台达HMI宏指令与安迪伺服系统通讯
- 格式:doc
- 大小:547.00 KB
- 文档页数:7

官方网址台达PLC与组态王通过ModbusTCP通讯台达PLC与组态王通过ModbusTCP通讯步骤是怎样的?成都永浩机电工程技术有限公司做了以下总结,供大家参考:1、打开组态王设备配置向导,选择莫迪康ModbusTCP通讯协议。
2、选择串口号,与PLC连接的COM口。
3、输入PLC地址,与PLC在一个网段内,502代表PLC端口,01代表PLC地官方网址 址,地址与端口需与PLC对应。
4、定义变量,输入与PLC寄存器对应的地址。
注意:MODBUS地址中,HEX地址与绝对地址对应关系如下:官方网址如果您想要了解更多关于台达PLC与组态王通过ModbusTCP通讯方面的信息,成都永浩机电工程技术有限公司就是一个不错的选择!成都永浩机电工程技术有限公司引进德国先进的技术,开发了艾拓利尔品牌系列流量、液位、压力产品,长期与德国许多大型仪表企业技术合作,产品不断更新换代。
研发的AP200系列压力变送器采用了先进的模块一体化设计,独立菜单操作,液晶背光显示。
产品变送器防护等级达到IP65~IP68,适应于潮湿、浸泡等恶劣环境下的使用。
成都永浩机电工程技术有限公司成立于2006年,是专注于自动化技术的领导厂商。
面对日益严峻的环境问题以及工业自动化落后的现状,永浩长期致力于自控仪表及自控系统的研发、集成,秉乘“开创智能、环保新时代”的经营使命,整合国际先进自动化技术,持续开发创新节能产品及解决方案,不断努力提升自控技术在各行业的应用和转化,以减轻环境问题对经济发展的冲击以及劳动力成本攀升对工业制造的制约。
近年来,永浩已逐步从自控仪表的提供商成功转型为整体解决方案的服务商,深耕“传感层产品”、“控制层产品”及“行业解决方案”三大业务范畴。
成都永浩机电工程技术有限公司是台达产品经销商,专注于自动化过程控制,现场仪表设计、销售服务的现代化高新技术企业,公司引进德国先进的技术,开发艾拓利尔品牌系列流量、液位、压力产品,长期与德国许多大型仪表企业技术合作,产品不断更新换代,自投入市场以来,广泛应用于石油、化工、电力、冶金、环保、制药、水处理等行业,得到了广大用户的一致好评。

配线及操作模式公司:中达电通股份有限公司部门:运动控制产品处(IMS)日期:2013年12月01主要内容2伺服配线及操作接口功能及典型接线 面板操作介绍控制功能位置模式 速度模式 扭矩模式 混合模式D/I 功能伺服配线电源回生电阻上位控制器第二路反馈Can 总线接口扩展DI接口动力及编码器反馈个人电脑通讯主机CN1连接器实物图此图为连接件背面端子号码及信号名称NC为内部使用,请勿连接任何器件DI/DO为数字输入/输出端子,其功能可自由设定,详见DI/DO功能设置CN2连接器电机输出线CN6终端电阻终端电阻参数设置流程报警记录查看寸动操作在SERVO ON状态下进入参数模式P4-05按SET键调整速度按SET键正反向寸动台达伺服可以在多种模式下进行控制单一模式支持速度,位置,扭矩模式同时支持在不同模式间进行转换支持总线CANopen控制控制模式选择参数P1-01模式选择需在SERVO OFF状态,系统需重新上电1.Pt位置模式P1-01=0,设置驱动器为外部位置(Pt)模式P1-00:用来设置外部输入脉冲的型式脉冲型式滤波宽度逻辑型式2.内部位置模式P1-01=1设置驱动器为内部寄存器位置控制模式驱动器提供64组寄存器,可供用户进行规划,通过I/O或通讯的方式选择要执行的路径速度模式速度模式应用于精密速度控制场合命令源分两种:模拟量(+/-10V)、内部寄存器命令内部寄存器速度命令可以通过通讯方式随时进行更改通过合理的增益调整可以实现高响应,高精度速度控制相关参数速度命令选择P1-01=2为S模式P1-01=4为Sz模式具体命令来源见下表速度模式架构命令处理单元架构。

台达伺服工作原理一、引言台达伺服是一种广泛应用于工业自动化领域的电机控制系统。
它可以通过精确控制电机的转速、位置和力矩,实现高精度、高效率的运动控制。
本文将详细介绍台达伺服的工作原理,包括伺服系统的组成、信号传递、闭环控制和反馈机制等方面。
二、伺服系统的组成台达伺服系统主要由伺服电机、驱动器和控制器三部分组成。
1. 伺服电机:伺服电机是伺服系统的执行器,负责将电能转化为机械能。
台达伺服电机采用先进的永磁同步电机技术,具有高效率、高转矩密度和低惯量等特点。
2. 驱动器:驱动器是控制电机运动的关键部分。
它接收控制器发送的指令信号,并将其转化为适合电机驱动的电流信号。
台达伺服驱动器采用先进的PWM控制技术,能够精确控制电机的转速和力矩。
3. 控制器:控制器是伺服系统的大脑,负责生成控制信号并监测反馈信号。
台达伺服控制器采用先进的数字信号处理技术,具有强大的计算和控制能力。
三、信号传递台达伺服系统中的信号传递主要包括指令信号、反馈信号和报警信号三种。
1. 指令信号:指令信号是控制器发送给驱动器的控制信号,用于控制电机的运动。
指令信号一般包括转速、位置和力矩等信息。
2. 反馈信号:反馈信号是从电机传感器返回到控制器的信号,用于监测电机的实际运动状态。
常见的反馈信号包括位置反馈、速度反馈和力矩反馈等。
3. 报警信号:报警信号是指在伺服系统发生故障或超过设定的安全范围时,控制器发送给外部设备的警报信号。
报警信号可以用于停止电机运动或采取其他保护措施。
四、闭环控制台达伺服系统采用闭环控制方式,通过不断比较反馈信号和指令信号的差异,调整电机的控制信号,使得电机的实际运动与期望运动保持一致。
闭环控制主要包括以下几个步骤:1. 位置控制:控制器根据指令信号和位置反馈信号的差异,计算出电机的位置误差,并生成相应的控制信号,使得电机朝着期望位置运动。
2. 速度控制:控制器根据指令信号和速度反馈信号的差异,计算出电机的速度误差,并生成相应的控制信号,使得电机以期望速度运动。
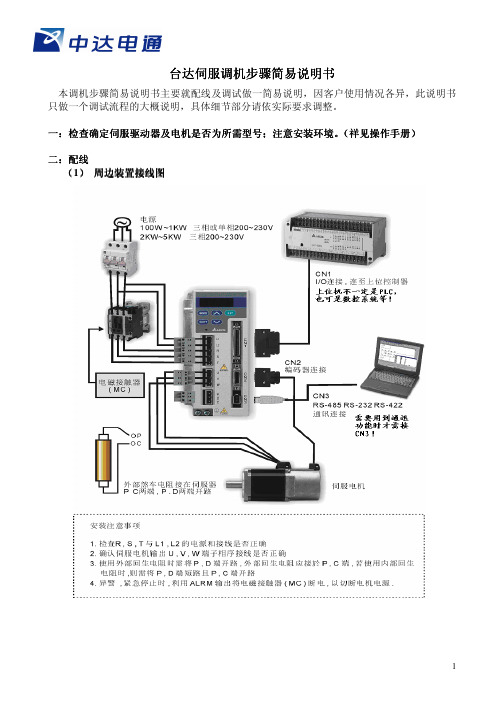
台达伺服调机步骤简易说明书本调机步骤简易说明书主要就配线及调试做一简易说明,因客户使用情况各异,此说明书只做一个调试流程的大概说明,具体细节部分请依实际要求调整。
一:检查确定伺服驱动器及电机是否为所需型号检查确定伺服驱动器及电机是否为所需型号;;注意安装环境注意安装环境。
(。
(祥见操作手册祥见操作手册祥见操作手册))二:配线(1) 周边装置接线图(2) 信号与配线请根据您所需的控制模式和具体要求功能来配线,不同控制模式的配 线是不同的,具体请参照手册3-23至3-26页说明。
但请注意, 1.无 论是什么控制模式,伺服驱动器均需DC24V 电源,您可以让驱动器自已 供给此电源(PIN17脚VDD 与PIN11脚COM+短接);也可以外加POWER 供电(+24接伺服驱动器PIN11脚COM+,GND 接伺服的PIN45,47,49 脚COM-); 2.驱动器均需SERVO ON ,如参数没有变动,PIN9脚DI1 SON 信号需导通。
您可以根据您的需要让PIN9与PIN45等常时短接或用个开 关量来控制它的ON-OFF ; 3.如果您没有用到CW ,CCW 禁止极限和外加 急停按扭,则请把PIN 32,PIN31 ,PIN30与PIN45等COM-脚短路。
(3) 编码器接线1.編碼器引出線連接頭規格:驅動器容量 電機型號 Encoder Connector定義100w ASMT-01L250X 200w ASMT-02L250X 400w ASMT-04L250X 750WASMT-07L250XHOUSING:AMP (1-1318118-6)A1KW ASMT-10L250X ASMT-10M250X 2KW ASMT-20L250X ASMT-20M250X 3KW ASMT-30L250X ASMT-30M250X 5KWASMT-50M250X20-29 17-#16MS3106B20-29SB端子定義內容 A 端子 A1 B1 A2 B2 A3 B3 A5 B5 B6 A /A B /B Z /Z 5V GND 颜色 蓝 蓝/黑 绿 绿/黑 黄 黄/黑 红 黑 BRAID SHELDB 端子 A BCD F G S RA/AB/BZ/Z5VGND線材選擇請使用附隔離網線的多芯双绞線線材選擇請使用附隔離網線的多芯双绞線,,而隔離網線要確實與SHIELD 端相連接端相連接!2.CN2接头定义:附件附件::电子齿轮比设定步骤1. 确认机械规格确认机械规格与电子齿比设定相关的要素有:齿轮比;螺杆节距;滑轮直径等。

使用台达AS200系列PLC实现与MOTEC ARES直流伺服驱动器通信测试教程摘要:本例程通过使用台达AS200系列PLC实现与MOTEC出品的ARES智能直流伺服驱动器实现CANopen,主要是使用PDO的通信方式,实现位置模式,速度模式,电流模式的控制以及自由的切换。
关键字:台达AS200 MOTEC 直流伺服CANopen PDO 位置速度电流一 背景简介台达PLC系统作为市场上广泛应用的PLC控制器,在各行各业都有大量的应用。
具有CANopen接口的MOTEC ARES系列智能直流伺服驱动器可以直接与具有CANopen接口的台达PLC系统进行通信。
在本例中,使用的是台达AS200系列PLC,型号为AS228T驱动器使用的是MOTEC出品的ARES8015-E-AC直流伺服驱动器,电机使用的是MOTEC 的DSEM-V-241230E60LN直流伺服电机,同时使用CAN分析仪进行数据监控。
二 系统连接图本例程中只接了一台ARES DC servo,实际可以挂接多台。
为了方便,本例中同时使用RS232将伺服驱动器的调试线缆也接上,可以通过驱动器的监控界面监控电机的状态,设置CAN通信速率,驱动器的地址,如图1。
图2中显示了驱动器的通信接口的定义。
USBCAOPENRS232ARES DC SERVOAS228TPC图1 系统接线图图2 驱动器通信部分示意在进行CANopen通信时,AS228T既支持过程数据(PDO)通信,也支持服务数据(SDO)通信。
PDO速度快多用于数据交换,SDO对实时性要求不高多用于对从站的配置和非周期读写。
由于伺服驱动器在运动控制过程中,需要将目标速度,位置,电流或者当前速度,位置,电流等进行大量的数据交换,并且基本上一直使用一种控制方式做运动控制,本例中,只介绍使用PDO进行数据通信的内容,对于SDO通信部分,请咨询台达技术工程师。
三 系统配置3.1配置驱动器的CAN通信参数使用RS232连接到驱动器之后,在“MotionStudio”软件的左侧资源栏里面,能够看到驱动器的型号,如果图标是黄色,表示已经连接到了驱动器。

海为PLC与伺服采用通讯进行精确定位控制
前言:随着科技的发展,产品越来越精细,这无疑对设备也提出了更高的控制要求。
高精度的设备大多要用到伺服来进行定位控制,但多数的伺服都是采用脉冲来控制,可对于一个不能产生高脉冲或高速脉冲输出不高的控制器来说这无疑是可望而不可及的事。
但是对于可用通讯来进行控制的伺服来说,只要有高速的通讯功能也是可以对伺服进行精确的定位控制。
现就海为PLC与台达AB系列的伺服采用通讯控制来达到高精度的位置控制做一介绍。
解决方案:
如上图所示,系统主要由触摸屏、海为PLC、伺服系统和执行机构组成。
触摸屏:用与数据的输入和显示用
海为PLC:。
如何让台达plc与多台变频器通讯如何让台达plc与多台变频器通讯,成都永浩机电工程技术有限公司做了以下总结,供大家参考:EH系列PLC与M系列变频器之间使用PLC LINK功能实现数据读写:实验要求:电器接图:变频器参数设置:PLC程序:数据读取区块:变频器通讯地址命令:2000H:写入: H01停止 H12正向运行 H22反向运行 H13正向点动 H23反向点动2001H:运行频率设定列:写入5000为50.00HZ2002H:写入:H02故障复位通讯读写区块:如果您想要了解更多关于台达plc与多台变频器通讯方面的信息?成都永浩电工程技术有限公司就是一个不错的选择!成都永浩机电工程技术有限公司引进德国先进的技术,开发了艾拓利尔品牌系列流量、液位、压力产品,长期与德国许多大型仪表企业技术合作,产品不断更新换代。
研发的AP200系列压力变送器采用了先进的模块一体化设计,独立菜单操作,液晶背光显示。
产品变送器防护等级达到IP65~IP68,适应于潮湿、浸泡等恶劣环境下的使用。
成都永浩机电工程技术有限公司成立于2006年,是专注于自动化技术的领导厂商。
面对日益严峻的环境问题以及工业自动化落后的现状,永浩长期致力于自控仪表及自控系统的研发、集成,秉乘“开创智能、环保新时代”的经营使命,整合国际先进自动化技术,持续开发创新节能产品及解决方案,不断努力提升自控技术在各行业的应用和转化,以减轻环境问题对经济发展的冲击以及劳动力成本攀升对工业制造的制约。
近年来,永浩已逐步从自控仪表的提供商成功转型为整体解决方案的服务商,深耕“传感层产品”、“控制层产品”及“行业解决方案”三大业务范畴。
成都永浩机电工程技术有限公司是台达产品经销商,专注于自动化过程控制,现场仪表设计、销售服务的现代化高新技术企业,公司引进德国先进的技术,开发艾拓利尔品牌系列流量、液位、压力产品,长期与德国许多大型仪表企业技术合作,产品不断更新换代,自投入市场以来,广泛应用于石油、化工、电力、冶金、环保、制药、水处理等行业,得到了广大用户的一致好评。
机器人控制器(DCS)自由口TCP/IP通讯方法简介:机器人与外界设备可以自由口Scoket通讯。
但是目前DCS控制器只能作为客户端使用。
可以实现发送接收功能,字符串解析。
以下介绍常见自由口通讯几个函数的使用。
本文以DRAStudio_v1.00.07.18版本进行测试。
调试助手为NetAssist.exe。
一、函数介绍2.:3.接收数据:4.分隔数据:5.断开连接:二、范例说明1、说明:这里范例以调试助手和手臂控制器进行说明,实际设备操作方法相同。
调试时电脑IPv4设置为固定IP,地址为192.168.1.96,调试助手端口号改为600。
手臂以发送字符串“Trig”模拟发送触发拍照信号,然后再接收相机返回拍照结果。
范例特意使用两次分隔字符串,讲解指令使用。
实际使用中最好只要分隔一次,减少程序的复杂性,这需要与对应设备沟通定义发送与接收格式。
2、接收数据的功能块接收数据的功能块,接收数据和解析字符串。
在接收数据时一定告知对方,我们接收数据必须以【\r\n】结尾,否则收不到数据。
a)这里编写while循环一直等待数据的接收,条件not Data表示Data为nil时一直等待,直到Data有数据时跳出循环。
b)判断Data数据长度是否为3(这里长度3表示字符串被分隔成3部分),#Data可以获取数组的长度,可以当做条件判断数据是否正确。
else条件这里简单编写为QUIT(),实际项目中要编写异常处理程序。
c)解析分隔后的数据,这里举例说明split函数使用,实际中数据格式定义尽可能分隔一次就好,减少程序复杂性。
tonumber函数可以将字符串转换为数值。
用以操作坐标数据运算等。
3、连线与发送数据a)根据实际情况填入参数,可在程序初始化时连接一次服务器。
b)发送数据,默认以\r\n结束,结束符在发送与接收时非常重要,要与对方设备定义相同,不然会出现数据收不到的情况。
4、实际操作截图发送数据数据接收与解析变量与地址监控结果。
台达A2伺服配线及操作伺服系统是现代工业自动化中的重要组成部分,具有高性能、高精度、高可靠性等优点。
其中,台达A2伺服是一种高性价比的伺服系统,广泛应用于各种自动化设备中。
本文将详细介绍台达A2伺服配线及操作方法。
一、伺服系统组成1.1伺服驱动器:伺服驱动器是伺服系统中的核心部件,负责接收控制信号并控制伺服电机输出相应的转矩和速度。
台达A2伺服驱动器具有多种保护功能,如过流,过压,过热等保护,可有效保护系统。
1.2伺服电机:伺服电机是伺服系统的执行部件,通过接收驱动器控制信号来实现精确的位置和速度控制。
台达A2伺服电机具有高速响应,低噪音,高功率密度等特点。
1.3编码器:编码器是用来反馈电机实时位置信息的设备,可以保证伺服系统的运动精度。
台达A2伺服系统支持多种编码器接口,如绝对值编码器,增量编码器等。
1.4控制器:控制器负责生成伺服系统的控制信号,并对反馈信号进行处理,以实现闭环控制。
台达A2伺服系统支持多种控制方式,如位置控制,速度控制,力控制等。
二、伺服系统配线2.1电源接线:伺服系统的电源接线非常重要,必须按照驱动器和电机的额定电压和功率要求进行连接。
一般情况下,电源接线应该使用优质的电缆,并保证接线牢固可靠。
2.2信号接线:伺服系统的信号接线包括控制信号和反馈信号。
控制信号一般是通过控制器发送给驱动器的指令,而反馈信号用于电机实时位置的反馈。
信号接线也要保证牢固可靠,并且不要出现干扰情况。
2.3地线接线:地线接线是伺服系统中非常重要的一环,它可以有效减小系统的噪声,并保证系统的稳定性。
在连接地线时,应尽量选择独立的地线进行接地,避免共用。
2.4信号连接:在安装伺服系统时,需要根据系统手册中提供的接线图进行连接,确保每条信号线连接正确。
在连接过程中注意防止短路和接触不良等问题。
三、伺服系统操作3.1参数设置:在使用台达A2伺服系统之前,需要对其进行参数设置,包括电机参数,速度参数,位置参数等。
DMA機電知識庫
第1頁 共7 頁
台达HMI宏指令与安迪伺服系统通讯
东北大区业务支援处 FAE 孙承志
【摘要】
本文主要介绍了台达人机界面与国产安迪伺服系统宏指令通讯应用
案例,结合具体的宏指令编程语言的应用方法和技巧,详细地介绍了宏
指令自由协议通讯程序的系统架构、具体步骤、软件算法以及实现方法,
对今后类似的HMI通讯技术应用具有很好的借鉴作用。
【关键字】
宏指令 自由协议 RS-232通讯
【前言】
台达DOP系列人机界面均具有宏指令软件编程功能,可以根据客户
设备或者生产线具体工艺技术要求灵活应用,解决自由协议通讯连接,
实现读取参数、设定参数等功能。还可以通过宏指令软件编程,实现HMI
驱动微型打印机功能,配合HMI控制程序,完成设备现场工艺参数打印
存档。除此之外,宏指令还有其他强大的功能,可以实现一些HMI普通
软元件编程组态无法完成的任务,活学活用台达HMI宏指令,可以增强
HMI程序控制功能,提升台达HMI差异化竞争能力。应用工程师在项目
实践中,HMI控制程序组态编程过程时,适当地加入宏指令程序,可以
简化组态程序和下位控制器(PLC或者其他专用控制器或者驱动器等)
控制程序,达到事半功倍的效果。
【正文】
DMA機電知識庫
第2頁 共7 頁
安迪伺服系统产地辽宁大连,属于通用型交流伺服系统,该伺服驱
动器带有8Pin Mini圆型通讯接口,支持RS232/422/485三种通讯格式,
使用者可籍由此口连接上位机(PC机或者HMI等),实现通讯读写参数
或者命令、状态信息等功能。本案例应用台达DOP-B05S100型号的HMI,
连接安迪ADSD-S23-0.75K伺服系统,HMI读取伺服当前运行速度值,将
变化的速度值实时显示在HMI画面上,下面详细介绍宏指令编程步骤和
技巧,对于读取或者写入其他参数值或者状态信息,请以此例程为借鉴
样本,更改欲访问的参数地址即可实现。
通讯组网硬件接线如下图:
台达DOP-B05S100人机界面COM2口RS-232方式管脚定义如图所示:
安迪伺服系统8Pin Mini通讯口管脚定义如图所示:
台达HMI通讯接口COM2为通用标准RS-232串口定义,和PC机串口
相同,所以通讯连接电缆制作图按照上图制作即可。
DMA機電知識庫
第3頁 共7 頁
安迪伺服系统通讯口RS-232方式固定的通讯格式:
台达HMI宏指令通讯程序三步走:
1、 初始化通讯口;
2、 选择通讯口;
3、 经由已选定的通讯口,发送或者接收数据;
本案例宏指令通讯程序分为两大部分:Initial宏和Clock宏,前
者编写初始化通讯口程序,后者编写发送、接收数据程序,以及进行相
应的数据转换和计算。
初始化通讯口宏指令语言:
由于安迪伺服系统固定通讯格式为:9600bps,8,N,1,所以必须将HMI
COM2通讯格式初始化为相同的格式。
DMA機電知識庫
第4頁 共7 頁
选择通讯口和经由通讯口发送、接收数据的宏指令语言如下图所示:
选择通讯口和数据发送、接收宏指令变成如下图所示:
DMA機電知識庫
第5頁 共7 頁
下面结合安迪伺服铜须具体协议详细讲解宏指令编程应用方法:
我们想读取伺服驱动器的当前速度值,对应地址为:
安迪伺服系统读取参数(向驱动器的请求)通讯协议如下:
伺服系统运转速度值是一个整型变量,适用于上图方框中的格式。
也就是HMI通过宏指令Putchar发送的数据格式。
伺服系统返回的数据格式如下:
上图方框中的数据格式是伺服驱动器接收读取命令后返回的参数值
DMA機電知識庫
第6頁 共7 頁
内容格式,通过HMI宏指令Getchar接收的数据格式。
通讯数据校验码计算算法如下图所示:
结合此案例,我们想读取伺服速度值,参数地址为0003,那么发送
的字符串为R000315,后两位校验码15=(52H+30H+30H+30H+33H)的低
8位。
对于驱动器通讯返回的数据按照上面的协议换算后即可得出运转速
度,注意数据对应关系4000H对应3000rpm。
完整的通讯Clock宏指令程序如下所示:
$100=3052H
$101=3030H
$102=0033H
$110 = $100 && 00ffH
$111 = $100 && FF00H
$112 = $101 && 00ffH
$113 = $101 && ff00H
$114 = $102 && 00ffH
$115 = $111 >> 8
$116 = $113 >> 8
$120=$110
$121=$115
$122=$112
$123=$116
$124=$114
$130 = ADDSUMW($120, 5)
$131 = $130 && 00ffH
$140 = TOASC($131)
$150 = $142 << 8
$103 = $102 | $150
$160=$100
$161=$101
$162=$103
DMA機電知識庫
第7頁 共7 頁
$163=$143
SELECTCOM(1)
$20 = PUTCHARS($160, 7, 500)
delay(200)
$21 = GETCHARS($200, 7, 500)
delay(200)
$210 = $200 && ff00H
$211 = $201 && 00ffH
$212 = $201 && ff00H
$213 = $202 && 00ffH
$214 = $210 >> 8
$215= $211
$216 = $212 >> 8
$217= $213
$220 = TOHEX($214)
IF $220 > 4000H THEN GOTO LABEL 1
IF $220 <= 4000H THEN GOTO LABEL 2
label 1
$224=ffffH-$220
$230 = $224 * 3000 (DW)
$232 = $230 / 16384 (DW)
end
label 2
$230 = $220 * 3000 (DW)
$232 = $230 / 16384 (DW)
$232 = $232 * -1 (Signed DW)
end
【结束语】
根据客户的实际需要,应用台达HMI强大的宏指令自由协议通讯编
程功能,实现了HMI读取伺服运转速度参数值,以此类推,还可以读取
或者设定伺服其他参数值。对于非标准Modbus通讯协议的其他各种控制
器均可以利用宏指令程序进行通讯连接,此案例体现台达HMI灵活的宏
指令变成通讯技术应用特点,满足非标准通讯协议设备的通讯连接。