投标人接口部分使用说明
投标人接口部分使用说明
投标人接口部分主要功能是:
1:将各单位工程清单导出。
2:将清单生成的MDB文件导入到接口。
3:对清单进行五统一检测,以及算术错误检测。
4:生成评标系统能够接收的评标文件。
其操作步骤如下:
一、安装投标人接口
将从管理部门拿到的光盘中的安装程序安装到电脑后,就可以在桌面上看到一个某某工程工程接口的图标:
双击图标进入软件如图:
在这里我门可以看到该项目工程的工程结构都已经非常清楚。
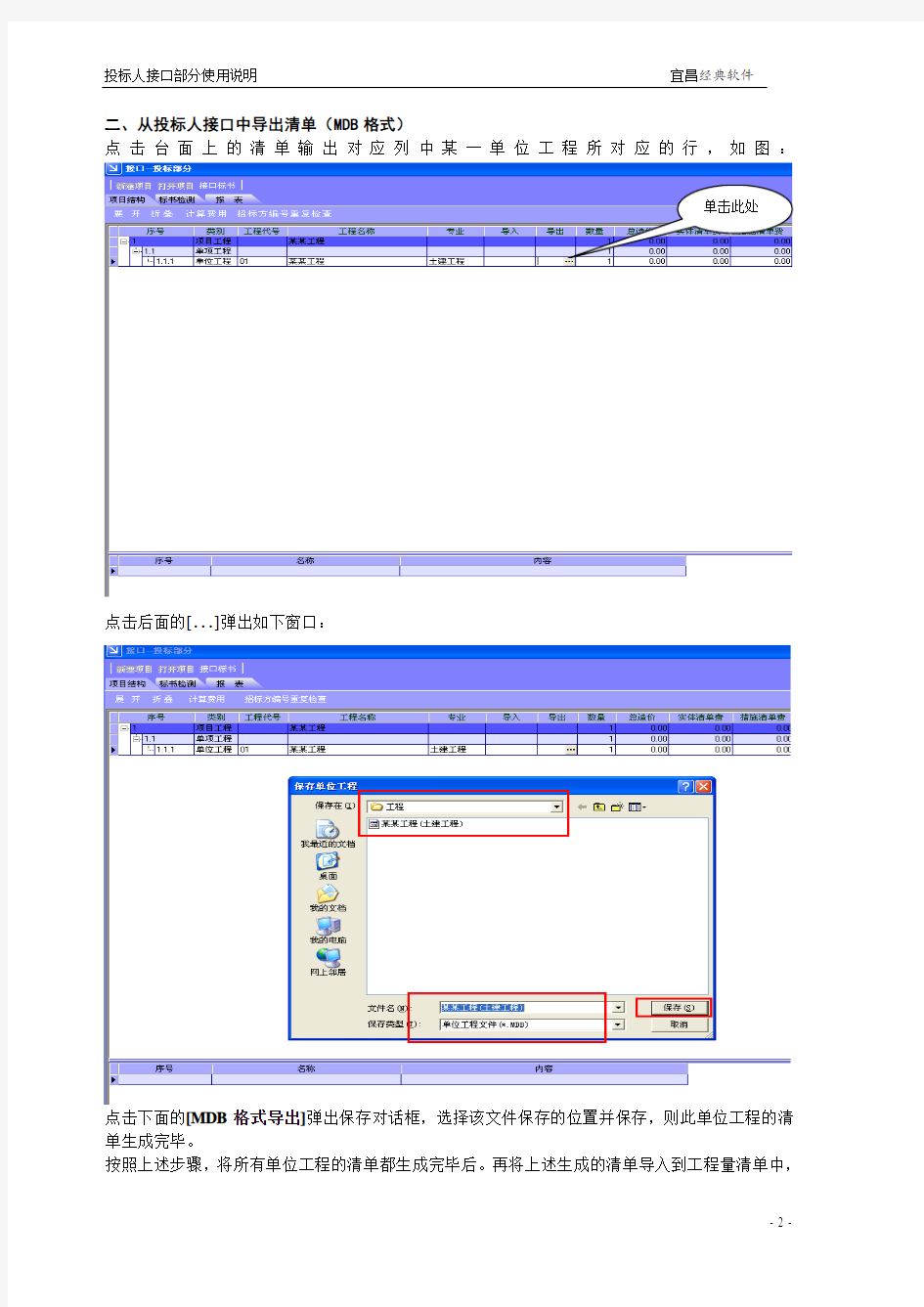
二、从投标人接口中导出清单(MDB 格式)
点击台面上的清单输出对应列中某一单位工程所对应的行,如图:
点击后面的[…]
弹出如下窗口:
点击下面的[MDB 格式导出]弹出保存对话框,选择该文件保存的位置并保存,则此单位工程的清单生成完毕。
按照上述步骤,将所有单位工程的清单都生成完毕后。再将上述生成的清单导入到工程量清单中,单击此处
(经典软件宜昌6.1.001版)。套完价之后,生成[MDB]格式文件,将所有的单位工程生成完之后,打开评标接口,点击[报价输入]对应列中的某一单位工程对应的行,如下图,点击[…]弹出打开对话框,选择套完价后从清单中生成的MDB 格式的文件,点击确定。
报价输入
三、将从接口中导出的清单导进套价系统后套价,将套价软件生成的MDB文件导入接口。
将所有单位工程的数据都导入到接口后如图:
点击标题栏中的[计算费用],则各单位工程的总报价都可以很清楚的看到。
在此可以检测总价是否与书面清单生成的总价是否一致。
四、错误检测
点击标题栏中的[标书检测]来对报价中的五统一和算术错误进行检测,此过程必须走,否则不允许生成评标文件,如下图,分别点击每个单位工程,再分别对各个单位工程进行检测,
如果没有错误,下面对话框中将有检测无错误提示,如果有什么错误,提示框中将会提示所有错误详细信息。
如果有错误,可以在计价软件中改正后再导入到接口。
五、报表打印。
接口里面可以打印投标总价表。
五、生成评标书。
所有单位工程都进行了算术检测后,就可以生成评标文件了。操作如下
点击标题栏中的[接口标书]弹出如下对话框,点击[生成评标书]:
评标书生成完之后,点击[保存]将评标文件导出到其他地方刻录。
在接口中生成的电子评标书后缀名为.DHF。刻录完后一定要检测此文件是否在光盘中。
至此,投标人所需要做的工作全部完成。
注:使用经典软件计价6.1.001版本的投标单位,如果此工程有土建一个单位工程,那投标光盘刻录文件应该有如下:
1:计价中后缀名为GDB的原文件。
此工程中应有一个文件(某某某工程土建工程)。
2:由计价软件生成的后缀名为MDB的接口文件。
此工程中应有一个文件(某某某工程土建工程)。
3:由投标人接口生成的后缀名为.DHF的评标文件一个。
(有几个单位工程就需生成几个MDB文件,DHF始终为一个)
完整版服务器安装说明
完整版服务器安装说明(车辆定位+人员定位) 一、“完整版服务器”安装要求 1. 操作系统要求:Windows Server 2003 操作系统 2. 数据库要求:SQL Server2000 / 2005 / 2008 3.“GPS监控服务器”需要打开的端口:89、1501、6969、6767、2099 “人员定位服务器”需要打开的端口:89、1504、7979、7878 二、下载“完整版服务器”安装程序 登录EXLIVE主网站,在“下载中心—> 服务器端—> 完整安装包”中,点击“完整安装包”下载安装程序(如图1)。
图1 三、安装“完整版服务器” 下载完成后,双击,进入安装界面(如图2、3) 图2
图3 点击,进入“许可证协议”(如图4) 图4 仔细阅读协议后,点击进入客户信息界面,如图5
图5 填写客户信息,如:用户名,公司名称,序列号(默认即可)等,点击,进入目的地文件夹选择界面(如图6) 图6 选择安装位置后,点击,系统自动生成EXLIVE定位服务平台文件夹,如图7
图7 点击,进入安装状态(如图8) 图8 待服务器程序安装完成(如图9);
图9 点击,进入“EXLIVE定位服务平台系统配置” 界面(如图10)。 四、配置“EXLIVE定位服务平台系统”参数 1.数据库连接参数配置(如图10) >> 数据库类型:根据客户服务器数据库安装程序不同,选择不同数据库类型SQL Server 2000 / 2005 / 2008 >> 服务器地址:数据库所在服务器的IP地址 >> 数据库名称:默认gserver_synth(车辆定位数据库),pgps(人员定位数据库) >> 登录用户,密码:连接数据库的账号及密码 >> 附加数据库:是否将数据库模板附加到用户数据库中,第一次安装,必须选择该项 >> 启动服务器(车辆、人员):选中此项,服务器安装成功后,程序会自动启动车辆定位服务器和人员定位服务器。
接口调用说明文档
XXX)科技有限公司 数据接口 2015-5-26
目录 第1章引言. ......................................................... 错误!未定义书签。 背景. ........................................................... 错误!未定义书签。 第2章接口与数据定义. ................................................... 错误!未定义书签。 曝光台查询接口. ..................................................... 错误!未定义书签。 曝光台列表查询.......................... 错误!未定义书签。 曝光台详情查询.......................... 错误!未定义书签。 信用公示查询接口定义.......................... 错误!未定义书签。 守信公示列表查询.......................... 错误! 未定义书签。 守信公示详情查询.......................... 错误!未定义书签。 失信公示列表查询.......................... 错误!未定义书签。 失信公示详情查询.......................... 错误!未定义书签。 企业名称查询接口定义.......................... 错误!未定义书签。 Webservice 方法定义 ........................ 错误! 未定义书签。 请求参数. .................................................... 错误! 未定义书签。 返回数据. .................................................... 错误!未定义书签。 企业信息查询接口定义.......................... 错误!未定义书签。 Webservice 方法定义 ........................ 错误! 未定义书签。 请求参数. .................................................... 错误! 未定义书签。 返回数据. .................................................... 错误!未定义书签。
机器人操作说明
安全 (1) 1).注意事项 (1) 2) ........................................................................................................................................................................... .以下场合不可使用机器人. (1) 3).安全操作规程 (1) 1.机器人基本操作说明 (2) 1.1 机器人显示屏说明 (3) 1.2机器人自动运行条件 (5) 1. 3 程序的创建、复制、删除 (6) 1.4 程序编辑 (11) 1.5 机器人数据备份及恢复 (18) 1.6 机器人基本设臵 (23) 1.7 报警查看 (30) 1.8 I/O 操作 (31) 1.9 码跺编辑 (33) 1.10 位臵修改 (38)
安全 1). 注意事项 1. FANUC 机器人所有者、操作者必须对自己,机器人周边人员和设备的安全负责。FANUC 不对错误使用机器人的安全问题负责。FANUC 提醒用户在使用FANUC 机器人时必须使用安全设备,必须遵守安全条款。 2. FANUC 机器人程序的设计者、机器人系统的设计和调试者、安装者必须熟悉FANUC 机器人的编程方式和系统应用及安装。 3. FANUC 机器人和其他设备有很大的不同,在于机器人可以以很高的速度移动很大的距离。 2). 以下场合不可使用机器人 1, 燃烧的环境 2. 有爆炸可能的环境 3. 无线电干扰的环境 4. 水中或其他液体中 5. 运送人或动物 6. 攀附 7. 其他 !FANUC 公司不为错误使用的机器人负责。 3).安全操作规程 3.1). 示教和手动机器人 1)禁止带手套操作示教盘和操作盘。 2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。 3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。 4)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。 5)机器人周围区域必须清洁、无油,水及杂质等。 3.2). 生产运行 1)在开机运行前,须清楚了解机器人根据所编程序将要执行的全部任务。 2)必须清楚了解所有会左右机器人移动的开关、传感器和控制信号的位臵和状态。 3)必须清楚了解机器人控制器和外围控制设备上的紧急停止按钮的位臵,准备在紧急情况下使用这些按钮。 4)永远不要认为机器人没有移动其程序就已经完成。因为这时机器人有可能是在等待让它继续移动的输入信号。
锋云服务器产品使用说明书
锋云服务器产品使用说明书
目录 第一章产品说明 (1) 一、概述 (1) 二、硬件技术指标 (1) 1.主要固件 (1) 2.稳定性 (1) 3.运行环境 (1) 4.其他 (2) 三、系统软件技术指标 (2) 1.视频点播 (2) 2.稳定性 (2) 3.外设支持 (2) 4.易用性容错性 (2) 第二章外观说明 (3) 一、外观接口说明 (3) 1.前面板说明 (3) 2.后挡板说明 (4) 第三章使用说明 (5) 一、服务器硬盘制作管理工具介绍 (5) 1.工具概述 (5) 2.运行环境 (5) 3.运行方式 (5) 4.准备工作 (6) 5.制作服务器硬盘 (6) 选择磁盘设备 (6) 更换磁盘设备 (7) 开始制作 (7) 二、设置向导 (12) 三、授权工具 (18) 四、系统设置 (20) 五、服务管理器设置 (24) 六、KTV曲库管理工具 (27) 1.系统概述 (27) 2.运行环境 (28) 3.运行方式 (28) 4.各个模块的使用方法 (28) (一)系统工具模块 (28) 1.数据库配置工具 (28) 2.数据库升级工具 (29) 3.歌词包更新工具 (30) 4.歌词检索工具 (32) (二)曲库管理模块 (32) 1.服务器管理 (33) 2.曲库路径管理 (34)
3.歌曲库管理 (36) 4.歌曲文件管理 (42) 5.歌星库管理 (45) 6.新歌列表 (48) 7.公播列表 (49) 8.VIP列表 (49) 9.情景歌曲列表 (49) 10.电影管理 (50) (三)系统设置模块 (51) 1.歌曲类型设置 (51) 2.歌曲语种设置 (52) 3.歌曲版本设置 (52) 4.歌星类型设置 (53) 5.VIP歌曲类型设置 (54) 6.情景类型设置 (54) 7.电影类型设置 (55) 8.系统参数设置 (56) 七、配置包厢信息 (57) 八、文件浏览器 (61) 九、监控中心 (63) 十、自动升级功能介绍 (64) 1.功能概述 (64) 2.运行环境 (64) 3.运行方式 (64) 4.准备工作 (64) 5.制作升级U盘 (65) 6.系统升级 (65) 十一、用户管理 (68) 十二、控制终端 (70) 十三、telnet工具 (72) 十四、任务管理器 (77) 十五、文本编辑器 (81) 十六、磁盘健康管理工具 (82) 十七、日期和时间设置 (84) 第四章常见问题与解答(FAQ) (85) 1.为什么锋云服务器是云服务器? (85) 2.锋云服务器的优势是什么? (85) 3.锋云服务器硬盘要怎么初始化? (86) 4.锋云服务器是否有系统备份功能? (86) 5.锋云服务器能挂载多少个硬盘,支持多大容量的硬盘? (86) 6.锋云服务器是否存在目前系统负载均衡隐患? (86) 7.锋云服务器对多语种是否支持? (86) 8.锋云服务器上电到正常工作需要多少时间? (87) 9.锋云服务器的负载极限是多少并发? (87)
帝国CMS版接口说明
帝国CMS接口使用手册 一、简介 1、本接口应用于帝国CMS 版新闻系统模型的栏目文章发布; 2、本接口可以自动生成文章、栏目、首页等静态HTML页面; 3、本接口可以生成随机点击数,详见发布接口参数说明; 4、发布时请使用管理员用户帐号; 5、在帝国CMS utf8版使用本接口时,请在发布规则中选择编码为UTF-8; 6、本接口基于帝国CMS UTF8版制作,适用于帝国CMS GBK/utf-8等版本,应用于其他版本时请自行测试调整;; 7、接口文件无须任何改动即可使用,如果你希望增加校验或其他功能,请仔细修改; 8、2个接口文件请复制在网站 /e/admin目录下使用; 二、安装接口 在接口文件夹中找到接口文件,如图: 请将、等接口文件上传到指定目录,请使用二进制方式上传,如图: 三、配置发布规则 1、将范例发布规则文本导入ET2发布配置,或使用软件内置发布规则范例,如图:
2、将检查网址和发布网址中的“您的网站”改为您要发布的网站网址,如图: 3、在检查网址填上您要发布的栏目ID,如图: 4、在参数取值页,填上您要发布的网站栏目ID,如图: 这里查看栏目ID:
4、填上您的管理账号、密码,注意格式,如图: 四、接口说明 一、检查接口 1、接口文件名,为保密,请自行修改文件名; 2、本接口文件复制在网站/e/admin目录使用,如果目录名有变更,请自行对应; 3、主要参数 keyboard 文章标题 classid 栏目ID,用于指定检查栏目,可在后台网站栏目管理处查看; vercode 校验码,请自行设定,并在检查接口文件开始处修改$vercode 使其一致; 4、发布配置-文章检查网址处,可以如下填写: 注:使用大小写敏感的服务器的用户请注意网址大小写和网站文件一致 5、接口文件无须任何改动即可使用,如果你希望增加校验或其他功能,请仔细修改; 二、发布接口 1、接口文件名,为保密,请自行修改文件名; 2、本接口文件请复制在网站/e/admin目录下使用,为保密,请自行修改文件名;
机器人操作调节说明书
机器人操作调节说明 1.开启机器人电箱电源,待机器人启动完毕后将将选择开关扭至手动模式,机器人处于手动工作状态;2.程序说明: a.nWheelH1放下高度 b.nWheelH2抓取高度 c.nWheelD扫粉深度(高度) d.wobjCnv1固化线解码器(坐标) e.wobjCnv2喷粉线解码器(坐标) f.tool_Grip机器人坐标 g.phome机器人原点位置 h.pReady1机器人准备位置1 i.pcln1机器人清扫位置1 j.pReady2机器人准备位置2 k.Pick机器人抓取位置 l.pLeave机器人离开位置 m.Dplace机器人放下位置 n.rOpenGripper打开夹爪 o.rCloseGripper放开夹爪 3.机器人启动完毕,按一下左上角ABB,弹出选择目录,可进入不同控制目录; 4.选择程序调试,进入各单元程序,可手动调节及测试各单元程序及位置点; 进入程序调试后选择phome,运行程序为使机器人回原点,修改phome位置为改变原点位置; 选择TSingle为校正追踪固化线输送机及追踪喷粉线输送机,具体操作步骤为: 开启固化线输送机后单步运行程序 DeactUnit CNV1; DropWObj wobjCnv1; ActUnit CNV1; 跳步将PP移至WaitWObj wobjCnv1;时连续执行程序 待出现警报立即停止固化线输送机,停止运行程序可手动操纵机器人到固化线轮毂放下位置,修改相应位置; 再次运行一次该程序,正常后完成放下轮毂位置的设定; 关于追踪喷粉线输送机位置的步骤如上; 注意:同步感应开关位置不能变更!!! 选择ClnWheel为校正清扫位置,设定好相应位置后,修改相应位置;
接口使用说明文档
中国移动短信网关 SP端接口使用手册 China Mobile Shot Message Gateway Interface for SP Manual 作者:沈岗 日期:2004年1月 版本:V1.2
一、CMSMIF.CMPPApp 简要说明: 该类采用CMPP协议(V2.0)实现了SP端与移动短信网关的连接处理。 本类中,采用长连接方式与ISMG通讯。通信双方以客户-服务器方式建立TCP连接,用于双方信息的相互提交。当信道上没有数据传输时,通信双方应每隔时间C发送链路检测包以维持此连接,当链路检测包发出超过时间T后未收到响应,立即再发送链路检测包,再连续发送N-1次后仍未得到响应则断开此连接。参数C、T、N可通过属性配置。 消息发送时采用并发方式,即发送一条消息不等待网关回复确认,继续向网关发送短信,这样发送消息速度非常快,完全取决于网关的处理速度及网络速度。为避免消息丢失,同时采用了滑动窗口流量控制,窗口大小可通过属性设置。 消息接收、网络断开等采用事件触发方式,不需应用程序轮询,在此接口基础之上编程方便。 类中运用了多线程技术,如一条线程处理发送网络包,而另一条线程处理从网关上接收网络包,其他还有一些线程处理检测包、网络连接情况监测等,使程序思路明确、执行效率很高、运行非常稳定。 (一)属性 1.ActiveInterval 说明:检测包发送时间间隔,单位:毫秒。默认值为120000,即120秒。为上 述类说明中的C参数。 2.MaxNetworkPackSize 说明:与ISMG通讯时最大网络包大小,单位:字节。默认值为512Byte。 3.MaxRetryTimes 说明:网络超时最大重发次数,单位:次。默认值为3次。为类说明中的N。 4.OverTime 说明:网络包发送超时时间,单位:毫秒,超过此值还未收到回复则重发。默认值 为60000,即60秒。为类说明中的T。 5.QueueLength 说明:网络队列大小,单位:个,默认值为20。为类说明中的滑动窗口大小, 以控制发送流量。 (二)方法 1.ConnectToIsmg 方法说明: 连接到远程短信网关ISMG上,只有连接到远程短信网关上,才可进行短信收发操作。 在本操作中,自动初始化本地Socket,以连接到指定IP服务器的指定端口上。 声明原型:int ConnectToIsmg(string ServerIP,int Port,string SP_ID,string Secret,string SN) 参数说明: ServerIP:远程短信网关服务器的IP地址,如211.138.200.51 Port:远程短信网关服务器的端口号,如7890 SP_ID:企业服务代码
机器人操作指南
第七章工业机器人应用 一机器人示教单元使用 1.示教单元的认识 2.使用示教单元调整机器人姿势 2.1在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL”位置,双手拿起,先将示教单元背部的“TB ENABLE”按键按下。再用手将“enable”开关扳向一侧,直到听到一声“卡嗒”为止。然后按下面板上的“SERVO”键使机器人伺服电机开启,此时“F3”按键上方对应的指示灯点亮。
2.2按下面板上的“JOG”键,进入关节调整界面,此时按动J1--J6关节对应的按键可使机器人以关节为运行。按动“OVRD↑”和“OVRD↓”能分别升高和降低运行机器人速度。各轴对应动作方向好下图所示。当运行超出各轴活动范围时发出持续的“嘀嘀”报警声。 2.3按“F1”、“F2”、“F3”、“F4”键可分别进行“直交调整”、“TOOL调整”、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示:
直交调整模式TOOL调整模式
三轴直交调整模式
圆桶调整模式 2.4在手动运行模式下按“HAND”进入手爪控制界面。在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT-900――OUT-907进行控制,与之相应的还有八路输入信号IN-900――IN-907,以上各I/O信号可在程序中进行调用。 按键“+C”和“-C”对应“OUT-900”和“OUT-901” 按键“+B”和“-B”对应“OUT-902”和“OUT-903” 按键“+A”和“-A”对应“OUT-904”和“OUT-905” 按键“+Z”和“-Z”对应“OUT-906”和“OUT-907” 在气源接通后按下“-C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN-900”;按下“+C”键,对应“OUT-900”输出信号,控制电磁阀动作使手爪张开。对应的手爪张开磁性传感器点亮,输入信号到“IN-901”。 3.使用示教单元设置坐标点 3.1先按照实训2的内容将机器人以关节调整模式将各关节调整到如下所列: J1:0.00 J5:0.00 J2: -90.00 J6:0.00 J3:170.00 J4:0.00 3.2先按“FUNCTION”功能键,再按“F4”键退出调整界面。然后按下“F1”键进入