目录
1 技术要求 (1)
2 设计思路 (1)
2.1 基本原理 (1)
2.2 设计流程图 (2)
3 软硬件设计 (4)
3.1 硬件设计 (4)
3.2 软件设计 (5)
3.2.1 建立工程 (5)
3.2.2 编写代码 (7)
4 调试报告及结果 (13)
4.1 调试报告 (13)
4.2 调试结果 (15)
5 心得体会 (19)
6 参考文献 (20)
数字通信系统模拟综合实践
1 技术要求
利用通信系统中的编解码理论以及通常的编解码方式,数字信号处理中的滤波方式以及比较简单的几种具体的滤波算法,利用多块单片机构建一个简单的通信系统,实现多块单片机之间的串行通信。
每片单片机都能够实现数据的收发;发送端在发送数据之前要求对数据进行简单的编码,接收端在接收数据之后需对所接收的数据进行解码,并且再重新编码通过串口发送出去。
发送端在发送完数据之后应准备接收数据,并将接收的数据进行解码与原始的发送数据进行比较,判断是否一致,若不一致发出一声报警声作为提示音,同时系统上的一个发光二极管点亮。
单片机作为接收端接收数据时为了提高准确性,采用一定的滤波算法进行滤波处理,然后才将所接受的数据进行解码。
2 设计思路
2.1 基本原理
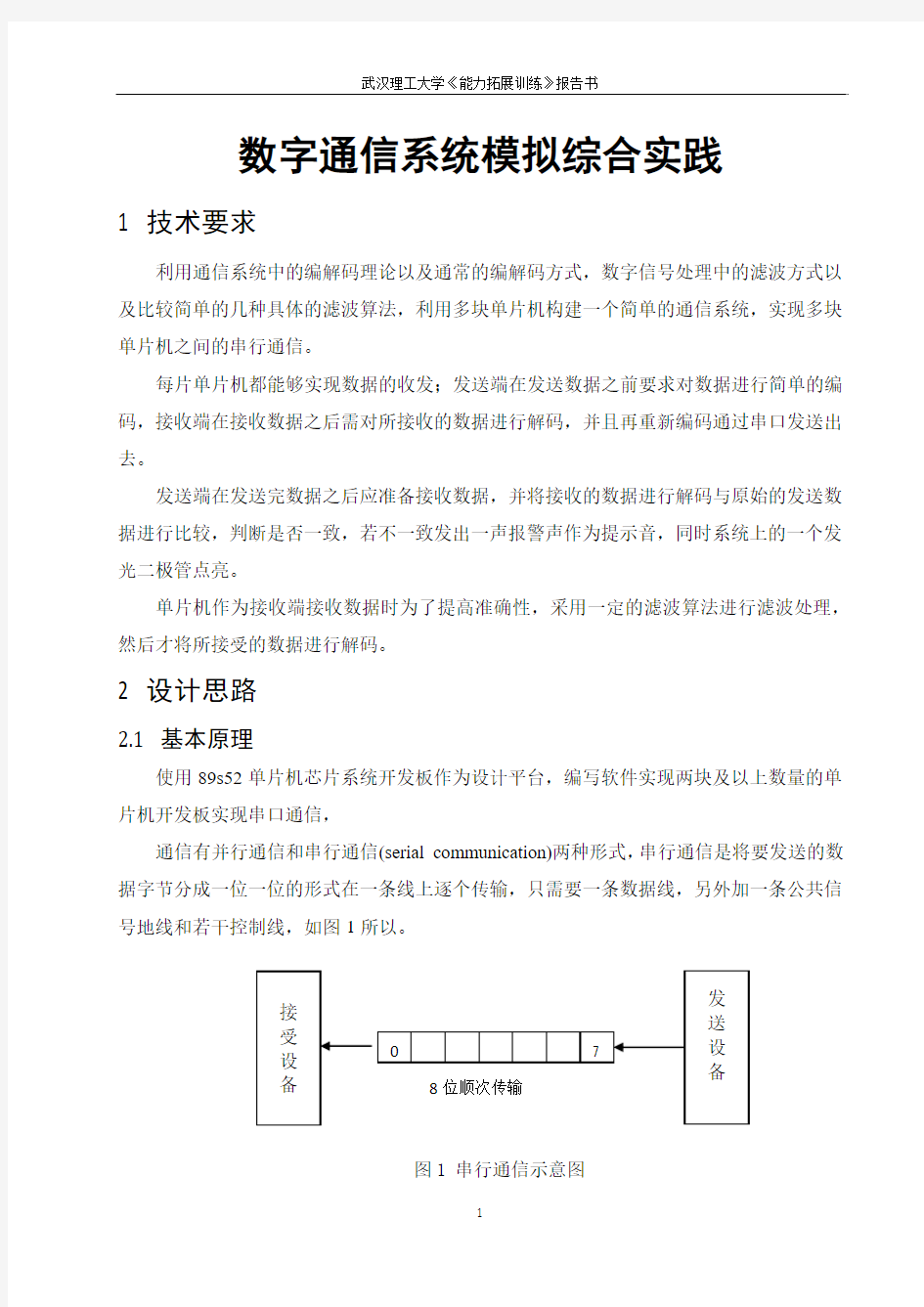
使用89s52单片机芯片系统开发板作为设计平台,编写软件实现两块及以上数量的单片机开发板实现串口通信,
通信有并行通信和串行通信(serial communication)两种形式,串行通信是将要发送的数据字节分成一位一位的形式在一条线上逐个传输,只需要一条数据线,另外加一条公共信号地线和若干控制线,如图1所以。
图1 串行通信示意图
串行通信串行口寄存器SCON的控制是十分重要的,它决定了串行口通信的方式。如表1所示,SCON的各位代表的意义。
表1 串行口控制寄存器SCON
SM0和SM1是控制工作方式的选择位,串行口有四种工作方式,它们由SM0和SM1设定,对应关系如表2所示。
表2 串行口工作方式的控制表
对于SCON中其他的各位也都有着很重要的作用,RI是接收中断标志位,TI是发送中断标志位,REN是允许串行口中断接收数据位。
在编码阶段,使用曼彻斯特码(又叫“双向码”)进行编码,编码特点是将“1”编码为“10”,“0”编码为“01”,曼彻斯特码多适用于短距离通信的编码,且编码原理简单。解码反之亦然,将“10”变为“1”,将“01”变为“0”。.
在解码之前为了提高准确率,可以对编码进行滤波,滤波常用的方法有限幅滤波法、中值滤波法、算术平均滤波法、加权平均滤波法、滑动平均滤波等。
其中本次设计采用了限幅滤波法,它的原理就是对两次连续的编码进行比较,如果两者差值A在一定范围内即可,超出范围则视为编码错误。
限幅滤波法主要用于处理变化较为缓慢的数据,如温度、物体的位置等。使用时,关键要选取合适的门限制A。
在解码完成后,解码端将解码的数据再次通过串行口发送给编码端,编码端将他与编码的初值对比,如果两者相等在认为整个编码、、滤波、解码、验证过程正确,否则编码端会再次对初值进行编码,然后再次完成整个过程,直至正确为
2.2 设计流程图
综合上述原理,根据要求画得设计流程图如下图2所示。
图2 设计流程图
3 软硬件设计
3.1 硬件设计
硬件的设计主要使用的是Proteus(v7.5)这款软件,设计硬件结构图如下图3所示。
图3 硬件结构图
在上图3中,主要是设计了双机U1和U2之间的通信,采用INT0的外部中断来改变初值,初值的范围在0至9之间,并且将初值显示出来,而后的曼彻斯特编码结果也进行十进制的转换显示出来,最后解码的值也将显示出来。
至于其中的二极管则是分别采用了红色和绿色两种指示灯来表示“Error”和“Normal”,并且通过NPN型三极管放大之后与Buzzer相接,实现声音和灯光的双重报警功能。对于构成设计结构图的各种原件具体参数详见下表3。
表3 结构图构成原件的具体参数表
3.2 软件设计
3.2.1 建立工程
软件设计主要是使用了Keil(uv4.0)这款C语言编译软件,首先必须建立起一个Project,直接点击“Project”,选择“new vision Project”,在自动弹出的保存窗口命名为“串行口编解码通信”,而后可任意选择保存路径,这样便进入了选择芯片生产厂商和型号的关键步骤,如下图4所示。
图4 创建工程示意图
接下来要选择芯片生产厂商和型号,本次设计使用的额是89C52芯片,他是Atmel公司生产的,选中89C52这款C51系列芯片,然后点击确定。
穿件“.C”文件,首先点击“File”选中“New”,此时“.C”文件并未得到保存,点击保存,会自动跳到工程建立的路径文件夹,命名不固定可随意,但是必须以“.C”结尾,保存即可,如图5所示。
图5 创建C文件示意图
虽然C文件和Project都在同一个文件夹,但是C文件并未与Project发生直接联系,所以还要将这个C文件添加到工程里面来,所图6所示。
图6 向Project中添加C文件示意图
最后一步是关于编译输出,因为无论是汇编语言还是C语言,编译之后都要生成“.HEX”文件,C51芯片才能识别并且工作,所以选中“Project”下拉框中的“Option for Target
‘Target1’”,在弹出的对话框中,选择“Output”选项卡,在“Create HEX File”选项框
中打勾,然后点击“OK”,如下图7所示。
图7 选中生成HEX文件示意图
此时,一个完整的Project就建立完成了,剩下的便是编写代码了。
3.2.2 编写代码
在Keil中可以用C语言也可以使用汇编语言,本次设计是采用的C语言,部分重要代码如下。
1)主函数main()函数的初始化
main()
{
TMOD=0x20;//TMOD=0x20是定义定时器1工作方式为2,即8位初值重装
TH1=0xfd;
TL1=0xfd;//设定初值决定比特率
TR1=1; //启动定时器1
SM0=0;//设定串口工作模式1
SM1=1;//
REN=1; //
EA=1;//总中断允许
ES=1;//串行口中断允许
value=0;
IE=0x81; //允许INT0 中断
IT0=1; //下降沿触发
T_display(value);
R_display(value);
flag1=1;//标志位
led_red=0;
while(1)
{
encode(value);//编码这个数字
T_display(value);
if(flag1) {decode(high1,low1); flag1=0;}
}
}
在初始中有几个重要的点,首先是要使用一个定时器1,因为串口通信要有比特率的设定,而比特率就是通过定时器1的初值决定的,但是此时的串口中断与定时器无关。
在对串口的工作方式设定时,“SM0=0;SM1=1;”之后的“REN=1;”顺序十分关键,不可放在“SM0=0;SM1=1;”之前,因为REN位的作用是允许串口接收数据,若该写在SM0和SM1的前面,当上电时SCON复位为0x00,此时REN=1执行后,“SM0”和“SM1”并未设定,单片机会默认按照0方式发送,这样会吧初值0进行传输。就会造成错误。
2) 编码函数encode()
void encode(uchar value1)
{
high=0;low=0;
for(i=0;i<4;i++) //对高四位进行编码
{
value1=value1<<1;//左移出1位,该位自动进入CY
if(CY) high=high|tabe1[i+4];
else high=high|tabe1[i];
}
for(i=0;i<4;i++) //对低四位进行编码
{
value1=value1<<1;//左移出1位,该位自动进入CY
if(CY) low=low|tabe1[i+4];
else low=low|tabe1[i];
}
send(high);
send(low);
xx=(high+low)/100;
yy=(high+low)%100/10;
zz=(high+low)%10;
codedis(xx,yy,zz); //编码显示
}
编码的思想是将“1”变为“10”,将“0”变为“01”,那么高四位和低四位编码后就会得到两个字节,命名为“high”和“low”,每次移出一位“high”和“Low”就会发生一次变化。举例来说,如果左移第一位即最高位D7且D7为“1”,那么“high”就是“00000000”和“10000000”相或,反之D7为“0”,“high”就是“00000000”与“01000000”相或,0至1对应的相或量如下表4所示.
表4 编码相或表
续表4
3) 编码值显示函数codedis()
voidcodedis(ucharxx,ucharyy,ucharzz)
{
w1=1;
w2=1;
w3=1;
P1=tabe[xx];//百位显示
w1=0;
delay(100);
w1=1;
P1=tabe[yy];//十位显示
w2=0;
delay(100);
w2=1;
P1=tabe[zz];//个位显示
w3=0;
delay(100);
w3=1;
}
函数中“w1”、“w2”和“w3”三个变量是三个数码管的“位选”,他们共用一个I/O从而节省I/O资源,位选决定哪一个显示哪一个不显示,该函数的功能就是随时显示当前编码值。
4) 解码函数decode()
void decode(ucharbb,uchar cc)
{
devalue=0;
filter(bb,cc);
{
for(i=0;i<7;i++) //对高位bb进行解码
{
bb=bb<<1;//左移出1位,该位自动进入CY if(i%2==0)
{
if(CY) devalue=devalue+tabe2[i/2+1];
else devalue=devalue+tabe2[0];
}
}
for(i=0;i<7;i++) //对低位cc进行编码{
cc=cc<<1;//左移出1位,该位自动进入CY if(i%2==0)
{
if(CY) devalue=devalue+tabe2[i/2+5];
else devalue=devalue+tabe2[0];
}
}
send(devalue);
R_display(devalue);
send(devalue);
}
}
解码的原理基本跟编码的差不多,也是通过移位,判断“CY”的状态决定解码值。举例来说,当对高四位的编码high即high1解码时,D7左移后,若D7为“1”说明解码后的devalue的D7就是1,devalue=00000000B+10000000B=10000000B,对于D6、D4等偶数下标位不具实质意义,只看奇数位,再若D5是1,那么解码后的devalue的D6便是1,即devalue=1000000B+01000000B=11000000B ,以此类推,其中0和1的解码相加量如下表5所示。
表5 解码相加量与0和1的对应关系表
5) 校验报警函数check()
void check(ucharcheckvalue)
{
if(checkvalue!=value) {led_red=1;led_green=0;}
else {led_red=0;led_green=1;}
}
检校报警函数主要是检验解码之后的值与初值是否相等,如果相等那么green的led 会点亮,当解码值与初值不一致时则red的led会点亮,同时报警喇叭也会发出声音报警。
6) 滤波函数filter()
void filter(uchar bb, uchar cc)
{
for(i=0;i<10;i++)
{
if((bb-0x55==tabe3[0])&((cc-bb)==tabe3[i])) {critical=1;break;}
else critical=0;
}
}
过滤函数使用的是限幅滤波算法,因为初值在0-9之间变化,没有触发中断的时候
初值不会发生变化,变化是缓慢的。10个数的编码解码差值也是10个值,所以只需验
证每次编码之后,High和Low之间的差值即可,在一定范围内可视为正确。
4调试报告及结果
4.1 调试报告
程序代码生成HEX文件之后,在Proteus中便可实现模拟了,出现的问题需要不断的修改程序,这是每一个程序代码编写者需经的步骤,找到问题的根源,既是对知识的加固,又能积累经验,尽量减少再犯同类错误,下面列举几个我在调试过程中遇到的比较麻烦的几个问题。
1) 关于左移与变量类型的问题。
在编码阶段,可以另外设计一个简单的显示三位数的电路,将编码函数这段代码复制到新建的函数中去,修改之后,使得三位数码管能够显示编码的结果,否则当将所有的代码全部写完了修改的时候是非常困难调试的。
在编码函数中,有如下的一部分代码:
for(i=0;i<4;i++) //对高四位进行编码
{
value1=value1<<1;//左移出1位,该位自动进入CY
if(CY) high=high|tabe1[i+4];
else high=high|tabe1[i];
}
使用的左移,不是右移,左移就是将最高位D7移至CY中,然后判断CY是1或者0,从而选择如何编码,但是开始的时候我所有的变量全部定义的是int型,无法正常显示出
编码值,逻辑上往复的检查也没错误,花费了很多时间才找到根源所在。
Int行在C语言中,它分配内存时是两个字节(Byte),比如int型的1完整写法是0x0001,但出于习惯在高位全为0时我们简写为0x01。
Char型是一个字节,1的完整写法是0x01。倘若初值value=1定义为int型,左移之后,这个1并未进入CY,而是低位的D7进入到了高位的D1,便是0x0100,所以函数最后判断的value的每一位D0至D7全是0,没有1,这就是错误的根源。
当然,如果采用右移的方法那就不会影响了,无论几个字节,都是直接移到了CY,总的来说,我们在定义变量的时候,没有必要的时候我们应该有节省内存资源的这种意识,这是一个好的程序员必须的素质。
2) 关于串行口工作方式的定义
在void main()函数的初始化部分中,有一部分代码如下:
SM0=0;//设定串口工作模式1
SM1=1;
REN=1; //允许串行口接收数据
这是调试成功之后的代码,之前的代码如下:
REN=1; //允许串行口接收数据
SM0=0;//设定串口工作模式1
SM1=1;
在基本原理中,提到了SM0、SM1和REN的作用,三者看似很简单的语法,仅仅是初始化顺序不一样。但是在串行口的实际运行中,顺序一点也不能错,不然就会出现错误,甚至是的整个程序无法工作。
初始化的时候,确定在模拟中要使用串行口交互通信,此时REN是必须为1的,当“REN=1;”位于“SM0”和“SM1”之前的时候,单片机一上电SCON控制寄存器复位初始化,SM0和SM1均为低电平,运行完“REN=1;”控制器便认为两块C51芯片之间可以相互发送数据,但是当前控制器并不知道该以哪一种方式发送数据,所以它就默认的选择了“SM0=0;SM1=1;”即工作方式为0。
至于发送的数据是什么,控制器也不知道,因为现在CPU才运行到初始化这里,还没到赋初始值的步骤,这个时候控制器就会“闲不住”要发“0”,“0”从何处来?数据发送端“TXD”还是复位的状态为低电平,所以控制器就会自动的运行“SBUF=0;”,于是在
“SM0=1”和“SM1=0”并未运行的时候就已经开始工作了。
0被传送过去后,引发串口中断,此时串口中断内部所以可以引发的函数全部自动的运行了,这是我们不想看到的,也是错误的根源。
4.2 调试结果
调试成功后,在Proteus中运行模拟我们就会看到正确的编码解码显示,根据编码和解码的算法,对于0到9这10个初值的编码值见下表6,为结果提供佐证。
表6 初始值与编码值对比表
在Keil中对整个代码进行编译,“Error”和“Warning”编译的结果如图8所示,说明正需逻辑上完全正确。
图8 Keil中编译结果图
如下图9所示。
图9 U1发送“4”时的模拟图
在图9中,U1的发送端显示的是“4”,编码值为“186”,这与表6完全吻合,U2端解码端也显示了4,报警灯显示为绿色“Normal”,表示编码、解码、验证和滤波均正常。
U2的初始值默认为0,那么它的解码值为“170”,这与表6完全吻合,U1端的解码端也显示为0,报警灯显示为绿色“Normal”,表示编码、解码、验证和滤波均正常。
如下图10所示。
图10 U2端发送8时的结果图
在图10中,U2的发送端显示的是“8”,编码值为“234”,这与表6完全吻合,U1端解码端也显示了8,报警灯显示为绿色“Normal”,表示编码、解码、验证和滤波均正常。
U1的初始值默认为0,那么它的解码值为“170”,这与表6完全吻合,U2端的解码端也显示为0,报警灯显示为绿色“Normal”,表示编码、解码、验证和滤波均正常。
下图11所示。
图11 U1和U2双向通信编码解码结果图
在图11中,U2的发送端显示的是“9”,编码值为“235”,这与表6完全吻合,U1端解码端也显示了9,报警灯显示为绿色“Normal”,表示编码、解码、验证和滤波均正常。
U1的发送端显示的是“5”,编码值为“187”,这与表6完全吻合,U2端解码端也显示了5,报警灯显示为绿色“Normal”,表示编码、解码、验证和滤波均正常。
根据上面的整体结果分析,本次设计是完整和正确的,达到了实验设计的要求。
5 心得体会
本次数字通信设计主要是学会了使用编译软件Keil,烧录软件ISP和模拟软件Proteus,这三款软件在电子电路设计中,特别是单片机的运用中非常重要,通过实践也加深了对理论知识的理解。
本次课程设计主要是运用了《通信原理》《微处理器与微控制器原理》的理论知识点,以前并没有实际运用,现在实践起来就必须得复习这些理论知识,最后最晚了课设觉得这些用到了的知识点很简单了,理解的也更深刻了,看来实践确实是个好法子。
通信原理的只是主要用到了编码解码的知识,编码有很多方法,比如HDB3码、NRZ 码、RZ码,双向码等。我选择的是曼彻斯特码,这个码型只能适用于短距离通信,单片机的串行口通信只能在几十米范围没,曼彻斯特码刚好满足了他这一特点,另外我选择的优点之一就是简单,曼彻斯特码编码解码都很容易,初学者很有必要选取这样的码型,培养了兴趣,我相信我以后对那些更高级更困难的码型我也敢于挑战,初学者忌讳一上来就选择很难的码型,既花费时间又打击信心,这样的额事是不值得学的。
通信原理很重要,我们生活在信息时代,生活的角角落落都是信息,我们作为工科生特别是信息类的,就应该学号通信原理,在以后我们才能更好的运用。
本次课设还一个很重要的因素,那就是C语言,很多人说C语言很难,其实我觉得在所有的语言里,C语言是好学的,也最易理解的,但是它和汇编一样,很麻烦,每一条语句你都得写,不想C++有现成的类,你直接调用,但是C++看起来让人生畏,所以C 语言是最基本的,必须学好。
对于单片机,特别感谢郭天祥老师,在自学的时间里,买了郭天祥老师的书籍开发板,自己不断的去学习,既捡回了C语言,在这我的C语言得到了很大的提升,基本都能完成,另外学习了单片机的C语言语法,对于单片机也有了基本的掌握,这就是电子世界的魅力,在一串规律的定义了字符串下,控制住了宏观的动态变化,对于单片机,算得上是“无心插柳柳成荫”啊。
在自己感兴趣的道路上前进,做自己感兴趣的事情,不能说这不是一件人生最快乐的事情。
数字微波通信技术的发展及应用 摘要:数字微波通信技术是在时分复用技术的基础上发展而来的一种新技术, 不仅可以传输电话信号,还可以传输数据信号及图像信号,所以在十分广泛的领 域都得到了应用,特别是在科学技术日新月异的当今时代,数字微波通信技术大 的发展前景十分广阔,应用范围也越来越广泛。可见,对数字微波通信技术的发 展及应用进行研究具有十分重要的现实意义,本文主要对此进行探究。 关键词:数字微波通信技术;发展;应用 微波是当今时代应用范围十分广阔的一种通信传输方式,数字微波通信技术 就是利用微波来传输数字信息的一种方式,同时还能够利用电波空间传输各种信 息甚至是对相互之间没有任何关联的信息进行传输,而且还能够在此基础上再生 中继,不得不说这是一种发展十分迅速的一种通信方式,本文主要对数字微波通 信技术的发展及应用进行研究,希望能够有效促进数字微波通信技术的不断发展。 1 数字微波通信技术的特点 数字微波通信技术之所以发展迅速且应用范围十分广泛是因为其具有其独特 的优势。数字微波通信技术的特点及其具体表现详见下表: 表1 数字微波通信技术的特点及其具体表现 2 数字微波通信技术的发展 微波通信技术是微波频段借助于地面视距进行信息传播的一种无线通信技术,已经出现了近几十年的时间。在出现初期阶段,微波通信系统通常是模拟制式的,它与当时的同轴电缆载波传输系统相同都是通信网长途传输干线的重要传输方式。具体而言,我国各个城市之间的电视节目是通过微波来进行传输的。20世纪70 年代初期随着科学技术的进步,人们开发出了几十兆比特每秒容量的数字微波通 信系统,可以说这个阶段是通信技术自模拟阶段向数字阶段转变的关键时期。20 世纪80年代末期,同步数字系列在传输系统中已经变得十分常见,可以说已经 被普遍应用,数字微波通信系统的容量也随之不断增大。当前,我们已经进入了 科学技术日新月异的新时代,数字微波通信技术与光纤、卫星一起被看作现代通 信技术的重中之重。 当今时代,数字微波通信技术不仅在传统传输领域内得到了关注,更在固定 宽带接入领域得到了众多专家学者的高度重视,可见数字微波通信技术发展态势 良好,发展前景十分广阔。 3 数字微波通信技术的主要发展方向 3.1 实现正交幅度调制级数的提升以及严格限带 要有效提升数字微波通信技术的频谱利用率一般需要应用到多电平正交幅度 调制技术,当前阶段,通常要应用到256与512正交幅度调制,未来还会应用到1024和2048正交幅度调制。此外,对于信号滤波器的设计要求也会变得越来越 严格,必须要确保其余弦滚降系数可以维持在一定范围内。 3.2 网格编码调制及维特比检测技术 采取复杂的纠错编码技术可以有效降低系统的误码率,但是这会导致系统的 频带利用率随之降低。这就要求我们必须采取有效措施来解决此问题,网格编码 调制技术就是不错的选择,可以有效处理该问题。需要注意的是,利用网格编码 调制技术需要使用维特比算法来进行解码。但是,在数字信号高速传输的当今时代,使用这种解码算法是具有一定难度的。
上海市高等教育自学考试 工业自动化专业(独立本科段)(B080603)控制系统数字仿真 (02296) 自学考试大纲 上海交通大学自学考试办公室编上海市高等教育自学考试委员会组编 2013年
I、课程的性质及其设置的目的和要求 (一)本课程的性质与设置的目的 “控制系统数字仿真”是利用数字计算进行各种控制系统分析、设计、研究的有力工具,是控制系统工程技术人员必须掌握的一门技术。 本课程是工业自动化专业的专业课程,也是一门理论和实际紧密结合的课程。 通过本课程的学习,学生能掌握系统仿真的基本概念、基本原理及方法;掌握基本的仿真算法及能用高级编程语言在微机上编程实现,学会使用常用的仿真软件。为学习后继课程、从事工程技术工作、科学研究以及开拓性技术工作打下坚实的基础。 (二)本课程的基本要求 1.要求掌握系统、模型、仿真的基本概念,这是学好仿真这门课程的概念基础。 2.掌握常用的连续系统数学仿真算法及能用某种高级编程语言上机实现。 3.初步掌握利用微机来分析、设计、研究控制系统的方法与仿真技术。 (三)本课程与相关课程的联系 先修课程:自动控制原理、现代控制理论基础、高级编程语言。
II、课程内容与考核目标 第1章概论 (一)学习目的和要求 通过本章学习,了解系统的概念,系统的分类方法及特点,仿真的应用目的。了解模型的基本概念,熟悉模型的分类方法及特点。掌握仿真的基本概念,仿真的分类方法及特点。熟悉仿真的一般步骤,仿真技术的应用,熟悉计算机仿真的三要素及基本活动。 (二)课程内容 第一节系统、模型与仿真 1.系统 2.模型 3.仿真 4.仿真科学与技术的发展沿革 第二节系统仿真的一般知识 1.相似理论 2.基于相似理论的系统仿真 3.系统仿真的类型 4.系统仿真的一般步骤 第三节仿真科学与技术的应用 1.仿真在系统设计中的应用 2.仿真在系统分析中的应用 3.仿真在教育与训练中的应用 4.仿真在产品开发及制造过程中的应用 第四节当前仿真科学与技术研究的热点 1.网络化仿真技术 2.复杂系统/开放复杂巨系统的建模与仿真
南阳理工学院本科生毕业设计(论文) 学院(系):电子与电气工程系 专业:电子信息工程 学生:胡鹏 指导教师:曹原 完成日期2011年 4月
南阳理工学院本科毕业设计(论文) 模拟电话通信系统的硬件设计Hardware’s Design of Communication Systems 总计:毕业设计(论文)页 表格:0 个 插图:10 幅
南阳理工学院本科毕业设计(论文) 模拟电话通信系统的硬件设计 Hardware design of Analog telephone communication system 学院(系):电子与电气工程系 专业:电子信息工程 学生姓名:胡鹏 学号:094409042 指导教师(职称):曹原(讲师) 评阅教师: 完成日期:2011年5月17日 南阳理工学院 Nanyang Institute of Technology
模拟电话通信系统的硬件设计 电子信息工程专业胡鹏 [摘要]随着现代通信技术的飞速发展与日益普及,程控交换是目前模拟电话通信系统中的核心。本文介绍的模拟电话通信系统的硬件设计以amt89c51单片机为中心控制交换芯片MT8816设计实现一种高性价比,实现一对一双工通信的程控交换设备。 本文详细阐述了程控电路交换机在交换电话网中的作用、工作原理和系统的组成结构,将程控交换机的硬件设计分为几个功能模块,并分别加以详细地介绍。 该系统硬件包括了:以单片机为核心的信号检测、信号音控制电路;双音多频解码电路;交换电路;两个用户接口电路等。 [关键词]AT89C51;程控交换;模拟;硬件 Hardware design of Analog telephone communication system Electronic and Information Engineering Hu Peng Abstract:With the rapid development of modern communication technology and the increasing popularity of program-controlled exchange is the core of the current field of communications. Analog telephone communication system to amt89c51 microcontroller hardware design as the central control switch chip MT8816 Design and Implementation of a cost-effective, one-duplex communication to achieve program-controlled switching equipment. This paper describes the program-controlled circuit switched telephone network switches in the role, working principle and system structure, the program-controlled switches, the hardware design is divided into several functional modules, respectively, to introduce them in detail. The system hardware includes: a microcontroller as the core of the signal detection, signal tone control circuit; DTMF decoder circuit; switching circuit; two user interface circuit. Key words:AT89C51、Program-controlled exchange、Simulation、hardware
实验一频分复用和超外差接收机仿真实验 实验目的 1熟悉Simulink模型仿真设计方法 2掌握频分复用技术在实际通信系统中的应用 3理解超外差收音机的接收原理 实验内容 设计一个超外差收接收机系统,其中发送方的基带信号分别为1000Hz的正弦波和500Hz的方波,两路信号分别采用1000kHz和1200kHz的载波进行幅度调制,并在同一信道中进行传输。要求采用超外差方式对这两路信号进行接收,并能够通过调整接收方的本振频率对解调信号进行选择。 实验原理 超外差接收技术广泛用于无线通信系统中,基本的超外差收音机的原理框图如图所示: 图1-1超外差收音机基本原理框图 从图中可以看出,超外差接收机的工作过程一共分为混频、中频放大和解调三个步骤,现分别叙述如下: 混频:由天线接收到的射频信号直接送入混频器进行混频,混频所使用的本机振荡信号由压控振荡器产生,并可根据调整控制电压随时调整振荡频率,使得器振荡频率始终比接收信号频率高一个中频频率,这样,接受信号与本机振荡在混频器中进行相乘运算后,其差频信号的
频率成分就是中频频率。其频谱搬移过程如下图所示: 图1-2 超外差接收机混频器输入输出频谱 中频放大:从混频模块输出的信号中包含了高频和中频两个频率成分,这样一来只要采用中频带通滤波器选出进行中频信号进行放大,得到中频放大信号。 解调:将中频放大后的信号送入包络检波器,进行包络检波,并解调出原始信号。 实验步骤 1、设计两个信号源模块,其模块图如下所示,两个信号源模块的载波分别为1000kHz,和1200kHz,被调基带信号分别为1000Hz的正弦波和500Hz的三角波,并将其封装成两个子系统,如下图所示: 图1-2 信源子系统模型图 2、为了模拟接收机距离两发射机距离不同引起的传输衰减,分别以Gain1和Gain2模块分别对传输信号进行衰减,衰减参数分别为0.1和0.2。最后在信道中加入均值为0,方差为0.01的随机白噪声,送入接收机。 3、接收机将收到的信号直接送入混频器进行混频,混频所使用的本机振荡信号由压控振荡器产生,其中压控振荡器由输入电压进行控制,设置Slider Gain模块,使输入参数在500至1605可调,
数字通信系统的模型 ? 数字通信系统的分类 ?数字通信系统可进一步细分为数字频带传输通信系统、数字基带传输通信系统、模拟信号数字化传输通信系统。 1. 数字频带传输通信系统 数字通信的基本特征是,它的消息或信号具有“离散”或“数字”的特性,从而使数字通信具有许多特殊的问题。例如前边提到的第二种变换,在模拟通信中强调变换的线性特性,即强调已调参量与代表消息的基带信号之间的比例特性;而在数字通信中,则强调已调参量与代表消息的数字信号之间的一一对应关系。 另外,数字通信中还存在以下突出问题:第一,数字信号传输时,信道噪声或干扰所造成的差错,原则上是可以控制的。这是通过所谓的差错控制编码来实现的。于是,就需要在发送端增加一个编码器,而在接收端相应需要一个解码器。第二,当需要实现保密通信时,可对数字基带信号进行人为“扰乱”(加密),此时在收端就必须进行解密。第三,由于数字通信传输的是一个接一个按一定节拍传送的数字信号,因而接收端必须有一个与发端相同的节拍,否则,就会因收发步调不一致而造成混乱。另外,为了表述消息内容,基带信号都是按消息特征进行编组的,于是,在收发之间一组组的编码的规律也必须一致,否则接收时消息的真正内容将无法恢复。在数字通信中,称节拍一致为“位同步”或“码元同步”,而称编组一致为“群同步”或“帧同步”,故数字通信中还必须有“同步”这个重要问题。 综上所述,点对点的数字通信系统模型一般可用图1-3 所示。
需要说明的是,图中调制器/ 解调器、加密器/ 解密器、编码器/ 译码器等环节,在具体通信系统中是否全部采用,这要取决于具体设计条件和要求。但在一个系统中,如果发端有调制/ 加密/ 编码,则收端必须有解调/ 解密/ 译码。通常把有调制器/ 解调器的数字通信系统称为数字频带传输通信系统。 2. 数字基带传输通信系统 与频带传输系统相对应,我们把没有调制器/ 解调器的数字通信系统称为数字基带传输通信系统,如图1-4 所示。 图中基带信号形成器可能包括编码器、加密器以及波形变换等,接收滤波器亦可能包括译码器、解密器等。 3. 模拟信号数字化传输通信系统 上面论述的数字通信系统中,信源输出的信号均为数字基带信号,实际上,在日常生活中大部分信号(如语音信号)为连续变化的模拟信号。那么要实现模拟信号在数字系统中的传输,则必须在发端将模拟信号数字化,即进行A/D 转换;在接收端需进行相反的转换,即D/A 转换。实现模拟信号数字化传输的系统如图1-5 所示。
Matlab通信原理仿真 学号: 2142402 姓名:圣斌
实验一Matlab 基本语法与信号系统分析 一、实验目的: 1、掌握MATLAB的基本绘图方法; 2、实现绘制复指数信号的时域波形。 二、实验设备与软件环境: 1、实验设备:计算机 2、软件环境:MATLAB R2009a 三、实验内容: 1、MATLAB为用户提供了结果可视化功能,只要在命令行窗口输入相应的命令,结果就会用图形直接表示出来。 MATLAB程序如下: x = -pi::pi; y1 = sin(x); y2 = cos(x); %准备绘图数据 figure(1); %打开图形窗口 subplot(2,1,1); %确定第一幅图绘图窗口 plot(x,y1); %以x,y1绘图 title('plot(x,y1)'); %为第一幅图取名为’plot(x,y1)’ grid on; %为第一幅图绘制网格线 subplot(2,1,2) %确定第二幅图绘图窗口 plot(x,y2); %以x,y2绘图 xlabel('time'),ylabel('y') %第二幅图横坐标为’time’,纵坐标为’y’运行结果如下图: 2、上例中的图形使用的是默认的颜色和线型,MATLAB中提供了多种颜色和线型,并且可以绘制出脉冲图、误差条形图等多种形式图: MATLAB程序如下: x=-pi:.1:pi; y1=sin (x); y2=cos (x); figure (1); %subplot (2,1,1); plot (x,y1); title ('plot (x,y1)'); grid on %subplot (2,1,2); plot (x,y2);
现代工程控制理论 实验报告 实验名称:控制系统数字仿真技术 实验时间: 2015/5/3 目录 一、实验目的 (2) 二、实验容 (3)
三、实验原理 (3) 四、实验方案 (6) 1、分别离散法; (6) 2、整体离散法; (7) 3、欧拉法 (9) 4、梯形法 (9) 5、龙格——库塔法 (10) 五、实验结论 (11) 小结: (14) 一、实验目的 1、探究多阶系统状态空间方程的求解; 2、探究多种控制系统数字仿真方法并对之进行精度比较;
二、 实验容 1、 对上面的系统进行仿真,运用分别离散法进行分析; 2、 对上面的系统进行仿真,运用整体离散法进行分析; 3、 对上面的系统进行仿真,运用欧拉法进行分析; 4、 对上面的系统进行仿真,运用梯形法进行分析; 5、 对上面的系统进行仿真,运用龙泽——库塔法进行分 析; 6、 对上面的几种方法进行总计比较,对他们的控制精度分 别进行分析比较; 三、 实验原理 1、 控制系统状态空间方程整体离散法的求解; 控制系统的传递函数一般为 x Ax Bu Y Cx Du ? =+=+ 有两种控制框图简化形式如下: KI 控制器可以用框图表示如下:
惯性环节表示如下: 高阶系统(s)(1)n K G T = +的框图如下 对于上面的框图可以简写传递函数 x Ax Bu Y Cx Du ? =+=+ 根据各环节间的关系可以列写出式子中出现的系数A 、B 、C 和D ,下面进行整体离散法求传递函数的推导
00 ()0 ...*()...()(t)(0)...*(t)(0)(t)(0)()(0)At At At At At t t At t t A AT t AT A At t t At At A At A t x Ax Bu e e x e Ax e Bu d e x dt Bue dt dt e x Bue dt e x x Bue d e x x e e Bue d x x e Bue d t KT x kT x e τ ττ τττττ ? -? -----------=+=+=?=?=+=+?=+==????? ?①①得②③ ③得令()0 (1)(1)[(1)]0 (1)[(1)]0 ...(1)[(1)](0)...*(1)()(1)T (1)()()() ,kT A kT A kT k T A k T A k T AT k T AT A k T kT T T AT At AT At AT Bue d t K T x k T x e Bue d e x k e x k Bue d k t x k e x k e Budt e x k e Bdt u k e ττττττ τ?-+?++-++-+=++=+-+-=+-=+=+=+?Φ=? ? ? ??④ 令⑤ ⑤④得令令0 (1)()(1) T At m m e Bdt x k x k x k Φ=+=Φ?+Φ?+?得 这样,如果知道系数,就可以知道高阶系统的传递函数和状态空间方程。 2、 在控制系统的每一个环节都加一个采样开关,构成分别 离散法求解系统的状态空间方程; 采样开关其实是一个零阶保持器
1.5.1 模拟通信系统性能指标 知识点归纳: 通信系统的主要性能指标通信系统的性能指标指涉及有效性、可靠性、标准性、经济性及可维护性等,但设计或评价通信系统的主要性能指标是传输信息的有效性和可靠性。有效性主要是指消息传输的“速度” ,而可靠性主要是指消息传输的“质量” 。 对于模拟通信系统来说,有效性可以用消息占用的有效带宽来度量,可靠性可以用接受端输出的信噪比来度量。对于数字通信系统来说,度量其有效性的主要性能指标是传输速率和频带利用率,可靠性主要指标是差错率。 数字系统的性能指标 有效性有效性时通信系统传输信息的数量上的表征,时指给定信道和时间内传输信息的多少。数字通信系统中的有效性通常用码元速率RB信息速率Rb和频带利用率衡量。 1.码元速率 码元速率RB也称为传码率、符号传输速率等定义:码元速率RB是指每秒钟传输码元的数目。单位:为波特(baud), 简记为B, 例如,某系统在 2 秒内共传送4800 个码元,则该系统的传码率为2400B 。 虽然数字信号由二进制和多进制的区分, 但码元速率与信号的进制无关, 只与一个码元占有时间Tb 有关, R B=1/Tb 。 2 . 信息速率 定义:信息速率(Rb)是指每秒传输的信息量。单位:比特/秒(bit/s ),简记(b/s) 例如,若某信源在 1 秒钟内传送1200 个符号,且每一个符号的平均信息量为l (bit ),则该信源的信息传输速率 =1200b/s 或1200bps 。对于传输二进制数字信号,则Rb 为二进制码元数目/秒,对于传输N 二进制数字信号,有Rb=RBlog2M 式中RB为M进制数字信号的码元速率。二进制时,码元速率与信息速率数值相等,只是单位不同。 3. 频带利用率在比较不同的数字通信系统的效率时,仅仅看他们的信息传输速率是不够的。因为即使是两个系统的信息传输的速率相同,他们所占用的频带宽度也可能不同。从而效率也不同。对于相同的信道频带,传输的信息量越来越高。所以用来衡量数字通信系统传输效率指标(有效性)应当是单位频带内的传输速率,即 n=符号传输速率/频带宽度(波特/赫) 对于二进制传输,则可以表示为 n=信息传输速率/频带宽度(比特/秒*.赫) 可靠性 可靠性是通信系统传输信息质量上的象征。指的是接收信息的准确程度。衡量数字通信系统可靠性的重要指标是错误率,具体地有误码率,具体地有误码率Pe和误信率Pb二种中表示方式 1 .误码率Pe 这个指标是多次统计结果的平均量,所以这里指的是平均误码率。例如:经长时间统计,平均传输1 0 0 0个 码元种错一个码元,则误码率Pe = 10 - 3 2. 误信率 显然在二进制种有Pe=Pb 错误率的大小由通路的系统特性和信道质量决定。而不同信号对错误了的要求为 10 - 3——10 - 6,而传输计算机的数据信息时常常要求更高,则Pb更小。当信道不能马民族要求时,必须家 纠错编码。最后需指出的是:可靠性和有效性指标是互相矛盾的和可以交换的,即可通过降低有效性的方法来提高 系统的可靠性,或反之.
微波培训 一、概述 1.微波通信是在微波频段,通过地面视距进行信息传播的一种无 线通信手段。所谓微波是指频率在300MHz至300GHz范围内的 电磁波! 2.微波不像无线电广播那样从一个点向许多地点发送信号,微波 通信是一个点到点的通信系统,当两点间直线距离内无障碍物 的时候就可以使用微波通信。 3.微波通信设备对于无线通信的基站的互联具有较好的适应性, 体积小、重量轻、安装容易。其室外单元和天线可直接安装于 无线基站的轻型铁塔上,使用十分简便。配置也比较灵活,工 作频段和发射功率可以很容易的调整,我们在现场根据现场的 需要来进行调整即可,通信容量和备份配置也是多种多样,可 供用户选择。 4.备份最常用的就是1+1。就是在一端的微波设备里有两个室内 单元,一个做主用,另外一个做备有,当主用的室内单元出现 故障,不能继续工作的时候,通信就会自动的切换到备用的室 内单元上进行,这样就不会中断通信,。 5.现在省内移动所使用最多的微波设备有3种,分别是地杰的 SUPER STAR、戴维斯的WaveLink PDH、爱立信的MINI LINK E!另外今年刚出现带有美化天线烽火科技的虹信微 波,这几种微波的基本组成结构是一样的,都是由天线、室 外单元、馈线、室内单元组成。 6.
戴维斯的WaveLink PDH是智能化中、短距离点对点PDH数字微波传输设备,频段是从7GHZ----38GHZ,容量为4/8/16 E1等类型。根据基站的需要,安装的IDU配置也不一样,有4个E1的,8个E1的,16个E1的,最常用的是8个E1的。戴维斯的WaveLink PDH具有全频段无损切换,前向误码纠错及自动功率增益控制等先进功能。 7.硬件组成 它们的硬件是由天线、软波导、室外单元(ODU)、馈线、避雷器、室内跳线、室内单元(IDU)组成。 (1)天线:也就是我们经常在塔上看到那个大锅,根据系统频率,传输距离,和系统的需求,可以被配置为不同直径的天线, 常用的有0.3m、0.6m、1.2m、2m等几种,当然还有更大的2.5m、3m的。天线还分为垂直极化和水平极化两种,电磁波垂直于地磁方向称为垂直极化,如果是水平于地磁方向的成为水平极化。一般多采用垂直极化,因为垂直极化的抗干扰能力要比水平极化的强。 (2)软波导:除了0.3m的天线不使用软波导采用硬连接以外,其余各型号的天线均使用软波导叫软连接,软波导就是起到一个连接天线和ODU的作用。 (3)室外单元( Out Door Unit:ODU ):微波的大部分功能都是由室外单元来完成的,通信的处理,微波容量的大小就是由ODU 来完成的,ODU里面的容量卡决定了这跳微波的容量,跟IDU上面的E1输出口数量是应该对应的,如果容量卡和IDU 对应不上就会出现E1不通的现象。
模拟通信就是在用户线上传输模拟信号的通信方式。 数字通信 是一种离散的、脉冲有无的组合形式,是负载数字信息的信号。最常见的数字信号是幅度取值只有两种(用0和1代表)的波形,称为“二进制信号”。“数字通信”是指用数字信号作为载体来传输信息,或者用数字信号对载波进行数字调制后再传输的通信方式。 随着超大规模集成电路工艺的成熟以及计算机和数字信号处理 技术的充分发展,数字通信发展迅速,大多数的模拟通信系统已被数字通信系统所取代。尽管在未来的一段时间内数字通信系统还不能完全取代模拟通信系统那个,但通信朝着数字化方向发展是不会改变的,这是由数字通信和模拟通信自身的特点所决定的。 两者的对比 数字通信与模拟通信相比,具有明显的优点: 首先是抗干扰、抗噪声能力强。模拟信号在传输过程中和叠加的噪声很难分离,噪声会随着信号被传输、放大、严重影响通信质量。比如说1用高电平来表示,0用低电平来表示。 一个模拟信号如果信号衰减20%的话,那就严重失真了。而一个高电平的信号衰减20%时,它还是代表1。因为数字通信是采用再生中继方式,能够消除噪音,再生的数字信号和原来的数字信号一样,
可继续传输下去,这样通信质量便不受距离的影响,可高质量地进行远距离通信。再有数字通信中的信息是包含在脉冲的有无之中的,只要噪声绝对值不超过某一门限值,接收端便可判别脉冲的有无,以保证通信的可靠性。其次,数字信号易于加密,信息传输比较安全。数字信号的特殊形式,使得信息加密变得十分容易。例如把信息比特率按一定的长度分组,用相同长度的一个比特率(称为密钥)与这些分组进行模二加,便完成了信息的加密。在接收端,用相同的密钥与接收到的序列模二加,就恢复为原来的信息序列。数字移动通信GSM 系统就是采用这方法对信息加密的。模拟信号虽然也可以加密,但操作起来要复杂得多。此外,数字通信设备的产品重复性好,有利于生产以及通信的发展和普及。 即使这样,与数字通信系统相比,模拟通信系统也有自己比较好的一面,设计较简单,电路的功率消耗一般比较低。 因此数字通信与模拟通信的区别具体说就是调制方式不同而已。模拟通信,技术很成熟,就是将模拟信号与载波进行调制,使其带有一定载波特性,又不失模拟信号的独特性,接受端通过低通滤波器,还原初始模拟信号。而数字信号,首先进行采样,对于采样幅值进行编码(0,1编码),然后进行调制,相移键控等,接受端还原即可,信号传输率高。相对而言,数字通信优于模拟通信。 从宏观看,世界通信方式,仍以电话为主,在电话通信中,则以程控交换和移动电话发展最快。目前模拟通信系统还在使用,但由于
通信原理课程设计 实验报告 专业:通信工程 届别:07 B班 学号:0715232022 姓名:吴林桂 指导老师:陈东华
数字通信系统设计 一、 实验要求: 信源书记先经过平方根升余弦基带成型滤波,成型滤波器参数自选,再经BPSK ,QPSK 或QAM 调制(调制方式任选),发射信号经AWGN 信道后解调匹配滤波后接收,信道编码可选(不做硬性要求),要求给出基带成型前后的时域波形和眼图,画出接收端匹配滤波后时域型号的波形,并在时间轴标出最佳采样点时刻。对传输系统进行误码率分析。 二、系统框图 三、实验原理: QAM 调制原理:在通信传渝领域中,为了使有限的带宽有更高的信息传输速率,负载更多的用户必须采用先进的调制技术,提高频谱利用率。QAM 就是一种频率利用率很高的调制技术。 t B t A t Y m m 00sin cos )(ωω+= 0≤t ≤Tb 式中 Tb 为码元宽度t 0cos ω为 同相信号或者I 信号; t 0s i n ω 为正交信号或者Q 信号; m m B A ,为分别为载波t 0cos ω,t 0sin ω的离散振幅; m 为 m A 和m B 的电平数,取值1 , 2 , . . . , M 。 m A = Dm*A ;m B = Em*A ; 式中A 是固定的振幅,与信号的平均功率有关,(dm ,em )表示调制信号矢量点在信号空
间上的坐标,有输入数据决定。 m A 和m B 确定QAM 信号在信号空间的坐标点。称这种抑制载波的双边带调制方式为 正交幅度调制。 图3.3.2 正交调幅法原理图 Pav=(A*A/M )*∑(dm*dm+em*em) m=(1,M) QAM 信号的解调可以采用相干解调,其原理图如图3.3.5所示。 图3.3.5 QAM 相干解调原理图 四、设计方案: (1)、生成一个随机二进制信号 (2)、二进制信号经过卷积编码后再产生格雷码映射的星座图 (3)、二进制转换成十进制后的信号 (4)、对该信号进行16-QAM 调制 (5)、通过升余弦脉冲成形滤波器滤波,同时产生传输信号 (6)、增加加性高斯白噪声,通过匹配滤波器对接受的信号滤波 (7)、对该信号进行16-QAM 解调 五、实验内容跟实验结果:
SDH 数字微波通信技术 摘要:SDH微波通信是新一代的数字微波传输体制。数字微波通信是用微波作为载体传送数字信息的一种通信手段。它兼有SDH数字通信和微波通信两者的优点,由于微波在空间直线传输的特点,故这种通信方式又称为视距数字微波中继通信。本文主要介绍SDH数字微波通信技术的组成、特点及应用。 一、SDH数字微波通信系统的组成 (1)数字微波传输线路的组成形式可以是一条主干线,中间有若干分支,也可以是一个枢纽站向若干方向分支。如图1所示是一条数字微波通信线路的示意图,其主干线可长达几千公里,另有若干条支线线路,除了线路两端的终端站外,还有大量中继站和分路站,构成一条数字微波中继通信线路。 组成此通信线路设备的连接方框图如图2所示。它分为以下几个部分: (2)用户终端,直接为用户所使用的终端设备,如自动电话机、电传机、计算机、调度电话等。 (3) 交换机。这是用于功能单元、信道或电路的暂时组合以保证所需通信动作的设备,用户可通过交换机进行呼叫连接,建立暂时的通信信道或电路。这种交换可以是模拟交换,也可以是数字交换。 (4) 数字电话终端复用设备(即数字终端机)。其基本功能是把来自交换机的多路信号变换为时分多路数字信号,送往数字微波传输信道,以及把数字微波传输信道收到的时分多路数字信号反变换为交换机所需的信号,送至交换机。 (5) 微波站。按工作性质不同,它可分成数字微波终端站、数字微波中继站和数字微波分路站。SDH微波终端站的发送端完成主信号的发信基带处理、调制、发信混频及发信功率放大等;终端站的收信端完成主信号的低噪声接收、解调、收信基带处理。终端站还具有备用倒换功能,包括倒换基准的识别,倒换指令的发送与接收,倒换动作的启动与证实等。 (6) 数字微波中继站。主要完成信号的双向接收和转发。有调制、解调设备的中
第一章 1.你对信息技术如何理解?信息时代的概念是什么? 答:信息技术是研究完成信息采集、加工、处理、传递、再生和控制的技术,是解放、扩展人的信息功能的技术。概念是信息技术为核心推动经济和社会形态发生重大变革。 2.NII GII的含义是什么? 答:NII国家信息基础结构行动计划。GII全球信息基础设施。 3.现代通信的基本特征是什么?它的核心是什么? 答:现代通信的基本特征是数字化,核心是计算机技术。 4.数字通信与模拟通信的主要区别是什么?试举例说明人们日常生活中的信息服务,哪些是模拟通信,哪些是数字通信。 答:模拟信号的电信号在时间上、瞬时值上是连续的,模拟信号技术简单,成本低,缺点是干扰严重,频带不宽、频带利用率不高、信号处理难、不易集成和设备庞大等。数字信号在时间,瞬时值上是离散的,编为1或0的脉冲信号。 5.数字通信的主要特点有哪些? 答:数字通信便于存储、处理;数字信号便于交换和传输;数字信号便于组成多路通信系统;便于组成数字网;数字化技术便于通信设备小型化、微型化;数字通信抗干扰性强,噪声不积累。 6.为什么说数字通信抗干扰性强?噪声不积累? 答:在模拟通信中,由于传输的信号是模拟信号,因此
很难把噪声干扰分开而去掉,随着传输距离的增加,信号的传输质量会越来越恶化。在数字通信中,传输的是脉冲信号,这些信号在传输过程中,也同样会有能量损失,受到噪声干扰,当信噪比还未恶化到一定程度时,可在适当距离或信号终端经过再生的方法,使之恢复原来的脉冲信号,消除干扰和噪声积累,就可以实现长距离高质量的通信。 7.你对网络全球化如何理解?它对人类生活将带来什么样的影响? 答:我认为网络全球化是以内特网为全球范围的公共网,用户数量与日俱增,全球各大网络公司抢占内特网网络资源,各国政府高度重视,投资研发的网络,全球网络化的发展趋势是即能实现各国国情的应用服务,又能实现突破地区、国家界限的世界服务,使世界越来越小。 8.什么是现代通信?它与信息网关系如何? 答:现代通信就是数字通信系统与计算机融合,实现信源到信宿之间完成数字信号处理、传输和交换全过程。 信息网是多种通信系统综合应用的产物,信息网源于通信系统,但高于通信系统,通信系统是各种网不可缺少的物质基础。通信系统可以独立地存在并组成网络,而通信网不可能离开系统而单独存在。 9.信息网的网络拓扑结构有哪几种类型,各自有何特点? 答:有星型网,以一中点向四周辐射,现在的程控交换局与其所在的各电话用户的连线就是这种结构。
实验一 带通信号和低通等效信号 实验目的:对带通信号及其低通等效信号进行分析和仿真。 实验内容: 1、参考教材P24面例子,考虑如下带通信号,编写仿真程序实现, 得出仿真结果。 (1) 画出该信号和它的幅度谱; (2) 求出该信号的解析信号,并画出它的幅度谱; (3) 求出并画出该信号的包络; (4) 分别假设和 ,求该信号的低通等效,并画出它的幅度谱。 2、设带通信号为: 通过Matlab编程仿真实现: (1) 画出该信号和他的谱函数(包括幅度和相位) (2) 确定并画出解析信号的谱函数(包括幅度和相位) (3) 画出该信号的包络。 (步骤一,二中,设采样间隔为ts=0.002s)。
实验二 滤波器的设计和仿真实现 实验目的:各种滤波器的设计与仿真实现。 实验内容: 1、试设计一个模拟低通滤波器,fp=3500Hz,fs=4500Hz,αp=3 dB,αs=25dB。分别用巴特沃斯和椭圆滤波器原型,求出其3dB截止频率和滤波器阶数,传递函数,并作出幅频、相频特性曲线。 2、试设计一个巴特沃斯型数字低通滤波器,设采样率为8000Hz, fp=2100Hz,fs=2500Hz,αp=3dB,αs=25dB。并作出幅频、相频特性曲线。 3、试设计一个切比雪夫1型高通数字滤波器,采样率为8000Hz, fp=1000Hz,fs=700Hz,αp=3dB,αs=20dB。并作出幅频、相频特性曲线。 4、试设计一个椭圆型带通数字滤波器。设采样率为10000Hz,fp= [1000,1500] Hz,fs=[600,1900] Hz,αp=3dB,αs=20dB。并作出幅频、相频特性曲线。 5、试设计一个切比雪夫2型带阻数字滤波器。设采样率为10000Hz,fp= [1000,1500] Hz,fs=[1200,1300] Hz,αp=3dB,αs=20dB。并作出幅频、相频特性曲线。 6、在采样率为8000Hz下设计一个在500Hz,1000Hz,1500Hz, 2000Hz,...,n*500Hz的地方开槽陷波。陷波带宽(-3dB 处)为60Hz。试设计该滤波器。 7、用Matlab设计具有下列指标的线性相位FIR带通滤波器:阻带截止频率为0.45π和0.8π,通带截止频率为0.55π和0.7π,最大通带衰减为0.15dB,最小阻带衰减为40dB。分别用下面的窗函数来设计滤波器:海明窗、汉宁窗、布莱克曼窗和凯泽窗。对于每种情况,显示其冲激响应系数并画出设计的滤波器增益响应。分析设计结果。
《控制系统数字仿真》课程 大作业 姓名: 学号: 班级: 日期: 同组人员:
目录 一、引言 (2) 二、设计方法 (2) 1、系统数学模型 (2) 2、系统性能指标 (4) 2.1 绘制系统阶跃响应曲线、根轨迹图、频率特性 (4) 2.2 稳定性分析 (6) 2.3 性能指标分析 (6) 3、控制器设计 (6) 三、深入探讨 (9) 1、比例-微分控制器(PD) (9) 2、比例-积分控制(PI) (12) 3、比例-微分-积分控制器(PID) (14) 四、设计总结 (17) 五、心得体会 (18) 六、参考文献 (18)
一、引言 MATLAB语言是当今国际控制界最为流行的控制系统计算机辅助设计语言,它的出现为控制系统的计算机辅助分析和设计带来了全新的手段。其中图形交互式的模型输入计算机仿真环境SIMULINK,为MATLAB应用的进一步推广起到了积极的推动作用。现在,MATLAB语言已经风靡全世界,成为控制系统CAD领域最普及、也是最受欢迎的软件环境。 随着计算机技术的发展和应用,自动控制理论和技术在宇航、机器人控制、导弹制导及核动力等高新技术领域中的应用也愈来愈深入广泛。不仅如此,自动控制技术的应用范围现在已发展到生物、医学、环境、经济管理和其它许多社会领域中,成为现代社会生活中不可或缺的一部分。随着时代进步和人们生活水平的提高,在人类探知未来,认识和改造自然,建设高度文明和发达社会的活动中,控制理论和技术必将进一步发挥更加重要的作用。作为一个自动化专业的学生,了解和掌握自动控制的有关知识是十分必要的。 利用MATLAB软件及其SIMULINK仿真工具来实现对自动控制系统建模、分析与设计、仿真,能够直观、快速地分析系统的动态性能和稳态性能,并且能够灵活的改变系统的结构和参数,通过快速、直观的仿真达到系统的优化设计,以满足特定的设计指标。 二、设计方法 1、系统数学模型 美国卡耐尔基-梅隆大学机器人研究所开发研制了一套用于星际探索的系统,其目标机器人是一个六足步行机器人,如图(a)所示。该机器人单足控制系统结构图如图(b)所示。 要求: (1)建立系统数学模型; (2)绘制系统阶跃响应曲线、根轨迹图、频率特性; (3)分析系统的稳定性,及性能指标; (4)设计控制器Gc(s),使系统指标满足:ts<10s,ess=0,,超调量小于5%。
通信系统仿真实验 一、实验目的 1、采用不同调制(QPSK 和8PSK )时系统的误码率和误比特率性能仿真对比; 2、仿真研究信道编码对通信系统性能的影响; 3、信道编码对通信系统性能的影响,删余卷积码的Pb 性能(不同生成元,不同删余码,软硬判决)。 二、实验环境 Matlab 三、实验原理 1、实验(一) QPSK 和8PSK 的理论误码率以及误比特率公式: 采用Matlab 中自带函数pskdemod ,pskdemod 调制解调,信道为高斯白噪信道,采取自带函数awgn 加噪。以及biterr 和symerr 统计误比特率和误码率曲线; 2、实验(二) 1)对实验(一)所搭建的通信系统采用生成元为[171,133]的 [2,1,6]非系统码进行卷积编码。并采用硬判决和软判决,比较不同判24811[1] , (sin )228 e e r P erfc P erfc r π=--≈ 1/b 21(1),log k P Pe k M =--=
决方式下的误比特率性能 2)加入删余码的卷积编码。删余码是对对原卷积码有规律地删除一定数量码元符号,减少发送的比特数。如将1/2码率的卷积删成3/4码率的卷积码在译码时在删掉的位补零。分别用convenc函数编码、vitdec函数和译码。译码采用软判决,软判决则将波形进行多电平量化,再送往译码器。最后用biterr函数统计误比特率,比较不同删余图样下的误比特率性能; 3)采用第三代移动通信中用于话音业务的生成元为[561,753]的[2,1,8]非系统卷积码及其软判决译码。比较1)中的误比特率性能。 四、实验结果 1、QPSK和8PSK的误码率与误比特率性能比较(如下图所示), 图1 误码率性能曲线 由图1可知,QPSK的误码率低于8PSK,其调制性能也优于8PSK,并且仿真次数达到50次,结果显示已经接近理想曲
SDH数字微波通信系统 摘要:SDH数字微波通信是新一代的数字微波传输体制。它兼有SDH数字通信和微 波通信两者的优点,本文简单介绍了SDH的速率和帧结构,阐明了SDH数字微波传输设备采用的关键技术以及SDH数字微波通信系统的组成。 关键字:SDH 微波通信数字 ABSTRACT:SDH digital microwave communication is the new generation of digital microwave transmission system. It both SDH digital communications and microwave communication advantage of the two, this article simply introduces the rate and frame structure SDH, expounds SDH digital microwave transmission equipment the key technologies used and SDH digital microwave communication system composition. Keywords:SDH digital microwave communication 1.SDH简介 SDH是新一代的数字传输体制。SDH有全世界统一的数字信号和帧结构标准,它把北美、日本和欧洲、中国流行的两大准同步数字体系(三个地区性标准)在STM—l等级上获得统一第一次实现了数字传输体制上的世界睦标准,因采用了同步复用方式和灵活的复用映射结构,避免对整个高速复用信号分解,达到一步复用特性,使上、下业务十分容易,也大大简化了数字交叉连接设备(DXC);SDH帧结构中安排了丰富的开销比特,大大加强了网络的运行管理和维护能力;不同厂家的产品可以互通,降低了联网成本。毫无疑问,传输网的发展方向应该是高度灵活和规范化的SDH网。SDH不仅可以应用于光纤通信系统中,而且还可以运用于微波通信系统之中,从而可以建立一个全新的SDH数字微波通信网络。 1、SDH的比特速率 同步数字体系最基本的模块信号(即同步传送模块)是STM—l,其比特速率为155.520Mbit /s,更高级的STM-N信号可以按字节同步复接获得,其fbN=(155.520*N)Mbit/s,目前SDH只能支持一定的N值,即N为l、4、16、64等。 S rM—l l55.520Mbit/s STM-4 622.080Mbit/s sTM一16 2488.320Mbit/s STM一64 9953.280Mbit/s 2、s1M一1的帧结构 STM—l的帧结构为净负荷区域、段开销区域和管理单元指针区域组成。以矩阵结构表达,共为9行270列(字节),帧长125us。SOH较为复杂,已经包含了定帧信息、公务、段误码监测、自动备用倒换、段数据通信等信息。