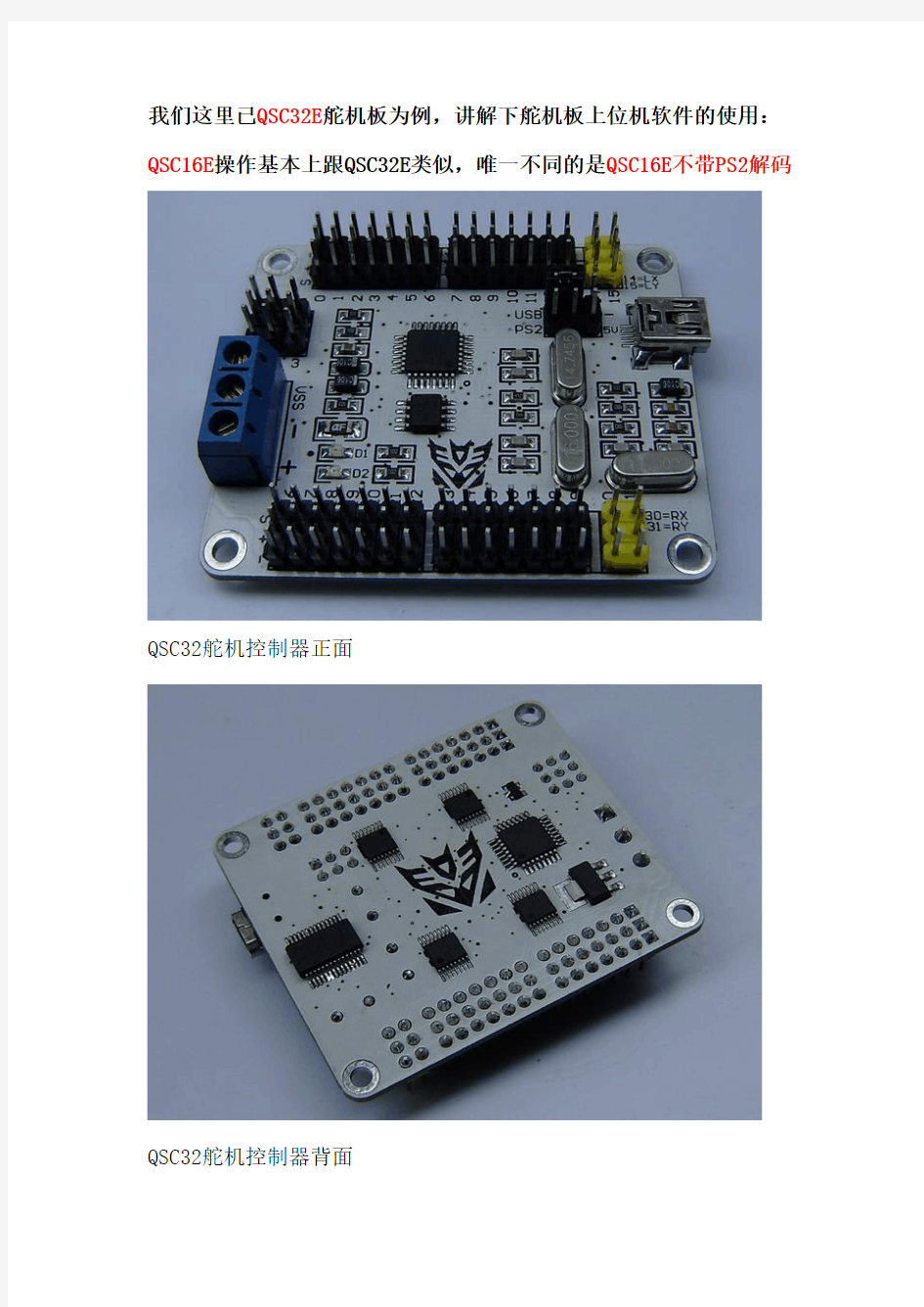
我们这里已QSC32E舵机板为例,讲解下舵机板上位机软件的使用:QSC16E操作基本上跟QSC32E类似,唯一不同的是QSC16E不带PS2解码
QSC32舵机控制器正面
QSC32舵机控制器背面
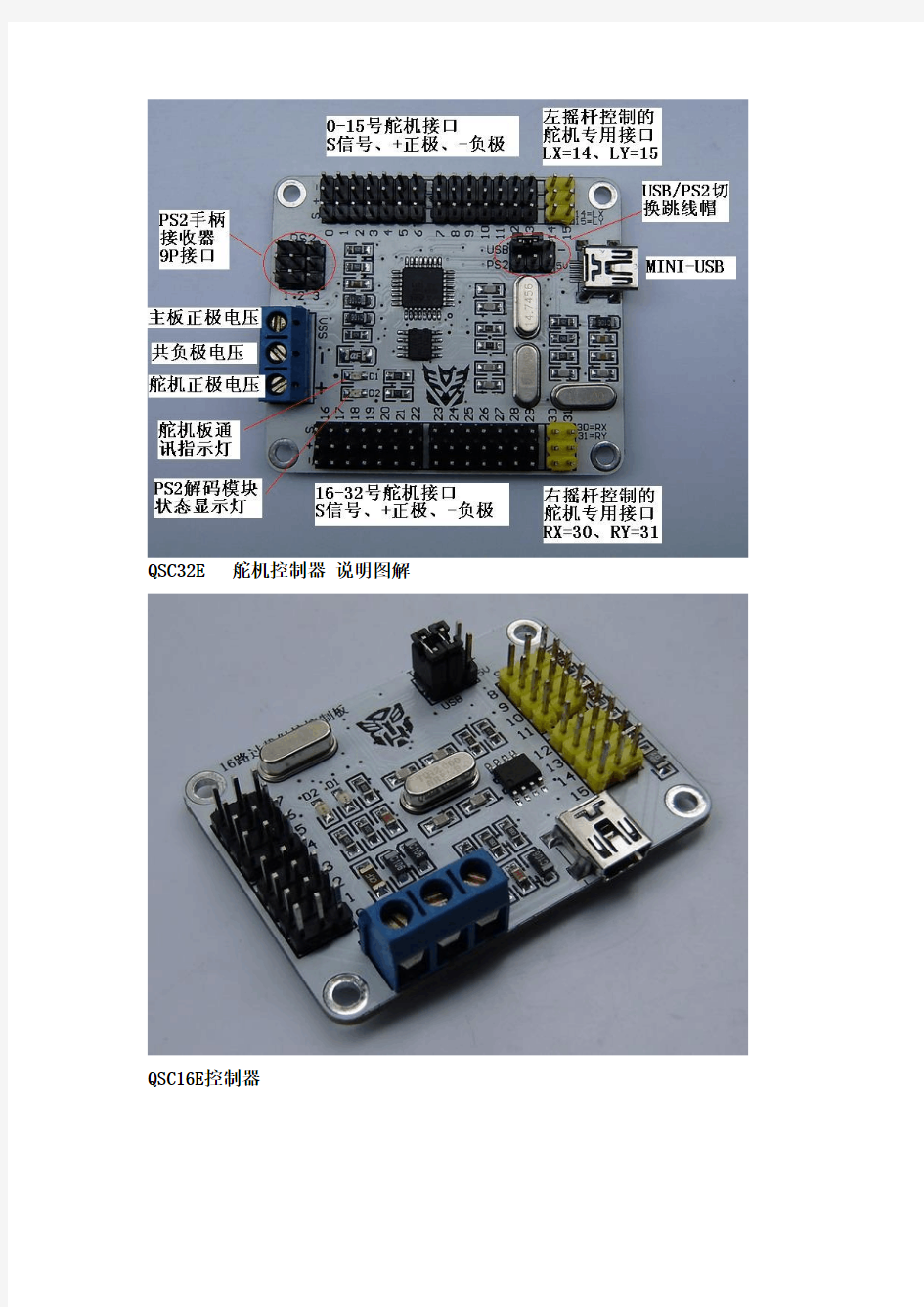
QSC32E 舵机控制器说明图解
QSC16E控制器
QSC16E 舵机控制器说明图解
1、安装驱动
使用MINI-USB线连接上舵机板找到以下的驱动,这里可跳过安装
然后打开QSC-32E(PL2303)驱动文件夹
双击PL2303 Driver 来手动安装驱动程序
如果是WIN7系统需要进行如下操作:
鼠标右键单击此文件选择属性弹出如下窗口:
然后选择兼容性窗口再这里的用兼容性模式运行这个程序打上勾
再下拉窗口中选择WINXP,我这里使用的本身已经是WINXP系统所以无此选项使用者选择WINXP即可
然后点击确定退出该窗口
然后重新双击驱动软件便可在WIN7模式下用兼容模式安装WINXP的驱动程序
2、安装https://www.doczj.com/doc/bf13417375.html, Framewoks2.0,如果已经安装了或者有高版本的NetFramewoks 文件可跳过安装,如果没有安装这个文件则打不开上位机软件,如果能直接打开上位机软件则可不安装此文件。WIN7或以上操作系统可直接跳过安装。
3.上位机软件介绍说明
左边为舵机图标操作窗口,打钩显示该舵机口、取消就关闭该舵机口右边为舵机图标位置保存窗口,舵机图标可自由拖拉,拖拉后保存位置
舵机图标窗口,可自由拖拉如下人形的图标窗口,然后保存位置
保存的位置一定要跟上位机软件QSC舵机控制器同一个目录下,以后才能从选择那里直接打开,保存到其他文件夹无效
COM口选择端
默认通讯速度为高速模式115200 特殊情况下使用低速模式9600
动作组调试运行窗口,上面是调试窗口下面是运行窗口
初始化:上位机软件初始化,表示从开始地址256号位置开始写动作,只是对软件操作,而不改变已经下载到主板上的动作
擦除:对下载到主板上的动作组做清空操作
运行动作组:运行已经下载到主板上的动作组停止:停止运行动作组
脱机动作组:运行已经下载到主板上的动作组并且下次开机直接执行该动作组
禁用:禁用脱机动作组功能
舵机口指示条也随意拖动
B表示舵机偏差(默认为0),即舵机的相对位置范围为-100----100
P表示舵机位置(默认为中位1500)范围为500-2500
而导入动作组中的是绝对位置P0=B+P
舵机位置速度状态数据显示,
#表示几号舵机 P表示舵机的位置 T表示舵机运行到该位置的时间
串口发送接收区输入代码点击发送按键即可
调试好的舵机偏差值B 跟动作文件P 的保存操作窗口
B跟P需要独立保存打开使用也需要独立操作不能用P的打开窗口打开B保存好的文件。
-
-
POS13X=202Y=83 POS14X=78Y=85 POS19X=350Y=159
POS20X=308Y=238 POS21X=187Y=289 POS22X=308Y=349
POS23X=184Y=402
保存的位置文件为一个XML格式的文件
如果直接打开而非通过上位机软件来打开这个文件会出现如上的数据
ID 位置动作文件序号
Move 舵机转动的位置文件Time舵机转动的时间文件
Position上位机软件商的舵机图标位置
其中最重要的文件是MOVE 跟Time文件
4.舵机板供电接口说明
注意:如果USB一直插着只需要提供舵机供电电压,因为主板供电由USB提供,但是依然接着VSS电压不影响使用。
首先确定自己使用的舵机的供电电压(一般舵机为5V-7.2V),主板供电电压VSS为7V-12V
这里以QSC32E舵机板为例、QSC24E-MINI、QSC16E接线图同此
基本的供电方案可分为三种,实物接线图如下:
第一种供电方案,此供电方案比较常用,主要用于给6V的航模舵机供电一块电池的解决方案。如果使用的是塑料9G舵机建议串联两个降压模块,一个降压模块的压降为1.2V
第二种供电方案,用于7.4V机器人舵机且舵机数量较少的情况下
第三种供电方案,用于7.4V电压的机器人舵机且舵机数量较多的情况下。也是最稳定最理想的一种方案
如果是模型舵机且舵机较多的情况下,给舵机供电的电池接一次降压模块即可
5、上位机软件的使用
双击打开上位机软件
在这里点击一次刷新然后选择最新出来的COM口、并单击连接
注意主板的 USB/PS2切换跳线帽放置USB位置
在舵机口上接上一个舵机,例如接在31号舵机口(接这个地方便于测试上位机软件也便于测试摇杆)
注意舵机板舵机排针接口的 S + - 于舵机线的对应
一般来说白红黑的线白色接S 黑色接-
如果是黄红棕的线黄色接S 棕色接-
只选择31号舵机号
然后左右拖拉31号舵机号,这个时候通讯指示灯D1会跟着同步闪动且舵机会跟着左右转
推到左边、然后添加动作
点击添加动作出现一个动作位置
再推到右边、然后添加动作
出现另一个动作位置
调试好文件后点击运行就能运行动作了
循环打上√就是循环这个动作组
如果边拖舵机号的指示条以及拖拉舵机位置添加动作后启动面板控制的时候舵机号的图标也会跟着同步运动
期间也可以单击右下角的保存
命名一个你需要的名字,保存动作,便于以后打开使用
(对于命名的方式数字代表动作组、中间代表动作、最右边代表按键)
然后单击
初始化是上位机软件动作组初始化,就是从0动作组,从256地址开始写。
再点击下载动作组选择0
舵机板上面的红灯会闪动并出现
这样这个动作就下载到了0号动作组
然后变成动作组1 开始地址也变成489(这里说明动作组0的地址为
为256-497,而动作组1从489后开始下载,如果覆盖掉前面地址将使得动作组失效,所以开始位置尽量不要修改)
重新选择0号动作组
这里可运行动作组来进行测试
《擦除》表示,把已经下载到舵机板上面的动作组删除掉。
然后就可以用手柄来提取动作组了。(此功能针对QSC32E、QSC24-MINI有效,QSC16E不带此功能)
手柄接收器跟舵机板的PS2接口如图所示
这是PS2接收器
PS2接口9P线接口说明
激光切割机软件使用说明 (图文笔记版) 一、总体功能概述 ⑴操作软件的三大版块: 图一、ByVision主菜单操作界面。图二、HANDLING-OPERATION操作界面 图三、LaserView操作界面
⑵控制按键的两个部分:
图二、屏幕右侧按键。 释放切割头
二、激光切割机每个版块的具体功能介绍 ⑴ByVision(用户名:CH 密码:1) ①“MAIN(F5)”主菜单:其中包括“管理员”、“视图”、“诊断”、“清屏”、 “信息”、“关闭”。 “管理员”、“视图”:已设置好,一般无需改动。一般级别无法修改的。“诊断”:用于显示机床的通讯状态,绿灯通讯为正常,红灯通讯中断或未建立通讯或没有该硬件(如Byloder)。前两个灯为绿,后一个灯为红,此时为正常。具体的机型不同而有异。 “清屏”:点击后屏幕为白色,此时触摸功能关闭,就可用布来擦拭屏幕。
登录/注销:用于不同级别的用户进入系统,权限不一样的。 详细内容:当提示框出现提示内容的时候,由于显示的内容有限,当出现”……”的提示时可以在详细内容中看见全部的报警和故障。可以用该菜单中的RESET 键进行复位等操作。 信息:关于该机器的全部软件的版本。 关闭:内有可选择的关闭对话框。一般用关闭Byvision项目。 语言选择:根据国旗代表不同的语言。一般英语的故障解释比较确切。 有故障时候尽量用英语将信息记录下来,便于准确判断。 ②“HAND(F6)”手动菜单:其中包括“设置参数机床”、“参数”、“手动功 能”、“特殊功能”“CNC”、“SERV”、“STOP PART”、“STOP WORK”。
https://www.doczj.com/doc/bf13417375.html, HTHL-100P高精度回路电阻测试仪 上位机软件分析 1、软件功能简介 此配套工具软件可导入通过仪器转存到U盘的测量数据,供试验人员对测量数据做进一步分析处理。 2、软件特点 ●本软件为绿色软件,无需安装便可使用 ●支持所有的Windows系列操作系统 3、运行环境 硬件设备要求: 建议使用赛扬533及以上CPU,512MB及以上内存、1GB及以上可用硬盘空间。 支持软件: Win98、Win2000、XP、Win2003、Vista、Win7、Win8等Windows 系列操作系统; Microsoft Office 2000及以上版本(必须包含Excel)。 4、随机光盘文件介绍 打开随机配置的光盘,将光盘内的文件夹拷贝到本地计算机中,打开文件目录如图23所示。
https://www.doczj.com/doc/bf13417375.html, HTHL-100P高精度回路电阻测试仪 图23 回路安装程序光盘目录 图标①:CONFIG.INI为配置文件; 图标②:回路(接触)电阻测试仪配套工具软件,双击文件即可运行程序; 图标③:产品说明书。 5、软件操作说明 1)双击,运行回路(接触)电阻测试仪配套工具软件,如图24所示。 图24 回路(接触)电阻测试仪配套工具软件界面2)导入数据:插上U盘,点击“导入数据”按钮,单击需导入的文件名,如图25所示,点击打开,进入导入成功界面,如图26所示。
https://www.doczj.com/doc/bf13417375.html, HTHL-100P高精度回路电阻测试仪 图25 导入数据 图26 导入成功 3)生成报表:在图26中,选中其中一条记录,点击“生成报表”按钮,即可生成该条记录的报表,如图27所示。
中控考勤机说明书 1考勤机的使用 1.1登记指纹 1.2考勤机功能介绍(通讯,参数设置,系统信息,U盘管理) 2考勤软件的使用 2.1 软件的安装 2.2 软件使用 2.2.1 增加设备 2.2.2 从设备下载人员信息 2.2.3 修改人员信息(改名字,调动部门等) 2.2.4 上传人员信息到设备 2.2.5 下载考勤数据 2.2.6 时间段设置 2.2.7 班次管理 2.2.8 人员排班 2.2.9 统计报表 一考勤机快速使用 1.1登记指纹(分彩屏跟黑白屏) 从设备上采集指纹: (1)彩屏:长按M/OK键--“用户管理”点OK--“新增用户”点OK--选择工号,- 往下翻在“指纹登记”上点OK,同一个手指按三次,完成后再点击OK键,再放上另一个手指按三次--往下翻到完成上点OK。(如果要再登记指纹可在‘用户管理‘点OK--’管理用户‘点M/OK---点M/OK选择’---- 查找用户‘—输入工号点OK—点M/OK选择“编辑用户”然后选择登记指纹,登记完成后---往下翻到完成上点M/OK。 (2)黑白屏录指纹的跟彩屏类似就不再说了。录备用指纹的话跟彩
屏有点区别:按M/OK—用户登记—指纹登记—提示新登记—按ESC键—跳出备份登记—输入工号—登记指纹。。 1.2机器的功能介绍 (1)通讯设置—设置通讯方式有RS232/485通讯,TCP/IP,USB 通讯 (2)系统设置—参数设置(包含提示声音,键盘声音,时间设置算法切换(高端机器如iclock360, S20等)--数据维护(删除考勤机上的记录数据【记录要定时去删除】,清除管理权限【管理员破解】,清除全部数据----恢复设置(恢复出厂设置【不会删除考勤机上的数据只是恢复机器出厂的通讯设置等】; (3)系统信息—可以查看设备的人员登记数跟指纹数及考勤记录数-------设备信息可以查看设备的序列号、算法版本、MAC地址、出厂时间等。 (4)U盘功能(包含下载跟上传的功能) <1>(1)把U盘插到考勤机上--长按M/OK键进入菜单--选择U盘管理--下载数据--下载用户数据--下载完成后退出然后把U盘拿下来插到电脑上。 <2> (1)打开考勤软件--点击软件最左上角数据--选择菜单里“USB闪盘管理”,然后选择菜单里对应的选项(黑白屏机器选择第一项,彩屏机器选择第三项)--在对话框的左上角第一栏“导入用户数据到电脑”上点击--最后再点击“从U盘导入用户数据”--导入完成后关闭。
FH24路舵机控制器使用说明书 飞鸿科技 2012-5-24 一、产品介绍 (1) 二、功能特点 (3) 三、接口说明 (4) 四、指令说明 (6) 五、16路舵机调试软件使用说明 (7) 二、连接PC上位机 (9) 三、上位机界面编辑 (10) 四、单路舵机调试 (11) 五、动作组编辑 (12) 六、注意事项及故障解决 (13) 产品介绍 一、 一、产品介绍 设计该舵机控制板是为了方便新手学习多路舵机的控制。多路舵机控制并不很复杂,但至今网上关于多路舵机控制的资源很少,当前淘宝上的舵机控制板也都不提供程序代码。由于这些原因,大批的机器人爱好者不能掌握多路舵机控制。使得很多机器人爱好者停滞不前,在这些最基本的地方浪费大量时间,不能不精力放到更高层的机器人控制方面的研究。如果每个人
都从头做起,整体的进步必将非常的缓慢。别人做好的东西我们不妨拿来学习,这样要节省很多的时间与精力。在这个基础上继续前进,做出属于自己的更高级的机器人。 由于本人在这些基础的东西上耗费的大量的精力,导致我没有时间去做高级的控制,如自平衡,语音识别等。大学接近尾声,没能让自己的机器人进一步升级感到非常遗憾。 基于方便学习的原则,本板子的设计有一下几个特点: 1、选用大家熟悉的,容易掌握的51单片机。但不是普通51单片机,是功能强大的增强型单片机STC12C5A60S2。 有人说51控制的精度肯定不如ARM。是的,这是明显的事实。但是我用ARM的芯片来写教程,只能给少数人看,而且如果那个人ARM掌握的都很好了,也不需要看此教程了。该控制板设计的目的就是给机器人初级爱好者学习,仅仅因为这一点,选择51单片机是最恰当不过了。 我最初做的32路舵机控制板就是在arm芯片上做的,那些不适合新手学习,在51上学会了舵机控制的基本方法,等你会使用更高级单片机的时候可以很容易的移植到上面,实现更多舵机,更高精度的控制。 STC12C5A60S2单片机属于增强型51。他兼容传统的51单片机,也就是说,你原来的学习的、编写的51程序不用改动就能在这个单片机上直接使用,不会出现问题,而且速度提高8~12倍。但是它与传统51相比,在速度性能与资源方面都有了很大的提升。 (1)60K的flash程序存储器。89C52只有8K。 (2)1280字节的SRAM。你课本上学的RAM只有128字节。1280足够用了,省去外部扩展的麻烦。 (3)两个串口。 (4)独立波特率发生器。做机器人定时器往往很不够用,而传统51单片机串口通信还要占用定时器,有了独立波特率发生器就可以节省出一个定时器。 (5)PCA模块。可以硬件输出快速PWM。可以扩展出两个定时器。 (6)8路A/D转换通道。A/D转换在机器人、各种比赛中都很常用,使用这款单片机就不必再做AD转换电路。 2、程序下载接口、IO口引出。该板是单片机最小系统板+16路舵机控制板。不是单纯的舵机控制板,而是一款可以用来学习、编程、二次开发的开发板。可以直接用来参加比赛,DIY,毕业设计。 5、详细的教程,丰富的资料。该板子是淘宝中唯一提供程序代码、可以学习的舵机控制板。提供原理图、接口示意图、程序代码、上位机软件。另外购买该产品赠送本人搜集的单片机开发常用工具软件,机器人资料,单片机视频教程以及丰富的例程。
ZKtime5.0考勤软件说明书 * 操作5.0考勤软件几大步骤就是: 目录 1. 维护/设置:(人员维护、部门表、管理员设置、数据库设置) (2) 人员维护(设备中下载人员信息) (2) 人员维护(表格编号人员信息导到软件中) (5) 部门表 (10) 管理员设置 (11) 数据库设置 (14) 2.设备维护中的几种连接方式及有关设备操作:(连接设备、从设备下载记录数据(附有如何用U盘导数据)、从设备下载人员信息、数据管理) (14) 有关设备的操作 (14) 从设备下载记录数据 (15) 用U盘从设备中下载用户数据和记录数据 .........................................................................错误!未定义书签。从设备下载人员信息 (16) 上传人员信息到设备 (17) 设备管理 (17) 3.人员排班:(时间段维护、班次管理、人员排班) (18) 时间段维护 (18) 班次管理 (21) 人员排班 (22) 固定的加班上下班的打卡时间 (24) 加班时间上班时间固定,下班时间不固定 (25) 加班上班不打卡,加班下班打卡 (28) 智能排班 (28) 4.统计报表:(统计结果明细、班次明细情况、其他异常情况(附有如何设公出、请假图)、考勤统计汇总表、加班统计、报表预览) (30) 统计结果明细情况 (30) 班次明细情况 (31) 其他异常情况 (33)
节日维护和假类设置 (33) 考勤统计汇总 (35) 加班统计 (36) 报表预览 (36) 确掌握这几点,就能灵活、快捷的运用我们的考勤软件。 1. 维护/设置:(人员维护、部门表、管理员设置、数据库设置) * 人员维护: 1人员维护操作说明:(第一种方法) A 先在考勤机里面登记员工的指纹,然后安装考勤软件,再把考勤机和电脑连接点从设备下载人员信息:(如下图1) 如图2:
普瑞玛激光切割机说明书 普瑞玛激光切割机可加工范围3000*1500毫米,最大定位速度每分钟140米,最大钣材中了800公斤,发生器功率2500W,3000W,及4000W,最大加速度6G所谓激光切割就是将激光束照射到工件表面时释放的能量来使工件融化并蒸发,以达到切割和雕刻的目的,具有精度高,切割快速,不局限于切割图案限制,自动排版节省材料,切口平滑,加工成本低等特点,讲逐渐改进或取代于传统的切割工艺设备。激光源一般用晶体或二氧化碳激光束,所需要的功率也不是很大,一般在几十瓦到几百瓦左右只和普通的家用电器的功率差不多,一般在切割的时候还配备有告诉风冷或水冷设备,能是工件在加工的时候更加的稳定.意大利普瑞玛激光切割机主要由六个部件组成:机架,光路系统(激光机),电路,工作平台,水路,操作软件。 普瑞玛激光切割机原理
激光是一种光,与自然界其电发光一样,是由原子(分子或离子筝)跃迁产生的,而且是自发辐射引起勺。激光虽然是光,但它与普通光明显不同是激光仅在最初极短的时间内依赖于自发辐射,此后的过程完全由激辐射决定,因此激光具有非常纯正的颜色,几乎无发散的方向性,雕刻机,极高的发光强度。激光同时又具有高相干性、高强度性、高方向性,激光通过激光器产生后由反射镜传递并通过聚集镜照射到加工物品上,使加工物品(表面)受到强大的热能而温度急剧增加,使该点因高温而迅速的融化或者汽化,配合激光头的运行轨迹从而达到加工的目的。激光加工技术在广告行业的应用主要分为:激光切割、激光雕刻两种工作方式,对于每一种工作方式,我们在操作流程中有一些不尽相同的地方。 激光雕刻:主要是在物体的表面进行,分为位图雕刻和矢量雕刻两种:位图雕刻:我们先在PHOTOSHOP里将我们所需要雕刻的图形进行挂网处理并转化为单色BMP格式,而后在专用的激光雕刻切割软件中打开该图形文件。根据我们所加工的材料我们进行合适的参数设置就可以了,而后点击运行,激光雕刻机就会根据图形文件产生的点阵效果进行雕刻。 矢量雕刻:使用矢量软件如Coreldraw,AutoCad,Iluustrator等排版设计,并将图形导出为PLT,DXF,AI格式,打标机,然后再用专用的激光切割雕刻软件打开该图形文件,传送到激光雕刻机里进行加工。 在广告行业主要适用于木板、双色板、有机玻璃、彩色纸等材料的加工。 普瑞玛激光切割:我们可以理解为是边缘的分离。对这样的加工目的,我们应该先在CORELDRAW、AUTOCAD里将图形做成矢量线条的形式,气动打标机,然后存为相应的PLT、DXF格式,用激光切割机操作软件打开该文件,根据我们所加工的材料进行能量和速度等参数的设置再运行即可。
舵机及舵机的控制 1.什么是舵机: 在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 还是看看具体的实物比较过瘾一点: 2.其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3.舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为 0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关 系是这样的:
0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 请看下形象描述吧: 这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有关了。一些前辈喜欢用555来调舵机的驱动脉冲,如果只是控制几个点位置伺服好像是可以这么做的,可以多用几个开关引些电阻出来调占空比,这么做简单吗,应该不会啦,调试应该是非常麻烦而且运行也不一定可靠的。其实主要还是他那个年代,单片机这东西不流行呀,哪里会哟! 使用传统单片机控制舵机的方案也有很多,多是利用定时器和中断的方式来完成控制的,这样的方式控制1个舵机还是相当有效的,但是随着舵机数量的增加,也许控制起来就没有那么方便而且可以达到约2微秒的脉宽控制精度了。听说AVR也有控制32个舵机的试验板,不过精度能不能达到2微秒可能还是要泰克才知道了。其实测试起来很简单,你只需要将其控制信号与示波器连接,然后让试验板输出的舵机控制信号以2微秒的宽度递增。
上位机软件接口说明 1.基于数据流的socket编程接口 a.基于数据流的socket编程流程如下图1所示。上位机软件是服务器,月 球车软件是客户机。 图 1 基于数据流的socket编程流程 b.上位机服务器侦听自己IP地址和端口7001,等待客户机Socket连接。 等到客户机connect()操作的上位机等待并读取客户机的“请求数 据”,上位机处理服务请求后,写入“答应数据”给客户机,其流程如 上图所示。 客户机发起请求,上位机答应请求,命令总长度是40个字节,上传图像数据命令长度例外,命令长度不够40字节,数据内容填0. 客户机发给上位机通讯命令格式如下: 起始码(0x55, 1字节)+长度(2字节,包括命令码和数据内容)+命令码 (1字节)+数据内容(长度-1字节)
上位机回应客户机通讯命令格式如下: 取反起始码(0xaa, 1字节)+长度(2字节,包括命令码和数据内容)+取反命令码(1字节)+数据内容(长度-1字节) 客户机发给上位机具体命令码定义: 1. 0x01 客户机请求启动月球车 数据内容:无 2. 0x02 客户机请求上传图像 数据内容:需要传输图像总共有多少字节 3. 0x03 客户机上传图像数据 数据内容:图像数据 4. 0x04 客户机请求上传采集数据 数据内容:采集数据 上位机回应客户机具体命令码定义: 1. 0xFE 上位机回应客户机是否启动月球车请求 数据内容:第1字节为0马上启动,非0表示月球车等待非0秒后再发启动月球车请求。 2. 0xFD 上位机回应客户机上传图像请求 数据内容:第1字节为0马上启动,非0表示月球车等待非0秒后再发上传图像请求。 3. 0xFC 上位机回应客户机上传图像数据是否成功 数据内容:第1字节为1成功,0失败 4. 0xFB 上位机回应客户机上传采集数据请求 数据内容:第1字节为1成功,0失败 举例说明: 1. 客户机请求启动月球车及回应命令示例 客户机发给上位机请求启动月球车命令为 0x55 0x00 0x25 0x01 0x00, ... 0x00 (总共40字节),其中0x00 0x25为命令+数据内容长度,为37个字节,0x01为命令码,数据内容全是0。 上位机回应客户机可以马上启动月球车命令为 0xaa 0x00 0x25 0xFE 0x00, ... 0x00(第1字节数据为0) 2. 客户机请求上传图像及回应命令示例
前言 感谢您购买正天数控激光雕刻机,该设备是光、机、电一体化的高科技产品。为了您能更好的使用及维护该设备,请仔细阅读说明书,并按照说明书的步骤操作。 本手册详尽介绍了设备的特点、结构、安装调试、操作流程及日常维护保养与安全注意事项等方面的知识。选用本公司配套ACE软件的用户,请在“软件使用手册”中查看软件的使用方法及具体参数。使用时如有解决不了的故障,请与本公司当地售后服务中心联系,我们时刻为您贴心服务。 重要声明! 因使用不当或不遵守操作规程引起的任何损失,公司概不负责。 本手册最终解释权归北京开天科技××公司所有,公司保留修改本手册中一切资料、数据、技术细节等的权利。 北京正天恒业数控技术××公司 2019.01.06 安全注意事项 ★在操作设备之前,用户务必认真阅读本操作手册,严格遵守操作规程。 ★激光加工可能存在风险,用户应慎重考虑被加工对象是否适合激光作业。 ★加工对象及排放物应符合当地的法律、法规要求。 ★本设备使用四类激光器(强激光辐射,该激光辐射可能会引起以下事故:①点燃周边的易燃物;②激光加工过程中,因加工对象的不同可能会产生其它的辐射及有毒、有害气体;③激光辐射的直接照射会引起人体伤害。因此,设备使用场所必须配备消防器材,严禁在工作台及设备周围堆放易燃、易爆物品,同时务必保持通风良好。
★设备所处环境应干燥,无污染、无震动、无强电、强磁等干扰和影响。工作环境温度10-35℃,工作环境湿度5-95%(无凝水。 ★设备工作电压:AC220V,50HZ。当电网电压不稳或不匹配时,禁止开机。 ★雕刻机及其相关联的其它设备都必须安全接地,方可开机操作。 ★设备在开机状态下,必须有专人值守,如出现异常状况应立即切断所有电源,并积极采取相应措施;人员离开前必须切断所有电源,严禁擅自离开。 ★严禁在设备中放置任何不相干的全反射或漫反射物体,以防激光反射到人体或易燃物品上。 ★设备应远离对电磁干扰敏感之电气设备,可能对其产生电磁干扰。 ★激光设备内部有高压或其它潜在的危险,非专业人员严禁拆卸。 D系列激光雕刻机使用说明及维护手册I 目录 第一章D系列激光雕刻机简介 (1 1.1. 机器外观 (1 1.2. 随机配件 (2 1.3. 产品特点 (2 1.4. 主要技术参数 (3 1.5. 计算机配置要求 (5 第二章机器的安装调试 (6 2.1. 激光器的安装 (6
全自动电容电桥测试仪上位机软件 4.1 软件功能简介 此配套工具软件用来将仪器中的数据上传至PC机,供试验人员对数据做进一步分析和处理。 4.2 软件特点 ●本软件为绿色软件,无需安装便可使用 ●支持Windows系列操作系统,运行速度快,使用方便 4.3 运行环境 硬件设备要求:建议赛扬533及以上CPU,512MB及以上内存、1GB及以上可用硬盘空间。 支持软件:Windows98、Windows2000、WindowsXP、Windows2003、Vista、Windows7等Windows系列操作系统;Microsoft Office 2000及以上版本(必须包含Excel)。 4.4 随机光盘文件 打开随机配置的光盘,将光盘内的文件拷贝到本地计算机文件夹中,打开文件目录如图4.1所示。 图4.1 光盘目录 图标①:USB驱动程序 图标②:CONFIG.INI为配置文件 图标③:“全自动电容电桥测试仪.exe”,双击文件即可运行程序 图标④:产品说明书
4.5 PC机通信连接线使用方法 首次与PC联机需要安装USB驱动程序,连接好USB连接线后,打开仪器电源,电脑将会出现发现新硬件的提示,同时弹出安装驱动软件的提示,选择“从列表或指定位置安装”,如图4.2所示。 图4.2 USB驱动安装(高级) 点击“下一步”,在弹出的对话框中,“在搜索中包括这个位置”打勾,点击“浏览”,选中本安装光盘的盘符,点击“下一步”,自动完成安装USB驱动,如图4.3所示。 图4.3 USB驱动安装(浏览) 4.6 软件操作说明 1.通信连接线连接好后,打开仪器电源,待仪器进入图3.1所示主界面后,点击“数据通信”,然后运行“全自动电容电桥测试仪.exe”,如图4.4所示。
ZKTeco考勤软件说明书 * 操作5.0考勤软件几大步骤确实是: 名目 1. 爱护/设置:(人员爱护、部门表、治理员设置、数据库设置)2 人员爱护(设备中下载人员信息)2 人员爱护(表格编号人员信息导到软件中)2 部门表 3 治理员设置3 数据库设置4 2.设备爱护中的几种连接方式及有关设备操作:(连接设备、从设备下载记录数据(附有如何用U盘导数据)、从设备下载人员信息、数据治理)4 有关设备的操作4 从设备下载记录数据6 用U盘从设备中下载用户数据和记录数据错误!未定义书签。 从设备下载人员信息7 上传人员信息到设备7 设备治理7 3.人员排班:(时刻段爱护、班次治理、人员排班)7 时刻段爱护7 班次治理8 人员排班8 固定的加班上下班的打卡时刻8 加班时刻上班时刻固定,下班时刻不固定8 加班上班不打卡,加班下班打卡9 智能排班9 4.统计报表:(统计结果明细、班次明细情形、其他专门情形(附有如何设公出、请假图)、考勤统计汇总表、加班统计、报表预览) 9统计结果明细情形10
班次明细情形 10 其他专门情形 10 节日爱护和假类设置11 考勤统计汇总 11 加班统计12 报表预览12 确把握这几点,就能灵活、快捷的运用我们的考勤软件。 1. 爱护/设置:(人员爱护、部门表、治理员设置、数据库设置) * 人员爱护: 1人员爱护操作讲明:(第一种方法) A 先在考勤机里面登记职员的指纹,然后安装考勤软件,再把考勤机和电脑连接点从设备下载人员信息:(如下图1) 如图2: 人员信息下载下来就会在人员爱护里面: 如人员爱护中的登记号码不是按顺序排列就点此操作:(如正常排列,跃过此操作) 爱护/设置中——系统设置——常规 然后再人员爱护编辑好了名字就点上传人员信息到设备: 以上确实是考勤机上传下载编辑姓名操作方法. B 第二种确实是把你们公司的人员姓名按照人员爱护下面的格式编辑成Excel的格式,然后转换成CSV的格式在人员爱护里面:如下图
第一章激光切割方法 1.1 激光熔化切割 在激光熔化切割中,工件被局部熔化后借助气流把熔化的材料喷射出去。因为材料的转移只发生在其液态情况下,所以该过程被称作激光熔化切割。 激光光束配上高纯惰性切割气体促使熔化的材料离开割缝,而气体本身不参于切割。 ——激光熔化切割可以得到比气化切割更高的切割速度。气化所需的能量通常高于把材料熔化所需的能量。在激光熔化切割中,激光光束只被部分吸收。 ——最大切割速度随着激光功率的增加而增加,随着板材厚度的增加和材料熔化温度的增加而几乎反比例地减小。在激光功率一定的情况下,限制因数就是割缝处的气压和材料的热传导率。 ——激光熔化切割对于铁制材料和钛金属可以得到无氧化切口。 ——产生熔化但不到气化的激光功率密度,对于钢材料来说,在104W/cm2~105 W/cm2之间。 1.2 激光火焰切割 激光火焰切割与激光熔化切割的不同之处在于使用氧气作为切割气体。借助于氧气和加热后的金属之间的相互作用,产生化学反应使材料进一步加热。由于此效应,对于相同厚度的结构钢,采用该方法可得到的切割速率比熔化切割要高。 另一方面,该方法和熔化切割相比可能切口质量更差。实际上它会生成更宽的割缝、明显的粗糙度、增加的热影响区和更差的边缘质量。 ——激光火焰切割在加工精密模型和尖角时是不好的(有烧掉尖角的危险)。可以使用脉冲模式的激光来限制热影响。 ——所用的激光功率决定切割速度。在激光功率一定的情况下,限制因数就是氧气的供应和材料的热传导率。 1.3 激光气化切割 在激光气化切割过程中,材料在割缝处发生气化,此情况下需要非常高的激光功率。 为了防止材料蒸气冷凝到割缝壁上,材料的厚度一定不要大大超过激光光束的直径。该加工因而只适合于应用在必须避免有熔化材料排除的情况下。该加工实际上只用于铁基合金很小的使用领域。 该加工不能用于,象木材和某些陶瓷等,那些没有熔化状态因而不太可能让材料蒸气再凝结的材料。另外,这些材料通常要达到更厚的切口。
舵机控制板使用说明V1.2 产品特点 ●采用32位ARM 内核的处理器芯片 ●独创的在线升级机制,用户可以在线升级固件 ●自动识别波特率 ●采用USB和UART通讯接口 ●1us的控制精度(相当于舵机的0.09度) ●可以同时同步控制32个舵机(24路舵机控制板可以同时同步控制24个,16路舵机控制板可以同时 同步控制16个舵机) ●内置512K 存储芯片,可存储上百个动作组 ●功能强大的电脑软件(内置3种语言,简体中文、繁体中文、英语) ●拥有Android手机控制软件 供电 舵机控制板需要2个电源: 舵机电源和芯片电源 舵机电源(正极):VS(图中3号位置的蓝色接线端子的左端) 舵机电源(负极):GND(图中3号位置的蓝色接线端子的中间) 舵机电源的参数根据实际所接舵机的参数而定,如TR213舵机的供电电压是4.8-7.2V,那么舵机电源就可以用电压在4.8-7.2V之间的电源。 芯片电源(正极):VSS(图中3号位置的蓝色接线端子的右端)
芯片电源(负极):GND(图中3号位置的蓝色接线端子的中间) VSS的要求是6.5-12V,如果芯片供电是从VSS端口输入的,那么电源的电压必须是6.5-12V之间。 另外: 1. 图中2号位置的USB接口可以给芯片供电,所以USB接口和VSS端口,任选其一即可。 2. 图中1号位置也可以给芯片供电,标记为5V和GND,5V是正极,GND是负极,供电电源的电压必 须是5V。 3. 图中1、2、3号位置都可以给芯片供电,任选其一即可。 4. 图中4号位置的绿色LED灯是芯片电源正常的指示灯,绿色灯亮,表示芯片供电正常,绿色灯灭,表 示芯片供电异常。 5. 图中5号位置的绿色LED灯是舵机电源正常的指示灯,绿色灯亮,表示舵机供电正常,绿色灯灭,表 示舵机供电异常。 如果需要控制舵机,2个绿色的LED灯都亮是前提条件。
中控考勤机详细操作说 明书 The manuscript was revised on the evening of 2021
中控考勤机说明书 1考勤机的使用 1.1登记指纹 1.2考勤机功能介绍(通讯,参数设置,系统信息,U盘管理) 2考勤软件的使用 软件的安装 软件使用 2.2.1 增加设备 2.2.2 从设备下载人员信息 2.2.3 修改人员信息(改名字,调动部门等) 2.2.4 上传人员信息到设备 2.2.5 下载考勤数据 2.2.6 时间段设置 2.2.7 班次管理 2.2.8 人员排班 2.2.9 统计报表 一考勤机快速使用 登记指纹(分彩屏跟黑白屏) 从设备上采集指纹: (1)彩屏:长按M/OK键--“用户管理”点OK--“新增用户”点OK--选择工号,- 往下翻成后再点击OK键,再放上另一个手指按三次--往下翻到完成上点OK。(如果要再登记点M/OK选择’---- 查找用户‘—输入工号点OK—点M/OK选择“编辑用户”然后选择登(2)黑白屏录指纹的跟彩屏类似就不再说了。录备用指纹的话跟彩屏有点区别:ESC键—跳出备份登记—输入工号—登记指纹。。 机器的功能介绍 (1)通讯设置—设置通讯方式有RS232/485通讯,TCP/IP,USB通讯 (2)系统设置—参数设置(包含提示声音,键盘声音,时间设置算法切换(高端机上的记录数据【记录要定时去删除】,清除管理权限【管理员破解】,清除全部数据--数据只是恢复机器出厂的通讯设置等】; (3)系统信息—可以查看设备的人员登记数跟指纹数及考勤记录数-------设备信息可厂时间等。 (4)U盘功能(包含下载跟上传的功能) <1>(1)把U盘插到考勤机上--长按M/OK键进入菜单--选择U盘管理--下载数据--下插到电脑上。 <2> (1)打开考勤软件--点击软件最左上角数据--选择菜单里“USB闪盘管理”,然后选择
激光切割机使用说明书 BYL-3015-B 北京万通博瑞金属加工有限公司 前言 很荣幸您购买我公司的产品,成为我公司的用户。 本说明所描述的是我公司生产的型号为BYL-3015-B的金属激光切割机。 本说明书详细介绍了切割机的安装,使用方法及相关维护步骤。在您使用本机器前请注意以下事项: 建议每一位与本机器有关的工作人员(维修、操作、日常维护、定点检查人员)都要阅读这本说明书; 操作者应具备相关的技术培训,或有专人指导; 如果您能遵循说明书中的提示,不仅可以避免危险事故,降低维修费用,减少停机检修时间,还可以提高机器的工作效率和使用寿命; 说明书应保存好以供随时查阅。 注意: 使用激光切割机前请详细阅读本说明,用户错误操作可能引起设备运行不良、设备损坏甚至造成人身伤害。 警告: 本切割机所用激光为不可见光,不可直视,否则可能造成眼睛伤害,使用时请佩戴护目镜。 目录 前言2 第一章简介 1.1 主要用途及特点 (4) 1.2 适用范围 (4) 1.3 产品型号及意义 (5)
第二章主要规格与技术参数 (5) 第三章产品的主要结构与原理 (6) 第四章产品的工作条件 (6) 第五章产品的系统说明 5.1 机械与传动系统 (7) 5.2 电气系统 (9) 5.3 气动系统 (10) 5.4 光学系统 (10) 5.5 水冷系统 (11) 5.6 切割头 (11) 第六章吊运与保管 6.1 开箱 (11) 6.2 机床的吊运与保管 (11) 第七章安装与调试 7.1 安装 (13) 7.2 调试 (13) 第八章使用与说明 8.1 安全使用 (14) 8.2 操作使用步骤 (15) 综述 (16) 9.2 日常维护与保养 (16) 9.3 运行时的维护与保养 (17) 9.4 长期停放的维护与保养 (17) 第十章常见故障及其排除方法 (18)
K1 考勤机使用说明书 注意事项及使用要求: 1.刷卡判断身份时将卡在本机感应区轻轻一晃即可,切勿用卡片拍打机器。 2.在初始化系统时,机器将会丢失原有参数设置,恢复出厂时的参数。 3 ?本机采用TCP和UDP通讯方式,按标准以太网布线方式进行布线。4.本机采集记录时要保证网络通讯的畅通。 5.经常保持机器清洁,防止水、油烟、灰尘、腐蚀性气体等侵入机内,以免影响机器的正常工作。 6.机壳表面沾有污垢和灰尘时,用干燥的细布擦干净,不得使用清洁液及其它化学溶剂,以免腐蚀机壳表面和流入机内损坏元器件。 7.本机发生故障,非专业人员不得打开机器,应与本机的供应商联系解决。 8.申请技术服务时,请提供本机购货合同号、产品序列号、故障现象。 第一章产品功能及技术参数 产品简介: 本机采用非接触式IC 卡感应技术进行身份识别,采用TCP 和UDP 通讯方式,具有快速的实时通讯功能。该机操作简单,方便易用,以考勤为主,附带开门功能。主要有以下功能:1.考勤功能。记录刷卡人员的刷卡时间,卡流水号等;刷卡时显示卡片上的中文姓名和卡编号(由用户定义,如工号,学号等) 2.门禁功能:刷卡时若是合法的身份卡则自动开门。还有密码开门、按钮开门功能。3.系统查看功能:可以查看每一条未采集的刷卡记录;查看记录总数,剩余空间;可以查看机器号和MAC地址;可以查询设备的IP地址和通讯端口。 4.系统设置功能:可以设置机器时间、机器号、开门密码、维护密码、网络参数。 5.维护检测功能:可以检测按键、刷卡检测、初始化系统等功能。 (以上功能操作,可见相关的操作说明) 产品特点: 1.用Mifare One IC 卡,射频信号交换数据,免接触,具有高保密、高可靠性。 2.LCD 大显示屏,可显示时间、日期、星期,刷卡时可以显示用户姓名(仅限中文),时间,卡编号等等。 3.采用触摸键盘输入数据,密封防尘,使用简单! 4.采用TCP 和UDP 通讯方式,可以与公司的局域网直接相连,方便易用。 5.实时通讯强。刷卡记录可以实时采集,同时可以对用户刷卡后立刻进行信息发布,如:生日快乐或任务安排等等。(信息发布功能视客户的考勤软件而定,需要软件的支持。 ) 6.与计算机联网使用(推荐联网使用),也可以脱机单独运行。
激光切割机软件使用说 明 (图文笔记版) 一、总体功能概述 ⑴操作软件的三大版块: 图一、ByVision主菜单操作界面。图二、HANDLING-OPERATION操作界面 图三、LaserView操作界面
⑵控制按键的两个部分:图一、操控手柄。
图二、屏幕右侧按键。
释放切割头 二、激光切割机每个版块的具体功能介绍
⑴ByVision(用户名:CH 密码:1) ①“MAIN(F5)”主菜单:其中包括“管理员”、“视图”、“诊断”、“清屏”、“信息”、“关 闭”。 “管理员”、“视图”:已设置好,一般无需改动。一般级别无法修改的。 “诊断”:用于显示机床的通讯状态,绿灯通讯为正常,红灯通讯中断或未建立通讯或没有该硬件(如Byloder)。前两个灯为绿,后一个灯为红,此时为正常。具体的机型不同而有异。 “清屏”:点击后屏幕为白色,此时触摸功能关闭,就可用布来擦拭屏幕。登录/注销:用于不同级别的用户进入系统,权限不一样的。
详细内容:当提示框出现提示内容的时候,由于显示的内容有限,当出现”……”的提示时可以在详细内容中看见全部的报警和故障。可以用该菜单中的RESET 键进行复位等操作。 信息:关于该机器的全部软件的版本。 关闭:内有可选择的关闭对话框。一般用关闭Byvision项目。 语言选择:根据国旗代表不同的语言。一般英语的故障解释比较确切。有故障时候尽量用英语将信息记录下来,便于准确判断。 ②“HAND(F6)”手动菜单:其中包括“设置参数机床”、“参数”、“手动功能”、“特殊 功能”“CNC”、“SERV”、“STOP PART”、“STOP WORK”。 a.prog reference: 程序定义的程序定义点。
舵机的原理,以及数码舵机VS模拟舵机 一、舵机的原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。 有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的:
收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF 判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20ms(即频率为50Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。
电动汽车驱动器上位机监控软件 用户手册 一、系统简介 电动汽车驱动器上位机监控软件是一款对电动汽车进行监控的软件。用户可以通过该软件了解电动汽车的实时位置,还可以了解到电动汽车的运行状态信息,方便用户可以更好的了解软件监控下的电动汽车运行信息。该软件操作简单、使用方便、绿色安全,是一款非常实用的软件。 二、运行环境 硬件环境:CPU:Intel E5-2620 V3,内存:32G DDR4,硬盘:500G 软件环境:Windows XP及以上操作系统 三、系统主界面 点击界面上的系统图标,就可以打开系统的主界面。详情如下图:
系统的主界面主要包括菜单栏、工具栏、操作窗口、主显示窗口、车辆全部信息窗口、信息窗口、膺图窗口、状态栏。 在该界面上用户可以查看到电动汽车的等信息,点击相应的按钮,就可以查看相应的信息。 车辆运行状态图: 点击界面上的状态按钮,就可以打开车辆运行状态图界面,在该界面上用户可以查看到软件控制下的电动汽车的运行状态信息。详情如下图:
四、操作 右击系统主界面上操作窗口中的任意一个驾驶员名称,就可以打开相应的操作子目录。操作功能主要包括查询操作、监控操作、控制操作、配置号码、恢复操作、配置信息、发送 信息、显示车辆信息,点击其中任意功能的按钮,就可以打开相应的子功能界面。
4.1查询操作 点击界面上的查询操作按钮,就可以打开查询操作的子目录,查询操作功能主要包括查询车辆位置、查询车辆状态、查询版本信息、查询终端功能、查询图片、PING终端。 4.1.1查询车辆位置 点击查询操作中的查询车辆位置按钮,就可以打开查询车辆位置的界面。详情如下图: 选择需要的通道之后点击界面上的完成按钮,就可以查看到车辆的位置信息。详情如下图:
Z K T i m e5.0考勤管理系统使用说明软件的快速使用流程 1、将在设备上登记好的用户的指纹或卡下载到软件中(连接设备-从设备下载人员数据) 2、在员工维护中将员工的姓名和其他资料修改后上传到设备中(连接设备-上传人员信息到设备) 3、给员工分部门(进入部门管理) 4、设置班次时间段(进入班次时间段维护) 5、设置班次(进入班次管理) 6、给员工排班(进入员工排班) 7、将设备上的考勤数据下载至软件中(连接设备-从设备下载记录数据) 8、查看考勤报表(进入考勤报表) 添加设备 软件要从设备中下载数据时,需要与设备建立通讯。因此首先将要连接的设备添加到系统中,输入相应的连接参数,连接机器后进行数据的上传与下载。 1.设备维护 在软件主界面上点击按钮设备维护或在“我的设备列表”区域内单击鼠标右键选择设备维护,在这里对设备进行添加、删除、修改。 系统有2个默认设备通讯参数,一个是RS232/RS485方式,一个是以太网方式。 某些特定机器还具有USB通讯方式(如XU500等),具体机型请参见相应的产品《用户指南》,使用方法请查询本说明。 2.添加 单击此按钮,弹出如下图所示的新增设备窗口: 用户可在此窗口中设置该设备的相关信息。输入相应设备的连接参数,保存即可,在左边的设备列表中会显示设备名称。
【删除】 如果设备已经不需要使用了,在左边的设备列表中单击要删除的机器名,再点击【删除】按钮,就可以从系统中删除该设备。 【保存】 如果对选中的设备的连接参数修改之后,需点击【保存】按钮,来将信息保存下来。 3.连接设备 已添加到系统的设备都会显示在“我的设备列表”中,在要连接的设备上单击选中,再点击连接设备按钮;或者在要连接的设备上单击鼠标右键,在出现的菜单中选择连接设备。 当系统开始连接设备时,在界面的右下方的连接状态栏中会显示“正在连接设备,请稍候”,然后会给出是否连接成功的信息。 如果连接失败,请检查 1)设备的连接参数是否与设备的菜单中的通讯参数相符。 2)通讯线是否连接好。 上传下载数据 这是管理软件与设备之间进行数据交换的窗口。通过此菜单,可以将设备上的用户信息和记录数据下载到软件中,也可以将软件中保存的用户信息和上传到设备中。进行下列操作时,需首先连接好设备。 从设备下载记录数据:下载设备中的全部验证通过的记录; 从设备下载人员信息:员工信息的下载,可以同时下载员工指纹; 上传人员信息到设备:员工信息的上传,可以同时上传员工指纹; 1、从设备下载记录数据 当系统与设备处于连接状态时,才可以进行下载数据的操作。直接点击主界面的右边“有关设备操作”栏的从设备下载记录数据;或进入设备管理菜单,选择从设备下载记录数据。 系统会提示“正在读取数据”,这时请稍等片刻,当数据下载完成后在页面右下方的状态栏中提示下载数据完成之后,设备与软件的通讯已经结束。下载之后的数据需要添加到系统,如果数据比较多时,可能需要的时间稍长。