第四章陆标定位
前面,我们讲了推算船位的方法。由于我们在推算时所依据的资料并不很准确,所以得出的船位误差也较大。这样就需要我们找出较为准确的定位方法,其中的一种就是陆标定位。
陆标定位既是观测视界内海图上确知其准确位置的陆标,然后根据观测结果在海图上从被观测目标的位置反推出观测时刻测者所在的船位。
第一节位置线
位置线:对目标进行观测时,其观测值为常数的各点的几何轨迹。
常见的位置线有如下几种
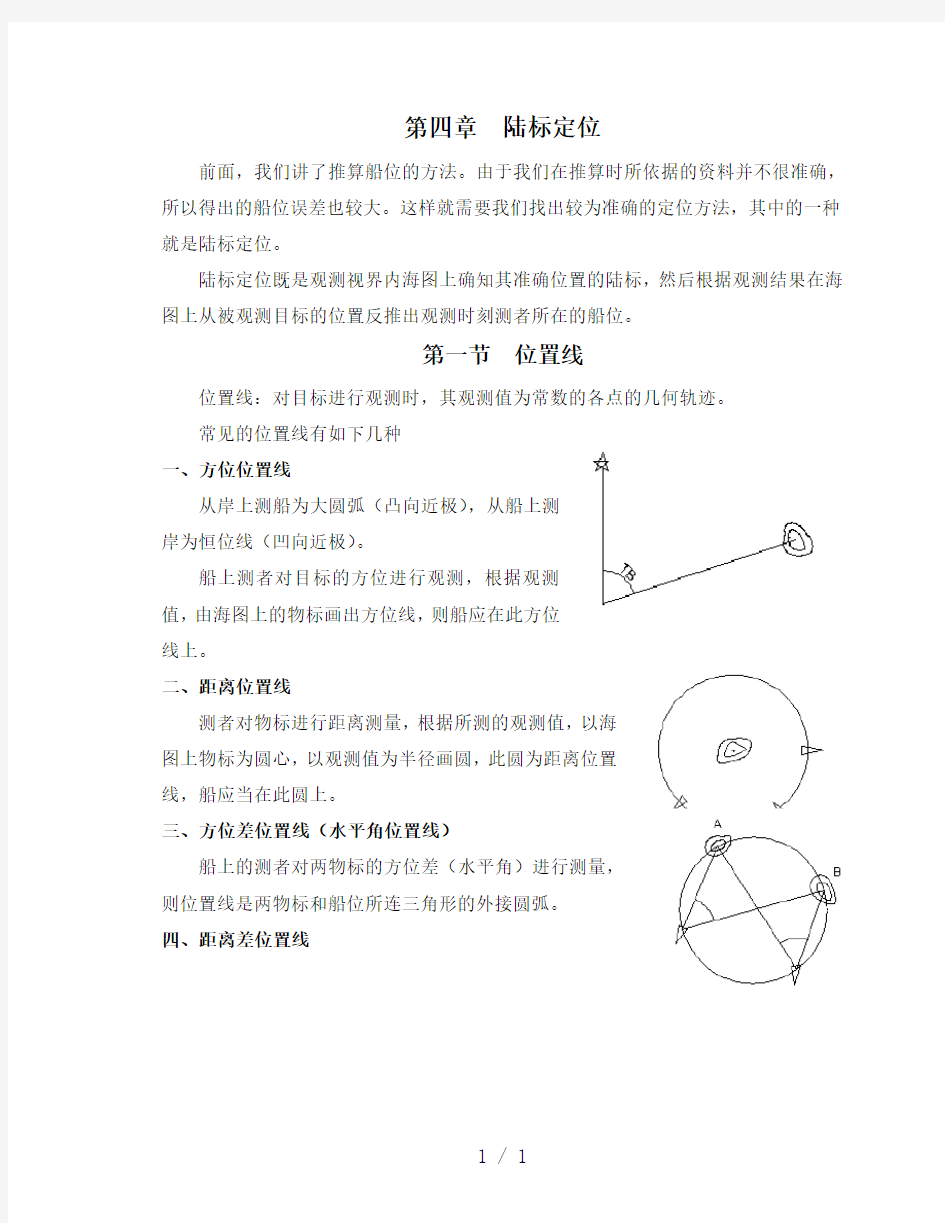
一、方位位置线
从岸上测船为大圆弧(凸向近极),从船上测
岸为恒位线(凹向近极)。
船上测者对目标的方位进行观测,根据观测
值,由海图上的物标画出方位线,则船应在此方位
线上。
二、距离位置线
测者对物标进行距离测量,根据所测的观测值,以海
图上物标为圆心,以观测值为半径画圆,此圆为距离位置
线,船应当在此圆上。
三、方位差位置线(水平角位置线)
船上的测者对两物标的方位差(水平角)进行测量,
则位置线是两物标和船位所连三角形的外接圆弧。
四、距离差位置线
船上测者对两个台站进行距离差观测,则位置线是以两个站台为焦点的某对双曲线。
(恒位线:测某一目标都保持相同大圆方位的的等值
线)
船舶定位就是同时具有两条或两条以上位置线,其交
点为船位。
第二节方位定位
一、两物标方位定位
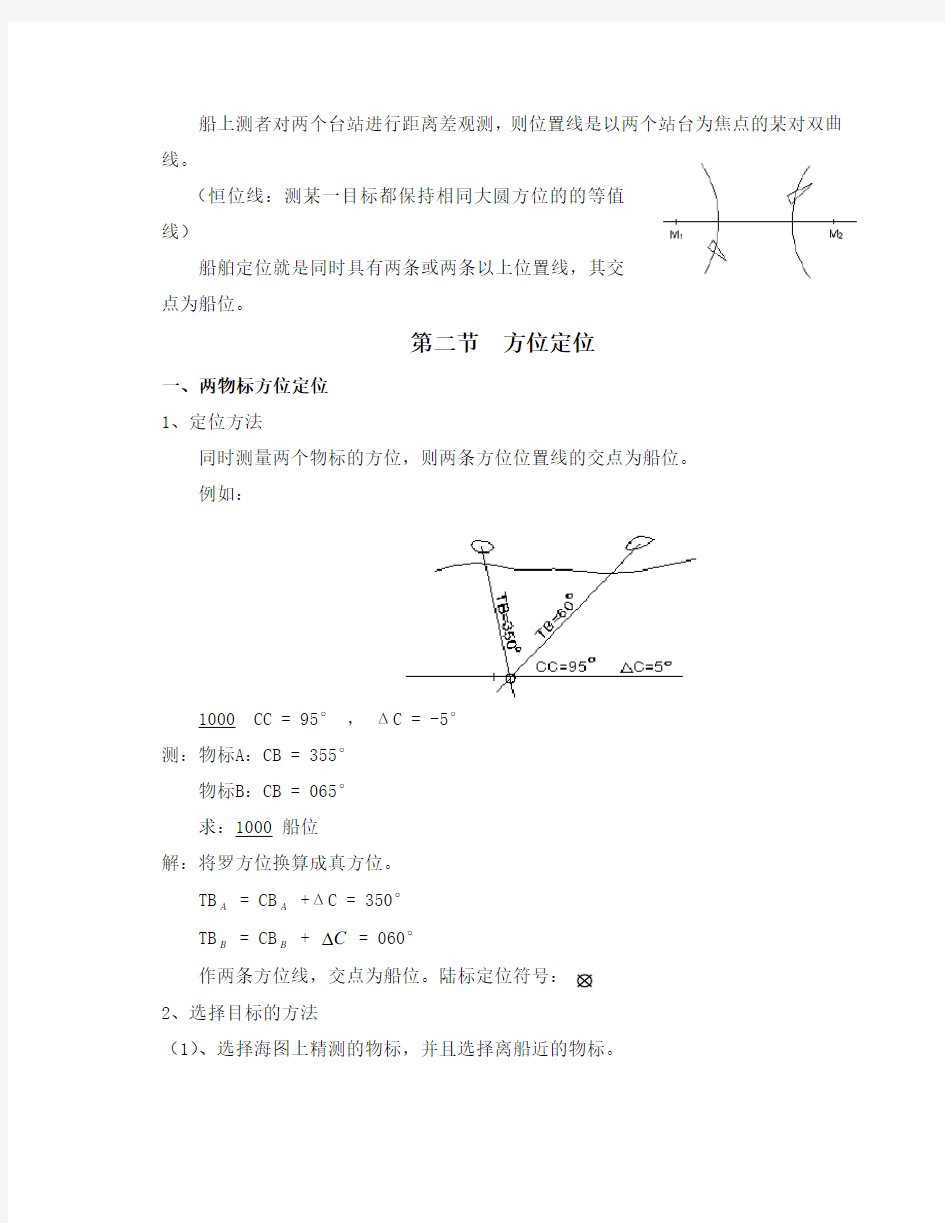
1、定位方法
同时测量两个物标的方位,则两条方位位置线的交点为船位。
例如:
1000 CC = 95° ,ΔC = -5°
测:物标A:CB = 355°
物标B:CB = 065°
求:1000 船位
解:将罗方位换算成真方位。
TB
A = CB
A
+ΔC = 350°
TB
B = CB
B
+ C
= 060°
作两条方位线,交点为船位。陆标定位符号:
2、选择目标的方法
(1)、选择海图上精测的物标,并且选择离船近的物标。
(2)、两方位位置线的夹角尽量接近90°,夹角应在 30° -- 150°范围内。
(画图说明)
3、观测物标的顺序
(1)、白天测物标时,先测方位变化慢的(首尾方向)
后测方位变化快的(正横方向)
由图可见
(2)、夜间测灯标时,先测闪光周期长的,后测闪光周期短的;先测闪光灯,后测定光灯。(缩短两次观测时间间隔。)
二、三标方位定位
1、定位方法
观测三个物标的方位,三条位置线交于一点为船位(或然船位)。
为了减少误差,三条位置线的夹角应接近60°或120°。
但是在多数情况下三条位置线不交于一点,出现误差三角形。
2、产生误差三角形的原因
A、不可能“同时”观测三个物标方位。
B、观测误差。
C、作图误差。
D、罗径差有误差。
E、海图上物标位置不准确。
3、小误差三角形的处理方法
此种三角形可认为由偶然误差引起。
(在大比例尺海图上每边的边长不大于5毫米。)
但此种船位只是最或然船位,且真实船位在三角形内的可能性只有1/4,不可能
求出真实船位。
4、大误差三角形的处理方法
(连续观测,三角形的大小及方向不变)
此种三角形是由于系统误差引起的,主要是ΔC 不准或ΔG 不准。 消除方法
(1)、利用叠标测出自差。
(2)、用绘图法去掉罗径误差求准确船位和ΔC 原理:见课本97页,或画图说明。 具体做法:
A 、将每条方位线移动3° -- 5°,重新划线得到新的误差三角形。
B 、将两个三角形相对应的顶点用直线连接。
C 、三条直线交于一点为船位,或出现小三角形,可按小三角形的处理方法找出船位。
D 、从船位侧三个物标的真方位,与三个罗方位相减得到1C ?、2C ?、3C ?。
则: 3
3
1C C C C ?+?+?=
?
(3)、将三标方位定位改为三标两夹角定位。 定位的方法见后面。 三、船位差
同一时刻的推算船位到观测船位之间的方向和距离叫做船位差或位移差。 代号ΔP 。当ΔP 较大时,经过船长同意可以从观测船位开始做下一步的推算,并将船位差记到航海日志中。如果船舶转向则必须转移航迹线。
记载方法:ΔP 020°--5’.2
四、识别物标的方法
1、利用对景图识别物标。
在海图或航路指南等资料中附有物
标的对景图。(见课本91页),并标注物标的方位和距离。
2、利用目标等高线、特点识别物标
等高线越多、目标越高,等高线越密、目标越陡。
3、利用已知物标识别未知物标
(1)、同时测2到3个已知物标和未知物标的方位。
(2)、用已知物标的方位进行方位定位。
(3)、由船位作出未知物标的方位线,所经过的海图图上物标就是实际中的未知物标。再反复多次加以证实。
也可以利用此法,在海图上补画必要的物标位置。
4、利用船与物标的相对方位识别物标
(1)、先由推算船位点画出航向线。
(2)、转动海图使航向和船首方向一致。
(3),将船前、后、左、右的物标分开逐个对比识别。
(4)、用多方位定位,逐个加以验证。
第三节水平角定位
用六分仪测定两个物标的水平角,此种定位方法是陆标定位中精度最高的定位方法,也可以用方位差求得水平角,但此时的精确度就降低到与观测方位定位一样了。
一、定位方法
测三个物标两两之间的水平角,然后作水平角位置线,两条位置线的交点为船位。
1、几何作图法(这种方法不常用)
见图:
2、三杆定位仪定位
(1)、将两个观测的水平角(或方位差)定在三杆分度仪上。
(2)、推动三杆分度仪在海图上将三个杆分别对准三个物标,则分度仪中心为船位。
3、透明纸法定位。
(1)、在纸上选择一点F,由F点根据水平角度划出三条直线。
(2)、在海图将三条直线对准三个物标,则F所对的海图位置为船位。
二、水平角定位的注意事项
1、选择物标的高度应当与眼高大致相同,即大致在同一水平面上。
2、避免船与物标四点共圆。
3、物标之间距离远,船与中标的距离近。
4、水平角位置线夹角应在 30° - 150° 之间。
一般情况下此方法并不常用,除非要求定位精度很高的情况下,才使用这种方法。 两条位置线的夹角为 ∠1 +∠2 。
测定水平角的顺序: 先测角AOB ,后测角BOC 。
三、在下列情况下应当使用三标两夹角定位 1、测定船舶旋回圈和冲程时。
2、对罗径差有怀疑,无法用方位定位时。
3、当船舶在新发现的浅滩上搁浅、要求精测浅滩位置时。
4、在铺设航标、水底电缆和作补充测深时,要求准确位置时。
第四节 距离定位
一、测定距离的方法
1、雷达测距离(在航海仪器课中讲述)
2、测物标垂直角求距离
用六分仪测定垂足在视野内的物标的垂直角。
则:H ctg D ?=α = H/'
1'arc H
tg αα=
D ('
)
(856
.1)αm H nmile = H :物标高度。可由海图上查出。
我国航海表Ⅲ-7a 垂直角求距离表,即由此公式制成。 此时应当注意:
利用垂直角求距离时,应当使e 低,物标垂足在视界内,并且高、陡(岸距小),在潮差较大的海区,应当进行潮差改正。 二、距离定位的方法
同时测两物标的距离,两条距离位置线的交点为船位。 举例说明: 三、测定物标的顺序
先测距离变化慢的(正横方向),后测距离变化快的(首尾方向)。
第五节 移线定位
当海中只有一个固定目标,并且每一时刻只能得到一条位置线时,可用移线定位方法。
一、转移位置线的原理
参见课本103页,或画图讲述 二、单物标方位移线定位。 具体做法
1、从物标画第一条方位线与航迹线交于A 点;
2、由A 点起沿航迹线量取两次观测之间的航程到B 点;
3、从B点做第一条方位线的平行线 -- 移线;
4、从物标画第二条方位线与移线交于一点为船位。
举例:各种情况下的方位移线定位。
当有水流存在时,应当考虑流的影响。
如果第一条方位线与流向平行,不会产生转移误差。
如果垂直,误差最大。
三、距离移线
移动圆心。
具体做法
1、从物标画航迹线的平行线AB,并且根据两次观测之间的航程截取B点。
2、以B为圆心,以第一次观测的距离为半径画弧,即移线。
3、作第二时间的距离位置线与移线的交点为船位。
举例说明
四、特殊方位移线定位
1、船首倍角法(无风流)
第二次观测物标的舷角等于第一次观测的两倍,则此时,船到物标的距离等于两
时间之间的航程。
因此可将移线定位改为单物标方位距离定位。
TB = TC + 2Q D = S 2、四点方位法
即:第一次观测 Q = 45°,第二次观测 Q = 90°。则两次观测方位之间的航程S 等于物标正横距离D 。
航海上常用此种方法求物标的正横距离。 3、任意舷角求正横距离。
D = )
sin(sin αβα
-?
L S
D = D =?βsin )sin(sin αβα-?L S =β
αctg ctg S L -?1
设 : M =
β
αctg ctg -1
,则 D = M S L ?。
在航海表中有任意舷角求正横距离表,查表引数为第一次观测的Q 1和方位变化量Q 2- Q 1,可查出M 。 4、特殊角法
当:α = 26.5°、β = 45°时,两次观测间的航程等于物标的正横距离。
即:D = S L 。
当:α = 22.5°、β = 45°时, D = 7/10×S
L
当:α = 30°、β = 60°时, D = 7/8×S
L
五、有准确船位后的单物标两方位移线定位
船舶在获得船位点F后,又在不同时间内测得物标M的两条方位线,则可利用单物标三方位法求出航迹线,航迹线与方位线的交点为船位。
具体做法
在航向线上,取P
1与TC的交点为A,按
2
1
:
:t
t
AB
FA 找到B点。
t
1
:为定位后到第一次观测的时间间隔。
t
2
:为从第一次观测到第二次观测的时间间隔。
由B点作P
1线的平行线P
1
’与P
2
的交点为第二次观测时的船位F
2
。连结F和F
2
为
CA线,与P
1线的交点F
1
为第一次观测时的船位。
六、移线定位的注意事项
1、应当沿航迹线移线,移动实际航程(两次观测间的航程)。
2、移动时间不宜过长。
3、方位变化量应大于30°,接近于90°。
第六节综合定位利用不同性质的位置线定位。
一、方位、距离定位
同时测某物标的方位和距离,两位置线的交点为船位。 灯光定位法:利用灯光的初显和初隐定位。 D = 2。09 ()H e + 。 TB 可以测得。 二、方位水平角定位
两标方位定位时,当其中一个物标方位无法用罗径测得,则先测两物标夹角,再测一个物标的方位。则另一物标方位为: TB ±=12TB α右左
可按两物标方位定位法定位。 三、方位测深定位
同时测得方位和水深,由物标划出方位线,用修改后的水深点在方位线附近寻找与测深相同的海图水深点,则此点为近似船位。 水深 = 测深 + 吃水 - 潮高 。
此法在水深变化不明显、或水深变化不规则的水域不要使用。
第七节 单一船位线的使用
一、导航
船舶沿此位置线航行,可保证安全。 二、转向
选择一条通过既定转向点的位置线来控制转向时机。 三、避险
利用位置线作为安全水域和危险水域的分界线。船在航行中以此线作为避险依据。
四、测定仪器误差
仪器误差 = 真值 - 观测值。
例如:船位已知,测某物标得到CB,在海图上量出TB
则:ΔC = TB - CB
五、判断船位误差
位置线与航线平行,则可以判断船位偏离计划航线的方向和大小。
位置线与航线垂直,可判断船位超前或落后于推算船位。
位置线与子午线平行,可确定船位的经度。
位置线与子午线者垂直(与纬线平行),可确定船位的纬度。
(注:本资料素材和资料部分来自网络,仅供参考。请预览后才下载,期待您的好评与关注!)