
车牌识别系统的设计
1.摘要:
汽车牌照自动识别系统是制约道路交通智能化的重要因素, 包括车牌定位、字符分割和字符识别三个主要部分。本文首先确定车辆牌照在原始图像中的水平位置和垂直位置, 从而定位车辆牌照,然后采用局部投影进行字符分割。在字符识别部分, 提出了在无特征提取情况下基于支持向量机的车牌字符识别方法。实验结果表明, 本文提出的方法具有良好的识别性能。随着公路逐渐普及,我国的公路交通事业发展迅速,所以人工管理方式已经不能满着实际的需要,微电子、通信和计算机技术在交通领域的应用极大地提高了交通管理效率。汽车牌照的自动识别技术已经得到了广泛应用。
2.设计目的:1、使学生在巩固理论课上知识的同时,加强实践能力的提高,理论联系实践。2、激发学生的研究潜能,提高学生的协作精神,锻炼学生的动
手能力。
3.设计原理
由于车辆牌照是机动车唯一的管理标识符号,在交通管理中具有不可替代的作用,因此车辆牌照识别系统应具有很高的识别正确率,对环境光照条件、拍摄位置和车辆行驶速度等因素的影响应有较大的容阈,并且要求满足实时性要求。
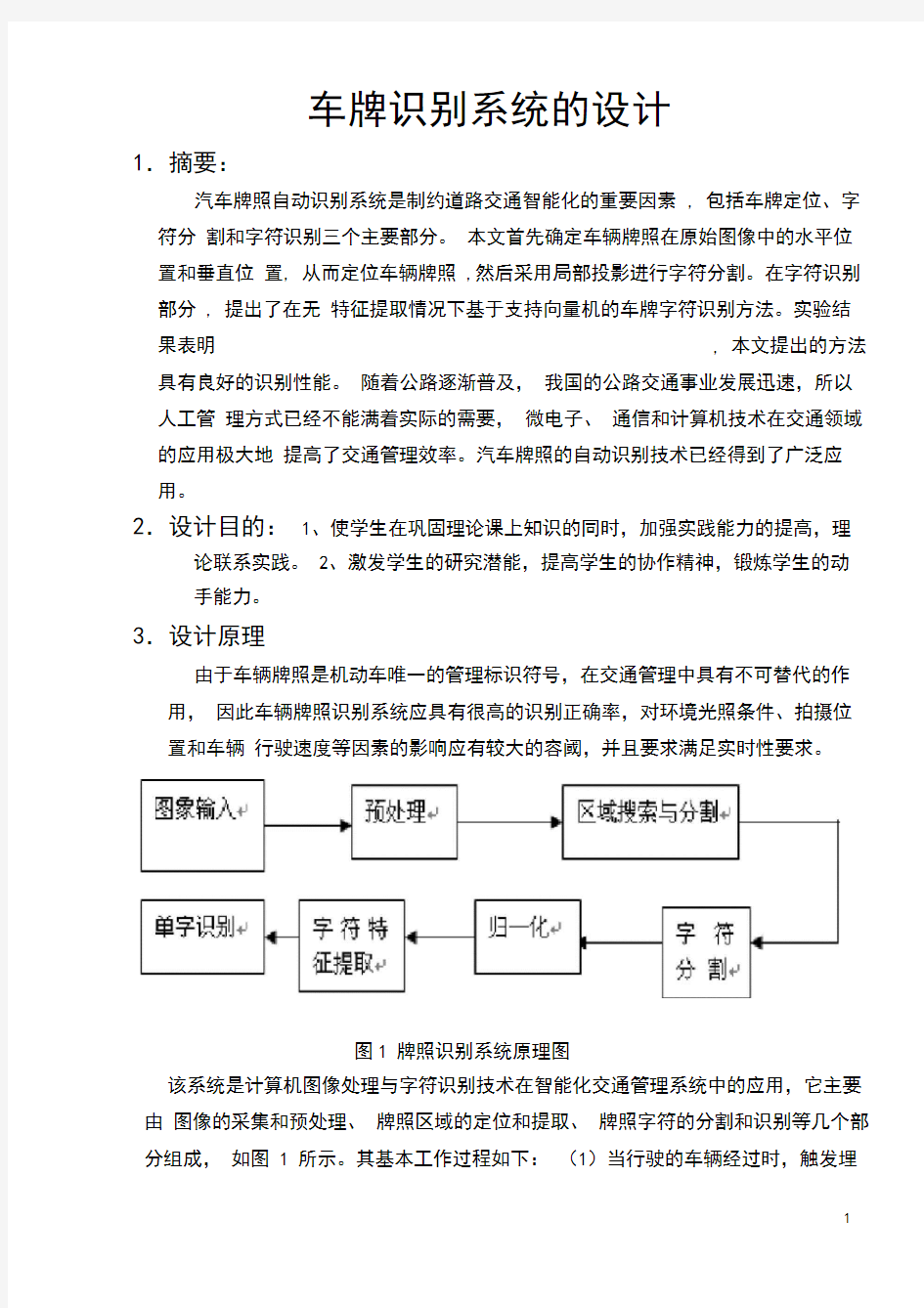
图1 牌照识别系统原理图
该系统是计算机图像处理与字符识别技术在智能化交通管理系统中的应用,它主要由图像的采集和预处理、牌照区域的定位和提取、牌照字符的分割和识别等几个部分组成,如图 1 所示。其基本工作过程如下:(1)当行驶的车辆经过时,触发埋
设在固定位置的传感器,系统被唤醒处于工作状态;一旦连接摄像头光快门的光电传感器被触发,设置在车辆前方、后方和侧面的相机同时拍摄下车辆图像;
2)由摄像机或CCD 摄像头拍摄的含有车辆牌照的图像通视频卡输入计算机进行预处
理,图像预处理包括图像转换、图像增强、滤波和水平较正等;
(3)由检索模块进行牌照搜索与检测,定位并分割出包含牌照字符号码的矩形区域;(4)对牌照字符进行二值化并分割出单个字符,经归一化后输入字符识别系统进行识别。4.详细设计步骤
4.1提出总体设计方案。
车辆牌照识别整个系统主要是由车牌定位和字符识别两部分组成,其中车牌定位又可以分为图像预处理及边缘提取模块和牌照的定位及分割模块;字符识别可以分为字符分割与特征提取和单个字符识别两个模块。
为了用于牌照的分割和牌照字符的识别,原始图象应具有适当的亮度,较大的对比度和清晰可辩的牌照图象。但由于该系统的摄像部分工作于开放的户外环境,加之车辆牌照的整洁度、自然光照条件、拍摄时摄像机与牌照的矩离和角度以及车辆行驶速度等因素的影响,牌照图象可能出现模糊、歪斜和缺损等严重缺陷,因此需要对原始图象进行识别前的预处理。
牌照的定位和分割是牌照识别系统的关键技术之一,其主要目的是在经图象预处理后的原始灰度图象中确定牌照的具体位置,并将包含牌照字符的一块子图象从整个图象中分割出来,供字符识别子系统识别之用,分割的准确与否直接关系到整个牌照字符识别系统的识别率。
由于拍摄时的光照条件、牌照的整洁程度的影响,和摄像机的焦距调整、镜头的光学畸变所产生的噪声都会不同程度地造成牌照字符的边界模糊、细节不清、笔划断开或粗细不均,加上牌照上的污斑等缺陷,致使字符提取困难,进而影响字符识别的准确性。因此,需要对字符在识别之前再进行一次针对性的处理。
车牌识别的最终目的就是对车牌上的文字进行识别。主要应用的为模板匹配方法。因为系统运行的过程中,主要进行的都是图像处理,在这个过程中要进行大量的数据处理,所以处理器和内存要求比较高,CPU要求主频在600HZ及以上,内存在128MB及以上。系统可以运行于Windows98、Windows2000或者Windows XP操作系统下,程序调试时使用matlab 。
4.2预处理及边缘提取
图2 预处理及边缘提取流程图
4.2.1 图象的采集与转换
考虑到现有牌照的字符与背景的颜色搭配一般有蓝底白字、黄底黑字、白底红字、绿 底白字和黑底白字等几种, 利用不同的色彩通道就可以将区域与背景明显地区分出来, 例 如,对蓝底白字这种最常见的牌照,采用蓝色 B 通道时牌照区域为一亮的矩形,而牌照 字符在区域中并不呈现。因为蓝色( 255,0,0)与白色( 255, 255,255)在 B 通道中 并无区分,而在 G 、R 通道或是灰度图象中并无此便利。同理对白底黑字的牌照可用 R 通 道,绿底白字的牌照可以用 G 通道就可以明显呈现出牌照区域的位置,便于后续处理。 原图、灰度图及其直方图见图 2 与图 3。对于将彩色图象转换成灰度图象时,图象灰度值 可由下面的公式计算:
G=0.110B+0.588G+0.302R
1) 2)
图4 灰度图
输入车牌图
G= B G R
3
图3 原
4.2.2 边缘提取
边缘是指图像局部亮度变化显著的部分, 是图像风、 纹理特征提取和形状特征提取等图 像分析的重要基础。 所以在此我们要对图像进行边缘检测。 图象增强处理对图象牌照的可辩 认度的改善和简化后续的牌照字符定位和分割的难度都是很有必要的。 增强图象对比度度的
方法有:灰度线性变换、图象平滑处理等。
(1)灰度校正
由于牌照图象在拍摄时受到种种条件的限制和干扰,图象的灰度值往往与实际景物不完 全匹配,这将直接影响到图象的后续处理。 如果造成这种影响的原因主要是由于被摄物体的 远近不同, 使得图象中央区域和边缘区域的灰度失衡, 或是由于摄像头在扫描时各点的灵敏 度有较大的差异而产生图象灰度失真,或是由于曝光不足而使得图像的灰度变化范围很窄。
这时就可以采用灰度校正的方法来处理,增强灰度的变化范围、丰富灰度层次,以达到增强
图象的对比度和分辨率。我们发现车辆牌照图象的
灰度取值范围大多局限在 r=(50,200) 之
间,而且总体上灰度偏低,图象较暗。根据图象处
理系统的条件,最好将灰度范围展开到
s=(0,255) 之间,为此我们对灰度值作如下的变换:
s = T(r) r=[ r min,,r max]
使得S ∈[ S min, S max ],其中, T 为线性变换,
若 r(50,200) 、s(0 ,255)
Smax -Smin
r
r max -r min Smin r max - Smax r min r max-r min 3)
则: S 255 255 50 r- 150 150
1.7r 85 4)
2)平滑处理
对于受噪声干扰严重的图象,由于噪声点多在频域中映射为高频分量,因此可以在通
过低通滤波器来滤除噪声,但实际中为了简化算
法也可以直接在空域中用求邻域平均值的方法莱削弱噪声的影响,这种方法称为图象平滑
处理。例如,某一象素点的邻域 S 有两种表示方法: 8邻域和 4邻域分别对应的邻域平均值为
其中,M 为邻域中除中心象素点 f(i,j) 之外包括的其它象素总数, 对于 4邻域M=4,8 邻
域M=8。然而,邻域平均值的平滑处理会使得图象灰度急剧变化的地方,尤其是物体边缘区 域和字符轮廓等部分产生模糊作用。 为了克服这种平均化引起的图象模糊现象, 我们给中心 点象素值与其邻域平均值的差值设置一固定的阈值, 只有大于该阈值的点才能替换为邻域平 均值,而差值不大于阈值时,仍保留原来的值,从而减少由于平均化引起的图象模糊。
图像中车辆牌照是具有比较显著特征的一块图象区域,这此特征表现在:近似水平的矩 形区域;其中字符串都是按水平方向排列的;在整体图象中的位置较为固定。 正是由于牌照 图象的这些特点,再经过适当的图象变换,它在整幅中可以明显地呈现出其边缘。 边缘提取 是较经典的算法,此处边缘的提取采用的是 Roberts 算子。
图 6 robert 算子边缘检测
由上图可以归纳起来以下方面 :原始图像清晰度比较高, 从而简化了预处理, 结合MATLAB 实验过程,得出不是每一种图像处理之初都适合滤波和边界增强。本次汽车车牌的识别,为 了保存更多的有用信息。
4.3 牌照的定位和分割
牌照的定位和分割是牌照识别系统的关键技术之一, 其主要目的是在经图象预处理后的原
g(i, j) M (i,j) s f (i, j) 5
)