
2-2
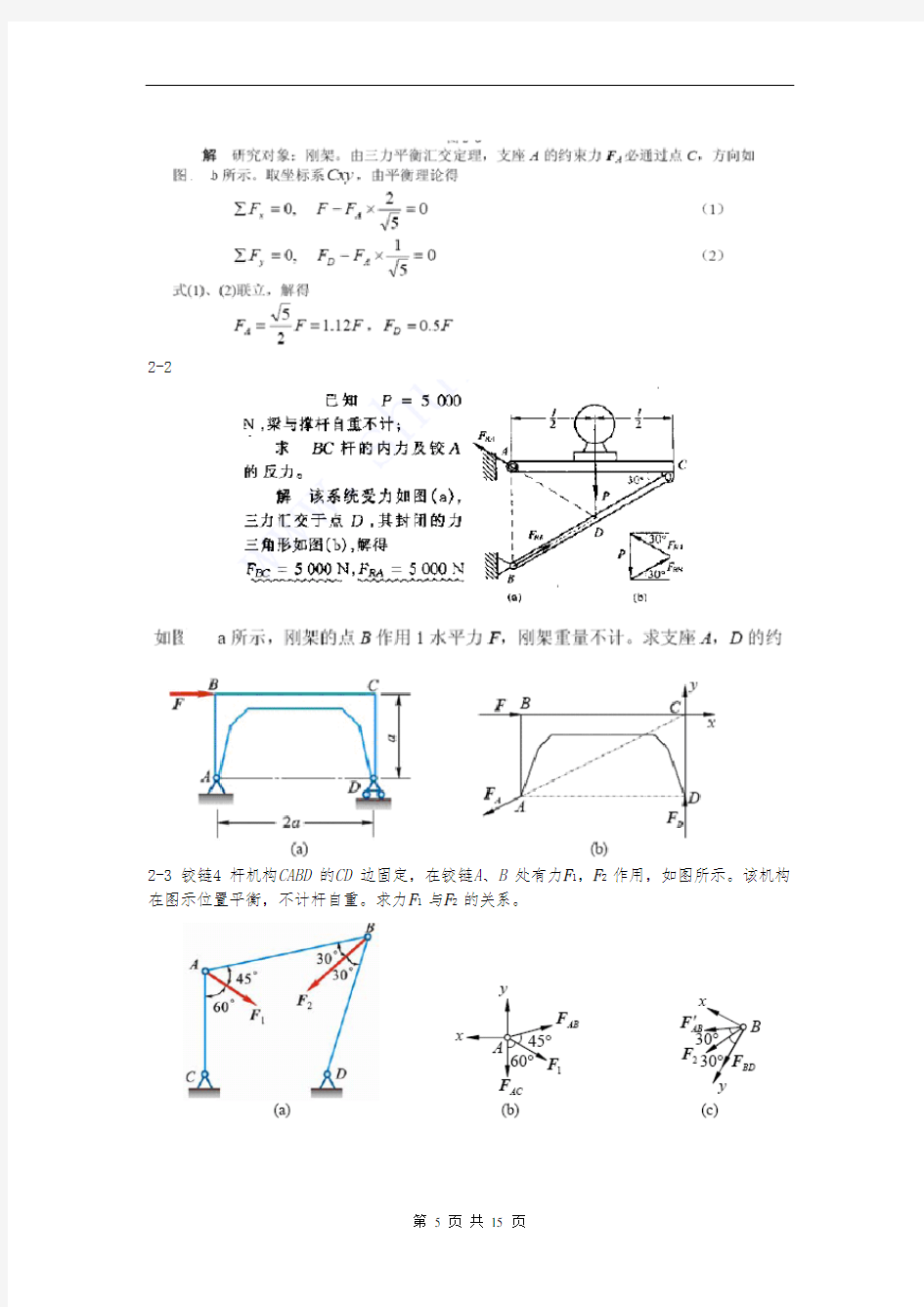
2-3 铰链4 杆机构CABD 的CD 边固定,在铰链A、B 处有力F1,F2 作用,如图所示。该机构在图示位置平衡,不计杆自重。求力F1 与F2 的关系。
2-4
2-5 如图2-10 所示,刚架上作用力F。试分别计算力F 对点A 和B 的力矩。
2-6 已知梁AB 上作用1 力偶,力偶矩为M,梁长为l ,梁重不计。求在图a,b,c 三种情况下支座A 和B 的约束力。
2-7 图所示结构中,各构件自重不计。在构件AB 上作用1 力偶矩为M 的力偶,求支座A 和C 的约束力。
2-8
2-9
2-10
2-11
2-12
2-13
绪论单元测试 1 【多选题】(2分) 下面哪些运动属于机械运动? A. 发热 B. 转动 C. 平衡 D. 变形 2 【多选题】(2分) 理论力学的内容包括:。 A. 动力学 B. 基本变形 C. 运动学 D. 静力学
3 【单选题】(2分) 理论力学的研究对象是:。 A. 数学模型 B. 力学知识 C. 力学定理 D. 力学模型 4 【多选题】(2分) 矢量力学方法(牛顿-欧拉力学)的特点是:。 A. 以变分原理为基础 B. 以牛顿定律为基础 C.
通过力的功(虚功)表达力的作用 D. 通过力的大小、方向和力矩表达力的作用 5 【多选题】(2分) 学习理论力学应注意做到:。 A. 准确地理解基本概念 B. 理论联系实际 C. 熟悉基本定理与公式,并能在正确条件下灵活应用 D. 学会一些处理力学问题的基本方法 第一章测试 1 【单选题】(2分)
如图所示,带有不平行的两个导槽的矩形平板上作用一力偶M,今在槽内插入两个固连于地面的销钉,若不计摩擦,则。 A. 板不可能保持平衡状态 B. 板必保持平衡状态 C. 条件不够,无法判断板平衡与否 D. 在矩M较小时,板可保持平衡 2 【单选题】(2分)
A. 合力 B. 力螺旋 C. 合力偶 3 【单选题】(2分) 关于力系与其平衡方程式,下列的表述中正确的是: A. 在求解空间力系的平衡问题时,最多只能列出三个力矩平衡方程式。 B. 在平面力系的平衡方程式的基本形式中,两个投影轴必须相互垂直。 C. 平面一般力系的平衡方程式可以是三个力矩方程,也可以是三个投影方程。
D. 任何空间力系都具有六个独立的平衡方程式。 E. 平面力系如果平衡,则该力系在任意选取的投影轴上投影的代数和必为零。 4 【单选题】(2分)
第一章静力学公理与受力分析(1) 一.就是非题 1、加减平衡力系公理不但适用于刚体,还适用于变形体。( ) 2、作用于刚体上三个力的作用线汇交于一点,该刚体必处于平衡状态。( ) 3、刚体就是真实物体的一种抽象化的力学模型,在自然界中并不存在。( ) 4、凡就是受两个力作用的刚体都就是二力构件。( ) 5、力就是滑移矢量,力沿其作用线滑移不会改变对物体的作用效果。 ( ) 二.选择题 1、在下述公理、法则、原理中,只适于刚体的有( ) ①二力平衡公理②力的平行四边形法则 ③加减平衡力系公理④力的可传性原理⑤作用与反作用公理 三.画出下列图中指定物体受力图。未画重力的物体不计自重,所有接触处均为光滑接触。整体受力图可在原图上画。 )a(球A )b(杆AB d(杆AB、CD、整体 )c(杆AB、CD、整体) )e(杆AC、CB、整体)f(杆AC、CD、整体
四.画出下列图中指定物体受力图。未画重力的物体不计自重,所有接触处均为光滑接触。多杆件的整体受力图可在原图上画。 )a(球A、球B、整体)b(杆BC、杆AC、整体
第一章静力学公理与受力分析(2) 一.画出下列图中指定物体受力图。未画重力的物体不计自重,所有接触处均为光滑接 触。整体受力图可在原图上画。 W A D B C E Original Figure A D B C E W W F Ax F Ay F B FBD of the entire frame )a(杆AB、BC、整体)b(杆AB 、BC、轮E、整体 )c(杆AB、CD、整体) d(杆BC带铰、杆AC、整体 )e(杆CE、AH、整体)f(杆AD、杆DB、整体
第6章 刚体的平面运动分析 6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0?= 0。试求动齿轮以圆心A 为基点的平面运动方程。 解:?cos )(r R x A += (1) ?sin )(r R y A += (2) α为常数,当t = 0时,0ω=0?= 0 22 1t α?= (3) 起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过 θ??+=A 因动齿轮纯滚,故有? ? =CP CP 0,即 θ?r R = ?θr R = , ??r r R A += (4) 将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为: ??? ? ?? ??? +=+=+=22 2212sin )(2cos )(t r r R t r R y t r R x A A A α?αα 6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。试以杆与铅垂 线的夹角 表示杆的角速度。 解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。则角速度杆AB 为 6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。试问当拖车以速度v 前进时, 轮A 与垫滚B 的角速度A ω与B ω有什么关系?设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。 解:R v R v A A ==ω R v R v B B 22==ω B A ωω2= 6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。设杆BC 在水平位置时,滚子的角速度=12 rad/s ,=30,=60,BC =270mm 。试求该瞬时杆BC 的角速度和点C 的速度。 习题6-1图 A B C v 0 h 习题6-2图 P AB v C A B C v o h 习题6-2解图 习题6-3解图 习题6-3图 v A = v v B = v
理论力学课后习题第二章思考题解答 2.1.答:因均匀物体质量密度处处相等,规则形体的几何中心即为质心,故先找出各规则形体的质心把它们看作质点组,然后求质点组的质心即为整个物体的质心。对被割去的部分,先假定它存在,后以其负质量代入质心公式即可。 2.2.答:物体具有三个对称面已足以确定该物体的规则性,该三平面的交点即为该物体的几何对称中心,又该物体是均匀的,故此点即为质心的位置。 2.3.答:对几个质点组成的质点组,理论上可以求每一质点的运动情况,但由于每一质点受到周围其它各质点的相互作用力都是相互关联的,往往其作用力难以 n3 预先知道;再者,每一质点可列出三个二阶运动微分方程,各个质点组有个相互关联的三个二阶微分方程组,难以解算。但对于二质点组成的质点组,每一质点的运动还是可以解算的。 若质点组不受外力作用,由于每一质点都受到组内其它各质点的作用力,每一质点的合内力不一定等于零,故不能保持静止或匀速直线运动状态。这表明,内力不改变质点组整体的运动,但可改变组内质点间的运动。 2.4.答:把碰撞的二球看作质点组,由于碰撞内力远大于外力,故可以认为外力为零,碰撞前后系统的动量守恒。如果只考虑任一球,碰撞过程中受到另一球的碰撞冲力的作用,动量发生改变。 2.5.答:不矛盾。因人和船组成的系统在人行走前后受到的合外力为零(忽略水对船的阻力),且开船时系统质心的初速度也为零,故人行走前后系统质心相对地面的位置不变。当人向船尾移动时,系统的质量分布改变,质心位置后移,为抵消这种改变,船将向前移动,这是符合质心运动定理的。 2.6.答:碰撞过程中不计外力,碰撞内力不改变系统的总动量,但碰撞内力很大,
9-10 在瓦特行星传动机构中,平衡杆O 1A 绕O 1轴转动,并借连杆AB 带动曲柄OB ;而曲柄OB 活动地装置在O 轴上,如图所示。在O 轴上装有齿轮Ⅰ,齿轮Ⅱ与连杆AB 固连于一体。已知:r 1=r 2=0.33m ,O 1A =0.75m ,AB =1.5m ;又平衡杆的角速度ωO 1=6rad/s 。求当γ=60°且β=90°时,曲柄OB 和齿轮Ⅰ的角速度。 题9-10图 【知识要点】 Ⅰ、Ⅱ两轮运动相关性。 【解题分析】 本题已知平衡杆的角速度,利用两轮边缘切向线速度相等,找出ωAB ,ωOB 之间的关系,从而得到Ⅰ轮运动的相关参数。 【解答】 A 、B 、M 三点的速度分析如图所示,点C 为AB 杆的瞬心,故有 AB A O CA v A A B ??== 21ωω ωω?= ?=A O CD v AB B 12 3 所以 s rad r r v B OB /75.32 1=+= ω s rad r v CM v M AB M /6,1 == ?=I ωω 9-12 图示小型精压机的传动机构,OA =O 1B =r =0.1m ,EB =BD =AD =l =0.4m 。在图示瞬时,OA ⊥AD ,O 1B ⊥ED ,O 1D 在水平位置,OD 和EF 在铅直位置。已知曲柄OA 的转速n =120r/min ,求此时压头F 的速度。
题9-12图 【知识要点】 速度投影定理。 【解题分析】 由速度投影定理找到A 、D 两点速度的关系。再由D 、E 、F 三者关系,求F 速度。 【解答】 速度分析如图,杆ED 与AD 均为平面运动,点P 为杆ED 的速度瞬心,故 v F = v E = v D 由速度投影定理,有A D v v =?θcos 可得 s l l r n r v v A F /30.1602cos 2 2m =+??==πθ 9-16 曲柄OA 以恒定的角速度ω=2rad/s 绕轴O 转动,并借助连杆AB 驱动半径为r 的轮子 在半径为R 的圆弧槽中作无滑动的滚动。设OA =AB =R =2r =1m ,求图示瞬时点B 和点C 的速度与加速度。 题9-16图 【知识要点】 基点法求速度和加速度。 【解题速度】 分别对A 、B 运动分析,列出关于B 点和C 点的基点法加速度合成方程,代入已知数据库联立求解。 【解答】 轮子速度瞬心为P, AB 杆为瞬时平动,有
6章 刚体的平面运动分析 6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0?= 0。试求动齿轮以圆心A 为基点的平面运动方程。 解:?c o s )(r R x A += (1) ?sin )(r R y A += (2) α为常数,当t = 0时,0ω=0?= 0 22 1t α?= (3) 起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过 θ??+=A 因动齿轮纯滚,故有? ? =CP CP 0,即 θ?r R = ?θr R = , ??r r R A += (4) 将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为: ??? ? ?? ??? +=+=+=22 2212sin )(2cos )(t r r R t r R y t r R x A A A α?αα 6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。试以杆与铅垂线的夹角θ 表示杆的角速度。 解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。则角速度杆AB 为 h v AC v AP v AB θθω2 000cos cos === 6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系?设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。 解:R v R v A A == ω R v R v B B 22==ω B A ωω2= 6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。设杆BC 在水平位置时,滚子的角速度ω=12 rad/s ,θ=30?,?=60?,BC =270mm 。试求该瞬时杆BC 的角速度和点C 的速度。 习题6-1图 习题6-2图 习题6-2解图 习题6-3解图 习题6-3图 v A = v v B = v ωA ωB
x y P T F 220 36 O 15 2-?图[习题2-3]动学家估计,食肉动物上颚的作用力P 可达800N ,如图2-15示。试问此时肌肉作用于下巴的力T 、F 是多少? 解: 解: 0=∑x F 036cos 22cos 00=-F T 22cos 36cos F T = 0=∑y F 036sin 22sin 00=-+P F T 80036sin 22sin 22 cos 36cos 000 =+F F )(651.87436 sin 22tan 36cos 800 00N F =+= )(179.76322 cos 36cos 651.87422cos 36cos 0 00N F T ===
18 2-?图 B [习题2-6] 三铰拱受铅垂力P F 作用,如图2-18所示。如拱的重量不计,求A 、B 处支座反力。 解:0=∑x F 0cos 45cos 0=-θB A R R B A R l l l R 22)23()2(22 2 += B A R R 1012 1= B A R R 5 1= 0=∑y F 0sin 45sin 0=-+P B A F R R θ P B A F R l l l R =++ 22)23()2(232 1 P B A F R R =+ 10 32 1
的受力图 轮A P B B F R R =+ ? 10 35 121 P B F R =10 4 P P B F F R 791.04 10 ≈= 31623.010 1)2 3()2(2cos 22≈= += l l l θ 0565.71≈θ P P P A F P F R 354.04 2 41051≈=? = 方向如图所示。 [习题2-10] 如图2-22所示,一履带式起重机,起吊重量kN F P 100=,在图示位置平衡。如不计吊臂AB 自重及滑轮半径和摩擦,求吊臂AB 及揽绳AC 所受的力。 解:轮A 的受力图如图所示。 0=∑x F 030cos 20cos 45cos 000=--P AC AB F T R
第二章力系的简化 2-1.通过A(3,0,0),B(0,4,5)两点(长度单位为米),且由A指向B的力F,在z轴上投影为,对z轴的矩的大小为。 答:F/2;62F/5。 2-2.已知力F的大小,角度φ和θ,以及长方体的边长a,b,c,则力F在轴z和y上的投影:Fz= ;Fy= ;F对轴x的矩 M x(F)= 。 答:Fz=F·sinφ;Fy=-F·cosφ·cosφ;Mx(F)=F(b·sinφ+c·cosφ·cosθ) 图2-40 图2-41 2-3.力F通过A(3,4、0),B(0,4,4)两点(长度单位为米),若F=100N,则该力 在x轴上的投影为,对x轴的矩为。 答:-60N; 2-4.正三棱柱的底面为等腰三角形,已知OA=OB=a,在平面ABED内有沿对角线AE的一个力F,图中α=30°,则此力对各坐标轴之矩为: M x(F)= ;M Y(F)= ;M z(F)= 。 答:M x(F)=0,M y(F)=-Fa/2;M z(F)=6Fa/4 2-5.已知力F的大小为60(N),则力F对x轴的矩为;对z轴的矩为。 答:M x(F)=160 N·cm;M z(F)=100 N·cm
图2-42 图2-43 2-6.试求图示中力F 对O 点的矩。 解:a: M O (F)=F l sin α b: M O (F)=F l sin α c: M O (F)=F(l 1+l 3)sin α+ F l 2cos α d: ()22 21l l F F M o +=αsin 2-7.图示力F=1000N ,求对于z 轴的力矩M z 。 题2-7图 题2-8图 2-8.在图示平面力系中,已知:F 1=10N ,F 2=40N ,F 3=40N ,M=30N ·m 。试求其合力,并画在图上(图中长度单位为米)。 解:将力系向O 点简化 R X =F 2-F 1=30N R V =-F 3=-40N ∴R=50N 主矩:Mo=(F 1+F 2+F 3)·3+M=300N ·m 合力的作用线至O 点的矩离 d=Mo/R=6m 合力的方向:cos (R ,)=,cos (R ,)=-
魏 泳 涛 1.1举例说明由r F r F ?=?21,或者由r F r F ?=?21,不能断定21F F =。 解:若1F 与2F 都与r 垂直,则021=?=?r F r F ,但显然不能断定21F F =; 若1F 与2F 都与r 平行,则021=?=?r F r F ,也不能断定21F F =;
魏 泳 涛 1.2给定力)32(3k j i F ++-=,其作用点的坐标为)6,4,3(---。已知OE 轴上的单位矢量)(3 3k j i e ++=,试求力F 在OE 轴上的投影以及对OE 轴之矩。 解:力F 在OE 轴上的投影 4321)(3 3)32(3=++-=++?++-=?=k j i k j i e F OE F 力F 对坐标原点O 之矩
魏 泳 涛 1.3长方体的长、宽和高分别为cm 8=a 、cm 4=b 、cm 3=h ,力1F 和2F 分别作用于棱角A 和B ,方向如图示,且N 101=F ,N 52=F 。试求1F 在图示各坐标轴上的投影和2F 对各坐标轴之矩。 解:力1F 在坐标轴上的投影
魏 泳 涛 1.4 轴AB 在Ayz 平面内,与铅锤的Az 轴成α角。悬臂CD 垂直地固定在AB 轴上,与Ayz 平面成θ角,如图所示。如在D 点作用铅直向下的力P F 。并设a CD =,h AC =,试求力P F 对A 点之矩及对AB 轴之矩。 解:由于力P F 平行于z 轴,所以,0P P ==y x F F ,P P F F z -=, 0)(P P P =-=y x z yF xF m F )(P F x m 和)(P F y m 只与D 的x 及y 坐标有关。 D 的x 坐标:θsin a ; D 的y 坐标:αθαcos cos sin a h +; P F 对x 轴之矩:)cos cos sin ()(P P αθαa h F m x +-=F ; P F 对y 轴之矩:θsin )(P P a F m y =F ; 所以P F 对点A 之矩为:j F i F F m )()()(P P P y x A m m += 轴AB 的方向向量:)cos (sin k j e αα+= 于是得到P F 对轴AB 之矩:αθsin sin )()(P P P a F m A AB =?=e F m F
《理论力学》第二章作业 习题2-5 解:(1)以D点为研究对象,其上所受力如上图(a)所示:即除了有一铅直向下的拉力F外,沿DB有一拉力7和沿DE有一拉力T E。列平衡方程 F Y 0 T E sin F 0 解之得 T Fctg 800/0.1 8000( N) (2)以B点为研究对象,其上所受力如上图(b)所示:除了有一沿DB拉力T夕卜,沿BA有一铅直向下的拉力T A,沿BC有一拉力T C,且拉力T与D点所受的拉力T大小相等方向相反,即T TT。列平衡方程 F X 0 T T C sin 0 F Y 0 T C COS T A 0 解之得 T A Tctg 8000/0.1 80000( N) 答:绳AB作用于桩上的力约为80000N 习题2-6 解:(1)取构件BC为研究对象,其受力情况如下图(a)所示:由于其主动力仅有一个力偶M,那末B、C处所受的约束力F B、F C必定形成一个阻力偶与之 F X 0 T T E COS 0 3) ,T A
平衡。列平衡方程 r M B (F) 0 M F C l 0 与BC 构件所受的约束力F C 互为作用力与反作用力关系,在D 处有一约束力F D 的 方向向上,在A 处有一约束力F A ,其方向可根据三力汇交定理确定,即与水平 方向成45度角。列平衡方程 F X 0 F A sin 45o F C 所以 F A 迈F C >/2F C V 2 -M - 答:支座A 的约束力为.2-,其方向如上图(b ) 所示 习题2-7 解: (1)取曲柄0A 为研究对象,其受力情况如下图(a )所示:由于其主动力 仅有一个力偶M ,那末O A 处所受的约束力F O 、F BA 必定形成一个阻力偶与之 平衡。列平衡方程 ⑵ 取构件ACD ^研究对象,其受力情况如上图(b )所示:C 处有一约束力F C F
解:如图(a ),应用虚位移原理: F 1 ?術 F 2 ? 8r 2 = 0 书鹵 / 、 8r 1 8r 2 tan P 如图(b ): 8 廿y ; 8 厂乔 8r i 能的任意角度B 下处于平衡时,求 M 1和M 2之间的关系 第12章 虚位移原理及其应用 12-1图示结构由8根无重杆铰接成三个相同的菱形。 试求平衡时, 解:应用解析法,如图(a ),设0D = y A = 2l sin v ; y^ 61 sin v S y A =21 cos :心; 溉=61 COST 心 应用虚位移原理: F 2 S y B - R ? S y A =0 6F 2 —2R =0 ; F i =3F 2 习题12-1图 F 2之值。已知:AC = BC 12-2图示的平面机构中, D 点作用一水平力F t ,求保持机构平衡时主动力 =EC = DE = FC = DF = l 。 解:应用解析法,如图所示: y A =lcos ) ; x D =3lsin v S y A - -l sin^ 心;S x D =3I COS ^ & 应用虚 位移原理: —F 2 ? S y A - F I 8x^0 F 2sin J - 3F t cos ^ - 0 ; F 2 = 3F t cot^ 12-3图示楔形机构处于平衡状态,尖劈角为 小关系 习题12-3 B 和3不计楔块自重与摩擦。求竖向力 F 1与F 2的大 F i F 2| (a ) (b) F i 8i - F 2 12-4图示摇杆机构位于水平面上,已知 OO i = OA 。机构上受到力偶矩 M 1和M 2的作用。机构在可
考研院校航天领域高校排名 神舟十号载人飞船于6月11日17时38分在酒泉卫星发射中心成功发射,飞行乘组由男航天员聂海胜、张晓光和女航天员王亚平组成,聂海胜担任指令长。神十升天,燃起了很多考研学子的航天梦,根据教育部学位中心发布的《2012年学科评估结果》,在“航天宇航科学与技术”领域实力排名的高校情况如下:Top.1 北京航空航天大学 学科整体水平得分 92分 北京航空航天大学,简称“北航”,成立于1952年,由当时的清华大学、北洋大学、厦门大学、四川大学等八所院校的航空系合并组建,是新中国第一所航空航天高等学府,现隶属于工业和信息化部。 航空科学与工程学院 航空学院前身是清华大学航空系,是1952年北航成立时最早的两个系之一,当时称飞机系(设飞机设计和飞机工艺专业),1958年更名为航空工程力学系,1970年更名为五大队,1972年更名为五系,1989年定名为飞行器设计与应用力学系,2003年成立航空科学与工程学院。早期的航空学院荟萃了一批当时国内著名的航空领域的专家,如屠守锷、王德荣、陆士嘉、沈元、王俊奎、吴礼义、张桂联、徐鑫福、徐华舫、何庆芝、伍荣林、史超礼、叶逢培等教授,屠守锷院士是第一任系主任,他们为本院发展奠定了坚实基础。在北航发展史上,航空学院不断输出专业和人才,
先后参与组建七系、三系、十四系、宇航学院、飞行学院、无人机所、土木工程系、交通学院等院系。 Top.2国防科学技术大学学科整体水平得分 88分 国防科技大学是国防部和教育部双重领导下的国家重点综合性大学,列入国家“985工程”和“211工程”的重点建设。学校的前身是1953年创建于黑龙江省哈尔滨市的军事工程学院,简称“哈军工”。 航天与材料工程学院 航天与材料工程学院前身是哈尔滨军事工程学院下设的导弹工程系,创建于1959年。学院以航天和新材料技术为特色,主要从事卫星、导弹等各种飞行器总体设计技术、推进技术、控制和测试发射技术、新材料技术、应用化学技术等方面的高素质人才培养和科学研究工作。 Top.3西北工业大学 学科整体水平得分 87分 西北工业大学坐落于古都西安,是我国唯一一所以同时发展航空、航天、航海工程教育和科学研究为特色,以工理为主,管、文、经、法协调发展的研究型、多科性和开放式的科学技术大学,隶属工业和信息化部。 航空学院 岁月如梭,光阴荏苒,源于1933年的西北工业大学航空学院历经了从初期的交通大学航空门(1935年)、南京大学(原中央大学)航空工程教育(1935年)和浙江大学航空工程教育(1933年),到1952年成立于南京的华东航空学院飞机工程系,再到西迁后的西
解ftff?H?:晦矍*曲<∕jY?il ??Λ!P??∕i的钓痕力耳欝珊iL*G 0??l IlH b陌示.KZVk ??Oy4血平胡那论鬥 式⑴* Cr赚立?解紂 佔2 EF D?Π P = 5 ωo N .棗与撑祎自虫不计7 求BC'内力 的反力D 解该系统曼力如图(訂, 三力匸交于艰D.n?t?ι的力三 角膠如图冷人祥得 FX二5 OOm J‰ 二疔OoOW '?-?β-?ΛR?--?≠^≠?-?Vn? 2-2 在铰链A、B处有力Fi, F2作用,如图所示。该机Fi 与F2的关系。 2-3铰链4杆机构CABD的CD边固定, 构在图示位置平衡,不计杆自重。求力 30 T > ◎ 60o 检 (b) B [T j
已 ?] M?fr? P A ?? ?处于?,杆電 不比 求i )若片= F Ft =巴 角e -? 2)若 P Λ - 300 B = (ΛF? = ? 八5两轮受力分别 如图示■对A fc? SX = 0? F 刚 CEJB60, F F ?≤ I XKg = 0 ΣY 二 O J Fs X ?in60τ - F 屈 s?ι? - P A = I! 对 B 轮育 ΣX ^ 0, Fi l oos? - FX & 8= C ΣY = O l Frl A Sinff T F W SinJ?Γ -Pn = U (1) 四牛封程嬴立求AL 爾 Θ-2CT (2) 把拧-0?F A - 3t)0 N 入方社,联立解筹 P fl =IOON 2-5如图2-10所示,刚架上作用力F 。试分别计算力 F 解 M A (F) = -Fbcosθ M 3 IF) = -Fb cos0 + FosinB = F(OSiιι0-bcos0) 2-6已知梁AB 上作用1力偶,力偶矩为M ,梁长为 I ,梁重不计。求在图a , b , C 三种情 况下支座A 和 B 的约束力。 2-4 解⑴柠点掐坐KAS 力如囲Ib 所示"IQ 平fti j l l ?ffl 品F ∑Λ =0, F (Jf co?15° + F 1cosS0e =0. = *9 2co ? 节点瓦 腿标歴覺力如03 所小* Lil f *j≡?H ∑Λ =0, -F AS cos 30&-ACOS60o ≡0 Λ=-√3F 45=-?- = 1.5<3F 1 F 、: F l - 0.644 对点A 和B 的力矩。
9-10在瓦特行星传动机构中,平衡杆O1A 绕O 1轴转动,并借连杆AB 带动曲柄OB ;而曲 柄OB 活动地装置在O 轴上,如图所示。在O 轴上装有齿轮Ⅰ,齿轮Ⅱ与连杆AB 固连于一 体。已知:r 1=r 2=0.33m ,O 1A =0.75m ,AB =1.5m ;又平衡杆的角速度O1=6rad/s 。求 当=60°且=90°时,曲柄OB 和齿轮Ⅰ的角速度。 题9-10图 【知识要点】Ⅰ、Ⅱ两轮运动相关性。 【解题分析】本题已知平衡杆的角速度,利用两轮边缘切向线速度相等,找出ωAB ,ωOB 之间的关系,从而得到Ⅰ轮运动的相关参数。 【解答】 A 、 B 、M 三点的速度分析如图所示,点 C 为AB 杆的瞬心,故有 v A O 1 AB2 CA A AB 3 v B CDABO 1 2 A v B 所以OB3.75rad/s rr 12 v M v M CM,6rad/ AB r 1 s 9-12图示小型精压机的传动机构,OA =O 1B =r =0.1m ,EB =BD =AD =l =0.4m 。在图示 瞬时,OA ⊥AD ,O 1B ⊥ED ,O1D 在水平位置,OD 和EF 在铅直位置。已知曲柄OA 的转速 n =120r/min ,求此时压头F 的速度。
题9-12图 【知识要点】速度投影定理。 【解题分析】由速度投影定理找到A、D两点速度的关系。再由D、E、F三者关系,求F 速度。 【解答】速度分析如图,杆ED与AD均为平面运动,点P为杆ED的速度瞬心,故v F=v E=v D 由速度投影定理,有v D cosv A 22vr2nrl A 可得v F1.30/s m cos60l 9-16曲柄OA以恒定的角速度=2rad/s绕轴O转动,并借助连杆AB驱动半径为r的轮子在半径为R的圆弧槽中作无滑动的滚动。设OA=AB=R=2r=1m,求图示瞬时点B和点C 的速度与加速度。 题9-16图 【知识要点】基点法求速度和加速度。 【解题速度】分别对A、B运动分析,列出关于B点和C点的基点法加速度合成方程,代入已知数据库联立求解。 【解答】轮子速度瞬心为P,AB杆为瞬时平动,有
第一章静力学公理和物体的受力分析 一、是非判断题 1.1.1 在任何情况下,体内任意两点距离保持不变的物体称为刚体。 ( ∨ ) 1.1.2 物体在两个力作用下平衡的必要与充分条件是这两个力大小相等、方向相反,沿同一直线。( × ) 1.1.3 加减平衡力系公理不但适用于刚体,而且也适用于变形体。 ( × ) 1.1.4 力的可传性只适用于刚体,不适用于变形体。 ( ∨ ) 1.1.5 两点受力的构件都是二力杆。 ( × ) 1.1.6只要作用于刚体上的三个力汇交于一点,该刚体一定平衡。 ( × ) 1.1.7力的平行四边形法则只适用于刚体。 ( × ) 1.1.8 凡矢量都可以应用平行四边形法则合成。 ( ∨ ) 1.1.9 只要物体平衡,都能应用加减平衡力系公理。 ( × ) 1.1.10 凡是平衡力系,它的作用效果都等于零。 ( × ) 1.1.11 合力总是比分力大。 ( × ) 1.1.12只要两个力大小相等,方向相同,则它们对物体的作用效果相同。 ( × ) 1.1.13若物体相对于地面保持静止或匀速直线运动状态,则物体处于平衡。 ( ∨ ) 1.1.14当软绳受两个等值反向的压力时,可以平衡。 ( × ) 1.1.15静力学公理中,二力平衡公理和加减平衡力系公理适用于刚体。 ( ∨ ) 1.1.16静力学公理中,作用力与反作用力公理和力的平行四边形公理适用于任何物体。 ( ∨ ) 1.1.17 凡是两端用铰链连接的直杆都是二力杆。 ( × ) 1.1.18 如图所示三铰拱,受力F ,F1作用,其中F作用于铰C的销子上,则AC、BC构件都不是二力构件。 ( × )
第一章 习题4-1.求图示平面力系的合成结果,长度单位为m。 解:(1) 取O点为简化中心,求平面力系的主矢: 求平面力系对O点的主矩: (2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。 习题4-3.求下列各图中平行分布力的合力和对于A点之矩。 解:(1) 平行力系对A点的矩是:
取B点为简化中心,平行力系的主矢是: 平行力系对B点的主矩是: 向B点简化的结果是一个力R B和一个力偶M B,且: 如图所示; 将R B向下平移一段距离d,使满足: 最后简化为一个力R,大小等于R B。其几何意义是:R的大小等于载荷分布的矩形面积,作用点通过矩形的形心。 (2) 取A点为简化中心,平行力系的主矢是: 平行力系对A点的主矩是: 向A点简化的结果是一个力R A和一个力偶M A,且:
如图所示; 将R A向右平移一段距离d,使满足: 最后简化为一个力R,大小等于R A。其几何意义是:R的大小等于载荷分布的 三角形面积,作用点通过三角形的形心。 习题4-4.求下列各梁和刚架的支座反力,长度单位为m。 解:(1) 研究AB杆,受力分析,画受力图: 列平衡方程:
解方程组: 反力的实际方向如图示。 校核: 结果正确。 (2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图: 列平衡方程: 解方程组: 反力的实际方向如图示。校核: 结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图: 列平衡方程: 解方程组: 反力的实际方向如图示。 校核: 结果正确。 习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。 解:(1) 研究整体,受力分析(BC是二力杆),画受力图:
(b) 第4章 运动分析基础 4-1 小环A 套在光滑的钢丝圈上运动,钢丝圈半径为R (如图所示)。已知小环的初速度为v 0,并且在运动过程中小环的速度和加速度成定角θ,且 0 < θ <2 π,试确定小环 A 的运动规律。 解:R v a a 2n sin ==θ,θsin 2 R v a = θθtan cos d d 2 t R v a t v a ===,??=t v v t R v v 02d tan 1d 0θ t v R R v t s v 00tan tan d d -==θθ ??-=t s t t v R R v s 0000d tan tan d θθ t v R R R s 0tan tan ln tan -=θθθ 4-2 已知运动方程如下,试画出轨迹曲线、不同瞬时点的 1.?? ???-=-=225.1324t t y t t x , 2.???==t y t x 2cos 2sin 3 解:1.由已知得 3x = 4y (1) ???-=-=t y t x 3344 t v 55-= ? ??-=-=34y x 5-=a 为匀减速直线运动,轨迹如图(a ),其v 、a 图像从略。 2.由已知,得 2 arccos 213arcsin y x = 化简得轨迹方程:2 9 4 2x y -= (2) 轨迹如图(b ),其v 、a 图像从略。 4-3 点作圆周运动,孤坐标的原点在O 点,顺钟向为孤坐标的正方向,运动方程为 22 1Rt s π= ,式中s 以厘米计,t 以秒计。轨迹图形和直角坐标的关系如右图所示。当点第一 次到达y 坐标值最大的位置时,求点的加速度在x 和y 轴上的投影。 解:Rt s v π== ,R v a π== t ,222 n Rt R v a π== y 坐标值最大的位置时:R Rt s 2 2 1 2π π= = ,12 =∴t R a a x π==t ,R a y 2 π-= 4-4 滑块A ,用绳索牵引沿水平导轨滑动,绳的另一端绕在半径为r 的鼓轮上,鼓轮以匀角速度ω转动,如图所示。试求滑块的速度随距离x 的变化规律。 A 习题4-1图 习题4-2图 习题4-3图
静力学习题及解答—静力学基础
第 1 周习题为 1.2~1.9; 1.10~1.12 为选作。 1.1 举例说明由 F1 ? r = F2 ? r ,或者由 F1 × r = F2 × r ,不能断定 F1 = F2 。 解:若 F1 与 F2 都与 r 垂直,则 F1 ? r = F2 ? r = 0 ,但显然不能断定 F1 = F2 ; 若 F1 与 F2 都与 r 平行,则 F1 × r = F2 × r = 0 ,也不能断定 F1 = F2 ;
四川大学 建筑与环境学院 力学科学与工程系 魏泳涛
静力学习题及解答—静力学基础
1.2 给定力 F = 3 (? i + 2 j + 3k ) ,其作用点的坐标为 (?3,?4,?6) 。已知 OE 轴上的 单位矢量 e =
3 (i + j + k ) ,试求力 F 在 OE 轴上的投影以及对 OE 轴之矩。 3 解:力 F 在 OE 轴上的投影
FOE = F ? e = 3 (?i + 2 j + 3k ) ?
3 (i + j + k ) = ?1 + 2 + 3 = 4 3
力 F 对坐标原点 O 之矩 i j k mO ( F ) = ? 3 ? 4 ? 6 = 3 (15 j ? 10k ) ? 3 2 3 3 3 根据力系关系定理,力 F 对 OE 轴之矩
mOE ( F ) = mO ( F ) ? e = 3 (15 j ? 10k ) ? 3 (i + j + k ) = 15 ? 10 = 5 3
四川大学 建筑与环境学院 力学科学与工程系 魏泳涛
[习题6-2] 半圆形凸轮以匀速s mm v /10=沿水平方向向左运动,活塞杆AB 长l 沿铅直方向运动。当运动开始时,活塞杆A 端在凸轮的最高点上。如凸轮的半径mm R 80=,求活塞B 的运动方程和速度方程. 解:活塞杆AB 作竖向平动。以凸轮圆心为坐标原点,铅垂向上方向为x 轴的正向,则由图中的几何关系可知,任一时刻,B 点的坐标,即活塞B 的运动方程为: )(64)()(cos 2222 2cm t l vt R l R vt R R l R l x B -+=-+=-?+=+=? 活塞B 的速度方程为: )/(646422122s cm t t t t dt dx v B B --=--== [习题6-4] 点M 以匀速率u 在直管OA 内运动,直管OA 又按t ω?=规律绕O 转动。当0=t 时,M 在O 点,求其在任一瞬时的速度及加速度的大小。 解: ut r =,t ω?=。 设任一瞬时,M 点的坐标为),(y x M ,则点M 的运动方程为: t ut r x ω?cos cos ==, t ut r y ω?sin sin ==
速度方程为: t t u t u t ut t u t ut dt d dt dx v x ωωωωωωωsin cos )sin (cos )cos (-=?-+=== t t t u t t u t u v x ωωωωωωcos sin 2sin )(cos 222222 ?-+= t t u t u t ut t u t ut dt d dt dy v y ωωωωωωωcos sin cos sin )sin (+=??+=== t t t u t t u t u v y ωωωωωωc o s s i n 2c o s )(s i n 2222 22?++= 22 2 2)(t u u v v y x ω+=+ 任一瞬时,速度的大小为: 2222 2)(1)(t u t u u v v v y x ωω+=+=+= 加速度方程为: ) sin cos (t t u t u dt d dt dv a x x ωωω-== ]c o s s i n [)s i n (ωωωωωωω??+?-?-?=t t u t u t u t t u t u ωωωωc o s s i n 22--= t t t u t t u t u a x ωωωωωωωc o s s i n 4c o s )(s i n 4322222 222?++= )cos sin (t t u t u dt d dt dv a y y ωωω+== ωωωωωωω?-?+?+??=)s i n (c o s [c o s t t u t u t u t t u t u ωωωωsin cos 22?-= t t t u t t u t u a y ωωωωωωωcos sin 4sin )(cos 4322222222 ?-+= 22 2222)(4t u u a a y x ωω+=+ 任一瞬时,速度的大小为: 222222 2)(4)(4t u t u u a a a y x ωωωω+=+=+=
4-7 图示空间构架由三根无重直杆组成,在D 端用球铰链连接,如图所示。A 、B 和C 端 则用球铰链固定在水平地板上。如果挂在D 端的物重P =10kN ,试求铰链A 、B 和C 的反力。 题4-7图 【知识要点】 空间汇交力系的平衡方程。 【解题分析】 空间汇交力系平衡方程的一般形式为三个投影式。 【解答】 受力分析如图所示,可知三杆都是二力杆 ∑∑∑=--+==-==-=015sin 30sin 45sin 30sin 45sin ,0015cos 30cos 45sin 30cos 45sin ,0045cos 45cos ,0000000000000P F F F F F F F F F F F C A A z C B A y B A x + 由上面三个方程联立,解得F A = F B = 26.39kN F C = 33.46kN 4-14 图示电动机以转矩M 通过链条传动将重物P 等速提起,链条与水平线成30?角(直线O 1x 1平行于直线A x )。已知:r =100mm ,R =200mm ,P =10kN ,链条主动边(下边)的拉力为从动边拉力的两倍。轴及轮重不计求支座A 和B 的反力以及链条的拉力。 【知识要点】 空间任意力系的平衡方程。 【解题分析】 此力系在y 方向投影自动满足,所有只有五个独立方程。 【解答】 将大小转轮相连的链条断开后,系统受力如图。 已知链条下边的拉力为上边的拉力的二倍,则F 1 =2F 2 。
题4-14图 由力系平衡可得 ∑∑∑∑∑=+--==+-==--+==--++==+++=030cos )(6001000,0)(0 Pr )(,0)(030030sin )(6001000,0)(0 30sin )(,00 30cos )(,00 2 112021021021F F F F M R F F F M P F F F F M P F F F F F F F F F F Bx z y Bz x Bz Az z Bx Ax x 解方程得 F 1 =10kN, F 2 =5kN, F B z =1.5kN F A z =6kN, F B x =-7.8kN , F A x =-5.2kN 4-18 图示六杆支撑一水平板,在板角处受铅直力F 作用。设板和杆自重不计,求各杆的内力。 【知识要点】 空间任意力系得平衡方程。 【解题分析】 空间任意力系得六个平衡方程刚好求解六根杆内力。 【解答】 以板为研究对象,受力如图所示。 题4-18图