
一,竖直同步带及带轮选型计算: 竖直方向设计要求:托盘及商品自重20kg (196N ),滑块运动1250mm 所需时间6s 。 1,设计功率P K P A ?=d w w s m kg N kg kw Fv P 4.45)(9 .0625.1/8.920)(103=÷??=?=-η A K 根据工作情况查表取1.5 w w P K P A 1.684.455.1d =?=?= 2,带型选择 根据w P 1.68d =和带轮转速r/min 100=n 查询表格选择5M 圆弧带 3,带轮齿数z 及节圆直径1d 根据带速,和安装尺寸允许,z 尽可能选择较大值,通过查表选择 5M 带,齿数z=26,节圆直径m m 38.411=d ,外圆直径m m 24.400=d 4,带速v m a x 1/22.0100060v s m n d v <=?=π 5,传动比
主动从动带轮一致,传动比i=1,主动轮与从动轮同一个型号 6,初定中心距0a mm 1644a 0= 7,初定带的节线长度p 0L 及其齿数p z mm a d d d d a L p 34184)()(2202 212100=-+++≈π 8,实际中心距a mm L L op 16452a a p 0≈-+= 9,基准额定功率0P 可查表得w 50P 0= 10,带宽S b mm 06.10b 14.10 0S =≥P K K P b Z L d S (基准带宽9b S0=时) 11,挡圈的设置 5M 带轮,挡圈最小高度K=2.5~3.5 R=1.5 挡圈厚度t=1.5~2 挡圈弯曲处直径mm R d 24.432d 0w =+= 挡圈外径m m 24.482d f =+=K d w
第二章 管材的线膨胀及伸缩器 第一节 管材的线膨胀及伸缩量的计算 一、热膨胀量的计算 管道安装完毕投入运行时,常因管内介质的温度与安装时环境温度的差异而产生伸缩。另外,由于管道本身工作温度的高低,也会引起管道的伸缩。实验证明,温度变化而引起管道长度成比例的变化。管道温度升高,由于膨胀,长度增加;温度下降,则由于收缩,长度缩短。温度变化1度相应的长度成比例变化量称为管材的线膨胀系数。不同材质的材料线膨 胀系数也不同。碳素钢的线膨胀系数为12×10—6 /℃,而硬质聚氯乙烯管的线膨胀系数为 80X10— 6/℃,约为碳素钢的七倍。 管材受热后的线膨胀量,按下式进行计算: ()L t t L 21-=?α 式中△L ——管道热膨胀伸长量(m); α——管材的线膨胀系数(1/K)或(1/℃); t 2——管道运行时的介质温度(℃); t l ——管道安装时的温度(℃),安装在地下室或室内时取t 1=—5℃;当室外架空敷 设时,t 1应取冬季采暖室外计算温度; L ——计算管段的长度(m)。 不同材质管材的。值见表2—1。 表2—1不同材质管材的线膨胀系数 ()L t t L 2161012-?=?- 式中12×10—6 ——常用钢管的线膨胀系数(1/)。 根据式(2—2)制成管道的热伸长量△L 表(见表2—2),由表中可直接查出不同温度下相应管长的热伸长量。 例有一段室内热水采暖碳素钢管道,管长70m ,输送热水温度为95℃,试计算此段管道的热伸长量。 解根据钢管的热膨胀伸长量计算式(2—2) △L=12×10—6 (t 1—t 2)L =12×10—6 (95+5)×70 =0.084m 由已知管长及送水温度,直接查表2—2,也可得管道的热伸长量△L 。 如果管道中通过介质的温度低于环境温度,则计算出来的是缩短量。
更多同步带轮选型表点击百度文库文档作者 “zuolihong ”查看 HTD3M 同步带轮 HTD3M 同步带轮一般由45#钢、铝合金、铸铁、铸铝、黄铜等材料制造。内孔有圆、D 形孔、锥形孔等形式。表面处理有本色氧化,发黑,镀锌,镀彩锌,高频淬火等处理。 HTD3M 同步带轮特点 1、传动准确,工作时无滑动,具有恒定的传动比; 2、传动平稳,具有缓冲、减振能力,噪声低; 3、传动效率高,可达0.98,节能效果明显; 4、维护保养方便,不需润滑,维护费用低; 5、速比范围大,一般可达10,线速度可达50m/s ,具有较大的功率传递范围,可达几瓦到几百千瓦; 6、可用于长距离传动,中心距可达10m 以上; 7、无污染,可在不允许有污染和工作环境较为恶劣的场所下正常工作。 HTD3M 圆弧齿同步带轮标准配备同步带宽6mm 规格 齿数 形状 节径外径 W L 1K X 轮毂直径内孔透孔外径档边外径档边内径 档边型号3M 10 C/A 9.558.79 11 19 7 -- 3 - 13 6 F-1013063M 11 C/A 10.509.74 11 19 7 -- 3 - 14 7 F-1014073M 12 C/A 11.4610.70 11 19 7 -- 3 - 14 7 F-1014073M 14 C/A 13.3712.61 11 19 7 -- 4 - 13 9.5 F-1016953M 15 C/A 14.3213.56 11 19 7 -- 4 - 18 11 F-1018113M 16 C/A 15.2814.52 11 19 7 -10 4 - 18 11 F-1018113M 18 C/A 17.1916.43 11 19 7 -10 5 - 23 12 F-1023123M 19 C/A 18.1417.38 11 19 7 -10 5 - 25 13 F-1025133M 20 C/A 19.1018.34 11 19 7 -10 5 - 25 14 F-1025143M 21 A/B 20.0519.29 11 19 7 -11 5 - 25 14 F-1025143M 22 A/B 21.0120.25 11 19 7 -11 6 - 25 14 F-1025143M 24 A/B 22.9222.16 11 19 7 -14 6 - 28 18 F-1028183M 25 A/B 23.8723.11 11 19 7 -14 6 - 28 18 F-1028183M 26 A/B 24.8324.07 11 19 7 -15 6 - 28 18 F-1028183M 28 A/B 26.7425.98 11 19 7 -17 6 - 31 20 F-103120
伸缩器技术说明 Dismounting Ring 针对给排水系统、供气系统和污水处理工程,SUFA为全球客户提供全系列、各类型的阀门产品,同时根据要求提供定制的全套流体控制解决方案。SUFA以其优越的阀门品质和全方位的服务赢得了至高无尚的荣誉和业界一致的赞许。 SUFA系列伸缩器采用德国先进的生产制造技术,符合中 国GB标准。具有结构简单,密封性能可靠,体积小,重量轻, 安装拆卸方便,重复利用率高,适用于任何介质的管路。更重 要的是:具有补偿管道一定范围内二管子连接的位移、错位、 挠曲等优点、同时可以省去管路中造价昂贵的补偿器。该产品 秉承了德国精细制造的特点,是代替法兰盘、补偿器作管道连 接使用最新产品。 1、应用标准: ●设计标准:GB/T12465; ●压力试验标准:DIN3230和GB13927 ●连接法兰标准:DIN2501(符合GB17241.6标准); ●产品卫生标准:DVGW标准(最新德国标准)& GB/T17219; ●紧固件执行标准:GB/T5781; 2、技术规格: ●公称通径:200~2200mm ●公称压力:1.0 MPa 0.6MPa ●壳体试验压力:1.5 MPa 0.9MPa ●密封试验压力:1.1 MPa0.66MPa零泄漏设计 ●介质温度:≤-20~80℃ 3、工作原理: ●松套伸缩接头安装在管道上后,拧紧螺母,弹性密封圈在螺母、压盖的作用下,依靠 相互间的斜度,紧压在管子外围起密封和连接作用。当温度变化时,管子能在接头中间自由地伸缩;当地基下沉或震动偏斜,均能确保密封无泄漏,从而达到自动补偿之目的。 ●管子插入依口径而异,65~130,伸缩量50~130。可挠度最大5°,偏心量3。
竖直同步带及带轮选型计算 竖直方向设计要求:托盘及商品自重20kg (196M,滑块运动1250mn所需时间6s。 1,设计功率P d K A ?P K A 根据工作情况查表取 2,带型选择 根据P d 68.1w和带轮转速n 100r/min查询表格选择5M圆弧带 3,带轮齿数z 及节圆直径d1 根据带速,和安装尺寸允许,z 尽可能选择较大值,通过查表选择 5M带,齿数z=26,节圆直径d i 41.38mm,外圆直径d。40.24mm 4,带速v 5,传动比 主动从动带轮一致,传动比i=1 ,主动轮与从动轮同一个型号 6,初定中心距a0 乙初定带的节线长度L op及其齿数Z p 8,实际中心距 a 9,基准额定功率P0
可查表得F 0 50w 10,带宽b s 11,挡圈的设置 5M 带轮,挡圈最小高度 K=~ R= 挡圈厚度t=~2 挡圈弯曲处直径d w d 。2R 43.24mm 挡圈外径 d f d w 2K 48.24mm 竖直方向同步带轮: 带轮型5M 圆弧齿,节径,齿数26,外径,带轮总宽,挡圈外径,带轮孔10mm 固定方式紧定螺钉(侧边紧定螺钉固定台宽7mm 螺纹孔m3两个成90度) 竖直方向同步带: 带型5M 圆弧带,带宽,节线长度约 3418mm 二,电机输出同步带轮选型计算: 功率,转速,带轮选择与竖直方向相同 1,初定中心距a 。 2,初定带的节线长度L op 及其齿数Z p 3,实际中心距a 电机输出同步带: 带型5M 圆弧带,带宽,节线长度约 426mm 三,水平同步带及带轮选型计算: 水平方向设计要求:滑块行程 1350mm 移动负载20N,滑块运动1350mm 所 需时间 4s 。 10.06mm (基准带宽b so 9时) b s
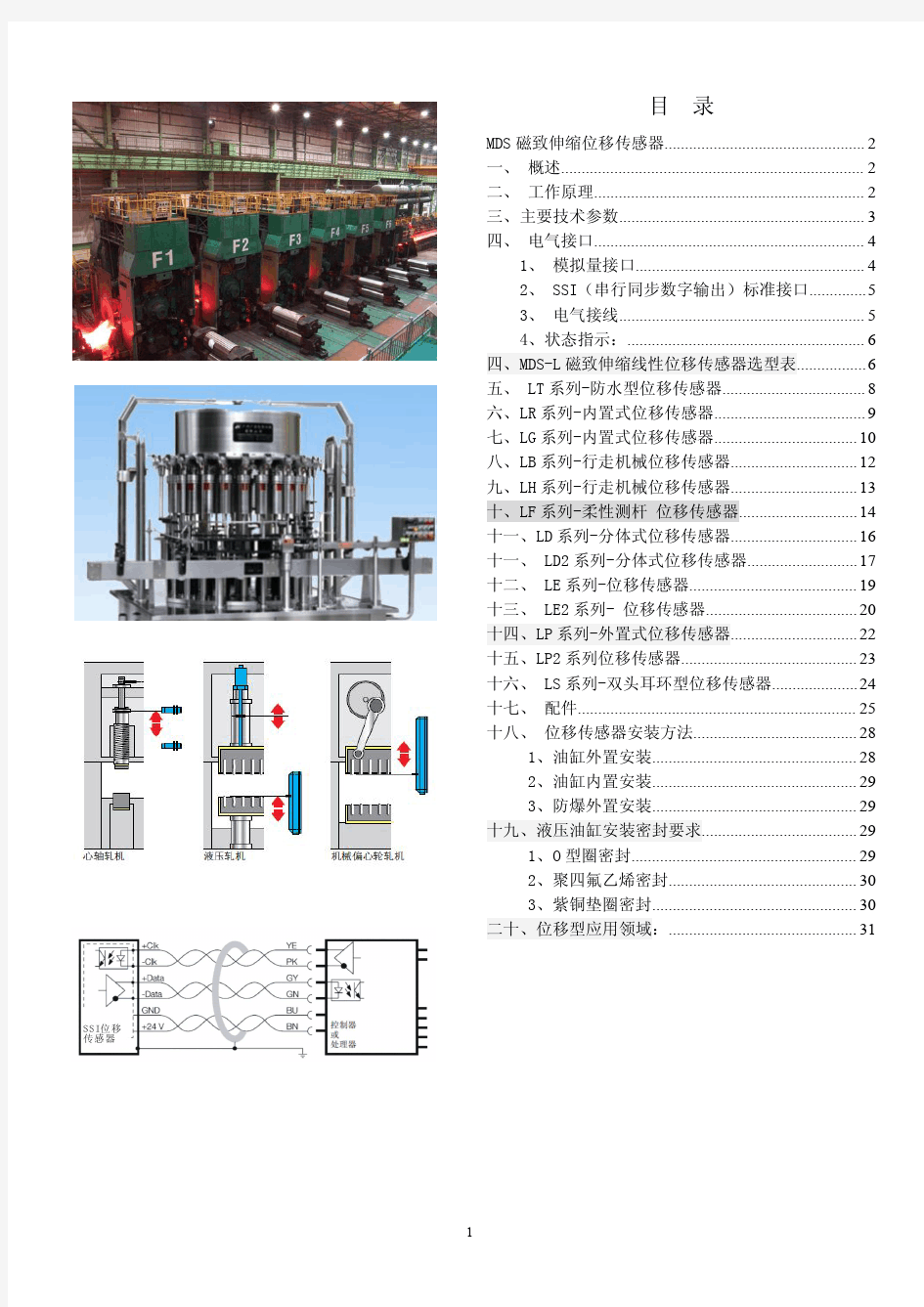
磁致伸缩位移传感器 一、概述磁致伸缩位移(液位)传感器,通过内部非接触式的测控技术精 确地检测活动磁环的绝对位置来测量被检测产品的实际位移值的;该传感器的高精度和高可靠性已被广泛应用于成千上万的实际案例中。 由于作为确定位置的活动磁环和敏感元件并无直接接触,因此传感器可应用在极恶劣的工业环境中,不易受油渍、溶液、尘埃或其它污染的影响。此外,传感器采用了高科技材料和先进的电子处理技术,因而它能应用在高温、高压和高振荡的环境中。传感器输出信号为绝对位移值,即使电源中断、重接,数据也不会丢失,更无须重新归零。由于敏感元件是非接触的,就算不断重复检测,也不会对传感器造成任何磨损, 可以大大地提高检测的可靠性和使用寿命。 二、工作原理 磁致伸缩位移(液位)传感器,是利用磁致伸缩原理、通过两个不同磁场相交产生一个应变脉冲信号来准确地测量位置的。测量元件是一根波导管,波导管内的敏感元件由特殊的磁致伸缩材料制成的。测量过程是由传感器的电子室内产生电流脉冲,该电流脉冲在波导管内传输,从而在波导管外产生一个圆周磁场,当该磁场和套在波导管上作为位置变化的活动磁环产生的磁场相交时,由于磁致伸缩的作用,波导管内会产生一个应变机械波脉冲信号,这个应变机械波脉冲信号以固定的声音速度传输,并很快被电子室所检测到。 由于这个应变机械波脉冲信号在波导管内的传输时间和活动磁环与电子室之间的距离成正比,通过测量时间,就可以高度精确地确定这个距离。由于输出信号是一个真正的绝对值,而不是比例的或放大处理的信号,所以不存在信号漂移或变值的情况更无需定期重标。 三、产品特点及应用领域 产品特点 *内部非接触式测量 *性能价格比高 *多种输出方式可供选择 *防浪涌、防射频干扰
管道伸缩节使用说明书 (VSSJA-2双法兰限位伸缩器)
目录 一、概述……………………………………………… 二、用途及特点……………………………………… 三、主要技术参数…………………………………… 四、基本结构及工作原理…………………………… 五、阀门的安装连接………………………………… 六、试验、运行、调试及维护……………………… 七、故障分析及排除方法……………………………
一、概述: 该系列B2F型(又名VSSJA-2)管道伸缩节是我公司在吸收国内外先进技术的基础上研制开发的新型管路伸缩节,该系列伸缩节设计新颖合理、结构简单紧凑、密封性能好、装卸方便,伸缩限位牢固可靠,使用寿命长。 二、用途及特点: 本系列管路伸缩节,可广泛适用于石化、冶金、电站、给排水系统、煤气等系统上作管道附件连接,便于管道拆装维修。 其特点是: 1.该系列产品设计结构合理、简单紧凑、密封性能可靠,不受空间位置的 影响,可在管道上任意安装。 2.在原有管路松套式伸缩接头的基础上增设了伸缩限位机构,在最大伸缩 量处用螺母锁定,只要不卸掉螺母,伸缩管就不会拉脱。 3.该产品能够吸收允许范围内的管道轴向位移和承受管道内的压力形成 的推力。 三、主要技术参数:管路伸缩节主要技术参数、性能规范表
四、基本结构及工作原理: 1、基本结构:管路伸缩节由主体、压盘、伸缩管、密封圈、防脱机构、螺 栓、螺母等主要零部件组成。 主要零件材料: 2、该管路伸缩节的工作原理是:安装在管道上后,拧紧压盘螺栓,使压盘 压紧密封圈,从而使密封圈紧压在伸缩管的外围起密封作用。安装时其限位螺栓应松开,出厂位置安装,即可实现一定的伸缩量。
磁致伸缩位移传感器研究报告 概述 磁致伸缩位移(液位)传感器,通过内部非接触式的测控技术精确地检测活动磁环的绝对位置来测量被检测产品的实际位移值的;该传感器的高精度和高可靠性已被广泛应用于成千上万的实际案例中。 由于作为确定位置的活动磁环和敏感元件并无直接接触,因此传感器可应用在极恶劣的工业环境中,不易受油渍、溶液、尘埃或其它污染的影响。此外,传感器采用了高科技材料和先进的电子处理技术,因而它能应用在高温、高压和高振荡的环境中。传感器输出信号为绝对位移值,即使电源中断、重接,数据也不会丢失,更无须重新归零。由于敏感元件是非接触的,就算不断重复检测,也不会对传感器造成任何磨损,可以大大地提高检测的可靠性和使用寿命。 工作原理 磁致伸缩位移(液位)传感器,是利用磁致伸缩原理、通过两个不同磁场相交产生一个应变脉冲信号来准确地测量位置的。测量元件是一根波导管,波导管内的敏感元件由特殊的磁致伸缩材料制成的。测量过程是由传感器的电子室内产生电流脉冲,该电流脉冲在波导管内传输,从而在波导管外产生一个圆周磁场,当该磁场和套在波导管上作为位置变化的活动磁环产生的磁场相交时,由于磁致伸缩的作用,波导管内会产生一个应变机械波脉冲信号,这个应变机械波脉冲信号以固定的声音速度传输,并很快被电子室所检测到。 由于这个应变机械波脉冲信号在波导管内的传输时间和活动磁环与电子室之间的距离成正比,通过测量时间,就可以高度精确地确定这个距离。由于输出信号是一个真正的绝对值,而不是比例的或放大处理的信号,所以不存在信号漂移或变值的情况,更无需定期重标。 技术参数 测量对象:位置、速度(绝对速度),可测量1~2个位置 测量范围:50 mm~8000mm 零点可调范围:100%F.S 输出方式:
查表及定制带轮须知: 1、本公司生产的带轮既为国产化设备的同步带配套,又能代替进口带轮使用。 2、用户定制同步带轮,请提供带轮图纸(图在可不必绘制带轮的齿型尺寸),本公司也可按用户提供的型号,带轮内孔,键槽宽度等尺寸为用户绘制带轮图纸;也可为用户提供测绘带轮等服务。 3、带轮的外径公差、端面跳动量、径向跳动量符合表1、表2、表3规定。 4、各种规格型号的同步带选用带轮齿面宽度须符合表4规定要求。 5、带轮外径、档边尺寸按附表规定选用。 6、附表中没有列出的带轮规格,本公司也可生产。 7、制造带轮用材质以碳素钢为主,如需要也可用铝合金、尼龙等材料加工;带轮外径大与250mm,采用铸铁。 梯形齿同步带轮表示方法圆弧齿同步带轮表示方法西德T型齿同步带轮表示方法 同步带轮的型式 AS型BS型AF型BF型W型 同步带轮节距公差 带轮节距公差(单位:MM) 外径 允许偏差 任意两相邻齿间90o弧内允差 ≤25.400.030.05 >25.40~50.800.030.08 >50.80~101.600.030.1 >101.60~177.800.030.13
>177.80~304.800.030.15 >304.80~508.000.030.18 >508.000.030.2 同步带轮外径公差(表1) 带轮外径公差(单位:MM)表1 带轮外径公差 ≤25.40+0.05/0 ≤25.40~50.80+0.08/0 ≤50.80~101.60+0.1/0 ≤101.60~177.80+0.13/0 ≤177.80~304.80+0.15/0 ≤304.80~508.00+0.2/0 >508.00+0.2/0 同步带轮端面允许跳动量公差(表2) 带轮端面允许跳动量公差(单位:MM)表2 带轮外径允许跳动量 ≤101.600.1 >101.60~254.00带轮外径x0.001 >254.000.25+[(带轮外径-254.00)x0.005] ≤203.20300.13 >1203.200.13+[(带轮外径-203.20)x0.005] 同步带轮直边齿形尺寸和公差 带轮直边齿型尺寸和公差(单位:MM) 节 线代号bw h g + 1 . 5 r b r t 2δ M XL 0.84 ±0.0 5 . 6 9 2 0. 3 5 . 1 3 0.508 XX 1.14020.00.508
同步轮同步带的选型方法 同步轮的作用 为确保机械系统的传动精度和工作稳定性,通常对机电一体化系统提出以下要求: (1)高精度 精度直接影响产品的质量,尤其是机电一体化产品,其技术性能、工艺水平和功能比普通的机械产品都有很大的提高,因此机电一体化机械系统的高精度是其首要的要求。 (2) 快速响应性 即要求机械系统从接到指令到开始执行指令指定的任务之间的时间间隔短,这样控制系统才能及时根据机械系统的运行状态信息,下达指令,使其准确地完成任务。 (3) 良好的稳定性 即要求机械系统的工作性能不受外界环境的影响,抗干扰能力强。 同步带是一种兼有链、齿轮、三角胶带优点的传动零件。由于同步带是一种兼有链、齿轮、三角胶带优点的传动零件 1按用途分 一般工业用同步带传动 即梯形齿同步带传动。它主要用于中、小功率的同步带传动,如各种仪器、计算机、轻工机械中均采用这种同步带传动。 高转矩同步带传动 又称HTD带(High Torque Drive)或STPD带传动(Super Torque Positive Drive)。由于其齿形呈圆弧状(图6-2),在我国通称为圆弧齿同步带传动。它主要用于重型机械的传动中,如运输机械(飞机、汽车)、石油机械和机床、发电机等的传动。
常用的同步轮 可分为AT5、AT10、T5、XH、H、L、XL、3M、5M、8M、S5M、S8M等开口、接驳同步带。广泛应用于各种行业,如陶瓷、食品、石材、烟草、木工、印刷、纺织包装等 同步带传动的优点 (1).工作时无滑动,有准确的传动 (2).传动效率高,节能效果好 (3).传动比范围大,结构紧凑 (4).维护保养方便,运转费用低 (5).恶劣环境条件下仍能正常工作 四.同步轮的选型步骤 同步带传动机构一般按以下步骤进行计算与选型 (1)设计条件
同步带有梯形齿同步带和圆弧齿同步带两大类,设计也分为梯形齿同步带设计和圆弧齿同步带两种。 一、下面是圆弧齿同步带设计方法: 原始设计资料 1 原动机和工作机类型; 2 每天运转时间; 3 需传递的名义功率P; 4 小带轮转速n1; 5 大带轮转速n2; 6 初定中心距a0; 7 对传动空间的特殊要求。 设计步骤 1 确定设计功率Pd Pd = KAP kW (1) 式中:KA——工作情况系数,见表2。【表2 工作情况系数KA】
2 选择带型 按n1 和Pd,由图1 选择带型。【参考同步带选型网页】 3 计算传动比i i = n1 / n2 (2) 4 确定带轮直径 4.1 确定带轮齿数Z1、Z2 小带轮齿数按Z1≥Zmin 原则确定,Zmin见表3 【参考带轮最小齿数网页】圆弧齿同步带传动小带轮最少齿数zmin
可得。 【查看各种同步带轮参数计算公式】 5选择带的节线长度LP和确定实际中心距a。 5. 1 计算带的初定节线长度L0 L0=2a0+1.57(d2+d1)+ (d2 –d1)2 /4a0 mm (3) 式中:a0——初定中心距,mm,由设计任务给定。 5. 2 选择带的标准节线长度LP LP根据L0从同步带现有模具表中查询【3M同步带5M同步带8M同步带14M同步带】 5. 3确定实际中心距a 中心距近似计算公式为: (4) M=4LP–6.28(d2+d1)mm (5) 中心距精确计算公式见同步带节线长计算【参考同步带节线长计算网页】 6 确定中心距调整下限I和调整上限S 中心距范围为:(a—I)~(a+S)mm。I和S值见表4。 表4 中心距安装量I 和调整量S
伸缩器(补偿器)安装指导 由于输送介质温度的高低或周围环境的影响,管道在安装与运转时温度很高,必然引起管道长度和直径相应的变化,当温度差产生额热应力超过管材的允许压力时,使管子处于随时有损坏或危险状态之下,因此必须在管路上安装一定的装置来使管子有伸缩的余地,这就是为热胀冷缩用的伸缩器。 方形伸缩器安装注意事项: 1、方形伸缩器组对时,应在平台上或平地上拼接。 2、垂直安装时,如输送介质为液体,应在伸缩器的最低点装疏水装置。伸缩器两侧的第一支架宜设在距伸缩器弯头的弯曲起点0.5~1m处,支架的活动支架,不得设导向支架。 3、安装伸缩器为了减少热应力和提高热补偿能力,必须对伸缩器进行预拉伸,输送热介质的管道需冷拉,输送冷介质需冷压。管道的预拉或预压应在两个固定支架之间的管道安装完毕并与固定支架连接牢固以后进行,预拉伸或预压缩的焊口离开伸缩器的起弯点应大于2mm,并应将伸缩器两臂同时拉伸或压缩。 4、管道支段设置伸缩器的最大距离。 5、方形伸缩器的预拉伸。方形伸缩器安装前应进行预拉伸。拉伸的方法,一种是用千斤顶将方形伸缩器顶开,另一种是常用的拉管器法。
在拉伸前,先将两端的固定支架焊牢,伸缩器两端的直管与连接管的末端之间应预留一定的间隙,其间隙值应等于设计补偿量的1/4。然后用拉管器安装在两个待焊的接口上,收紧拉管器螺栓,拉开伸缩器直到管子接口对齐,并把它点焊好方可拆除拉伸器。 波形伸缩器: 波形伸缩器因其强度较弱,补偿能力小,轴向推力大,适用于管径大于150mm以上及压力低于0.6MPa的管道。 波形伸缩器由钢板制成,其外形如下: 波形伸缩器安装注意事项: 1、波形伸缩器安装前应检查其各部尺寸是否符合要求,波形伸缩器表面不得有裂纹、凹凸、轧痕等缺陷。并按设计规定压力,进行水压试验,合格后方可安装。 2、安装时,应注意伸缩器的方向。伸缩器内的衬套外壳焊接的一端,应朝向坡度的上方,以防冷凝水大量流到波形皱折的凹槽中。 3、伸缩器的拉伸和压缩,应在平地上分次逐渐进行,拉伸或压缩应按照施工图规定数值进行,在待接管道上留出伸缩器的位置,再用拉管器将伸缩器拉长或缩短后,与管子连接。 4、水平安装时,每个凸面式伸缩器下端应安装放水位置。
同步带的设计计算 一、同步带概述 同步带介绍 同步带是综合了带传动、链条传动和齿轮传动的优点而发展起来的新塑传动带。它由带齿形的一工作面与齿形带轮的齿槽啮合进行传动,其强力层是由拉伸强度高、伸长小的纤维材料或金属材料组成,以使同步带在传动过程中节线长度基本保持不变,带与带轮之间在传动过程中投有滑动,从而保证主、从动轮间呈无滑差的间步传动。 同步带传动(见图4-1)时,传动比准确,对轴作用力小,结构紧凑,耐油,耐磨性好,抗老化性能好,一般使用温度-20℃―80℃,v<50m/s,P<300kw,i<10,对于要求同步的传动也可用于低速传动。 图4-1 同步带传统 同步带传动是由一根内周表面设有等间距齿形的环行带及具有相应吻合的轮所组成。它综合了带传动、链传动和齿轮传动各自的优点。转动时,通过带齿与轮的齿槽相啮合来传递动力。同步带传动具有准确的传动比,无滑差,可获得恒定的速比,传动平稳,能吸振,噪音小,传动比范围大,一般可达1:10。允许线速度可达50M/S,传递功率从几瓦到百千瓦。传动效率高,一般可达98%,结构紧凑,适宜于多轴传动,不需润滑,无污染,因此可在不允许有污染和工作环境较为恶劣的场所下正常工作。本产品广泛用于纺织、机床、烟草、通讯电缆、轻工、化工、冶金、仪表仪器、食品、矿山、石油、汽车等各行业各种类型的机械传动中。同步带的使用,改变了带传动单纯为摩擦传动的概念,扩展了带传动的范围,从而成为带传动中具有相对独立性的研究对象,给带传动的发展开辟了新的途径。 同步带的特点 (1)、传动准确,工作时无滑动,具有恒定的传动比; (2)、传动平稳,具有缓冲、减振能力,噪声低; (3)、传动效率高,可达,节能效果明显; (4)、维护保养方便,不需润滑,维护费用低; (5)、速比范围大,一般可达10,线速度可达50m/s,具有较大的功率传递范围,可达几瓦到几百千瓦; (6)、可用于长距离传动,中心距可达10m以上。 同步带传动的主要失效形式 在同步带传动中常见的失效形式有如下几种: (1)、同步带的承载绳断裂破坏 同步带在运转过程中承载绳断裂损坏是常见的失效形式。失效原因是带在传递动力过程中,在承载绳作用有过大的拉力,而使承载绳被拉断。此外当选用的主动捞轮直径过小,使承载绳在进入和退出带抡中承受较大的周期性的弯曲疲劳应力作用,也会产生弯曲疲劳折断(见图4-2)。
磁致伸缩位移传感器位移测量研究与实现 李庆山 潘日敏 戴曙光 杨永才 (上海理工大学光学与电子信息工程学院 上海 200093) 摘要 基于磁致伸缩位移传感器的位移测量原理,讨论了位移测量的方法与实现:通过测量发射脉冲与回波脉冲的时间差计算活动磁铁的位置。基于F PG A器件设计了数字移相脉冲计数方式对时间进行精确测量,该方法对于提高测量位移精度,降低测量系统对高频的要求,对提高系统稳定性和抗干扰能力有重要意义。 关键词 磁致伸缩 数字移相 时间测量 F PG A Research and Realization of the Displacement Measurement for Magnetostric-tive Displacement Sensor Li Qing shan Pan Rimin Dai Shuguang Yang Yong cai (College of Op tical and Electr onics I nf or mation Eng ineer ing, Univ er sity of Shanghai f or S cience and T echnology,Shanghai200093,China) Abstract Basing on t he measurement principle of magnetostritive displacement sensor,the method and realiza-tion of displacement measurment are int roduced.M easurement on the interval betw een t rigger impulse and re-turn impulse corresponds t o the position of t he moving magnet.T he precise time int erval measurement with digi-tal phase shift count ing is designed by using FPG A device.T his method can enhance t he systemat ic precision, reduce the syst emat ic demand on high frequency.It has great significance in promot ing syst em st ability and anti-jamming. Key words M agnet ostrict ive Digital phase shif t T ime measurement FPGA 1 引 言 磁致伸缩位移传感器是一种以磁致扭转波为传播媒介的传感器,这种传感器安装简单、方便,能承受高温、高压和高振荡的环境。广泛应用于易爆、易燃、易挥发、有腐蚀的场合,但在国内设计和应用的都比较少。文中基于磁致伸缩位移传感器的原理,阐述了一种可以提高磁致伸缩位移传感器精度的位移测量方法。 2 磁致伸缩位移传感器的原理 磁致伸缩位移传感器(M agnet ostrict ive Posit ion Sensor)如图1所示,主要由波导钢丝1,位置磁铁4,波检测器3和电子系统5组成。位置磁铁通常装在一个运动部件A上,而传感器主体则装在一个固定的部件B上。传感器工作时,电子信号和处理系统5以时间间隔为T1发给磁致波导钢丝1的激励脉冲电流i e 。该脉冲电流将产生一个围绕波导钢丝1的旋转磁场。位置磁铁4也产生一个固定的磁场。在这两个磁场的正交作用下,波导钢丝产生磁致弹性伸缩,形成一个磁致旋转波2。该旋转波沿着波导钢丝以2800m/s的速度向两边传播。当它传到波导钢丝一端的波检测器3时被转换成电信号u a。通过测量磁致旋转波从位置磁铁4传到波检测器3的时间T0就能确定位置磁铁和波检测器之间的距离。这样,当部件A和B产生相对运动,通过磁致旋转波位移传感器就可以确定部件A的位置和速度。 3 位移测量原理和常规方法分析 磁致伸缩位移传感器的位移计算非常简单,将所 第26卷第8期增刊 仪 器 仪 表 学 报 2005年8月
伸缩器的使用方法 什么是伸缩器,在这里就不说了,对于伸缩器的使用方法,大家了解多少呢? 伸缩器的使用方法是将伸缩器的法兰一端与管道上的法兰或阀门管件法兰相连,另一端将管子插入承口内,插入长度应略小于本产品的总长度,可在管子插入端预先划上准备插入长度标线以便准确把握。安装前应先检查调节螺栓是否处于最松驰壮态以及承口内的橡胶密封圈应处于不受挤压状态。插入管子时,可事先在管子上涂抹肥皂水,以减少摩擦,方便插入。管子插入后,应逐渐循环拧紧调节螺栓,以便承口内的橡胶密封圈与管子紧密结合。伸缩器在管道端部使用(即管线末梢端使用),应考虑设置端部支墩,以抵消管道内介质产生的推力。 伸缩器主要是使用波纹补偿器的弹性元件进行有效伸缩变形来吸收导管、管线等来产生尺寸变化的一种补偿元件。我厂生产的伸缩器可主要运用在管道系统的机械位移、加热位移来吸收震动、减小噪音的,它可以向各个方向进行位移吸收。这里简要说明下,对于内套筒的伸缩器我们应该注意内套筒子的方向和介质流动的方向是否一致,然后就是铰链型伸缩器的铰链转动与位移转动的平面是否也一致,另外我们禁止使用变形的伸缩器来调整管道的安装情况,这样会影响伸缩器的正常使用寿命,也会增加管道的负担。 伸缩器的简介 友联公司是专业研制、开发和生产伸缩器,伸缩节,伸缩接头,传力接头,橡胶软接头、橡胶软连接、直埋补偿器、橡胶伸缩器、套管伸缩器等系列的专业企业。今天我们就常用的伸缩器给大家做个简要的介绍。 伸缩器也称伸缩节、膨胀节、补偿器、伸缩接头。伸缩器按材质分为:钢制伸缩器、橡胶伸缩器、不锈钢伸缩器。伸缩器在一定范围内可轴向伸缩,也能在一定的角度内克服管道对接不同轴向而产生的偏移,能极大的方便阀门管道的安装与拆卸,在管道允许伸缩量中可以自由伸缩,一旦越过其最大伸缩量就起到限位,确保管道的安全运行。主要为保障管道安全运行,具有以下作用:补偿吸收管道轴向、横向、角向热变形;吸收设备振动,减少设备振动对管道的影响;吸收地震、地陷对管道的变形量。 公司研发的一系列伸缩器等产品质量过硬,通过国家质量体系认证,得到大批客户的拥护,多年来,我们悉心经营,质量不敢有一刻松懈,我们一心一意为客户着想,让您绝对放心。 伸缩器的主要作用 伸缩器的使用,大家都有所了解了,那么对于伸缩器究竟起什么样的作用,大家又知道吗? 伸缩器的主要作用是保障管道的安全运行,具体表现在以下几方面: 1、补偿吸收管道轴向、横向、角向热变形。 2、吸收设备振动,减少设备振动对管道的影响。 3、吸收地震、地陷对管道的变形量。 4、在一定角度范围内可轴向伸缩,也能在一定的角度内克服管道对接不同轴向而产生的偏移,能极大的方便阀门管道的安装与拆卸在管道允许伸缩量中可以自由伸缩,一旦越过其最大伸缩量就起到限位,确保管道的安全运行。 看来伸缩器的作用是不容忽视的,它所起到的作用可是相当大的。我们在运用过程当中,要认真对待每个安装的细节,确保设备安全运行,每一个小部件对于整个工程的作用都是很大的。 管式伸缩节的结构特点 什么是管式伸缩节呢?所谓管式伸缩节也称注填式套筒补偿器,与套筒补偿器结构相似,对于应用在低温水网的注填式套筒补偿器,只要对内套高光洁度滑动表面加以保护,
甲管伸缩器 产品名称:甲管伸缩器(承盘伸缩器) 产品型号:CPSSQ-10 一、产品特点 该产品一端为法兰,另一端为承口,与传统伸缩器相比,该产品重量轻,性能优,结构新颖,安装简单方便,密封效果好,并且密封强度可根据需要自如调节。 该产品可与塑料管、铸铁管、球墨铸铁管、钢管和阀门、管件等迅速实现连接。 二、优越性能 1、该产品使用非常方便,无论是新安装管道或是对原有管道进行维修均不需现场焊接,也不需打口,只需按照安装方法连接即可,节省人力。 2、产品自带法兰橡胶密封垫及承口橡胶密封圈,可实现施工现场快速连接。 3、承口与管子之间采用橡胶柔性密封,并且可以调节密封强度,使得密封更加安全可靠。 4、产品伸缩补偿量大,其数值见参考数据表中△L。特别是对热膨胀系数较大的塑料管及产生应力较大的管线,最适宜选用该产品。 5、使用多年后导致密封效果减弱时,可再次紧固螺栓增强密封性能。 三、规格(部分) 四、制造规范 法兰连接尺寸符合GB17241.6-1998和GB/T9113-2000要求,适用直管外径符合GB/T10002.1-1996、GB/T13663-2000、GB3420~3422-1982、GB13295-
1991、 GB/T3091~3092-1993标准要求。 型号CPSSQ-10 适用压力≤1.0MPa(10kgf/cm2) 适应温度≤80℃ 适用介质水及其他非腐蚀性介质 名称材料 伸缩器灰铸铁、球墨铸铁 密封垫圈丁腈橡胶 调节螺栓不锈钢 六、安装使用方法: 将本产品的法兰一端与管道上的法兰或阀门管件法兰相连,另一端将管子插入承口内,插入长度应略小于本产品的总长度,可在管子插入端预先划上准备插入长度标线以便准确把握。 1、安装前应先检查调节螺栓是否处于最松驰壮态以及承口内的橡胶密封圈应处于不受挤压状态。 2、插入管子时,可事先在管子上涂抹肥皂水,以减少摩擦,方便插入。 3、管子插入后,应逐渐循环拧紧调节螺栓,以便承口内的橡胶密封圈与管子紧密结合。 4、本产品如在管道端部使用(即管线末梢端使用),应考虑设置端部支墩,以抵消管道内介质产生的推力。 汇通品牌专业制造,本厂严格按照国家标准及相关标准生产膨胀节(补偿器、伸缩器、金属软管)、橡胶软接头、管件(法兰、弯头、人孔、风门、柔性防水套管、刚性防水套管、伸缩接头)、电厂配件(支吊架)四大系列产品,规格齐全。同时可根据用户特殊要求设计制造以上各种非标产品,并由电子程序软件设计校核。本厂采用先进科学的生产工艺,设备配套齐全、检测设备完善可靠,企业规模在迅速发展,产品销往全国28个省的工程项目,并常年出口越南、德国、法国、日本等国家。广泛用于石油、发电、化工、城市供热等工程。
一,竖直同步带及带轮选型计算: 竖直方向设计要求:托盘及商品自重20kg(196N),滑块运动1250mm 所需时间6s 。 1,设计功率 w w s m kg N kg kw Fv P 4.45)(9 .0625.1/8.920)(103=÷??=?=-η 根据工作情况查表取1、5 2,带型选择 根据与带轮转速查询表格选择5M 圆弧带 3,带轮齿数z 及节圆直径 根据带速,与安装尺寸允许,z 尽可能选择较大值,通过查表选择 5M 带,齿数z=26,节圆直径,外圆直径 4,带速v 5,传动比 主动从动带轮一致,传动比i=1,主动轮与从动轮同一个型号 6,初定中心距
7,初定带得节线长度及其齿数 8,实际中心距a 9,基准额定功率 可查表得 10,带宽 (基准带宽时) 11,挡圈得设置 5M带轮,挡圈最小高度K=2、5~3、5 R=1、5 挡圈厚度t=1、5~2挡圈弯曲处直径 挡圈外径 竖直方向同步带轮: 带轮型5M圆弧齿,节径41、38mm,齿数26,外径40、24mm,带轮总宽13、3mm,挡圈外径48、24mm,带轮孔10mm,固定方式紧定螺钉(侧边紧定螺钉固定台宽7mm,螺纹孔m3,两个成90度)
竖直方向同步带: 带型5M圆弧带,带宽10、3mm,节线长度约3418mm 二,电机输出同步带轮选型计算: 功率,转速,带轮选择与竖直方向相同 1,初定中心距 2,初定带得节线长度及其齿数 3,实际中心距a 电机输出同步带: 带型5M圆弧带,带宽10、3mm,节线长度约426mm 三,水平同步带及带轮选型计算: 水平方向设计要求:滑块行程1350mm,移动负载20N,滑块运动1350mm所需时间4s。 1,设计功率
如何对补偿器进行选型 管道补偿器又称为伸缩器或伸缩节、膨胀节, 主要用于补偿管道受温度变化而产生的热胀冷缩。如果温度变化时管道不能完全自由地膨胀或收缩,管道中将产生热应力。在管道设计中必须考虑这种应力, 否则它可能导致管道的破裂, 影响正常生产的进行。作为管道工程的一个重要组成部分,补偿器在保证管道长期正常运行方面发挥着重要的作用。 由于受到各方面的制约是相当复杂的,但是任何复杂的管系都可以选用若干个固定支架在不同的部位选择不同的设置,将其分成若干形状相对简单的单独管段,“Z”型管段和“∏”型管段等,并分别确定各管段的变形及补偿量,由于补偿器的种类很多,正确地选型是非常重要的,因此在管系的总体设计时,应充分地考虑到管线的走向和支撑体系(包括固定管架、导向滑动管架等)的设计和综合考虑
补偿器的造型和配置,以示达到安全、合理、适用、经济的最佳组合。 波纹管补偿器它是以波纹管为核心的挠性元件,在管线上再作轴向、横向和角向三个方向的补偿。轴向型补偿器为了减少介质的自激现象。在产品内部没有内套管,在很大程度上限制了径向补偿能力,故一般仅用以吸收或补偿管道的轴向位移(如果管系中确需少量的径向位移,可以订货时予以说明其径最大位移量):横向位移补偿器(大拉杆)主要吸收垂直于补偿器轴线的横向位移,小拉杆横向位移补偿器适合于吸收横向位移,也可以吸收轴向、角向和任意三个方向位移的组合:铰链补偿器(也称角向补偿器)。它以两上或三个补偿器配套使用(单个使用铰链补偿器没有补偿能力),用以吸收单向平面内的横向变形,万向铰链(角向)补偿器,由两个或三个配套使用,可吸收三维方向的变形量。
WD温度传感器 热电偶、热电阻、变送器 选型样本 温度传感器选型 WENDU CHUANGANQI XUANXING YANGBEN 欢迎拨打移动热线:1360 115 9475 或010-8170 9716垂询或索取资料!
概述: 工业用热电偶作为温度测量,通常用来和显示仪表等 配套使用,以直接测量各种生产过程中从0℃至+1800℃ 范围内的液体、蒸汽和气体介质以及固体表面的温度测量。 技术指标: ★ 测温范围、型号、分度号、精度等见附表 ★ 绝缘电阻:温度为15~35℃\相对湿度≤80% 热电偶的若电极和保护管应为应不小于5M Ω(电压100V), ★ 热电偶的最小插入深度应不小于其保护管直径的8~10倍 ★ 引线可为二线或三线 ★ 响应时间:金属保护管Φ16 t <90s Φ12 t <30s ★ 保护管材料:不锈钢1Cr18Ni9Ti 、探钢20#、高铝质 附表一: 附表二: 单位:mm K :镍铬-镍硅 E :镍铬-康铜 S :铂铑10-铂 B :铂铑30-铂铑6 1、无固定装置式 2、固定螺纹式 3、活动法兰式 4、固定法兰式 5、直角式 6、固定螺纹锥形 2、防溅式 3、防水式 4、防爆式 保护管规格 0、 Φ16mm 不锈钢管 1、 Φ12mm 不锈钢管 2、Φ20mm 不锈钢管 3、Φ16mm 高铝管 4、Φ25mm 高铝管 欢迎拨打移动热线:1360 115 9475或010-8170 9716垂询或索取资料!
概述: 工业用热电阻作为温度测量仪表,通常用来和显示仪表 等配套使用,直接测量各种生产过程中从-200℃~+500℃范 围内的液体、蒸汽和气体介质以及固体表面的温度。 技术指标: ★测温范围、型号、分度号、精度等见附表三 ★ 绝缘电阻:温度为15~35℃\相对湿度≤80% 热电偶的若电极和保护管应为应不小于5M Ω(电压100V), ★ 热电偶的最小插入深度应不小于其保护管直径的8~10倍 ★ 引线可为二线或三线 ★ 响应时间:金属保护管Φ16 t <90s Φ12 t <30s ★ 保护管材料:不锈钢1Cr18Ni9Ti 、探钢20#、高铝质 ★ 防爆标志:dIIbT4 附表三: 选型规格: 温度仪表 热电阻 热电阻材料 铂热电阻 铜热电阻 按装固定形式 无固定装置 固定螺纹 活动法兰 固定法兰 接线盒形式 2防溅式 3防水式 保护管规格 0Φ16不锈钢管 1≤Φ12不锈钢管 欢迎拨打移动热线:1360 115 9475或010-8170 9716垂询或索取资料!
磁致伸缩位移传感器 一、概述 磁致伸缩位移传感器,通过内部非接触式的测控技术精确地检测活动磁环的绝对位置来测量被检测产品的实际位移值的;该传感器的高精度和高可靠性已被广泛应用于成千上万的实际案例中。 由于作为确定位置的活动磁环和敏感元件并无直接接触,因此传感器可应用在极恶劣的工业环境中,不易受油渍、溶液、尘埃或其它污染的影响。此外,传感器采用了高科技材料和先进的电子处理技术,因而它能应用在高温、高压和高振荡的环境中。恒伸传感器输出信号为绝对位移值,即使电源中断、重接,数据也不会丢失,更无须重新归零。由于敏感元件是非接触的,就算不断重复检测,也不会对传感器造成任何磨损,可以大大地提高检测的可靠性和使用寿命。 二、结构材质 测杆结构:刚性测杆结构、外置一体式结构; 测杆材质:不锈钢316、铝型材 测杆耐压:≤34MPa(位移);液位:由所选浮子承压决定 电子仓外壳:铝合金 安装接口:螺纹连接、固定座 出线方式:直出电缆线、航空插头 防护等级:IP65(可根据要求定制IP67 或IP68) 三、产品特点 * 内部非接触式测量 * 性能价格比高 * 多种输出方式可供选择 * 防浪涌、防射频干扰[1] * 不需定期标定和维护 * 安装方便 * 高精度、高稳定性、高可靠性 * 使用寿命长 * 具有输入电源反向极性保护功能 * 结构精巧、环境适应性强 * 隔离防爆型(可选) 四、工作原理 磁致伸缩位移传感器,是利用磁致伸缩原理、通过两个不同磁场相交产生一个应变脉冲信号来准确地测量位置的。测量元件是一根波导管,波导管内的敏感元件由特殊的磁致伸缩材料制成的。测量过程是由传感器的电子室内产生电流脉冲,该电流脉冲在波导管内传输,