实验一 一、二阶系统的电子模拟 及时域响应的动态测试
一、 实验目的
1、 了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系。
2、 学习在电子模拟机上建立典型环节系统模型的方法。
3、 学习阶跃响应的测试方法。 二、 实验内容
1、 建立一阶系统的电子模型,观测并记录在不同时间常数T 时的阶跃响应曲线,并测定其过渡过程时间Ts 。
2、
建立二阶系统的电子模型,观测并记录在不同阻尼比时的阶跃响应曲线,并测定其超调量及过渡过程时间。
三、实验原理
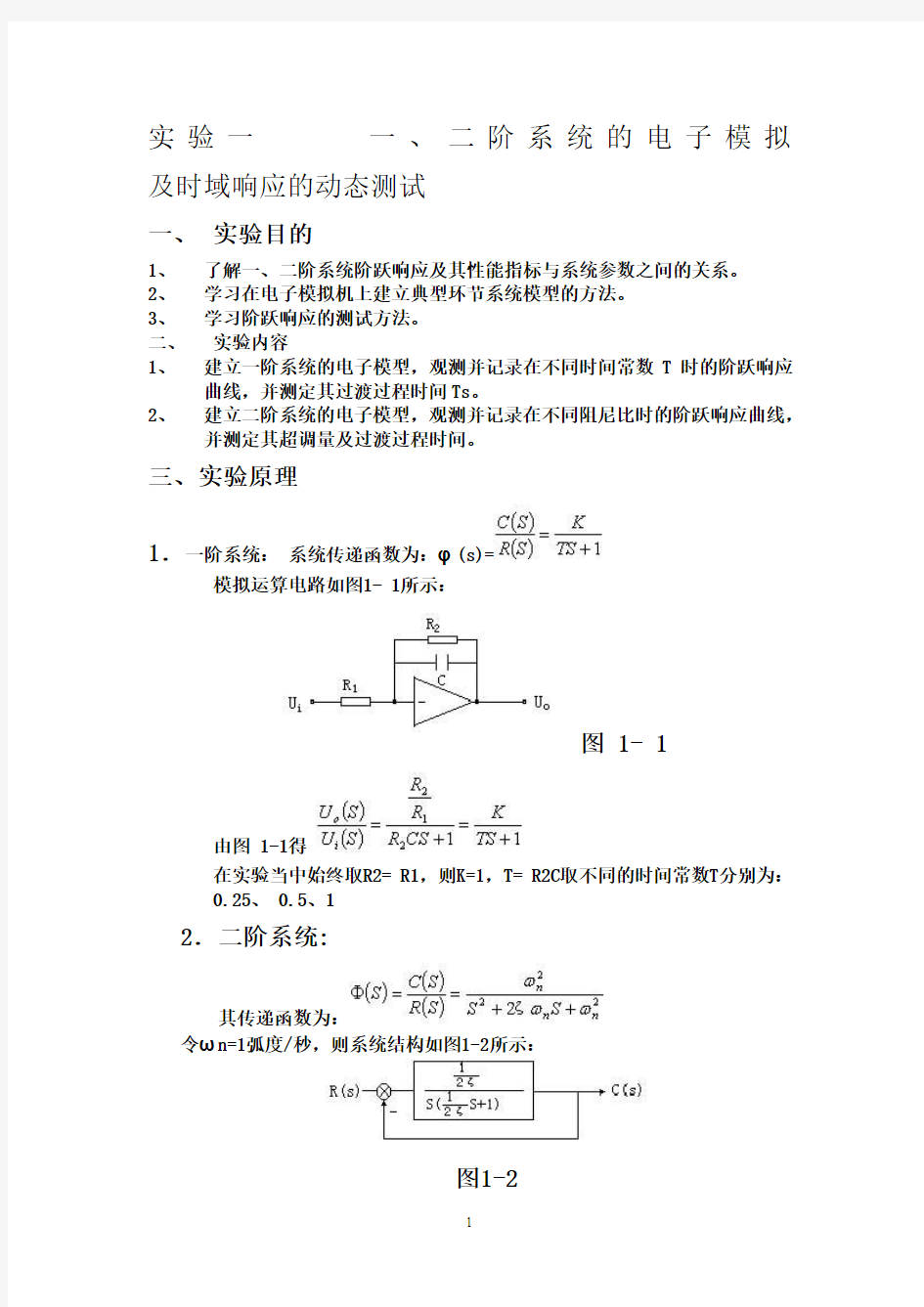
1.一阶系统: 系统传递函数为:φ(s)=
模拟运算电路如图1- 1
所示:
图 1- 1
由图 1-1得
在实验当中始终取R2= R1,则K=1,T= R2C 取不同的时间常数T 分别为: 0.25、 0.5、1
2.二阶系统:
其传递函数为:
令ωn=1弧度/秒,则系统结构如图1-2
所示:
图1-2
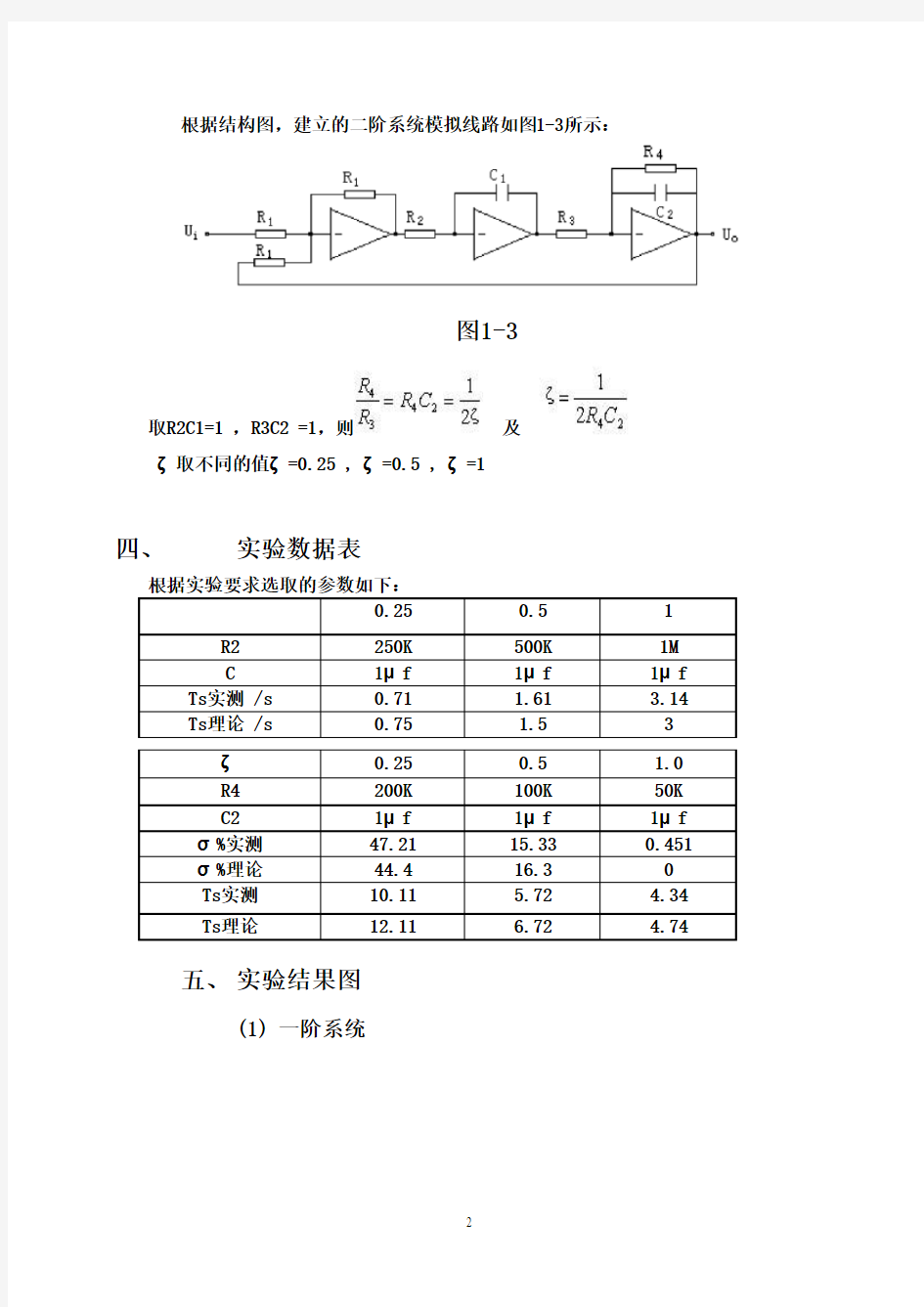
根据结构图,建立的二阶系统模拟线路如图1-3
所示:
图1-3
取R2C1=1 ,R3C2 =1,则
及
ζ取不同的值ζ=0.25 , ζ=0.5 , ζ=1
四、
实验数据表
根据实验要求选取的参数如下:
0.25
0.5 1 R2 250K 500K 1M C 1μf 1μf 1μf Ts 实测 /s 0.71 1.61 3.14 Ts 理论 /s
0.75 1.5 3
五、 实验结果图
(1) 一阶系统
ζ 0.25 0.5 1.0 R4 200K 100K 50K C2 1μf 1μf 1μf σ%实测 47.21 15.33 0.451 σ%理论 44.4 16.3 0 Ts 实测 10.11 5.72 4.34 Ts 理论
12.11
6.72
4.74
(2)二阶系统
六、数据分析
实验数据结果与理论数据有一些差别,大概原因在于AD的测量误差造成的;其次二阶的精确计算较困难,所以实际值与理论值有困难。
实验二频率响应测试
一、实验目的
1.掌握频率特性的测试原理及方法。
2.学习根据所测定出的系统的频率特性,确定系统传递函数的方法。
二、实验内容
3.测定给定环节的频率特性。
4.系统模拟电路图及系统结构图分别如图2-1及图2-2。
5.系统传递函数为:
取R=200KΩ,则
取R=500KΩ,则
若正弦输入信号为Ui(t)=A1Sin(ωt),则当输出达到稳态时,其输出信号为
Uo(t)=A2Sin(ωt+ψ)。改变输入信号频率值,便可测得二组A1/A2和ψ随f(或ω)变化的数值,这个变化规律就是系统的幅频特性和相频特性。
三、实验原理
1. 幅频特性即测量输入与输出信号幅值A1及A2,然后计算其比值A2/A1。
2. 实验采用“李沙育图形”法进行相频特性的测试。以下简单介绍一下这种测试方法的原理。
设有两个正弦信号: X(ωt)=XmSin(ωt) Y(ωt)=YmSin(ωt+ψ)
若以X(t)为横轴,Y(t)为纵轴,而以ω作为参变量,则随着ωt的变化,X(t)和Y(t)所确定的点的轨迹,将在X-Y平面上描绘出一条封闭的曲线。这个图形就是物理学上成称为的“李萨如图形”。
3. 相位差角Ψ的求法:
对于X(ωt)=XmSin(ωt)及Y(ωt)= YmSin(ωt)
当ωt=0时,有 X(0)=0 ;Y(0)=Ym Sin(ψ)
即ψ=ArcSin(Y(0)/ Ym), 0≤ψ≤π/2时成立。
四、实验数据表
R = 100K
○1○2○3○4○5
f 1.59 2.23 1.59 2.86 4.14
ω10 14 18 20 22 Ac/Ar 1.06 0.70 0.432 0.222 0.1563 Ym/Yo 0.943 0.886 0.768 0.701 0.688 ψ0.48π0.41π0.38π0.31π0.20π
五、R = 200K
○1○2○3○4○5
f 1.59 2.23 2.86 3.50 4.14
ω10 14 18 22 26 Ac/Ar 1.436 1.416 0.964 0.5518 0.3662 Ym/Yo 0.642 0.994 0.795 0.623 0.424 ψ0.22π0.47π0.30π0.21π0.15π
六、实验结果图
R=100K
R=200K
六、数据分析
从实验结果图可以看出结果,R=100K的初始取值有点大,实际测量与理论相差不大,误差主要出现在A和Y的测量。
实验三控制系统串联校正
一、实验目的
1、了解和掌握串联校正的分析和设计方法。
2、研究串联校正环节对系统稳定性及过渡过程的影响。
二、实验内容
1、设计串联超前校正,并验证。
2. 设计串联滞后校正,并验证。
三、实验原理
其中Gc(s)为校正环节,可放置在系统模型中来实现,也可使用模拟电路的方式由模拟机实现。
3.未加校正时,。
4.加串联超前校正时,,
给定,则。
5.加串联滞后校正时,
给定,则。
四、实验数据
1.未加校正σ%=45.07 ts=6.007
2.加超前校正σ%=21.988 ts=2.406
3.加滞后校正:σ%=19.46 ts=1
4.55
五、实验结果图
(1)未校正
(2)超前校正
六、数据分析
时域角度,超前和滞后都减少了系统的超调量,使得过渡过程变得较为平稳。滞后校正增加了系统的调节时间,过渡过程变慢,系统响应变得迟钝;超前校正减少了调节时间,过渡过程变快,系统响应变得迅速。
从频域角度看,超前校正和滞后校正都增大了系统的相稳定裕度,系统稳定性增强。
实验四控制系统数字仿真
一、K值的求解
1、系统根轨迹图
2、用二阶系统估算K值
超调量计算:σ% =
ζ对应的阻尼线角度:β= arcosζ
阻尼线与根轨迹交点坐标:
K值求解:K =
σ% 5 25 50
ζ0.690 0.404 0.215
β46.4°66.2°77.6°
-1.39+1.50j -1.16 + 2.42j -0.78 + 3.35i K 31.34 55.23 99.94
二、阶跃响应曲线
(1)T s=3 σ%=5
实际σ%=5
(2)T s=3.25 σ%=25 实际σ%=3.25
(3)T s=4.98 σ%=50 实际σ%=44
第一章Matlab 基本运算 [范例1-2] 建立矩阵A={7 8 9},B={7 8 9} >> A=[7,8,9] A = 7 8 9 >> B=A' B = 7 8 9 (2) >> B=[1 1 2 ; 3 5 8 ; 10 12 15] B= 1 1 2 3 5 8 10 12 15 (3) >> a=1:1:10 a = 1 2 3 4 5 6 7 8 9 10 >> t=10:-1:1
t = 10 9 8 7 6 5 4 3 2 1 [范例1-3]求多项式D(S)=(5S^2+3)(S+1)(S-1)的展开式 >> D=conv([5 0 3],conv([1 1],[1 -2])) D = 5 -5 -7 -3 -6 [范例1-4]求多项式P(X)=2X^4-5X^3-X+9 (1) >> P=[2 -5 6 -1 9] P = 2 -5 6 -1 9 >> x=roots(P) x = 1.6024 + 1.2709i 1.6024 - 1.2709i -0.3524 + 0.9755i -0.3524 - 0.9755i 第二章控制系统的数学模型 [范例2-1]已知系统传递函数G(S)= s + 3/ s^3 + 2 s^2 + 2 s + 1 >> num=[0 1 3]; >> den=[1 2 2 1]; >> printsys(num,den) num/den = s + 3 --------------------- s^3 + 2 s^2 + 2 s + 1 [范例2-2]已知系统传递函数G(S)=【5*(S+2)^2(S^2+6S+7)】/S(S+1)^3(S^3+2S+1)],试
欲索取更多考研资料,请上北京天问教育网站官网! 自动控制原理综合 自动化科学与电气工程学院 2007年11月
931自动控制原理综合考试大纲(2008版) 一、考试组成 自动控制原理占90分; 理论力学占60分; 二、自动控制原理部分的考试大纲 (一)复习内容及基本要求 1.自动控制的一般概念 主要内容:自动控制的任务;基本控制方式:开环、闭环(反馈)控制;自动控制的性能要求:稳、快、准。 基本要求:反馈控制原理与动态过程的概念;由给定物理系统建原理方块图。 2.数学模型 主要内容:传递函数及动态结构图;典型环节的传递函数;结构图的等效变换、梅逊公式。 基本要求:典型环节的传递函数;闭环系统动态结构图的绘制;结构图的等效变换。 3.时域分析法 主要内容:典型响应及性能指标、一、二阶系统的分析与计算。系统稳定性的分析与计算:劳斯、古尔维茨判据。稳态误差的计算及一般规律。 基本要求:典型响应(以一、二系统的阶跃响应为主)及性能指标计算;系统参数对响应的影响;劳斯、古尔维茨判据的应用;系统稳态误差、终值定理的使用条件。 4.根轨迹法 主要内容:根轨迹的概念与根轨迹方程;根轨迹的绘制法则;广义根轨迹;零、极点分布与阶跃响应性能的关系;主导极点与偶极子。 基本要求:根轨迹法则(法则证明只需一般了解)及根轨迹的绘制;主导极点、偶极子等的概念;利用根轨迹估算阶跃响应的性能指标。 5.频率响应法 主要内容:线性系统的频率响应;典型环节的频率响应及开环频率响应;Nyquist稳定判据和对数频率稳定判据;稳定裕度及计算;闭环幅频与阶跃响应的关系,峰值及频宽的概念;开环频率响应与阶跃响应的关系,三频段(低频段,中频段和高频段)的分析方法。 基本要求:典型环节和开环系统频率响应曲线(Nyquist曲线和对数幅频、相频曲线)的绘制;系统稳定性判据(Nyquist判据和对数判据);等M、等N圆图,尼柯尔斯图仅作一般了解;相稳定裕度和模稳定裕度的计算;明确最小相位和非最小相位系统的差别,明确截止频率和带宽的概念。 6.线性系统的校正方法 主要内容:系统设计问题概述;串联校正特性及作用:超前、滞后及PID;校正设计的频率法及根轨迹法;反馈校正的作用及计算要点;复合校正原理及其实现。 基本要求:校正装置的作用及频率法的应用;以串联校正为主,反馈校正为辅;以频率法为主,根轨迹法为辅;复合校正的应用。 7.线性连续系统的状态空间分析方法
倒立摆控制系统控制器设计实验报告
成员:陈乾睿 2220150423 郑文 2220150493 学院:自动化 倒立摆控制系统控制器设计实验 一、实验目的和要求 1、目的 (1)通过本设计实验,加强对经典控制方法(LQR控制器、PID控制器)和智能控制方法(神经网络、模糊控制、遗传算法等)在实际控制系统中的应用研究。(2)提高学生有关控制系统控制器的程序设计、仿真和实际运行能力. (3)熟悉MATLAB语言以及在控制系统设计中的应用。 2、要求 (1)完成倒立摆控制系统的开环系统仿真、控制器的设计与仿真以及实际运行结果 (2)认真理解设计内容,独立完成实验报告,实验报告要求:设计题目,设计的具体内容及实验运行结果,实验结果分析、个人收获和不足,参考资料。程序
清单文件。 二、实验内容 倒立摆控制系统是一个典型的非线性系统,其执行机构具有很多非线性,包括:死区、电机和带轮的传动非线性等。 本设计实验的主要内容是设计一个稳定的控制系统,其核心是设计控制器,并在MATLAB/SIMULINK环境下进行仿真实验,并在倒立摆控制实验平台上实际验证。 算法要求:使用LQR以外的其它控制算法。 三、倒立摆系统介绍 倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的应用开发前景。 倒立摆的形式和结构各异,但所有的倒立摆都具有以下的特性:非线性,不确定性,耦合性,开环不稳定性,约束限制。 经过相关论文和文献的查询,我们决定采用模糊控制的方法进行倒立摆的控制。
自控元件复习提纲 一、关于考试(从学长处获得信息,仅供大家参考): 1、简答:eg:1)、为什么空载实验可以测r m ,x m? 2)、变压器中是否必须有无功功率? 2、论述:eg:1)、变压器工作原理。 2)、电机基本特点。 论述时必要时要作图说明。如要论述两相伺服电机为何有无自转特性时应该作出单相工作时两相伺服电机的机械特性曲线来说明。 3、计算:两个计算,一个直流,一个交流。 二、各章重点内容概述(参考往届笔记): 第1章直流磁路及其计算 重点章节:1-1,1-2,1-3 磁路总是闭合的;磁路计算的正反两类任务;等效磁路的画法第2章直流电磁铁及其典型应用 重点章节:2-1,2-2,另外第三节中的继电器的主要技术指标大家也要注意第3章直流电机的一般问题 重点章节:3-1,3-2,3-4,3-5,3-6 发电机、电动机的识别,电角的概念,电枢反应的概念,直流电机的电枢电动 势和电磁转矩的计算方法,直流电机的电势平衡关系、转矩平衡关系、功率平 衡关系,电枢绕组的具体原理如果不明白大家不必深究,只要知道概念就可以, 这里不是重点。 PS:本章是比较重要的一章,计算题可能出在这一章。 第4章直流测速发电机和直流伺服电动机 重点章节:4-1,4-2 第三节要掌握直流力矩电动机的特点,知道其应用场合以 及为什么要用在这些场合。 准确理解直流伺服电动机的工作原理、四种工作状态,准确掌握直流测速发电 机和直流伺服电动机的工作原理及特性(输入、输出等) 第5章变压器 重点章节:5-2,5-3,5-4,5-5,5-6 空载电压平衡式和等效电路及相量图,负载运行的电压平衡式和磁动势平衡式 及相量图和等效电路P101的图5-12大家仔细看。参数、额定数据和特性。磁 场问题转化到电路问题。 第6章异步电动机 重点章节:6-1,6-3,6-4,6-5 转差率S,功率传递,相电动势,第三节可能考计算,注意一下习题中的最后 两道计算题6.12,6.15 另外,第六章和第五章联系很紧密,大家可以结合起来复习效果更好。 第7章两相电机 重点章节:7-1,7-2 分解磁场,无自转的分析,稳定运行范围大,第一节的第(四)部分其它大家 可以不用管。异步测速发电机的输出电压的特点,原理,频率与转速无关,只 与电源有关。 第8章同步电动机
实验一字符串排序 实验时间:2015.11.21 实验编号:同组同学:无一、实验背景 本实验可以实现对任意长度字符串的进行从小到大的排序并回显到屏幕上。 二、实验原理 本实验的采用的实验原理主要是冒泡法 原理图如下: 三、预习思考题的实验验证分析 预习思考题的实验分析验证(包括程序代码以及程序的执行结果)已经在预习报告中做出回答,在此不再进行赘述。 四、实验过程与结果 1、实验过程:(1)双击计算机桌面上的TPC-2003实验系统配套的软件;
(2)新建一个源程序,在当前运行环境下,选择菜单栏中的“文件”菜单,菜单下拉后选择“新建”,会弹出新建窗口,选择新建表单中的“ASM”,点击“确定”,新建汇编程序; (2)根据题目要求设计程序,并将其输入到软件界面上; (3)保存新建的源程序; (4)点击“汇编”的快捷键,编译调试窗口中显示出汇编结果,程序没有错误; (5)打开命令提示符操作界面,将生成的可执行文件拖入到其中,回车即可运行该程序; (6)对程序是否达到实验要求进行实验验证。 2、实验结果:本实验达到了以下要求 1、利用INT 21H的1号功能,从键盘输入任意长度的字符串,以回车符结束; 2、将输入的字符串存放在数据段中; 3、对输入的字符串按ASCII码从小到大排序(ASCII小者占低地址存放); 4、将排好序的字符串利用INT 21H的9号功能显示在微机屏幕上。 实验程序如下: STACK SEGMENT STACK DB 100 DUP(?) STACK ENDS DATA SEGMENT STR DB 100 DUP(?) DATA ENDS CODE SEGMENT ASSUME CS:CODE,DS:DATA,SS:STACK MAIN PROC MOV AX,DATA MOV DS,AX MOV SI,OFFSET STR
成绩 北京航空航天大学 自动控制原理实验报告 学院机械工程及自动化学院 专业方向机械工程及自动化 班级 学号 学生姓名刘帆 自动控制与测试教学实验中心
实验一 一、二阶系统的电子模拟及时域响应的动态测试 实验时间2014年11月15日 实验编号 同组同学 一、实验目的 1、 了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系。 2、 学习在电子模拟机上建立典型环节系统模型的方法。 3、 学习阶跃响应的测试方法。 二、实验内容 1、 建立一阶系统的电子模型,观测并记录在不同时间常数T 时的跃响应曲线,并测定其过渡过程时间T s 。 2、 建立二阶系统的电子模型,观测并记录在不同阻尼比ζ时的跃响应曲线,并测定其超调量σ%及过渡过程时间T s 。 三、实验原理 1、一阶系统阶跃响应性能指标的测试 系统的传递函数为:()s ()1 C s K R s Ts φ=+()= 模拟运算电路如下图 : 其中2 1 R K R = ,2T R C =;在实验中,始终保持21,R R =即1K =,通过调节2R 和C 的不同取值,使得T 的值分别为0.2,0.51,1.0。记录实验数据,测量过度过程的性能指标,其中取正负5%误差带,按照经验公式取3s t T =
2、二阶系统阶跃响应性能指标的测试 系 统 传递函数为: 令ωn=1弧度/秒,则系统结构如下图: 二阶系统的 模拟电路图如下: 在实验过程中,取22321,1R C R C ==,则 442312R R C R ζ==,即42 12R C ζ=;在实验当中取123121,1R R R M C C F μ===Ω==,通过调整4R 取不同的值,使得ζ分别为0.25,0.5,0.707,1;记录所测得的实验数据以及其性能指标,取正负5%误差 带,其中当ζ<1时经验公式为2 1 3.5 %100%,s n e t ζσζω- -=?= ,当ζ=1时经验公式 为n 4.75 ts ω= 四、试验设备: 1、HHMN-1型电子模拟机一台。 2、PC 机一台。 3、数字万用表一块。 4、导线若干。
倒立摆实验报告 机自82 组员:李宗泽 李航 刘凯 付荣
倒立摆与自动控制原理实验 一.实验目的: 1.运用经典控制理论控制直线一级倒立摆,包括实际系统模型的建立、根轨迹分析和控制器设计、频率响应分析、PID 控制分析等内容. 2.运用现代控制理论中的线性最优控制LQR 方法实验控制倒立摆 3.学习运用模糊控制理论控制倒立摆系统 4.学习MATLAB工具软件在控制工程中的应用 5.掌握对实际系统进行建模的方法,熟悉利用MATLAB 对系统模型进行仿真,利用学习的控制理论对系统进行控制器的设计,并对系统进行实际控制实验,对实验结果进行观察和分析,非常直观的感受控制器的控制作用。 二. 实验设备 计算机及等相关软件 固高倒立摆系统的软件 固高一级直线倒立摆系统,包括运动卡和倒立摆实物 倒立摆相关安装工具 三.倒立摆系统介绍 倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种
技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的利用开发前景。 倒立摆已经由原来的直线一级倒立摆扩展出很多种类,典型的有直线倒立摆环形倒立摆,平面倒立摆和复合倒立摆等,本次实验采用的是直线一级倒立摆。 倒立摆的形式和结构各异,但所有的倒立摆都具有以下的特性: 1) 非线性2) 不确定性3) 耦合性4) 开环不稳定性5) 约束限制 倒立摆控制器的设计是倒立摆系统的核心内容,因为倒立摆是一个绝对不稳定的系统,为使其保持稳定并且可以承受一定的干扰,需要给系统设计控制器,本小组采用的控制方法有:PID 控制、双PID 控制、LQR控制、模糊PID控制、纯模糊控制 四.直线一级倒立摆的物理模型: 系统建模可以分为两种:机理建模和实验建模。实验建模就是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励
《电气工程专业考研专业课初试科目及复试内容汇总》 自动化专业的考研方向 自动化专业方向很广,考的时候还分双控,模式,电力电机等等方面,你可以参看学校是否在这个方面有无国家重点实验室,是不是国家重点学科来比较。 1. 清华, 2.中科院, 3.上海交大, 4.浙大,5华工,北航,东南,东北大学,西安交大,哈 尔滨工业大学,中国科技大学,华北电力,天津大学,东南大学,华中科技,武汉大学天津大学自动化 一般说来,初试的分数是最重要的,特别是考外校。当然,你的动手能力也是很重要的,还有你的英语口语,考研复试都是要考虑的。例如上海交大的复试,双控353的复试线,有380的被刷下来,就是英语口语已经专业课不是很扎实的。考外校的话依据学校而定是否要找导师 动手能力强,参加电子设计大赛都是作为你考研复试的参考,还是好好的准备初试的考试吧,毕竟它是个门槛。 【电气工程及其自动化】 北京工业大学 421自动控制原理 复试:1、电子技术2、计算机原理 北京航空航天大学 [双控] 432控制理论综合或433控制工程综合 [检测] 433控制工程综合或436检测技术综合 [系统] 431自动控制原理或451材料力学或841概率与数理统计 [模式] (自动化学院)433控制工程综合或436检测技术综合、(宇航学院)423信息类专业综合或431自动控制原理或461计算机专业综合 [导航] (自动化学院)432控制理论综合或433控制工程综合、(宇航学院)431自动控制原理 复试:无笔试。1) 外语口语与听力考核;2) 专业基础理论与知识考核;3) 大学阶段学习成绩、科研活动以及工作业绩考核;4) 综合素质与能力考核 北京化工大学 440电路原理 复试:综合1(含自动控制原理和过程控制系统及工程)、综合2(含自动检测技术装置和传感器原理及应用)、综合3(含信号与系统和数字信号处理) 注:数学可选择301数学一或666数学(单) 北京交通大学 [双控/检测]404控制理论 [模式]405通信系统原理或409数字信号处理 复试: [电子信息工程学院双控]常微分方程 [机械与电子控制工程学院检测]综合复试(单片机、自动控制原理) [计算机与信息技术学院模式] 信号与系统或操作系统
实验报告
实验四 8251可编程串行口与PC机通信实验一、实验要求 利用实验箱内的8251A芯片,实现与PC机的通信。 二、实验目的 1.掌握8251A芯片结构和编程方法; 2.了解实现串行通信的硬件环境,数据格式和数据交换协议; 3.了解PC机通信的基本要求。 三、实验原理 (一)8251A芯片工作方式配置: 1. 8个数据位; 2.无奇偶校验位; 3.1个停止位; 4.波特率因子设为16; 5. 波特率设为9600。 (二)8251A主要寄存器说明 图4-1 模式字 图4-2 命令字
CO MMAN D I NSTR UCT ION FO RMA T 图4-3 状态字 (三)8251编程 对8251 的编程就是对8251 的寄存器的操作,下面分别给出8251 的几个寄存器的格式。(1)方式控制字 方式控制字用来指定通信方式及其方式下的数据格式,具体各位的定义如图4-4所示。 图4-4 方式控制字说明 (2)命令控制字 命令控制字用于指定8251 进行某种操作(如发送、接收、内部复位和检测同步字符等)或处于某种工作状态,以便接收或发送数据。图4-5 所示的是8251 命令控制字各位的定义。 图4-5命令控制字说明 (3)状态字 CPU 通过状态字来了解8251 当前的工作状态,以决定下一步的操作,8251 的状态字如 图4-6所示。 图4-6 状态字说明 四、实验电路连接: 1.CS8251接228H,CS8279已固定接至238H; 2.扩展通信口18中的232RXD连8251RXD ,232TXD连8251TXD;
3.计算机的两个RS232通信口,一个连至仿真机通信口,一个连至扩展通信口18(所有通信口均为DB9)。注意:RS232通信口必须在设备断电状态下插拔! 图4-7 连线图 五、实验内容及要求 1. 将例程从PDF文档中导入到WMD86软件编辑环境中,调试通过。使用软件自带的示波器,观察Txd管脚的输出,验证结果的正确性。将结果截图保存,贴入实验报告。 2.剔除例程中冗余部分,实现对例程的精简和优化。将精简内容与相应理由写入实验报告。 3.将自己学号的后三位数字通过RS232端口的Txd管脚输出。使用软件自带的示波器,观察Txd管脚的输出,验证结果的正确性。将结果截图保存,贴入实验报告。 4.通过读状态寄存器的方法,获得发送移位寄存器是否为空的信息,实现学号后三位数字的循环发送。将结果截图保存,贴入实验报告。 5.给每帧数据间添加固定的时间间隔,时间间隔为10000个指令周期。将结果截图保存,
自动控制原理实验报告 一、实验名称:一、二阶系统的电子模拟及时域响应的动态测试 二、实验目的 1、了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系 2、学习在电子模拟机上建立典型环节系统模型的方法 3、学习阶跃响应的测试方法 三、实验内容 1、建立一阶系统的电子模型,观测并记录在不同时间常数T时的响应曲线,测定过渡过程时间T s 2、建立二阶系统电子模型,观测并记录不同阻尼比的响应曲线,并测定超调量及过渡过程时间T s 四、实验原理及实验数据 一阶系统 系统传递函数: 由电路图可得,取则K=1,T分别取:0.25, 0.5, 1 T 0.25 0.50 1.00 R2 0.25MΩ0.5M Ω1MΩ C 1μ1μ1μ T S 实测0.7930 1.5160 3.1050 T S 理论0.7473 1.4962 2.9927 阶跃响应曲线图1.1 图1.2 图1.3 误差计算与分析 (1)当T=0.25时,误差==6.12%; (2)当T=0.5时,误差==1.32%; (3)当T=1时,误差==3.58% 误差分析:由于T决定响应参数,而,在实验中R、C的取值上可能存在一定误差,另外,导线的连接上也存在一些误差以及干扰,使实验结果与理论值之间存在一定误差。但是本实验误差在较小范围内,响应曲线也反映了预期要求,所以本实验基本得到了预期结果。 实验结果说明 由本实验结果可看出,一阶系统阶跃响应是单调上升的指数曲线,特征有T确定,T越小,过度过程进行得越快,系统的快速性越好。 二阶系统 图1.1 图1.2 图1.3
系统传递函数: 令 二阶系统模拟线路 0.25 0.50 1.00 R4 210.5 C2 111 实测45.8% 16.9% 0.6% 理论44.5% 16.3% 0% T S实测13.9860 5.4895 4.8480 T S理论14.0065 5.3066 4.8243 阶跃响应曲线图2.1 图2.2 图2.3 注:T s理论根据matlab命令[os,ts,tr]=stepspecs(time,output,output(end),5)得出,否则误差较大。 误差计算及分析 1)当ξ=0.25时,超调量的相对误差= 调节时间的相对误差= 2)当ξ=0.5时,超调量的相对误差==3.7% 调节时间的相对误差==3.4% 4)当ξ=1时,超调量的绝对误差= 调节时间的相对误差==3.46% 误差分析:由于本试验中,用的参量比较多,有R1,R2,R3,R4;C1,C2;在它们的取值的实际调节中不免出现一些误差,误差再累加,导致最终结果出现了比较大的误差,另外,此实验用的导线要多一点,干扰和导线的传到误差也给实验结果造成了一定误差。但是在观察响应曲线方面,这些误差并不影响,这些曲线仍旧体现了它们本身应具有的特点,通过比较它们完全能够了解阶跃响应及其性能指标与系统参数之间的关系,不影响预期的效果。 实验结果说明 由本实验可以看出,当ωn一定时,超调量随着ξ的增加而减小,直到ξ达到某个值时没有了超调;而调节时间随ξ的增大,先减小,直到ξ达到某个值后又增大了。 经理论计算可知,当ξ=0.707时,调节时间最短,而此时的超调量也小于5%,此时的ξ为最佳阻尼比。此实验的ξ分布在0.707两侧,体现了超调量和调节时间随ξ的变化而变化的过程,达到了预期的效果。 图2.2 图2.1 图2.3
目录 一、倒立摆系统介绍 (2) 1.1倒立摆系统简介 (2) 1.2 倒立摆组成及其原理 (2) 1.3 倒立摆特性 (3) 二、一级倒立摆 (3) 2.1一级倒立摆建模 (3) 2.2 一级倒立摆控制方法 (11) 2.2.1 单输入—单输出控制方法 (11) 超前滞后控制方法 2.2.2 单输入—多输出控制方法 (22) 双PID控制方法 2.2.3 多输入—多输出控制方法 (30) 极点配置法 二次线性最优控制法 三、二级倒立摆 (36) 3.1二级倒立摆建模 (36) 3.2 二级倒立摆控制方法 (46) 3.2.1 二次线性最优控制法 (46) 3.2.2 基于融合技术的模糊控制法 (48) 四、总结 (60) 五、参考文献 (63)
一、倒立摆系统介绍 1.1倒立摆系统简介 倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。最初研究开始于二十世纪50 年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。近年来,新的控制方法不断出现,人们试图通过倒立摆这样一个典型的控制对象,检验新的控制方法是否有较强的处理多变量、非线性和绝对不稳定系统的能力,从而从中找出最优秀的控制方法。倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的利用开发前景。平面倒立摆可以比较真实模拟火箭的飞行控制和步行机器人的稳定控制等方面的研究。 1.2倒立摆组成及其原理 倒立摆的组成包括计算机、运动控制卡、伺服系统、倒立摆本体和光电码盘、反馈测量元件等几大部分,组成一个闭环系统。对于直线型倒立摆,可以根据伺服电机自带的码盘反馈通过换算获得小车的位移,小车的速度信号可以通过差分法得到;各个摆杆的角度由光电码盘测得并直接反馈到控制卡,速度信号可以通过差分方法得到。计算机从运动控制卡中实时读取数据,确定控制策略(电机的输出力矩),并发送给运动控制卡。运动控制卡经过DSP 内部的控制算法实现该控制决策,产生相应的控制量,使电机转动,带动小车运动,保持摆杆平衡。
自动控制原理 实验报告 实验一二阶系统的电子模拟及时域响应的动态测试实验二频率响应测试 实验三控制系统串联校正 实验四控制系统数字仿真 姓名: 学号:单位:仪器科学与光电工程学院 日期:2013年12月27日
实验一二阶系统的电子模拟及时域响应的动态测试 一、实验目的 1. 了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系。 2. 学习在电子模拟机上建立典型环节系统模型的方法。 3. 学习阶跃响应的测试方法。 二、实验内容 1. 建立一阶系统的电子模型,观测并记录在不同时间常数T时的跃响应曲线,并测定其过渡过程时间TS。 2. 建立二阶系统的电子模型,观测并记录在不同阻尼比ζ时的跃响应曲线,并测定其超调量σ%及过渡过程时间TS。 三、实验原理 1.一阶系统:系统传递函数为: 模拟运算电路如图1- 1所示: 图 1- 1 由图 1-1得 在实验当中始终取R2= R1,则K=1,T= R2C取不同的时间常数T分别为:、、1 2.二阶系统: 其传递函数为: 令=1弧度/秒,则系统结构如图1-2所示: 图1-2 根据结构图,建立的二阶系统模拟线路如图1-3所示:
图1-3 取R2C1=1 ,R3C2 =1,则及 ζ取不同的值ζ= , ζ= , ζ=1 四、实验步骤 1. 确定已断开电子模拟机的电源,按照实验说明书的条件和要求,根据计算的电阻电容值,搭接模拟线路; 2. 将系统输入端与D/A1相连,将系统输出端与A/D1相; 3. 检查线路正确后,模拟机可通电; 4. 双击桌面的“自控原理实验”图标后进入实验软件系统。 5. 在系统菜单中选择“项目”——“典型环节实验”;在弹出的对话框中阶跃信号幅值选1伏,单击按钮“硬件参数设置”,弹出“典型环节参数设置”对话框,采用默认值即可。 6. 单击“确定”,进行实验。完成后检查实验结果,填表记录实验数据,抓图记录实验曲线。 五、实验设备 HHMN-1电子模拟机一台、PC机一台、数字式万用表一块 六、实验数据 T1 R2250K500K1M C1μF1μF1μF Ts理论 Ts实测 Ts误差%%% 响应图形图1图2图3
微 机 原 理 实 验 报 告 班级: 指导老师:学号: 姓名:
实验一两个多位十进制数相加的实验 一、实验目的 学习数据传送和算术运算指令的用法 熟悉在PC机上建立、汇编、链接、调试和运行汇编语言程序的过程。 二、实验内容 将两个多位十进制数相加,要求被加数和加数均以ASCII码形式各自顺序存放在以DATA1、DATA2为首的5个内存单元中(低位在前),结果送回DATA1处。 三、程序框图 图3-1
四、参考程序清单 DATA SEGMENT DATA1 DB 33H,39H,31H,37H,34H;被加数 DATA1END EQU $-1 DATA2 DB 34H,35H,30H,38H,32H;加数 DATA2END EQU $-1 SUM DB 5 DUP(?) DATA ENDS STACK SEGMENT STA DB 20 DUP(?) TOP EQU LENGTH STA STACK ENDS CODE SEGMENT ASSUME CS:CODE,DS:DATA,SS:STACK,ES:DATA START: MOV AX,DATA MOV DS,AX MOV AX,STACK MOV SS,AX MOV AX,TOP MOV SP,AX
MOV SI,OFFSET DATA1END MOV DI,OFFSET DATA2END CALL ADDA MOV AX,4C00H INT 21H ADDA PROC NEAR MOV DX,SI MOV BP,DI MOV BX,05H AD1: SUB BYTE PTR [SI],30H SUB BYTE PTR [DI],30H DEC SI DEC DI DEC BX JNZ AD1 MOV SI,DX MOV DI,BP MOV CX,05H CLC AD2: MOV AL,[SI] MOV BL,[DI] ADC AL,BL
*欧阳光明*创编 2021.03.07
I 摆杆惯量0.0034 kg*m*m g 重力加速度9.8 kg.m/s (2)直线一级倒立摆根轨迹校正控制原理 基于根轨迹法校正的基本思想是:假设系统的动态性能指标可由靠近虚轴的一对共轭闭环主导极点来表征,因此,可把对系统提出的时域性能指标的要求转化为一对期望闭环主导极点。确定这对闭环主导极点的位置后,首先根据绘制根轨迹的相角条件判断一下它们是否位于校正前系统的根轨迹上。如果这对闭环主导极点正好落在校正前系统的根轨迹上,则无需校正,只需调整系统的根轨迹增益即可;否则,可在系统中串联一个超前校正装置。 常见的校正器有超前校正、滞后校正以及超前滞后校正等。 2. 实验方法 (1)直线倒立摆建模、仿真与分析 利用牛顿-欧拉方法建立直线一级倒立摆系统的数学模型;依照根轨迹设计的步骤得到系统的控制器,利用MA TLAB Simulink中的工具进行仿真分析。 (3)直线一级倒立摆根轨迹校正控制 利用MATLAB Simulink来实现根轨迹校正控制参数设定和仿真,并利用该参数来设定只限一级倒立摆的根轨迹校正控制器值,分析和仿真倒立摆的运行情况。 3. 实验装置 直线单级倒立摆控制系统硬件结构框图如图1所示,包括计算机、I/O设备、伺服系统、倒立摆本体和光电码盘反馈测量元件等几大部分,组成了一个闭环系统。 图1 一级倒立摆实验硬件结构图 对于倒立摆本体而言,可以根据光电码盘的反馈通过换算获得小车的位移,小车的速度信号可以通过差分法得到。摆杆的角度由光电码盘检测并直接反馈到I/O设备,速度信号可以通过差分法得到。计算机从I/O设备中实时读取数据,确定控制策略(实际上是电
自动控制原理 实验报告
实验一一、二阶系统的电子模拟及时域响应的动态测试 实验目的 1.了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系。 2.学习在电子模拟机上建立典型环节系统模型的方法。 3.学习阶跃响应的测试方法。 二、实验内容 1.立一阶系统的电子模型,观测并记录在不同时间常数T时的跃响应曲线, 并测定其过渡过程时间TS。 2.立二阶系统的电子模型,观测并记录在不同阻尼比ζ时的跃响应曲线, 并测定其超调量σ%及过渡过程时间TS。 三、实验原理 1.一阶系统: 系统传递函数为:错误!未找到引用源。 模拟运算电路如图1-1所示: 图1-1 由图得: 在实验当中始终取错误!未找到引用源。, 则错误!未找到引用源。, 错误!未找到引用源。 取不同的时间常数T分别为: 0.25、 0.5、1。 记录不同时间常数下阶跃响应曲线,测量纪录其过渡过程时 ts。(取错误! 未找到引用源。误差带) 2.二阶系统: 其传递函数为: 错误!未找到引用源。 令错误!未找到引用源。,则系统结构如图1-2所示:
图1-2 根据结构图,建立的二阶系统模拟线路如图1-3所示: 图1-3 取错误!未找到引用源。,错误!未找到引用源。,则错误!未找到引用源。及错误!未找到引用源。 错误!未找到引用源。取不同的值错误!未找到引用源。 , 错误!未找到引用源。, ,观察并记录阶跃响应曲线,测量超调量σ%(取错误!未找到引用源。误差带),计算过渡过程时间Ts。 四、实验设备 1.HHMN-1型电子模拟机一台。 2.PC 机一台。 3.数字式万用表一块。 4.导线若干。 五、实验步骤 1.熟悉HHMN-1型电子模拟机的使用方法,将各运算放大器接成比例器,通电调零。 2.断开电源,按照实验说明书上的条件和要求,计算电阻和电容的取值,按照模拟线路图搭接线路,不用的运算放大器接成比例器。 3.将D/A1与系统输入端Ui连接,将A/D1与系统输出端UO连接(此处连接必须谨慎,不可接错)。线路接好后,经教师检查后再通电。 4.在Windows XP桌面用鼠标双击MATLAB图标后进入,在命令行处键入autolab 进入实验软件系统。 5.在系统菜单中选择实验项目,选择实验一,在窗口左侧选择实验模型,其它步骤察看概述3.2节内容。 6.观测实验结果,记录实验数据,绘制实验结果图形,填写实验数据表格,完成实验报告。 7.研究性实验方法。实验者可自行确定典型环节传递函数,并建立系统的SIMULINK模型,验证自动控制理论相关的理论知识。实现步骤可察看概述3.3节内容。
微机原理与接口技术 实验报告 实验内容:汇编语言程序设计实验 组别:12 姓名: 班级: 学号:
一、实验目的 1、熟悉IDE86集成开发环境的使用。 2、通过编程、上机调试,进一步理解汇编语言的设计思路与执行过程。 3、熟悉DOS命令调用,以达到输入输出、返回DOS系统等目的。 4、掌握利用汇编实现求和与求最值的方法。 5、掌握利用汇编实现数制转换的方法。 6、巩固理论知识,锻炼动手编程,独立思考的能力。 二、实验内容(具体内容) 1、求从TABLE开始的10个无符号字节数的和,并将结果放在SUM字单元中。并查看前5个,前8 个数之和以及各寄存器和内存的状态。 2、在1的基础上修改程序,求出10个数中的最大值和最小值,最后将最大最小值分别赋给MAX及 MIN。 3、求1到 100 的累加和,并用十进制形式将结果显示在屏幕上。要求实现数据显示,并返回DOS 状态。 三、实验方法 1、设计思路 (1)实验1的设计思路:先将10个要相加的数存在以TABLE为首的10个连续的存储单元中,然后利用循环结构依次取出数值放在AL中并累加,若有进位则加到AH中直至循环10次累加结束,将累加的结果放在SUM中并返回DOS状态。 (2)实验2的设计思路:先将10个要比较的数放在以TABLE为首的10个连续的存储单元中。 将第一个数首先赋给AL和AH(分别存储相对最小和最大值)在利用LOOP循环结构,依次和下面的数进行比较,每次把相对的最大值与最小值存储到AH和AL中直至循环9次比较结束,将AH和AL里面的最大值与最小值赋给MAX和MIN,返回DOS状态 (3)实验3的设计思路:先在内存中定义COUNT=100,表示1-100求和,若相求1-n的和并显示只需COUNT的值为n即可,同时定义一块以DNUM为首地址的数据区用于存储累加和的十进制数对应的ASCII码。先利用AX和LOOP求出1-COUNT的累加和存在AX中;在进行数值转化,AX 依次除10取余数保存,将16进制数转化为10进制ASCII码值并存在DUNM中。最后在屏幕上显示并返回DOS状态。 2程序流程图 实验一、二和三的流程图分别如图1、图2和图3所示
微机原理实验报告 计算机网络的设计是一个要求动手能力很强的一门实践课程,在课程设计期间我努力将自己以前所学的理论知识向实践方面转化,尽量做到理论与实践相结合,在课程设计期间能够遵守纪律规章,不迟到、早退,认真完成老师布置的任务,同时也发现了自己的许多不足之处。 在课程设计过程中,我一共完成了11个实验,分别是1.制作直通电缆和交叉UTP、2.交换机Console口和Telnet配置、3.交换机端口和常规配置、4.虚拟局域网VLAN配置、5.路由器Console口Telnet 配置方法和接口配置、6.路由器静态路由配置、7单臂路由配置、8.动态路由协议配置、9.PPP协议配置、10路由器访问控制表(ACL)、11.网络地址转换(NAT)。 在制作直通电缆和交换UTP的实验中,我起初不能完全按照要求来剪切电缆,导致连接不通,后来在同学的帮助下,终于将实验完成。 在做到单臂路由配置和动态路由协议配置的实验,由于自身的基础知识掌握不牢,忘掉了一些理论知识,在重新翻阅课本和老师的指导之下,也成功的完成了试验。 从抽象的理论回到了丰富的实践创造,细致的了解了计算机网络连接的的全过程,认真学习了各种配置方法,并掌握了利用虚拟环境配置
的方法,我利用此次难得的机会,努力完成实验,严格要求自己,认真学习计算机网络的基础理论,学习网络电缆的制作等知识,利用空余时间认真学习一些课本内容以外的相关知识,掌握了一些基本的实践技能。 课程设计是培养我们综合运用所学知识,发现、提出、分析、解决问题的一个过程,是对我们所学知识及综合能力的一次考察。随着科学技术日新月异的不断发展,计算机网络也在不断的变化发展当中,这就要求我们用相应的知识来武装自己,夯实基础,为将来走向工作岗位,贡献社会做好充分的准备。
专业实验报告
(2)直线一级倒立摆根轨迹校正控制原理 基于根轨迹法校正的基本思想是:假设系统的动态性能指标可由靠近虚轴的一对共轭闭环主导极点来表征,因此,可把对系统提出的时域性能指标的要求转化为一对期望闭环主导极点。确定这对闭环主导极点的位置后,首先根据绘制根轨迹的相角条件判断一下它们是否位于校正前系统的根轨迹上。如果这对闭环主导极点正好落在校正前系统的根轨迹上,则无需校正,只需调整系统的根轨迹增益即可;否则,可在系统中串联一个超前校正装置。 常见的校正器有超前校正、滞后校正以及超前滞后校正等。 2. 实验方法 (1)直线倒立摆建模、仿真与分析 利用牛顿-欧拉方法建立直线一级倒立摆系统的数学模型;依照根轨迹设计的步骤得到系统的控制器,利用MATLAB Simulink中的工具进行仿真分析。 (3)直线一级倒立摆根轨迹校正控制 利用MATLAB Simulink来实现根轨迹校正控制参数设定和仿真,并利用该参数来设定只限一级倒立摆的根轨迹校正控制器值,分析和仿真倒立摆的运行情况。 3. 实验装置 直线单级倒立摆控制系统硬件结构框图如图1所示,包括计算机、I/O设备、伺服系统、倒立摆本体和光电码盘反馈测量元件等几大部分,组成了一个闭环系统。 图1 一级倒立摆实验硬件结构图 对于倒立摆本体而言,可以根据光电码盘的反馈通过换算获得小车的位移,小车的速度信号可以通过差分法得到。摆杆的角度由光电码盘检测并直接反馈到I/O设备,速度信号可以通过差分法得到。计算机从I/O设备中实时读取数据,确定控制策略(实际上是电机的输出力矩),并发送给I/O设备,I/O设备产生相应的控制量,交与伺服驱动器处理,然后使电机转动,带动小车运动,保持摆杆平衡。
《自动控制元件》作业 第一章 直流伺服电动机 1-1直流伺服电动机的电磁转矩和控制电流由什么决定? 答:a :由T em =C m ΦI a 知电磁转矩由每极磁通量和绕组电流大小决定。 b :由T em =T 0 +T 2 =CmΦIa 控制电流由负载转矩(T 2)和空载转矩(T 0)大小决定。 1-2当直流伺服电动机的负载转矩恒定不变时,控制电压升高将使稳态的电磁转矩、控制电流、转速发生怎样的变化?为什么? 答:a :电磁转矩T em =T 0 +T 2可见电磁转矩也不变。由T em =C m ΦI a 知控制电流 I a 也不变 b :KeKt RaTem Ke Ua n -=知T em 不变可见U a 转速升高理想空载转速变大导致转速n 升高。 1-3已知一台直流电动机,其电枢额定电压Ua=110V ,额定运行时电枢电流Ia=0.4A ,转速n=3600rpm ,它的电枢电阻Ra=50欧姆,负载阻转矩To=15mN.m 。试问该电动机额定负载转矩是多少? 答:Ea= Ua- IaRa=110-0.4×50=90V Ea=Ce Φn, Ce=0.105Cm Cm Φ=0.2383600 0.10590n 105.0=?=?Ea T em =T 0 +T 2=CmΦI a →T 2=CmΦIa -T 0 =0.40.238=0.0952-15×10-3=80.2mN.m 1-6当直流伺服电动机电枢电压、励磁电压不变时,如将负载转矩减少,试问此时电动机的电枢电流、电磁转矩、转速将怎样变化?并说明由原来的状态到新的稳态的物理过程。 答:磁转矩T em =T 0 +T 2可见T 2 ↓电磁转矩也↓。由T em =C m ΦI a 知控制电流I a ↓
微机原理实验报告记录
————————————————————————————————作者:————————————————————————————————日期:
微机原理实验报告 班级:自动化72 组员梁慕佳 07054031 张乐 07054033 张林鹏 07054034
实验一:8255 并行接口实验 1 实验目的 1. 学习并掌握8255 的工作方式及其应用; 2. 掌握8255 典型应用电路的接法。 2 实验设备 PC机一台,TD-PITE 实验装置一套。 3 实验内容 1. 基本输入输出实验。编写程序,使8255 的A口为输入,B口为输出,完成拨动开关到数据灯的数据传输。要求只要开关拨动,数据灯的显示就发生相应改变。 2. 流水灯显示实验。编写程序,使8255 的A口和B口均为输出,数据灯D7~D0由左向右,每次仅亮一个灯,循环显示,D15~D8与D7~D0 正相反,由右向左,每次仅点亮一个灯,循环显示。 4 实验原理 并行接口是以数据的字节为单位与I/O 设备或被控制对象之间传递信息。CPU和接口之间的数据传送总是并行的,即可以同时传递8 位、16 位或32 位等。8255可编程外围接口芯片是Intel公司生产的通用并行I/O 接口芯片,它具有A、B、C 三个并行接口,用+5V单电源供电,能在以下三种方式下工作:方式0--基本输入/输出方式、方式1--选通输入/输出方式、方式2--双向选通工作方式。8255的内部结构及引脚如图2-6-1 所示,8255工作方式控制字和C口按位置位/复位控制字格式如图2-6-2所示。 图2-6-1 8255内部结构及外部引脚图