微控制系统综合设计
评语:
考勤(10)守纪(10)过程(40)设计报告(30)答辩(10)总成绩(100)
专业:电气工程及其自动化
班级:
姓名:
学号:
指导教师:
兰州交通大学自动化与电气工程学院
2016 年1 月10日
1设计题目:基于航模的简易遥控器方案设计
本题目是采用单片射频收发芯片——NRF2401和STM32F103RCT6核心板来制作基于航模的简易遥控器设计,以达到市场上航模遥控器的效果。
2总体设计方案
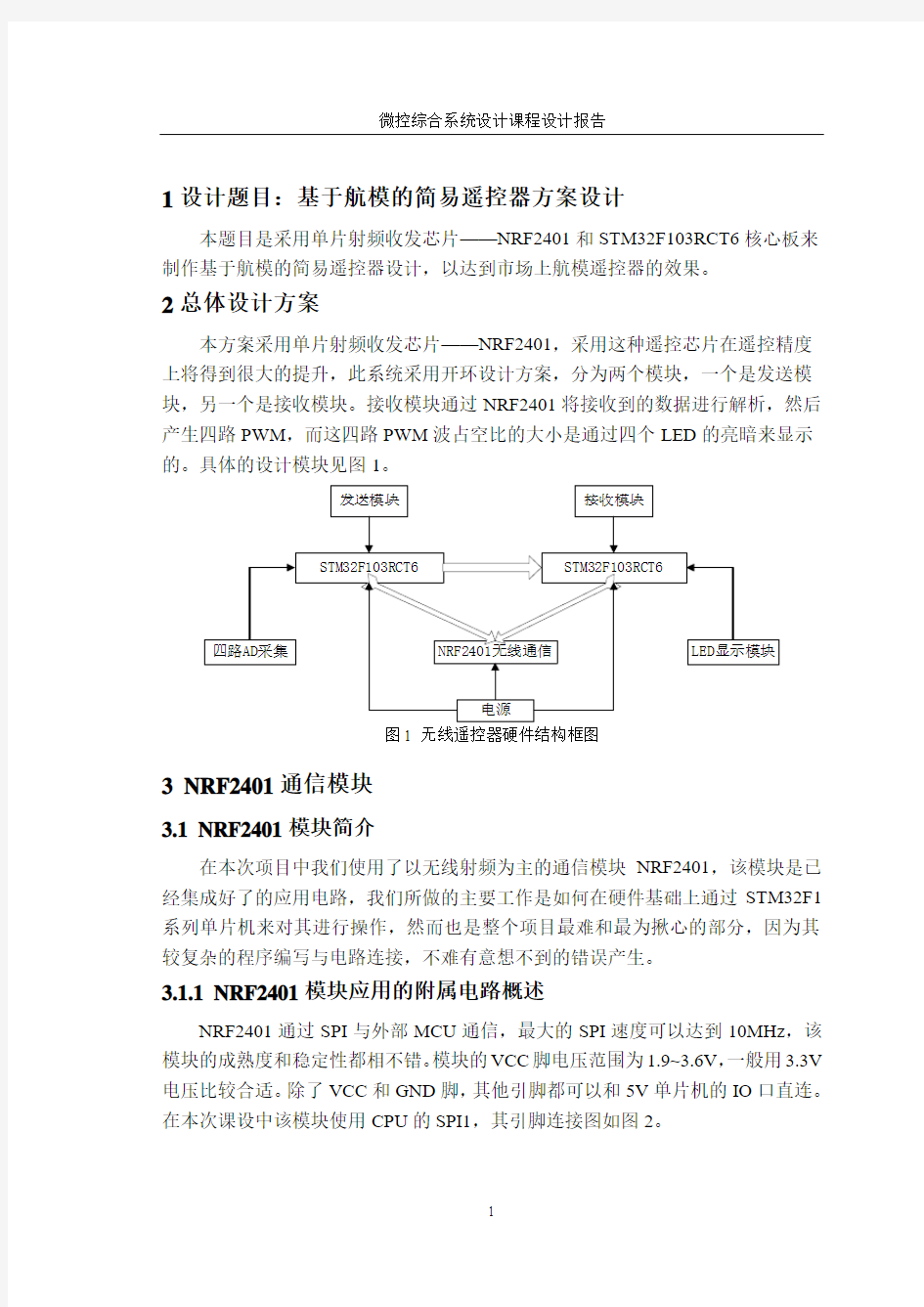
本方案采用单片射频收发芯片——NRF2401,采用这种遥控芯片在遥控精度上将得到很大的提升,此系统采用开环设计方案,分为两个模块,一个是发送模块,另一个是接收模块。接收模块通过NRF2401将接收到的数据进行解析,然后产生四路PWM ,而这四路PWM 波占空比的大小是通过四个LED 的亮暗来显示的。具体的设计模块见图1。
STM32F103RCT6发送模块
STM32F103RCT6
接收模块
NRF2401无线通信电源
四路AD 采集LED 显示模块
图1 无线遥控器硬件结构框图
3 NRF2401通信模块
3.1 NRF2401模块简介
在本次项目中我们使用了以无线射频为主的通信模块NRF2401,该模块是已经集成好了的应用电路,我们所做的主要工作是如何在硬件基础上通过STM32F1系列单片机来对其进行操作,然而也是整个项目最难和最为揪心的部分,因为其较复杂的程序编写与电路连接,不难有意想不到的错误产生。
3.1.1 NRF2401模块应用的附属电路概述
NRF2401通过SPI 与外部MCU 通信,最大的SPI 速度可以达到10MHz ,该模块的成熟度和稳定性都相不错。模块的VCC 脚电压范围为1.9~3.6V ,一般用3.3V 电压比较合适。除了VCC 和GND 脚,其他引脚都可以和5V 单片机的IO 口直连。在本次课设中该模块使用CPU 的SPI1,其引脚连接图如图2。
图2 NRF2401模块接口与STM32连接原理图
3.1.2 NRF2401模块应用思想
首先通过大量的时间对NRF2401的开发文档做了较为详细的研究,并在学习中了解到对于该模块的使用应注意的问题与如何对其进行输入输出操作,当了解这些思想后,立即开始了对软件流程的分析与处理,在综合考虑下,最终用SPI1通道进行无线收发,因为这种模式最容易理解和使用,而且可以最大限度的进行资源的节省。
3.2 NRF2401模块建立通信的程序设计
开始
IO 口初始化、NRF2401寄存器配
置进入待命状态是否接收到发送端信息
发送数据
是否
图3 NRF2401发送端总体流程
1、发送端总体流程详述:
在程序设计中通过对STM32F103的PA1,PA4、PA5、PA6、PA7、PC4的设置来达到与NRF2401上引脚进行相关配置的目的,以实现NRF2401与STM32F103的电气连接,即完成宏定义的设置。完成相关宏定义后,程序会先执行相关端口的输入输出设置。完成端口的初始化后,程序会进入NRF2401的寄存器配置,用以选定通信频率、接收机地址信息、发送方式、有效数据大小等。当整个程序运
行完NRF2401配置时,就进入死循环状态,在此状态下,程序一直处于发送状态。
2、发送端无线射频模式工作流程详述:
由于在前面的寄存器配置时已经将NRF2401配置为无线射频发射模式,所以程序运行到数据发送端时,就会启动无线射频模式,首先确认CE是否为高电平,即判断是否进入射频模式。当CE为高时进入,否则等待其为高。一旦CE为高电平,NRF2401就会进入射频模式,并加载接收机地址与有效数据,此刻数据包如下所示:
ADDR PAYLOAD
图4 数据包
完成接收机地址与有效数据的加载后,NRF2401就会完成CRC检验码的计算,数据包变为如下所示:
ADDR PAYLOAD CRC
图5 CRC检验后的数据包
在完成CRC检验码的计算后,NRF2401会等待CE变低,当CE为低时
NRF2401会自动为上述数据包进行数据序头的添加,于是一个完整的数据包就如下所示:
Preamble ADDR PAYLOAD CRC
图6 添加序头后的数据包
在整个流程完毕前,NRF2401会将数据以250kbps的速率下按照FIFO的规定进行数据的发送,直到数据完全发送才完成一次数据的发送。
开始
IO口初始化、NRF2401寄存器
配置,并开始准备接收数据
否
数据地址码验证
是
开始接收数据并写入数组
接收完毕
图7 NRF2401接收端的流程概况图
3、接收端无线射频模式工作流程详述:
在接收端程序设计中通过对STM32F103的PA1,PA4、PA5、PA6、PA7、PC4的宏定义来驱动NRF2401。整个接收程序前段与发送端相似,即先进行端口的初始化,接着进行NRF2401的寄存器配置,将其设置为接收模式。
4、NRF2401无线射频模块接收模式详述:
在接收数据前,NRF3401会判断其状态是否是无线射频接收,如果不是他会一直等到无线射频接收模式开启,在进入无线射频模式后,NRF2401会读取数据的序头并进行数据输入,由于NRF2401的发送形式是以广播形式为主的,换句话说:他在发送数据时可以有很多的接收设备进行数据接收,所以我们在读取数据前要检查数据的地址为,以保证接收到的数据时正确数据,若地址信息错误,他会重新抓取数据,当地址正确时,就会将数据包中有效的数据与CRC校验码一起读出来,并加以区分,用以检测CRC验证码是否正确的,一旦CRC有误数据都不会有效接收,但前面都为正确状态时,我们可以通过检测DRI的高低来进行数据的接收与停止,即DRI为高电平时接收数据,DRI为低电平时停止接收,并最终返回流程的起始状态。
Preamble ADDR PAYLOAD CRC
ADDR PAYLOAD CRC
PAYLOAD
Output Register Empty
图8 数据包在无线接收模式下的变化
3.3 NRF2401调试中存在的问题
1、程序端口配置有误导致通信不能建立:
在发送端与接收端的程序中,都会对控制芯片端口的输入输出操作,虽然有些控制口基本一致,但是个别关键口有着差异,此时就需要注意。
2、线路连接错误导致通信不能建立:
较为明显的是飞线连接有误,还需要注意接入NRF2401引脚的限流电阻是否为正常值,因为这是一个很难发现的错误,他不但会影响数据的正常收发,并且
一旦选择不当会烧坏芯片。
3、NRF2401的供电与接地注意事项:
在使用NRF2401时,一定要注意地线的连接,即NRF2401应与各自所属的控制芯片实现共地。又由于NRF2401的工作电压最大不能超过3.6V,最佳为3.3V,所以在上电时,一定要对NRF2401先上电,再对起控制作用的单片机上电。
4脉冲宽度调制(PWM波)
脉冲宽度调制(PWM),简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域。
在遥控器的接收端,NRF2401通过接收到的数据,产生四路PWM,然后驱动四个LED的亮暗。
5系统实物图
实物图如图9和图10所示
图9 遥控器发送模块
图10 遥控器接收模块
6总结
该设计方案比较简单,容易操作,利用元器件也比较少,最后完成了所有模块的研究、设计、实行、纠错。最终,完成了基于航模的简易遥控器设计。
通过本次课设,我懂得了当遇到一个问题时,要抓住问题的关键不急不躁,这样才能找到问题本源,找到问题的所在。本次的程序是通过查阅相关的资料自己编写而得,在制作过程中了解和学习到了单片机的各种协议:如SPI和串口通信。在查阅了很多资料之后,通过自己的学习搭建了仿真电路,仿真电路的实现以后,便开始了实物的焊接。在焊接过程中还是出现了一定的问题,由于线路密集,出现了顺序焊接错误的事故,自己却没有发现,以至于实物调试了很久才排除了故障,让我明白了做事要仔细认真。
另外,有时候电路图忘保存了,就会使自己长时间的努力白费,我们就要心细,有耐心,才能很好地做好一件事情。
参考文献
[1] 王思明.单片机原理及应用系统设计[M].北京:科学出版社,2012.5
[2] 张毅刚. 单片机原理及接口技术[M].哈尔滨:哈尔滨工业大学出版社,1999
[3] 于殿泓.单片机原理与程序设计实验教程[M].西安:西安电子科技大学出版社,2007.5
附录
源程序
(1)发送端主程序:
#include "include.h"
u8 mode = 0;
u8 tmp_buf[33] = {0};
u16 Roll_Average = 0,Pitch_Average = 0,Yaw_Average = 0,Throttle_Average = 0; float temp10 = 0,temp11 = 0,temp12 = 0,temp13 = 0;
int main(void)
{
All_Init();//初始化函数
while(1)
{
Duty_Loop();//任务调度函数
printf("Roll_Average = %d\r\n",Roll_Average);
printf("Pitch_Average = %d\r\n",Pitch_Average);
printf("Yaw_Average = %d\r\n",Yaw_Average);
printf("Throttle_Average = %d\r\n",Throttle_Average);
}
}
(2)发送端任务调度程序:
#include "include.h"
#include "scheduler.h"
void Duty_100ms(void)
{
Roll_Average = Get_Adc_Average(ADC_Channel_10,8);//PC00
temp10 = (float)Roll_Average*(3.3/4096);
Roll_Average = 3299 - 1000*temp10;
Pitch_Average = Get_Adc_Average(ADC_Channel_11,8);//PC01
temp11 = Pitch_Average*(3.3/4096);
Pitch_Average = 1000*temp11;
Yaw_Average = Get_Adc_Average(ADC_Channel_12,8);//PC02
temp12 = Yaw_Average*(3.3/4096);
Yaw_Average = 3299 - 1000*temp12;
Throttle_Average = Get_Adc_Average(ADC_Channel_13,8);//PC03
temp13 = Throttle_Average*(3.3/4096);
Throttle_Average = 1000*temp13;
tmp_buf[0] = Roll_Average>>8;
tmp_buf[1] = Roll_Average&0xff;
tmp_buf[2] = Pitch_Average>>8;
tmp_buf[3] = Pitch_Average&0xff;
tmp_buf[4] = Yaw_Average>>8;
tmp_buf[5] = Yaw_Average&0xff;
tmp_buf[6] = Throttle_Average>>8;
tmp_buf[7] = Throttle_Average&0xff;
}
void Duty_Loop(void)
{
if(cnt_10ms >= 10)
{
Duty_100ms();//周期50ms的任务
LED2 = !LED2;
cnt_10ms = 0;
}
if(mode == 0)//RX模式
{
if(NRF24L01_RxPacket(tmp_buf) == 0)//一旦接收到信息,则显示出来.
{
tmp_buf[32]=0;//加入字符串结束符
}
else
delay_us(100);
}else//TX模式
{
if(NRF24L01_TxPacket(tmp_buf)==TX_OK)
{
tmp_buf[32]=0;//加入结束符
}
LED1 = !LED1;
LED3 = !LED3;
}
}
(3)接收端主程序:
#include "include.h"
u8 mode = 0;
u8 tmp_buf[33] = {0};
u16 Roll = 0,Pitch = 0,Yaw = 0,Throttle = 0;
int main(void)
{
All_Init();//初始化函数
while(1)
{
Duty_Loop();//任务调度函数
printf("Roll = %d\r\n",Roll);
printf("Pitch = %d\r\n",Pitch);
printf("Yaw = %d\r\n",Yaw);
printf("Throttle = %d\r\n",Throttle);
LED0 = !LED0;
}
}
(4)、接收端任务调度程序:
#include "include.h"
#include "scheduler.h"
void Duty_Loop(void)
{
if(mode == 0)//RX模式
{
if(NRF24L01_RxPacket(tmp_buf)==0)//一旦接收到信息,则显示出来.
{
tmp_buf[32]=0;//加入字符串结束符
}
else
delay_us(100);
}else//TX模式
{
if(NRF24L01_TxPacket(tmp_buf)==TX_OK)
{
tmp_buf[32]=0;//加入结束符
}
}
Roll = ((Roll = tmp_buf[0])<<8) + tmp_buf[1];
Pitch = ((Pitch =tmp_buf[2])<<8) + tmp_buf[3];
Yaw = ((Yaw =tmp_buf[4])<<8) + tmp_buf[5];
Throttle = ((Throttle =tmp_buf[6])<<8) + tmp_buf[7];
Set_Remote(7*Roll,7*Pitch,7*Yaw,24000-7*Throttle);
}
eainthea cci denti nvestigation,manageme ntandr eporti ng,ea chpost shoul dbe devel ope dunderthissystemspecialistsche ck,cl eartheexaminati ons,time,cy clesa ndot herreleva ntregulations.Stre ngthe ning sitesupervisi ona ndexami nation,t odete ctandinvestigateill egalcomma nd,i llegaloperationsandviol ationsofoperati ngrules.Secondsafetyreferstothe producti onsite,technologymanag ement,e qui pment,facilit ie s,andsoonca nleadt oaccidentsrisk sexist.1,a ccordi ngtotheexte ntofthese curityri sks,solvingi sdivi dedi ntoa,b,andcl evelsofdifficulty;A-l evel:difficult,mini ngdifficultie s,shallbereportedtothecompany'sproblems.B -cla ss:difficulttoresolvedif iculties,shall consistofmini ngorganizationstosolve probl ems.C -cla ss:fromsegmentsa ndbusine ssriskst hatmustbeaddresse dint heDe partment.2,open -pitmine unsafetypesi ncl ude :ele ctrical,transport,blasti ng,fire,a ndothersl ope.3,a ccordingt othesev erityoftheha zardfille dinbyunittroubl eshooti ng,registra tionform(seeatt 继电保护原理课程设计报告 评语: 考 勤 (10) 守 纪 (10) 设计过程 (40) 设计报告 (30) 小组答辩 (10) 总成绩 (100) 专 业: 电气工程及其自动化 班 级: 电气1004 姓 名: 阮学刚 学 号: 指导教师: 任丽苗 兰州交通大学自动化与电气工程学院 2013 年7月 18日
哈尔滨远东理工学院 课题名称 专业班级 学号 学生姓名 指导教师 2015年10月14日
1、例举设计过程中遇到的问题及其解决方法(至少两例)。答:(1)问题说明: 解决方法: (2)问题说明: 解决方法: 2、教师现场提的问题记录在此(不少于2个问题)。
目录 1 设计任务 (1) 2设计方案 (2) 2.1任务分析 (2) 2.2方案设计 (2) 3 系统硬件设计 (3) 3.1时钟电路设计 (3) 3.2复位电路设计 (3) 3.3 灯控制电路设计 (3) 3.4 倒计时显示电路设计 (4) 3.5 按键控制电路设计 (5) 4 系统软件设计 (6) 4.1 1S定时 (6) 4.2 定时程序流程 (6) 4.3交通灯的设计流程图 (6) 4.4定时器0 及中断响应 (7) 5仿真与性能分析 (8) 6心得体会 (9) 参考文献 (10) 附录1 系统原理图 .......................................................................错误!未定义书签。附录2 系统PCB图 .....................................................................错误!未定义书签。附录3 程序清单 .. (11) II
1 设计任务 支干道汇合成十字路口,在每个入口处设置红、绿、黄三色信号灯,红灯亮禁止通行,绿灯亮允许通行,黄灯亮则给行驶中的车辆有时间停在禁行线外。用红、绿、黄发光二极管作信号灯。如图1.1所示。设东西向为主干道,南北为支干道。 1. 基本要求 (1) 主干道处于常允许通行的状态,支干道有车来时才允许通行。主干道亮绿灯时,支干道亮红灯;支干道亮绿灯时,主干道亮红灯。 (2) 主、支干道均有车时,两者交替允许通行,主干道每次放行30秒,支干道每次放行20秒,设立30秒、20秒计时、显示电路。 (3) 在每次由绿灯亮到红灯亮的转换过程中,要亮5秒黄灯作为过渡。黄灯亮时,原红灯按1Hz 的频率闪烁。 (4) 要求主支干道通行时间及黄灯亮的时间均可在0~99秒内任意设置。 2. 选做 (1) 可设置紧急按钮,在出现紧急情况时可由交警手动实现全路口车辆禁行而行人通行状态,即主干道和支干道均为红灯亮。 (2) 实现绿波带。所谓‘绿波带’,是指在一定路段,只要按照规定时速,就能一路绿灯畅行无阻。“绿波带”将根据道路车辆行驶的速度和路口间的距离,自动设置信号灯的点亮时间差,以保证车辆从遇到第一个绿灯开始,只要按照规定速度行驶,之后遇到的信号灯将全是绿灯。
80C51单片机交通灯课程设计报告 目录 第一章引言 (3) 第二章单片机概述 (4) 第三章芯片介绍 (6) 3.1AT89S51单片机介绍 (6) 3.1.1简介 (6) 3.1.2主要管脚介绍 (6) 3.274LS164介绍 (8) 3.3共阳数码管介绍 (8) 3.3.1分类简介 (8) 图3.3LED数码管引脚定义 (9) 3.3.2驱动方式 (9) 3.3.3主要参数 (10) 3.3.4应用范围 (10) 第四章系统硬件设计 (11) 4.1硬件设计要求 (11) 4.2硬件设计所用元器件 (11) 4.3硬件设计图 (11) 4.4设计流程图 (12) 第五章系统软件设计 (13) 5.1流程图 (13)
5.2程序设计 (14) 第六章结论 (16) 参考文献 (18)
第一章引言 在今天,红绿灯安装在各个道口上,已经成为疏导交通车辆最常见和最有效的手段。但这一技术在19世纪就已出现了。 1858年,在英国伦敦主要街头安装了以燃煤气为光源的红,蓝两色的机械扳手式信号灯,用以指挥马车通行。这是世界上最早的交通信号灯。1868年,英国机械工程师纳伊特在伦敦威斯敏斯特区的议会大厦前的广场上,安装了世界上最早的煤气红绿灯。它由红绿两以旋转式方形玻璃提灯组成,红色表示“停止”,绿色表示“注意”。1869年1月2日,煤气灯爆炸,使警察受伤,遂被取消。 1914年,电气启动的红绿灯出现在美国。这种红绿灯由红绿黄三色圆形的投光器组成,安装在纽约市5号大街的一座高塔上。红灯亮表示“停止”,绿灯亮表示“通行”。 智能的交通信号灯指挥着人和各种车辆的安全运行,实现红、黄、绿灯的自动指挥是城乡交通管理现代化的重要课题.在城乡街道的十字交叉路口,为了保证交通秩序和行人安全,一般在每条道路上各有一组红、黄、绿交通信号灯,其中红灯亮,表示该条道路禁止通行;黄灯亮,表示该条道路上未过停车线的车辆停止通行,已过停车线的车辆继续通行;绿灯亮,表示该条道路允许通行.交通灯控制电路自动控制十字路口两组红、黄、绿交通灯的状态转换,指挥各种车辆和行人安全通行,实现十字路口城乡交通管理自动化。 本文为了实现交通道路的管理,力求交通管理先进性、科学化.分析应用了单片机实现智能交通灯管制的控制系统,以及该系统软、硬件设计方法,实验证明该系统实现简单、经济,能够有效地疏导交通,提高交通路口的通行能力。
兰州交通大学毕业设计(论文)规范要求 1、毕业论文组成论文由封面、毕业设计(论文)成绩评议表、毕业设计(论文)任务书、开题报告、中期检查、结题验收、中文摘要、英文摘要、目录、正文、参考文献、附录十二部分组成。各种部分的格式详见附录;(1)封面:封面包括论文题目、学生姓名、班级等,格式详见附1;(2)成绩评议表:包括论文评语、论文成绩,由答辩委员会填写,格式详见附2;(3)任务书:由指导教师填写,在布置毕业设计时发给学生,格式详见附3; (4)开题报告:学生认真书写后交指导教师检查,经指导教师签字有效,格式详见附4;(5)中期报告:由学生认真书写,指导教师签字后有效,格式详见附5;(6)结题验收:由学生认真书写,指导教师签字后有效,格式详见附6;(7)目录:按三级标题编写,要求层次清晰,主要包括摘要、正文主要层次标题、参考文献、附录等;(8)摘要:中文摘要应在400 字左右,包括论文题目、论文摘要、关键词(3至5个),英文要与中文摘要内容要对应; (9)正文:论文正文包括绪论(或前言、概述等)、论文主体、结论。工科论文要求符合 科技论文格式,正文文字应在15000字以上;(10)参考文献:必须是学生本人真正阅读过的,以近期发表的杂志类文献为主,图书类文献不能过多,且要与论文内容直接相关;(11)附录:含外文复印件及外文译文、有关图纸、计算机源程序,如果有毕业实习,需提 供毕业实习报告等。2、毕业论文的格式要求(1)毕业论文要统一用a4(210mm×197mm)标准纸打印装订(左装订)成册,正文用宋或楷体小四号字,版面上空 2.5 cm,下空 2 cm,左右空2 cm(靠装订纸一侧增加0.5 cm空白用于装订)。题目用三号(分两行书写时用 小三号)黑体字;题序和标题用四号黑体字。(2)论文中所涉及到的全部附图,不论计算 机绘制还是手工绘制,都应规范化,符号符合国颁标准。(3)学生完成毕业设计(论文)后,打印一份在xx年9月15日以前交指导教师评阅,进行结题验收。毕业设计 (论文)题目:学院:继续教育学院专业:自动化姓名:学号: 指导教师:xx年 9月 1 5日 5 毕业设计成绩评议表 学生姓名 班级指导教师姓名职称审阅人评语审阅人:年月日答辩委员会综合评语主席: 年月日论文成绩毕业设计(论文)任务书班级: 学生姓名:指导老师: 设计(论文)题目 主要研究内容关键环节计划进度参考资料开题报告班级: 学生姓名:指导老师: 设计(论文)题目
兰州交通大学尚德、励志、博学、笃行 机械设计专业课程设计 说明书 设计题目:二级展开式斜齿轮减速器 学生姓名:(本人签名) 学生学号:20050601 学院机构:机电工程学院 专业班级:
目录 设计任务书…………………………………………………………… 1传动装置总图…………………………………………………………………… 2设计要求………………………………………………………………………… 3已知条件………………………………………………………………………… 一、电动机的选择……………………………………………………………… 二、分配传动比………………………………………………………………… 三、传动装置的运动和动力参数计算………………………………………… 四、传动零件的设计计算……………………………………………………… 五、轴的结构设计及强度计算…………………………………………………… (一)输入轴结构设计和强度计算……………………………………… (二)中间轴的结构设计………………………………………………… (三)输出轴的结构设计………………………………………………… 六、轴承寿命校核计算…………………………………………………………… 七、平键的强度校核…………………………………………………………… 八、箱体的基本参数………………………………………………………………设计小结……………………………………………………………………………参考资料…………………………………………………………………………… 设计任务书 1.传动装置总图
2.设计要求: 1)选择电动机类型和规格; 2)设计减速器和开式齿轮传动; 3)选择联轴类型和型号; 4)绘制减速器装配图和零件图; 5)编写设计说明书。 3.已知条件 1)输送机主轴功率P=4 Kw,输送机主轴转速n=110 r/min;2)输送机效率ηf=0.96,齿轮搅油效率ηf=0.98; 3)工作情况单向转速,连续工作,工作平稳;
题目: 智能小车设计 打开命令行终端的快捷方式: ctr+al+t:默认的路径在家目录 ctr+shift+n:默认的路径为上一次终端所处在的路径. linux@ubuntu:~$ linux:当前登录用户名. ubuntu:主机名 :和$之间:当前用户所处在的工作路径. windows下的工作路径如C:\Intel\Logs linux下的工作路径是:/.../..../ ~:代表的是/home/linux这个路径.(家目录). ls(list):列出当前路径下的文件名和目录名. ls -a(all):列出当前路径下的所有文件和目录名,包括了隐藏文件. .:当前路径 ..:上一级路径 ls -l:以横排的方式列出文件的详细信息 total 269464(当前这个路径总计所占空间的大小,单位是K) drwxr-xr-x 3 linux linux 4096 Dec 4 19:16 Desktop 第一个位置:代表的是文件的类型. linux系统下的文件类型有以下几种. b:块设备文件 c:字符设备文件 d:directory,目录 -:普通文件. l:连接文件. s:套接字文件. p:管道文件. rwxr-xr-x:权限 r:读权限-:没有相对应的权限 w:写权限
x:可执行权限 修改权限: chmod u-或者+r/w/x 文件名 chmod g-或者+r/w/x 文件名 chmod o-或者+r/w/x 文件名 第一组:用户权限 第二组:用户组的权限 第三组:其他用户的权限. chmod 三个数(权限) 文件名 首先根据你想要的权限生成二进制数,再根据二进制数转换成十进制的三位数 rwxr-x-wx 111101011 7 5 3 chmod 753 文件名 rwx--xr-x 第二个位置上的数字:对应目录下的子文件个数,如果是非目录,则数字是1 第三个位置:用户名(文件创造者). 第四个位置:用户组的名字(前边的用户所处在的用户组的名字). 第五个位置:对应文件所占的空间大小(单位为b) 第六~八个位置:Dec 4 19:16时间戳(最后一次修改文件的时间) 最后一个位置:文件名 操作文件: 1.创建一个普通文件:touch 文件名 2.删除一个文件:rm(remove) 文件名 3.新建一个目录:mkdir(make directory) 目录名 递归创建目录:mkdir -p 目录1/目录2/目录3 4.删除一个目录:rmdir 目录名.//仅删除一个空目录 rm -rf 目录名//删除一个非空目录 5.切换目录(change directory):cd 路径 linux下的路径分两种 相对路径:以.(当前路径)为起点. 绝对路径:以/(根目录)为起点, 用相对路径的方式进入Music:cd ./Music 用绝对路径的方式进入Desktop:cd /home/linux/Desktop 返回上一级:cd ..
单片机课程设计 课题:基于51单片机的交通灯设计 专业:机械设计制造及其自动化 学号: 指导教师:邵添 设计日期:2017/12/18 成绩: 大学城市科技学院电气学院 基于51单片机数字温度计设计报告
一、设计目的作用 本设计是一款简单实用的小型数字温度计,所采用的主要元件有传感器DS18B20,单片机AT89C52,,四位共阴极数码管一个,电容电阻若干。DS18B20支持“一线总线”接口,测量温度围-55°C~+125°C。在-10~+85°C围,精度为±0.5°C。18B20的精度较差,为±2°C 。现场温度直接以“一线总线”的数字方式传输,大大提高了系统的抗干扰性。适合于恶劣环境的现场温度测量,如:环境控制、设备或过程控制、测温类消费电子产品等。 本次数字温度计的设计共分为五部分,主控制器,LED显示部分,传感器部分,复位部分,按键设置部分,时钟电路。主控制器即单片机部分,用于存储程序和控制电路;LED显示部分是指四位共阴极数码管,用来显示温度;传感器部分,即温度传感器,用来采集温度,进行温度转换;复位部分,即复位电路,按键部分用来设置上下限报警温度。测量的总过程是,传感器采集到外部环境的温度,并进行转换后传到单片机,经过单片机处理判断后将温度传递到数码管显示。 二、设计要求 (1).利用DS18B20传感器实时检测温度并显示。 (2).利用数码管实时显示温度。 (3).当温度超过或者低于设定值时蜂鸣器报警,LED闪烁指示。 (4).能够手动设置上限和下限报警温度。 三、设计的具体实现 1、系统概述 方案一:由于本设计是测温电路,可以使用热敏电阻之类的器件利用其感温效应,在将随被测温度变化的电压或电流采集过来,进行A/D转换后,就可以用单片机进行数据的处理,在显示电路上,就可以将被测温度显示出来,这种设计需要用到A/D转换电路,感温电路比较麻烦。 方案设计框图如下:
兰州交通大学毕业设计格式规范要求 1、组成 由封面、()成绩评议表、设计()任务书、、中期检查、结题验收、中文摘要、英文摘要、目录、正文、、附录十二部分组成。各种部分的格式详见附录; (1)封面:封面包括题目、学生姓名、班级等,格式详见附1; (2)成绩评议表:包括评语、成绩,由委员会填写,格式详见附2; (3)任务书:由指导教师填写,在布置毕业设计时发给学生,格式详见附3; (4)开题报告:学生认真书写后交指导教师检查,经指导教师签字有效,格式详见附4; (5)中期报告:由学生认真书写,指导教师签字后有效,格式
详见附5; (6)结题验收:由学生认真书写,指导教师签字后有效,格式详见附6; (7)目录:按三级标题编写,要求层次清晰,主要包括摘要、正文主要层次标题、参考文献、附录等; (8)摘要:中文摘要应在400字左右,包括题目、摘要、关键词(3至5个),英文要与中文摘要内容要对应; (9)正文:正文包括绪论(或前言、概述等)、主体、结论。工科要求符合科技格式,正文文字应在15000字以上; (10)参考文献:必须是学生本人真正阅读过的,以近期发表的杂志类文献为主,图书类文献不能过多,且要与内容直接相关; (11)附录:含外文复印件及外文译文、有关图纸、计算机源程序,如果有毕业,需提供毕业等。
2、的格式要求 (1)毕业要统一用A4(210mm 197mm)标准纸打印装订(左装订)成册,正文用宋或楷体小四号字,版面上空2.5cm,下空2cm,左右空2cm(靠装订纸一侧增加0.5cm空白用于装订)。题目用三号(分两行书写时用小三号)黑体字;题序和标题用四号黑体字。 (2)中所涉及到的全部附图,不论计算机绘制还是手工绘制,都应规范化,符号符合国颁标准。 (3)学生完成毕业设计()后,打印一份在2012年9月15日以前交指导教师评阅,进行结题验收。
1 螺纹联接 1列出四种常用标准螺纹联接件。连接螺纹能满足自锁条件,为什么在设计螺纹联接时必须考虑放松问题?螺纹联接防松的根本问题是?常用的防松方法分哪几种?每类中有哪些具体结构?预紧螺栓承受轴向载荷作用时,螺栓上的总载荷为什么不等于轴向载荷和预紧力之和?常用螺纹联接的类型有哪些? 2采用腰杆螺栓和空心螺栓的目的是什么,它和哪几种结构作用相同?分布在同一圆周上的螺栓数目为什么尽量取偶数?螺栓组设计中为什么会出现偏心载荷,防止偏载的措施有哪些?受横向载荷的螺栓组联接采用什么方式减小螺栓的预紧力及其机构?
3提高螺栓强度的方法有哪些?普通螺栓联接和铰制孔用螺栓联接的结构有什么区别?画出受横向载荷时普通螺栓和铰制孔用螺栓的结构。分析其工况、主要失效形式及其强度计算准则,写出强度计算公式
5为什么采用圈数较多的加厚螺母不能提高联接的强度? 6分析活塞式空气压缩机气缸盖联接螺栓工作时的受力变化情况,它的最大应力、最小应力如何得出?当气缸内的最高压力提高时,它的最大应力、最小应力将如何变化? 2 键联接 1键的作用?键联接分类有哪些?无键联接的类型有哪些?
2花键的类型有哪些?花键联接的特点和失效形式分别是什么? 3为什么采用两个平键时,一般布置在沿周向相隔180°的位置;采用两个楔键时相隔90°-120°;采用两个半圆键时,却布置在轴上的同一条母线上;采用切向键时布置在周向相距120°-130°。 4平键有哪些?普通平键失效形式有哪些?强度校核判断强度不足时应该采取何种措施? 5矩形花键联接的定心方式有哪些?渐开线花键的定心方式有哪些?适用于什么场合?
单片机原理及系统课程设计 专业:电气工程及其自动化 班级 姓名: 学号: 指导教师: 兰州交通大学自动化与电气工程学院 2013 年 3 月 7 日
基于单片机的流水灯设计 摘要 单片机是一种集成在电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能集成到一块硅片上构成的一个小而完善的计算机系统。 本设计是以AT89C51单片机为彩灯控制方案,充分利用了8051芯片的I/O引脚。系统以采用MCS-51系列单片机Intel8051为中心器件来设计LED流水灯系统,实现8组LED霓虹灯的左、右循环显示,并实现循环的速度可调。本方案以嵌入式方式为基础,软硬件相结合,运用proteus,visio和仿真软件keil完成设计。本设计优点是实际应用效果好,亮灯花样好,与其他彩灯相比体积小、件硬少、价格低、低能耗、电路结构简单及容易操作和阅读。在现代社会中,彩灯具有广泛的发展天地。 关键字:AT89C51;单片机;LED流水灯 Abstract MCU is a kind of integrated circuit chip, It is the use of large scale integrated ciruit technology has the ability to handle data central processor CPU RAM random access memory, read-only memory ROM, a variety of I/O port and interrupt system, timer / timer functions are integrated into one small but perfect computer system consisting of a silicon chip. The design is based on AT89C51 MCU as the lights control scheme, make full use of the 8051 chip I/O pin. System uses MCS-51 series single-chip microcomputer Intel8051 as the center to design LED water lamp system, the realization of the 8 group LED neon light left, right circular display, and realize the circulation speed adjustable. The scheme is based on the embedded mode, the combination of software and hardware, the use of Proteus, Visio and simulation software keil to complete the design. This design has the advantages of good actual application effect, good lighting pattern, compared with other lights of small size, low price, small pieces of hard, low energy consumption, simple circuit structure and easy to operate and reading. In modern society, with the development of world wide lantern. Keywords: AT89C51,MCU,LED water lamp
课程设计报告 课程名称单片机原理及应用 设计题目电子琴的设计 专业班级自动化1142 姓名周太永 学号1104421242 指导教师蔡长青张卓 起止时间2014.6.23-2014.7.11 成绩评定 考核内容设计 表现 设计 报告 答辩 综合 评定 成绩 电气与信息学院
2013/2014学年第二学期 《单片机控制系统设计与调试》课程设计任务书 指导教师:蔡长青班级:自动化1141、2班 地点:机房、单片机实验室(实训中心415) 课程设计题目:基于单片机原理的电子琴设计 一、课程设计目的 1.灵活运用单片机的基础知识,依据课程设计内容,能够完成从硬件电路图设计, 到PCB制版,再到软件编程及系统调试实现系统功能,完成课程设计,加深对单片机基础知识的理解,并灵活运用,将各门知识综合应用。 2.能够上网查询器件资料,培养对新知识新技术的独立的学习能力和应用能力。 3.独立完成一个小的系统设计,从硬件设计到软件设计,增强分析问题、解决问 题的能力,为日后的毕业设计及科研工作奠定良好的基础。 二、课程设计内容(包括技术指标) 1.焊接。认真、仔细,避免缺焊、漏焊。 2.频率计算。会计算脉冲值与频率的关系。 3.工作过程。开机时,第一步是对定时器T0进行初始化,设定它的工作状态(对 于本系统将T0设定为工作方式0);然后判断是否有键按下,如果没有按键按下,继续判断,如果有按键按下,则判断是哪个键按下;再根据按键的功能将计数初值装入定时器T0中中并启动T0,当T0定时完毕后,重新装入计数初值继续定时并将P3.3取反,再次定时完毕后再一次的装入计数初值 继续定时并将P3.3取反,一直循环此操作直到按键释放为止,按键释放后 停止T0工作并再次判断是否又有按键按下,并继续执行以前的过程。 三、时间安排 1.布置任务、查资料1天 2.硬件电路图设计及PCB制版3天 3.硬件电路图及PCB制版验收、电路板焊接1天 4.软件编程设计3天 5.系统调试3天 6.调试验收1天 7.完成设计报告3天 四、基本要求 1.画出硬件电路图,完成PCB制版; 2.画出软件流程图,编写程序(C51语言/汇编语言); 3.完成系统调试; 4.提交设计报告。
兰州交通大学 课程设计 中文题目:基于CWDM的城域网设计方案 英文题目:Metropolitan Area Network Design Scheme Based on CWDM 课程: 学院: 专业: 姓名: 学号: 指导教师: 二零一四年七月
摘要 粗波分复用系统(CWDM)能有效节省光纤资源和组网成本,它解决了光纤短缺和多业务透明传输两个问题,主要应用在城域网汇聚和接入层,且可在短时间内建设网络及开展业务。CWDM具有低成本、低功耗、小体积等诸多优点,目前在城域网传输中已经有大量应用。运用于G.652、G.653、G.655光纤的EXP系列CWDM设备,给各大运营商和系统集成商提供了一套低价格、高性能的传输解决方案,是日益增长的城域网组网的理想选择。 CWDM系统组网方式灵活多样,可以组成点对点、星形、链形、环形等各种拓扑结构,对于竞争区域的运营商有着比较大的吸引力。目前CWDM在行业市场上已经得到了愈来愈多的应用。 关键词:CWDM系统;城域网;组网
Abstract Coarse Wavelength Division Multiplexing system (CWDM)can save the cost of fiber resources and networking, it addresses the shortage of fiber and multi-service transparent transmission of two issues, mainly used in metro aggregation and access layer, and in short time network and conduct business within the building. CWDM low cost, low power consumption, small size and many other advantages, the current transmission in the metropolitan area has a large number of applications.Shenzhen, Hong Yang Shun Technology Co, Ltd. Branch of market requirements, develop applied G.652, G.653, G.655 fiber EXP series CWDM equipment, to the major operators and system integrators to provide a low price , high-performance transmission solutions, is growing ideal for metropolitan area networks. CWDM system, flexible networking mode, you can form point to point, star, chain, ring topology, etc, for the regional competition with larger operators in the appeal. CWDM in the industry currently on the market has been more and more applications. Keywords: CWDM system;Metropolitan Area Networks; Networking
单片机系统课程设计报告 专业:自动化 学生姓名: 学号: 指导教师: 完成日期:2011 年 3 月17 日
目录 1 设计任务和性能指标 (3) 1.1设计任务............................................................................ 错误!未定义书签。 2 设计方案 (4) 2.1任务分析 (4) 2.2方案设计 (4) 3 系统硬件设计 (5) 3.1时钟的电路设计 (5) 3.2复位电路设计 (5) 3.3灯控电路设计 (5) 3.4倒计时电路设计 (6) 3.5按键控制电路设计 (7) 4 系统软件设计 (8) 4.11秒定时 (8) 4.2定时程序流程 (8) 4.3交通灯的设计流程图 (9) 4.4定时器0与中断响应 (10) 5 仿真及性能分析 (10) 5.1仿真结果图 (11) 5.2仿真结果与分析 (12) 6 心得体会 (13) 参考文献 (14) 附录1 系统原理图 (15) 附录2 系统PCB图 .................................................................. 错误!未定义书签。附录3 程序清单 (17)
1.1设计任务 利用单片机完成交通信号灯控制器的设计,该交通信号灯控制器由一条主干道和一条支干道汇合成十字路口,在每个入口处设置红、绿、黄三色信号灯,红灯亮禁止通行,绿灯亮允许通行,黄灯亮则给行驶中的车辆有时间停在禁行线外。用红、绿、黄发光二极管作信号灯。如图5.1所示。设东西向为主干道,南北为支干道。 图5.1 交通灯示意图 1. 基本要求 (1) 主干道处于常允许通行的状态,支干道有车来时才允许通行。主干 道亮绿灯时,支干道亮红灯;支干道亮绿灯时,主干道亮红灯。 (2) 主、支干道均有车时,两者交替允许通行,主干道每次放行30秒, 支干道每次放行20秒,设立30秒、20秒计时、显示电路。 (3) 在每次由绿灯亮到红灯亮的转换过程中,要亮5秒黄灯作为过渡。 黄灯亮时,原红灯按1Hz 的频率闪烁。 (4) 要求主支干道通行时间及黄灯亮的时间均可在0~99秒内任意设置。 2. 选做 (1) 可设置紧急按钮,在出现紧急情况时可由交警手动实现全路口车辆 禁行而行人通行状态,即主干道和支干道均为红灯亮。 (2) 实现绿波带。所谓‘绿波带’,是指在一定路段,只要按照规定时速, 就能一路绿灯畅行无阻。“绿波带”将根据道路车辆行驶的速度和路口间的距离,自动设置信号灯的点亮时间差,以保证车辆从遇到第一个绿灯开始,只要按照规定速度行驶,之后遇到的信号灯将全是绿灯。 南 北 东 西
51单片机课程设计报告 学院: 专业班级: 姓名: 指导教师: 设计时间:
51单片机课程设计 一、设计任务与要求 1.任务:制作并调试51单片机学习板 2.要求: (1)了解并能识别学习板上的各种元器件,会读元器件标示; (2)会看电路原理图; (3)制作51单片机学习板; (4)学会使用Keil C软件下载调试程序; 用调试程序将51单片机学习板调试成功。 二、总原理图及元器件清单 1.总原理图 2.元件清单 三、模块电路分析 1. 最小系统: 单片机最小系统电路分为振荡电路和复位电路, 振荡电路选用12MHz 高精度晶振, 振荡电容选用22p和30p 独石电容;
图 1 图 2 复位电路使用RC 电路,使用普通的电解电容与金属膜电阻即可; 图 3 当单片机上电瞬间由于电容电压不能突变会使电容两边的电位相同,此时RST 为高电平,之后随着时间推移电源负极通过电阻对电容放电,放完电时RST 为低电平。正常工作为低电平,高电平复位。 2. 显示模块: 分析发光二极管显示电路: 图 4 发光二极管显示电路分析:它是半导体二极管的一种,可以把电能转化成光能,常简写为
LED。发光二极管与普通二极管一样是由一个PN结组成,也具有单向导电性。当给发光二极管加上正向电压后,产生自发辐射的荧光。图中一共有五个发光二极管其中一个为电源指示灯,当学习板通电时会发光以指示状态。其余四个为功能状态指示灯,实际作用与学习板有关 分析数码管显示电路 图 5 数码管显示电路分析:数码管按段数分为七段数码管和八段数码管,图中所用为八段数码管(比七段管多了一个小数点显示位),按发光二极管单元连接方式分为共阳极数码管和共阴极数码管。共阳数码管是指将所有发光二极管的阳极接到一起形成公共阳极(COM)的数码管.共阴数码管是指将所有发光二极管的阴极接到一起形成公共阴极(COM)的数码管。数码管主要用来显示经电路板处理后的程序的运行结果。图中使用了八个八段数码管,可以显示八个0-15的数字。使用数码管可以直观的得到程序运行所显示的结果.也可以显示预置在学习板上的程序,主要通过16个开关来控制。 四、硬件调试 1、是否短路 用万用表检查P2两端是短路。电阻为0,则短路,电阻为一适值,电路正常。 2、焊接顺序 焊接的顺序很重要,按功能划分的器件进行焊接,顺序是功能部件的焊接--调试--另一功能部件的焊接,这样容易找到问题的所在。 3、器件功能 1)检查原理图连接是否正确 2)检查原理图与PCB图是否一致 3)检查原理图与器件的DATASHEET上引脚是否一致 4)用万用表检查是否有虚焊,引脚短路现象 5)查询器件的DATASHEET,分析一下时序是否一致,同时分析一下命令字是否正确 6)通过示波器对芯片各个引脚进行检查,检查地址线是否有信号的 7)飞线。用别的的口线进行控制,看看能不能对其进行正常操作,多试验,才能找到问题出现在什么地方。 1、详细描述硬件安装过程中出现的故障现象,并作故障分析,及解决方法。 六、软件调试
毕业设计(论文) 装载机工作装置运动设计与仿真 学科、专业: 学号: 作者姓名: 指导教师:
兰州交通大学毕业设计(论文) 摘要 装载机是一个通常用于建筑的重型设备,主要用于将材料(等asasphalt,拆除杂物,灰尘,雪,饲料,砾石,原木,矿物原料,再生材料,岩石,沙,木屑)装入另一种类型的机械(如自卸车,输送带,进料斗,或车厢)。它对于减轻劳动强度,加快工程建设速度,提高工程质量起着重要的作用。随着我国制造业的发展,对于装载机的设计和制造的要求也越来越高,而传统的设计方法存在很多不足,如设计周期长,设计质量差,设计费用高,不能反映整个结构的应力分布,很难满足客户需求。 本文首先主要介绍了课题的研究背景,装载机的发展趋势及设计方法,分析了装载机的总体构造,对装载机工作装置作了简要介绍;然后利用三维设计软件SolidWorks 完成了对装载机工作装置的三维设计,建立整机结构模型并进行运动仿真,了解实际工作情况。最后利用SolidWorks自带插件SolidWorks Simulation对装载机主要承受载荷的部件进行静力分析,分析其变形与受力情况,以便能对其进行更好的优化设计。 关键字:装载机;三维设计;有限元分析 I
兰州交通大学毕业设计(论文) Abstract Loader is a heavy equipment normally used in construction, Mainly for the material (like removal of debris, dirt, snow, feed, gravel, wood, mineral materials, recycled materials, rock, sand, sawdust) into another type of machine (truck, conveyor, into hopper, or car). It is to reduce labor intensity, speed up the construction speed, improve project quality plays an important role. With the development of China's manufacturing industry, the requirements for the design and manufacture loaders are also increasing, while the traditional design method has many deficiencies, such as long design cycles, poor design quality, high design costs, does not reflect the whole structure stress distribution, it is difficult to meet customer needs. This paper first introduces the research background, trends and design issues loaders, analyzes the overall structure of the loader, loader working device for a brief introduction; Then use the three-dimensional design software SolidWorks completed the loader working device 3D design, build the whole structure and motion simulation model, to understand the actual work; Finally, the use of static analysis plug-ins SolidWorks Simulation SolidWorks comes to bear on the loader loads the main component analysis of the deformation and stress conditions in order to be better optimized. Key Words:Loader;Three-dimensional design;Finite Element Analysis
这里可以加学校LOGAL 单片机课程设计报告 院系:12级物信系 班别:光信息科学与技术7班 课程名称:秒表设计 姓名:龚俊才欧一景 学号:1210407033 1210407041 指导老师:张涛 2011.12.23
目录 1课程设计的目的和任务 1.1 单片机秒表课程设计的概述 1.2课程设计思路及描述 1.3 课程设计任务和要求 2硬件与软件的设计流程 2.1系统硬件方案设计 2.2软件方案设计 3 程序编写流程及课程设计效果3.1源程序及注释 3.2原理图分析 3.3课程设计效果 4 心得体会 5 相关查阅资料
1. 课程设计的目的和任务 1.1单片机秒表课程设计的概述 一、课程设计题目 秒表系统设计——用STC89C52RC设计一个4位LED数码显示“秒表”,显示时间为 00.00~99.99秒,每10毫秒自动加一,每1000毫秒自动加一秒。 二、增加功能 增加一个“复位”按键(即清零),一个“暂停”和“开始”按键。 三、课程设计的难点 单片机电子秒表需要解决三个主要问题,一是有关单片机定时器的使用;二是如何实现LED 的动态扫描显示;三是如何对键盘输入进行编程。 四、课程设计内容提要 本课程利用单片机的定时器/计数器定时和记数的原理,结合集成电路芯片8051、LED数码管以及课程箱上的按键来设计计时器。将软、硬件有机地结合起来,使得系统能够正确地进行计时,数码管能够正确地显示时间。其中本课程设计有两个开关按键:其中key1按键按下去时开始计时,即秒表开始键(同时也用作暂停键),key2按键按下去时数码管清零,复位为“00.00”. 五、课程设计的意义 1)通过本次课程设计加深对单片机课程的全面认识复习和掌握,对单片机课程的应用进一步 的了解。 2)掌握定时器、外部中断的设置和编程原理。 3)通过此次课程设计能够将单片机软硬件结合起来,对程序进行编辑,校验。 4)该课程通过单片机的定时器/计数器定时和计数原理,设计简单的计时器系统,拥有正确的 计时、暂停、清零,并同时可以用数码管显示,在现实生活中应用广泛,具有现实意义 六、课程设计仪器 a) 集成电路芯片8051,七段数码管,89C51单片机开发板 b) MCS-51系列单片机微机仿真课程系统中的软件(Keil uvision2)。