基于DSP的智能座椅系统的设计
童文骏
武汉理工大学信息工程学院,武汉(430070)
E-mail:bar98@https://www.doczj.com/doc/be11073311.html,
摘要:文章首先介绍了DSP控制系统的工作原理,因为DSP控制芯片的运算速度快,实现简单,控制效果良好,所以得到了广泛的运用。讲述了CAN总线在车载网络中的运用,阐述了利用uC/OS-II的任务调度机制,管理各个任务,使之适合车用实时性操作系统的要求。
关键词:DSP,uC/OS—II,任务调度机制,无刷电机
1 引言
随着汽车工业的飞速发展,电子技术在汽车上的应用比例不断增加。嵌入式系统与车载电子的结合使得车内系统的操作更加方便和智能化。座椅是汽车内的一个重要组成部分,座椅的功能直接影响到乘坐者的安全和舒适度。大部分汽车的座椅是固定的不可调的,局限了车内的空间。本文所阐述的智能座椅,扩充了座椅的功能,利用DSP控制芯片完成多节点控制,结合uC/OS—II实时操作系统和CAN总线,完成各功能之间的调度和传输工作。实现车内座椅的智能化控制。
2 车内智能座椅的功能
(1)座椅方向的调节:是由以下几种调节机构来完成的:座椅调角器、座椅导轨和座椅升降机构。在每种调节机构上,座椅都能完成两个,或两个以上方向的调节。现代汽车座椅,必须满足调整便利性和舒适性两大要求。也就是说驾驶者通过调节操纵,可以将座椅调整到最佳的位置上,以获得最好视野,得到易于操纵方向盘、踏板、变速杆等操纵件的便利,还可以获得最舒适和最习惯的乘坐角度。
(2)座椅记忆功能:将电动座椅与车载电脑结合在一起,就可增加座椅的记忆功能,对座椅给中信息参数实现智能化管理。例如,前者调好的座椅状态,后者使用时为确保舒适进行重新调整,这时电脑会将前者调节参数存储保存,当前者重新乘坐时,只需要按动一个键钮,便轻松获得以前存储的适合个人需要的设定。一般有两到四个记忆组数。
(3)座椅按摩功能:座椅内加入气动装置,气压由发动机舱的气泵提供,座椅靠背内分别有4个或多个气压腔,实现对腰椎部的保护。这些气压腔中放置气压传感器,采集气压数据。传感器将所捕获的信息发送到中央控制单元,中央控制单元根据事先编写的程序改变气压腔内的压力,使座椅椅面随之运动,达到为驾乘人员按摩的目的。具有按摩功能的座椅能够为辛勤工作了一天或是长时间驾车的人们缓解疲劳。
(4)座椅通风功能用风扇向座椅内内注入空气,空气从椅面上的小孔中流出,实现通风功能。乘客坐在座椅上时,身体后部与椅面紧密接触,接触部分空气不流通,不利于汗液的排除,会使人体感到不舒服。通风功能有效改善了人体与椅面接触部分的空气流通环境,即使长时间乘坐,身体于座椅的接触面也会干爽舒适。
(5)后排座放倒比例后排座放倒比例指后排座椅能够放倒的幅度。一般由于行李相容积有限,许多车型都提供可以放倒的后座椅,以增加行李厢的容积。不同的车型有不同的放倒比例。一般商务车座椅放到比例较大,很多可以100%放倒座椅。
3 嵌入式系统及其座椅解决方案
3.1嵌入式系统概述
嵌入式系统是一种新型的具有特殊结构的计算机系统,它将计算机或单片机嵌入至应用系统中,是信息技术的最终产品,具有以下功能:①通常执行特定功能;②以微电脑与外因构成核心;③严格的时序与稳定性要求;④全自动操作循环。可见嵌入式系统是电脑软件与硬件的综合体,亦可涵盖机械或其他的附属装置,整个综合体设计的目的在于满足某种特殊功能。它早期应用于军事和航空领域,现在已经广泛应用于工业控制、通信、仪器仪表和信息家电等消费领域。嵌入式系统的架构大体上可分为如下的5个部分:处理器、内存、输入与输出、操作系统与应用软件,[4]如图1所示。
图1 嵌入式系统结构
嵌入式系统另外可以分为硬件及其软件两部分,其中硬件的设计包括CPU控制电路的设计、网络功能设计、无线通信设计及使用接口等;嵌入式软件为信息、通信网络以及消费性电子等产品系统中的必备软件、专门硬件产品的驱动、控制处理或基本接口功能,以提升硬件产品的价值,为该硬件产品不可获缺的重要部分,它常以韧件形式,如控制器或驱动程序方式呈现。
3.2系统硬件设计
硬件电路由角度调节器,位置传感器,DSP,CAN总线控制器,功放电路,电机控制电路,供电系统。
DSP 芯片的选择,在TI公司的众多DSP控制芯片中,TMS2000系列是作测控应用的最佳16位定点DSP,速度为40MHZ,其主流产品为两个系列:C20X和C24X。C20系列可用于电话等通信设备、数字相机、嵌入式家电设备等;C24X主要用于数字电机控制、电机控制、工业自动化、电力转换系统等。[3]
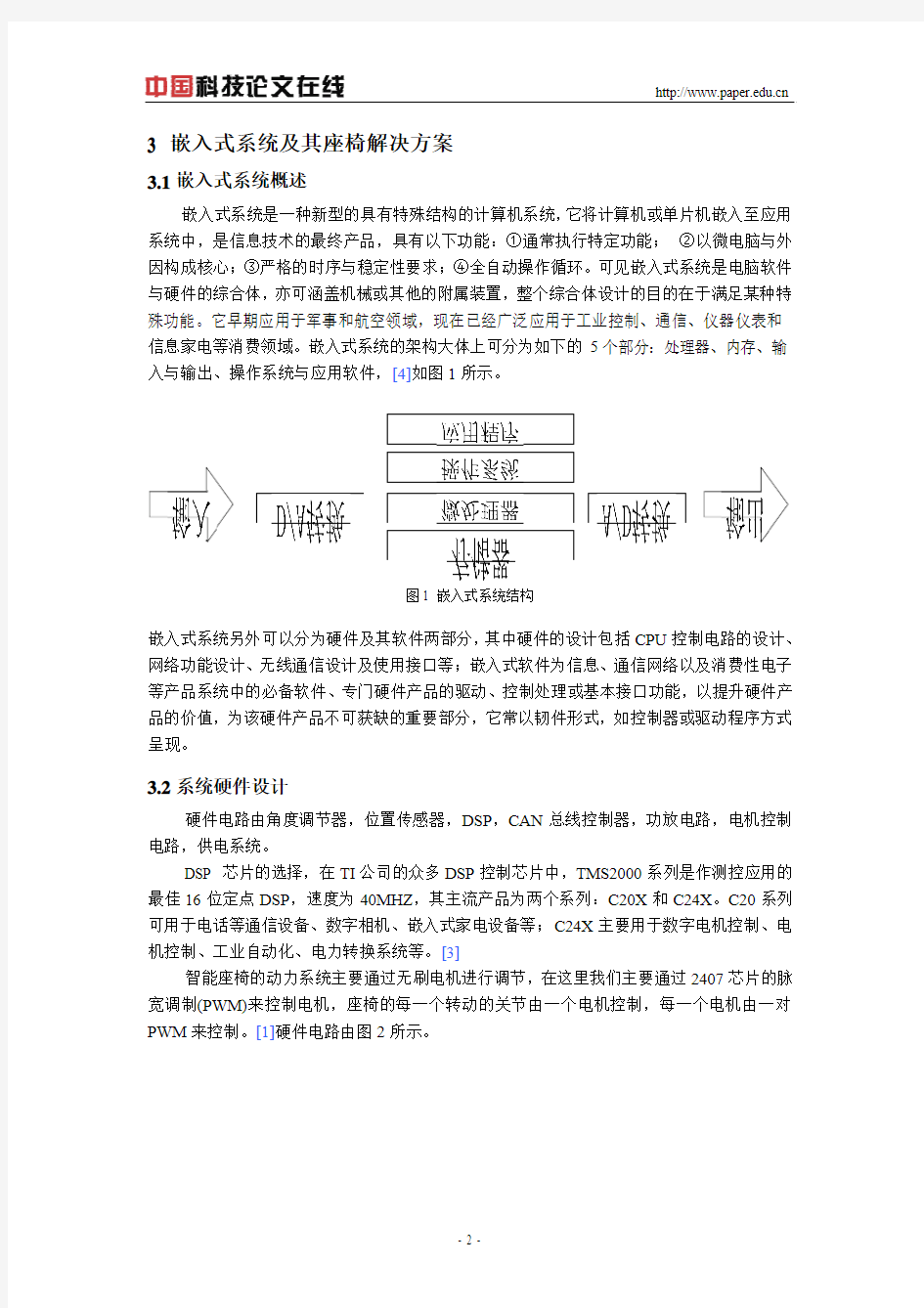
智能座椅的动力系统主要通过无刷电机进行调节,在这里我们主要通过2407芯片的脉宽调制(PWM)来控制电机,座椅的每一个转动的关节由一个电机控制,每一个电机由一对PWM来控制。[1]硬件电路由图2所示。
图2 硬件系统组成
3个角度传感器的输出电压是0~5V,而2407内置有10个模数转换ADC,转换的参考电压为3.3V(可调,但是不能够大于3.3V) 要采集3路模拟信号到DSP就必须经过三路调理电路,使其在参考电压范围之内。在这里,调理电路很简单,只要采用分压电路就可以了,本系统用5.1k和l 0K电阻对输入电压模拟信号进行10/15.1分压(5x10/15.1约等于参考3.3伏)。[2]
CAN(Controller Urea Network)总线是德国Bosch公司从80年代初为解决现代汽车中众多的控制与测试仪之问的数据交换而开发的一种串行数据通信协议,位速率高达1Mhps。CAN的应用范围遍及从高速网络到低成本的多线路网络,在自动化电子领域的汽车发动机控制部件、传感器、抗滑系统等中应用,特别在液压实时控制系统中是最广泛使用的一种总线。
3.3系统软件设计
系统采用嵌入式操作系统uC/OS-II。[5]uC/OS-II是一个实时多任务的嵌入式操作系统,它采用可剥夺刑内核。所有的任务都有优先级,多任务之间优先级高的可以中断正在执行的低优先级的任务而先执行。它的特点主要有:公开源代码、可移植性、可固化、可裁减、支持多任务、具有可确定性等。uC/OS- II是基于优先级抢断式的实时多任务操作系统,包含了实时内核、任务管理、时问管理、任务问通信同步(信号量、邮箱、消息队列)和内存管理等功能。基于uC/OS-II的应用系统工作时,首先进行操作系统初始化,主要完成任务控制块(TCB)初始化、TCB优先级表初始化、空任务的创建等;然后开始创建新任务,并可以在新创建的任务中再创建其他的新任务;最后调用OSSTART( )函数启动多任务调动。本系统根据实际需要设计了11个任务。
3.3.1系统多任务的功能,优先级设计
INTTask0任务:
它的优先级是0(优先级最高,值越大优先级越小),功能主要是系统初始化。设置系统时钟;禁止所有中断;清除全部中断标志,执行完后便删除该仟务。
SHUTTaskl任务:
优先级1,关机任务等待手柄按钮按下任务10发信号量后执行。
STARTTask2任务:
优先级2。功能:创建其他任务。紧急制动任务(优先级3),采集任务(优先级4),记忆任务(优先级6),角度调节任务(优先级6),高度调节任务(优先级7),前后移动任务(优先级8),后排座椅放倒任务(优先级9),人工操作任务(优先级10)
JINGJITast紧急制动任务:
功能:取消所有的其他任务操作。
CAIJITask采集任务:
功能:AD采集任务,每50毫秒定时中断采集一次,采集输入量总共三路为:座椅方向角度,座椅靠背角度,头枕角度。工作装置机器人化各关节角度变化范围:方向角度:0<< α<<180
头枕角度:45<<β<<135
靠背角度:90<<γ<<180
REMTast记忆任务:
功能:系统一共可以记忆4组乘客的身体数据来确定座椅的参数,被记忆了数据参数的乘客只要按一个按钮就可以调出符合自身标准的座椅数据。
DIRTast方向角度调节任务,HIGTast高度调节任务,FBTast前后移动任务:功能:根据当前采集的AD量和目标位置量比较,采用PID算法控制小不同占空比的PWM波,实现角度调节动作,由于存在当前位置不在目标起始位置所以必须采用直线插值或者三次多项式插值实时规划运动轨迹上的点,然后采用逆运动学算法,得到各个角度目标系列值,依次做完各个动作。等待人工操作任务(优先级10)按下功能键后发信号量来触发这些任务的执行。
DAOTast座椅放倒任务:
他的实现方法类似于角度调节任务的实现,只是动作系列不一样。
PEOPTast人工操作任务:
优先级10,人工操作任务,工作开始接收CAN控制按钮发来的运动控制电信号,发相应的PWM控制,座椅正常动作,当接收到功能按键时,便发信号量。此时程序便跳转到相应的特殊功能任务中去。等执行完相应的特殊功能任务后,程序自动回到人工操作工作任务。
各个任务控制一个系统功能,并且由操作系统内核进行统一调度,实现系统功能,任务关系由图3所示:
图3 任务间关系
4 结论
经过调试,证明基于uC/OS-II的智能化系统工作稳定,可靠性和实时性都达到了预定的要求。DSP的高运行速度使得控制的反映速度得到提高。增加了可控性,整体结构简单。实现了车内座椅的智能化。
参考文献
[1]TMS240在电机控制中的运用黄望军宋强(湖南工程学院电器与信息工程系)
《电机电器技术》2003年第4期
[2] 王晓明,王玲,电动机的DSP控制-TI公司DSP应用。北京:北京航空航天大学出版社,2005。
[3]韩安太,刘峙飞,黄海,DSP控制器原理及其在运统中的应用。北京:清华大学出版社,2003。
[4] 刘和平,严利平,张学锋等。TMS320LF240x DSP结构,原理及应用。北京航空航天大学出版社,2002
[5]《嵌入式实时操作系统uC/OS—II》[美] Jean https://www.doczj.com/doc/be11073311.html,brosse著邵贝贝等译。北京航空航天大学出版社
Designed of intelligence chair base on DSP
Tong Wenjun
School of Information Engineering,Wuhan University of Technology,Wuhan (430070)
Abstract
This paper introduce the principle of DSP control system firstly,because of it has hight calaculate speed and has a good effection,it used in a lot of field. The paper also illustrate the CAN used in motorcar system..According to the schedule of uC/OS-II to control every task,make them fit for the real time of motorcar.
Keywords:DSP,uC/OS—II,Schedule,Bushless Electromotor
作者简介:童文骏,男,1983年生,硕士研究生,主要研究方向是智能控制、基于网络环境下的智能控制。