
基于无人机光电载荷的图像处理器的设计
鲁剑锋
(长春光学精密机械与物理研究所长春130033)
摘要:无人机光电载荷是实现无人机侦查任务的重要设备。图像处理器能够准确的识别、跟踪目标,从而引导光电载荷以及无人机捕捉、定位目标,实现精确打击。系统采用TI公司的数字信号处理器芯片为核心处理器,配合可编程逻辑器件FPGA与外部管理MCU,来实现目标数据的采集与处理。针对机载设备的特点,设计充分考虑了体积、重量、功耗等要求,设计了小型图像处理器,应用于多台套机载光电载荷中,工作稳定可靠。
关键词:无人机光电载荷数字信号处理器图像处理器
Design of image System base on UA V electro-optical payloads
Lu JianFeng
( Changchun Institute of Optics, Fine Mechanics and Physics , Chang Chun, 130033) Abstract: The UA V electro-optical payloads are excellent means for reconnaissance. The image system is able to track target so that it can channel off the UA V electro-optical payload. The system used height-performance DSP (TMS320C6416) to realize the real-time digital image processing algorithm,it also used MCU to control the UART and field programmable gate array FPGA to control logic and preprocess the image. In order to fitting the demands of the UAV ,the tiny image system is designed . The image system has been solved the reliability and adaptability problem of in current UAV systems.
Key word: UA V, electro-optical payload, DSP, image processing
1、引言
随着美国在巴基斯坦对本.拉丹采取的行动,无人机作为一种特殊的战场武器,越来越引起各国的重视。特别是小型无人机,如美国陆军的“乌鸦”无人机等,以其隐蔽性强,操作简单,成本低的特点,成为各国军方关注的焦点。无人机载的光电侦查载荷,用来实现战场环境的监测,战场目标的识别、跟踪,作为最早装备的无人机任务载荷,探测手段也从原始的胶片照相机,发展到现今的可见光CCD、红外热像仪传感器以及激光指示器等多探测方式。2002年,“捕食者”安装了雷神公司研制的AN/AAS-52多频谱目标指示系统,该系统集成了红外、彩色光电照相机和激光指示器[1]。无人机上将继续安装多波段传感器,用户需要多频谱和高频谱数字光电设备,数据输出更适合于自动目标识别设备,能够定位易逝和伪装目标。图像处理器,作为判断、识别目标并引导光电任务载荷跟踪目标的主要设备,在现今的无人机侦查设备中,有着不可替代的作用。
2、无人机载设备的技术特点
无人机载设备根据无人机自身的特点,有着与其他载体设备不同的要求。
第一,无人机载设备受到无人机体积的限制,线路板的体积、形状都受到限制。
第二,由于无人机,特别是小型无人机的载荷能力有限,要求机载的任务载荷重量轻,以便飞机能够尽可能多样的携带任务载荷。例如EADS公司研制的微型无人机重量约500克,携带的传感器为重量仅为50克的照相机。美陆军“乌鸦”无人机和海军陆战队“龙眼”无
人机上的红外侦查设备是被称为“欧米茄”的红外照相机,重量不到200克,功耗小于1瓦[2]。
第三,无人机提供的电源功率有限,不能像地面设备一样,通过市电或者油机提供大功率电源,因此,要求机载的任务载荷低功耗。同时,无人机提供的电源范围较宽,通常要求载荷的适应性在24V±10V的范围内都能够正常工作[3]。
基于以上的特点,设计了基于TI的TMS320C6416DSP的小型机载图像处理器,系统尺寸为直径97mm的圆形,重量35克,电源范围为+12V到+36V之间,功耗小于5瓦。
系统采用DSP+FPGA+MCU的构架,实现了从图像数据的采集、处理到输出的过程。
3、机载小型图像处理器的硬件构成
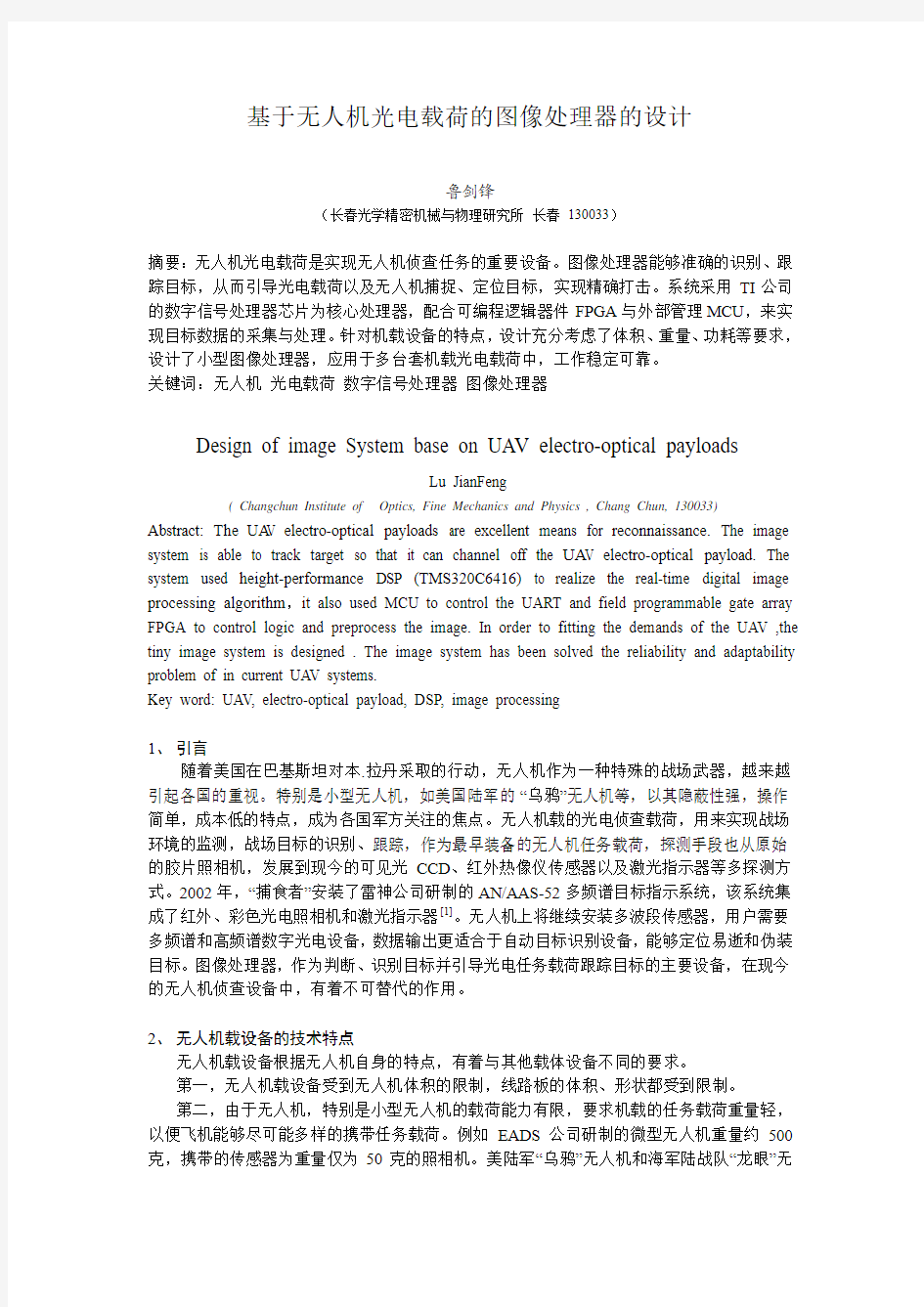
采用了美国TI公司的高速数字信号处理器,以TMS320C6416为核心,辅助现场可编程门列阵FPGA、使用MCU单片机C8051F023芯片以及高速的camera-link视频解码、编码器件等构成了实时的高速数字图像处理系统。系统的具体原理框图如下图1:
图1 DSP图像处理系统硬件原理框图
系统的工作原理为:Camera-link解码芯片DS90CR286接收由CCD给出的视频信号,经过解码得到图像信息、采样时钟以及行、帧同步信号,并将信号转化为标准TTL电平信号,发送给FPGA芯片中。FPGA芯片作为整个系统的逻辑、时序控制芯片,不仅控制图像数据的传输,同时,负责DSP与MCU的实时数据交换。系统时序以Camera-link解码出来的视频帧同步信号为整个系统的时统信号,这样,DSP芯片在图像的采集、图像数据的处理过程中,不会被通讯等其它事件所打断,而算出来的目标位置等信息能够实时的通过FPGA传输给MCU芯片,MCU芯片同样按照帧同步信号为消息,从FPGA芯片中读取DSP 的信息,同时,将系统对外串口得到的消息通过FPGA芯片发送给DSP。MCU负责系统的对外通讯工作,通过RS422串口芯片,实现与无人机系统的数据交换。MCU芯片对外通讯采用中断方式,收到外部通讯请求,立即响应中断,确保与系统的数据交换的实时性;通过FPGA对内的通讯,采取查询方式,在没有外部通讯中断的情况下,实时的查询帧同步信号,查询得到帧同步信号,则通过FPGA进行图像处理器内部的数据交换工作[4]。
图像数据的传输:Camera-link解码芯片将图像数据按照帧同步及采样时钟信号发送到FPGA芯片中,FPGA芯片将数据分成两路,一路提供给DSP,用作图像处理,另一路发送给Camera-link编码芯片。提供给DSP的图像数据,在FPGA芯片内部设置两个双端口RAM (DPRAM)[5],将奇数行与偶数行的图像数据分别交替写入两个DPRAM中。根据DSP芯片发出的指令,FPGA将相应区域的图像的第一行图像数据写入一个DPRAM中后,则通知DSP进行读取图像数据,在DSP读取图像数据的时候,FPGA将下一行的图像数据写入另一个DPRAM中,依次交替进行乒乓操作[6]。这样,在可选择的任意大小的范围内的图像数据依次存入DSP的内存中。同时,FPGA将用于输出的图像数据发送个Camera-link编码芯片DS90CR285,对图像进行Camera-link协议的编码,通过Camera-link接口输出。
系统的主要特点是:
●TMS320C6416 DSP处理器,处理能力可达4800MIPS;
●TMS320C6416 DSP带4Banks×512K×32Bit的SDRAM,时钟主频166MHz;
●TMS320C6416 DSP带8MBIT FLASH ROM[7];
●FPGA对图像进行滤波、边缘等预处理工作;
●MCU负责与外部进行串行数据通讯;
●具有JTAG端口,支持多处理器仿真器调试[8];
●低电平逻辑数字电路设计,降低功耗;
●全面采用小型表贴封装器件,减小PCB尺寸,增强系统可靠性;
3.1 TMS320C6416数字信号处理器
TMS320C6416是美国TI公司出品的TMS320C6000系列处理器中的一款,片内总线采用的是修正的哈佛总线结构[7] [8]。这里所选用的TMS320C6416GLZA6E3,DSP的时钟主频为600MHz,即指令周期速度达到了4800MIPS(兆条指令/S),采用了C6000系列通用的甚长指令字(VILW)结构,每个时钟周期读取指令总字长为256位。TMS320C6416采用片内的PLL电路对外部时钟进行倍频[8],在系统设计时采用50MHz的晶振,用片内的PLL电路12倍频,这样,避免了高频晶振及高频线路引起的电磁兼容问题。TMS320C6416片内集成了1M-BYTE的DATA RAM和PROGREM RAM[7]。
TMS320C6416通过两个外部存储器接口(EMIFA&EMIFB) [7]来进行片外存储器的访问。EMIF可以扩展的存储器包括[5]:
●Pipeline结构的同步突发静态RAM(SBRAM)
●同步动态RAM(SDRAM)
●异步器件,包括SRRAM,FLASH,FIFO等[8]
TMS320C6416芯片的EMIF接口,系统选用SDRAM(HY57V653220B),用作DSP的缓存,接口采用DSP芯片提供的无缝接口,接口速度为1/2CPU CLOCK。[9]系统DSP扩一片SDRAM,为4Banks×512×32bit,占用CE2空间[9]。
图像数据从FPGA到DSP的传输,由EDMA控制寄存器把图像数据以EDMA方式导入DSP中[7]。DSP使用异步存储器接口与FPGA片内的DPRAM相连接,通过EDMA进行图像的导入工作[10],不占用DSP芯片的CPU资源,而是由EDMA控制器来完成图像导入的工作,从而将DSP的CPU资源完全提供用来实现图像处理算法[11]。
图像处理器采用1片FLASH(AM29LV800)作为程序存储器,存储DSP的程序,上电复位时将程序自举[12],导入DSP内。本系统采用MAP1存储器映射方式[13],FLASH闪存占用DSP的EMIFB16位接口空间,SDRAM与双口RAM占用DSP的EMIFA32位接口空间[14]。
3.2 逻辑主控FPGA芯片
系统选用的主控逻辑芯片是Altera公司的Cyclone Ⅱ系列的EP2C35F672I8,芯片的核电压为1.2V,IO接口电压为3.3V,同时支持1.5V、1.8V和2.5V LVTTL电平的IO输入和输出[8]。低电平的IO电压,为高速信号传输提供了可能,确保图像数据存储的实时性和完整性[2]。FPGA的配置芯片采用EPCS4串口ROM芯片,系统上电,EPCS4芯片将程序自举加载到FPGA中[9] [12]。
3.3 对外通讯管理芯片MCU
无人机系统的实时通讯往往与图像的帧信号不是同步的,而这二者又都是要求实时性,因此,图像处理器在设计上选用了Silicon Labs公司的C8051F023单片机芯片,用作对外通讯的管理芯片,配合FPGA芯片,完成图像处理器与无人机系统及图像处理器内部的数据交换工作。这样,既保证了图像处理器与系统的数据交换的实时性,又保证了DSP在图像
处理过程中的连续性[4]。
C8051F023芯片采用高速的8051μC的核,具有很好的兼容性。芯片使用3.3V电源供电,较比传统5V供电的单片机的功耗更小。C8051F023芯片提供内置的2M-16MHz的可编程的时钟振荡器[8]。图像处理器采用芯片内部的16MHz的时钟,作为芯片的工作时钟。芯片内部提供4K字节的数据存储器以及64K字节的Flash程序存储器。
3.4 上电程序加载与复位
图像处理器采用TI公司的TPS3824复位芯片作为整板的上电复位芯片。DSP以及DSP 的程序存储芯片、MCU芯片和串口芯片等都使用TPS3824的复位信号。而FPGA芯片因为不需要复位信号,所用,由FPGA芯片提供TPS3824的看门狗信号[12]。
系统的DSP芯片,FPGA芯片以及MCU芯片都需要上电进行程序的加载工作。其中,DSP与FPGA芯片从片外的存储器进行程序加载,MCU芯片从芯片内部的Flash存储空间进行程序的加载。这样,产生了程序加载的时序问题,即DSP与MCU加载没有完成,FPGA 已经加载完毕并发出了相应的初始化的指令;或者DSP加载完毕,而FPGA没有完成程序的加载,造成DSP与MCU之间的初始化指令不通等故障。为了避免产生加载时序的问题,图像处理器在设计上选择了应答的模式。FPGA芯片不需要复位芯片提供的复位信号,同时,FPGA芯片提供给复位芯片看门狗信号,也就是说,FPGA不提供看门狗信号了,复位芯片将会进行图像处理器系统的复位[9]。因此,在DSP与MCU程序设计时,设计应答激活模式[13]。FPGA芯片加载完成后,将向DSP芯片与MCU芯片发出固定地址的高电平信号。DSP 与MCU芯片在程序设计中,在初始化工作完成后,即在循环中等待,读取相应地址的信号。收到信号,则证明FPGA芯片已经初始化完成,立即向FPGA发出应答信号,同时,可以进行图像处理或者系统通讯的工作。若没有收到信号,则表示FPGA芯片初始化没有完成,DSP与MCU就在循环中不停的读取相应地址信号,直至收到FPGA的信号为止。FPGA芯片初始化完成后,发出相应的信号,然后等待DSP与MCU的应答信号,同时,发送固定电平信号给复位芯片的看门狗[15]。若1.6秒钟内仍未得到DSP与MCU的应答信号,则复位芯片进行系统的复位,DSP与MCU重新进行复位,程序加载。
4、结论与展望
基于无人机光电载荷的图像处理器,采用DSP+FPGA+MCU的硬件结构,体积小:只有一块直径为97mm的圆形线路板;重量轻:图像处理器重量为35g;功耗低:整板功率小于5W。同时,整板采用小型、贴片型器件,系统的可靠性高。完全能够满足无人机光电载荷的任务需要,在已装备的无人机飞行试验中,性能可靠,表现良好。
参考文献
[1] 石岚等.外军无人机光电侦查监视载荷研究[J].红外与激光工程,2007 Val.36 No.9,103-106.
[2] 秦明,朱会,李国强. 军用无人机的的发展趋势[ J ]. 飞航导弹, 2007Val.6 36-38
[3] 韩冰.战术无人机的任务载荷与发展分析[ J ].舰船电子工程, 2007Val.27No.3,31-35
[4] 代少升,张新立.利用单片可编程系统对红外焦平面阵列进行实时非均匀性校正[J].光学精密工程2009 Val.17 No.4,854-858
[5] 刘彬,房建成,刘刚.基于TMS320C6713B+FPGA数字控制器实现磁悬浮飞轮主动振动控制[J].光学精密工程2009 Val.17 No.1,151-157.
[6] 陈升来,黄廉卿,郭静寰.基于整型提升小波变换的图像处理及DSP 实现[J].光学精密工程2006 Val.14 No.3,498-502.
[7] TMS320C64xx Peripherals Reference Guide. Texas Instruments Incorporated,1999.
[8] TMS320C64xx CPU and Instruction Set Reference Guide. Texas 9 TMS320C6x Optimizing C Compiler
User Guide. Texas Instruments Incorporated,1999.
[9] 姜培培,裘燕青,傅志辉,杨丁中,沈永行.基于DSP 和FPGA的多路型光纤光谱仪系统[J].光学精密工程2006 Val.14 No.6,944-948.
[10] 王晓东,刘文耀,金月寒,郑伟.基于DSP 和CPLD 的激光雷达图像采集和显示集成系统[J].光学精密工程2004 Val.12 No.2,190-194.
[11] 许廷发,赵思宏,周生兵,倪国强.DSP并行系统的并行粒子群优化目标跟踪[J].光学精密工程2009 Val.17 No.9,236-240.
[12] 代少升,袁祥辉.提高DSP图像处理系统实时性的一种有效方法[J].光学精密工程2003 Val.11 No.6,617-620.
[13] 张思芳,李正明.一种实时成像跟踪系统的研究[J].光学精密工程2002 Val.10 No.6,573-577.
[14] TMS320C62xx Peripherals Reference Guide. Texas Instruments Incorporated,1999.
[15] 朱明,鲁剑锋,赵建,秦于华.基于TMS320C6202 DSP的实时数字图像处理系统的设计[J].光学精密工程2003 Val.11 No.5,497-501.
多光谱成像探测追踪及反制防控一体化系统NVT-9800XUS系列
综述: 多光谱热成像无人机追踪防控一体化系统,集成超长焦可见光透雾高清网络摄像机、远距离被动红外热成像探测器、智能识别模块、伺服重型云台和干扰器于一体,实现多光谱、多通道昼夜互补成像,在低照度、恶劣天气、夜间等全天候24小时昼夜监测。 系统支持快速接收来自雷达扫描或频谱扫描定位低空、慢速、小目标可疑信号,通过多光谱摄像机系统全天候、全屏幕、全时段自动快速锁定和精确追踪;通过一体化防控平台,可远程对可疑目标进行自动或者手动的快速、有效处置。自动调整电磁干扰频率和方向,干扰无人机的数据链路和导航链路,切断无人机和遥控器之间的通讯和导航,从而迫使无人机自动降落或将其驱离,保障低空空域安全。 此系统操作简便、防御范围广,可组网控制、持续作业。非常适用于各种需要禁止民用小型无人机(低小慢航空器)进行飞行、航拍的机场周边、突发事件现场、安保现场、重要活动现场、涉密单位空域以及各种防止无人机坠落伤人的场所。它可以为公安边海防,军事设施周界,机场港口等大场景重点安保场所提供可靠的全天候(无光/逆光/强光,雨/雪/雾等)环境低小慢航空器监测追踪反制防控整体解决方案。 应用场景: 广泛应用于机场、监狱、水(核)电站、政府机关、领导驻地、军事禁区、会议中心、体育场馆等需要24小时全天候监测的重要安保场所。 功能特性: 高清晰图像分辨率 提供全实时1080P 高清分辨率可见光图像和960P分辨率热成像图像。内置伽玛补偿、色彩增强和数字细节增强(DDE)引擎,提供卓越的高清视频图像和细腻的图像细节。 多光谱全天候监测 可见光与红外热成像集成探测,适应多种恶劣天气环境。在夜间全黑、光线不足、低对比度、阳光直射、灌木丛林区域,恶劣天气、烟尘和雾霾天气环境都可以有效成像。提供实时视觉评估和识别,区域闯入及报警,目标跟踪及报警,提供全天候运动目标检测及清晰通透的活动图像。 远距离探测和目标发现 选配300mm/550mm/800mm级超长、自动聚焦可见光高清一体机,选配25-100mm / 25mm ~ 210mm红外热成像系统,集成先进的同步自动变焦和快速对焦算法,根据目标视场的大小,镜头快速变倍至指定倍数,同时聚焦至指定位置,可快速探测识别空中低小慢可疑航空器目标。避免手动聚焦在无人机处于远距离情况下导致系统判断不准确,聚焦不到位、操控延时大、目标丢失等问题。 实时接入雷达或频谱检测系统 可支持雷达和频谱检测系统以UDP 协议或RS422协议接入,雷达或频谱实时的将检测的位置信息传输给光电伺服系统,引导光电系统以快速、精准的控制(方位加减速、镜头变焦、聚焦)锁定目标,实现对目标的跟踪、确认、打击。新目标出现或老目标丢失后,光电系统重新查询雷达或频谱的目标位置信息,光电
无人机喷洒农药控制系统设计 陈爱国 (泰州学院,江苏泰州225300) 摘 要:农药喷洒采用无人机技术能减少环境污染、提高喷洒效率。现对无人机的控制量进行重点设计,使无人机能够精确跟踪无线指令,满足现代农业对农药喷洒的需求。 关键词:多旋翼无人机;农药喷洒;控制系统;设计 0 引言 我国是农业大国,其农药喷洒主要由人工完成,这种方式 已经严重威胁到工作人员的身心健康,且对农药的利用率低。无人驾驶飞机UAV(UnmannedAerialVehicle)是近年来发展比较快、在很多领域都有应用的一种新技术装备,在农业生产中使用多旋翼无人机技术进行农药喷洒作业有独特的优点,比如作业高度低、定点定向喷洒、解放人力、效率高、维修成本低等,特别是旋翼产生的涡流,可以使农药喷雾更好地附着在农作物上,提高农药防治病虫害的效率。 1 总体设计 无人机结构简单 、维修方便,其控制系统一般采用模块化设计,总体结构如图1所示。 图1 系统组成框图 多旋翼无人机的结构比较复杂,它需控制6个自由度,需 要利用精度高的传感器和精确的姿态数据。与无人机通讯采用无线方式,主要控制旋翼电机,控制电机的信号一般采用PWM波形即可,输出给电子调速器。 2 硬件设计 硬件的选择较为关键,在系统设计时需充分考虑微处理器的数据处理精度和浮点运算能力、传感器型号、各类芯片级联电平的匹配等问题。比如微处理器采用STM32F427VIT6,集成加速度和三轴陀螺仪的MPU6000芯片,电子罗盘采用HMC5843芯片,气压传感器采用MS5611芯片。在无线通讯时,直接采用PPM(PulsePositionModulation)方式对控制系统进行信号的控制,为了更好地控制无人机姿态,还需采用超声波测距模块,用来锁定无人机的高度。 硬件系统结构设计如图2所示,无人机运行时,旋翼电机产生的电流较大,且无人机姿势不断变化,其控制电流随之变化,会产生电磁干扰,造成通讯控制信号出错, 特别是超声波测距模块与控制芯片不能直接级联,需要进行电平转换, 如图3所示。 图2 硬件系统结构图 图3 电平转换电路 为了防止旋翼电机在姿态变化时,反向电压通过电子调速 器反馈给微处理器,可能造成电压过大烧毁器件,需要加接隔离电路。同时为了有效控制电机转速,采用高频PWM 信号控制电机转速,更需要隔离电路,如图4所示。 图4 隔离电路 3 软件设计 软件程序设计,必须满足无人机喷洒各种控制要求,主要 包含三大部分:第一,需要考虑无人机与遥控器之间的通讯联系,特别是各种姿态控制量发生变化时,无人机能及时响应,若发生通讯异常,一般采用中断程序来判断,执行中断后,无人机能执行既定程序并报警;第二,输入信号捕获,(下转第115页)
主要内容 ?无人机任务规划的基本概念三 ?无人机任务规划方法三 ?无人机任务规划的数字地图技术三 ?无人机地面控制站的基本概念三 ?无人机地面控制站的分类二配置和转移运输三 5.1 无人机任务规划的基本概念 由于无人机是无人驾驶的飞行器,所以在飞行前需要事先规划和设定好它的飞行任务和航线三在飞行过程中,地面操纵人员还要随时了解无人机的飞行状态,根据需要操控无人机调整姿态和航线,及时处理飞行中遇到的特殊情况,以保证飞行安全和飞行任务的完成三这就需要配备能够提供任务规划与指挥控制方面相应功能支持的设备或系统,这就是无人机的任务规划与指挥控制系统三 5.1.1一任务规划的定义和特点一 1.任务规划的定义 一一规划是一个综合性的计划,它包括目标二政策二程序二规则二任务分配二要采取的步骤二要使用的资源以及为完成既定行动方针所需的其他因素三 任务规划(M i s s i o nP l a n n i n g,M P)是对工作实施过程二方法的组织和计划三在军事领域,任务规划已逐渐变为一个专有名词,尤其是现代无人化装备的出现,使得任务规划越来越重要三装备作战规划的结果是装备作战行动的实施依据三对有人化装备而言,规划结果 主要作为任务承担人员决策的参考;但对无人化装备而言,规划即控制,是装备运行过程中
137 一 唯一的执行依据,因此,任务规划的输出信息必须满足准确性二完整性和一致性的要求三 2.任务规划的特点 任务规划具有以下几个特点: (1)制作任务规划时需要具有整体性二全局性的思考和考量三 (2)制作任务规划须以准确的数据为基础,运用科学方法进行从整体到细节的设计三 (3)任务规划须在实际行动实施之前进行,其结果要作为实际行动的具体指导三5.1.2一 任务规划系统的定义和功能一 1.任务规划系统的定义一一任务规划系统( M i s s i o nP l a n n i n g S y s t e m ,M P S )是指利用先进的计算机技术采集二存储各种情报信息,进行大规模分析计算,从而辅助制定任务计划的信息系统三任务规划系统的出现和广泛使用是现代意义的任务规划区别于过去所说的作战计划二作战筹划的根本标志三 2.任务规划系统的功能 作为整个信息化作战系统的一个重要节点,任务规划系统不是一个孤立的封闭系统,它一端与作战指挥系统的任务对接,另一端与作战装备直接交联,如图 5-1所示,主要包括信 息采集与处理模块二规划作业模块二任务预演评估模块和任务输出模块 三图5-1一任务规划系统基本组成结构 (1)信息采集与处理模块三任务规划系统需要采集的信息主要包括上级下达的任务信息二指挥控制信息二情报信息(如目标信息二敌作战意图等)和战场环境信息(敌情二我情二地形二气象二电磁)等三对采集的信息要进行加工处理,包括地形和气象信息显示,禁飞区二威胁区及战场态势标绘等三 (2)规划作业模块三该模块用于制定装备作战过程的时间二空间和行为准则,通常包括航线规划和机载设备使用规划,以及与其他作战实体的协同和交互规划等三根据任务规划系统所具有的自主化能力大小,通常还包括冲突检测二安全评估二自动的威胁规避和航线生成等分析计算模块,用于辅助人工决策操作三 (3)任务预演评估模块三规划效果预演主要包括飞行仿真二载荷作战效果仿真等,评估包括装备本身的效能评估和任务规划的作战行动效能评估两个方面三预演评估的主要作用是对装备作战的效果进行预估和判断,并反馈以指导决策,形成优化规划方案,同时便于指挥员和操作员熟悉作战过程,了解和把握作战关键环节三 (4)任务输出模块三任务输出是将规划结果以数据的形式输出给作战装备和其他作战节点三输出的任务规划信息应该是完备二一致和可理解的,能够被其他信息系统正确读取和
无人机市场调查报告 二零一四年二月 该报告将结合中航文创园发展无人机产业,从当前以及未来国内外无人机发展趋势和对无人机系统的需求,针对无人机系统的发展方向、发展目标、主要发展技术以及无人机系统发展路线图等方面进行了全面、系统的调研, 为中航文创园发展无人机系统产业提供支撑。 一、基本概念 无人机是不搭载操作人员,采用空气动力为飞行器提供升力,能够自动飞行或远程引导,可一次性或多次重复使用,携带各类有效载荷的有动力空中飞行器。无人机要完成相应任务,需与任务载荷、测控与信息传输系统、地面保障系统等配合工作,无人机与以上各类设备组成的完整系统称为无人机系统。无人机系统可由单个无人机构成,也可由多个同型的无人机或由多型多个无人机共同构成。
图一:无人机系统组成框图 (一分类情况 无人机种类很多, 不同的无人机可以完成不同的特殊任务。一般来讲, 可以按照“续航时间和航程分类”和“军事用途分类”两种方法进行分类, 分类示意如图2 所示。 1.按照续航时间和航程分类 根据航程、活动半径、续航时间和飞行高度不同, 可分为长航时无人机(又称战略无人机、中程无人机、近程无人机和短程无人机。长航时无人机: 长航时无人机是一种飞行时间长, 能昼夜持续进行空中探测和执行其他任务的无人机。长航时无人机又可分为高空型和中空型两类。高空型飞行高度多在1 8 0 0 m以上, 续航时间超过24 小时, 中空型飞行高度一般低于1 10 0 m ,续航时间超过12 小时。在高空长航时无人机中, 美国的“全球鹰”和“暗星”无人机最具代表性;中空长航时无人机中, 美国的R Q-lA“捕食者”、“猎人”无人机、英国“凤凰”无人机等具有代表性。
无人机任务载荷 大多无人机系统便升空执行任务,通常需要搭载任务载荷。任务载荷一般与侦察、武器投射、通信、遥感或货物有关。无人机的设计通常围绕所应用的任务载荷进行。有些无人机可携带多种任务载荷。任务载荷的大小和重量是无人机设计时最重要的考虑因素。大多数小型商用无人机要求任务载荷的重量不超过5磅。有部分小型无人机制造商采用可快速拆卸和替换的任务载荷。 就侦察任务和遥感任务而言,传感器任务载荷根据不同任务可采用许多不同形式,包括光电摄像机、红外摄像机、合成口径雷达、激光测距仪等。光学传感器组件即可永久安装在无人机上,以便传感器操作员获得固定的视角,也可安装在万向节或转塔上。万向节或转塔安装系统使传感器能够在预定范围内转动,通常绕两个轴转动。万向节或转塔即可通过自动驾驶系统,也可以通过独立的接收机来接受输出信号。有些万向节还装有震动隔离装置,可降低飞度。震动隔离方法有两种,一种是采用弹性/橡胶安装座,另一种是采用电子陀螺仪稳定系统。 光电 光电摄像机通过电子设备的转动、变焦和聚焦来成像,在可见光谱工作,所生成的图像形式包括全活动视频、静止图片或二者的合成。大多数小型无人机的光电摄像机采用窄视场到中视场镜头。大型无人机的摄像机还可使用宽视场或超宽视场传感器。光电传感器可执行多种任务,还可与其他不同类型的传感器结合使用,以生成合成图像。关电摄像机大多在昼间使用,以便大可能提高视频质量。 红外 红外摄像机在红外电磁频谱范围内工作。红外传感器也称为前视红外传感器,利用红外或热辐射成像。无人机采用的红外摄像机分为两类,即冷却式和非冷却式。现代冷却式摄像机由低温制冷器制冷,可降低传感器温度到低温区域。这种系统可利用热对比度较高的中波红外波段工作。冷却式摄像机的探头通常装在真空密封盒内,需要额外功率进行冷却。总而言之,冷却式摄像机生产图像质量比非冷却式摄像机的质量要高。 非冷却式摄像机传感器的工作温度与工作环境温度持平或略低于环境温度,当受到探测到的红外辐射加热时,通过所产生的电阻、电压或电流的变化工作。非冷却式传感器的设计工作波段为7~14纳米的长波红外波段。在此波段上,地面温度目标辐射的红外能量最大。
无人机飞行路线控制系统设计 由于无人机是通过无线遥控的方式完成自动飞行和执行各种任务,具有安全零伤亡、低能耗、重复利用率高、控制方便等优点,因此得到了各个国家、各行各业的高度重视和广泛应用。尤其以美国为代表,无论是在军事、民用、环境保护还是科学研究中,都将无人机的使用发挥到淋漓尽致,其拥有全球最先进的“捕食者”和“全球鹰”战斗无人机、监测鸟类的“大乌鸦”无人机、民用用途的“伊哈纳”无人机等等。我国在无人机研制方面也取得了一定的成就,拥有技术卓越的“翔龙”和“暗箭”高空高速无人侦查机、多用途的“黔中”无人机、探测海洋的“天骄”无人机、中继通讯的“蜜蜂”无人机等等。在未来,随着现代化工业技术、信息技术、自动化技术、航天技术等高新技术的迅速发展,无人机技术将日趋成熟,性能日益完善,为此将拥有更为广阔的应用前景。为确保无人机能够有效地完成各种飞行任务,研发者开发了各种技术方式的飞行控制系统,完成对无人机的起飞、飞行控制、着陆以及相应目标任务等操作的控制。飞行路线控制是飞行控制系统中最基础也是最核心的功能控制部分,其它所有的飞行任务控制都是飞行路线控制的基础之上实现。目前对于无人机飞行路线的控制已有各种各样方式的系统,但大多数系统都存在一定缺陷,如有些系统操作过于繁杂,不够智能化;有些系统只能在视距范围遥 控无人机,严重限制了无人机的使用;有些系统过于专用化,不能适用于大多数类型的无人机;有些比较完善的系统,造价又过于昂贵,等等一系列问题。针对以上存在的这些问题,本课题提出了一种成本低、
遥控距离远、智能化、高效化、适用性广的无人机飞行路线控制系统设计方案。该系统方案包括两大部分,一部分是操作人员所处的地面监控系统,一部分是无人机端的受控系统,实现的机制主要是无人机不断地将自身的定位信息实时地传送给地面控制系统,地面控制系统将无人机位置信息通过电子地图可视化显示给操作人员,操作人员结合本次飞行任务,采用灵活的鼠标绘制方式在地图上绘制预定的飞行路线,地面控制系统对绘制路线进行自动处理生成可用的路线控制信息帧并发送给无人机受控系统,无人机受控系统接收到位置控制信息帧,不断结合实时的方位信息得到飞行控制信息,从而遥控无人机按照预定路线飞行。此外,为方便用户以后对历史数据的查看,以分析总结得到一些有价值的信息,地面监控系统还包含了对预定路线和无人机历史飞行路线的存储、查询和在地图中回放功能。基于GIS技术的地面监控系统的具体实现是在Windows操作系统上,采用Visual Basic作为系统开发环境并结合MSComm串口通信技术、Mapx二次开发组件技术、Winsock网络接口技术以及Access数据库技术完成软件设计,实现与无人机受控系统的无线通信、GIS系统操作和监控、历史数据存储和重现等,其中实验区域的电子地图采用Mapinfo Professional开发软件绘制完成,并创新性地设计并绘制了画面简洁的带高层信息的二点三维矢量地图,而对于绘制路线的优化和提取处理采用了垂距比值法和最小R值法。无人机端使用BDS-2/GPS双卫星系统对无人机实时位置进行高精度的定位,采用双串口单片机进行运算控制处理,实时的飞行控制信息采用了几何空间算法得到,另外采
G001、无人机是指根据无人机需要完成的任务、无人机的数量以及携带任务载荷的类型,对无人机制定飞行路线并进行任务分配。 A.航迹规划 B.任务规划 C.飞行规划 正确答案:B(解析:P174) G002、任务规划的主要目标是依据地形信息和执行任务环境条件信息,综合考虑无人机的性能,到达时间、耗能、威胁以及飞行区域等约束条件。为无人机规划出一条或多条自 的,保证无人机高效,圆满的完成飞行任务,并安全返回基地。 A.起飞到终点,最短路径 B.起飞点到着陆点,最佳路径 C.出发点到目标点,最优或次优航迹 正确答案:C(解析:P174) G003、无人机任务规划是实现的有效途径,他在很大程度上决定了无人机执行任务的效率 A.自主导航与飞行控制 B.飞行任务与载荷导航 C.航迹规划与自主导航 正确答案:A(解析:P174) G004、无人机任务规划需要实现的功能包括 A.自主导航功能,应急处理功能,航迹规划功能 B.任务分配功能,航迹规划功能,仿真演示功能 C.自主导航功能,自主起降功能,航迹规划功能 正确答案:B(解析:P174) G005、无人机任务规划需要考虑的因素有、,无人机物理限制,实时性要求 A.飞行环境限制,飞行任务要求 B.飞行赶任务范围,飞行安全限制 C.飞行安全限制,飞行任务要求 正确答案:A(解析:P175) G006、无人机物理限制对飞行航迹有以下限制:,最小航迹段较长度,最低安全飞行高度 A.最大转弯半径,最小俯仰角 B.最小转弯半径,最小俯仰角 C.最小转弯半径,最大俯仰角 正确答案:C(解析:P175) G007、动力系统工作恒定的情况下,限制了航迹在垂直平面内上升和下滑的最大角度 A.最小转弯半径 B.最大俯仰角
无人机驾驶 职业技能等级标准
目录 前言﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍1 1范围﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍2 2规范性引用文件﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍2 3术语和定义﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍2 4对应院校专业﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍3 5面向工作岗位(群)﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍4 6职业技能要求﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍4参考文献﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍12
前?言 本标准按照GB/T 1.1-2009给出的规则起草。 本标准起草单位:北京优云智翔航空科技有限公司、中国航空器拥有者及驾驶员协会、北京航空航天大学、中国民用航空飞行学院、长沙航空职业技术学院、滨州学院、南京理工大学、天津现代职业技术学院。 本标准主要起草人:王英勋、兰玉彬、段志勇、陈铭、张会军、孙毅、柯玉宝、王夏峥、郝琦、王汉清、何宁、孟雅妮、张力、陈海霞、孙芳芳、梁文广。 声明:本标准的知识产权归属于北京优云智翔航空科技有限公司,未经北京优云智翔航空科技有限公司同意,不得印刷、销售。
1范围 本标准规定了无人机驾驶职业技能等级对应的工作领域、工作任务及职业技能要求。 本标准适用于无人机驾驶职业技能培训、考核与评价,相关用人单位的人员聘用、培训与考核可参照使用。 2规范性引用文件 下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本适用于本文件。 Manual on Remotely Piloted Aircraft Systems(RPAS)(ICAO-Doc10019)民用无人机驾驶员管理规定(AC-61-FS-2018R2) 轻小无人机运行规定(AC-91-FS-2015-31) 民用无人机驾驶员合格审定规则(T/AOPA0008-2019) 3术语和定义 国家、行业标准界定的以及下列术语和定义适用于本文件。 3.1无人机(UA:Unmanned Aircraft) 是由控制站管理(包括远程操纵或自主飞行)的航空器。也称远程驾驶航空器(RPA:Remotely Piloted Aircraft)。 3.2无人机系统(UAS:Unmanned Aircraft System) 也称远程驾驶航空器系统(RPAS:Remotely Piloted Aircraft Systems),是指由无人机、相关的控制站、所需的指令与控制数据链路以及批准的型号设计规定的任何其他部件组成的系统。 3.3无人机系统驾驶 是指操控无人机系统完成既定飞行任务,负责整个无人机系统运行和安全。
精心整理 1. 无人机______是指根据无人机需要完成的任务、无人机的数量以及携带任务载荷的类型,对无人机制定飞行路线并进行任务分配。 A. 航迹规划 B. 任务规划 C. 飞行规划 答案:B. 2. 任务规划的主要目标是依据地形信息和执行任务环境条件信息,综合考虑无人机的性能、到达时间、耗能、威胁以及飞行区域等约束条件,为无人机规划出一条或多条自______的______,A. B. C. 答案 3. A. B. C. 答案4. A. B. C. 答案5. A. B. C. 答案6. A. B. C. 答案:C. 7. 动力系统工作恒定的情况下______限制了航迹在垂直平面内上升和下滑的最大角度。 A. 最小转弯半径 B. 最大俯仰角 C. 最大转弯半径 答案:B. 8. 无人机具体执行的飞行任务主要包括到达时间和进入目标方向等,需满足如下要求:______。 A. 航迹距离约束,固定的目标进入方向 B. 执行任务时间,进入目标位置 C. 返航时间,接近目标的飞行姿态
答案:A. 9.从实施时间上划分,任务规划可以分为______。 A.航迹规划和任务分配规划 B.航迹规划和数据链路规划 C.预先规划和实时规划 答案:C. 10.就任务规划系统具备的功能而言,任务规划可包含航迹规划、任务分配规划、数据链路规划和 系统保障与应急预案规划等,其中______是任务规划的主体和核心。 A.航迹规划 B.任务分配规划 C.数据链路规划 答案:A. 11. A. B. C. 答案 12. A. B. C. 答案 13. A. B. C. 答案 14. A. B. C.任务规划、返航规划和载荷分配 答案:A. 15.______包括携带的传感器类型、摄像机类型和专用任务设备类型等,规划设备工作时间及工作 模式,同时需要考虑气象情况对设备的影响程度。 A.任务规划 B.载荷规划 C.任务分配 答案:B. 16.______包括在执行任务的过程中,需要根据环境情况的变化制定一些通信任务,调整与任务控 制站之间的通信方式等。 A.链路规划 B.目标分配
2.1 ARM-Cortex M4架构 ARM-Cortex M4 架构: 无人机控制系统可以采用基于ARM系统架构的嵌入式处理器来实现,本次 重点基于ARM-Cortex M4架构的无人机飞控系统。 ARM是32位嵌入式微处理器的行业领先提供商,到目前为止,已推出各 种各样基于通用体系结构的处理器,这些处理器具有高性能和行业领先的功效,而且系统成本也有所降低。 基于ARMv7架构以上的Cortex系列主要分为A(应用处理器)、R(实时 处理器)、M(微控制器)三大应用系列。其中Cortex-M系列处理器主要是针 对微控制器领域开发的,在该领域中,既需进行快速且具有高确定性的中断管理,又需将逻辑门数和功耗控制在最低。Cortex-M处理器是一系列可向上兼容 的高能效、易于使用的处理器,这些处理器旨在帮助开发人员满足将来的嵌入 式应用的需要。这些需要包括以更低的成本提供更多功能、不断增加连接、改 善代码重用和提高能效 ARM-Cortex 的特点: 更低的功耗:以更低的 MHz 或更短的活动时段运行,基于架构的睡眠模式支持,比 8/16 位设备的工作方式更智能、睡眠时间更长 更小的代码(更低的硅成本):高密度指令集,比 8/16 位设备每字节完 成更多操作,更小的 RAM、ROM 或闪存要求 易于使用:多个供应商之间的全球标准,代码兼容性,统一的工具和操作 系统支持 更有竞争力的产品:Powerful Cortex-M processor,每MHz 提供更高的
?Cortex-M4是一个32位处理器内核 ?内部的数据路径是32位的,寄存器是32位的,存储器接口也是32 位的 ?采用哈佛架构 ?小端模式和大端模式都是支持的 ?Thumb指令集与32位性能相结合的高密度代码 ?针对成本敏感的设备Cortex-M4处理器实现紧耦合的系统组件,降低处理器的面积,减少开发成本 ?ROM系统更新的代码重载的能力 ?该处理器可提供卓越的电源效率 ?饱和算法进行信号处理 ?硬件除法和快速数字信号处理为导向的乘法累加 ?集成超低功耗的睡眠模式和一个可选的深度睡眠模式 ?快速执行代码会使用较慢的处理器时钟,或者增加睡眠模式的时间?为平台的安全性和稳固性,集成了MPU(存储器保护单元) ?Cortex-M4内部还附赠了好多调试组件,用于在硬件水平上支持调试操作,如指令断点,数据观察点等 ?有独立的指令总线和数据总线,可以让取指与数据访问并行不悖 2.1.3 基于ARM Cortex-M4 内核的微控制器 ARM Cortex-M4内核是微控制器的中央处理单元(CPU),配合外围设备模块和组件,形成完整的基于Cortex-M4的微控制器。在芯片制造商得到Cortex-M4处理器内核的使用授权后,它们可以将Cortex-M4内核用在自己的硅片设计中,添加存储器,外设,I/O以及其它功能块。不同厂家设计出的单片机会有不同的配置,包括存储器容量、类型、外设等都各具特色。由于基于统一的内核架构,事实上本书后面所介绍的飞控软件和算法虽然已ST的 STM32F407为基础,它们是很容易移植到其他公司的同内核平台芯片上的,很多与外设无关的代码部分不需要任何改变即可移到其他平台上,仅需要关注外围设备相关部分的驱动代码。 ?飞思卡尔(现并入恩智浦)基于ARM Cortex M4内核的Kinetis K60微控制器系列。Kinetis微控制器组合产品由多个基于ARM@CortexTM_M4内核且引脚、外设和软件均兼容的微控制器系列产品组成。 ?ST基于ARM Cortex-M4内核的STM32 F4微控制器系列,具有高达 168MHz的主频,以及在此主频工作下的基准测试功耗为38.6mA
小型多用途无人机遥感系统技术规格书 小型多用途无人机是专门针对遥感监测任务而开发的高性能无人机。该无人机系统具有高可靠性和便捷的操纵性等优异品质,同时经过优化的气动布局,配备全自动弹射起飞和伞降系统,可加装高精度稳定砖塔、高光谱成像仪及全画幅数码相机等任务载荷,具备了完全自主化运营的特点,提供给用户更便捷、更可靠的操控、更灵活的运用以及对操纵人员更简化的培训要求,该无人机在同级别起飞重量的无人机中具有相对较长的航时。经过一系列的航测和遥感试验,固定翼无人机遥感系统已成功应用于航空摄影测量、灾情监测和评估、突发事件监控、森林防火和城市消防、国土资源调查等领域,成为航空遥感与监控的又一利器 产品概要:无人机采用了具备大升阻比和优异飞行性能的高升力翼型,
增大了机舱和油箱容积,提供更大的设备安装空间和更长的续航时间。最大任务载荷达到了公斤,可搭载更大像素的影像传感器。同时,该无人机系统自动化程度高,整个飞行过程采用全自动弹射起飞,全自动开伞回收,可极大的减小对飞行场地的依赖,对普通的用户的掌握起到了积极作用。
系统主要性能指标
系统技术关键点: 、采用高质量复合材料、高精度模具以及各类高精度的零部件和机电设备,有效地保证了系统的可靠性和稳定性; 、采用先进的以导航为基础的高精度飞控,经过系统集成和软件系统的二次开发,实现了满足光谱遥感和测量要求的航摄过程的全自动化和超视距作业; 、配备自主开发的航线规划软件,可根据测区多边形顶点坐标和各类光谱遥感、航测参数,如拍摄比例尺、重叠率等快速生成优化的飞行拍摄文件和任务报告; 、配备便携式地面控制站或笔记本电脑,可利用控制软件通过无线数据链实时监控无人机的飞行和作业状态,灵活掌控无人机的作业飞行;、专业高光谱相机和数码像机搭配自主开发的姿态稳定云台,可有效控制影像的姿态,使其在航测允许误差之内; 、陀螺稳定的光电砖塔平台,可使摄像机稳定在任意需要的位置进行连续视频监控; 、国内首创的光谱遥感无人机系统。将性能先进的光谱相机与自动化的无人机系统结合,在国内率先实现光谱遥感的小型化、实用化。 、飞机起降距离短,不需要专用跑道,有很强的场地适应性; 、飞机抗风能力强,在级风的气象条件下能稳定作业; 、系统拆装简便,可在分钟内完成组装、调试和回收,无需专用工具。所有设备可装载于一辆十座的中型客车上运输。
无人机市场调查报告 无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。无人机+行业应用,是无人机真正的刚需;目前在航拍、农业植保、测绘等领域的应用,大大的拓展了无人机本身的用途。下面有有小编整理的无人机市场调查报告,欢迎阅读! 一、基本概念 无人机是不搭载操作人员,采用空气动力为飞行器提供升力,能够自动飞行或远程引导,可一次性或多次重复使用,携带各类有效载荷的有动力空中飞行器。无人机要完成相应任务,需与任务载荷、测控与信息传输系统、地面保障系统等配合工作,无人机与以上各类设备组成的完整系统称为无人机系统。无人机系统可由单个无人机构成,也可由多个同型的无人机或由多型多个无人机共同构成。 (一)分类情况 无人机种类很多, 不同的无人机可以完成不同的特殊任务。一般来讲, 可以按照"续航时间和航程分类" 和"军事用途分类" 两种方法进行分类。 1.按照续航时间和航程分类 根据航程、活动半径、续航时间和飞行高度不同, 可分为长航时无人机(又称战略无人机)、中程无人机、近程无人机和短程无人机。长航时无人机: 长航时无人机是一种飞行时间长, 能昼夜持续进行空中探测和执行其他任务的无人机。 长航时无人机:又可分为高空型和中空型两类。高空型飞行高度
多在1 8 0 0 m以上, 续航时间超过24 小时, 中空型飞行高度一般低于1 10 0 m,续航时间超过12 小时。在高空长航时无人机中, 美国的" 全球鹰" 和" 暗星"无人机最具代表性;中空长航时无人机中, 美国的R Q-lA"捕食者"、"猎人"无人机、英国"凤凰"无人机等具有代表性。 中程无人机:中程无人机是一种活动半径为70 0~10 0 0k m左右,能在战前战后作大面积、快速侦查的无人机。它的速度一般较高,为高亚音速或超音速,一般采用自主飞行,有高空型和中低空型两类。中程无人侦察的代表机型主要有:美国的D—21、324 型" 金龟子" 和350 型无人机等。 短程无人机:短程无人机作战半径为15 0—3 5 0k m 左右,飞行速度为亚音速,多为小型无人机,适用于陆军的军、师级和海军陆战队的旅级部队,其代表机型主要有"瞄准手"、"不死鸟"、"玛尔特"、"猛犬"、"侦察兵"、"先锋"等。 近程无人机:近程无人侦察机活动半径在几km 到几十km 之间等。中飞行速度为10 0—3 0 0k/h,飞行高度为2019—4000m,适用于陆军和海军陆战队的旅或营级部队以及小型舰艇的战地监视,能及时准确地使指挥员了解战场动态,如以色列的" 微小—V型" 、"短毛猎犬"无人侦察机。 2. 按照军事用途分类 根据不同军事用途和作战任务,无人机又可分为靶机、无人侦察机、无人战斗机、通信中继无人机、诱饵无人机、电子对抗无人机和
解密无人机设计:如何实现图传? 如果说中国无人机制造商大疆创新的巨大估值和营收说明了什么,那就是无人机正日益变成一桩大生意。无人机现在已经引来众多资本竞相追逐,除此之外,各大半导体公司也都加快速度布局这一千亿级的市场,开发适合无人机应用的创新产品和技术。某知名无人机产品硬件供应商之一,世强的技术专家将在这一系列文章中独家阐述先进的无人机产品内部的硬件电路设计和相关方案技术。 当我们把目前主流的无人机的内部电路板拆解开来后,您会发现无人机的电路控制系统主要由三大部分组成:飞控系统、云台+相机、图像传输系统。而我们的这一无人机电路系统系列的三篇文章也将分别对应这三个部分。 图1.FPV无人机的内部电路系统结构图 无人机能够一跃进入大众视野并迅速升温,是很多人始料未及的。从刚开始的空中摄录,到后来的实时摄录,方便的图像传输功能无疑为无人机加足了筹码,赚足了眼球。在第一篇文章中,作者将为您分析无人机的图传实现技术。 2.4GHz全高清无人机图传系统是主流 在无人机的视频传输方面,高配的图传系统已经可实现5km/1080P30fps传输,但这是众多国内娱乐无人机厂商还没有做到的。一般的做法是在云台搭载相机,高空拍摄再飞回地面检查。这种方式由于不能即时看到拍摄画面,所以还不能满足航拍的要求。 “当然目前也有不少方案是采用5.8GHz频段传输模拟视频到地面,最远距离能达600多米。但这种方式需要在飞行器上将高清(1080P或4K)转码成720P,再转成数字信号传输到遥控器显示屏上,技术上也较复杂,并且画面会有马赛克、停顿或卡死。画面质量也不够好,用到专业航拍还有距离,适合普通爱好者娱乐。”世强产品总监阳忠介绍说。 2.4GHz是目前无人机市场比较主流采用的频段。在大疆最新发布的Phantom3上,就搭载了备受好评的DJI Lightbridg全高清数字图像传输系统,其内置了2.4G遥控链路,其高配方案实测有效传输距离高达5km,标配也达到了1.7Km。“图像传输系统的性能是区分无人机档次的一个关键因素。图像传输距离的远近,图像传输质量的好坏,图像传输的稳定性等是衡量无人机图传性能的关键因素。”阳忠说。 简而言之,无人机图像传输系统就是将天空中处于飞行状态的无人机所拍摄的画面实时稳定的发射给地面无线图传遥控接收设备。图像传输的实时性、稳定性是关键。如下图4所示为目前主流的无人机遥控器/高清图传线路框图。其组成部分主要由发射端、接收端和显示端三部分组成。
第38卷第4期激光与红外V o.l38,N o.4 2008年4月LA SER&I NFRA RED A pr i,l2008 文章编号:1001-5078(2008)04-0311-04#综述与评论#美国无人机的光电载荷与发展分析 王方玉 (空军驻京津地区军事代表室,辽宁锦州121000) 摘要:介绍了美国无人机光电载荷的发展历程以及装备的研制、改进情况,指出了在现代战 争中发展无人机的优势和重要性,重点探讨了几种无人机的性能及其特点,最后论述了美国无 人机的光电载荷与发展分析。 关键词:无人机;光电载荷;发展分析 中图分类号:TN97文献标识码:A E lectric-optic Load and Develop m ent Analysis of the A m erican UAV WANG Fang-yu (R es i dent R epresenta tive O ffi ce of A ir F orce in Be ijing-T ian ji ng,Ji n zhou121000,Ch i na) Ab stract:T he process o f deve l op m ent of the Am er ican UAV and equ i p m ents i n all countr i es over t he w or l d and its m odificati on are descr i bed.T he technique perfor m ance and properties of severa lUAV thea te seekers are ana l yzed;and the e l ectric-optic l oad and develop m ent analysis o f the Am erican UAV. K ey w ords:UAV;e l ectric-optic l oad;deve l op m ent ana l y si s 1引言 无人机采用先进的光电有效载荷,完成任务的能力将得到增强并最大限度地实现战场数字化,以提高其他武器系统的效能。本文就美国无人机的光电/红外传感器、红外传感器转塔、发展分析等,作进一步的研究和探讨[1]。 2光电/红外传感器 无人机的光电/红外传感器,主要包括:可见光传感器和红外光电传感器[2]。 可见光传感器的功能是光电成像,即将目标入射光子转变成对应像元的电子输出,最终形成目标的可见波段图像。目前最常用的器件是CCD和C MOS。CCD技术成熟,性能稳定,C MOS出现较晚,但由于功耗低等优点发展很快。 可见光传感器的主要性能指标:有效像元数、量子效率及其频段分布、最高帧频、读出噪声、热噪声等。 红外光电传感器的功能是红外波段的光电成像,即将目标入射的红外辐射(热辐射),转变成对应像元的电子输出,最终形成目标的热辐射图像。 红外光电传感器的主要性能指标:有效像元数、噪声等效温差(NETD)、工作温度和制冷方式、最高帧频、读出噪声、阵列均匀性和非线性误差。 例如,美国英迪戈系统公司的UL3红外摄像机,采用160@120微测辐射热计探测器阵列,使用F1.6镜头,可以获得优于80mK的灵敏度。包括光学系统在内,摄像机质量不到200g,需要的容积不超过50c m3,需要功率约1W。摄像机输出模拟视频和14比特数字信号。在/龙眼0无人机上可安装两台70g的摄像机和一台UL3红外摄像机,动力系统能够维持39m i n的飞行时间,拍摄时距离目标很近, 作者简介:王方玉(1964-),男,本科,工程师,研究方向为电子工程技术。 收稿日期:2007-10-01;修订日期:2007-11-01
无人机设计手册及主要技术 内容简介 独家《无人机设计手册》分上、下两册共十二章。 上册包括无人机系统总体设计,气动、强度、结构设计,动力装置,发射与 回收系统,飞行控制与管理系统。 下册包括机载电气系统,指挥控制与任务规划,测控与信息传输,有人机改装无人机,综合保障设计,可靠性、维修性、安全性和环境适应性以及无人机飞行试验等。有关无人机任务设备、卫星中继通信的设计以及正在发展的无人机技术等内容,有待手册再版时编入,使无人机设计手册不断成熟和丰富。 适用人群 本手册是国内第一部较全面系统阐述无人机设计技术的工具书,不仅可作为 无人机的设计参考,也可以作为院校无人机教学、无人机行业的工程技术人员和管理人员的参考书,并可供无人机部队试验人员使用。希望本手册的出版能对我国无人机研制工作的技术支持有所裨益。 作者简介 祝小平,现任西北工业大学无人机所总工程师,主要从事无人机总体设计、飞行控制与制导系统设计等研究工作。主持了工程型号、国防预研等国家重点项目多项,获国家和部级科学技术奖9项,其中国家科技进步一等奖1项,国防科技进步一等奖4项,获技术发明专利10项,荣立“国防科技工业武器装备型号研制”个人一等功,发表论著150多篇。先后入选国家级“新世纪百千万人
才工程”、国防科技工业“人才工程”和教育部“新世纪优秀人才支持计 划”,获得“国防科技工业百名优秀博士、硕士”、“国防科技工业有突出贡献的中青年专家”、“陕西省有突出贡献专家”和“科学中国人(2009)年度人物” 等荣誉称号。 无人机相关GJB标准- -融融网 gjb 8265-2014无人机机载电子测量设备通用规范 gjb 4108-2000军用小型无人机系统部队试验规程 gjb 5190-2004无人机载有源雷达假目标通用规范 gjb 7201-2011舰载无人机雷达对抗载荷自动测试设备通用规范 gjb 5433-2005无人机系统通用要求 gjb 2347-1995无人机通用规范 gjb 6724-2009通信干扰无人机通用规范 gjb 6703-2009无人机测控系统通用要求 gjb 2018-1994无人机发射系统通用要求 无人机主要技术 一、动力技术 续航能力是目前制约无人机发展的重大障碍,业内人士也普遍认为消费级多 旋翼续航时间基本维持在20min左右,很是鸡肋。逼得用户外出飞行不得不携 带多块电池备用,造成使用操作的诸多不便,为此有诸多企业在2016年里做出 了新的尝试。 1. 氢燃料电池
第33卷第6期指挥控制与仿真V ol.33 No.6 2011年12月Command Control & Simulation Dec. 2011 文章编号:1673-3819(2011)06-0005-03 舰载无人机光电载荷对海搜索方式与搜索宽度 谭安胜,贺凯,郭江龙 (海军大连舰艇学院,辽宁大连 116018) 摘 要:搜索方式与搜索宽度是舰载无人机对海搜索效率与搜索力配置研究的基础。基于舰载无人机及其光电载荷的性能特点,提出了舰载无人机对海搜索的七种基本搜索方式,并从不同的角度对舰载无人机对海搜索方式进行了分类,给出了搜索方式的选择方法;建立了舰载无人机光电载荷搜索宽度计算模型,为舰载无人机系统采用不同的搜索方式进行搜索时计算其搜索效率和搜索力的配置提供了决策依据。 关键词:舰载无人机;光电载荷;搜索方式;搜索宽度 中图分类号:E926.392 文献标识码:A DOI: 10.3969/j.issn.1673-3819.2011.06.002 The Search Method and Search Width of Optical Payload of Shipborne UAV for Sea Target TAN An-sheng, HE Kai, GUO Jiang-long (Dalian Naval Academy, Dalian 116018, China) Abstract: The search way and the search width are the basis of the study on the search efficiency. Based on the characteristic performance of the optical payload, seven basic methods of searching are proposed for the shipborne UAV searching the sea target, and the methods are divided into some types from different aspects, and provided the selecting ways. The search width model is constructed, based on which, the commander can make decision that how to configure the recourses to get the optimal efficiency. Key words: shipborne UAV; optical payload; search method; search width 舰载无人机保障驱护舰编队对海导弹攻击是一个复杂的、系统的决策运用过程,目标散布区域的“先验信息”是编队指挥员做出在何时将舰载无人机放飞至何处、采用何种方式对目标进行搜索、定位与引导等决策的基础。在已掌握目标散布区域的“先验信息”时,采用何种搜索方式进行搜索,不同搜索方式的搜索宽度如何度量,是舰载无人机保障驱护舰编队对海导弹攻击研究中必须解决的基本问题。 1 舰载无人机对海搜索方式及选择 舰载无人机使用光电载荷对海上目标进行搜索时,可根据具体的搜索任务(主要是根据战术机动区的大小、目标可能活动区域的大小,以及无人机的搜索能力)确定是由单机进行搜索还是多机编队进行搜索。为此,舰载无人机对海上目标的搜索可分为单机搜索和多机编队搜索。无论是单机搜索还是多机编队搜索,按无人机飞行方向和光电载荷视轴偏角及多机编队队形配置可分为多种搜索方式。 1.1 舰载无人机对海基本搜索方式 舰载无人机对海搜索的基本搜索方式可由光电载荷的视轴偏角β和无人机运动状态(运动、悬停)来 收稿日期:2011-06-06 修回日期:2011-07-06 作者简介:谭安胜(1963-),男,山东荣成人,博士,教授,主要研究方向为军事运筹、兵种战术、舰载 武器作战使用等。 贺凯(1986-),男,硕士研究生。 郭江龙(1988-),男,硕士研究生。定义。如果0 β=D,则称为纵飞推扫;如果090 β << D D,则称为纵飞侧扫;如果90 β=D,则称为 纵飞横扫;如果视轴在 00 βββ ?≤≤(β D 为给定值)内进行扇面搜索,则称为扇扫。由此,舰载无人机对海上目标的基本搜索方式分为七种,即纵飞推扫、纵飞侧扫、纵飞横扫、纵飞扇扫、悬停扇扫、纵飞环扫和悬停环扫。 七种基本搜索方式的搜扫宽度 c d不同,因此其搜索效率也就不同,当飞行高度h和视轴俯角θ一定时,c d由β唯一确定。 舰载无人机对海搜索方式按不同的区分标准可以有以下分类方式: ①按无人机数量分类:单机搜索和多机编队搜索。 ②按飞行方向与视轴方向的不同分类:纵飞推扫、纵飞侧扫、纵飞横扫、扇扫(包括纵飞扇扫、悬停扇扫)和环扫(包括纵飞环扫、悬停环扫)。 ③按混合分类法分类:单机纵飞推扫、单机纵飞侧扫、单机纵飞横扫、单机纵飞扇扫、单机悬停扇扫和单机悬停环扫以及多机编队纵飞推扫、多机编队纵飞侧扫、多机编队纵飞横扫、多机编队纵飞扇扫。1.2 舰载无人机对海搜索方式选择 舰载无人机对海搜索方式的选择,应根据目标散布区域大小、任务的紧迫程度、编队舰载无人机的数量和当时的战场环境等因素综合考虑。 如图1所示,M为目标散布中心, m d为敌编队 防空武器有效边界, tc d为舰载无人机光电载荷有效探 测距离, wm d为载舰对舰载无人机的有效控制距离(对应弧线aa′)。则图1中阴影区称为舰载无人机的“安