497航次1的渔获来自鱼山渔场和舟山渔场,在舟山渔场捕捞效率比较高,捕捞状态占78.29%,在鱼山渔场累计捕捞时间最长;航次2的渔获来自四个渔场,在鱼外渔场和舟山渔场渔船捕捞效率高,舟外渔场累计捕捞时间最长。
表2 拖网船300497状态统计
渔场名称
航次1 航次2
慢速捕捞航行百分比慢速捕捞航行百分比
鱼山渔场14.05 104.25 27.55 71.48% 0.25 0.65 10 5.96%
鱼外渔场 3.45 19.2 1.55 79.34%
舟山渔场10.85 58.95 5.5 78.29% 14.05 85.25 19.95 71.49%
舟外渔场44 112.7 20.15 63.73%
合计24.9 163.2 33.05 73.80% 61.75 217.8 51.65 65.76%
2.4渔港的渔船追溯
一个渔港的近海水产品是由运入该港口的多个近海渔船捕捞供给,在掌握全部渔船船位的数据情况下,可以追溯出某个渔港水产品的来源于哪些渔场(渔区),根据累计捕捞时间推断渔获量。本文以象山1164艘拖网船为例(表3),其处于捕捞状态的点分布在9个渔场,累计捕捞时间最多的是舟外渔场,超过3000个小时,并且该渔场各船平均捕捞时间最长,在2000~3000个小时的渔场有舟山渔场、长江口渔场,在1000~2000个小时的渔场有大沙渔场、鱼山渔场,其他渔场累计捕捞时间都在300个小时以下。
表3 象山拖网渔船捕捞渔船分布
渔场名称船数(条)累计捕捞时间(小时)平均捕捞时间(小时)
鱼山渔场298 1844.95 6.19
舟山渔场286 2483.35 8.68
长江口渔场235 2127.24 9.05
舟外渔场219 3227.24 14.74
190 21.34 0.11 大沙渔场179 1976.70 11.04
温台渔场39 297.30 7.62
江外渔场22 184.83 8.40
沙外渔场7 7.25 1.04
鱼外渔场 6 20.70 3.45
根据渔船航速、结合航向差提取出渔船处于作业状态的点,共提取到象山的1164条拖网船,处于捕捞状态的509687个点。把点分布到0.1°×0.1°的格网中,计算每个格网中的累计捕捞时间,图4中的点是0.1°×0.1°格网中心点,颜色变化代表累计捕捞时间的长短。
图4 象山拖网渔船累计捕捞时间分布
图5中对格点值采用式3进行了插值,生成2012年10月10日插值图,反应拖网捕捞
强度的分布趋势面。舟外渔场、舟山渔场、长江口渔场大沙渔船捕捞强度较大。
图5 象山拖网渔船捕捞渔船分布插值图
2.5渔场渔区的渔船追溯
一个渔场(渔区)捕捞的运往哪些渔港,可以通过分析渔船的来源可以掌握,能够获得
渔场中有多少船,船来自什么地方,累计捕捞时间等信息。本文以2012年10月10日舟外
渔场中的渔区为例追溯渔船来源,舟外渔场位于舟山渔场的东侧,是东海区重要经济鱼虾类
的重要越冬场,是底拖网作业的良好区域,为全国最著名的渔场。舟外渔场经度范围125~128°E,纬度范围29.5~31°N,一个小区格网为0.5°×0.5°,因此舟外渔场由18个小渔区格网组成。
选择了渔区编号92~95、106~109、120~123,12个网格进行分析(表4)。舟外渔场主要是来自象山和奉化的拖网船,鄞州和宁海有少量的拖网船。来自象山港的拖网渔船在107、93、94、108几个渔区的累计捕捞时间都超过了400个小时,来自奉化的拖网渔船在94、95渔区的累计捕捞时间都超过了400个小时,来自鄞州的渔船在94、95、109渔区捕捞过,来自宁海的渔船在94、95渔区捕捞过。
表4 舟外渔场
渔区编号
象山奉化鄞州宁海
船数累计船数累计船数累计船数累计
92 12 26 13 27.6
93 78 694.15 6 62.4
94 64 405.85 150 1008.85 2 3.6 1 0.4
95 13 70.45 62 412.8 2 30.2 1 1.45
106 26 88.25 15 76.05
107 113 844.44 10 109.8
108 66 408.5 48 206.75
109 13 66.9 31 156.6 2 2.95
120 39 160.25 28 145.7
121 55 344.05 32 141.4
122 14 118.4 4 12.05
123 1 0.8
在舟外渔场,根据渔船航速、结合航向提取到象山219条拖网船,处于捕捞状态的67543个点;奉化225条拖网船,处于捕捞状态的47216个点;鄞州2条拖网船,处于捕捞状态的735个点;宁海1条拖网船,处于捕捞状态的37个点。把点分布到0.1°×0.1°的格网中,计算每个格网中的累计捕捞时间,图6中的点是0.1°×0.1°格网中心点。从图中可以看出各位置处渔船的来源及累计捕捞时间的合计值。
图6 2012年10月10日累计时间捕捞强度分布
3. 讨论
本研究通过北斗船位数据分析渔船航速、航向的特征可以判断渔船的状态,掌握渔船的作业规律,根据长时间的渔船航速特点可以获取到各状态的阈值,通过结合航向差提取出渔船处于捕捞状态的船位点,根据点的数量,处于捕捞状态点的持续时间,计算在某个区域累计捕捞时间,制作出累计时间捕捞强度格点图,插值出累计时间捕捞强度趋势图,可以作为北斗系统运用在海洋渔业信息化建设中的一项实例,运用在国内渔船拖网捕捞追溯上面更是首列。
近海水产品涉及环节比较多,如捕捞、交易、储藏、加工、运输和销售环节。已有追溯系统主要关注中下游环节,在上游捕捞环节比较薄弱,多数采用追溯编码方式,通过一维码、二维码、RFID等技术追溯,侧重微观追溯。本文研究侧重宏观追溯,整体把握近海捕捞水产品的来源、去向,及其变动,具有近实时,范围广的特点。在渔场出现污染、台风等影响,以及渔场渔汛变化时,通过渔场内以往渔船捕捞状况、渔获销售方向、累计捕捞时间等数据,进行水产品供应预测,评估可能对水产品需求市场的影响,事先做应急调配,减少市场波动,降低因渔场变化而带来的影响。渔船捕捞追溯方法在保障水产品安全、维护市场稳定等方面,都有重要的意义。在水产品质量出现问题时,通过追溯找到渔船,根据渔船轨迹追溯渔场(渔区),及时找到出现问题的渔场,找到出现问题的渔场后快速查找该时间段内在此渔场捕捞的渔船,根据这些渔船轨迹查找其销售方向,及时对销往区域进行水产品的预警。
虽然本次研究完成了通过北斗船位数据开发利用实现了渔船拖网捕捞追溯的作用,但是不足的是拖网数据累计时间捕捞强度计算不够细化,拖网渔船在功率不同、拖网放置不同水层深度、不同捕捞鱼种情况下航速有差别,因此下一步工作需要通过判别各船的捕捞状况,同时把功率考虑到累计强度中,并分析其它捕捞类型,探索通过航速航向区别各种捕捞类型的方法。
4.结论
基于北斗船位数据的拖网捕捞追溯方法的研究,是通过船位数据挖掘,实现渔船追溯,追溯渔船到过哪些渔场,在各鱼场累计捕捞时间等信息;渔港的渔船追溯,可以获得某个渔港水产品的来源于哪些渔场,根据累计捕捞时间推断渔获量;渔场的渔船追溯可以获得某段时间渔场中的渔船,掌握渔船的来源,以及其累计捕捞时间,为保障水产品安全、维护市场稳定等方面,具有重要的指导意义。
致谢:上海普适导航技术有限公司北斗民用分理服务商提供船位资料,东海水产研究所严利平研究员、刘勇副研究员等为本文撰写提出了积极建议。
参考文献
[1] 张珂,张文志. 水产品可追溯系统研究与应用[J]. 中国渔业经济. 2009(05): 107-112.
[2] 林洪,杜淑媛. 我国水产品出口存在的主要质量安全问题与对策[J]. 食品科学技术学报. 2013(02): 7-10.
[3] 陈玉光. “绿色壁垒”对我国农产品出口贸易的影响及应对[J]. 青岛科技大学学报(社会科学版). 2011(01): 44-47.
[4] 于笛,刘俊荣,章超桦. 水产养殖业可追溯性管理与渔业可持续发展[J]. 水产科学. 2012(10): 624-629.
[5] 颜波,石平,黄广文. 基于RFID和EPC物联网的水产品供应链可追溯平台开发[J]. 农业工程学报. 2013(15): 172-183.
[6] 马莉,赵丽,刘学馨,等. 基于Web服务的水产品批发市场质量追溯系统设计[J]. 农业网络信息. 2013(01): 8-11.
[7] 孙传恒,杨信廷,李文勇,等. 基于监管的分布式水产品追溯系统设计与实现[J]. 农业工程学报. 2012(08): 146-153.
[8] 杨子江,曾省存,宋怿,等. 水产品质量安全可追溯信息的综合利用研究[J]. 中国渔业质量与标准. 2012(01): 34-40. [9] 郭飚,薛元宏. 北斗系统在海洋渔业信息化建设中的关键技术与实现途径[J]. 现代渔业信息. 2004, 19(5): 13-14.
[9] 郭飚,薛元宏. 北斗系统在海洋渔业信息化建设中的关键技术与实现途径[J]. 现代渔业信息. 2004, 19(5): 13-14.
[10] 胡刚,马昕,范秋燕. 北斗卫星导航系统在海洋渔业上的应用[J]. 渔业现代化. 2010, 37(1): 60-62.
[11] 居礼. 北斗卫星导航系统在海洋渔业的应用[J]. 卫星与网络. 2013(3): 16-22.
[12] Lee J, South A B, Jennings S. Developing reliable, repeatable, and accessible methods to provide high-resolution estimates of fishing-effort distributions from vessel monitoring system (VMS) data [J]. ICES Journal of Marine Science: Journal du Conseil. 2010, 67 (6): 1260-1271.
[13] Mullowney D R, Dawe E G. Development of performance indices for the Newfoundland and Labrador snow crab (Chionoecetes opilio) fishery using data from a vessel monitoring system[J]. Fisheries Research. 2009, 100(3): 248-254.
[14] Stelzenmüller V, Maynou F, Bernard G, et al. Spatial assessment of fishing effort around European marine reserves: Implications for successful fisheries management[J]. Marine Pollution Bulletin. 2008, 56(12): 2018-2026.
[15]张胜茂,樊伟. 海洋次表层FIDW温盐影像插值算法[J]. 计算机工程与应用.2012, 48 (26) 205-209.
[16]Watson D F, Philip G M. A Refinement of Inverse Distance Weighted Interpolation[J]. Geoprocessing. 1985, 2: 315-327.
[17]Philip G M, Watson D F. A Precise Method for Determining Contoured Surfaces[J]. Australian Petroleum Exploration Association Journal. 1982, 22(1): 205-212.
CSNC2010 第一届中国卫星导航学术年会 北京
基于北斗卫星系统的远程数据传输与控制技术研究
朱永辉 白征东 过静珺
(清华大学地球空间信息研究所,北京,100084) 摘 要:本文介绍了北斗卫星系统通信的流程与特点,分析比较了远程数据传输与控制模式,在此基础上结合北斗卫星
通信的特点,重点阐述了基于北斗卫星系统的远程数据传输与控制模式以及系统应用层协议开发原则,最后结合项目背 景给出了技术应用情况及结论。 关键词:北斗卫星;数据传输;应用层协议
1 前言
北斗卫星系统可以为覆盖范围内的授权用户提供全天候、全天时的导航定位、通信和授时服务,应 用领域十分广泛。目前,北斗卫星系统应用的一个很重要方面就是利用其通信功能建立远程数据传输与 控制系统,如水文预报、气象预报、地质灾害监测、海洋渔业监控等应用系统。
2 北斗卫星通信
2.1 工作流程
如图 1 所示,北斗卫星系统通信的工作流程为:短报文发送方首先将包含接收方 ID 号和通信内容的 通信申请信号加密后通过卫星转发至地面中心站(入站信号);地面中心站处理接收到的入站信号,并将 其发送到地面网管中心;地面网管中心接收到通信申请信号后,经解密和再加密后发送至地面中心站; 地面中心站将其加入持续广播的出站电文中,经卫星广播给用户;用户机接收出站信号,解调解密出站 电文,完成一次通信。
图 1 北斗卫星系统通信示意图
2.2 北斗卫星通信技术优势与限制
北斗卫星通信除了覆盖范围大、没有通信盲区、安全、可靠等优点外,北斗卫星系统采用一级指挥 的通信方式,用户终端可以根据功能不同分配不同的角色,分为指挥型接收机和通信型接收机,这是北
1 — 1 —
基于北斗卫星导航系统的海上救生示位标 芦庆丰、张三喜、孟宪宏 连云港海事局、北京尚乘亿邦通信技术有限公司 【摘要】本文从海上救生的迫切性、重要性出发,结合海上救生的难点,以及现有海上救生设备的现状,研制出了一种基于我国自主开发的北斗卫星导航系统研发的海上救生示位标,实现了在整个亚太区域海洋上的遇险自动报警、北斗卫星精确定位、落水人员漂移轨迹实时跟踪等功能,解决了一直困扰着我国海上搜救“听不见落水人员报警”和“找不到落水人员位置”的难题,搜救指挥中心只需组织少量船舶或单架飞机对落水人员进行直线式搜救,改变传统的“船海搜救战术”的大海捞针、拉网式搜救模式,减少不必要的搜救力量组织和搜救资源参与,大大节约搜救直接成本支出。也是我国海上搜救史上的一次革命性的突破。 【关键词】北斗海上搜救示位标 一、概述 人类步入海洋世纪后,随着世界经济一体化和信息全球化进程的加快,国际航运事业得到飞速的发展,海洋经济已经成为国民经济的重要组成部分,我国沿海省市都把海洋经济作为新的战略重点。然而,伴生而来的是海上和水上险情和事故多发,海难事故发生概率也在不断增加。据统计,全世界每年约有10 万人在海难事故中丧生。2011年,中国海上搜救中心共接报、处置水上险情2177起,组织、协调船艇8600艘次、飞机402架次参加海上搜救行动,成功搜救海上遇险船舶1721艘、人员18712人,搜救成功率达96.7%。[1] 海上救生的成功与否不仅直接关系到无数个普通家庭的幸福,而且关系到军队的战斗力,甚至会影响我国的国际形象和国家海上安全环境。 二、海上救生的难点 海难大多为突发事故,难于应对,船舶海上航行遇到大风浪、大雾等恶劣气象和海况,有可能突发翻船、碰撞、触礁、搁浅;也可因爆炸、火灾等原因导致船舶沉没。在遭遇海难时,如何及早地搜寻遇险人员,将损失降低到最小就成为首要完成的任务。 由于海上事故的突发性,因此海上救生就存在其独有的难点。首先,人员落水后受风向、海流、海潮等因素影响,位置随海浪不断移动呈动态分布,且漂流方向无任何规律可循。如事故发生在夜间,搜寻工作就更加困难;即使知道有人落水,等救助船舶到达后,落水人员已漂离初始落水地点几海里、几十海里,甚至上百海里。而且落水人员在海上往往只露出头部,最多只露出身体三分之一,即使气象条件较好的白天,靠肉眼观察也只能搜寻600~700m,夜间能见度更差,搜寻更为困难[2]。 其次,受气象、海况等影响,普通搜救船只难于出动,即便出动也无法迅速准确地找到落水人员位置。由于船舶海难事故大多在恶劣气象时突发。这时气象条件差,风急浪高,海况十分恶劣,一般船舶无法出海实施搜救。只有抗风浪性能强的几万吨、几十万吨大型船只可以出动,但这些船舶海上机动性能差,在无法知道落水人员准确位置坐标情况下,搜救落水人员效率更低。国外仅有少数发达国家的海军和海上搜救中心装备全天候搜救飞机,可在恶劣海况条件下实施搜救。 最后,海上受多种因素影响,落水人员生存能力有限。低温海水中浸泡易造成冻僵。如水温0 ℃时,人仅能存活15分钟;水温5 ℃时,能存活1小时左右。同时,在海洋中极易受有害生物伤害,如鲨鱼、海蛇、水母、章鱼、有毒鱼类等,造成落水人员伤亡。[2] 三、现有救生示位设备
北斗用户机用户接口协议 (内部资料,注意保存) 接口数据传输约定 串口非同步传送,参数定义如下: 传输速率:19200bit/s(默认),可根据用户机具体情况设置其它速率; 1 bit开始位; 8 bit数据位; 1 bit停止位; 无校验。 接口数据传输基本格式如下: “指令”或“内容”传输时以ASCII码表示,每个ASCII码为一个字节; “长度”表示从“指令或内容”起始符“$”开始到“校验和”(含校验和)为止的数据总字节数; “用户地址”为与外设相连的用户机ID号,长度为3字节,其中有效位为低21bit,高3bit填“0”; “校验和”是指从“指令或内容”起始符“$”起到“校验和”前一字节,按字节异或的结果;
“信息内容”用二进制原码表示,各参数项按格式要求的长度填充,不满长度要求时,高位补“0”。信息按整字节传输,多字节信息先传高位字节,后传低位字节; 对于有符号参数,第1位符号位统一规定为“0”表示“+”,“1”表示“-”,其后位数为参数值,用原码表示。 接口数据传输协议 外设至用户机信息传输格式
外设至用户机信息传输格式说明 定位申请($DWSQ) 定位信息类别: “普通”表示用户所在位置的大地高程数据<16300米或天线高<400米,“高空”表示用户所在位置的大地高程数据≥16300米或天线高≥400米; 当“测高方式”为“00”时,“高程数据和天线高”参数单位1米。对于普通用户,该参数高16bit(第1位为符号位)为天线所在点的大地高程数据,低16bit为天线高(填全“0”);对于高空用户,该参数为为天线所在点的大地高程数据,是无符号数; 当“测高方式”为“01”时,对于普通用户,“高程数据和天线高”参数高16bit 填全“0”,低16bit填天线距离地面的高度,单位为0.1米;对于高空用户,该参数填天线距离地面的高度,单位为0.5米; 当“测高方式”为“10”时,对于普通用户,“高程数据和天线高”参数高16bit 填全“0”,低16bit填天线距离地面的高度,单位为0.1米;对于高空用户,该参数填天线距离地面的高度,单位为0.5米;
第29卷第4期2009年7月 海 洋 测 绘 HYDROGRA P H I C SURVEY I N G AND CHART I NG V o l 29,N o 4 Ju.l ,2009 收稿日期:2009 03 11;修回日期:2009 03 31 作者简介:邓玉芬(1970 ),女,辽宁葫芦岛人,工程师,硕士研究生,主要从事测绘仪器设备研究。 基于北斗卫星的海洋测量数据传输系统 邓玉芬,张 博,沈 明,宋海英,孙 磊 (海军海洋测绘研究所,天津 300061) 摘要:针对目前我国海洋测量船上测量数据无法实时传输的现状,采用我国自主研发的北斗卫星导航系统为无线信道单元,结合数据压缩及长报文通信协议等技术,设计了基于北斗卫星的海洋测量数据传输系统,解决了海洋测量船上测量数据实时传输的问题。 关键词:北斗卫星;海洋测量船;数据传输;数据压缩;通信协议 中图分类号:P 204 文献标识码:B 文章编号:1671 3044(2009)04 0067 03 1 引 言 目前海洋测量船的基本功能是调查采样、数据采集、以及样品和数据的初加工与存储,待测量船返航到岸站处理中心后再将数据加工成信息产品并发 布,不能实时与岸站和其他船只进行实时数据传输,存在产品发布周期长、数据更新慢等不足,无法满足信息化条件下的需求。 本文针对海洋测量数据传输系统的现状,利用北斗一号系统空间信息技术和通信技术,设计开发了基于北斗卫星的海洋测量数据实时传输系统,弥补了海洋测量船与岸站或其他船只传输手段的不足。充分利用现有资源,提高海洋测量数据传输的实时性、数据处理的准确性、决策参考的科学性,为优质、高效的应急保障、海洋灾害预警提供有力的支持。 2 系统总体设计及功能 系统的整体结构分为船载单元、岸站指挥单元、无线通信单元。 (1)无线通信单元 无线通讯单元采用我国自主研发的北斗卫星导航系统,采用该系统具有的优势是: 使用安全:北斗系统是我国自主知识产权的卫星导航系统,能保证通信的安全性和保密性。 数据通信实时性强:数据传输快捷,一次发送时间大约为1s ,接收终端在几秒钟之内就可以接收到发送端传输的数据,实时性比较强。 !设备及通信费用低、系统容量大并发能力强,可以同时处理30万用户的申请;数据传输快捷,发送一 包数据用时约为1s ;功能强大,具有定位和授时功能。?发展前景广阔:随着北斗二代的建设,北斗系统发展成为具有全球导航能力的卫星定位系统,定位体制也将变为垂直定位,而且通信终端的性能也将逐步提高。 基于北斗系统的通信优势,再结合设计的平台软件、数据无损压缩技术及长报文通信协议等技术手段,能确保海洋调查测量数据实时、安全、有效地传输。 (2)船载单元 船载单元上安装的局域网系统可将所有的调查数据传输到数据中心,平台软件对测量设备采集得到的数据进行分析,提取较为关键的信息,例如水深、温度、盐度、船位等信息,存至本地服务器,同时将分析得到的信息进行打包、压缩、校验,通过北斗用户机定期发送至岸站指挥单元的北斗用户机。 (3)岸站单元 岸站指挥单元配备北斗通讯模块、数据分析处理模块、数据存储模块、数据显示模块、网络模块等。数据分析处理模块负责对接收到实时性海洋调查测量数据进行解码、报文识别、报文格式检查、报文订正处理、要素译码和质量控制等数据预处理工作。数据存储模块按照不同的数据种类分类,进行数据组织和管理,把数据存储到中心数据库。数据显示模块和网络模块对数据库中的数据进行历史数据查询和实时数据显示,生成指导性数值产品,并将数据发布到所需单位。3 系统关键技术的解决3 1 数据长度限制问题 北斗系统每次数据通信的长度为98个字节,如
基于北斗卫星导航定位系统的气象水文信息系统 【摘要】气象水文信息与工农业生产、百姓生活、军事活动、科学试验息息相关,构建一个科学合理、运行高效的气象水文信息系统,提高气象水文信息传输的实时性、信息处理的准确性、决策参考的科学性,从而使气象水文信息保障优质、高效。本文构建一个基于北斗卫星导航定位系统的气象水文信息系统,主要介绍系统组成、主要功能和应用情况。 【关键词】北斗卫星导航系统;气象水文信息系统;信息采集 气象水文信息与工农业生产、百姓生活、军事活动、科学试验息息相关,构建一个科学合理、运行高效的气象水文信息系统,提高气象水文信息传输的实时性、信息处理的准确性、决策参考的科学性,为优质、高效的气象水文信息保障提供有力的支持。北斗卫星导航定位系统是我国自主研发的卫星导航定位系统,集定位、短报文通信和授时三大功能于一体,基于北斗卫星导航定位系统的气象水文信息系统能较好地担当气象水文信息保障职责。 一、系统组成 气象水文信息系统主要由气象水文信息自动采集系统、信息传输系统、信息综合应用系统组成。 1.气象水文信息自动采集系统 气象水文信息自动采集系统由气象水文监测室及其所辖自动气象水文监测站、卫星遥测站、移动式气象水文数据采集终端、固定式气象水文数据采集终端和测量船等自动气象要素终端采集设备组成。 2.信息传输系统 数据传输系统由北斗卫星及定位总站组成。北斗卫星接收到采集终端发来的数据后,将其发送给定位总站。总站进行分拣后将数据通过北斗卫星发送到相应气象水文监测室的指挥型用户机;同时将所有数据通过地面链路发送到指控中心。定位总站通过逆向流程将指控中心发出的远程终端配置指令通过卫星发送到相应普通型用户机,由普通型用户机发送数据采集终端,进行系统识别码、采集频率等参数的修改。 3.信息综合应用系统 信息综合应用系统由信息分析处理机、信息显示设备、信息存储设备、信息应用工作站、网络互联设备、网络安全设备、信息交换处理机等组成。 二、系统功能
北斗用户机用户接口协议 (4.0版本外用) 1.接口数据传输约定 串口非同步传送,参数定义如下: 传输速率:19200bit/s(默认),可根据用户机具体情况设置其它速率; 1 bit开始位; 8 bit数据位; 1 bit停止位; 无校验。 接口数据传输基本格式如下: “指令”或“内容”传输时以ASCII码表示,每个ASCII码为一个字节; “长度”表示从“指令或内容”起始符“$”开始到“校验和”(含校验和)为止的数据总字节数; “用户地址”为与外设相连的用户机ID号,长度为3字节,其中有效位为低21bit,高3bit填“0”; “校验和”是指从“指令或内容”起始符“$”起到“校验和”前一字节,按字节异或的结果; “信息内容”用二进制原码表示,各参数项按格式要求的长度填充,不满长度要求时,高位补“0”。信息按整字节传输,多字节信息先传高位字节,后传低位字节; 对于有符号参数,第1位符号位统一规定为“0”表示“+”,“1”表示“-”,其后位数为参数值,用原码表示。
2.接口数据传输协议 4.1 外设至用户机信息传输格式 4.2 外设至用户机信息传输格式说明 4.2.1 定位申请($DWSQ) 定位信息类别: “普通”表示用户所在位置的大地高程数据<16300米或天线高<400米,“高空”表示用户所在位置的大地高程数据≥16300米或天线高≥400米; 当“测高方式”为“00”时,“高程数据和天线高”参数单位1米。对于普通用户,该参数高16bit(第1位为符号位)为天线所在点的大地高程数据,低16bit为天线高(填全“0”);对于高空用户,该参数为为天线所在点的大地高程数据,是
Computer Science and Application 计算机科学与应用, 2019, 9(4), 703-709 Published Online April 2019 in Hans. https://www.doczj.com/doc/c04486237.html,/journal/csa https://https://www.doczj.com/doc/c04486237.html,/10.12677/csa.2019.94080 Air Quality Detection Drone System Based on Beidou Navigation System Yingting Li1, Ye Huang2, Shanxiong Chen1 1Southwest University, Chongqing 2High School Affiliated to Southwest University, Chongqing Received: Mar. 25th, 2019; accepted: Apr. 4th, 2019; published: Apr. 11th, 2019 Abstract Aiming at the problems of poor real-time performance, low precision and space limitation of tra-ditional air quality monitoring methods, this paper designs a real-time monitoring system for air quality based on the Beidou navigation system independently developed by China. It mainly in-cludes Beidou navigation system, drone system, ground control center and mobile phone terminal. The UAV system includes a BDS module, an information acquisition module, a control unit module, and a communication transmission module. The core control unit module uses the single-chip computer to process the PM2.5, PM10, temperature and humidity, and other data collected by the gas sensor and the geographical location information data collected by the BDS module, and communicates with the ground control center through the GSM network in real time, and the PC of the ground control center imports the real-time map, to visualize the data transmitted by the drone. The analysis shows that the system has outstanding advantages and can realize the func-tion of real-time monitoring of air quality, which makes up for the shortcomings of current air quality monitoring methods, can provide a reliable basis for air environment treatment, and has broad application prospects. Keywords Beidou Navigation, Monitoring Air, Unmanned Aerial Vehicle 基于北斗导航系统的空气质量检测无人机系统 李盈婷1,黄也2,陈善雄1 1西南大学,重庆 2西南大学附属中学,重庆
表 GPS/BD 模块数据编码格式 二进制通信为异步串行通信,3.3V TTL 电平,1200波特率,1位起始位,8位数据位,1位停止位,偶校验。数据包更新率为1Hz 。 定位信息(TXD )输出760ms 后发出脉宽为2ms 的负脉冲触发信号(GPIO ) TXD 和GPIO 分别由两个PIN 输出,包括电源共使用4个PIN 。 字节位置 定义 单位 类型 说明 1-2 码组标识符 Uchar 帧头EB3A 3 UTC 时间: 小时 hour Uchar Hour 4 UTC 时间: 分钟 minute Uchar 秒数据为0~599(扩大10倍),占10位,需要与分钟的字节合并,分钟为0~59,占6位,将秒的2位移至分钟的第7~8位上(高比特位的2位)。 5 UTC 时间: 秒 second Uchar 6 定位状态 N/A Uchar 0/1(0表示不定位,1表示定位) 7-10 经度 radians float -π to π(正数表示东经,负数表示西经)4个字节,低字节在前,高字节在后,float 数据类型,是弧度值。 11-14 纬度 radians float -π/2 to π/2(正数表示北纬,负数表示南纬)4个字节,低字节在前,高字节在后,float 数据类型,是弧度值。 15-18 海拔高度 m int 0~600000(比例因子是10)4个字节, 低字节在前,高字节在后, 19-20 北向速度 m/s short 比例因子为100,精度为0.01m/s ,范围是-327.68m/s 到327.67m/s 。2个字节,低位字节在前,高位字节在后 21-22 东向速度 m/s short 23-24 垂向速度 m/s short 25 卫星数 N/A Uchar 接收到卫星数(GPS+BD 最多24) 26 PDOP 精度0.1 N/A Uchar 定位精度因子(饱和值为25.5,即如果大于25.5时,输出值为25.5。其比 例因子是10) 27 卫星状态信息包编号 N/A Uchar 状态信息包编号和参与解算卫星数 (暂定分8组) 28-31 第1颗卫星 状态 N/A Uchar 一组3个卫星,每组4字节(包括卫星号、是否参与计算、载噪比、仰角和方位)。方位和仰角信息合并占用2个字节,仰角最大为90,占低比特位的用7bit ,方位角最大为360,占用9bit ,需要将方位角的1个bit 移至仰角所占字节的高比特位(第8位)中 N/A Uchar N/A Uchar N/A Uchar
北斗参数指标 用户端产品 一.北斗手持型用户机——个人〔单兵〕掌控的北斗用户产品 ●功能介绍 ◇全天候的定位、授时和双向报文通信功能,支持基于文本/航迹 图/指南针等多种方式的移动导航; ◇提供移动条件下的优化信号捕获和处理策略,充分利用建筑物遮 挡间隙进行导航和定位信息处理; ◇预留标准RS232串行数据接口,支持多种数据协议,兼通多种 独立外设,如各类外设PDA、掌上电脑、商务通、手提电脑、加 固电脑设备等; ◇超大容量的信息处理和存储能力,可存储和管理定位信息100 条、通信电文100条可全部锁定航线10条、路标数据100个、 地址薄信息100条、常规短语30条; ◇支持全屏手写识别功能;自主研制的数字按键输入法,输入信息 更快捷、更方便,使用环境更广泛; ◇配备基于标准串口的职能数据维护和程序升级软件,确保维护设 备和备份数据更轻松、更安全; ◇配备独创的基于地图的智能导航信息管理软件,实现可视化的导 航信息编辑、维护和同步下载; ◇特殊功能:用户机频偏可调,用户机零值可调; ●技术指标
主要功能介绍 定位功能 接收到定位信息时,根据用户设定给出声音或符号提示,实时显示定位信息。用户机对接收到的CRC校验出错的定位信息不处理,同时给出CRC错误提示。接收到定位信息为多值解时,具有多值解提示功能。具有紧急定位功能。每次定位信息用一屏显示,内容为:L(经度,度分秒)、B(纬度,度分秒)、H(正常高,米)、T(时间,h:m:s:ms),并具有大地高与正常高的显示转换功能。按先进先出的原则动态存储100个最新定位点信息。 导航功能
能方便地按大地坐标,高斯平面直角坐标或麦卡托平面直角坐标输入,查询和编辑航线,航路 点信息。用户可选择自动和手动两种定位方式获得当前位置信息,自动定位频度为用户机的最高服务频度。在自动定位工作方式下,可正常进行通信服务。坐标采用符合国家军用标准,可根据需要进行坐标转换。 通信功能 能进行电文键入,编辑,发送,接收和显示。用户机一次发射通信电文长度≤120个汉字(或420个代码)接收到通信信息〔含CRC校验出错的通信信息〕时,根据用户设定能给出声音或符号提示,实时显示通信时间,发信地址和通信电文,CRC出错时给出错误提示。接收通信信息后自动发送通信回执。通信电文输入和显示有汉字和代码(BCD)两种方式,汉字输入为全拼方式,机内汉字库为国标GB2321-80一级汉字(3755个);汉字编码为区位码。按先进先出的原则动态存储通信信息,通信信息含通信时间,发信地址和通信电文,接收的通信信息可人为锁定存储、解锁和删除。固定存储能力为30条电文,锁定存储能力为9条电文。具有接收通信信息调阅功能,调阅方式可按通信时间、发信地址两种方式进行。用户可向中心控制系统查询其他用户发给本用户的通信电文和通信回执。具有20条待发送的通信电文的存储能力。 初始化参数,状态设定和整机监测功能 开机自检和整机工作状况巡检,在显示器上给出整机工作状况指示。设有初始化参数(已知高程数据、天线高、坐标及坐标系选择等)默认值和输入提示,可方便更改。实时给出故障告警和功能状态提示(信号失锁、信号被抑制、需换电池、设备故障类型等)。 安全保护功能 过流、过压、欠压或偶然极性反接时自动保护设备。设备断开电源后,具有内部数据掉电保护功能。 信源保密功能 用户机通过保密卡由中心控制系统保密系统配合实现信源保密功能,保密级别为机密级。数据接口功能(RS-232接口) 通过数据接口接收外设输入的定位和通信申请等有关信息。通过数据接口向外设输出接收和发射的有关数据信息。通信协议详见《“北斗一号”用户机数据接口要求(2.1版)》。 * 注:必须使用本产品所配专用串口线。 差分功能 用户机具备北斗与GPS差分定位功能,定位精度小于等于5米。 主要技术参数 定位精度:20米1σ(无标校机区域100米1σ) 信号功率: 动态范围: 接收通道数:首次捕获时间:C≥-157.6dBW(天线口面I支路信号功率) ≤300公里/小时 信息通道1个,时差通道1个 ≤2s
北斗一号数据采集终端安装手册 1.设备简介 目前用于数据采集业务的北斗设备主要有:XDCZ-YX-III/G型用户机(简称海岛机)和北斗一号一体式通用型用户机两种,如下图。这两种设备都具有北斗定位、通信功能,可实现独立组网,也可与多种传感器相连,从而实现水文,气象,地质,森林防火等各类大型管线行业的数据传输和实时监控。适用于常规通信无法实现的场所及长期无人值守的基站工作。 设备的组成: ?天线 ?馈线(线缆) 图1-1 XDCZ-YX-III/G型用户机
图1-2 XDCZ-YX-III/G型用户机 图1-3 北斗一号一体式通用型用户机
2.设备安装 1)安装地点的选择:天线可以安装在地面或建筑物顶部的开阔地,可视用户所在 场地具体情况而定,但是应保证卫星信号传递链路上没有遮挡与电磁干扰。 2)确定有无遮挡的原则:以拟定的安装点的正南方为0度,在偏西50度,偏东 50度内的扇区内应无高大建筑(即图一中阴影区),详见图一;确定扇区内建 筑不超高的标准是:建筑物最高点与天线安装点间的连线,与地平线的夹角应 小于15度,详见图二。 3)天线安装点应尽量远离高压线路、变电所、广播电台、微波基站等干扰源,最 小距离应保持在1公里以上,以减少电磁干扰对卫星信号的影响;两侧、后方 5米内无面状金属物或金属栅栏等其他可能造成电磁反射干扰的物体。 4)避雷:在多雷电地区,要装避雷针。避雷针应高于天线,确保天线位于避雷针 的有效保护之下(避雷针顶点与天线顶点的连线同避雷针垂直方向的夹角要小 于45°,见图三,避雷针务必连接大地,接地电阻越小越好。
5)天线安装位置周围要有足够的活动空间。2x2米范围内无墙壁、树木、机器等 障碍物,以便于天线及卫星室外设备的安装。 6)天线安装位置应高于地面或支架于空中,以免天线附近形成积水。 7)应安装在人和动物难以接触到的地方,或有一定的保护措施,以防人为或意外 损坏。 图四 图五
北斗卫星导航系统及应用综述 0引言 北斗卫星导航系统是中国自行研制的全球卫星定位与通信系统(BDS),是继美全球定位系统(GPS)和俄GLONASS之后第三个成熟的卫星导航系统。系统由空间端、地面端和用户端组成,可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并具短报文通信能力,已经初步具备区域导航、定位和授时能力,定位精度优于20m,授时精度优于100ns。2012年12月27日,北斗系统空间信号接口控制文件正式版正式公布,北斗导航业务正式对亚太地区提供无源定位、导航、授时服务。 1 北斗卫星导航系统基本信息介绍 中国在2003年完成了具有区域导航功能的北斗卫星导航试验系统,之后开始构建服务全球的北斗卫星导航系统,于2012年起向亚太大部分地区正式提供服务,并计划至2020年完成全球系统的构建。北斗卫星导航系统和美国全球定位系统、俄罗斯格洛纳斯系统及欧盟伽利略定位系统一起,是联合国卫星导航委员会已认定的供应商。 1.1 北斗卫星导航系统的定位原理 “北斗一号”卫星导航系统的定位原理与GPS系统不同,GPS采用的是被动式伪码单向测距三维导航,由用户设备独立解算自己的三维定位数据,而“北斗一号”卫星导航定位系统则采用主动式双向测距二维导航, 由地面中心控制系统解算供用户使用的三维定位数据。“北斗”卫星是中国“北斗”导航系统空间段组成部分,由两种基本形式的卫星组成,分别适应于GEO和MEO轨道。“北斗”导航卫星由卫星平台和有效载荷两部分组成。卫星平台由测控、数据管理、姿态与轨道控制、推进、热控、结构和供电等分系统组成。有效载荷包括导航分系统、天线分系统。GEO卫星还含有RDSS有效载荷。因此,“北斗”卫星为提供导航、通信、授时一体化业务创造了条件。“北斗”导航卫星分别在1559MH z~1610MH z、1200MH z~1300MH z两个频段各设计有两个粗码、两个精密测距码导航信号, 具有公开服务和授权服务两种服务模式[1]。 “北斗二号”导航卫星系统体制第二代导航卫星系统与第一代导航卫星系统在体制上的差别主要是: 第二代用户机可免发上行信号,不再依靠中心站电子高程图处理或由用户提供高程信息,而是通过直接接收卫星单程测距信号来自己定位, 系统的用户容量不受限制,并可提高用户位置隐蔽性。
利用rtklib开源代码处理GPS以及北斗数据详解 在GNSS领域最基础的工作是这些GNSS系统的定位工作,对于绝大多数研究 者,自己着手完成这些工作是一个“鸡肋”:完全独立设计的话费时费力,运用开源代码又很难弄懂。我当初也是如此。但想到毕竟开源代码已经做了很多工作,不用实 在可惜,最终毅然决定咬紧牙关弄懂rtklib。尝试用过rtklib的人都知道,其功能固然完全,然而代码却太过复杂,把人搅得一头雾水。想用vs2008使用那些代码,从添加文件到使用函数,简直是步步艰难。我已经从中吃了不少苦头,在用的时候也找不到比较详细的使用方法。不想后来者也像我一样,在rtklib使用中痛苦万分,故以现有的研究程度,对rtklib做个入门介绍。 关于rtklib的基本介绍,网上一堆,在此不再赘言,本文重点介绍如何用vs2008使用其src文件中的开源代码以及修改以完成自己需要的功能。 一、rtklib代码的添加 由于习惯了vs2008,在开发程序时用到这个编译器。添加过程如下: 1、在vs中新建一个控制台项目(含预编译头); 2、在建好的项目中添加rtklib.h以及需要用到的source文件(.c文件),然后将.c 改为.cpp并在每个文件首句增加一行#include "stdafx.h",当然在stdafx.h文件中添加#include "rtklib.h";这样编译基本可以通过了; 3、一般而言,我们不会需要用到rtklib程序集中的所有文件,只是需要部分。比如我需要用到其中的pntpos这个标准单点定位函数,这个时候就需要添加该函数所在实现文件(pntpos.c)。于是添加了这个文件。但是一般而言,只添加这一个可能不能解决问题,因为rtklib的各个文件之间并不是完全独立,pntpos文件中某些函 数可能会调用到其他文件中实现的函数。于是需要再把相关文件添加到工程中。对于这个问题,可以根据自己添加的文件,编译时候的提示,依次添加进来相应文件。这 样可以解决fatal error的问题;
北斗项目基本情况 一、什么是北斗项目? 北斗项目是中国的GPS项目,是中国自主的定位系统和遥测系统和授时系统。 北斗卫星导航系统﹝BeiDou(COMPASS)Navigation Satellite System﹞是中国正在实施的自主发展、独立运行的全球卫星导航系统。系统建设目标是:建成独立自主、开放兼容、技术先进、稳定可靠的覆盖全球的北斗卫星导航系统,促进卫星导航产业链形成,形成完善的国家卫星导航应用产业支撑、推广和保障体系,推动卫星导航在国民经济社会各行业的广泛应用。 北斗卫星导航系统由空间段、地面段和用户段三部分组成,空间段包括5颗静止轨道卫星和30颗非静止轨道卫星,地面段包括主控站、注入站和监测站等若干个地面站,用户段包括北斗用户终端以及与其他卫星导航系统兼容的终端。 二、北斗项目历史 据了解,早在上世纪70年代,我国就开始研究利用卫星进行地面定位服务,受制于当时国力不足等多方面原因,这项名为“灯塔”的研究计划搁浅了。 1983年,陈芳允和一位美国科学家同时提出利用地球同步卫星进行导航定位的设想。 他认为,基于国情,我国可以先发展技术相对简单、成
本较低廉的“双星快速定位通信系统”,这便是第一代“北斗”卫星导航系统的雏形。陈芳允的理论是:只要发射2颗地球静止轨道卫星,通过定位电波的电波数即可对地面物体进行定位。同时,由地面控制台处理各种业务,为陆地和海上的使用者提供定位、导航和通信服务。然而,陈芳允这一构想,起初并未被采纳。 转机出现在2年后。1985年,在南京紫金山天文台召开的全国测量技术研讨会上,执着的陈芳允再次阐述了他的“北斗”计划,并立下军令状:“给我2颗卫星,就能解决地面定位问题!”他充满自信的表态引起了参会部队首长的关注,解放军总参谋部的测绘制图局对“北斗”计划表现出极大兴趣。 1986年3月3日,陈芳允和王大珩、王淦昌、杨嘉墀等4位科学界泰斗联名致信中共中央,建议发展中国的高技术,受到邓小平的高度重视,促成我国发展高技术的“863”计划。此后,国防委工委开始全面参与“北斗”计划,着手研发应用工作。 1989年9月25日,第一代“北斗”可行性测试,在北京一间面积不足30平方的实验室内展开。结果显示,模拟计算数值与物体实际位臵间的误差不超过20米,试验取得巨大成功。1993年,“北斗”计划项目启动,中科院院士孙家栋就任总设计师。2000年10月31日,首颗试验卫星顺利
¥ 北斗用户机用户接口协议 (版本外用) 1.接口数据传输约定 串口非同步传送,参数定义如下: 传输速率:19200bit/s(默认),可根据用户机具体情况设置其它速率; 1 bit开始位; 8 bit数据位; 、 1 bit停止位; 无校验。 接口数据传输基本格式如下: — “指令”或“内容”传输时以ASCII码表示,每个ASCII码为一个字节; “长度”表示从“指令或内容”起始符“$”开始到“校验和”(含校验和)为止的数据总字节数; “用户地址”为与外设相连的用户机ID号,长度为3字节,其中有效位为低21bit,高3bit填“0”; “校验和”是指从“指令或内容”起始符“$”起到“校验和”前一字节,按字节异或的结果; “信息内容”用二进制原码表示,各参数项按格式要求的长度填充,不满长度要求时,高位补“0”。信息按整字节传输,多字节信息先传高位字节,后传低位字节; 对于有符号参数,第1位符号位统一规定为“0”表示“+”,“1”表示“-”,其后位数为参数值,用原码表示。
2.接口数据传输协议 > 外设至用户机信息传输格式 外设至用户机信息传输格式说明4.2.1 定位申请($DWSQ) 定位信息类别:
“普通”表示用户所在位置的大地高程数据<16300米或天线高<400米,“高空”表示用户所在位置的大地高程数据≥16300米或天线高≥400米; 当“测高方式”为“00”时,“高程数据和天线高”参数单位1米。对于普通用户,该参数高16bit(第1位为符号位)为天线所在点的大地高程数据,低16bit为天线高(填全“0”);对于高空用户,该参数为为天线所在点的大地高程数据,是无符号数; 当“测高方式”为“01”时,对于普通用户,“高程数据和天线高”参数高16bit 填全“0”,低16bit填天线距离地面的高度,单位为米;对于高空用户,该参数填天线距离地面的高度,单位为米; " 当“测高方式”为“10”时,对于普通用户,“高程数据和天线高”参数高16bit 填全“0”,低16bit填天线距离地面的高度,单位为米;对于高空用户,该参数填天线距离地面的高度,单位为米; 当“测高方式”为“11”时,对于普通用户,“高程数据和天线高”参数低16bit 填天线距离用户机中气压仪的高度,单位为米,高16bit填用户机中气压仪所处位置的概略正常高,其中第1位为符号位,单位1米;对于高空用户,“高程数据和天线高”参数填用户机中气压仪所处位置的概略正常高,单位1米。如果用户将概略正常高填为全“0”,则用户机在入站申请信息中自动填入该数据。 当“测高方式”为“00”和“01”时,“气压数据”参数填“0”;否则,该参数前20bit为气压,单位,后12bit(第1位为符号位)为温度,单位℃。如果用户使用用户机自带高精度气压仪提供的气压数据,则“气压数据”参数填“0”,用户机在入站申请信息中自动填入气压数据。 “入站频度”单位1秒,填“0”表示单次定位,需要按一定频度连续定位时填入设置频度。 通信申请($TXSQ) 通信信息类别:
北斗卫星导航系统 - 简介 北斗卫星导航系统 北斗卫星导航系统﹝BeiDou(COMPASS)Navigation Satellite System﹞是中国独立发展、自主运行,并与世界其他卫星导航系统兼容互用的全球卫星导航系统。 北斗卫星导航系统既能提供高精度、高可靠的定位、导航和授时服务,还具备短报文通信、差分服务和完好性服务特色,是中国国家安全、经济和社会发展不可或缺的重大空间信息基础设施。 北斗卫星导航系统包括北斗一号和北斗二号两代导航系统。其中北斗一号用于中国及其周边地区的区域导航系统,北斗二号是类似美国GPS的全球卫星导航系统。[1] 北斗卫星导航系统建设目标是:建成独立自主、开放兼容、技术先进、稳定可靠的覆盖全球的北斗卫星导航系统,促进卫星导航产业链形成,形成完善的中国卫星导航应用产业支撑、推广和保障体系,推动卫星导航在国民经济社会各行业的广泛应用。[2] 三步走 按照“质量、安全、应用、效益”的总要求,坚持“自主、开放、兼容、渐进”的发展原则,北斗卫星导航系统按照“三步走”的发展战略稳步推进。具体如下: 第一步,2000年建成北斗卫星导航试验系统,使中国成为世界上第三个拥有自主卫星导航系统的国家。 第二步,建设北斗卫星导航系统,2012年左右形成覆盖亚太大部分地区的服务能力。 第三步,2020年左右,北斗卫星导航系统形成全球覆盖能力。[3][4] 北斗卫星导航系统 - 系统组成 北斗卫星导航系统包括北斗一号和北斗二号的2代系统,由空间段,地面段,用户段三部分组成。 空间段
空间段包括五颗静止轨道卫星和三十颗非静止轨道卫星。地球静止轨道卫星分别位于东经5 8.75度、80度、110.5度、140度和160度。非静止轨道卫星由27颗中圆轨道卫星和3颗同步轨道卫星组成。 地面站 北斗导航卫星应用战略图 地面段包括主控站、卫星导航注入站和监测站等若干个地面站。 主控站主要任务是收集各个监测站段观测数据,进行数据处理,生成卫星导航电文和差分完好性信息,完成任务规划与调度,实现系统运行管理与控制等。 注入站主要任务是在主控站的统一调度下,完成卫星导航电文、差分完好性信息注入和有效载荷段控制管理。 监测站接收导航卫星信号,发送给主控站,实现对卫星段跟踪、监测,为卫星轨道确定和时间同步提供观测资料。 用户段 用户段包括北斗系统用户终端以及与其他卫星导航系统兼容的终端。系统采用卫星无线电测定(RDSS)与卫星无线电导航(RNSS)集成体制,既能像GPS、GLONASS、GALILEO系统一样,为用户提供卫星无线电导航服务,又具有位置报告以及短报文通信功能。 北斗卫星导航系统 - 导航信息 系统在L、S频段发播导航信号,L频段B1、B2和B3三个频点上发射开放和授权服务信号。B1:1559.052MHz-1591.788MHz B2:1166.22MHz-1217.37MHz B3:1250.618MHz-1286.423MHz
基于大数据的北斗泛在管理系统及其应用 2014.08.05 摘要:本文在泛在网络及北斗的应用基础上,基于物联网及大数据,建立了在事务状态数据化下进一步将事务之间的关系数据化,在数据资源化下,进一步将数据资源体系化的新型北斗动态管理系统模型,并结合北斗/GPS双模定位终端,提出了一个新型的最优化的北斗泛在管理系统SKYS-BD方案。 关键词:北斗,大数据,定位服务,动态管理, 泛在网,动态管理,智慧城市 一、引言 泛在、智能、协同、融合是信息通信技术发展的主要方向,而大数据伴随着云计算、移动互联网等技术的发展,为智慧城市及信息化的动态管理方案提供了新的契机。在智慧城市建设成为我国的战略热点的时机下,大数据产业生态环境的加速构建与北斗导航定位的结合呈现出集成化、多元化和学科交叉现象,同时北斗与全球的定位技术从常规静态逐步发展到准动态、动态和实时定位阶段,正向着实时、高精度、高可靠性的方向发展,结合大数据的架构管理及终端技术的提高,北斗最终将实现产品化并应用于广泛领域。 本文从北斗应用管理入手,结合泛在网络下的应用,构建以指标体系为核心的“数据+服务体系”,同时给出新型系统SKYS-BD的应用解决方案。 二、系统设计思路 本文提出的基于大数据的北斗泛在管理系统,不仅仅是一个技术方案,而且是一个服务体系,是一个以政治、经济、文化,民生为基础,以“发展更科学,管理更高效,生活更美好”为目标的管理体系方案。大数据化是为了更好的处理好数据,做好数据的挖掘工作,在合理时间内达到撷取、管理、处理、并整理成为帮助系统决策的目的。基于大数据的结构如图1:
1 多种通信方式: SKYS-BD模块化设计,利用独立的通信驱动库,在不影响核心和业务模块的基础上,支持各种通信方式,所有通信驱动程序都遵守相同的驱动库规范,可靠性、可维护性、可扩展性大大提高。 2 泛终端接入: 拥有通信驱动库和定位模式库后,终端驱动程序只是通信驱动程序和定位模式程序的组合,从而使其编写非常简单,且终端与SKYS-BD可做到无关,面对复杂多变的终端市场,可灵活、低成本的接入各类终端,使SKYS-BD的用户可以非常容易的支持各类终端用户,从而使最低成本的支持最多数用户成为可能。 3 SKYS-BD海量数据存储,先进的核心架构 SKYS-BD系统采用了 MPP(大规模并行处理)方式,无共享,每个 SMP节点也可以运行自己的操作系统、数据库等。节点之间的信息交互是通过节点互联网络实现的,当需要处理的事务