Distributed Clocks Feature
1. Distributed Clocks Feature
Distributed Clocks (DC) feature in the EtherCAT? has been introduced to perform synchronization
of the master and all slave devices in the bus.
In general it works in the following way: when the feature is enabled, the master or a first DC-capable slave in the network is configured to become a reference clock. Then the time of the reference clock is propagated along the network to all slaves through the EtherCAT master.
1.1. DC slave as a reference clock
When the first DC slave is used as a reference clock, the EtherCAT Master sends ARMW in cycles
to read the bus time from the appropriate register of the clock master and write this value in the corresponding registers of the rest DC slaves.
as a reference clock
master
1.2. EtherCAT
In this case the master sends the BRW command in order to propagate its local time among
the corresponding DC slaves. Update of local times in the DC-capable slaves is performed with
a controller integrated in their ESC (EtherCAT Slave Controller).
In both cases it is necessary to compensate delays in transporting the EtherCAT frames emerging between particular slaves, so as to keep up with the requested accuracy that may range even
below 1us for the slaves clocks. It is provided in the following way: for each slave the time between the frame departure and frame arrival is measured at each connected port. Then the master computes the delays between the slaves and writes the corresponding compensation values into
the appropriated register of the ESC.
The ESC controller's DC unit provides two digital output signals, SYNC0 and SYNC1.
Based on the bus time, these SYNC pulses, whose frequency generally corresponds to the EtherCAT
bus clock, are generated. For example, if the EtherCAT master sends the cyclical I/O data at a 500 us rate, as a rule the SYNC pulse frequency will be set to 2 kHz. On the one hand, these SYNC signals are available as a digital output signal (e.g. to activate the slave hardware components) on the slave side and, on the other hand, as an interrupt source for the slave software.
Document version 1.0Page 1 of 3
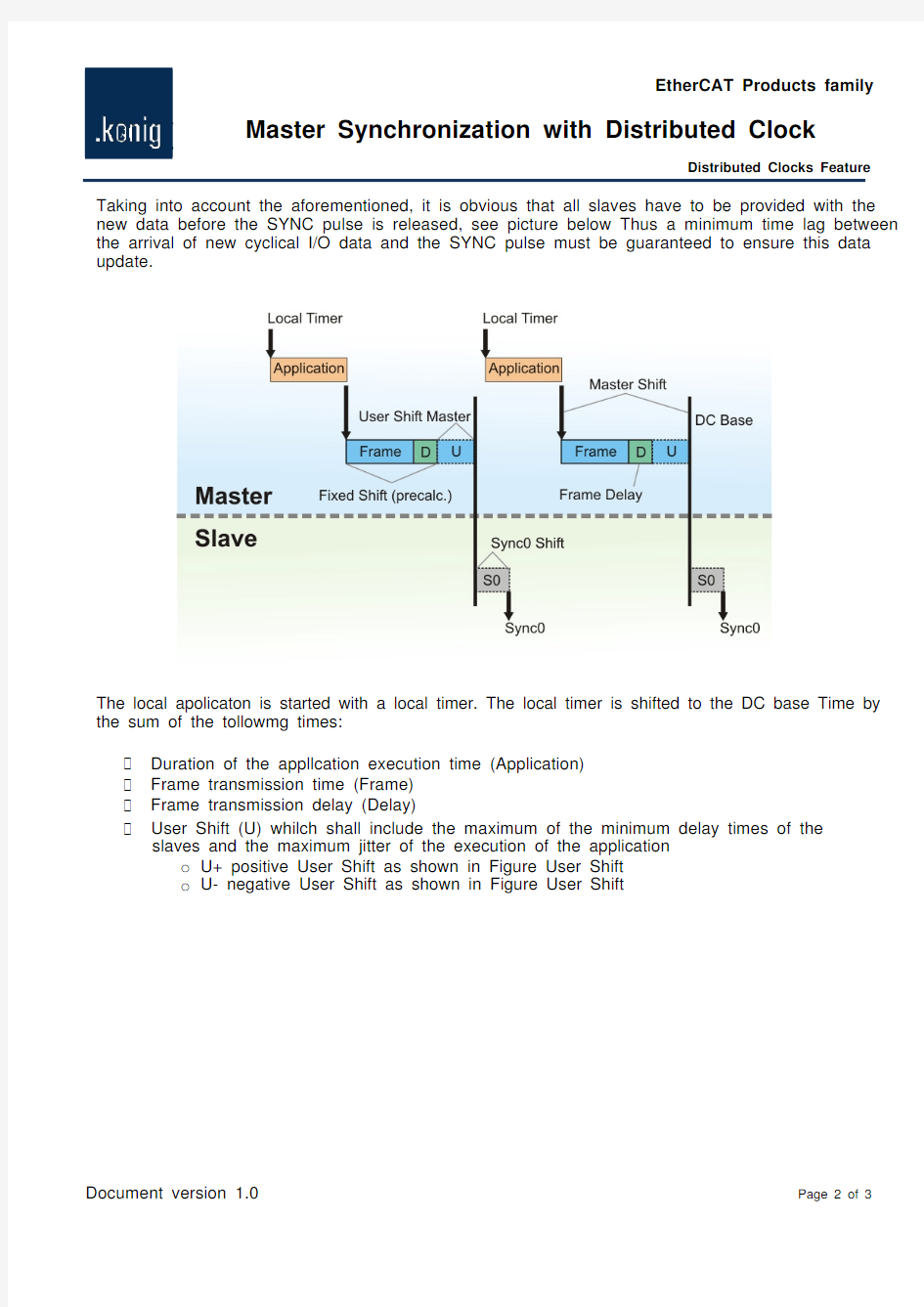
Distributed Clocks Feature Taking into account the aforementioned, it is obvious that all slaves have to be provided with the
new data before the SYNC pulse is released, see picture below Thus a minimum time lag between the arrival of new cyclical I/O data and the SYNC pulse must be guaranteed to ensure this data update.
The local apolicaton is started with a local timer. The local timer is shifted to the DC base Time by the sum of the tollowmg times:
Duration of the appllcation execution time (Application)
Frame transmission time (Frame)
Frame transmission delay (Delay)
User Shift (U) whilch shall include the maximum of the minimum delay times of the
slaves and the maximum jitter of the execution of the application
o U+ positive User Shift as shown in Figure User Shift
o U- negative User Shift as shown in Figure User Shift
Document version 1.0Page 2 of 3
Master Synchronization 2. Master Synchronization
The EtherCAT master stack sends its cyclic I/O data in accordance with a local timer in the controller hardware (e.g. Programmable Interval Timer (PIT) or Advanced Programmable Interrupt Controller (APIC) timer). Should the system run in a 2kHz cycle, the local timer and the slave
timer,that is responsible to generate the SYNC pulses, are set to 2kHz. In fact the local timer and the slave timers will not run at an exact cycle rate producing a drift among these timers. Consequently, a constant interval between sending the cyclic I/O data in the master and
generation of the SYNC pulses in the slaves is impossible. In this case to enable control over the interval with a constant value the EtherCAT master either has to synchronize its local timer with
the clock in the first DC-capable slave which is set as a reference clock or synchronize the clocks
in all DC-capable slaves with its local timer.
The Master Synchronization is supported by the KPA EtherCAT Master and can be employed in
two ways:
1. the local timer (e.g. the PIT or APIC-timer) is re-adjusted from the Master side (The first
DC slave is a reference clock)
2. the bus time is re-adjusted in accordance with the Master’s local timer (Master is a
reference clock).
When the first option is used, the EtherCAT master cyclically calculates the difference between the EtherCAT master time and the DC clock master time. The re-adjustment value is rated with a PI controller algorithm in accordance with the set value (the distance from the SYNC pulse to the
timer-interrupt in the master).
For the second option the Master cyclically propagates the local time by mean of BWR command. Distributed Clock feature is included to KPA EtherCAT Master Standard and Premium versions.
Document version 1.0Page 3 of 3
1引言 以太网技术由于其开放性好、价格低廉和使用方便等特点,已经广泛应用于电信级别的网络中,以太网的数据传输速度也从早期的10M提高到100M,GE,10GE。40GE,100GE正式产品也将于2009年推出。 以太网技术是“即插即用”的,也就是将以太网终端接到IP网络上就可以随时使用其提供的业务。但是,只有“同步的”的IP网络才是一个真正的电信级网络,才能够为IP网络传送各种实时业务与数据业务的多重播放业务提供保障。目前,电信级网络对时间同步要求十分严格,对于一个全国范围的IP网络来说,骨干网络时延一般要求控制在50ms之内,现行的互联网网络时间协议NTP (NetworkTimeProtocol),简单网络时间协议SNTP(SimpleNetwork Time Protocol)等不能达到所要求的同步精度或收敛速度。基于以太网的时分复用通道仿真技术(TDM over Ethernet)作为一种过渡技术,具有一定的以太网时钟同步概念,可以部分解决现有终端设备用于以太网的无缝连接问题。IEEE 1588标准则特别适合于以太网,可以在一个地域分散的IP网络中实现微秒级高精度的时钟同步。本文重点介绍IEEE 1588技术及其测试实现。 2IEEE1588PTP介绍 IEEE1588PTP协议借鉴了NTP技术,具有容易配置、快速收敛以及对网络带宽和资源消耗少等特点。IEEE1588标准的全称是“网络测量和控制系统的精密时钟同步协议标准(IEEE1588Precision Clock Synchronization Protocol)”,简称PTP(Precision Timing Protocol),它的主要原理是通过一个同步信号周期性的对网络中所有节点的时钟进行校正同步,可以使基于以太网的分布式系统达到精确同步,IEEE 1588PTP时钟同步技术也可以应用于任何组播网络中。 IEEE1588将整个网络内的时钟分为两种,即普通时钟(OrdinaryClock,OC)和边界时钟(BoundaryClock,BC),只有一个PTP通信端口的时钟是普通时钟,有一个以上PTP通信端口的时钟是边界时钟,每个PTP端口提供独立的PTP通信。其中,边界时钟通常用在确定性较差的网络设备(如交换机和路由器)上。从通信关系上又可把时钟分为主时钟和从时钟,理论上任何时钟都能实现主时钟和从时钟的功能,但一个PTP通信子网内只能有一个主时钟。整个系统中的最优时钟为最高级时钟GMC(Grandmaster Clock),有着最好的稳定性、精确性、确定性等。根据各节点上时钟的精度和级别以及UTC(通用协调时间)的可追溯性等特性,由最佳主时钟算法(Best Master Clock)来自动选择各子网内的主时钟;在只有一个子网的系统中,主时钟就是最高级时钟GMC。每个系统只有一个GMC,且每个子网内只有一个主时钟,从时钟与主时钟保持同步。图1所示的是一个典型的主时钟、从时钟关系示意。
丹阳市人民医院胸痛中心的时间管理方案 一、时钟同步系统 时钟同步系统对于医院系统可以说是一个不可缺少的重要组成部分,其主要作用是为相关医医疗机构工作人员提供一个标准统一的时间信息,同时为各相关单位科室提供统一的标准时间系统同步,从而实现各相关单位及相关设备的时间标准统一。这对医院的服务质量起到了重要的作用。时钟同步系统工作原理是相关责任人手持移动终端接收3G基站时间信息来实现统一;所有相关设备均以此为标准校对,从而实现全系统统一的时间标准。并每周校对一次。 二、计时点及方法 1.发病时间:患者出现胸痛、胸闷、上腹不适等系列症状开始的时间 ·计时方法:主要是通过问诊方式获得 2.呼救时间:首次拨打120呼救或拨打医院急救电话求救 ·计时方法:120记录、本院胸痛中心记录或其他急救机构记录,已接听电话的时刻为准。 3.到达现场时间:院前急救人员、社区医生或其他医疗机构到达现场时间 计时方法:要求院前人员、网络医院、其他医疗机构准确计时 4.首份心电图时间:完成第一份12或18导联心电图的时间 计时方法:开始接触医疗人员到完成第一份心电图最后一个导联记录为准。在完成心电图操作后,应将准确时间记录在心电图上,包括年、月、日、时、分5.确诊STEMl时问:完成首份心电图后,由受过胸痛专科培训的医生或分诊护士确认为STEMI时间;或由我院医师使用胸痛中心微信群诊断为STEMI的时间。 6.抽血时间:首次抽血查Tnl、CKMB等的时间 计时方法:以抽血护士完成标本采集时刻为计时点。 7.开始转运时间:在确诊为ACS并离开现场/医院的时间。 . 计时方法:由转运医护人员在接到病人启动车辆时计时 8. 给药时间:在确定为ACS患者,排除各类用药禁忌症后,给予服用肠溶阿司
时钟系统 技术方案 烟台北极星高基时间同步技术有限公司 2012 年 3 月 第一部分:时钟系统技术方案 一、时钟系统概述 1. 1 概述 根据办公楼的实际情况,特制定如下施工设计方案: 时钟系统主要由GPS接收装置、中心母钟、二级母钟(中继器)、全功能数 字显示子钟、、传输通道和监测系统计算机组成。 系统中心母钟设在中心机房内,其他楼各设备间设置二级母钟,在各有关场所安装全功能数字显示子钟。 系统中心母钟接收来自GPS的标准时间信号,通过传输通道传给二级母钟,由 二级母钟按标准时间信号指挥子钟统一显示时间;系统中心母钟还通过传输系统将标准时间信号直接传给各个子钟,为楼宇工作人员提供统一的标准时间 二、时钟系统功能 根据本工程对时钟系统的要求,时钟系统的功能规格如下: 时钟系统由GPS校时接收装置(含防雷保护器)、中心母钟、扩容接口箱、二级 母钟、数字式子钟、监控终端(也称监测系统计算机)及传输通道构成。其主要功
能为: 。显示统一的标准时间信息。 。向其它需要统一时间的系统及通信各子系统网管终端提供标准时间信息。 2.1 中心母钟 系统中心母钟设置在控制中心设备室内,主要功能是作为基础主时钟,自动接 收GPS勺标准时间信号,将自身的精度校准,并分配精确时间信号给子钟,二级母钟和其它需要标准时间的设备,并且通过监控计算机对时钟系统的主要设备进行监控。 中心母钟主要由以下几部分组成: 。标准时间信号接收单元 。主备母钟(信号处理单元) 。分路输出接口箱 。电源 中心母钟外观示意图见(附图) 2.1.1 标准时间信号接收单元 标准时间信号接收单元是为了向时间系统提供高精度的时间基准而设置的,用以实现时间系统的无累积误差运行。 在正常情况下,标准时间信号接收单元接收来自GPS的卫星时标信号,经解码、 比对后,经由RS422接口传输给系统中心母钟,以实现对母钟精度的校准。
附件4 甘肃电网智能调度技术支持系统 时间同步系统在线监测 技术改造(设备大修)项目 可行性研究报告模板项目名称: 项目单位: 编制: 审核: 批准: 编制单位: 设计、勘测证书号:
年月日
1.总论 时间同步系统在线监测功能,将时钟、被授时设备构成闭环,使对时状态可监测,且监测结果可上送,从而将时间同步系统纳入自动化监控系统管理。时间同步系统在线监测的数据来源分为两大类:设备状态自检数据和对时状态测量数据。设备状态自检主要是被监测设备自身基于可预见故障设置的策略,快速侦测自身的故障点。对时状态测量则是从被监测设备外部对其自身不可预见的故障产生的结果进行侦测,这两种方法较为完整的保证了时间同步系统监测的性能和可靠性。 1.1设计依据 2013年4月,国调中心专门下发了〔2013〕82号文《国调中心关于加强电力系统时间同步运行管理工作的通知》 1.2主要设计原则 通过在原系统上建立一套通讯技术及软件来实现系统级的时间同步状态在线监测功能。采用低建设成本、低管理成本、低技术风险的手段,解决当前自动化系统时间同步体系处于开环状态,缺乏反馈,无法获知工作状态紧迫现状,使时钟和被对时设备形成闭环监测,减少因对时错误引起的事件顺序记录无效,甚至导致设备死机等运行事故,并在此前提下尽可能的提高监测性能,减少复杂度。
1.3设计水平年 系统模块使用年限10年。 1.4设计范围及建设规模 智能调度技术支持系统(主站)针对时钟同步检测功能修改主要涉及前置应用,前置应用以104 或476 规约与变电站自动化系进行过乒乓原理对时,根据对时结果来检测各变电站时钟对时的准确性,从而保证全网时钟同步的准确性。同时,以告警直传方式接收变电站时间同步监测结果,包含设备状态自检数据和对时状态测量数据。 1.5主要技术经济指标 1.6经济分析 2.项目必要性 2.1工程概况 智能电网调度技术支持系统及各变电站都以天文时钟作为自己的时间源,正常情况下实现了全网时间的一致。 2.2存在主要问题 近期,电力系统时间同步装置在运行中发现的时钟异常跳变、时钟源切换策略不合理及电磁干扰环境下性能下降等问题,反映出电力系统时间同步在运行管理、技术性能、检验检测管理、在线监测手段及相关标准等方面仍需进一步完善和加强。
《单片机原理及接口》 课程设计报告 题目:时钟系统设计 专业名称:电子信息工程 班级: 092 学号: 910706220 姓名: 2011年 12月
时钟系统设计 陈 (电子信息工程学系) 中文摘要:本设计基于单片机仿真技术,以单片机芯片AT89C52作为核心控制器,通过硬件电路的制作以及软件程序的编制,设计制作出一个多功能数字时钟系统。单片机扩展的LCD显示器用来显示秒、分、时计数单元中的值。整个设计包括两大部分:硬件部分和软件部分,以单片机为核心,蜂鸣器,数码管,晶体管等为外围器件,设计一个正常走时,报时、初始化、闹钟的数字时钟。 关键词:单片机;数字时钟;AT89C52;闹钟 1、设计目标 设计一时钟系统,系统具有时钟功能,能准确显示时、分、秒,系统还应具有校正功能:能够修改当前的时间。 2、设计环境 Windows7 Keil uVision3 Proteus7.5 3、系统硬件设计 3.1单片机控制系统: 本设计基于单片机技术原理,以单片机芯片AT89C52作为核心控制器,通过硬件电路的制作 以及软件程序的编制,利用单片机的控制作用通过LCD来直接时、分、秒,并能对其分别进行设 置、修改;利用对蜂鸣器的控制来实现闹钟功能。同时使用C语言程序来控制整个时钟显示,使 得编程变得更容易,这样通过三个模块:键盘、芯片、显示屏即可满足设计要求。 3.2各部分功能实现: 单片机采用52系列单片机。由ATMEL公司生产的AT89S52是一种低功耗、高性能CMOS8位微控 制器,具有8K在系统可编程Flash存储器。使用Atmel公司高密度非易失性存储器技术制造,与工 业80C51产品指令和引脚完全兼容。在单芯片上,拥有灵巧的8位CPU和在线系统可编程Flash,使 得AT89S52为众多嵌入式控制应用系统提供高灵活、有效的解决方案。AT89S52具有以下标准功能: 8K字节Flash,256字节RAM,32位I/O口线,2个数据指针,三个16位定时器/计数器,一个6向量2 级中断结构,全双工串行口,片内晶振及时钟电路。空闲模式下,CPU停止工作,允许RAM、定时 器/计数器、串口、中断继续工作。掉电保护方式下,RAM内容被保存,振荡器被冻结,单片机一 切工作停止,直到下一个中断或硬件复位为止。而且,它还具有一个看门狗(WDT)定时/计数器, 如果程序没有正常工作,就会强制整个系统复位,还可以在程序陷入死循环的时候,让单片机复
前言 随着计算机和网络通信技术的飞速发展,火电厂热工自动化系统数字化、网络化的时代已经到来。这一方面为各控制和信息系统之间的数据交换、分析和应用提供了更好的平台、另一方面对各种实时和历史数据时间标签的准确性也提出了更高的要求。 使用价格并不昂贵的GPS时钟来统一全厂各种系统的时钟,已是目前火电厂设计中采用的标准做法。电厂内的机组分散控制系统(DCS)、辅助系统可编程控制器(PLC)、厂级监控信息系统(SIS)、电厂管理信息系统(MIS)等的主时钟通过合适的GPS时钟信号接口,得到标准的TOD(年月日时分秒)时间,然后按各自的时钟同步机制,将系统内的从时钟偏差限定在足够小的范围内,从而达到全厂的时钟同步。 一、GPS时钟及输出 1.1 GPS时钟 全球定位系统(Global Positioning System,GPS)由一组美国国防部在1978年开始陆续发射的卫星所组成,共有24颗卫星运行在6个地心轨道平面内,根据时间和地点,地球上可见的卫星数量一直在4颗至11颗之间变化。 GPS时钟是一种接受GPS卫星发射的低功率无线电信号,通过计算得出GPS时间的接受装置。为获得准确的GPS时间,GPS时钟必须先接受到至少4颗GPS 卫星的信号,计算出自己所在的三维位置。在已经得出具体位置后,GPS时钟只要接受到1颗GPS卫星信号就能保证时钟的走时准确性。 作为火电厂的标准时钟,我们对GPS时钟的基本要求是:至少能同时跟踪8颗
卫星,有尽可能短的冷、热启动时间,配有后备电池,有高精度、可灵活配置的时钟输出信号。 1.2 GPS时钟信号输出 目前,电厂用到的GPS时钟输出信号主要有以下三种类型: 1.2.1 1PPS/1PPM输出 此格式时间信号每秒或每分时输出一个脉冲。显然,时钟脉冲输出不含具体时间信息。 1.2.2 IRIG-B输出 IRIG(美国the Inter-Range Instrumentation Group)共有A、B、D、E、G、H几种编码标准(IRIG Standard 200-98)。其中在时钟同步应用中使用最多的是IRIG-B编码,有bc电平偏移(DC码)、1kHz正弦载波调幅(AC码)等格式。IRIG-B 信号每秒输出一帧(1fps),每帧长为一秒。一帧共有100个码元(100pps),每个码元宽10ms,由不同正脉冲宽度的码元来代表二进制0、1和位置标志位(P),见图1.2.2-1。 为便于理解,图1.2.2-2给出了某个IRIG-B时间帧的输出例子。其中的秒、分、时、天(自当年1月1日起天数)用BCD码表示,控制功能码(Control Functions,CF)和标准二进制当天秒数码(Straight Binary Seconds Time of Day,SBS)则以一串二进制“0”填充(CF和SBS可选用,本例未采用)。 1.2.3 RS-232/RS-422/RS-485输出 此时钟输出通过EIA标准串行接口发送一串以ASCII码表示的日期和时间报文,每秒输出一次。时间报文中可插入奇偶校验、时钟状态、诊断信息等。此输出目前无标准格式,下图为一个用17个字节发送标准时间的实例:
XP系统时间同步不成功_Windows time服务无法启动解决 同步时间的服务器是:210.72.145.44 xp自带的时间同步服务器老是会连不上,而且时间还会差一秒。 这里就教大家换成中科院国家授时中心的服务器,同步就方便多了。 1.双击右下角的时间。 2.把服务器改成210.72.145.44 3.按同步就可以了,一般不会出错。即使是高峰时期,三次之内闭成功,比美国的服务器好多了。 另外系统默认的时间同步间隔只是7天,我们无法自由选择,使得这个功能在灵活性方面大打折扣。其实,我们也可以通过修改注册表来手动修改它的自动同步间隔。 1. 在“开始”菜单→“运行”项下输入“Regedit”进入注册表编辑器 2. 展开[HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Services\W32Time\TimeProviders\Nt pClient ] 分支,并双击SpecialPollInterval 键值,将对话框中的“基数栏”选择到“十进制”上 3. 而这时在对话框中显示的数字正是自动对时的间隔(以秒为单位),比如默认的604800就是由7(天)×24(时)×60(分)×60(秒)计算来的,看明白了吧,如果您想让XP以多长时间自动对时,只要按这个公式算出具体的秒数,再填进去就好了。比如我填了3天,就是259200。 Windows time服务用于和Internet同步系统时间,如果时间无法同步有可能是服务没有随系统启动,可以在运行处输入"services.msc"打开服务控制台,找到"windows time"服务设置为自动并启动即可。 如果启动该服务时提示: 错误1058:无法启动服务,原因可能是已被禁用与其相关联的设备没有启动。 原因是windows time服务失效。 修复: 1.运行cmd 进入命令行,然后键入 w32tm /register 正确的响应为:W32Time 成功注册。 如果提示w32tm命令不内部或外部命令……,是因为系统盘下的system32目录不存在w32tm.exe和w32time.dll这两个文件,到网上下载一个或者到其他电脑复制过来放下这个目录下再运行 2.如果上一步正确,在cmd命令行或运行里用net start "windows time" 或net start w32time 启动服务。 如果无法启动Windows Time服务,同时提示:系统提示“错误1083:配置成在该可执行
华东电网时间同步系统技术规范 Technical Specification for Time Synchronism System of EastChina Electric Power Network 前言 华东电网已初步建成以超高压输电、大机组和自动化为主要特征的现代化大电网。它的运行实行分层控制,设备的运行往往要靠数百公里外的调度员指挥;电网运行瞬息万变,发生事故后更要及时处理,这些都需要统一的时间基准。为保证电网安全、经济运行,各种以计算机技术和通信技术为基础的自动化装置广泛应用,如调度自动化系统、故障录波器、微机继电保护装置、事件顺序记录装置、变电站计算机监控系统、火电厂机组自动控制系统、雷电定位系统等等。这些装置的正常工作和作用的发挥,同样离不开统一的全网时间基准。 自动化装置内部都带有实时时钟,其固有误差难以避免,随着运行时间的增加,积累误差越来越大,会失去正确的时间计量作用,因此,如何对实时时钟实现时间同步,达到全网的时间统一,长期来一直是电力系统追求的目标。目前,这些装置内部的实时时钟一般都带有时间同步接口,可以由某一种与外部输入的时间基准同步或自带高稳定时间基准的标准时钟源,如GPS标准时间同步钟对其实现时间同步,这为建立时间同步系统,实现时间统一,提供了基础。有越来越多的单位已经建立或将要建立这样的时间同步系统。为了规范、指导时间同步系统的管理、设计、安装、测试和运行,特制订《华东电网时间同步系统技术规范》(以下简称《规范》)。 本《规范》根据国内外涉及时间、时间统一技术的有关标准、建议、规范或规约,结合华东电网“统一时钟系统技术研究”的实践和有关时间同步的具体情况制订的。本《规范》的贯彻、实施,对提高华东电网全网时间统一准确度和改进系统运行、管理质量将起推动作用。 本标准由国家电力公司华东公司提出。 本标准由国家电力公司华东公司归口。 本标准由国家电力公司华东公司生产科技部负责起草并解释。 本标准主要起草人:朱缵震陈洪卿宋金安
全厂网络时钟同步方案 陈银桃,陆卫军,张清,章维 浙江中控技术股份有限公司,浙江杭州,310053 摘要:当前工控领域石化项目如乙烯、炼油日益趋向大型化、一体化和智能化。一个大型石化项目往往集成多套独立系统如DCS、SIS、CCS等,同时要求所有系统使用同一套网络时钟同步系统。本文提供了几种全厂网络时间同步方案,并分析了每个方案的优缺点和适用场合。 关键词:全厂网络时钟同步,SNTP,二级网络时钟同步方案,Private VLAN,ACL,路由,NAT Ways to Implement The Network Time Synchronization In The Plant Chen Yintao Zhejiang SUPCON Co., Ltd., Hangzhou, Zhejiang, 310053 Abstract:The petrochemical projects in the industrial control area run to large, integrative and intelligentized.A large petrochemical project always need to be integrated with many systems like DCS, SIS, CCS and so on .The network of these systems must be independent,while they should use the same network time synchronizer to achieve time synchronization.This article propose several implements of the network time synchronization in the whole plant. Keywords:Network Time Synchronization, NTP, Private VLAN, ACL, Route, NAT. 引言 随着国民经济发展,工控领域也随之蓬勃发展,石化项目如乙烯、炼油等日益趋向大型化、一体化和智能化。大型化体现在项目规模的剧增,典型项目如百万吨乙烯、千万吨炼油。一体化体现在一个大型石化项目往往集成多套系统如DCS、SIS、CCS,这些系统在功能、网络上分别独立,但需要实现全厂统一的时钟同步,以保持全厂所有系统的时钟同步。 普通的网络时钟同步服务器提供的网口较少,一般都在4个以下,同时可支持1-4个网络的系统时钟同步。当需要同步的子系统较多时,则需要配置可同时支持二三十个网络的特殊网络时钟同步服务器。但是在企业建设初期,往往很难准确预计将来的网络发展规模,这就需要事先规划设计
目录 0 前言 (1) 1 总体方案设计 (2) 2 硬件电路设计 (2) 3 软件设计 (5) 4 调试分析及说明 (7) 5 结论 (9) 参考文献 (9) 课设体会 (10) 附录1 电路原理 (12) 附录2 程序清单 (13)
电子时钟的设计 许山沈阳航空航天大学自动化学院 摘要:传统的数字电子时钟采用了较多的分立元器件,不仅占用了很大的空间而且利用率也比很低,随着系统设计复杂度的不断提高,用传统时钟系统设计方法很难满足设计需求。 单片机是集CPU、RAM、ROM、定时器/计数器和多种接口于一体的微控制器。它体积小、成本低、功能强,广泛应用于智能产品和工业自动化上。而51系列的单片机是各单片机中最为典型和最有代表性的一种。,本次设计提出了系统总体设计方案,并设计了各部分硬件模块和软件流程,在用C语言设计了具体软件程序后,将各个模块完全编译通过过后,结果证明了该设计系统的可行性。该设计给出了以AT89C2051为核心,利用单片机的运算和控制功能,并采用系统化LED显示模块实时显示数字的设计方案,适当地解决了实际生产和日常生活中对计时高精确度的要求,因此该设计在现代社会中具有广泛的应用性。 关键字:AT89C2051,C语言程序,电子钟。 0前言 利用51单片机开发电子时钟,实现时间显示、调整和闹铃功能。具体要求如下: (1)按以上要求制定设计方案,并绘制出系统工作框图; (2)按要求设计部分外围电路,并与单片机仿真器、单片机实验箱、电源等正确可靠的连接,给出电路原理图; (3)用仿真器及单片机实验箱进行程序设计与调试;
(4)利用键盘输入调整秒、分和小时时刻,数码管显示时间; (5)实现闹钟功能,在设定的时间给出声音提示。 1总体方案设计 该电子时钟由89C51,BUTTON,1602 LCD液晶屏等构成,采用晶振电路作为驱动电路,利用单片机内部定时计数器0通过软件扩展产生的一秒定时,达到时分秒的计时,六十秒为一分钟,六十分钟为一小时,满二十四小时为一天。闹钟和时钟的时分秒的调节是由一个按键控制,而另外一个按键控制时钟和闹钟的时间的调节。 图1 系统结构框图 该电子时钟由STC89C51,BUTTON,1602 LCD液晶屏等构成,采用晶振电路作为驱动电路,晶振电路的晶振频率为12MHZ,使用的定时器/计数器工作方式0,通过软件扩展产生的一秒定时,达到时分秒的计时,60秒为一分钟,60分钟为一小时,24小时为一天,又重00:00:00开始计时。没有按键按键按下时,时钟正常运行,当按下调节时钟按键K1,就会关闭时钟,当按下闹钟按键K3时时钟就会进入设置时间界面,但是时钟不会停止工作,按K2键,,就可以对时钟和闹钟要设置的时间进行调整。 2硬件电路设计
大楼工程弱电系统 时钟系统 解决方案 西安同步电子科技有限公司二零一四年
大楼工程弱电时钟系统解决方案 时钟系统概述 概述 根据大楼建设工程弱电系统设计要求,本工程设置时钟系统用于统一区域内的时间信息。 标准时钟系统是为工作人员准确、标准的时间,同时也可以为其它智能化系统提供标准的时间源。标准时钟系统的设计将结合实际需要,保证相关人员都能清晰地看到的时钟,并掌握准确时间。 本工程时钟系统主要由网络时间服务器、网络数字式子钟组成。 本系统从GPS地球同步卫星上获取标准时钟信号信息,将这些信息TCP/IP网络传输,传输到各个壁挂网络数字时钟,实现整个子母钟系统的时间统一。 系统特点 精确度高 本系统能够接收来自GPS的标准时间信号,通过网络授时协议NTP/SNTP发送至系统的各个部分,实现无累积误差运行。 可靠性高(系统冗余) 本系统对时间服务器的关键设备都采用无风扇设计,具有四个独立的网络授时接口,当某个网络授时单元发生故障时,能够切换到另外一个单元,实现冗余备份的目的。 兼容性好 系统采用分布式结构,由标准化的软件及硬件组成,用户可按照需要灵活配置和扩容。 根据将来发展的需要,可以将子钟接口分别扩展到128个或256个以满足系统扩容要求。 维护方便 本系统所有主控板、信号板、接口板均采用了目前国际上流行的模块化设计,使相同规格的设备和接口板具有可互换性;积木式结构还为业主未来系统的增容和扩展提供极大的便利。 时钟系统设计与制造技术规范 系统设计规范 采用标准 电气装置安装工程施工及验收规范GBJ/232-92 设备可靠性试验规范GB50807-86 国际电气与电子工程师协会(IEEE) 国际电子学会(IEC)
机场航站楼时钟系统设计方案为适应明勇机场建设发展需要,保证民用机场航站楼弱电系统工程设计质量,特根据《MHT5019-2014民用机场航站楼时钟系统工程设计规范》设计出本时钟系统方案。 专用术语解析 1、母钟:接受标准卫星时间信息,与自身所设的时间信号源进行高科技的校正、处理后,发送时间信号给所属子系统的装置, 2、子钟:接收母钟所发送的信号,进行显示的装置 3、GPS时钟信号:全球定位系统发送的格林威治标准时间信号 一般规定 母钟:SYN4505型标准同步时钟 子钟:SYN6109型NTP子钟 a、常见的民用机场航站楼的时钟系统的作用,应能为机场工作人员、旅客及各计算机管理系统提供准确统一的时间服务。 b、一般机场只设常规子母钟系统,显示北京时间信息,有国际航班的机场,应增设世界钟显示有关城市的当地时间。 子钟的类型分为单面子钟和双面子钟,单面子钟可采用指针式或者数显式。双面子钟宜采用数显式。各类子钟的显示内容可根据实际情况而定,但至少宜显示时分秒,数显钟应进行无反光处理,以保证显示效果。 子钟安装位置 1、指挥调度中心、广播室、会议室、航行气象情报室、机组签
派室及其他对时间有特殊要求的地点宜装设子钟。 2、对时间有特殊要求地航班动态显示机房及其他设备机房等宜装设子钟。 3、在航站楼迎客、送客、候机、办理乘机手续、通道等场所醒目的地方宜装设子钟;在旅客餐厅、休息场所,也宜设置子钟。 4、行李分拣、提取大厅宜装设子钟。 5、由母钟统一校时的航显系统,在设置有能显示时间的航显终端的场所,应尽量减少或取消子钟的安装。 子钟的规格应根据安装的高度和视距的远近而定。安装高度一般距地面2.5m~5m,特殊场合可适当调整,但应满足美观。名目的使用要求。 供电要求 a、母钟和子钟的供电电源,一般由系统所在的电子设备机房的电源供给,当供电距离较远时,也可由就近的可靠电源提供
轨道交通时钟系统解决方案 轨道交通时钟系统解决方案 地铁通信系统一般包括: 时钟系统是轨道交通重要的组成部分之一,而其在地铁站的主要作用是为上班族、来往的游客工作人员提供准确的时间信息,同时时
钟系统要为其他监控系统、控制系统等弱电子系统提供统一的时钟信号,使各系统的定时集中同步,在整个地铁系统中使用相同的定时标准。站厅及站台位置的时钟可以为旅客提供准确的时间信息;各车站办公室内及其它停车场内的时钟可以为工作人员提供准确的时间信息;向其它地铁通信子系统提供的时钟信息为地铁运行提供了标准的时间,保证了轻轨系统运行的准时,安全。 时钟子系统能够向地铁全部通信子系统提供准确的时钟信号。时钟信号以卫星自动定位系统所发的格林威治标准世界时间为准辅以铷原子钟或石英钟。时钟系统的控制中心向各分站或车场二级母钟发送时钟信号,再由二级母钟向其对应的子钟发送时钟信号;同时每站的各路时钟信号均需上传至时钟系统的监控中心,使之可以完成对全路各站所有时钟工作状态的监测和控制,并可在相应的管理客户机上完成各种需要的管理及配置功能。
设计区域:换乘大厅、进出口、监控室、控制室控制中心调度大厅和各车站的站厅、站台、车站控制室、公安安全室、票务室、变电所控制室及其它与行车有关的处所,并在车辆段/停车场信号楼运转室、值班员室、停车列检库、联合检修库等有关地点设置子钟。
相关产品 第一章教育和教育学 1 教育的发展 一、教育的概念 考点:教育是培养人的一种社会活动,是传承社会文化、传递生产经验的和社会生活经验的基本途径。 考点广义:凡是增进人们的知识和技能,影响人们思想观念的活动,都具有教育作用。 狭义:主要指学校教育。 学校教育是教育者根据一定的教育要求,有目的、有计划、有组织的通过学校的教育工作,对受教育者的身心施加影响,促使他
课程设计任务书 题目电子时钟系统设计 专业、班级电信11-02学号 8 瑞 主要容、基本要求、主要参考资料等: 一、主要容: ①熟悉单片机应用系统的设计方法和规,达到综合的目的。 ②学习文件检索和查找数据手册的能力。 ③学习protel软件的使用。 ④学会整理和总结设计文档报告。 二、基本要求: ①以MCS-51系列单片机为核心,组成一个电子时钟系统。 ②系统显示由6位数码管显示组成,分别显示时间值的时、分、秒。 ③能够随时对当前时间进行调整。 ④能够随时输入定时(闹钟)时间。 ⑤定时(闹钟)时间到,发出闹钟提醒信号。 ⑥闹钟提醒信号的声音为断续形式,最长不超过1分钟。 三、主要参考资料: ①毅坤等单片微型计算机原理及应用电子科技大学 ②建忠编著单片机原理及应用电子科技大学 完成期限:2015年1月17日 指导教师签名: 课程负责人签名: 2015年1月4 日
目录 摘要 (1) 1 设计方案选择 (2) 1.1 单片机选型 (2) 1.2 按键模块 (2) 1.3 显示模块 (2) 1.4 计时参考模块 (3) 1.5 显示器驱动模块 (3) 1.6 闹钟响铃模块 (4) 1.7 电源模块 (4) 2 硬件接线及设计 (4) 2.1 单片机晶振配置 (5) 2.2复位电路设计 (5) 2.3 按键电路设计 (6) 2.4 蜂鸣器驱动电路设计 (6) 2.5 显示模块电路设计 (7) 3 软件部分 (7) 3.1 主函数流程图 (7) 3.2 定时器T0中断服务程序流程图 (8) 3.3 闹钟响应程序流程图 (9) 3.4 键盘扫描程序流程图 (10) 4 系统综述 (11) 4.1 上电界面 (11) 4.2 调时界面 (11) 4.3 闹钟设定界面 (11) 4.4 正常走时界面 (12) 4.5 闹钟响应 (12) 附录1 总体设计电路图 (15) 附录2 PCB图 (16) 附录3 元件清单 (17) 附录4 总程序 (18)
电力GPS时钟同步系统解决方案 北京创想京典科技发展有限公司 科 技 领先铸就最佳
什么是时间? 时间是一个较为抽象的概念,爱因斯坦在相对论中提出:不能把时间、空间、物质三者分开解释,"时"是对物质运动过程的描述,"间"是指人为的划分。时间是思维对物质运动过程的分割、划分。 在相对论中,时间与空间一起组成四维时空,构成宇宙的基本结构。时间与空间都不是绝对的,观察者在不同的相对速度或不同时空结构的测量点,所测量到时间的流逝是不同的。广义相对论预测质量产生的重力场将造成扭曲的时空结构,并且在大质量(例如:黑洞)附近的时钟之时间流逝比在距离大质量较远的地方的时钟之时间流逝要慢。现有的仪器已经证实了这些相对论关于时间所做精确的预测,并且其成果已经应用于全球定位系统。另外,狭义相对论中有“时间膨胀”效应:在观察者看来,一个具有相对运动的时钟之时间流逝比自己参考系的(静止的)时钟之时间流逝慢。 就今天的物理理论来说时间是连续的,不间断的,也没有量子特性。但一些至今还没有被证实的,试图将相对论与量子力学结合起来的理论,如量子重力理论,弦理论,M理论,预言时间是间断的,有量子特性的。一些理论猜测普朗克时间可能是时间的最小单位。
什么是时间? 根据斯蒂芬·威廉·霍金(Stephen William Hawking)所解出广义相对论中的爱因斯坦方程式,显示宇宙的时间是有一个起始点,由大霹雳(或称大爆炸)开始的,在此之前的时间是毫无意义的。而物质与时空必须一起并存,没有物质存在,时间也无意义。
卫星时钟系统为什么含有精确的时间信息? 地球本身是一个不规则的圆,加上地球自转和公转的误差,如果仅仅依靠经度、纬度、海拔高度三个参数来定位的偏差会很大,所以 引入了一个时间参数,每个卫星都内置了一个高稳定度的原子钟!
跨时钟域信号同步方法6种 ASIC中心 1 引言 基于FPGA的数字系统设计中大都推荐采用同步时序的设计,也就是单时钟系统。但是实际的工程中,纯粹单时钟系统设计的情况很少,特别是设计模块与外围芯片的通信中,跨时钟域的情况经常不可避免。如果对跨时钟域带来的亚稳态、采样丢失、潜在逻辑错误等等一系列问题处理不当,将导致系统无法运行。本文总结出了几种同步策略来解决跨时钟域问题。 2 异步设计中的亚稳态 触发器是FPGA设计中最常用的基本器件。触发器工作过程中存在数据的建立(setup)和保持(hold)时间。对于使用上升沿触发的触发器来说,建立时间就是在时钟上升沿到来之前,触发器数据端数据保持稳定的最小时间。而保持时间是时钟上升沿到来之后,触发器数据端数据还应该继续保持稳定的最小时间。我们把这段时间成为setup-hold时间(如图1所示)。在这个时间参数内,输入信号在时钟的上升沿是不允许发生变化的。如果输入信号在这段时间内发生了变化,输出结果将是不可知的,即亚稳态 (Metastability) 图1 一个信号在过渡到另一个时钟域时,如果仅仅用一个触发器将其锁存,那么采样的结果将可能是亚稳态。这也就是信号在跨时钟域时应该注意的问题。如图2所示。 信号dat经过一个锁存器的输出数据为a_dat。用时钟b_clk进行采样的时候,如果a_dat正好在b_clk的setup-hold时间内发生变化,此时b_ dat就既不是逻辑"1",也不是逻辑"0",而是处于中间状态。经过一段时间之后,有可能回升到高电平,也有可能降低到低电平。输出信号处于中间状态到恢复为逻辑"1"或逻辑"0"的这段时间,我们
《嵌入式系统》课程设计说明书 电子时钟系统 院部: 学生姓名: 指导教师:职称 专业: 班级: 学号:
湖南工学院嵌入式系统课程设计课题任务书 2.显示的时间为开发板当前的系统时间,显示的结果随着系统时间变化而变 I
摘要 嵌入式操作系统是一种支持嵌入式系统应用的操作系统软件,它是嵌入式系统( 包括硬、软件系统) 极为重要的组成部分,通常包括与硬件相关的底层驱动软件、系统内核、设备驱动接口、通信协议、图形界面、标准化浏览器等Browser 。嵌入式操作系统具有通用操作系统的基本特点,如能够有效管理越来越复杂的系统资源;能够把硬件虚拟化,使得开发人员从繁忙的驱动程序移植和维护中解脱出来;能够提供库函数、驱动程序、工具集以及应用程序。与通用操作系统相比较,嵌入式操作系统在系统实时高效性、硬件的相关依赖性、软件固态化以及应用的专用性等方面具有较为突出的特点。嵌入式技术已成为信息产业中发展最快、应用最广的计算机技术之一,并被广泛应用于网络通信、消费电子、医疗电子、工业控制和交通系统等领域。 本次设计采用QT程序开发框架开发的模拟时钟程序,使用Linux系统到嵌入式终端移植和交叉编译环境搭建,最终成功实现了在嵌入式终端的运行。 关键词:嵌入式系统;QT;模拟时钟;Linux系统
目录 1绪论 (1) 1.1 设计背景 (2) 1.2 设计目的和意义 (2) 2 嵌入式Linux系统 (2) 2.1 嵌入式Linux概念 (2) 2.2 嵌入式Linux组成 (2) 3 Qt工具 (3) 3.1 Qt简介 (3) 3.2 Qt优点 (3) 4 模拟时钟的设计 (4) 4.1 代码的编写 (4) 4.2 代码的调试与运行 (4) 5 模拟时钟到开发板的下载 (6) 5.1 交叉编译环境的构建 (7) 5.2 模拟时钟到开发板的下载运行 (7) 结论 (10) 参考文献 (11) 致谢 (12) 附录 (13)
传输系统中的时钟同步技术同步模块是每个系统的心脏,它为系统中的其他每个模块馈送正确的时钟信号。因此需要对同步模块的设计和实现给予特别关注。本文对影响系统设计的时钟特性进行了考察,并对信号恶化的原因进行了评估。本文还分析了同步恶化的影响,并对标准化组织为确保传输质量和各种传输设备的互操作性而制定的标准要求进行了探讨。摘要:网络同步和时钟产生是高速传输系统设计的重要方面。为了通过降低发射和接收错误来提高网络效率,必须使系统的各个阶段都要使用的时钟的质量保持特定的等级。网络标准定义同步网络的体系结构及其在标准接口上的预期性能,以保证传输质量和传输设备的无缝集成。有大量的同步问题,系统设计人员在建立系统体系结构时必须十分清楚。本文论述了时钟恶化的各种来源,如抖动和漂移。本文还讨论了传输系统中时钟恶化的原因和影响,并分析了标准要求,提出了各种实现技巧。基本概念:抖动和漂移抖动的一般定义可以是“一个事件对其理想出现的短暂偏离”。在数字传输系统中,抖动被定义为数字信号的重要时刻在时间上偏离其理想位置的短暂变动。重要时刻可以是一个周期为 T1 的位流的最佳采样时刻。虽然希望各个位在 T 的整数倍位置出现,但实际上会有所不同。这种脉冲位置调制被认为是一种抖动。这也被称为数字信号的相位噪声。在下图中,实际信号边沿在理想信号边沿附近作周期性移动,演示了周期性抖动的概念。图 1.抖动示意抖动,不同于相位噪声,它以单位间隔 (UI) 为单位来表示。一个单位间隔相当于一个信号周期 (T),等于 360 度。假设事件为 E,第 n 次出现表示为 tE[n] 。则瞬时抖动可以表示为:一组包括 N 个抖动测量的峰到峰抖动值使用最小和最大瞬时抖动测量计算如下:漂移是低频抖动。两者之间的典型划分点为 10 Hz。抖动和漂移所导致的影响会显现在传输系统的不同但特定的区域。抖动类型根据产生原因,抖动可分成两种主要类型:随机抖动和确定性抖动。随机抖动,正如其名,是不可预测的,由随机的噪声影响如热噪声等引起。随机抖动通常发生在数字信号的边沿转换期间,造成随机的区间交叉。毫无疑问,随机抖动具有高斯概率密度函数 (PDF),由其均值 (μ) 和均方根值 (rms) (σ) 决定。由于高斯函数的尾在均值的两侧无限延伸,瞬时抖动和峰到峰抖动可以是无限值。因此随机抖动通常采用其均方根值来表示和测量。图 2.以高斯概率密度函数表示的随机抖动对抖动余量来讲,峰到峰抖动比均方根抖动更为有用,因此需要把随机抖动的均方根值转换成峰到峰值。为将均方根抖动转换成峰到峰抖动,定义了随机抖动高斯函数的任意极限 (arbitrary limit)。误码率 (BER) 是这种转换中的一个有用参数,其假设高斯函数中的瞬时抖动一旦落在其强制极限之外即出现误码。通过下面两个公式,就可以得到均方根抖动到峰到峰抖动的换算。 3[!--empirenews.page--] 由公式可得到下表,表中峰到峰抖动对应不同的 BER 值。确定性抖动是有界的,因此可以预测,且具有确定的幅度极限。考虑集成电路 (IC) 系统,有大量的工艺、器件和系统级因素将会影响确定性抖动。占空比失真 (DCD) 和脉冲宽度失真(PWD) 会造成数字信号的失真,使过零区间偏离理想位置,向上或向下移动。这些失真通常是由信号的上升沿和下降沿之间时序不同而造成。如果非平衡系统中存在地电位漂移、差分输入之间存在电压偏移、信号的上升和下降时间出现变化等,也可能造成这种失真。图 3,总抖动的双模表示数据相关抖动 (DDJ) 和符号间干扰 (ISI) 致使信号具有不同的过零区间电平,导致每种唯一的位型出现不同的信号转换。这也称为模式相关抖动 (PDJ)。信号路径的低频截止点和高频带宽将影响 DDJ。当信号路径的带宽可与信号的带宽进行比较时,位就会延伸到相邻位时间内,造成符号间干扰 (ISI)。低频截止点会使低频器件的信号出现失真,而系统的高频带宽限制将使高频器件性能下降。7 正弦抖动以正弦模式调制信号边沿。这可能是由于供给整个系统的电源或者甚至系统中的其他振荡造成。接地反弹和其他电源变动也可能造成正弦抖动。正弦抖动广泛用于抖动环境的测试和仿真。不相关抖动可能由电源噪声或串扰和其他电磁干扰造成。考虑抖动对数字信号的影响时,需要将整个确定性抖动和随机抖动考虑在内。确定性抖动和随机抖动的总计结果将产生另外一种概率分布
NTP时钟同步系统 技术方案
目录 目录 (2) 一、系统技术规范 (3) 二、时钟系统设计 (5) 1、概述 (5) 1.1、系统特点 (5) 1.2、优化后的时钟同步系统具有以下优势 (5) 2、系统设计原则 (5) 2.1、安全性、可靠性 (6) 2.2、经济合理性 (6) 2.3、先进性、成熟性、可持续性 (6) 2.4、标准性、开放性、互联互通性 (6) 2.5、可用性 (6) 2.6、可兼容性和可扩充性 (7) 2.7、抗干扰性 (7) 2.8、环保低功耗 (7) 2.9、制造工艺规范化 (7) 2.10、设备管理集中化 (7) 3、时钟同步系统架构 (7) 3.1、方案优化的必要性 (7) 3.2、时钟同步系统优化方案 (8) 3.3、时钟同步系统原理 (9) 3.4、工作原理 (9) 4、系统设备结构 (10)
一、系统技术规范 系统所遵循的国际、国家、行业及企业标准包括: GBJ42-81《工业企业通信设计规范》 GBJ79-85《工业企业通信接地设计规范》 GB/T 4857.1-92《包装运输包装件试验时各部位的标示方法》 GB 3873-83《通信设备产品包装通用技术条件》 GB 50174-93《电子计算机机房设计规范》 GB50807-86《设备可靠性试验规范》 GB 50254-96《电气装置安装工程施工及验收规范》 GB 50311-2007《综合布线系统工程设计规范》 YD/T 1012-1999《数字同步网节点时钟系列及其定时特性》 JGJ/T 16-92《民用建筑电气设计规范》 YD/T 5089-2005《数字同步网工程设计规范》 YD/T 5027-2005《通信电源集中监控系统工程设计规范》 YD 5098-2005《通信局(站)防雷与接地工程设计规范》 YD/T5120-2005《无线通信系统室内覆盖工程设计规范》 GA/T331-2001《公安移动通信网警用自动级通信系统工程设计技术规范》电磁兼容和防雷设计相关标准包括: IEC61000-6-2《工业环境中发射标准》 IEC61000-6-4《工业环境中抗扰度》 IEC61000-4-2《静电放电抗扰度试验》 IEC61000-4-3《射频电磁场辐射抗扰度试验》 IEC61000-4-4《电快速瞬变脉冲群抗扰度试验》 IEC61000-4-5《浪涌(冲击)抗扰度试验》 IEC61000-4-6《射频场感应的传导骚扰抗扰度》 IEC CISPR 22 1997《信息技术设备的无线电干扰限值和测量方法》 GB50057-94《建筑物防雷设计规范》 IEC61312-95《雷电电磁脉冲的防护》 YD5068-98《移动通信基站防雷与接地设计规范》