
4
■
3
;■ U — ~z —i ! Eilril 二
■11' ■15'
5 ?‰
7
9
工业机器人应用
机器人示教单元使用
1.示教单元的认识
①[EMG.STO 円幵关 ...... 关闭伺服’机器人直接停止α
R [TBEN AHLE J 开关 ... 切换示教单元键的操作为有效或无效。
3) EnabIe S 关 .......... [有效/无效]开关2为有效时,放开本开关或强力押下的话,
伺服OFF 且动作中的机器人会直接停止II
4) 显示面板 .............. 显示机器人的状态泾各显示各IVlENUd
5状态显示灯 ............ 显示示教单元及机器人的状态。
δ'[F1][F2][F3HF4M ............ 执行显示在面板的功能显示部的功能*
7) [FUNCTION]^ ................ ”变更LCD 上显示的功能口
■8)[STOP]?1 ....... ............. 中断程序,且机器人减逮停止。
? [OVRD t ][OVRD I ]键…■使机器人的速度OVernde 变化。IOVRD I ]键按下则OVemde±ft.
[OVRD I J 键按下则OVernde 下降。
W [JOG 操作]键 ......... IXJc)G 模式便机器人动作。当輸入数字的值时,逬行谕入各个数字值。 ?[SERVOB≡ ..................... —边轻握Iilenableswitchl-边押上此键的话,机器人伺服ON D
?[MONITOR]键 ........ 按下此躍则,变成监视模式目显示监视MENU i
? [JOG]?t ........................ 按下此權则,变成JOG 摸武且显示JoG 画面°
?[孤手]犍 .............. 按下此饉则’变成抓手操作模式且显示肌手操作画面口 RESETM ..................... 解除异警。边押下此键再押下[EXE]键,执行程序重育。
:↑][i 1∏][→M ........ 移动光标到各个方向。
[CLEARS ..................... .在可以数字输入或文字输文时,押下此犍的话可以将1个文字删除。
[EXE]键 .............. 确定输入操作口另外,直接执行时,持续押下此键时,机器人动作口
[数孚V 文字]键 ....... 在可数字输入或文字输入时,押下此犍的话可以显示数字或文字°
2.使用示教单元调整机器人姿势
2.1在机器人控制器上电后使用钥匙将 MoDE 开关打到“ MANUAL ”位置,双手拿起,
先将示教单元背部的“ TB ENABLE ”按键按下。再用手将“ enable ”开关扳向一侧,直到
听到一声“卡嗒”为止。然后按下面板上的“SERVO ”键使机器人伺服电机开启, 此时“F3”
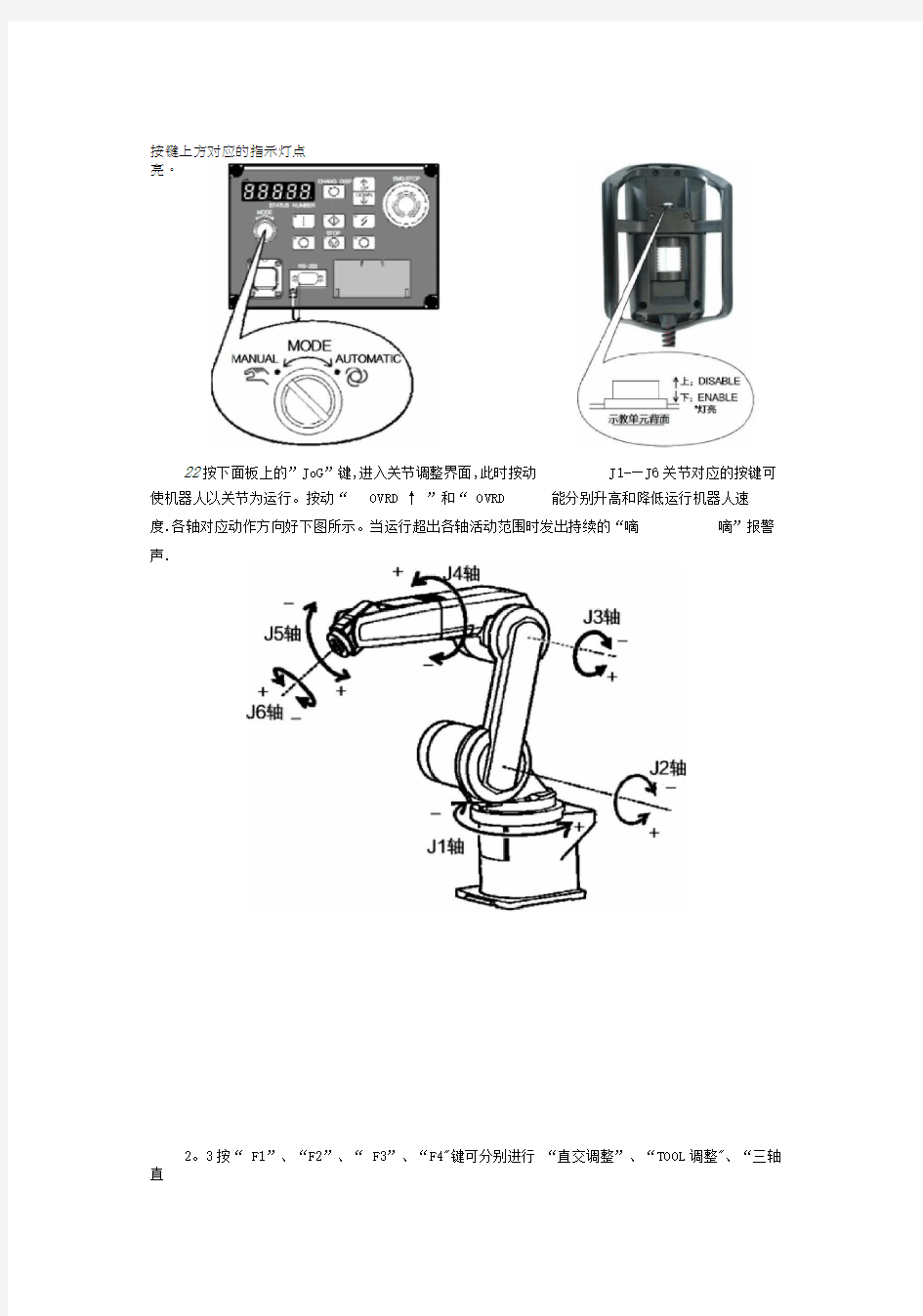
按键上方对应的指示灯点
亮。
22按下面板上的”JoG”键,进入关节调整界面,此时按动J1-—J6关节对应的按键可使机器人以关节为运行。按动“OVRD ↑ ”和“ OVRD 能分别升高和降低运行机器人速
度.各轴对应动作方向好下图所示。当运行超出各轴活动范围时发出持续的“嘀嘀”报警声.
2。3按“ F1”、“F2”、“ F3”、“F4"键可分别进行“直交调整”、“TOOL调整"、“三轴直
“圆桶调整”模式, 对应活动关系如下各图所示:
+ Z 交调整”
圆桶调整模式
2.4 在手动运行模式下按“ HAND ”进入手爪控制界面。在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT—900 ―― OUT-907 进行控制,与之相应的还有八
路输入信号 IN-900 ―― IN-907 ,以上各 I/O 信号可在程序中进行调用。
按键“ +C”和“―C” 对应“ OUT—900 "和“ OUT—901 ”
按键“ +B ”和“―B" 对应“ OUT—902 ”和“ OUT-903”
按键“ +A ”和“―A” 对应“ OUT—9O4"和“ OUT-9O5 ”
按键“ +Z”和“―Z” 对应“ OUT—906 "和“ OUT-9O7"
在气源接通后按下“― C”键,对应“ OUT—901 "输出信号,控制电磁阀动作使手爪夹
紧,对应的手爪夹紧磁性传感器点亮, 输入信号到“ IN—900 ”;按下“ +C”键,对应“OUT—
9OO”
输出信号,控制电磁阀动作使手爪张开.对应的手爪张开磁性传感器点亮,输入信号到
“IN—901 ".
3. 使用示教单元设置坐标点
3.1 先按照实训 2 的内容将机器人以关节调整模式将各关节调整到如下所列:
J1:0。00 J5:0.00
J2:—90.00 J6:0。00
J3:170.00
J4:0.00
3.2先按“ FUNCTION "功能键,再按“ F4”键退出调整界面.然后按下“F1”键进入