实验三信号的采集及其频率和周期的测量
一、实验目的
1.学习在CVI环境里使用非NI数据采集卡
2.学习用过零法计算被测每周期采样点数
3.学习数据采集卡采样间隔的标定
4.学习计算被测信号的频率和周期
二、实验原理
1.CVI环境里非NI数据采集卡的驱动
1.1NI数据采集卡驱动库的添加
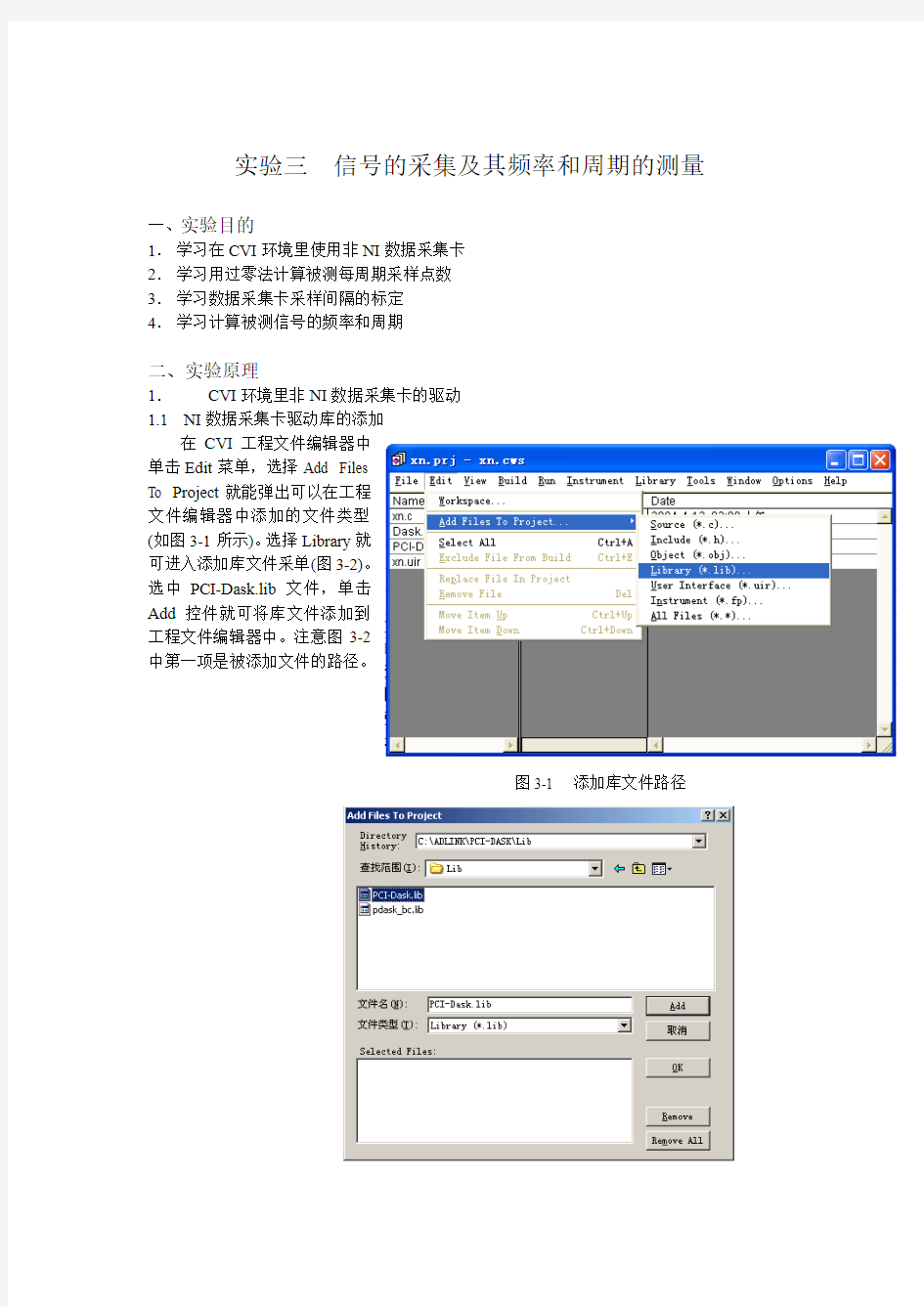
在CVI工程文件编辑器中
单击Edit菜单,选择Add Files
To Project就能弹出可以在工程
文件编辑器中添加的文件类型
(如图3-1所示)。选择Library就
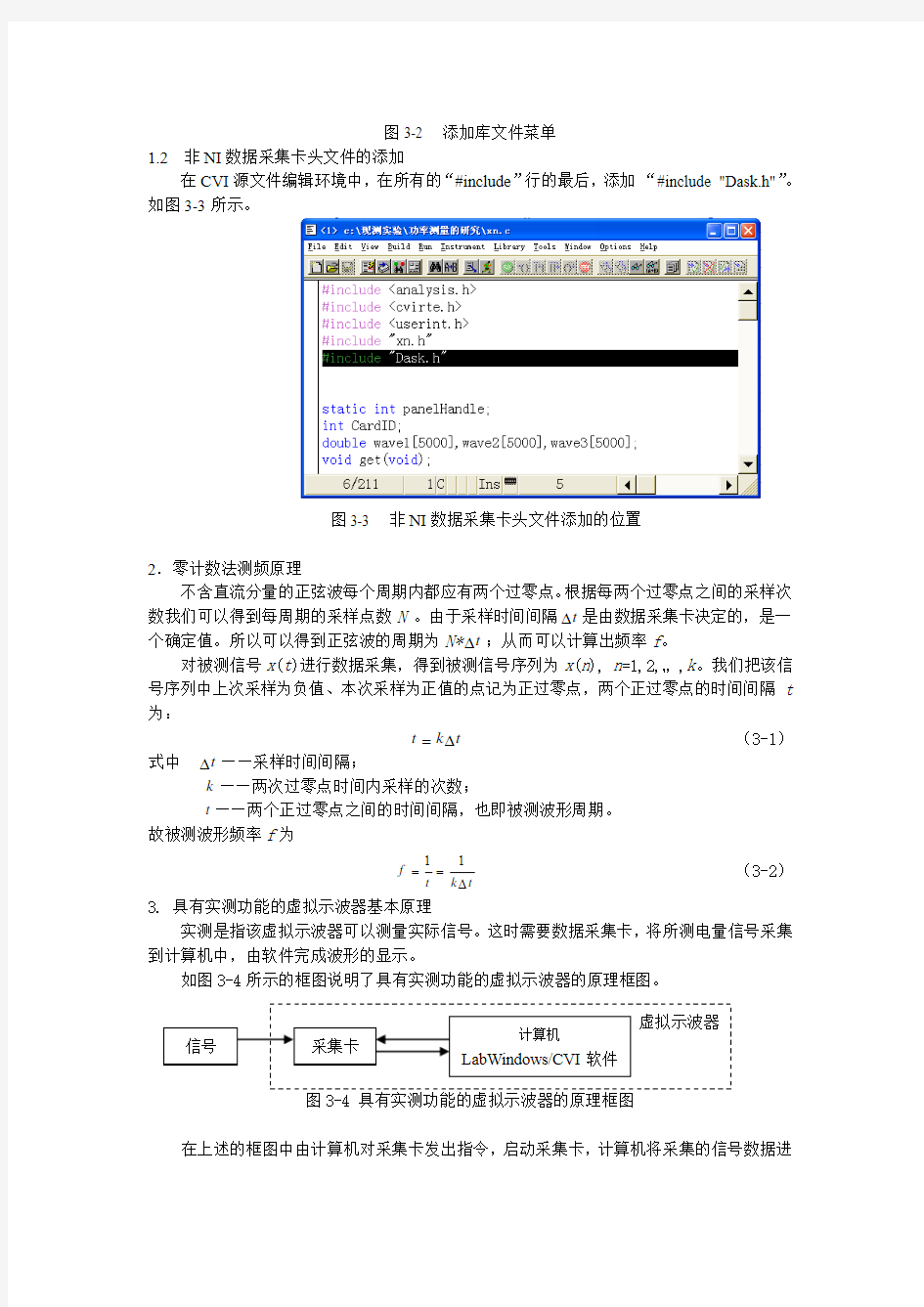
可进入添加库文件采单(图3-2)。
选中PCI-Dask.lib文件,单击
Add控件就可将库文件添加到
工程文件编辑器中。注意图3-2
中第一项是被添加文件的路径。
图3-1 添加库文件路径
图3-2 添加库文件菜单
1.2 非NI 数据采集卡头文件的添加
在CVI 源文件编辑环境中,在所有的“#include ”行的最后,添加 “#include "Dask.h"”。如图3-3所示。
图3-3 非NI 数据采集卡头文件添加的位置
2.零计数法测频原理
不含直流分量的正弦波每个周期内都应有两个过零点。根据每两个过零点之间的采样次数我们可以得到每周期的采样点数N 。由于采样时间间隔t ?是由数据采集卡决定的,是一个确定值。所以可以得到正弦波的周期为N*t ?;从而可以计算出频率f 。
对被测信号x (t )进行数据采集,得到被测信号序列为x (n ), n =1,2,…,k 。我们把该信号序列中上次采样为负值、本次采样为正值的点记为正过零点,两个正过零点的时间间隔t 为:
t k t ?=
(3-1) 式中 t ?——采样时间间隔; k ——两次过零点时间内采样的次数;
t ——两个正过零点之间的时间间隔,也即被测波形周期。 故被测波形频率f 为
t
k t f ?=
=
11 (3-2)
3. 具有实测功能的虚拟示波器基本原理
实测是指该虚拟示波器可以测量实际信号。这时需要数据采集卡,将所测电量信号采集到计算机中,由软件完成波形的显示。
如图3-4所示的框图说明了具有实测功能的虚拟示波器的原理框图。
图3-4 具有实测功能的虚拟示波器的原理框图
在上述的框图中由计算机对采集卡发出指令,启动采集卡,计算机将采集的信号数据进
行存储,处理和显示,从而实现虚拟示波器。
4.PCI_9111数采卡的使用方法
4.1 PCI_9111数采卡性能指标
本节中所使用的数据采集卡的型号为PCI_9111,其性能指标为:
32位PCI数据总数;
16路单端模拟输入通道;
A/D采样速率100KHz;
模拟输入电压范围为±10V、±5V、±2.5V、±1.25V、±0.625V;
3种A/D触发方式:软件触发、外部脉冲出发和可编程定时触发。
使用PCI_9111数据采集卡时,将PCI_9111数据采集卡插入计算机的PCI插槽中,经过37芯排线与一转接板相连,如图5-2所示。被测信号与转接板上相应接线插座相连,转接板上的接线插座对应数采卡的输入通道号。
图3-5 PCI_9111数据采集卡的连接方法
本例中的被测信号是由信号发生器产生的标准正弦波信号。
4.PCI_9111数据采集卡的使用
在使用PCI_9111数采卡时,程序开始时要用Register_Card来初始化数采卡,程序结束时用 Release_Card 释放数采卡。
在主函数里添加以下A/D卡注册程序
CardID=Register_Card(PCI_9111DG,0);
AI_9111_Config (CardID,TRIG_INT_PACER,0,9216);
在需要进行数据采集时添加以下程序:
AI_AsyncDblBufferMode(CardID, 0);
AI_ContReadChannel (CardID, channel, adRange,volt3, ReadCount, SampleRate, SyncMode);
其中的具体参数说明清参考附录3-1。
三、程序设计要求与实验内容
1.程序如下:
#include
#include
#include
#include "e:\实验室\现测实验\PCI—9111采集卡的使用说明\频谱(实验三)\频谱.h"
#include
#include "Dask.h" //c:\ADLINK\PCI-DASK\include\Dask.h
//c:\ADLINK\PCI-DASK\lib\PCI-Dask.lib
#define MAX 2048 //采样点数MAX必须是2n,且大于等于512
static int panelHandle;
static double *Wave; //定义正弦波的数组指针
static double *Mag,*Phase; //定义极值和极值的相角数组指针
short int volt[MAX]={0}; //定义采集后的正弦波的数组
int CardID; //定义采集卡的设备号
double amp=0.0; //定义幅值
int sumpo,channel; //定义每周期点数和通道号
double fre; //定义频率
int main (int argc, char *argv[])
{
if (InitCVIRTE (0, argv, 0) == 0) /* Needed if linking in external compiler; harmless otherwise */
return -1; /* out of memory */
if ((panelHandle = LoadPanel (0, "频谱.uir", PANEL)) < 0)
return -1;
CardID = Register_Card(PCI_9111DG, 0); //采集卡的初始化
AI_9111_Config (CardID, TRIG_INT_PACER,0, 1024); //采集卡的配置
DisplayPanel (panelHandle);
RunUserInterface ();
return 0;
}
int CVICALLBACK GenerateWave (int panel, int control, int event,
void *callbackData, int eventData1, int eventData2)
{ int adRange = AD_B_10_V; //设置采集卡电压范围
double SampleRate=0; //设置采样速率int i,signpo[10]={0},k=1;
switch (event)
{
case EVENT_COMMIT:
GetCtrlVal (panelHandle, PANEL_CHANNEL, &channel); //获得采集卡的通道号
GetCtrlVal (panelHandle, PANEL_RATE, &channel); //获得采集卡的采样速率
AI_AsyncDblBufferMode(CardID, 0); //设置A/D卡的数据缓存
AI_ContReadChannel(CardID,channel,adRange,volt,MAX,SampleRate,1); //单通道采集
DeleteGraphPlot(panelHandle,PANEL_GRAPH,-1,VAL_IMMEDIATE_DRAW);
PlotY (panelHandle, PANEL_GRAPH, volt, MAX, VAL_SHORT_INTEGER,
VAL_THIN_LINE,VAL_EMPTY_SQUARE, VAL_SOLID, 1, VAL_RED);
/*计算频率*/
for(i=1;i { if((volt[i-1]*volt[i]<=0) && volt[i-1]<0) { signpo[k]=i;k++; if(k>8)break; } } sumpo= signpo[k-1]- signpo[1]; fre= SampleRate / sumpo*(k-2); SetCtrlVal (panelHandle, PANEL_FRE, fre); //显示频率 SetCtrlVal (panelHandle, PANEL_SUMPO, sumpo/(k-2)); //显示每周期点数 break; } return 0; } int CVICALLBACK Close (int panel, int control, int event, void *callbackData, int eventData1, int eventData2) { switch (event) { case EVENT_COMMIT: free(Mag); free(Phase); QuitUserInterface (0); break; } return 0; } int CVICALLBACK CalFFT (int panel, int control, int event, void *callbackData, int eventData1, int eventData2) { double *Img; //为虚部定义数组指针 int i; //定义循环变量 switch (event) { case EVENT_COMMIT: Wave=malloc(MAX*sizeof(double)); //为量化后的正弦波动态开辟数组空间 for(i=0;i Wave[i]=volt[i]*20.00/0xffff; DeleteGraphPlot (panelHandle, PANEL_GRAPH, -1,VAL_IMMEDIATE_DRAW); PlotY (panelHandle, PANEL_GRAPH, Wave, MAX, VAL_DOUBLE, VAL_FAT_LINE, VAL_EMPTY_SQUARE, VAL_SOLID, 1, VAL_RED); Img=malloc(MAX*sizeof(double)); //为虚部数组动态开辟空间 for(i=0;i Img[i]=0; //为极值和极值的相角数组动态开辟空间 Mag=malloc(MAX*sizeof(double)); Phase=malloc(MAX*sizeof(double)); FFT (Wave, Img, sumpo); //进行频谱变换 ToPolar1D (Wave, Img, sumpo, Mag, Phase); //进行极坐标转换 for(i=0;i Mag[i]=Mag[i]/(sumpo/2); DeleteGraphPlot (panelHandle, PANEL_GRAPH_2, -1, VAL_IMMEDIATE_DRAW); PlotY (panelHandle, PANEL_GRAPH_2, Mag, sumpo, VAL_DOUBLE, VAL_FAT_LINE, VAL_EMPTY_SQUARE, VAL_SOLID, 1, VAL_YELLOW); free(Wave); //释放数组 free(Img); break; } return 0; } 2. 运行检验 四报告要求 1.简述在CVI使用非NI数据采集卡的步骤; 答:(1)在CVI工程文件编辑器中单击Edit菜单,选择Add Files To Project就能弹出可以在工程文件编辑器中添加的文件类型,选中PCI-Dask.lib文件,单击Add控件就可将库文件添加到工程文件编辑器中。 (2)在CVI源文件编辑环境中,在所有的“#include”行的最后,添加“#include "Dask.h"”。 五思考题 1.改变数据采集卡的采样速率,观测“虚拟频率计”的测试结果,分析其原因; 答:测试结果有偏差 2.给出你的“虚拟频率计”测量范围,提出改进方案; 答:我选择: 800HZ——5K HZ 改进方案:取10个点,而且不取整数 六、仪器清单 1、计算机一台 2、数据采集卡一块 2、信号源一台 3、示波器一台 1、水准测量原理 水准测量是利用水准仪提供的水平视线和水准尺来测定地面两点间的高差,并由已知点的高程推算出未知点高程的一种测高方法。 (1)高差测量 高差是指地面两点间的高程之差。高程测量的原理如图2-1-1所示。欲测A、B 两点间高差,可分别在A、B两点竖立水准尺,并在A、B两点间安置水准仪,当水准仪视线水平时,后视A尺读数为a,前视B尺读数为b,则A、B两点高差为: 图2-1-1 水准测量原理 (2)高程的计算 如图2-1-1,根据已知点A的高程HA和测定的高差,可计算点B的高程H B,可用两种方法计算,即: 1)高差法:即直接利用A、B两点间的高差h AB来计算B点高程的方法。 2)仪高法:即利用仪器视线高程H A来计算B点高程的方法。 2、水准测量的仪器和工具 (1)水准仪 水准测量所使用的仪器称为水准仪,辅助工具为水准尺和尺垫等。水准仪按其精度可分为DS05、DS l、DS3和DSl0四个等级;按结构可分为微倾式水准仪和自动安平水准仪;按造构可分为光学水准仪和电子水准仪。目前工程测量中,广泛使用DS3级水准仪。因此,本章着重介绍这类仪器。 1)DS3微倾式水准仪的构造 DS3微倾式水准仪主要由望远镜、水准器及基座三部分构成。如图2-1-2 图2-1-2 DS3微倾式水准仪 图2-1-2 DS3微倾式水准仪 ①望远镜 如图2-1-3,DS3水准仪望远镜主要由物镜、目镜、对光透镜和十字丝分划板所组成。物镜和目镜多采用复合透镜组,十字丝分划板上刻有两条互相垂直的长线,竖直的一条称竖丝,横的一条称为中丝,是为了瞄准目标和读取读数用的。在中丝的上下还对称地刻有两条与中丝平行的短横线,是用来测定距离的,称为视距丝。十字丝 MSP430F5529测量频率 -----测周法信号变换电路 过零比较器,lm393输出上拉电阻,两电阻分压 程序 #include // Wait till SVM is settled while ((PMMIFG & SVSMLDL YIFG) == 0); // Clear already set flags PMMIFG &= ~(SVMLVLRIFG + SVMLIFG); // Set VCore to new level PMMCTL0_L = PMMCOREV0 * level; // Wait till new level reached if ((PMMIFG & SVMLIFG)) while ((PMMIFG & SVMLVLRIFG) == 0); // Set SVS/SVM low side to new level SVSMLCTL = SVSLE + SVSLRVL0 * level + SVMLE + SVSMLRRL0 * level; // Lock PMM registers for write access PMMCTL0_H = 0x00; } void init_clock() { SetVcoreUp (0x01); SetVcoreUp (0x02); SetVcoreUp (0x03); UCSCTL3 = SELREF_2; // Set DCO FLL reference = REFO UCSCTL4 |= SELA_2; // Set ACLK = REFO __bis_SR_register(SCG0); // Disable the FLL control loop UCSCTL0 = 0x0000; // Set lowest possible DCOx, MODx UCSCTL1 = DCORSEL_7; // Select DCO range 50MHz operation UCSCTL2 = FLLD_0 + 609; // Set DCO Multiplier for 25MHz // (N + 1) * FLLRef = Fdco // (762 + 1) * 32768 = 25MHz // Set FLL Div = fDCOCLK/2 __bic_SR_register(SCG0); // Enable the FLL control loop __delay_cycles(782000); do { UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG); // Clear XT2,XT1,DCO fault flags SFRIFG1 &= ~OFIFG; // Clear fault flags }while (SFRIFG1&OFIFG); // Test oscillator fault flag } void send_char(char sc) { UCA0TXBUF=sc; while(!(UCA0IFG&UCTXIFG)); 目录 1、摘要 (1) 2、正文 (2) 2.1、设计目的 (2) 2.2、设计原理 (2) (1)、MTLAB简介 (2) (2)、连续时间信号 (2) (3)、采样定理 (3) (4)、信号重构 (5) 2.3、信号采样和恢复的程序 (5) (1)设计连续信号 (6) (2)设计连续信号的频谱 (7) (3)设计采样信号 ........................................错误!未定义书签。 (4)设计采样信号的频谱图 (9) (5)设计低通滤波器 (10) (6)恢复原信号 (12) 3、总结和致谢........................... 错误!未定义书签。 4、参考文献 (15) 1.摘要 本次课程设计使用MATLAB实现连续信号的采样和重构仿真,了解MATLAB软件,学习使用MATLAB软件的仿真技术。它主要侧重于某些理论知识的灵活运用,以及一些关键命令的掌握,理解,分析等。初步掌握线性系统的设计方法,培养独立工作能力。 加深理解采样和重构的概念,掌握利用MATLAB分析系统频率响应的方法和掌握利用MATLAB实现连续信号采用和重构的方法。计算在临界采样、过采样、欠采样三种不同条件下重构信号的误差,并由此总结采样频率对信号重构误差的影响。 要做到以下基本要求: 1. 掌握利用MATLAB分析系统频率响应的方法,增加对仿真软件MATLAB的感性认识,学会该软件的操作和使用方法。 2. 掌握利用MATLAB实现连续信号采用和重构的方法,加深理解采样和重构的概念。 3 . 初步掌握线性系统的设计方法,培养独立工作能力。 4. 学习MATLAB中信号表示的基本方法及绘图函数的调用,实现对常用连续时间信号的可视化表示,加深对各种电信号的理解。 5. 加深理解采样对信号的时域和频域特性的影响;验证信号和系统的基本概念、基本理论,掌握信号和系统的分析方法。 6. 加深对采样定理的理解和掌握,以及对信号恢复的必要性;掌握对连续信号在时域的采样和重构的方法。 测量仪器和测量工具管理制度 1?仪器工具的借领 (1)以小组为单位前往测量实验室借领测量仪器工具。仪器工具均有编号,借领时应当场清点和检查,如有缺损,立即补领或更换。 (2)仪器搬运前,应检查仪器背带和提手是否牢固,仪器箱是否锁好,搬运仪器工具时,应轻拿轻放,避免剧烈震动和碰撞。 (3)实验或实习结束后,应清理仪器工具上的泥土,及时收装仪器工具,送还仪器室。仪器工具如有损坏和丢失,应写出书面报告说明情况,并按有关规定给予赔偿。 2?仪器的安装 (1)开箱取出仪器之前,应看清仪器在箱中的安放位置,以免装箱时发生困难。 (2)架设仪器脚架时,3条腿抽出的长度和3条腿分开的跨度要适中,架头大致水平。若地面为泥土地面,应将脚架尖踩人土中,以防仪器下沉。若在斜坡地上架设仪器脚架,应使两条腿在坡下,一条腿在坡上。若在光滑地面上架设仪器脚架,要采取安全措施,防止仪器脚架打滑。 (3)仪器箱应平稳放在地面上或其他平台上才能开箱。开箱后应注意仪器的安放位置,以便用毕后按原样装箱。取仪器前应先松开制动螺旋,以免在取出仪器时因强行扭转而损坏制动装置。 (4)取仪器时,应双手握住照准部支架或基座部分取出,然后轻轻放到三脚架头上。一手仍握住照准部支架,另一手将中心连接螺旋旋入基座底板的连接孔内旋紧。预防因忘记拧上中心连接螺旋或拧得不紧而摔坏仪器。 (5)从仪器箱取出仪器后,要随即将仪器箱盖好,以免沙土杂草进入箱内。禁止坐、蹬仪器箱。 3?仪器的使用 (1)在任何时候,仪器旁必须有人看管,做到“人不离仪器”,以防止其他无关人员拨弄仪器或行人、车辆撞倒仪器。在太阳或细雨下使用仪器时,必须撑伞保护仪器,特别注意仪器不得受潮,雨大必须停止观测。 电子科技大学 实 验 报 告 学生姓名: 学号: 指导老师: 日期:2016年 12月 10日 一、实验室名称: 连续信号的采样和恢复 二、实验项目名称: 实验项目四:连续信号的采样和恢复 三、实验原理: 实际采样和恢复系统如图3.4-1所示。可以证明,奈奎斯特采样定理仍然成立。 ? ) x t ) (t P T ) 图3.4-1 实际采样和恢复系统 采样脉冲: 其中,T s πω2=, 2/)2/sin(τωτωτs s k k k T a =,T <<τ。 采样后的信号: ∑∞ -∞ =-=?→←k s S F S k j X T j X t x ) ((1)()(ωωω 当采样频率大于信号最高频率两倍,可以用低通滤波器)(ωj H r 由采样后的 ()()2() F T T k s k p t P j a k ωπδωω+∞ =-∞ ←?→= -∑ 信号)(t x S 恢复原始信号)(t x 。 目的:1、使学生通过采样保持电路理解采样原理。 2、使学生理解采样信号的恢复。 任务:记录观察到的波形与频谱;从理论上分析实验中信号的采样保持与恢 复的波形与频谱,并与观察结果比较。 四、实验内容 实验内容(一)、采样定理验证 实验内容(二)、采样产生频谱交迭的验证 五、项目需用仪器设备名称:数字信号处理实验箱、信号与系统实验板的低通滤 波器模块U11和U22、采样保持器模块U43、PC 机端信号与系统实验软件、+5V 电源 六、实验步骤: 打开PC 机端软件SSP.EXE ,在下拉菜单“实验选择”中选择“实验六”;使用串口电缆连接计算机串口和实验箱串口,打开实验箱电源。 实验内容(一)、采样定理验证 实验步骤: 1、连接接口区的“输入信号1”和“输出信号”,如图3.4-2所示。 图3.4-2 观察原始信号的连线示意图 2、信号选择:按“3”选择“正弦波”,再按“+”或“-”设置正弦波频率为“2.6kHz ”。 按“F4”键把采样脉冲设为10kHz 。 七、实验数据及结果分析: 少年易学老难成,一寸光阴不可轻 - 百度文库 1 精确的频率和时间测量 - 时基的选择 上篇文章谈到了频率和时间测量的分辨率和精度。相信很多工程师会感兴趣测量一个结果后,其误差或不确定度到底是多少。测量的不确定度是由3个因素构成的,即 基本不确定度 = k* (随机不确定度 ± 系统不确定度 ± 时基不确定度) 事实上,要获得准确的随机不确定度和系统不确定度是一件非常恐怖的事情。它是与众多参数相关的非常复杂的函数。如果诸位有兴趣了解这个,可以到网上查阅安捷伦53200 系列频率计数器的详细资料,出版号是 5990-6283CHCN 。 好在安捷伦的工程师将这个复杂的运算公式做成了一个简单的表格。您只需输入测量的相关设置和结果,这个表格可以自动帮助你得出不确定度。如果有兴趣,可以与安捷伦的电话服务中心联系 400-810-0189 关于随机不确定度和系统不确定度,这与闸门时间和测量次数密切相关。简单地讲,延长闸门时间和增加测量次数,都可以降低者两个不确定度。但时基的不确定度是由计数器本身的老化和工作环境,以及其本身的相位噪声等参数决定的。频率计数器的测量精度始于时基,因为它建立了测量输入信号的参考。更好的时基有可能得到更好的测量。例如,如果时基的月老化率是0.1ppm ,仪器在校准后一个月内使用,它对10MHz 信号测量带来的不确定度则是 1Hz 。 但如果老化率是0.01ppm, 其带来的不确定度只有0.1Hz. 环境温度对石英晶体的振动频率有很大影响,可根据热行为把时基技术分为三类: 1. 标准时基。标准或“室温”时基,不使用任何类型的温度补偿或控制。其最大优点是便宜,但它也有最大的频率误差。下图中的曲线示出典型晶体的热行为。随着环境温度的改变,频率输出能变化5ppm 或更高。对于1MHz 信号为±5Hz ,因此是测量中必须考虑的重要因素。在通用侧测试仪器,如示波器、函数信号发生器、频谱仪中,采用的是这种时基。在过去低端的频率计数器,其标准配置的时基也这这种得标准时基 2. 温度补偿时基。有时,我们也称之为高稳时基。一种解决晶体热变化的方法是让振荡器电路中的其它电子元件补偿其热响应。这种方法可稳定其热行为,把时基误差降低到约0.1ppm (对1MHz 信号为±10.1Hz )典型的事安捷伦53200A 系列频率计数器标准配置的时基就是这种,其老化率可达到0.1ppm 。 有时,这种时基也被用于输出频率精度更高的信号源,如安捷伦的33520A 系列函数和任意波性发生器,这种时基就是一个选件 3. 恒温槽控制。稳定振荡器输出的最有效方法是让晶体免受温度变化。计数器设计师把晶体放入恒温槽,保持其温度在热响应曲线的特定点。从而能得到好得多的时基稳定度,典型误差只有0.0025ppm (对于1MHz 信号为±0.0025Hz )。 实验项目六:连续信号的采样和恢复 一、实验项目名称:连续信号的采样和恢复 二、实验目的与任务 目的:1、使学生通过采样保持电路理解采样原理。 2、使学生理解采样信号的恢复。 任务:记录观察到的波形与频谱;从理论上分析实验中信号的采样保持与恢 复的波形与频谱,并与观察结果比较。 三、实验原理: 实际采样和恢复系统如图3.6-1所示。可以证明,奈奎斯特采样定理仍然成立。 x ) (t P T ) 图3.6-1 实际采样和恢复系统 采样脉冲: 其中,T s π ω2= ,2 /)2/sin(τωτωτs s k k k T a =,T <<τ。 采样后的信号: ∑∞ -∞ =-=?→←k s S F S k j X T j X t x )((1)()(ωωω 当采样频率大于信号最高频率两倍,可以用低通滤波器)(ωj H r 由采样后的 ()()2() F T T k s k p t P j a k ωπδωω+∞ =-∞ ←?→= -∑ 信号)(t x S 恢复原始信号)(t x 。 四、实验内容 打开PC 机端软件SSP.EXE ,在下拉菜单“实验选择”中选择“实验六”;使用串口电缆连接计算机串口和实验箱串口,打开实验箱电源。 实验内容(一)、采样定理验证 实验步骤: 1、连接接口区的“输入信号1”和“输出信号”,如图3.6-2所示。 图3.6-2 观察原始信号的连线示意图 2、信号选择:按“3”选择“正弦波”,再按“+”或“-”设置正弦波频率为“2.6kHz ”。按“F4”键把采样脉冲设为10kHz 。 图3.6-3 2.6kHz 正弦波(原始波形) 3、点击SSP 软件界面上的按钮,观察原始正弦波,如图3.6-3 所示。 4、按图3.6-4的模块连线示意图连接各模块。 高精度时间间隔测量方法综述 孙 杰 潘继飞 (解放军电子工程学院,安徽合肥,230037) 摘要:时间间隔测量技术在众多领域已经获得了应用,如何提高其测量精度是一个迫切需要解决的问题。在分析电子计数法测量原理与误差的基础上,重点介绍了国内外高精度时间间隔测量方法,这些方法都是对电子计数法的原理误差进行测量,并且取得了非常好的效果。文章的最后给出了高精度时间间隔测量方法的发展方向及应用前景。 关键词:时间间隔;原理误差;内插;时间数字转换;时间幅度转换 Methods of High Precision Time-Interval Measurement SUN Jie , PAN Ji-fei (Electronic Engineering Institute of PLA, HeFei 230037, China ) Abstract: Technology of time-interval measurement has been applied in many fields. How to improve its precision is an emergent question. On the bases of analyzing electronic counter ’s principle and error, this paper puts emphasis upon introducing high precision time-interval measurements all over the world. All these methods aim at electronic counter ’s principle error, and obtain special effect. Lastly, the progress direction and application foreground of high precision time-interval measurement methods are predicted. Key Words: time interval; principle error; interpolating; time-to-digital conversion; time-to-amplitude conversion 0引言 时间有两种含义,一种是指时间坐标系中的某一刻;另一种是指时间间隔,即在时间坐标系中两个时刻之间的持续时间,因此,时间间隔测量属于时间测量的范畴。 时间间隔测量技术在通信、雷达、卫星及导航定位等领域都有着非常重要的作用,因此,如何高精度测量出时间间隔是测量领域一直关注的问题。本文详细分析了目前国内外所采用的高精度时间间隔测量方法,指出其发展趋势,为研究新的测量方法指明了方向。 1 电子计数法 1.1 测量原理与误差分析 在测量精度要求不高的前提下,电子计数法是一种非常好的时间间隔测量方法,已经在许多领域获得了实际应用,其测量原理如图1 量化时钟频率为 0f ,对应的周期001f T =,在待测脉冲上升沿计数器输出计数脉冲个数N M ,,1T ,2T 为待测脉 冲上升沿与下一个量化时钟脉冲上升沿之间的时间间隔,则待测脉冲时间间隔x T 为: ()210T T T M N T x -+?-= (1) 然而,电子计数法得到的是计数脉冲个数N M ,,因此其测量的脉冲时间间隔为: ()0' T M N T x ?-= (2) 比较表达式(1)(2)可得电子计数法的测量误差为21T T -=?,其最大值为一个量化时钟周期0T ,产生的原因是待 测脉冲上升沿与量化时钟上升沿的不一致,该误差称为电子计数法的原理误差。 除了原理误差之外,电子计数法还存在时标误差,分析表达式(2)得到: ()()00'..T M N T M N T x ?-+-?=? (3) 比较表达式(3)(2): ()()00 ''T T M N M N T T x x ?+--?=? (4) 根据电子计数法原理,()1±=-? M N ,0'T T M N x =-,因此: 00'0'T T T T T x x ??+±=? (5) 00'T T T x ??即为时标误差,其产生的原因是量化时钟的稳定度00T T ?,可以看出待测脉冲间隔x T 越大,量化时钟的稳 定度导致的时标误差越大。 作者简介:孙杰: (1975—),男(汉族),安徽合肥人,解放军电子工程学院讲师 潘继飞:(1978—),男(汉族),安徽凤阳人,解放军电子工程学院信号与信息处理专业博士生 建筑工程测量 水准测量仪器与工具 一、水准测量的仪器和工具及其使用 水准测量使用的仪器为水准仪,工具为水准尺和尺垫。水准仪按其精度分为DS 0.5 、 DS 1、DS 3 和DS 10 等几种等级。代号中的“D”和“S”是“大地”和“水准仪”的汉语拼音 的第一个字母,其下标数值意义为:仪器本身每公里往返测高差中数能达到的精度,以毫米计。 工程测量一般使用DS 3级水准仪。如图2-2所示,为DS 3 型微倾式水准仪视图,它主 要由远望镜、水准器和基座三个基本部分组成。 1.望远镜 水准仪的望远镜是用来瞄准水准尺并读数的,主要由物镜、目镜、对光螺旋和十字丝分划板组成。如图2-3所示,为DS 3 型微倾式水准仪内对光式倒像望远镜构造略图。图2-4是望远镜成像原理,其中物镜的作用是使远处的目标在望远镜的焦距内形成一个倒立的缩小的实像。当目标处在不同距离时,可调节对光螺旋,带动凹透镜使成像落在十字丝分划板上,这时,十字丝和物像同时被目镜放为虚像,以便观测者利用十字丝来瞄准目标。当十字丝的交点瞄准到目标上某一点时,该目标点即在十字丝交点与物镜光心的连线上,这条线称为视准轴,也称为视线。十字丝分划板是用刻有纵贯十字丝的平面玻璃制成,装在十字丝环上,再用固定螺丝固定在望远镜筒内,如图2-5所示。 2.水准器 水准器用来指示仪器视线是否水平或竖轴是否竖直。有管水准器和圆水准器两种。 (1)管水准器(水准管) 水准管是一个封闭的玻璃管,管的内壁在纵向磨成圆弧形,内盛酒精和乙醚的混合液,经过加热、封闭、冷却后,管内形成一个气泡(图2-6)。水准管内表面的中点0称为零点,通过零点作圆弧的纵向切线LL 称为水准管轴。当气泡中心点与零点重合时,称为气泡居中,此时水准管轴水平。自零点向两侧每隔2mm 刻一个分划,每2mm 弧长所对的圆心角称为水准管分划值: R ' '2ρτ= 图2-3 望远镜构造略图 图2-4 望远镜成像原理 图2-5 十字丝板装置 信号的采样与恢复实验 一、任务与目的 1. 熟悉信号的采样与恢复的过程。 2. 学习和掌握采样定理。 3. 了解采样频率对信号恢复的影响。 二、原理(条件) PC机一台,TD-SAS系列教学实验系统一套。 1. 采样定理 采样定理论述了在一定条件下,一个连续时间信号完全可以用该信号在等时间间隔上的瞬时值表示。这些值包含了该连续信号全部信息,利用这些值可以恢复原信号。采样定理是连续时间信号与离散时间信号之间的桥梁。 采样定理:对于一个具有有限频谱,且最高频率为ωmax的连续信号进行采样,当采样频率ωs满足ωs>=ωmax时,采样信号能够无失真地恢复出原信号。三角波信号的采样如图4-1-1所示。 图4-1-1信号的采样 2. 采样信号的频谱 连续周期信号经过周期矩形脉冲抽样后,抽样信号的频谱为 它包含了原信号频谱以及重复周期为的原信号频谱的搬移,且幅度按规律变化。所以抽样信号的频谱便是原信号频谱的周期性拓延。某频带有限信号被采样前后频谱如图4-1-2。 图4-1-2 限带信号采样前后频谱 从图中可以看出,当ωs ≥2Bf 时拓延的频谱不会与原信号的频谱发生重叠。这样只需要利用截止频率适当的滤波器便可以恢复出原信号。 3. 采样信号的恢复 将采样信号恢复成原信号,可以用低通滤波器。低通滤波器的截止频率f c 应当满足f max ≤f c ≤f x -f max 。实验中采用的低通滤波器原理图如图4-1-3所示,其截止频率固定为 1802f Hz RC π=≈ 图4-1-3 滤波器电路 4. 单元构成 本实验电路由脉冲采样电路和滤波器两个部分构成,滤波器部分不再赘述。其中的采样保持部分电路由一片CD4052完成。此电路由两个输入端,其中IN1端输入被采样信号,Pu 端输入采样脉冲,经过采样后的信号如图4-1-1所示。 三、内容与步骤 本实验在脉冲采样与恢复单元完成。 1. 信号的采样 信号的采样与恢复 (安徽建筑工业学院电子与信息学院课程设计) 2012年06月29日 此稿仅为借鉴 摘要 (2) 正文 一、设计目的与要求 (3) 二、设计原理 (4) 三、设计内容和步骤 (5) 1.用MATLAB产生连续信号y=sin(t)和其对应的频谱 (6) 2.对连续信号y=sin(t)进行抽样并产生其频谱 (7) 3. 通过低通滤波恢复原连续信号 (9) 四、总结 (12) 五、数据分析 (13) 六、参考文献 (1) 摘要 数字信号处理是一门理论与实践紧密结合的课程。做大量的习题和上机实验,有助于进一步理解和巩固理论知识,还有助于提高分析和解决实际问题的能力。过去用其他算法语言,实验程序复杂,在有限的实验课时内所做的实验内容少。MATLAB强大的运算和图形显示功能,可使数字信号处理上机实验效率大大提高。特别是它的频谱分析和滤波器分析与设计功能很强,使数字信号处理工作变得十分简单、直观。 本实验设计的题目是:信号的采样与恢复、采样定理的仿真。通过产生一个连续时间信号并生成其频谱,然后对该连续信号抽样,并对采样后的频谱进行分析,最后通过设计低通滤波器滤出抽样所得频谱中多个周期中的一个周期频谱,并显示恢复后的时域连续信号。实验中,原连续信号的频谱由于无法实现真正的连续,所以通过扩大采样点的数目来代替,理论上当采样点数无穷多的时候即可实现连续,基于此尽可能增加采样点数并以此来产生连续信号的频谱。信号采样过程中,通过采样点的不同控制采样频率实现大于或小于二倍最高连续信号的频率,从而可以很好的验证采样定理。信号恢复,滤波器的参数需要很好的设置,以实现将抽样后的信号进行滤波恢复原连续信号。 一、设计目的与要求 1.设计目的和要求 1.掌握利用MATLAB在数字信号处理中的基本应用,并会对结果用所学知识进 行分析。 2.对连续信号进行采样,在满足采样定理和不满足采用定理两种情况下对连 续信号和采样信号进行FFT频谱分析。 3.从采样信号中恢复原信号,对不同采样频率下的恢复信号进行比较分析。 4.基本要求:每组一台电脑,电脑安装MATLAB6.5版本以上软件。 二、设计原理 任务一水准测量仪器和工具的使用 1、能说出水准仪各部件的名称及作用。 2、能将中心连接螺旋顺利旋入基座,松紧度适宜。 3、能安置脚架高度合适、脚架的张开角度适当架头是否大致水平。 4、能转动调焦螺旋并改变望远镜的焦距。 5、能利用目镜对光螺旋进行目镜对光。 6、会仪器制动后通过微动螺旋微动。 7、能转动微倾螺旋以使符合气泡影像上下错动。 8、能够调清十字丝和目标影像。 9、能运用粗瞄装置寻找水准尺。 10、能有效地消除视差现象对读数的影响。 11、能快速粗平。 12、能精确照准目标。 13、能快速、精确的精平。 14、能快速、正确地读数并计算出高差。 15、什么叫视准轴?什么是水准管轴?如何使视准轴水平? 16、能正确扶尺。 18学时 在土木工程勘测设计、施工、运营养护的各个阶段,有相当数量的地面点需要测定其高程。它的核心内容是用水准仪测量地面点之间的高差,通过测出已知高程点与未知点之间的高差,然后由已知点高程推算未知点的高程。阅读学习资源中有关水准仪构造的内容,在实训中对照水准仪实物熟悉其各部件的功能及工作原理。结合水准测量原理和水准仪的构造,充分理解水准仪的技术操作步骤,并完成水准仪的实际操作训练。 =? 在接受工作任务后,应首先了解工作场地的环境、测量仪器、工具的管理要求,在老师的指导下理解水准测量的原理,熟练掌握水准仪的构造,熟知水准仪个部件的名称和操 作要领、正确进行水准仪的技术操作,分别读出前后读数并计算高差。 学习活动1 水准仪认知(4学时) 学习活动2 水准仪粗平(2学时) 学习活动3 瞄准水准尺、消除视差(2学时) 学习活动4 精平与读数(2学时) 学习活动5 测量两点间高差(8学时) 学习活动1 水准仪认知 能说出水准仪的种类、等级,正确选用水准仪。 能严格遵守安全规章制度,按要求规范使用仪器、工具。 能写出水准仪构造组成。 能说出水准仪各部件的名称作用。 建议学时: 4学时 测量仪器及工具使用规范、DS3水准仪、三脚架、水准尺、尺垫、水准测量记录表、教材。 1.查资料,熟悉水准仪的种类等级。 (1)水准测量使用的仪器为水准仪,工具为水准尺和尺垫。水准仪按其精度分为和.等几种等级。 (2)代号中的“D”和“s”是“大地”和“水准仪”的汉语拼音的第一个字母,其下标数值意义为:,以毫米计。 (3)工程测量一般使用级水准仪。 2.利用水准仪实物,结合下图熟悉水准仪构造组成、说出水准仪各部件的名称作用。 用示波器测量信号的电压及频率 长江大学马天宝应物1203班 1、示波器和使用 -【实验目的】 1.了解示波器的大致结构和工作原理。 2.学习低频信号发生器和双踪示波器的使用方法。 3.使用示波器观察电信号的波形,测量电信号的电压和频率。 【实验原理】 一、示波器原理 1.示波器的基本结构 示波器的种类很多,但其基本原理和基本结构大致相同,主要由示波管、电子放大系统、扫描触发系统、电源等几部分组成,如图4.9-1所示。 (1)示波管 示波管又称阴极射线管,简称CRT,其基本结构如图4.9-2所示,主要包括电子枪、偏转系统和荧光屏三个部分。 电子枪:由灯丝、阳极、控制栅极、第一阳极、第二阳极五部分组成。灯丝通电后,加热阴极。阴极是一个表面涂有氧化物的金属圆筒,被加热后发射电子。控制栅极是一个顶端有小孔的圆筒,套在阴极外面,它的电位相对阴极为负,只有初速达到一定的电子才能穿过栅极顶端的小孔。因此,改变栅极的电位,可以控制通过栅极的电子数,从而控制到达荧光屏的电子数目,改变屏上光斑的亮度。示波器面板上的“亮度”旋钮就是起这一作用的。阳极电位比阴极高得多,对通过栅极的电子进行加速。被加速的电子在运动过程中会向四周发散,如果不对其进行聚焦,在荧光屏上看到的将是模糊一片。聚焦任务是由阴极、栅极、阳极共同形成的一种特殊分布的静电场来完成的。这一静电场是由这些电极的几何形状、相对位置及电位决定的。示波器面板上的“聚焦”旋钮就是改变第一阳极电位用的,而“辅助聚焦”就是调节第二阳极电位用的。 偏转系统:它由两对互相垂直的平行偏转板——水平偏转板和竖直偏转板组成。只有在偏转板上加上一定的电压,才会使电子束的运动方向发生偏转,从而使荧光屏上光斑的位置发生改变。通常,在水平偏转板上加扫描信号,竖直偏转板上加被测信号。. 荧光屏:示波管前端的玻璃屏上涂有荧光粉,电子打上去它就会发光,形成光斑。荧光材料不同,发光的颜色不同,发光的延续时间(余辉时间)也不同。玻璃屏上带有刻度,供测量时使用。 (2)电子放大系统 为了使电子束获得明显的偏移,必须在偏转板上加上足够的电压。被测信号一般比较弱,必须进行放大。竖直(Y轴)放大器和水平(X轴)放大器就是起这一作用的。 (3)扫描与触发系统 扫描发生器的作用是产生一个与时间成正比的电压作为扫描信号。触发电路的作 电 子 科 技 大 学 实 验 报 告(二) 学生姓名: 学 号: 指导教师:实验室名称:信号与系统实验室 一、 实验项目名称:连续信号的采样和恢复 三、实验原理: 实际采样和恢复系统如图3.4-1所示。可以证明,奈奎斯特采样定理仍然成立。 ? ) x t ) (t P T ) 图3.4-1 实际采样和恢复系统 采样脉冲: 其中,T s πω2= ,2 /)2/sin(τωτωτs s k k k T a =,T <<τ。 采样后的信号: ∑∞ -∞ =-=?→←k s S F S k j X T j X t x )((1)()(ωωω 当采样频率大于信号最高频率两倍,可以用低通滤波器)(ωj H r 由采样后的信号)(t x S 恢复原始信号)(t x 。 四、实验目的与任务: ()()2() F T T k s k p t P j a k ωπδωω+∞ =-∞ ←?→= -∑ 目的:1、使学生通过采样保持电路理解采样原理。 2、使学生理解采样信号的恢复。 任务:记录观察到的波形与频谱;从理论上分析实验中信号的采样保持与恢复的波形与频谱,并与观察结果比较。 五、实验内容: 1、采样定理验证 2、采样产生频谱交迭的验证 六、实验器材(设备、元器件): 数字信号处理实验箱、信号与系统实验板的低通滤波器模块U11和U22、采样保持器模块U43、PC机端信号与系统实验软件、+5V电源,连接线、计算机串口连接线等。 七、实验步骤: 打开PC机端软件SSP.EXE,在下拉菜单“实验选择”中选择“实验六”;使用串口电缆连接计算机串口和实验箱串口,打开实验箱电源。 【1.采样定理验证】 1、连接接口区的“输入信号1”和“输出信号”,如图1所示。 图1 观察原始信号的连线示意图 2、信号选择:按“3”选择“正弦波”,再按“+”或“-”设置正弦波频率为“2.6kHz”。按“F4”键把采样脉冲设为10kHz。 3、点击SSP软件界面上的按钮,观察原始正弦波。 4、按图2的模块连线示意图连接各模块。 时间频率测量技术的发展与应用 陈洪卿 (中国科学院国家授时中心) 1时间频率精密测量的目的和意义 信息化时代的到来,高精度时问频率已经成为一个国家科技、经济、政治、军事和社会生活中至关 重要的一个参量。时间的应用范围已经渗透到从基础研究领域(天文学、地球动力学、物理学等)到工程 技术领域(信息传递、电力输配、深空跟踪、空间旅行、导航定位、武器实验、地震监测、计量测试等),以及关系到国计民生的国家诸多重要部门和领域(交通运输、金融证券、邮电通信等)的各个方面,几乎无所不及。 中国科协副主席、时间工作专家叶叔华院士认为“生活离不开时间频率,它是高新技术的基础”。“863”高科技计划倡导者陈芳允院士认为“时间频率在工业、交通、电信等方面的应用十分广泛。计时、工业控制、定位导航、现代数字化技术和计算机都离不开时频技术和时频测量”。它“在科技发展和社会进步中占有特殊重要的地位。”[1]2003年全国时间频率学术会议上,王义道教授作特邀报告“建设我国独立自主时间频率系统的思考”[2]指出:时间频率系统是维护国家安全和独立自主的命脉;现代化战争中原子钟比原子弹更重要;精密时间频率广泛应用于现代通信、导航、制导、定位、天文观察、大地测量、地质勘探、电网调配、电子对抗、交通管理、精密测量、科学研究等领域,设备需求量很大;标准频率与时间信号可以通过电磁波发射、传播、接收,直接为各种应用服务。 时间是国际单位制中的最基本的物理量之一,也是目前能够实现的测量不确定度最小的物理量。时间测量的精密度可小于10—18,准确度可达10一15。这使时间频率在计量、测量领域中起着十分突出的领先和独特作用[3]。因此,其它的物理量,如果能够通过一定的物理关系和物理常数转化为时间 频率量来进行测量,用时间测量来表征,那么,该物理量的测量 精度将会大大提高,并使计量单位趋向于统一。典型的例子,莫过于长度单位一米的定义。100 多年前,为适应世界贸易和科学技术发展需求,为统一国际长度度量单位和标准,成立国际米 制委员会,并确定和保持米尺原器,成为现代国际公制计量系统的基础。长度单位一米的测量 精度好不容易才达到10一8[4]。而今,由光速不变原理和L=CT确定长度,长度单位l米=真 空中光在1/299 792458秒时间内传播的距离,这样就可以用时间测量来表征长度测量,其精 度就提高到lO一9以上。作为原始基准的独立定义的长度单位,蜕变成由时间一光速联合定义的导出单位,长度单位就统一于时间单位了。此外,通过交流约瑟夫森量子效应,从加在约瑟 夫森结上的电压V与所产生的交流电频率之间的关系f=(2e/h)/v和国际协定常数值2e/h=483 597.9GHz/V,由测量频率求得电压;也可以求得电流、电阻以及温度等等[3]。 #include //rw=0; rs=1; P0=shuju; delay(5); en=1; delay(5); en=0; } void write_fre(unsigned long pin) //写入频率函数{ uchar ge ,shi,bai,qian,wan,shiwan; ge=pin%10/1; shi=pin%100/10; bai=pin%1000/100; qian=pin%10000/1000; wan=pin%100000/10000; shiwan=pin%1000000/100000; write_data(shiwan+48); delay(5); write_data(wan+48); 21世纪中国电子仪器发展战略研讨会2004年9月时间频率测量技术的发展与应用 陈洪卿 (中国科学院国家授时中心) 1时间频率精密测量的目的和意义 信息化时代的到来,高精度时问频率已经成为一个国家科技、经济、政治、军事和社会生活中至关 重要的一个参量。时间的应用范围已经渗透到从基础研究领域(天文学、地球动力学、物理学等)到工程 技术领域(信息传递、电力输配、深空跟踪、空间旅行、导航定位、武器实验、地震监测、计量测试等),以及关系到国计民生的国家诸多重要部门和领域(交通运输、金融证券、邮电通信等)的各个方面,几乎无所不及。 中国科协副主席、时间工作专家叶叔华院士认为“生活离不开时间频率,它是高新技术的基础”。“863”高科技计划倡导者陈芳允院士认为“时间频率在工业、交通、电信等方面的应用十分广泛。计时、工业控制、定位导航、现代数字化技术和计算机都离不开时频技术和时频测量”。它“在科技发展和社会进步中占有特殊重要的地位。”[1]2003年全国时间频率学术会议上,王义道教授作特邀报告“建设我国独立自主时间频率系统的思考”[2]指出:时间频率系统是维护国家安全和独立自主的命脉;现代化战争中原子钟比原子弹更重要;精密时间频率广泛应用于现代通信、导航、制导、定位、天文观察、大地测量、地质勘探、电网调配、电子对抗、交通管理、精密测量、科学研究等领域,设备需求量很大;标准频率与时间信号可以通过电磁波发射、传播、接收,直接为各种应用服务。 时间是国际单位制中的最基本的物理量之一,也是目前能够实现的测量不确定度最小的物理量。时间测量的精密度可小于10—18,准确度可达10一15。这使时间频率在计量、测量领域中起着十分突出的领先和独特作用[3]。因此,其它的物理量,如果能够通过一定的物理关系和物理常数转化为时间频率量来进行测量,用时间测量来表征,那么,该物理量的测量 精度将会大大提高,并使计量单位趋向于统一。典型的例子,莫过于长度单位一米的定义。100 多年前,为适应世界贸易和科学技术发展需求,为统一国际长度度量单位和标准,成立国际米 制委员会,并确定和保持米尺原器,成为现代国际公制计量系统的基础。长度单位一米的测量 精度好不容易才达到10一8[4]。而今,由光速不变原理和L=CT确定长度,长度单位l米=真 空中光在1/299 792458秒时间内传播的距离,这样就可以用时间测量来表征长度测量,其精 度就提高到lO一9以上。作为原始基准的独立定义的长度单位,蜕变成由时间一光速联合定义的导出单位,长度单位就统一于时间单位了。此外,通过交流约瑟夫森量子效应,从加在约瑟 夫森结上的电压V与所产生的交流电频率之间的关系f=(2e/h)/v和国际协定常数值2e/h=483 597.9GHz/V,由测量频率求得电压;也可以求得电流、电阻以及温度等等[3]。 水准测量的仪器和工具 水准测量所使用的仪器为水准仪,辅助工具为水准尺和尺垫。水准仪按其精度高低可分为D S05、D S1、 D S3和D S10等四个等级(D、S分别为“大地测量”和“水准仪”)的汉语拼音的第一个字母;数字05、1、 3、10表示该仪器的标称精度,是指用该仪器进行水准测量时,往返测1公里高差中数中误差,其单位是m m);按结构可分为微倾式水准仪和自动安平式水准仪;按构造可分为光学水准仪和电子水准仪。本章着重介绍D S3水准仪,简单介绍精密水准仪和电子水准仪。 一、D S3微倾式水准仪的构造 根据水准测量的原理,水准仪的主要作用是提供一条水平视线,并能照准水准尺进行读数。因此,水 准仪主要由望远镜、水准器及基座三部分构成。2-2所示是我国生产的D S3微倾式水准仪。 1、望远镜 2-3是D S3微倾式水准仪望远镜的构造图,它主要由物镜1、目镜2、调焦透镜3和十字丝分划板4 所组成。物镜和目镜多采用复合透镜组,十字丝分划板上刻有两条互相垂直的长线,如2-3中的7, 竖直的一条称为竖丝,横的较长那条称为中丝,是为了瞄准目标和读取读数用的。在中丝的上下还对称地刻有两条与中丝对称的短横线,是用来测定距离的,称为视距丝。十字丝分划板是由平板玻璃圆片制成的,平板玻璃片在分划板座上,分划板座由固定螺丝固定在望远镜筒上。十字丝交点与物镜光心的连线,称为 视准轴或视线(2-3)中的(C-C1)。水准测量是在视准轴水平时,用十字丝的中丝截取水准尺上的读数。 2-4为望远镜成像原理图。远处目标A B发出的光线经过物镜1及调焦透镜3折射后,在十字丝平面4上形成一个倒立而缩小的实像a b;通过目镜2的放大,成虚相aˊbˊ,十字丝同时也被放大。 从望远镜内所看到的目标影像的视角与肉眼直接观察该目标的视角之比,称为望远镜的放大率。如 2-4所示,从望远镜内看到目标的像所对的视角为β,用肉眼看目标所对的视角可近似地认为是a,故放大率V=β/a。D S3微倾式水准仪的望远镜的放大率一般为28倍。 2、水准器 水准器是用来指示视准轴是否水平或仪器竖轴是否竖直的装置。水准器分为管水准器和圆水准器两种,管水准器又称为长水准器或水准管。管水准器用来指示视准轴是否水平,圆水准器用来指示竖轴是否竖直。 (1)管水准器 管水准器,是一纵向内壁磨成圆弧形(圆弧半径一般为7-20m)的玻璃管,管内装酒精、乙醚或二者 的混合液,加热融封冷却后留有一个气泡见2-5。由于气泡较轻,故恒处于管内最高位置。 水准管上一般刻有间隔为2m m的分划线,分划线的中点0,称为水准管零点(见2-5)。通过零点 作水准管圆弧的切线,称为水准管轴(2-5中的L-L)。当水准管的气泡中点与水准管零点重合时, 称为气泡居中;这时水准管轴L L处于水平位置。水准管圆弧2m m所对的圆心角τ(2-6),称为水准管分划值。用公式表示为: ″=?ρ″ (2-2-1)式中: ρ″=206265″; R-水准管圆弧半径,单位:m m。 式(2-2-1)说明圆弧的半径R愈大,角值τ″愈小,则水准管灵敏度愈高。安装在D S3级水准仪上的水准管,其分划值不大于20″/2m m。2.1水准测量原理及使用的仪器和工具
MSP430F5529测周法测量信号频率
利用MATLAB实现连续信号的采样与重构仿真课程设计
测量仪器和测量工具管理制度(条例清晰)
信号实验:连续信号的采样和恢复
精确的频率和时间测量-时基的选择
采样与恢复
时间间隔测量技术综述
建筑工程测量:水准测量仪器与工具
信号的采样与恢复
信号的采样与恢复
任务一 水准测量仪器和工具的使用工作页解读
用示波器测量信号的电压及频率
连续信号的采样和恢复
时间频率测量技术的发展与应用
测量交流信号的频率
时间频率测量技术的发展与应用
3水准测量的仪器和工具
相关主题
文本预览