结构力学 第3章习题答案
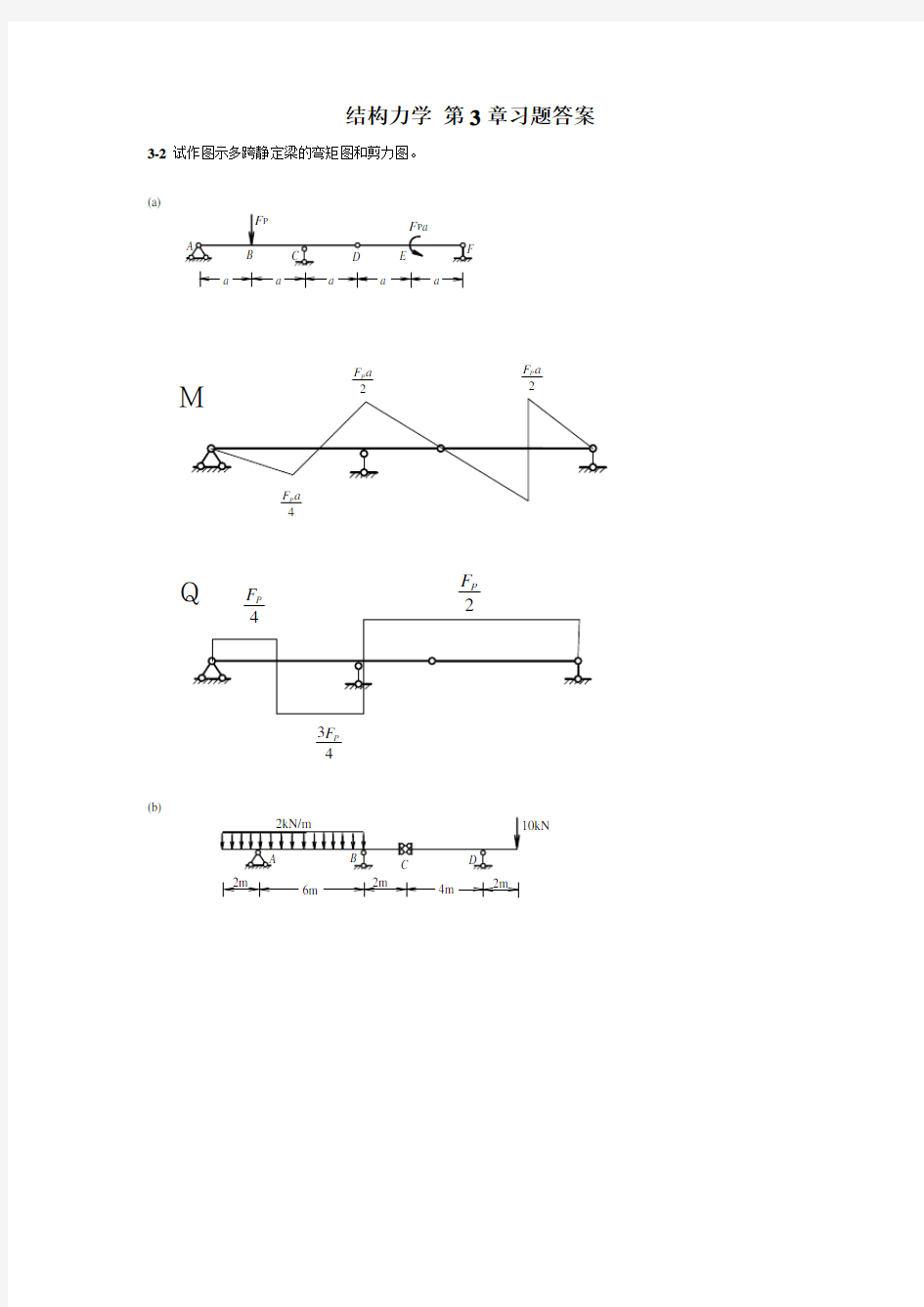
3-2 试作图示多跨静定梁的弯矩图和剪力图。 (a)
2
P F a 2
P F a
4
P F Q
34
P F 2
P F
(b)
a
a a
a
a
2m
6m
2m
4m
2m
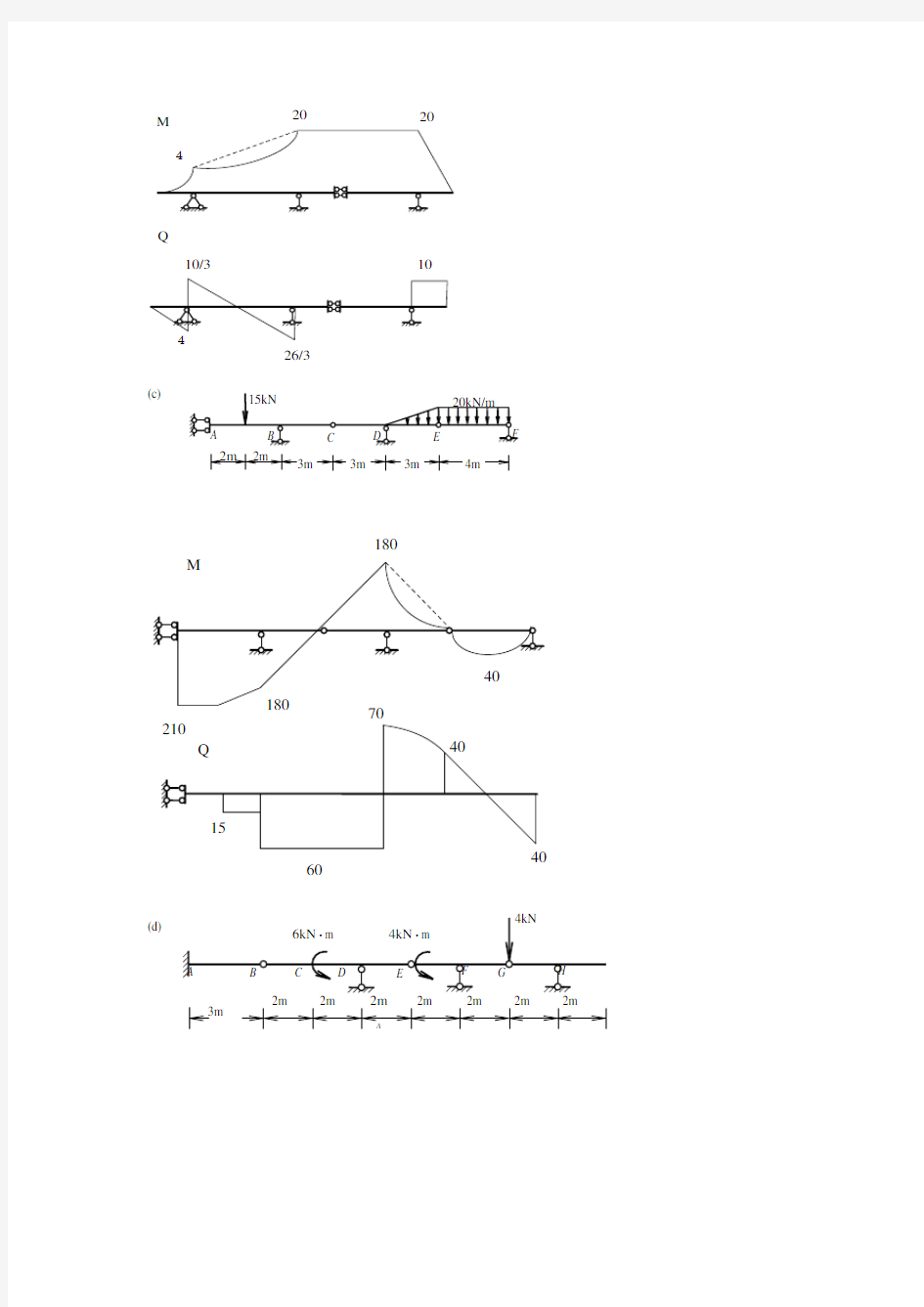
20
20
Q
10/3
26/3
10
(c)
180
60
(d)
3m
2m
2m
3m
3m
4m
3m
2m
2m
2m
2m 2m
2m
2m
7.5
5
1
4
4
8
2.5
2
4M
Q
3-3 试作图示刚架的内力图。 (a)
24
20
186
16
M
Q
18
(b)
4kN ·m
3m
3m
6m
1k N /m
2kN A C
B D
6m
10kN
3m
3m 40kN ·m
A
B
C D
30
30
30
110
10
Q
M 210
(c)
4
5
M
Q
(d)
3m
3m
6m
6m
2m 2m
4
4
4
4
4
4/3
2
M
Q
N
(e)
4
4
8
1
``
(f)
4m
4m
2m
3m
4m
22
22
20
M
3-4 试找出下列各弯矩图形的错误之处,并加以改正。 (a)
F P
(b)
(c)
(d)
(e)
(f)
F
3-5 试按图示梁的BC 跨跨中截面的弯矩与截面B 和C 的弯矩绝对值都相等的条件,确定E 、F 两铰的位置。
l
x l l
x
28
ql M
22
2
1()222116121618c B C BC C q ql M l x x qx x
M M M M ql ql x ql x l
=-+===∴=
∴=∴= 中F D
()2
l x -
3-6 试作图示刚架的弯矩和剪力图。 (a)
90
90
405
M
2B 209(4.53)645()0.5209459405,135()453135,0.5209900.520990
F F E E CF CD BA R R M R M M M ??-=?∴=↑=??-?==↑=?==??==??=对点求矩
1
4.25424213.5 1.50.252
5.75
A 72425 2.50.5()C 420.524 4.25()3.5(),0.25()5.75
2.1,24 4.25
3.752.5
E K B B B B A A E
F K M M R R H H V H Q Q =?-??==?+?=?+??=?→=-↓??+?=?→=→∴=↑=←=
==?-=左对点求矩:对点求矩:2 2.1
(c)
80/3
Q
8080
380,6160
33
30()
:(2023304)/2120():61201030420211320
()380()
3DA ED C C B B A M M H F V A V V V =?==?==←=??+?=↑?+?=?+??∴=-
↓∴=↑对点求矩对点求矩
(d)
8/3
4/3
88
4142
33
:41614284()
4
:441426()
3
8
(),0
3
DA
B B
B B
A A
M
A V V
C H H
H V
=?-??=
??+??=?→=↑
?-??=?→=←
∴=←=
对点求矩
对点求矩
(e)
2Fa
F
2Fa
2Fa
F F F
2F
----
+
2Fa2Fa
2Fa
M Q
02(),02
0322222
(),2()
4(),0
C B p E B F
B P H P F
H P F P
D P D
M V F M H V
M F a a H F a V a
H F V F
H F V
=→=↑=→=
=→?+?=?+?
∴=←=↓
∴=→=
∑∑
∑
(f)
进一步简化
B
H
I
H
8
:4(),4()
4(),4(),42810
B B
I I A
H KN V KN
H KN V KN M N m
=→=↓
=-←=-↑=?=?可知
84 (g)
2
a
qa
2
2
22
1.5()
2
1.50 1.5()
0,, 1.5
C C
A A
GF GH
H
qa
qa H a H qa
qa a H a H qa
H M qa M qa
+=?→=→
?+?=→=-←
===
对点求矩:
对F点求矩:
[0729]《结构力学》 1、桁架计算的结点法所选分离体包含几个结点 A. 单个 2、固定铰支座有几个约束反力分量 B. 2个 3、从一个无多余约束的几何不变体系上去除二元体后得到的新体系是 A. 无多余约束的几何不变体系 4、两刚片用三根延长线交于一点的链杆相连组成 A. 瞬变体系 5、定向滑动支座有几个约束反力分量 B. 2个 6、结构的刚度是指 C. 结构抵抗变形的能力 7、桁架计算的截面法所选分离体包含几个结点 B. 最少两个 8、对结构进行强度计算的目的,是为了保证结构 A. 既经济又安全 9、可动铰支座有几个约束反力分量 A. 1个 10、固定支座(固定端)有几个约束反力分量 C. 3个 11、改变荷载值的大小,三铰拱的合理拱轴线不变。 A.√ 12、多余约束是体系中不需要的约束。 B.× 13、复铰是连接三个或三个以上刚片的铰 A.√ 14、结构发生了变形必然会引起位移,结构有位移必然有变形发生。 B.×
15、如果梁的截面刚度是截面位置的函数,则它的位移不能用图乘法计算。 A.√ 16、一根连杆相当于一个约束。 A.√ 17、单铰是联接两个刚片的铰。 A.√ 18、连接四个刚片的复铰相当于四个约束。 B.× 19、虚功原理中的力状态和位移状态都是虚设的。 B.× 20、带拉杆三铰拱中拉杆的拉力等于无拉杆三铰拱的水平推力。 A.√ 21、瞬变体系在很小的荷载作用下会产生很大的内力,所以不能作为结构使用。 A.√ 22、一个无铰封闭框有三个多余约束。 A.√ 23、三铰拱的水平推力不仅与三铰的位置有关,还与拱轴线的形状有关。 B.× 24、三铰拱的主要受力特点是:在竖向荷载作用下产生水平反力。 A.√ 25、两根链杆的约束作用相当于一个单铰。 B.× 26、不能用图乘法求三铰拱的位移。 A.√ 27、零杆不受力,所以它是桁架中不需要的杆,可以撤除。 B.× 28、用图乘法可以求等刚度直杆体系的位移。 A.√ 29、连接四个刚片的复铰相当于四个约束。
同济大学朱慈勉 结构力学 第10章 结构动..习题答案 10-1 试说明动力荷载与移动荷载的区别。移动荷载是否可能产生动力效应? 10-2 试说明冲击荷载与突加荷载之间的区别。为何在作厂房动力分析时,吊车水平制动力可视作突加荷载? 10-3 什么是体系的动力自由度?它与几何构造分析中体系的自由度之间有何区别?如何确定体系的 动力自由度? 10-4 将无限自由度的振动问题转化为有限自由度有哪些方法?它们分别采用何种坐标? 10-5 试确定图示各体系的动力自由度,忽略弹性杆自身的质量。 (a) (b) EI 1=∞ EI m y ? 分布质量的刚度为无穷大,由广义坐标法可知,体系仅有两个振动自由度y ,?。 (c) (d) 在集中质量处施加刚性链杆以限制质量运动体系。有四个自由度。 10-6 建立单自由度体系的运动方程有哪些主要方法?它们的基本原理是什么? 10-7 单自由度体系当动力荷载不作用在质量上时,应如何建立运动方程? 10-8 图示结构横梁具有无限刚性和均布质量m ,B 处有一弹性支座(刚度系数为k ),C 处有一阻尼器(阻尼系数为 c ),梁上受三角形分布动力荷载作用,试用不同的方法建立体系的运动方程。
解:1)刚度法 该体系仅有一个自由度。 可设A 截面转角a 为坐标顺时针为正,此时作用于分布质量m 上的惯性力呈三角形分布。其端部集度 为.. ml a 。 取A 点隔离体,A 结点力矩为:.. .. 3 1212 3 3 I M ml a l l m a l =???= 由动力荷载引起的力矩为: ()()2 121233 t t q l l q l ?? = 由弹性恢复力所引起的弯矩为:. 2 133 la k l c a l ? ?+ 根据A 结点力矩平衡条件0I p s M M M ++=可得: ()3 .. . 3 2 2 13 9 3 t q l ka m a l l c a l + += 整理得:(). .. 33t q ka c a m a l l l ++ = 2)力法 . c α 解:取AC 杆转角为坐标,设在平衡位置附近发生虚位移α。根据几何关系,虚功方程为: (). .. 2 1110 3 3 3 l t q l l k l l l c m x xdx ααααααα- ? -?- ?=? 则同样有:(). .. 33t q ka c a m a l l l + + = 。 10-9 图示结构AD 和DF 杆具有无限刚性和均布质量m ,A 处转动弹簧铰的刚度系数为k θ,C 、E 处弹簧的刚度系数为k ,B 处阻尼器的阻尼系数为c ,试建立体系自由振动时的运动方程。 t )
东北农业大学网络教育学院 结构力学网上作业题参考答案(2015 更新版) 第一章绪论 一、填空 1、答案:杆件;板壳;实体;杆件 2、答案:从实际出发;分清主次,略去细节 3、答案:滚轴支座;铰支座;定向支座;固定支座 4、答案:相对移动;相对转动;力;力矩 5、答案:相对移动;相对转动;力;力矩 6、答案:平面杆件结构;空间杆件结构;静定结构;超静定结构 7、答案:恒载;活载;固定荷载;移动荷载 8、答案:静力荷载;动力荷载;集中荷载;分布荷载 第二章平面体系的几何组成分析 一、填空 1、答案:几何不变;无,有 2、答案:材料应变;几何形状和位置;W 0 3、答案:n 1;2n 3 4、答案:-12 5、答案:-3 6、答案:-10 二、选择 1、答案:A 2、答案:B 3、答案:A4 答案:A5、答案:A6、答案:A7、答案:D 三、判断 1、答案:X 2、答案:X 3、答案:“ 4、答案:X 5、答案:“ 6、答案:X 7、答案:“ 四、计算分析题 (一)试分析图示体系的几何组成,要求有分析过程。 1、取刚片AB与基础为研究对象,两者通过不交于一点的三根链杆1、 2、3相联,构成扩大基础I。 2、取扩大基础I与刚片BC为研究对象,两者通过铰B和不通过该铰的链杆4相联,构成扩大基础n。 3、取扩大基础II与刚片CD为研究对象,两者通过铰C和不通过该铰的链杆5相联,构成扩大
基础Ho 结论:该体系为无多余约束的几何不变体系。 (二)试分析图示体系的几何组成,要求有分析过程。 1取刚片AB与基础为研究对象,两者通过不交于一点的三根链杆1、2、3相联,构成扩大基 础I。 2、取扩大基础I与刚片CD为研究对象,两者通过不交于一点的三根链杆BC 4、5相联,构 成扩大基础Ho 结论:该体系为无多余约束的几何不变体系。 (三)试分析图示体系的几何组成,要求有分析过程。 1将铰结三角形ADF与铰结三角形BEG看作扩大刚片I、H。 2、取扩大刚片I、H为研究对象,两者通过铰C和不通过该铰的链杆DE相联,构成扩大刚片 ACBE O 3、取扩大刚片ACBE与基础为研究对象,两者通过不交于一点的三根链杆相联,扩大刚片ACBED 被固定于基础之上。 结论:该体系为无多余约束的几何不变体系。 (四)试分析图示体系的几何组成,要求有分析过程。 1将铰结三角形ADE与铰结三角形BCF t作扩大刚片I、H o 2、取扩大刚片I、H为研究对象,两者通过不交于一点的三根链杆AB CD EF相联,构成扩大刚片ABCDEF 3、取扩大刚片ABCDEF与基础为研究对象,两者通过不交于一点的三根链杆相联,扩大刚片ABCDE被固定于基础之上。 结论:该体系为无多余约束的几何不变体系。 (五)试分析图示体系的几何组成,要求有分析过程。 1将两端有铰的曲杆AC和BD等效为直链杆1和2o 2、取刚片CDE和基础为研究对象,两者通过交于一点的三根链杆1、2、3相联,则体系几何 可变,有多余约束。 结论:该体系为有多余约束的几何可变体系。 (六)试分析图示体系的几何组成,要求有分析过程。 1将铰结三角形ABD与铰结三角形ACE f作扩大刚片I、H。 2、取扩大刚片I、H和基础为研究对象,扩大刚片I、H通过铰A相联;扩大刚片I和基础 通过链杆1和DF相联,相当于虚铰于G点;扩大刚片H和基础通过链杆2和EF相联,相当于虚铰于H点,铰A、G H不在一条直线上,则扩大刚片I、H被固定于基础之上,且没有多余约束。 结论:该体系为无多余约束的几何不变体系。 (七)试分析图示体系的几何组成,要求有分析过程。 1、去掉由铰I 所联二元体,对体系的几何组成无影响。
同济大学朱慈勉结构力学第4章习题答案(2)4-8试绘制图示刚架指定最值的影响线。 ⑻ 知 lx5f/ + x76/ = \x(5d - x) M DC x _ x QDB = ld x,(0 以A为坐标原点,向右为x轴正方向。弯矩M以右侧受拉 为正 当0 (a) 上承荷载时: 以A点为坐标原点,句右力X轴正方向。F RA=1-^(T) 当0S*<8(C点以左财,取卜1截面左侧考虑由= 0 —> F N3 = |(10% — x) — (1 xl0|/2 = —i 当12幺;^20( D点以右)时, (1-—)x10 音 _ 5 由E M T = 0 4 F N3 =——22_ = F N3在CD之间的影响线用C点及£>的值。直线相连。 =0^1_^+当0 2x^8时,取1-1截面左侧分析由 F N2 sin45° =1知F N2=-x-y/2 由SF>0^F N1=-F3 + F N2CO s45、4-i 下承荷载情况可同样方法考虑 (b) = O^lx(8^/-x) = F RA x8d/^F RA =1-上承荷载时 当O 名师整理优秀资源 1:[论述题] 1、(本题10分)作图示结构的弯矩图。各杆EI相同,为常数。图 参考答案: 先对右下铰支座取整体矩平衡方程求得左上活动铰支座反力为0,再对整体竖向投影平衡求得右下铰支座竖向反力为0;再取右下直杆作为隔离体可求出右下铰支座水平反力为m/l(向右),回到整体水平投影平衡求出左下活动铰支座反力为m/l(向左)。反力求出后,即可绘出弯矩图如图所示。图 2:[填空题]2、(本题3分)力矩分配法适用于计算无结点超静定刚 架。参考答案:线位移 3:[单选题] 7、(本题3分)对称结构在对称荷载作用下,内力图为反对称的是 :弯矩图和剪力图D:轴力图C:剪力图B:弯矩图A 名师整理优秀资源 参考答案:B 4:[填空题]1、(本题5分)图示梁截面C的弯矩M = (以下侧受拉C 为正)图 参考答案:aF P5:[判断题]4、(本小题2分)静定结构受外界因素影响均产生内力,内力大小与杆件截面尺寸无关。参考答案:错误 6:[判断题]3、(本小题 2分)在温度变化与支座移动因素作用下静定与超静定结构都有内力。 参考答案:错误 7:[判断题]1、(本小题2分)在竖向均布荷载作用下,三铰拱的合理轴线为圆弧线。 参考答案:错误 8:[论述题]2、(本小题10分)试对下图所示体系进行几何组成分析。 参考答案:结论:无多余约束的几何不变体系。 9:[单选题]1、(本小题3分)力法的基本未知量是 A:结点角位移和线位移B:多余约束力C:广义位移D:广义力 参考答案:B 10:[单选题]2、(本小题3分)静定结构有温度变化时 A:无变形,无位移,无内力B:有变形,有位移.无内力 C:有变形.有位移,有内力D:无变形.有位移,无内力 参考答案:B 11:[判断题]2、(本小题2分)几何可变体系在任何荷载作用下都不能平衡。参考答案:错误 12:[判断题]5、(本小题2分) 按虚荷载原理所建立的虚功方程等价于几何方程。参考答案:正确 《结构力学》 1、桁架计算的结点法所选分离体包含几个结点 A. 单个 2、固定铰支座有几个约束反力分量 B. 2个 3、从一个无多余约束的几何不变体系上去除二元体后得到的新体系是 A. 无多余约束的几何不变体系 4、两刚片用三根延长线交于一点的链杆相连组成 A. 瞬变体系 5、定向滑动支座有几个约束反力分量 B. 2个 6、结构的刚度是指 C. 结构抵抗变形的能力 7、桁架计算的截面法所选分离体包含几个结点 B. 最少两个 8、对结构进行强度计算的目的,是为了保证结构 A. 既经济又安全 9、可动铰支座有几个约束反力分量 A. 1个 10、固定支座(固定端)有几个约束反力分量 C. 3个 11、改变荷载值的大小,三铰拱的合理拱轴线不变。 A.√ 12、多余约束是体系中不需要的约束。 B.× 13、复铰是连接三个或三个以上刚片的铰 A.√ 14、结构发生了变形必然会引起位移,结构有位移必然有变形发生。 B.× 15、如果梁的截面刚度是截面位置的函数,则它的位移不能用图乘法计算。 A.√ 16、一根连杆相当于一个约束。 A.√ 17、单铰是联接两个刚片的铰。 A.√ 18、连接四个刚片的复铰相当于四个约束。 B.× 19、虚功原理中的力状态和位移状态都是虚设的。 B.× 20、带拉杆三铰拱中拉杆的拉力等于无拉杆三铰拱的水平推力。 A.√ 21、瞬变体系在很小的荷载作用下会产生很大的内力,所以不能作为结构使用。 A.√ 22、一个无铰封闭框有三个多余约束。 A.√ 23、三铰拱的水平推力不仅与三铰的位置有关,还与拱轴线的形状有关。 B.× 24、三铰拱的主要受力特点是:在竖向荷载作用下产生水平反力。 A.√ 25、两根链杆的约束作用相当于一个单铰。 B.× 26、不能用图乘法求三铰拱的位移。 A.√ 27、零杆不受力,所以它是桁架中不需要的杆,可以撤除。 B.× 28、用图乘法可以求等刚度直杆体系的位移。 A.√ 最新版 同济大学朱慈勉 结构力学 第10章 结构动..习题答案 10-1 试说明动力荷载与移动荷载的区别。移动荷载是否可能产生动力效应? 10-2 试说明冲击荷载与突加荷载之间的区别。为何在作厂房动力分析时,吊车水平制动力可视作突加荷载? 10-3 什么是体系的动力自由度?它与几何构造分析中体系的自由度之间有何区别?如何确定体系的 动力自由度? 10-4 将无限自由度的振动问题转化为有限自由度有哪些方法?它们分别采用何种坐标? 10-5 试确定图示各体系的动力自由度,忽略弹性杆自身的质量。 (a) (b) EI 1=∞ EI m y ? 分布质量的刚度为无穷大,由广义坐标法可知,体系仅有两个振动自由度y ,?。 (c) (d) 在集中质量处施加刚性链杆以限制质量运动体系。有四个自由度。 10-6 建立单自由度体系的运动方程有哪些主要方法?它们的基本原理是什么? 10-7 单自由度体系当动力荷载不作用在质量上时,应如何建立运动方程? 10-8 图示结构横梁具有无限刚性和均布质量m,B处有一弹性支座(刚度系数为k),C处有一阻尼器(阻尼系数为c),梁上受三角形分布动力荷载作用,试用不同的方法建立体系的运动方程。 解:1)刚度法 该体系仅有一个自由度。 可设A截面转角a为坐标顺时针为正,此时作用于分布质量m上的惯性力呈三角形分布。其端部集度 为 .. ml a。 取A点隔离体,A结点力矩为: .... 3 121 233 I M ml a l l mal =???= 由动力荷载引起的力矩为: ()() 2 121 233 t t q l l q l ??= 由弹性恢复力所引起的弯矩为: . 2 1 33 la k l c al ??+ 根据A结点力矩平衡条件0 I p s M M M ++=可得: () 3 ... 322 1 393 t q l ka m al l c al ++= 整理得:() . ..3 3 t q ka c a m a l l l ++= 2)力法 t) 《结构力学》作业参考答案 一、判断题(将判断结果填入括弧内,以 √表示正确 ,以 × 表示错误。) 1.图示桁架结构中有3个杆件轴力为0 。(×) 2.图示悬臂梁截面A 的弯矩值是ql 2。 (×) l l A 3.静定多跨梁中基本部分、附属部分的划分和所承受的荷载无关。(√ ) 4.一般来说静定多跨梁的计算是先计算基本部分后计算附属部分。(× ) 5.用平衡条件能求出全部内力的结构是静定结构。( √ ) 6.求桁架内力时截面法所截取的隔离体包含两个或两个以上的结点。(√ ) 7.超静定结构的力法基本结构不是唯一的。(√) 8.在桁架结构中,杆件内力不是只有轴力。(×) 9.超静定结构由于支座位移可以产生内力。 (√ ) 10.超静定结构的内力和材料的性质无关。(× ) 11.力法典型方程的等号右端项不一定为0。 (√ ) 12.计算超静定结构的位移时,虚设力状态可以在力法的基本结构上设。(√) 13.用力矩分配法计算结构时,汇交于每一结点各杆端分配系数总和为1,则表明分配系 数的计算无错误。 (× ) 14.力矩分配法适用于所有超静定结构的计算。(×) 15.当AB 杆件刚度系数i S AB 3 时,杆件的B 端为定向支座。 (×) 二、单项选择题(在每小题的四个备选答案中选出一个正确答案,并将其代号填在题干后面的括号内。不选、错选或多选者,该题无分。) 1.图示简支梁中间截面的弯矩为( A ) F P q l A.82 ql B.42 ql C.22 ql D. 2 ql 2.超静定结构在荷载作用下产生的内力和刚度(B) A.无关 B.相对值有关 C.绝对值有关 D.相对值绝对值都有关 3.超静定结构的超静定次数等于结构中(B ) A.约束的数目 B.多余约束的数目 C.结点数 D.杆件数 4.力法典型方程是根据以下哪个条件得到的(C)。 A.结构的平衡条件B.结构的物理条件 C.多余约束处的位移协调条件D.同时满足A、B两个条件 5.图示对称结构作用反对称荷载,杆件EI为常量,利用对称性简化后的一半结构为(A )。 P P P P P P 6.超静定结构产生内力的原因有(D) A.荷载作用和温度变化 B.支座位移 C.制造误差 D.以上四种原因 7.超静定结构的超静定次数等于结构中(B) A.约束的数目 B.多余约束的数目 C.结点数 D.杆件数 8.图示超静定结构独立结点角位移的个数是(B ) A. 2 B. 3 1.1 结构动力计算与静力计算的主要区别是什么? 答:主要区别表现在:(1) 在动力分析中要计入惯性力,静力分析中无惯性力;(2) 在动力分析中,结构的内力、位移等是时间的函数,静力分析中则是不随时间变化的量;(3) 动力分析方法常与荷载类型有关,而静力分析方法一般与荷载类型无关。 1.2 什么是动力自由度,确定体系动力自由度的目的是什么? 答:确定体系在振动过程中任一时刻体系全部质量位置或变形形态所需要的独立参数的个数,称为体系的动力自由度(质点处的基本位移未知量)。 确定动力自由度的目的是:(1) 根据自由度的数目确定所需建立的方程个数(运动方程 数=自由度数),自由度不同所用的分析方法也不同;(2) 因为结构的动力响应(动力内力和 动位移)与结构的动力特性有密切关系,而动力特性又与质量的可能位置有关。 1.3 结构动力自由度与体系几何分析中的自由度有何区别? 答:二者的区别是:几何组成分析中的自由度是确定刚体系位置所需独立参数的数目,分析的目的是要确定体系能否发生刚体运动。结构动力分析自由度是确定结构上各质量位置所需的独立参数数目,分析的目的是要确定结构振动形状。 1.4 结构的动力特性一般指什么? 答:结构的动力特性是指:频率(周期)、振型和阻尼。动力特性是结构固有的,这是因为它们是由体系的基本参数(质量、刚度)所确定的、表征结构动力响应特性的量。动力特性不同,在振动中的响应特点亦不同。 1.5 什么是阻尼、阻尼力,产生阻尼的原因一般有哪些?什么是等效粘滞阻尼? 答:振动过程的能量耗散称为阻尼。 产生阻尼的原因主要有:材料的内摩擦、构件间接触面的摩擦、介质的阻力等等。当然,也包括结构中安装的各种阻尼器、耗能器。阻尼力是根据所假设的阻尼理论作用于质量上用于代替能量耗散的一种假想力。粘滞阻尼理论假定阻尼力与质量的速度成比例。 粘滞阻尼理论的优点是便于求解,但其缺点是与往往实际不符,为扬长避短,按能量等 效原则将实际的阻尼耗能换算成粘滞阻尼理论的相关参数,这种阻尼假设称为等效粘滞阻尼。 1.6 采用集中质量法、广义位移法(坐标法)和有限元法都可使无限自由度体系简化为有限自由度体系,它们采用的手法有何不同? 答:集中质量法:将结构的分布质量按一定规则集中到结构的某个或某些位置上,认为其他地方没有质量。质量集中后,结构杆件仍具有可变形性质,称为“无重杆”。 广义坐标法:在数学中常采用级数展开法求解微分方程,在结构动力分析中,也可采用 相同的方法求解,这就是广义坐标法的理论依据。所假设的形状曲线数目代表在这个理想化形式中所考虑的自由度个数。考虑了质点间均匀分布质量的影响(形状函数),一般来说,对于一个给定自由度数目的动力分析,用理想化的形状函数法比用集中质量法更为精确。有限元法:有限元法可以看成是广义坐标法的一种特殊的应用。一般的广义坐标中,广 义坐标是形函数的幅值,有时没有明确的物理意义,并且在广义坐标中,形状函数是针对整个结构定义的。而有限元法则采用具有明确物理意义的参数作为广义坐标,且形函数是定义在分片区域的。在有限元分析中,形函数被称为插值函数。 综上所述,有限元法综合了集中质量法和广义坐标法的特点:(l) 与广义坐标法相似, 有限元法采用了形函数的概念。但不同于广义坐标法在整体结构上插值(即定义形函数),而是采用了分片的插值,因此形函数的表达式(形状)可以相对简单。(2) 与集中质量法相比,有限元法中的广义坐标也采用了真实的物理量,具有直接、直观的优点,这与集中质量 第六章 习 题 6-1 试确定图示结构的超静定次数。 (a) (b) (c) (d) (e) (f) (g) 所有结点均为全铰结点 2次超静定 6次超静定 4次超静定 3次超静定 去掉复铰,可减去2(4-1)=6个约束,沿I-I 截面断开,减去三个约束,故为9次超静定 沿图示各截面断开,为21次超静定 刚片I 与大地组成静定结构,刚片II 只需通过一根链杆和一个铰与I 连接即可,故为4次超静定 (h) 6-2 试回答:结构的超静定次数与力法基本结构的选择是否有关?力法方程有何物理意义? 6-3 试用力法计算图示超静定梁,并绘出M 、F Q 图。 (a) 解: 上图= l 1M p M 01111=?+p X δ 其中: EI l l l l l l l EI l l l l EI 81142323326232323332113 11=??? ????+??+???+??? ??????=δEI l F l lF l lF EI l p p p p 8173323222632 31-=??? ???-??-?=? 0817******* =-EI l F X EI l p p F X 2 1 1= p M X M M +=11 l F p 6 1 l F p 6 1 2l 3 l 3 题目有错误,为可变体系。 + lF 2 1=1 M 图 p Q X Q Q +=11 p F 2 1 p F 2 (b) 解: 基本结构为: l 1M l l 2M l F p 2 1 p M l F p 3 1 ???? ?=?++=?++00 22 221211212111p p X X X X δδδδ p M X M X M M ++=2211 p Q X Q X Q Q ++=2211 6-4 试用力法计算图示结构,并绘其内力图。 (a) l 2 l 2 l 2 l l 2 Q 图 12 概念题 结构动力计算与静力计算的主要区别是什么 答:主要区别表现在:(1) 在动力分析中要计入惯性力,静力分析中无惯性力;(2) 在动力 分析中,结构的内力、位移等是时间的函数,静力分析中则是不随时间变化的量;(3) 动力 分析方法常与荷载类型有关,而静力分析方法一般与荷载类型无关。 什么是动力自由度,确定体系动力自由度的目的是什么 答:确定体系在振动过程中任一时刻体系全部质量位置或变形形态所需要的独立参数的个 数,称为体系的动力自由度(质点处的基本位移未知量)。 确定动力自由度的目的是:(1) 根据自由度的数目确定所需建立的方程个数(运动方程 数=自由度数),自由度不同所用的分析方法也不同;(2) 因为结构的动力响应(动力内力和 动位移)与结构的动力特性有密切关系,而动力特性又与质量的可能位置有关。 结构动力自由度与体系几何分析中的自由度有何区别 答:二者的区别是:几何组成分析中的自由度是确定刚体系位置所需独立参数的数目,分析 的目的是要确定体系能否发生刚体运动。结构动力分析自由度是确定结构上各质量位置所需 的独立参数数目,分析的目的是 要确定结构振动形状。 结构的动力特性一般指什么答:结构的动力特性是指:频率(周期)、振型和阻尼。动力特性是结构固有的,这是因为 它们是由体系的基本参数(质量、刚度)所确定的、表征结构动力响应特性的量。动力特性 不同,在振动中的响应特点亦不同。 什么是阻尼、阻尼力,产生阻尼的原因一般有哪些什么是等效粘滞阻尼 答:振动过程的能量耗散称为阻尼。 产生阻尼的原因主要有:材料的内摩擦、构件间接触面的摩擦、介质的阻力等等。当然,也包括结构中安装的各种阻尼器、耗能器。阻尼力是根据所假设的阻尼理论作用于质量上用 于代替能量耗散的一种假想力。粘滞阻尼理论假定阻尼力与质量的速度成比例。 粘滞阻尼理论的优点是便于求解,但其缺点是与往往实际不符,为扬长避短,按能量等 效原则将实际的阻尼耗能换算成粘滞阻尼理论的相关参数,这种阻尼假设称为等效粘滞阻 尼。 采用集中质量法、广义位移法(坐标法)和有限元法都可使无限自由度体系简化为有限 自由度体系,它们采用的手法有何不同 答:集中质量法:将结构的分布 精品文档 [0729]《结构力学》 1、桁架计算的结点法所选分离体包含几个结点 A. 单个 2、固定铰支座有几个约束反力分量 B. 2个 3、从一个无多余约束的几何不变体系上去除二元体后得到的新体系是 A. 无多余约束的几何不变体系 4、两刚片用三根延长线交于一点的链杆相连组成 A. 瞬变体系 5、定向滑动支座有几个约束反力分量 B. 2个 6、结构的刚度是指 C. 结构抵抗变形的能力 7、桁架计算的截面法所选分离体包含几个结点 B. 最少两个 8、对结构进行强度计算的目的,是为了保证结构 A. 既经济又安全 9、可动铰支座有几个约束反力分量 A. 1个 10、固定支座(固定端)有几个约束反力分量 C. 3个 11、改变荷载值的大小,三铰拱的合理拱轴线不变。 A.√ 12、多余约束是体系中不需要的约束。 B.× 13、复铰是连接三个或三个以上刚片的铰 A.√ 14、结构发生了变形必然会引起位移,结构有位移必然有变形发生。 B.× 精品文档. 精品文档 15、如果梁的截面刚度是截面位置的函数,则它的位移不能用图乘法计算。 A.√ 16、一根连杆相当于一个约束。 A.√ 17、单铰是联接两个刚片的铰。 A.√ 18、连接四个刚片的复铰相当于四个约束。 B.× 19、虚功原理中的力状态和位移状态都是虚设的。 B.× 20、带拉杆三铰拱中拉杆的拉力等于无拉杆三铰拱的水平推力。 A.√ 21、瞬变体系在很小的荷载作用下会产生很大的内力,所以不能作为结构使用。 A.√ 22、一个无铰封闭框有三个多余约束。 A.√ 23、三铰拱的水平推力不仅与三铰的位置有关,还与拱轴线的形状有关。 B.× 24、三铰拱的主要受力特点是:在竖向荷载作用下产生水平反力。 A.√ 25、两根链杆的约束作用相当于一个单铰。 B.× 26、不能用图乘法求三铰拱的位移。 A.√ 27、零杆不受力,所以它是桁架中不需要的杆,可以撤除。 B.× 第六章 习 题 6-1 试确定图示结构的超静定次数。 (a) (b) (d) (f) (g) 所有结点均为全铰结点 2次超静定 6次超静定 4次超静定 3次超静定 去掉复铰,可减去2(4-1)=6个约束,沿I-I 截面断开,减去三个约束,故为9次超静定 沿图示各截面断开,为21次超静定 刚片I 与大地组成静定结构,刚片II 只需通过一根链杆和一个铰与I 连接即可,故为4次超静定 (h) 6-2 试回答:结构的超静定次数与力法基本结构的选择是否有关力法方程有何物理意义 6-3 试用力法计算图示超静定梁,并绘出M 、F Q 图。 (a) 解: 上图= l 1M p M 其中: EI l l l l l l l EI l l l l EI 81142323326232323332113 11=??? ????+??+???+??? ??????=δEI l F l lF l lF EI l p p p p 8173323222632 31-= ??? ???-??-?=? 0817******* =-EI l F X EI l p p F X 2 1 1= p M X M M +=11 l F p 6 1 l F p 6 1 p Q X Q Q +=11 2l 3 l 3 题目有错误,为可变体系。 + lF 2 1=1 M 图 p F 2 1 p F 2 (b) 解: 基本结构为: l 1M l l 2M l F p 2 1 p M l F p 3 1 ???? ?=?++=?++00 22 221211212111p p X X X X δδδδ p M X M X M M ++=2211 p Q X Q X Q Q ++=2211 6-4 试用力法计算图示结构,并绘其内力图。 (a) 3m 6m 6m l 2 l 2 l 2 l l 2 Q 图 12 2014年秋结构力学0729第一次作业 1、简述结构几何组成分析的目的。 答: 1、研究结构正确的连接方式,确保所设计的结构能承受并传递荷载,维持平衡,不至 于发生刚体运动。 2、在结构计算时,可根据其几何组成情况,选择适当的计算方法;分析其组成顺序, 寻找简便的解题途径。 2、简述多跨静定梁的特点。 答:1 多跨静定梁的几何组成特点从几何构造看,多跨静定梁由基本部分及附属部分组成,将各段梁之间的约束解除仍能 平衡其上外力的称为基本部分,不能独立平衡其上外力的称为附属部分,附属部分是支承在 基本部分的。 2 多跨静定梁的受力特点由构造层次图可得到多跨静定梁的受力特点为:作用在基本部分的力不影响附属部分,作用在附属部分的力反过来影响基本部分。因此, 多跨静定梁的解题顺序为先附属部分后基本部分。为了更好地分析梁的受力,往往先画出能 够表示多跨静定梁各个部分相互依赖关系的层次图 3 多跨静定梁的计算特点为了避免解联立方程,计算多跨静定梁时,应遵守以下原则: 先计算附属部分后计算基本部分。将附属部分的支座反力反向指向,作用在基本部分上, 把多跨梁拆成多个单跨梁,依次解决。将单跨梁的内力图连在一起,就是多跨梁的内力图。 弯矩图和剪力图的画法同单跨梁相同。 1、力法和位移法既能用于求超静定结构的内力,又能用于求静定结构的内力。(错误 2、静定结构在非荷载外因(支座移动、温度改变、制造误差)作用下,不产生内力,但产 生位移。正确 3、图示结构,去掉其中任意两根支座链杆后余下部分都可作为力法计算的基本体系。图 错误 4、体系几何组成分析中,链杆都能看作刚片,刚片有时能看作链杆,有时不能看作链杆。错 误 5、体系的多余约束对体系的计算自由度、自由度及受力状态都没有影响,故称多余约束。错 误 6、不受外力作用的任何结构,内力一定为零。(错误 7、引起结构变形的因素只有三种:荷载作用、温度改变和支座位移。(错误 8、虚位移原理中的虚功方程等价于静力平衡方程,虚力原理中虚功方程等价于变形协调方 第9章超静定结构的实用计算方法与概念分析习题答案 9-1 试说出何为杆端转动刚度、弯矩分配系数和传递系数,为什么弯矩分配法一般只能用于无结点线位移的梁和刚架计算。 9-2 试用弯矩分配法计算图示梁和刚架,作出M 图,并求刚结点B 的转角φB 。 解:设EI=6,则5.1,1==BC AB i i 53 .05 .13145.1347 .05 .131414=?+??= =?+??=BC BA μμ 结点 A B C 杆端 AB BA BC 分配系数 固端 0.47 0.53 绞支 固端弯矩 -60 60 -30 0 分配传递 -7.05 -14.1 -15.9 0 最后弯矩 -67.05 45.9 -45.9 ()()() 逆时针方向 2 15.216005.6721609.4522 131m KN EI EI m M m M i AB AB BA BA B ?- =??? ???+---= ? ? ? ?? ?-- -=θ (b) 解:设EI=9,则 3 ,31,1====BE BD BC AB i i i i 6m 3m 3m 2m 6m 2m 12 .01 41333331 316.01 41333331 436 .01 41333333 3=?+?+?+??= =?+?+?+??==?+?+?+??==BC BA BE BD μμμμ 结点 A B C 杆端 AB BA BC B D B E 分配系数 固端 0.16 0.12 0.36 0.36 绞支 固端弯矩 0 0 0 45 -90 0 分配传递 3.6 7.2 5.4 16.2 16.2 0 最后弯矩 3.6 7.2 5.4 61.2 -73.8 ()()() 顺时针方向 2 2.1606.32102.732 131m KN EI EI m M m M i AB AB BA BA B ?= ??? ???---=? ? ? ?? ? -- -=θ 9-3 试用弯矩分配法计算图示刚架,并作出M 图。 (a) 解:B为角位移节点 设EI=8,则1==BC AB i i ,5.0==BC BA μμ 固端弯矩()m KN l b l Pab M BA ?=????= += 488 212 443222 2 m KN l M BC ?-=?+ - =58262 18 92 结点力偶直接分配时不变号 结点 A B C 杆端 AB BA BC 分配系数 铰接 0.5 0.5 固端弯矩 0 48 -58 12 分配传递 50 50 5 5 12 4m 4m 8m 2m 1:[论述题] 1、(本题10分)作图示结构的弯矩图。各杆EI相同,为常数。图 参考答案: 先对右下铰支座取整体矩平衡方程求得左上活动铰支座反力为0,再对整体竖向投影平衡求得右下铰支座竖向反力为0;再取右下直杆作为隔离体可求出右下铰支座水平反力为m/l(向右),回到整体水平投影平衡求出左下活动铰支座反力为m/l(向左)。反力求出后,即可绘出弯矩图如图所示。图 2:[填空题]2、(本题3分)力矩分配法适用于计算无结点超静定刚架。 参考答案:线位移 3:[单选题] 7、(本题3分)对称结构在对称荷载作用下,内力图为反对称的是 A:弯矩图B:剪力图C:轴力图D:弯矩图和剪力图 参考答案:B 4:[填空题]1、(本题5分)图示梁截面C的弯矩M C = (以下侧受拉为正)图 参考答案:F P a 5:[判断题]4、(本小题2分)静定结构受外界因素影响均产生内力,内力大小与杆件截面尺寸无关。 参考答案:错误 6:[判断题]3、(本小题 2分)在温度变化与支座移动因素作用下静定与超静定结构都有内力。 参考答案:错误 7:[判断题]1、(本小题2分)在竖向均布荷载作用下,三铰拱的合理轴线为圆弧线。 参考答案:错误 8:[论述题]2、(本小题10分)试对下图所示体系进行几何组成分析。 参考答案:结论:无多余约束的几何不变体系。 9:[单选题]1、(本小题3分)力法的基本未知量是 A:结点角位移和线位移B:多余约束力C:广义位移D:广义力 参考答案:B 10:[单选题]2、(本小题3分)静定结构有温度变化时 A:无变形,无位移,无内力B:有变形,有位移.无内力 C:有变形.有位移,有内力D:无变形.有位移,无内力 参考答案:B 11:[判断题]2、(本小题2分)几何可变体系在任何荷载作用下都不能平衡。 参考答案:错误 12:[判断题]5、(本小题2分) 按虚荷载原理所建立的虚功方程等价于几何方程。 参考答案:正确 13:[单选题]3、(本小题3分)变形体虚功原理 A:只适用于静定结构B:只适用于线弹性体C:只适用于超静定结构 第一章绪论 一、教学内容 结构力学的基本概念和基本学习方法。 二、学习目标 ?了解结构力学的基本研究对象、方法和学科内容。 ?明确结构计算简图的概念及几种简化方法,进一步理解结构体系、结点、支座的形式和内涵。 ?理解荷载和结构的分类形式。 在认真学习方法论——学习方法的基础上,对学习结构力学有一个正确的认识,逐步形成一个行之有效的学习方法,提高学习效率和效果。 三、本章目录 §1-1 结构力学的学科内容和教学要求 §1-2 结构的计算简图及简化要点 §1-3 杆件结构的分类 §1-4 荷载的分类 §1-5 方法论(1)——学习方法(1) §1-6 方法论(1)——学习方法(2) §1-7 方法论(1)——学习方法(3) §1-1 结构力学的学科内容和教学要求 1. 结构 建筑物和工程设施中承受、传递荷载而起骨架作用的部分称为工程结构,简称结构。例如房屋中的梁柱体系,水工建筑物中的闸门和水坝,公路和铁路上的桥梁和隧洞等。 从几何的角度,结构分为如表1.1.1所示的三类: 表1.1.1 结构的分类 2. 结构力学的研究内容和方法 结构力学与理论力学、材料力学、弹塑性力学有着密切的关系。 理论力学着重讨论物体机械运动的基本规律,而其他三门力学着重讨论结构及其构件的强度、刚度、稳定性和动力反应等问题。 其中材料力学以单个杆件为主要研究对象,结构力学以杆件结构为主要研究对象,弹塑性力学以实体结构和板壳结构为主要研究对象。学习好理论力学和材料力学是学习结构力学的基础和前提。 结构力学的任务是根据力学原理研究外力和其他外界因素作用下结构的内力和变形,结构的强度、刚度、稳定性和动力反应,以及结构的几何组成规律。包括以下三方面内容: (1) 讨论结构的组成规律和合理形式,以及结构计算简图的合理选择; (2) 讨论结构内力和变形的计算方法,进行结构的强度和刚度的验算; (3) 讨论结构的稳定性以及在动力荷载作用下的结构反应。 结构力学问题的研究手段包含理论分析、实验研究和数值计算,本课程只进行理论分析和数值计算。结构力学的计算方法很多,但都要考虑以下三方面的条件: (1) 力系的平衡条件或运动条件。 (2) 变形的几何连续条件。 (3) 应力与变形间的物理条件(本构方程)。 利用以上三方面进行计算的,又称为“平衡-几何”解法。 采用虚功和能量形式来表述时候,则称为“虚功-能量”解法。 随着计算机的进一步发展和应用,结构力学的计算由过去的手算正逐步由计算机所代替,本课程的特点是将结构力学求解器集成到网络中,主要利用求解器进行计算和画图。 结构力学第7章位移法习题答案 7-1 试确定图示结构的位移法基本未知量数目,并绘出基本结构。 (a) (b) (c) 1个角位移3个角位移,1个线位移4个角位移,3个线位移 (d) (e) (f) 3个角位移,1个线位移2个线位移3个角位移,2个线位移 (g) (h) (i) 一个角位移,一个线位移一个角位移,一个线位移三个角位移,一个线位移7-2 试回答:位移法基本未知量选取的原则是什么?为何将这些基本未知位移称为关键位移?是否可以将静定部分的结点位移也选作位移法未知量? 7-3 试说出位移法方程的物理意义,并说明位移法中是如何运用变形协调条件的。 7-4 试回答:若考虑刚架杆件的轴向变形,位移法基本未知量的数目有无变化?如何变化? 7-5 试用位移法计算图示结构,并绘出其内力图。 (a) 解:(1)确定基本未知量和基本结构 有一个角位移未知量,基本结构见图。 Z 1M 图 (2)位移法典型方程 11110 p r Z R += (3)确定系数并解方程 i ql Z ql iZ ql R i r p 24031831 ,82 12 12 111= =-∴-== (4)画M 图 M 图 (b) 4m 4m 4m 解:(1)确定基本未知量 1个角位移未知量,各弯矩图如下 1Z =1M 图 3 2 EI p M 图 (2)位移法典型方程 11110 p r Z R += (3)确定系数并解方程 1115 ,352 p r EI R = =- 15 3502 EIZ -= 114Z EI = (4)画M 图 () KN m M ?图 (c) 解:(1)确定基本未知量 一个线位移未知量,各种M 图如下 6m 6m 9m 1.1 结构动力计算和静力计算的主要区别是什么? 答:主要区别表现在:(1) 在动力分析中要计入惯性力,静力分析中无惯性力;(2) 在动力分析中,结构的内力、位移等是时间的函数,静力分析中则是不随时间变化的量;(3) 动力分析方法常和荷载类型有关,而静力分析方法一般和荷载类型无关。 1.2 什么是动力自由度,确定体系动力自由度的目的是什么? 答:确定体系在振动过程中任一时刻体系全部质量位置或变形形态所需要的独立参数的个数,称为体系的动力自由度(质点处的基本位移未知量)。 确定动力自由度的目的是:(1) 根据自由度的数目确定所需建立的方程个数(运动方程 数=自由度数),自由度不同所用的分析方法也不同;(2) 因为结构的动力响应(动力内力和 动位移)和结构的动力特性有密切关系,而动力特性又和质量的可能位置有关。 1.3 结构动力自由度和体系几何分析中的自由度有何区别? 答:二者的区别是:几何组成分析中的自由度是确定刚体系位置所需独立参数的数目,分析的目的是要确定体系能否发生刚体运动。结构动力分析自由度是确定结构上各质量位置所需的独立参数数目,分析的目的是要确定结构振动形状。 1.4 结构的动力特性一般指什么? 答:结构的动力特性是指:频率(周期)、振型和阻尼。动力特性是结构固有的,这是因为它们是由体系的基本参数(质量、刚度)所确定的、表征结构动力响应特性的量。动力特性不同,在振动中的响应特点亦不同。 1.5 什么是阻尼、阻尼力,产生阻尼的原因一般有哪些?什么是等效粘滞阻尼? 答:振动过程的能量耗散称为阻尼。 产生阻尼的原因主要有:材料的内摩擦、构件间接触面的摩擦、介质的阻力等等。当然,也包括结构中安装的各种阻尼器、耗能器。阻尼力是根据所假设的阻尼理论作用于质量上用于代替能量耗散的一种假想力。粘滞阻尼理论假定阻尼力和质量的速度成比例。 粘滞阻尼理论的优点是便于求解,但其缺点是和往往实际不符,为扬长避短,按能量等 效原则将实际的阻尼耗能换算成粘滞阻尼理论的相关参数,这种阻尼假设称为等效粘滞阻尼。 1.6 采用集中质量法、广义位移法(坐标法)和有限元法都可使无限自由度体系简化为有限自由度体系,它们采用的手法有何不同? 答:集中质量法:将结构的分布质量按一定规则集中到结构的某个或某些位置上,认为其他地方没有质量。质量集中后,结构杆件仍具有可变形性质,称为“无重杆”。 广义坐标法:在数学中常采用级数展开法求解微分方程,在结构动力分析中,也可采用 相同的方法求解,这就是广义坐标法的理论依据。所假设的形状曲线数目代表在这个理想化形式中所考虑的自由度个数。考虑了质点间均匀分布质量的影响(形状函数),一般来说,对于一个给定自由度数目的动力分析,用理想化的形状函数法比用集中质量法更为精确。有限元法:有限元法可以看成是广义坐标法的一种特殊的使用。一般的广义坐标中,广 义坐标是形函数的幅值,有时没有明确的物理意义,并且在广义坐标中,形状函数是针对整个结构定义的。而有限元法则采用具有明确物理意义的参数作为广义坐标,且形函数是定义在分片区域的。在有限元分析中,形函数被称为插值函数。 综上所述,有限元法综合了集中质量法和广义坐标法的特点:(l) 和广义坐标法相似, 有限元法采用了形函数的概念。但不同于广义坐标法在整体结构上插值(即定义形函数),而是采用了分片的插值,因此形函数的表达式(形状)可以相对简单。(2) 和集中质量法相比,有限元法中的广义坐标也采用了真实的物理量,具有直接、直观的优点,这和集中质量结构力学全部作业答案 2
《结构力学》作业复习答案
同济大学朱慈勉结构力学第10章结构动习题答案
结构力学试题及参考答案
最新结构力学2课后概念题答案(龙驭球)
同济大学 朱慈勉版 结构力学 课后答案(下)汇编
结构力学2课后概念题答案(龙驭球)
最新结构力学作业答案
同济大学 朱慈勉版 结构力学 课后答案
秋季0729结构力学作业及练习答案教学内容
结构力学 朱慈勉 第9章课后答案全解
结构力学全部作业答案 (2)
结构力学-龙驭球复习
结构力学 朱慈勉 第7章课后答案全解
结构力学2课后概念题答案(龙驭球)
相关主题
文本预览