基于UG NX4.0的连杆机构运动学仿真摘要:介绍了软件UG NX4.0的机构仿真功能, 在此基础上对连杆机构的仿真过程作了较详细的陈述, 给出
其位移、速度和加速度曲线,为利用U G 实现机构的CAD / CA E 一体化作出有益的探索。
关键词:连杆机构; 运动仿真; UG ;CAD;CA E
一、引言
UG软件是Unigraphics软件的简称,它汇集了美国航空航天和汽车工业的专业经验,以CAD /CAM/CAE一体化而著称1。CAE包括两大内容:一、有限元分析;二、机构分析。机构分析模块可以提供静态、运动、动力学计算以及动态仿真等功能。其运动分析采用了美国MDI公司开发的ADAMS解算器。
UG为机械工程师提供了CAD/CAE/CAM集成的虚拟产品开发环境。本文利用UG NX4.0 CAD /CAE对六连杆曲柄滑块机构进行运动学分析,便捷地得到了滑块的运动特性。
二、六连杆机构的二维模型的生成
机构分析主要包括运动分析和力分析。其实两者是密切相关的,只是为了分析方便,前者先不考虑作用在机构上的力,并通常假定原动件作等速运动,只从几何上分析机构的位移、速度和加速度等运动情况2。利用UG Modeling模块中的曲线功能建立六连杆滑块机构的二维模型。(见图1)也可以分别建立各个连杆的三维模型,然后利用装配功能将各个连杆装配起来建立三维机构模型。
图1 六连杆曲柄滑块机构
三、连杆机构的运动学仿真
在UG中的应用中选择Motion便可以进入机构分析模块。
(一)Motion模块中的预设置
首先要设置机构对象的各种参数,在此选择角度单位为弧度,系统默认是度数。运动场景选择运动学仿真。
1.定义连杆特性
在UG 中所有运动构件都可以看成是连杆,可以分别定义L001~L005连杆(其中机架可以不定义)
2.定义运动副
机构中均为低副。分别定义旋转副J001~J006,J007定义为滑动副。其中J001为原动件,添加角速度ω0=10rad/s ,J003和J004为复合旋转副。
(二)机构的运动仿真
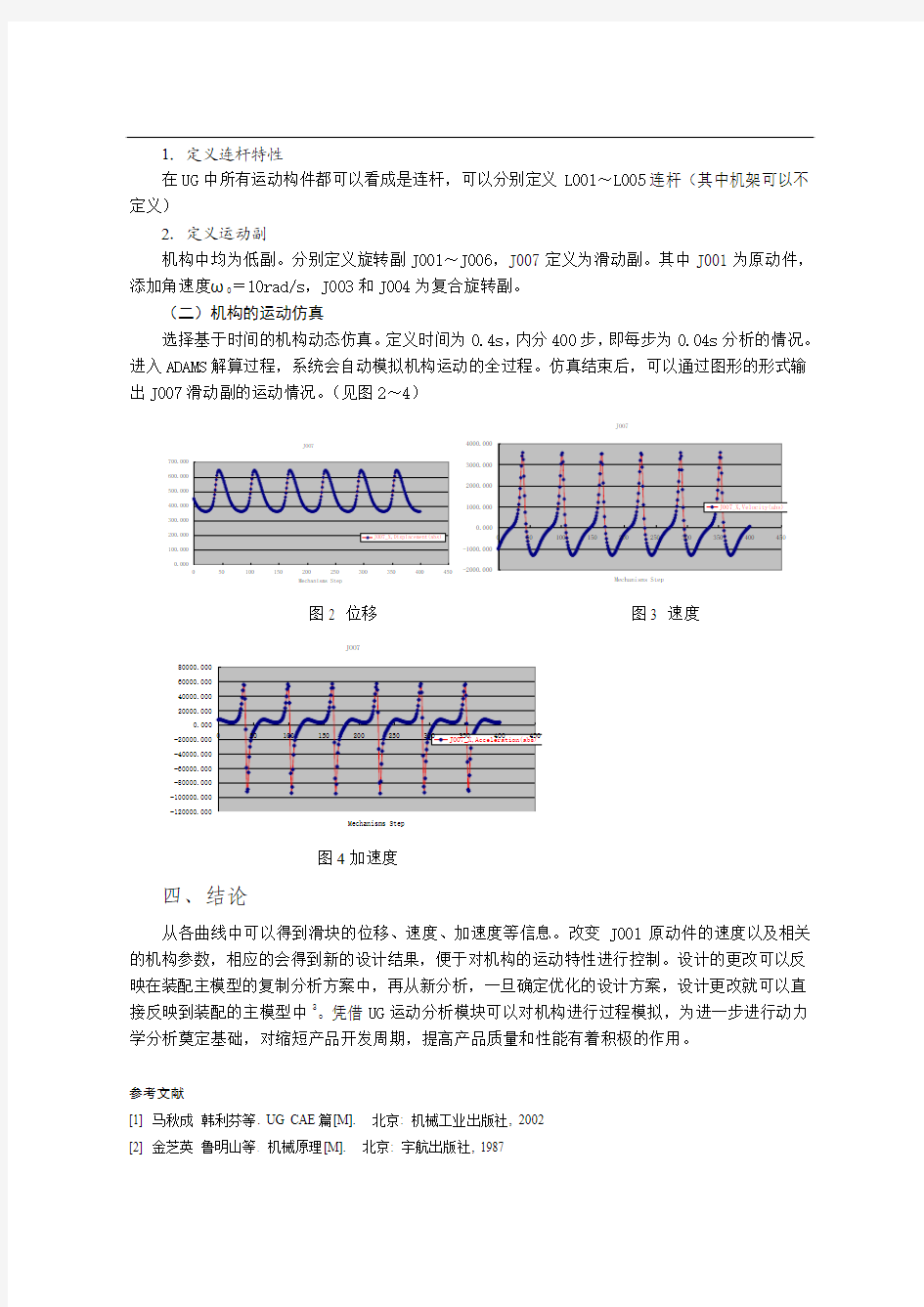
选择基于时间的机构动态仿真。定义时间为0.4s ,内分400步,即每步为0.04s 分析的情况。进入ADAMS 解算过程,系统会自动模拟机构运动的全过程。仿真结束后,可以通过图形的形式输出J007滑动副的运动情况。(见图2~4)
JOO7
50
100
150
200250
300
350
400
450
Mechanisms Step
JOO7
-2000.000
-1000.0000.000
1000.000
2000.0003000.0004000.000Mechanisms Step
图2 位移 图3 速度
JOO7
-120000.000
-100000.000-80000.000
-60000.000-40000.000-20000.0000.00020000.000
40000.00060000.00080000.000Mechanisms Step
图4加速度
四、结论
从各曲线中可以得到滑块的位移、速度、加速度等信息。改变J001原动件的速度以及相关的机构参数,相应的会得到新的设计结果,便于对机构的运动特性进行控制。设计的更改可以反映在装配主模型的复制分析方案中,再从新分析,一旦确定优化的设计方案,设计更改就可以直接反映到装配的主模型中3
。凭借UG 运动分析模块可以对机构进行过程模拟,为进一步进行动力学分析奠定基础,对缩短产品开发周期,提高产品质量和性能有着积极的作用。
参考文献
[1] 马秋成 韩利芬等. UG CAE 篇[M]. 北京: 机械工业出版社, 2002 [2] 金芝英 鲁明山等. 机械原理[M]. 北京: 宇航出版社, 1987
3 [3] 张方瑞于鹰宇等. UG NX2高级实例教程[M]. 北京: 电子工业出版社, 2005
第八章平面连杆机构及其设计 一、填空题: 1.平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。 2.在铰链四杆机构中,运动副全部是低副。 3.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 4.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 5.在铰链四杆机构中,与连架杆相连的构件称为连杆。 6.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 7.对心曲柄滑块机构无急回特性。 8.平行四边形机构的极位夹角θ=00,行程速比系数K= 1 。 9.对于原动件作匀速定轴转动,从动件相对机架作往复直线运动的连杆机构,是否有急回 特性,取决于机构的极位夹角是否为零。 10.机构处于死点时,其传动角等于0?。 11.在摆动导杆机构中,若以曲柄为原动件,该机构的压力角α=00。 12.曲柄滑块机构,当以滑块为原动件时,可能存在死点。 13.组成平面连杆机构至少需要 4 个构件。 二、判断题: 14.平面连杆机构中,至少有一个连杆。(√) 15.在曲柄滑块机构中,只要以滑块为原动件,机构必然存在死点。(√) 16.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 17.有死点的机构不能产生运动。(×) 18.曲柄摇杆机构中,曲柄为最短杆。(√) 19.双曲柄机构中,曲柄一定是最短杆。(×) 20.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 21.在摆动导杆机构中,若以曲柄为原动件,则机构的极位夹角与导杆的最大摆角相等。 (√) 22.机构运转时,压力角是变化的。(√) 三、选择题:
23.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A ≤ B ≥ C > 24.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而 充分条件是取 A 为机架。 A 最短杆或最短杆相邻边 B 最长杆 C 最短杆的对边。 25.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时, 有两个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 26.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 A 为机架时, 有一个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 27.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 C 为机架时, 无曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 28.铰链四杆机构中,若最短杆与最长杆长度之和 B 其余两杆长度之和,就一定是双摇杆 机构。 A < B > C = 29.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 C 为原动件时,此时机构处在死点位 置。 A 曲柄 B 连杆 C 摇杆 30.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 A 为原动件时,此时为机构的极限 位置。 A 曲柄 B 连杆 C 摇杆 31.对曲柄摇杆机构,当以曲柄为原动件且极位夹角θ B 时,机构就具有急回特性。 A <0 B >0 C =0 32.对曲柄摇杆机构,当以曲柄为原动件且行程速度变化系数K B 时,机构就具有急 回特性。 A <1 B >1 C =1 33.在死点位置时,机构的压力角α= C 。 A 0 o B 45o C 90o 34.若以 B 为目的,死点位置是一个缺陷,应设法通过。 A 夹紧和增力B传动 35.若以 A 为目的,则机构的死点位置可以加以利用。 A 夹紧和增力;B传动。
课程设计任务书
目录 1 绪论 (1) 1.1CATIA V5软件介绍 (1) 1.2ADAMS软件介绍 (1) 1.3S IM D ESIGNER软件介绍 (2) 1.4本次课程设计的主要内容及目的 (2) 2 曲柄连杆机构的建模 (3) 2.1活塞的建模 (3) 2.2活塞销的建模 (5) 2.3连杆的建模 (5) 2.4曲轴的建模 (6) 2.5汽缸体的建模 (8) 3 曲柄连杆机构的装配 (10) 3.1将各部件导入CATIA装配模块并利用约束命令确定位置关系 (10) 4 曲柄连杆机构导入ADAMS (14) 4.1曲柄连杆机构各个零部件之间运动副分析 (14) 4.2曲柄连杆机构各个零部件之间运动副建立 (14) 4.3曲柄连杆机构导入ADAMS (16) 5 曲柄连杆机构的运动学分析 (17) 结束语 (21) 参考文献 (22)
1 绪论 1.1 CATIA V5软件介绍 CATIA V5(Computer-graphics Aided Three-dimensional Interactive Application)是法国Dassault公司于1975年开发的一套完整的3D CAD/CAM/CAE一体化软件。它的内容涵盖了产品概念设计、工业设计、三维建模、分析计算、动态模拟与仿真、工程图的生成、生产加工成产品的全过程,其中还包括了大量的电缆和管道布线、各种模具设计与分析、人机交换等实用模块。CATIA V5不但能保证企业内部设计部门之间的协同设计功能而且还可以提供企业整个集成的设计流程和端对端的解决方案。CATIA V5大量应用于航空航天、汽车及摩托车行业、机械、电子、家电与3C产业、NC加工等领域。 由于其功能的强大而完美,CATIA V5已经成为三维CAD/CAM领域的一面旗帜和争相遵从的标准,特别是在航空航天、汽车及摩托车领域。法国的幻影2000系列战斗机就是使用CATIA V5进行设计的一个典范;波音777客机则使用CATIA V5实现了无图纸设计。另外,CATIA V5还用于制造米其林轮胎、伊莱克斯电冰箱和洗衣机、3M公司的粘合剂等。CATIA V5不仅给用户提供了详细的解决方案,而且具有先进的开发性、集成性及灵活性。 CATIA V5的主要功能有:三维几何图形设计、二维工程蓝图绘制、复杂空间曲面设计与验证、三维计算机辅助加工制造、加工轨迹模拟、机构设计及运动分析、标准零件管理。 1.2 ADAMS软件介绍 ADAMS即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.)开发的虚拟样机分析软件。目前,ADAMS己经被全世界各行各业的数百家主要制造商采用。根据1999年机械系统动态仿真分析软件国际市场份额的统计资料,ADAMS软件销售总额近八千万美元、占据了51%的份额。 ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格郎日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、
悬架运动学及柔顺性(K&C)试验介绍 时间:2011-05-16 11:55:09 来源:奇瑞汽车股份有限公司试验技术中心整车试验部戚海波薛志祥张珣本文主要介绍悬架运动学及柔顺性(K&C)试验台的结构组成、试验项目以及其在底盘开发中的应用。 【摘要】汽车操纵稳定性是汽车主要性能之一。卓越的操纵稳定性能不仅大大提高了汽车主动安全性,更能给驾驶者带来驾驶乐趣。随着我国汽车行业的迅猛发展,用户对汽车产品的性能要求不断提高,并越来越关注整车的操纵稳定性。 汽车的悬架运动学及柔顺性特性对整车的操纵稳定性水平具有决定性的影响,因此国际上各大汽车生产厂家及试验机构都通过购买悬架运动学及柔顺性参数测量设备来提升其在整车底盘设计和操稳调校方面的能力。 1. K&C试验台介绍 悬架运动学及柔顺性试验台简称K&C试验台,主要用来测量悬架及转向系统的几何运动学(Kinematics)特性和各种受力情况下的柔顺性(Compliance)数据,这些特性和数据在很大程度上影响着整车的操纵稳定性水平。 K&C试验的基本原理就是向车辆的悬架系统施加一系列的载荷和位移输入。对于准静态 K&C试验,为了不激励起任何惯性、减振器或橡胶衬套引发的动态力,输入施加的速度很缓慢。 K&C试验台在此过程中测量大量的参数,通过这些参数可以得到与车辆悬架性能相关的主要参数,包括悬架刚度和迟滞,Bump Steer,Roll Steer,侧倾刚度,纵向和侧向柔性转向,以及转向系统特性。对这些参数的理解对于彻底理解车辆的行驶性、平顺性、转向和操纵性具有决定意义。 K&C试验结果可以为ADAMS等CAE分析软件提供辅助验证,提高仿真的准确性,为设计和试验开发提供有力支持。 通过K&C试验、道路上的客观测量试验和主观评价试验的结果进行系统分析,我们可以找出车辆在操纵稳定性方面存在的问题以及问题的原因。
基于Workbench的仿真内燃机曲柄连 杆机构动力学分析 (机械与动力工程学院南京 211816) 摘要:本文以S195 内燃机为例,对单缸内燃机的曲柄连杆机构简化模型 进行了有限元分析。根据力学分析结果和强度要求设计内燃机曲柄连杆机构结构,并应用UG软件建立该机构三维数字化虚拟装配模型,结合有限元理论及其分析软件ANSYS Workbench,模拟分析了曲柄连杆机构装配体动力学分析,结果表明,数字化模型结合装配体有限元分析,可解决曲柄连杆机构结构强度评价问题,有助于缩短汽油机开发周期和减少成本。 关键词:曲柄连杆,有限元分析,Workbench,动力学仿真。 Dynamic analysis of the crank connecting rod mechanism based on Workbench simulation (Nanjing Technology of University, mechanical and power engineering, Yin Zhenhua, Nanjing, 211816) Abstract Based on the S195 diesel engine as an example, the crank connecting rod mechanism of single cylinder diesel engine was analyzed in finite element analysis. According to the mechanical analysis results and strength requirements, the structure of the engine crank connecting rod mechanism is designed, and the 3D digital virtual assembly model of the mechanism is established. Combined with the finite element theory and the analysis software ANSYS Workbench. The results show that the numerical model combined with the finite element analysis can solve the problem of structural strength evaluation of the crank link mechanism, which helps to shorten the development cycle and reduce the cost. Key words: crank connecting rod, finite element analysis, Workbench, dynamic simulation.
平面四杆机构的运动仿真模型分析 1前言 平面四杆机构是是平面连杆机构的基础,它虽然结构简单,但其承载能力大,而且同样能够实现多种运动轨迹曲线和运动规律,因而在工程实践中得到广泛应用。 平面四杆机构的运动分析, 就是对机构上某点的位移、轨迹、速度、加速度进行分析, 根据原动件的运动规律, 求解出从动件的运动规律。平面四杆机构的运动设计方法有很多,传统的有图解法、解析法和实验法。随着计算机技术的飞速发展,机构设计及运动分析已逐渐脱离传统方法,取而代之的是计算机仿真技术。本文在UG NX5环境下对平面四杆机构进行草图建模,通过草图中的尺寸约束、几何约束及动画尺寸等功能确定各连杆的尺寸,之后建立相应的连杆、运动副及运动驱动,对建立的运动模型进行运动学分析,给出构件上某点的运动轨迹及其速度和加速度变化规律曲线,文章最后简要分析几个应用于工程的平面四杆机构实例。 2平面四杆机构的建模 2.1问题的提出 平面四杆机构因其承载能力大,可以满足或近似满足很多的运动规律,所以其应用非常广泛,本文以基于曲柄摇杆机构的物料传送机构为例,讨论其建模及运动分析。 如图1所示,ABCD为曲柄摇杆机构,曲柄AB为主动件,机构在运动中要求连杆BC的延伸线上E点保持近似直线运动,其中直线轨迹为工作行程,圆弧轨迹为回程或空程,从而实现物料传送的功能。
2.2平面四杆机构的建模 由于物料传送机构为曲柄摇杆机构,所以它符合曲柄存在条件。根据机械原理课程中的应用实例[1],选取AB=100,BC=CD=CE=250,AD=200,单位均为毫米。 在UG NX5的Sketch环境里,创建如图2所示的草图,并作相应的尺寸约束和几何约束,其中EE'为通过E点的水平轨迹参考线,用以检验E点的工作行程运动轨迹。现通过草图里的尺寸动画功能,令AB与AD的夹角从0°到360°变化,可看到E点的变化轨迹为直线和圆弧,如图3所示为尺寸动画的四个截图,其中图3(a)中的E点为水平轨迹的起点,图3(b)中的E点为水平轨迹的中点,图3(c)中的E点为水平轨迹的终点,而图3(d)中的E点为圆弧轨迹(图中未画出)即回程的中点。 如E点轨迹不符合设计要求,则可适当调整各杆件的尺寸,再通过尺寸动画功能检验。
基于Matlab/Simulink的槽轮机构间歇运动特性的分析与仿真 摘要:将槽轮机构转换为倒置曲柄滑块机构,建立了槽轮机构的运动数学模型,利用Matlab计算了槽轮机构的运动参数并绘制了相应的动态曲线,该方法直观精确,提高了设计效率。 关键词:槽轮机构间歇运动Matlab/Simulink 运动特性 Geneva mechanism based on Matlab/Simulink intermittent motion characteristics analysis and simulation Abstract :Converse geneva mechanism for inverted slider-crank mechanism,the geneva machanism motion mathematical model is established,using Matlab to calculate the dynamic movement parameters of the geneva mechanism and draw the corresponding curve,the method is accurate,intuitive improves the design efficiency Key words:the geneva mechanism intermittent motion Matlab / Simulink movement characteristics 0引言: 槽轮机构能将主动件连续旋转运动转换成从动件有规律的运动和停歇,是实现周期性运动和停歇的典型机构。槽轮机构的结构简单,外形尺寸小,效率高,并能较平稳地、间歇地进行传位,在现代机械设备中得到了广泛的应用,但因传动时尚存在柔性冲击,故常用于速度不高的场合。本文将针对槽轮机构的间歇运动,使用Matlab软件中的仿真工具箱Simulink进行运动学仿真,通过仿真得到从槽轮的运动变化曲线,并对槽轮机构的运动特性进行分析。 1槽轮机构的物理模型转换 图1 外槽轮机构简图图2 曲柄滑块机构 1-槽轮;2-拨盘1-滑块;2-曲柄;3-摇杆 在如图1所示为外槽轮机构简图,图2所示为倒置的曲柄滑块机构。当销子和轮槽结合时图2中倒置曲柄滑块构造形式与图1中槽轮机构类似。其中图1中带销子的拨盘2可视为连杆2,而槽轮可视为连杆3,滑块1代表销子。 2槽轮机构的数学建模 整个系统的运动过程可分为两个状态,即销子和轮槽结合与分离的两个状态
(研究生课程论文) 汽车动力学 论文题目:汽车悬架系统动力学研究指导老师:乔维高 学院班级: 学生姓名: 学号: 2015年1月
汽车悬架系统动力学研究 摘要:汽车悬架类型的选择和悬架参数的差异对汽车的操纵稳定性和行驶平顺性具有重要的影响。主要分析了麦弗逊悬架的结构特点,并通过ADAMS软件建立麦弗逊悬架的3D模型,对其进行仿真分析,得出悬架参数的优化设计方法。关键词:麦弗逊悬架;ADAMS多刚体动力学;仿真分析 The automobile suspension system dynamics research Caisi Vehicle 141 1049721402344 Abstract:Different kinds of suspension systems and of differences in suspension parameters on the vehicle steering stability and riding comfort have important influence. Mainly analyzed the structure characteristics of Macpherson suspension, and by using ADAMS software to establish 3D model of Macpherson suspension, carry on the simulation analysis, the method of optimal design parameters of the suspension. Key words:Macpherson suspension; ADAMS /Car; multi-rigid-body dynamics; simulation and analysis 引言 汽车悬架是汽车车轮与车身之间一切装置的总称。其功用在于:在垂直方向能够衰减振动和起悬挂作用;在侧向可防止车身侧倾和左右车轮载荷转移;在行驶方向上能够保证驱动与制动的实现并保持行驶方向的稳定性。不同的悬架设置会使驾驶者有不同的感受。看似简单的悬架系统综合多种作用力,决定着轿车的稳定性、舒适性和安全性,是现代轿车十分关键的部件之一。悬架系统起着传递车轮和车身之间的力和力矩、引导与控制汽车车轮与车身的相对运动、缓和路面传递给车身的冲击、衰减系统的振动等作用,汽车悬架系统对汽车的操
机械设计与制造 MachineryDesign&Manufacture 第11期2009年11月 文章编号:lOOl一3997(2009)11-0200—02 双横臂独立悬架运动学仿真分析木 潘国昌1黄虎2刘新田2刘长虹2 (1上海交通大学机械与动力工程学院,上海200240)(2上海工程技术大学汽车工程学院,上海201620)ThekinematicaIanalysisofthedouble—wishboneindependentsuspension. PANGuo—chan91,HUANGHu2,LIUXin—tian2,LIUChang—hong工 (1ChoolofMechanicalEngineering,ShanghaiJiaoTongUniversity,Shanghai200240,China)(2CollegeofAutomobileEngineering,ShanghaiUniversityofEngineeringScience,Shanghai201620,China)《【摘要】悬架的运动学性能直接影响操纵稳定性等汽车使用性能。利用Adams多体动h学软件建56立双横臂独立悬架的多刚体模型,通过对模型中车轮施加运动约束从而对其进行运动学洼能的仿真分92析,从而获得该车轮定位角的变化,将设计要求和分析结果对比可以得出此悬架结构设计的合理性及需; V:性能改进的地方。a6关键词:双横臂独立悬架;运动学分析;Adams22【Abstract】Thekinematicdpe咖珊吼ceofsuspensionNay口后e),impactOlZthevehiclepe咖丌脚配eiisuchasVehicleControllabilityandStability.Firstly,Wemodelingthemulti一蟛dmodelofDouble-Wish-66boneIndependentSuspensionbyusingtheMotionView,andthen,startthesimulationafterconstrainingtheQ;vehiclewheelsandwecangetthechangeofthevehiclelocationangle,fin趔y,comparethesimulateresultiiwiththedesignrequirement,wewillfindwhethertheresultmeetthedemandofdesignandwhichpe咖卜6 V●6mglll虻eshouldbeimproved.9:^2Keywords:Double-wishboneindependentsuspension;Kinematicalanalysis;Adamsj 中图分类号:THl2,U463.33+1文献标识码:A 1引言 悬架是现代汽车,卜的重要总成之一,它把车架(或车身)与车轴(或车轮)弹性地连接在一起I“。汽车悬架的运动特性是指当汽车车轮上下跳动时,前轮定位参数、轮距、侧倾中心高度等参数相应的变化规律,通过各物理参数的变化传递作用在车轮和车架(或车身)之间的一切力和力矩;缓和路面传给车架(或车身)的冲击载荷,衰减由此引起的承载系统的振动,保证汽车具有足够好的行驶平顺性和操纵稳定性等运动性能阁以及轮胎的使用寿命。因此进行独立悬架运动特性研究是合理地选择独立悬架导向机构几何尺寸参数的重要前提。由于不等长双横臂式悬架,只要适当选择、优化上下横臂的长度,并通过合理的布置,就可以使轮距及前轮定位参数变化均在可接受的限定范围内,町保证汽车具有良好的行驶稳定性。本文以某开发车型Ij{『双横臂独立悬架为研究对象,运用多体动力学理论和软件,从悬架系统运动学仿真出发,通过施加轮跳运动对悬架进行分析并评价其性能,分析过程的运动直观准确,提高设计精度和设计效率。 2双横臂悬架模型的建立 根据双横臂独立悬架的实际系统,简化出与其原理一致的抽象fL何模型,其四杆组成的是由多节点联结组成的—个典型RSSR闭环窄问机构,如图1所示。双横臂悬架三维模型,如图2所示。图2中上摆臂和F摆臂均为三角形,上下控制臂外侧节点通过球铰和转向节相连,在E下控制臂则通过旋转副分别和车身、前副车架连接;对于横向稳定杆的建立可采用前横向稳定杆分成左、右对称的2个部分,2部分之间由1个旋转副和1个扭转弹簧一阻尼器相连以该扭转弹簧一阻尼器的扭转刚度和阻尼来模拟实际横向稳定杆的扭转刚度和阻尼,也可以采用beam梁的方式建立,这种杆系的处理方式更真实的模拟稳定杆的特性,因此模型中选择的是第二种处理模式;轮胎模型使用软件自带的Fiala轮胎模型。 E罄啭 下摆臂 图1双横臂独立:悬架简化结构图 图2双横臂悬架三维模埠! 在Adams中建立所有的悬架系统的各个部件的模型,依据已有的悬架硬点数据修改软件的相应参数数值,建立与实际车辆一直的模型;并输入前悬架系统螺旋弹簧、减振器等部件的力学 ★来稿口期:2009-01-18 ★基金项目:上海市高校选拔培养优秀青年教师科研专项基金资助(GJD-0702I),上海市重点学科建设资助项目(P1405) 万方数据
湖南农业大学工学院 课程设计说明书 课程名称:机械CAD/CAM课程设计 题目名称:槽轮机构运动学仿真 班级:20 11 级机制专业四班 姓名: 学号: 指导教师: 评定成绩: 教师评语: 指导老师签名: 20 年月日
目录 摘要 (1) 关键词 (1) 1 槽轮机构的结构组成和工作原理 (1) 2 零件三维实体模型建立的方法 (1) 2.1 主动转盘三维实体模型建立的方法 (1) 2.2 从动槽轮三维实体模型建立的方法 (3) 2.3 其他零件三维实体模型建立的方法 (4) 3 装配模型建立的方法和步骤 (6) 4 建立装配模型的运动仿真 (9) 5 装配模型的运动仿真分析 (13) 6 装配模型的运动仿真分析结论 (15) 7 装配模型图集 (16) 7.1 总成图 (16) 7.2 爆炸图 (16) 7.3 零件图 (17) 7.4 主动转盘工程图 (18) 8 总结 (19) 参考文献.......................................... (19)
槽轮机构运动学仿真 学生: (工学院,11-机制4班,学号) 摘要:槽轮机构是将主动拨盘的连续转动转化为从动槽轮的间歇转动,以达到间歇进给、转位和分度等工作要求。运用Pro/E软件对槽轮机构进行三维实体建模及装配,并运用模块进行运动仿真分析,得出机构的角速度、角加速度随时间变化的曲线。 关键词:槽轮机构;间歇运动;运动仿真 1、槽轮机构的结构组成和工作原理 槽轮机构由槽轮和圆柱销组成的单向间歇运动机构,又称马尔他机构。它常被用来将主动件的连续转动转换成从动件的带有停歇的单向周期性转动。槽轮机构有外啮合和内啮合以及球面槽轮等。外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同,球面槽轮可在两相交轴之间进行间歇传动。槽轮机构典型结构由主动转盘、从动槽轮和机架组成。 2、零件三维实体模型建立的方法 2.1、主动转盘三维实体模型建立的方法 ②选择模板
基于SolidWorks的曲柄连杆机构动力学仿真研究 发表时间:2012-2-28 作者: 陈敏*刘晓叙来源: 万方数据 关键字: 发动机运动学动力学仿真 本文用SolidWorks软件建立了一个简化的单缸发动机模型,用COSMOS Motion对该模型进行了发动机运动学和动力学仿真,对运动学仿真的结果进行了验证。 设计往复活塞式发动机时,要进行发动机的运动学和动力学计算,发动机的运动学是计算发动机活塞的位移、速度和加速度。动力学计算主要包括主要运动件的载荷,为零件的强度计算提供依据。在过去的设计中,发动机的运动学和动力学引算一般是采用计算机编程的方式进行。 SolidWorks是目前应用较为广泛的三维设计软件,COSMOS Motion是以ADAMS软件的技术为内核的机构运动学和动力学仿真软件,是SolidWorks的一个插件,与SolidWorks可以进行无缝对接。我们运用该软件,对一个简化的单缸发动机模型进行了运动学与动力学仿真,其结果对往复活塞式发动机的运动学和动力学设计计算有参考意义,现将研究情况介绍如下: 1 发动机模型的基本情况 为了研究的需要,建立了一个简化的单缸发动机模型,主要的结构参数为:缸径125mm,行程160mm,连杆大、小头孔中心距210mm,λ=0.381。发动机的活塞、活塞销、连杆和曲轴用SolidWorks进行三维实体造型设计,然后进行装配,发动机装配后效果及坐标系见图1。 图1 发动机模型 2 发动机的运动学仿真 由于是对一个特定的模型作定量的运动学和动力学仿真,所以,从简单起见,在仿真参数中,将曲轴的转速设为60r/min,即1r/s。在COSMOS Motion中运行仿真后,可以得到活塞运行的位移、速度和加速度,见图2、图3、图4。
前言 1.1目的与意义 悬架通过吸收车辆振动来改善乘坐舒适度错误!未找到引用源。。悬架运动学特性是一些悬架结构参数随车轮跳动的变化规律, 与悬架的导向机构有关.。这些参数的变化会使车轮的地面附着情况及滚动趋向发生变化, 进而影响车辆的动力性、制动性和操纵稳定性等性能错误!未找到引用源。错误!未找到引用源。错误!未找到引用源。。双横臂悬架系统常用在后轮驱动的汽车中,双横臂独立悬架是现代汽车常用的结构形式,特别是在赛车上得到了广泛的应用,其设计好坏对操纵稳定性、平顺性和安全性有着重要的影响错误!未找到引用源。。操纵稳定性不仅影响到汽车驾驶的操纵方便程度, 而且也是决定汽车高速安全行驶的一个主要性能。 FSAE赛车悬架系统进行设计的目的与意义,在于探讨悬架运动学参数的变化规律,为赛车调试提供理论依据。确保赛车具有良好的操纵稳定性和行驶平顺性。确保所设计悬架在车队赛车上运用的可行性和可靠性。 1.2 赛事概述 1.2.1 赛事简介 中国大学生方程式汽车大赛(以下简称"FSAE")是中国汽车工程学会及其合作会员单位,在学习和总结美、日、德等国家相关经验的基础上,结合中国国情,精心打造的一项全新赛事。 FSAE活动由各高等院校汽车工程或与汽车相关专业的在校学生组队参加。FSAE 要求各参赛队按照赛事规则和赛车制造标准,自行设计和制造方程式类型的小型单人座休闲赛车,并携该车参加全部或部分赛事环节。比赛过程中,参赛队不仅要阐述设计理念,还要由评审裁判对该车进行若干项性能测试项目。 在比赛过程中,参赛队员能充分将所学的理论知识运用于实践中。同时,还学习到组织管理、市场营销、物流运输、汽车运动等多方面知识,培养了良好的人际沟通能力和团队合作精神,成为符合社会需求的全面人才。 1.2.2 赛事意义 目前,中国汽车工业已处于大国地位,但还不是强国。从制造业大国迈向产业强国已成为中国汽车人的首要目标,而人才的培养是实现产业强国目标的基础保障之一。
槽轮机构的组成及其特点 newmaker (1) 槽轮的组成(Composition of Geneva Mechanism) 如右图所示,主动拨盘上的圆柱销进进槽轮上的径向槽以前,凸锁止弧将凹锁止弧锁住,则槽轮静止不动。圆柱销进进径向槽时,凸、凹锁止弧恰好分离,圆柱销可以驱动槽轮转动。当圆柱销脱离径向槽时,凸锁止弧又将凹锁止弧锁住,从而使槽轮静止不动。因此,当主动拨盘作连续转动时,槽轮被驱动作单向的间歇转动。 (2)槽轮的特点 构造简单,外形尺寸小; 机械效率高,并能较平稳地,间歇地进行转位; 但因传动时存在柔性冲击,故常用于速度不太高的场合。 槽轮机构的类型及应用 (1)槽轮机构的类型(Type of Geneva Mechanism) 外槽轮机构:运动时,拨盘与槽轮为异向回转。 内槽轮机构:运动时,拨盘与槽轮为同向回转。 两种机构均用于平行轴之间的间歇传动。 (2)槽轮机构的应用举例(Application Sample of Geneva Mechanism) 外槽轮机构被广泛应用于电影放映机中。
(3)球面槽轮机构(Sphere Geneva Mechanism) 当需要在两相交轴之间进行间歇传动时,可采用球面槽轮机构。右图为球面槽轮机构。 槽轮机构的运动系数及运动特性 (1)槽轮机构的运动系数k (Motion Factor of Geneva Mechanism) k=td/t 又因拨盘1一般为等速回转,因此时间的比值可以用拨盘转角的比值来表示。可得外槽轮机构运动系数的另一表达式: 由于运动系数k应大于零,所以由上式可知外槽轮径向槽的数目z应大于3。又由上式可知,
1悬架: 悬架模块计算了悬架的运动学特性以及作用在弹簧、减震器、稳定杆上的力。 悬架运动学特性的含义是:轮胎中心的相对位置,轮胎方向,弹簧阻尼减震器的全坐标运动(例如,垂直轮胎的左边(q1)和右边(q2)运动)以及转向栏杆对前悬和后悬造成的位移。通过计算弹簧、阻尼器和减震器的运动来确定它们施加的力。 平顺性运动学将由于悬架弹性引起的有限运动描述为关于轮胎力和扭矩的函数。 悬架运动学由8个查询表格或几何连接点配置而成。柔顺性由查询表格配置而成。运动学和柔顺性查询表格由K&C Tester (Kinematics and Compliances Tester)或者一个如ADAMS/Car Suspension Ki t的悬架分析软件生成。几何连接点包含在悬架设计数据中。 悬架在下面描述的更加详细。通过查询System of Coordinates ( ASM Vehicle Dynamics Addendum)可以获取坐标系统的细节描述。
1.1前悬 前悬子系统计算前悬的运动学,平顺性运动学和悬架在弹簧、阻尼器、减震器上的力。
子系统 悬架动力学是通过对称或不对称查询表格或者几何类型来计算的(McPherson Strut)。在这个模型中的每个悬架动力学系统可以由ASM汽车动力学库的中的相关系统替换。要想获取如何替换悬架动力学的详细信息,可以查找How to Change Suspension Kinematics Model (ASM Vehicle Dynamics Model Description)。悬架平顺性子系统计算弹性位移和方向作为轮胎所受力和扭矩的函数。 有5个变量来计算前悬的悬架动力学:通过对称或不对称查询表格(作为两个或三个变量的函数)或者通过几何描述(McPherson strut)。每个悬架动力学系统都要计算车轮中心,车轮方向和弹簧、阻尼器以及减震器的位移。 1.1.1前悬运动学特性(对称) 在这个模块中计算了车轮中心的位置,车轮方向,弹簧,阻尼器和减震器的的位移。
摘要 本文以捷达EA113汽油机的相关参数作为参考,对四缸汽油机的曲柄连杆机构的主要零部件进行了结构设计计算,并对曲柄连杆机构进行了有关运动学和动力学的理论分析与计算机仿真分析。 首先,以运动学和动力学的理论知识为依据,对曲柄连杆机构的运动规律以及在运动中的受力等问题进行详尽的分析,并得到了精确的分析结果。其次分别对活塞组、连杆组以及曲轴进行详细的结构设计,并进行了结构强度和刚度的校核。再次,应用三维CAD软件:Pro/Engineer建立了曲柄连杆机构各零部件的几何模型,在此工作的基础上,利用Pro/E软件的装配功能,将曲柄连杆机构的各组成零件装配成活塞组件、连杆组件和曲轴组件,然后利用Pro/E软件的机构分析模块(Pro/Mechanism),建立曲柄连杆机构的多刚体动力学模型,进行运动学分析和动力学分析模拟,研究了在不考虑外力作用并使曲轴保持匀速转动的情况下,活塞和连杆的运动规律以及曲柄连杆机构的运动包络。仿真结果的分析表明,仿真结果与发动机的实际工作状况基本一致,文章介绍的仿真方法为曲柄连杆机构的选型、优化设计提供了一种新思路。 关键词:发动机;曲柄连杆机构;受力分析;仿真建模;运动分析;Pro/E
ABSTRACT This article refers to by the Jeeta EA113 gasoline engine’s related parameter achievement, it has carried on the structural design compution for main parts of the crank link mechanism in the gasoline engine with four cylinders, and has carried on theoretical analysis and simulation analysis in computer in kinematics and dynamics for the crank link mechanism. First, motion laws and stress in movement about the crank link mechanism are analyzed in detail and the precise analysis results are obtained. Next separately to the piston group, the linkage as well as the crank carries on the detailed structural design, and has carried on the structural strength and the rigidity examination. Once more, applys three-dimensional CAD software Pro/Engineer establishing the geometry models of all kinds of parts in the crank link mechanism, then useing the Pro/E software assembling function assembles the components of crank link into the piston module, the connecting rod module and the crank module, then using Pro/E software mechanism analysis module (Pro/Mechanism), establishes the multi-rigid dynamics model of the crank link, and carries on the kinematics analysis and the dynamics analysis simulation, and it studies the piston and the connecting rod movement rule as well as crank link motion gear movement envelopment. The analysis of simulation results shows that those simulation results are meet to true working state of engine. It also shows that the simulation method introduced here can offer a new efficient and convenient way for the mechanism choosing and optimized design of crank-connecting rod mechanism in engine. Key words: Engine;Crankshaft-Connecting Rod Mechanism;Analysis of Force;Modeling of Simulation;Movement Analysis;Pro/E
平面四杆机构的运动仿真模型分析1前言 平面四杆机构是是平面连杆机构的基础,它虽然结构简单,但其承载能力大,而且同样能够实现多种运动轨迹曲线和运动规律,因而在工程实践中得到广泛应用。 平面四杆机构的运动分析, 就是对机构上某点的位移、轨迹、速度、加速度进行分析, 根据原动件的运动规律, 求解出从动件的运动规律。平面四杆机构的运动设计方法有很多,传统的有图解法、解析法和实验法。随着计算机技术的飞速发展,机构设计及运动分析已逐渐脱离传统方法,取而代之的是计算机仿真技术。本文在UG NX5环境下对平面四杆机构进行草图建模,通过草图中的尺寸约束、几何约束及动画尺寸等功能确定各连杆的尺寸,之后建立相应的连杆、运动副及运动驱动,对建立的运动模型进行运动学分析,给出构件上某点的运动轨迹及其速度和加速度变化规律曲线,文章最后简要分析几个应用于工程的平面四杆机构实例。 2平面四杆机构的建模 问题的提出 平面四杆机构因其承载能力大,可以满足或近似满足很多的运动规律,所以其应用非常广泛,本文以基于曲柄摇杆机构的物料传送机构为例,讨论其建模及运动分析。 如图1所示,ABCD为曲柄摇杆机构,曲柄AB为主动件,机构在运动中要求连杆BC的延伸线上E 点保持近似直线运动,其中直线轨迹为工作行程,圆弧轨迹为回程或空程,从而实现物料传送的功能。
平面四杆机构的建模 由于物料传送机构为曲柄摇杆机构,所以它符合曲柄存在条件。根据机械原理课程中的应用实例[1],选取AB=100,BC=CD=CE=250,AD=200,单位均为毫米。 在UG NX5的Sketch环境里,创建如图2所示的草图,并作相应的尺寸约束和几何约束,其中EE'为通过E点的水平轨迹参考线,用以检验E点的工作行程运动轨迹。现通过草图里的尺寸动画功能,令AB与AD 的夹角从0°到360°变化,可看到E点的变化轨迹为直线和圆弧,如图3所示为尺寸动画的四个截图,其中图3(a)中的E点为水平轨迹的起点,图3(b)中的E点为水平轨迹的中点,图3(c)中的E点为水平轨迹的终点,而图3(d)中的E点为圆弧轨迹(图中未画出)即回程的中点。
一、填空题: 1.平面连杆机构是由一些刚性构件用低副连接组成的。 2.由四个构件通过低副联接而成的机构成为四杆机构。 3.在铰链四杆机构中,运动副全部是转动副。 4.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 6.在铰链四杆机构中,与连架杆相连的构件称为连杆。 7.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 8.对心曲柄滑快机构无急回特性。9.偏置曲柄滑快机构有急回特性。 10.对于原动件作匀速定轴转动,从动件相对机架作往复运动的连杆机构,是否有急回特性,取决于机构的极位夹角是否大于零。 11.机构处于死点时,其传动角等于0。12.机构的压力角越小对传动越有利。 13.曲柄滑快机构,当取滑块为原动件时,可能有死点。 14.机构处在死点时,其压力角等于90o。 15.平面连杆机构,至少需要4个构件。 二、判断题: 1.平面连杆机构中,至少有一个连杆。(√) 2.平面连杆机构中,最少需要三个构件。(×) 3.平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。(√) 4.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 5.有死点的机构不能产生运动。(×) 6.机构的压力角越大,传力越费劲,传动效率越低。(√) 7.曲柄摇杆机构中,曲柄为最短杆。(√) 8.双曲柄机构中,曲柄一定是最短杆。(×) 9.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 10.平面连杆机构中,压力角的余角称为传动角。(√) 11.机构运转时,压力角是变化的。(√) 三、选择题: 1.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A <=; B >=; C > 。 2.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而充分条件是取 A 为机架。 A 最短杆或最短杆相邻边; B 最长杆; C 最短杆的对边。3.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时,有两