实验二 自动分拣系统仿真
1.实验目的
通过建立一个传送带系统,学习Flexsim 提供的运动系统的定义;学习Flexsim 提供的conveyor 系统建模;进一步学习模型调整与系统优化;
2.实验内容
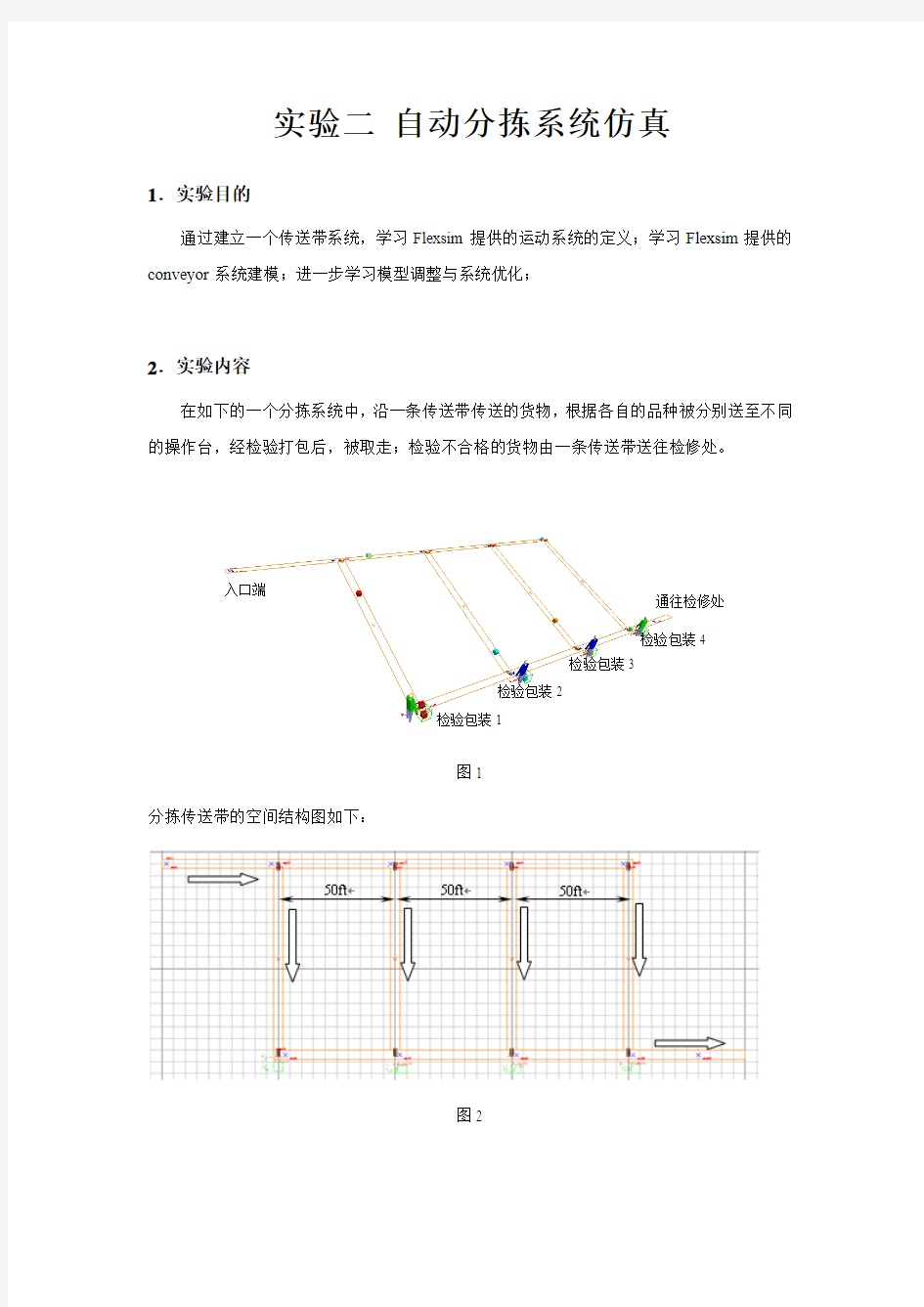
在如下的一个分拣系统中,沿一条传送带传送的货物,根据各自的品种被分别送至不同的操作台,经检验打包后,被取走;检验不合格的货物由一条传送带送往检修处。
图1
分拣传送带的空间结构图如下:
图2
入口端 通往检修处
检验包装1
检验包装2
检验包装3
检验包装4
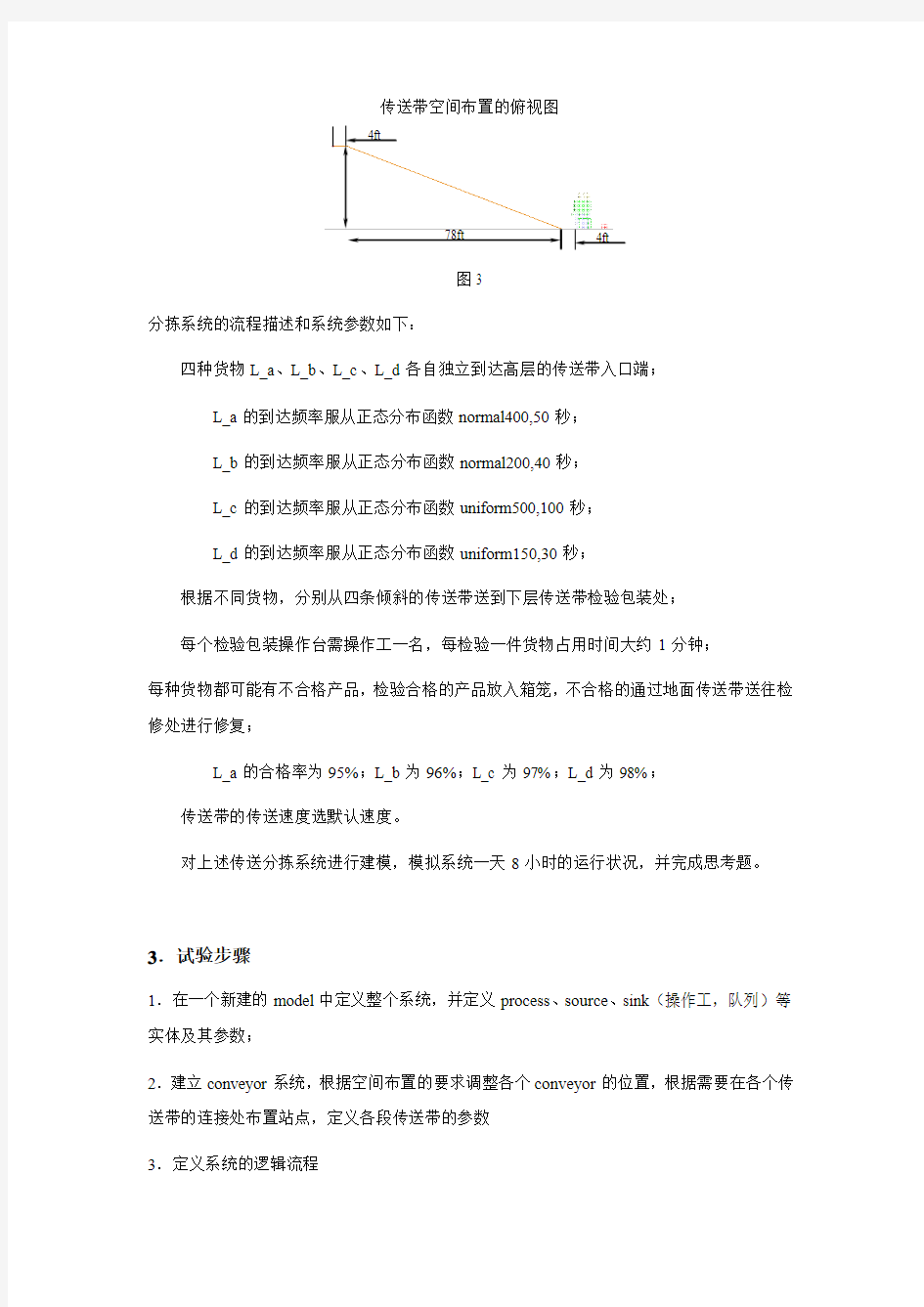
传送带空间布置的俯视图
图3
分拣系统的流程描述和系统参数如下:
四种货物L_a 、L_b 、L_c 、L_d 各自独立到达高层的传送带入口端;
L_a 的到达频率服从正态分布函数normal400,50秒;
L_b 的到达频率服从正态分布函数normal200,40秒;
L_c 的到达频率服从正态分布函数uniform500,100秒; L_d 的到达频率服从正态分布函数uniform150,30秒;
根据不同货物,分别从四条倾斜的传送带送到下层传送带检验包装处;
每个检验包装操作台需操作工一名,每检验一件货物占用时间大约1分钟;
每种货物都可能有不合格产品,检验合格的产品放入箱笼,不合格的通过地面传送带送往检修处进行修复;
L_a 的合格率为95%;L_b 为96%;L_c 为97%;L_d 为98%;
传送带的传送速度选默认速度。
对上述传送分拣系统进行建模,模拟系统一天8小时的运行状况,并完成思考题。
3.试验步骤
1.在一个新建的model 中定义整个系统,并定义process 、source 、sink (操作工,队列)等实体及其参数;
2.建立conveyor 系统,根据空间布置的要求调整各个conveyor 的位置,根据需要在各个传送带的连接处布置站点,定义各段传送带的参数
3.定义系统的逻辑流程
4.运行调整模型,知道模型按照实际系统流程正确运行
5.运行模型,得到数据和图表等多种结果输出;
6.根据结果输出对系统进行分析
四.思考题
1.该分拣系统一天的总货物流量约为多少?
2.按照目前的配置,该系统能够承受的最大日流量是多少?
3.如果你是该系统的主管,你怎样调整这个系统的物流安排和人员配置
4.比较24小时工作制和8小时工作制设定模型运行,看是否是简单的大约3倍的关系?是否能发现不同的现象?连续运行一个月,情况又如何?试说明仿真长度对系统分析的影响。5.如果该系统中合格的货物被操作工放置在箱笼中,累计每20个打一包送走,如何实现这样的逻辑
6.在source定义窗口中改变source到达系统的随机分布函数种类和参数,观察仿真结果的变化,结合有关数学参考书,给出数学上的解释。
帮助与提示
在按照空间结构布置传送带的时候,可以右键单击传送带,选择parameters栏,改变栏中Layout中的一些参数来调整传送带的尺寸、形状以及方向。
由于在系统中,需要根据不同的货物,分别从四条倾斜的传送带送到下层传送带检验包装处。为了实现这个功能,需要对传送带flowitem 的输出端口进行相应的设置,按照flowitem 不同的type输送到传送带不同的输出端口。
4种不同的货物都有自己的检验合格率。每个货物进行检验之后,不合格的产品要进入检修,合格的产品要进入箱笼。也就是说在经过检验工序后要设置产品按数量的百分比通过2个不同的output输出。
实验一 MATLAB 及仿真实验(控制系统的时域分析) 一、实验目的 学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点 1、 系统的典型响应有哪些? 2、 如何判断系统稳定性? 3、 系统的动态性能指标有哪些? 三、实验方法 (一) 四种典型响应 1、 阶跃响应: 阶跃响应常用格式: 1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。 2、),(Tn sys step ;表示时间范围0---Tn 。 3、),(T sys step ;表示时间范围向量T 指定。 4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。 2、 脉冲响应: 脉冲函数在数学上的精确定义:0 ,0)(1)(0 ?==?∞ t x f dx x f 其拉氏变换为:) ()()()(1)(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。 脉冲响应函数常用格式: ① )(sys impulse ; ② ); ,();,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y = (二) 分析系统稳定性 有以下三种方法: 1、 利用pzmap 绘制连续系统的零极点图; 2、 利用tf2zp 求出系统零极点; 3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析 Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.
系统仿真综合实验指导书 电气与自动化工程学院 自动化系 2011年6月
前言 电气与自动化工程学院为自动化专业本科生开设了控制系统仿真课程,为了使学生深入掌握MATLAB语言基本程序设计方法,运用MATLAB语言进行控制系统仿真和综合设计,同时开设了控制系统仿真综合实验,30学时。为了配合实验教学,我们编写了综合实验指导书,主要参考控制系统仿真课程的教材《自动控制系统计算机仿真》、《控制系统数字仿真与CAD》、《反馈控制系统设计与分析——MATLAB语言应用》及《基于MATLAB/Simulink的系统仿真技术与应用》。
实验一MATLAB基本操作 实验目的 1.熟悉MATLAB实验环境,练习MATLAB命令、m文件、Simulink的基本操作。 2.利用MATLAB编写程序进行矩阵运算、图形绘制、数据处理等。 3.利用Simulink建立系统的数学模型并仿真求解。 实验原理 MATLAB环境是一种为数值计算、数据分析和图形显示服务的交互式的环境。MATLAB有3种窗口,即:命令窗口(The Command Window)、m-文件编辑窗口(The Edit Window)和图形窗口(The Figure Window),而Simulink另外又有Simulink模型编辑窗口。 1.命令窗口(The Command Window) 当MATLAB启动后,出现的最大的窗口就是命令窗口。用户可以在提示符“>>”后面输入交互的命令,这些命令就立即被执行。 在MATLAB中,一连串命令可以放置在一个文件中,不必把它们直接在命令窗口内输入。在命令窗口中输入该文件名,这一连串命令就被执行了。因为这样的文件都是以“.m”为后缀,所以称为m-文件。 2.m-文件编辑窗口(The Edit Window) 我们可以用m-文件编辑窗口来产生新的m-文件,或者编辑已经存在的m-文件。在MATLAB 主界面上选择菜单“File/New/M-file”就打开了一个新的m-文件编辑窗口;选择菜单“File/Open”就可以打开一个已经存在的m-文件,并且可以在这个窗口中编辑这个m-文件。 3.图形窗口(The Figure Window) 图形窗口用来显示MATLAB程序产生的图形。图形可以是2维的、3维的数据图形,也可以是照片等。 MATLAB中矩阵运算、绘图、数据处理等内容参见教材《自动控制系统计算机仿真》的相关章节。 Simulink是MATLAB的一个部件,它为MATLAB用户提供了一种有效的对反馈控制系统进行建模、仿真和分析的方式。 有两种方式启动Simulink:
考查课结课论文(报告、案例分析)写作要求 1.任课教师可以根据课程性质或教学要求自主安排学生论文(报告、 案例分析)采用打印版或手写版。采用打印版的课程请学生按照本文件的相关要求提交论文(报告、案例分析)。 2.任课教师可依据具体课程要求制定评分标准,并在布置学生写论 文前将《课程论文评分表》以电子表格或其他方式发给学生,让学生提交论文时一并提交评分表,《课程论文评分表》一页需要打印装订。 3.为了便于装订材料,学生提交的论文(报告、案例分析)无论是 打印版还是手写版,最好采用A4纸,且第一页为统一的封皮格式。 4.学生提交的论文(报告、案例分析)为教学档案的资料,每学期 期末任课教师都需在规定时间内将学生提交的论文(报告、案例分析)整理后,提交到开课院部的教学秘书处,以便装订存档。 教务处 2013年5月
智能物流系统课程 物流分拣采集系统实验报告 院系 专业 班级 学生姓名 学号 任课教师宋燕星 年月日
×××××××××××× (“题目”用小二号黑体,居中。标题上空二行,标题与下一行之间空一行。) ×××专业学生×××学号××× (“专业”、“学生”与“学号”用小四号黑黑体,专业、学生姓名与学号姓名用小四号楷体。整行居中。题目与专业、姓名、学号之间空一行,专业、学生、学号与正文之间空二行。) 关键词:×××;×××;×××(小四号宋体) 一、×××× (作为正文一级标题,用三号宋体字,加粗,左空两字,间距为:段前1行,段后1行)×××××××××(小4号宋体,20磅行距)××××××…… (一)××××××(作为正文二级标题,用四号宋体,加粗,左空两字,间距:段前0.5行,段后0.5行) ×××××××××(小4号宋体,20磅行距)××××××…… 1、××××(作为正文三级标题,用小四号宋体,加粗,左空两字,20磅行距) ×××××××××(小4号宋体,20磅行距)××××××…… (1)××××(作为正文4级标题,用小4号宋体,不加粗,左空两字,20磅行距)×××××××××(小4号宋体,20磅行距)××××××…… 二、××××××× (作为正文一级标题,用三号宋体字,加粗,左空两字,间距为:段前1行,段后1行) ×××××××××(小4号宋体,20磅行距)××××××…… ……
《控制系统仿真与CAD》 实验课程报告
一、实验教学目标与基本要求 上机实验是本课程重要的实践教学环节。实验的目的不仅仅是验证理论知识,更重要的是通过上机加强学生的实验手段与实践技能,掌握应用 MATLAB/Simulink 求解控制问题的方法,培养学生分析问题、解决问题、应用知识的能力和创新精神,全面提高学生的综合素质。 通过对MATLAB/Simulink进行求解,基本掌握常见控制问题的求解方法与命令调用,更深入地认识和了解MATLAB语言的强大的计算功能与其在控制领域的应用优势。 上机实验最终以书面报告的形式提交,作为期末成绩的考核内容。 二、题目及解答 第一部分:MATLAB 必备基础知识、控制系统模型与转换、线性控制系统的计算机辅助分析 1. >>f=inline('[-x(2)-x(3);x(1)+a*x(2);b+(x(1)-c)*x(3)]','t','x','flag','a','b','c');[t,x]=ode45( f,[0,100],[0;0;0],[],0.2,0.2,5.7);plot3(x(:,1),x(:,2),x(:,3)),grid,figure,plot(x(:,1),x(:,2)), grid
2. >>y=@(x)x(1)^2-2*x(1)+x(2);ff=optimset;https://www.doczj.com/doc/b73113958.html,rgeScale='off';ff.TolFun=1e-30;ff.Tol X=1e-15;ff.TolCon=1e-20;x0=[1;1;1];xm=[0;0;0];xM=[];A=[];B=[];Aeq=[];Beq=[];[ x,f,c,d]=fmincon(y,x0,A,B,Aeq,Beq,xm,xM,@wzhfc1,ff) Warning: Options LargeScale = 'off' and Algorithm = 'trust-region-reflective' conflict. Ignoring Algorithm and running active-set algorithm. To run trust-region-reflective, set LargeScale = 'on'. To run active-set without this warning, use Algorithm = 'active-set'. > In fmincon at 456 Local minimum possible. Constraints satisfied. fmincon stopped because the size of the current search direction is less than twice the selected value of the step size tolerance and constraints are satisfied to within the selected value of the constraint tolerance.
实验二 最少拍控制系统仿真 一、 实验目的 1. 学习最少拍系统的设计方法和使用Matlab 进行仿真的方法 二、 实验器材 x86系列兼容型计算机,Matlab 软件 三、 实验原理 建立所示的数字系统控制模型并进行系统仿真,已知)1(10)(+= s s s G P ,采样周期T=1s 。 广义被控对象脉冲传递函数: [])3679.01)(1()718.01(679.3)1(1)()(1111-------+=??????+?-==z z z z s s K s e Z s G Z z G Ts ,则G(z)的零点为-0.718(单位圆内)、极点为1(单位圆上)、0.368(单位圆内),故u=0,v=1,m=1。 a. 有纹波系统 单位阶跃信号:根据稳定性要求,G(z)中z=1的极点应包含在Φe (z)的零点中,系统针对阶跃输入进行设计,q=1,显然准确性条件中已满足了稳定性要求,于是可设01)(?-=Φz z ,根据1)1(=Φ求得10=?,则1)(-=Φz z , 11718.01)3679.01(2717.0)(1)()(1)(--+-=Φ-Φ=z z z z z G z D 。 单位斜披信号:根据稳定性要求,G(z)中z=1的极点应包含在Φe (z)的零点中,系统针对阶跃输入进行设计,q=2,显然准确性条件中已满足了稳定性要求,于是可设)()(1101--+=Φz z z ??,根据1)1(=Φ,0)1('=Φ求得20=?,11-=?,则 2 12)(---=Φz z z ,)718.01)(1()5.01)(3679.01(5434.0)(1)()(1)(1111----+---=Φ-Φ=z z z z z z z G z D 。 单位加速度信号:根据稳定性要求,G(z)中z=1的极点应包含在Φe (z)的零点中,系统
中南大学系统仿真实验报告 指导老师胡杨 实验者 学号 专业班级 实验日期 2014.6.4 学院信息科学与工程学院
目录 实验一MATLAB中矩阵与多项式的基本运算 (3) 实验二MATLAB绘图命令 (7) 实验三MATLAB程序设计 (9) 实验四MATLAB的符号计算与SIMULINK的使用 (13) 实验五MATLAB在控制系统分析中的应用 (17) 实验六连续系统数字仿真的基本算法 (30)
实验一MATLAB中矩阵与多项式的基本运算 一、实验任务 1.了解MATLAB命令窗口和程序文件的调用。 2.熟悉如下MATLAB的基本运算: ①矩阵的产生、数据的输入、相关元素的显示; ②矩阵的加法、乘法、左除、右除; ③特殊矩阵:单位矩阵、“1”矩阵、“0”矩阵、对角阵、随机矩阵的产生和运算; ④多项式的运算:多项式求根、多项式之间的乘除。 二、基本命令训练 1.eye(m) m=3; eye(m) ans = 1 0 0 0 1 0 0 0 1 2.ones(n)、ones(m,n) n=1;m=2; ones(n) ones(m,n) ans = 1 ans = 1 1
3.zeros(m,n) m=1,n=2; zeros(m,n) m = 1 ans = 0 0 4.rand(m,n) m=1;n=2; rand(m,n) ans = 0.8147 0.9058 5.diag(v) v=[1 2 3]; diag(v) ans = 1 0 0 0 2 0 0 0 3 6.A\B 、A/B、inv(A)*B 、B*inv(A) A=[1 2;3 4];B=[5 6;7 8]; a=A\B b=A/B c=inv(A)*B d=B*inv(A) a = -3 -4 4 5 b = 3.0000 -2.0000 2.0000 -1.0000
自动分拣系统 自动分拣系统一般由自动控制和计算机管理系统,自动识别装置,分类机构,主输送装置,前处理设备及分拣道口组成。 1)自动控制和计算机管理系统是整个自动分拣的控制和指挥中心,分拣系统的各部个的一切动作均由控制系统决定。其作用是识别,接收和处理分拣信号,根据分拣信号指示分类机构按一定的规则(如品种,地点等)对产品进行自动分类,从而决定产品的流向。分拣信号的来源可通过条形码扫描,色码扫描,键盘输入,质量检测,语音识别,高度检测及形状识别等方式获取,经信息处理后,转换成相应的拣货单,入库单或电子拣货信号,自动分拣作业。 2)自动识别装置是物料能够实现自动分拣的基础系统。在物流配送中心,广泛采用的自动识别系统是条形码系统和无线射频系统。条码自动识别系统的光电扫描安装在分拣机的不同位置,当物料在扫描器可见范围时,自动读取物料上的条码信息,经过对码软件即可翻译成条码所表示的物料信息,同时感知物料在分拣机上位置信息,这些信息自动传输到后台计算机管理系统。 3)分类机构是指将自动识别后的物料引入到分拣机主输送线,然后通过分类机构把物料分流到指定的位置。分类机构是分拣系统的核心设备。 4)主输送装置的作用是将物料输送到相应的分拣道口,以便进行后续作业,主要由各类输送机械成,又称主输送线。 5)前处理设备是分拣系统向主输送装置输送分拣物料的进给台及其他辅助性的运输机和作业台等。进给台的功能有两个,一个是操作人员利用输入装置将各个分拣物料的目的地址送入分拣系统,作为物料的分拣作业指令;二是控制分拣物料进入主输送装置的时间和速度,保证分类机构能准确进行分拣。 6)分拣道口也称分流输送线,是将物料脱离主输送线使之进入相应集货区的通道。一般由钢带、传送带、滚筒等组成滑道,使物料从输送装置滑入缓冲工作台,然后进行入库上架作业或配货工作。
实验一 Matlab使用方法和程序设计 一、实验目的 1、掌握Matlab软件使用的基本方法; 2、熟悉Matlab的数据表示、基本运算和程序控制语句 3、熟悉Matlab绘图命令及基本绘图控制 4、熟悉Matlab程序设计的基本方法 二、实验内容 1、帮助命令 使用help命令,查找sqrt(开方)函数的使用方法; 2、矩阵运算 (1)矩阵的乘法 已知A=[1 2;3 4]; B=[5 5;7 8]; 求A^2*B (2)矩阵除法 已知A=[1 2 3;4 5 6;7 8 9]; B=[1 0 0;0 2 0;0 0 3]; A\B,A/B (3)矩阵的转置及共轭转置 已知A=[5+i,2-i,1;6*i,4,9-i]; 求A.', A' (4)使用冒号选出指定元素 已知:A=[1 2 3;4 5 6;7 8 9]; 求A中第3列前2个元素;A中所有列第2,3行的元素; (5)方括号[] 用magic函数生成一个4阶魔术矩阵,删除该矩阵的第四列 3、多项式 (1)求多项式p(x) = x3 - 2x - 4的根 (2)已知A=[1.2 3 5 0.9;5 1.7 5 6;3 9 0 1;1 2 3 4] , 求矩阵A的特征多项式; 求特征多项式中未知数为20时的值; 4、基本绘图命令 (1)绘制余弦曲线y=cos(t),t∈[0,2π] (2)在同一坐标系中绘制余弦曲线y=cos(t-0.25)和正弦曲线y=sin(t-0.5),t∈[0,2π] 5、基本绘图控制 绘制[0,4π]区间上的x1=10sint曲线,并要求: (1)线形为点划线、颜色为红色、数据点标记为加号; (2)坐标轴控制:显示范围、刻度线、比例、网络线 (3)标注控制:坐标轴名称、标题、相应文本; 6、基本程序设计 (1)编写命令文件:计算1+2+?+n<2000时的最大n值; (2)编写函数文件:分别用for和while循环结构编写程序,求2的0到n次幂的和。 三、预习要求 利用所学知识,编写实验内容中2到6的相应程序,并写在预习报告上。
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
过程控制系统Matlab/Simulink 仿真实验 实验一 过程控制系统建模 ............................................................................................................. 1 实验二 PID 控制 ............................................................................................................................. 2 实验三 串级控制 ............................................................................................................................. 6 实验四 比值控制 ........................................................................................................................... 13 实验五 解耦控制系统 . (19) 实验一 过程控制系统建模 指导内容:(略) 作业题目一: 常见的工业过程动态特性的类型有哪几种?通常的模型都有哪些?在Simulink 中建立相应模型,并求单位阶跃响应曲线。 作业题目二: 某二阶系统的模型为2 () 22 2n G s s s n n ?ζ??= ++,二阶系统的性能主要取决于ζ,n ?两个参数。试利用Simulink 仿真两个参数的变化对二阶系统输出响应的影响,加深对二阶 系统的理解,分别进行下列仿真: (1)2n ?=不变时,ζ分别为0.1, 0.8, 1.0, 2.0时的单位阶跃响应曲线; (2)0.8ζ=不变时,n ?分别为2, 5, 8, 10时的单位阶跃响应曲线。
《MATLAB与控制系统仿真》 实验报告 班级: 学号: 姓名: 时间:2013 年 6 月
目录实验一MATLAB环境的熟悉与基本运算(一)实验二MATLAB环境的熟悉与基本运算(二)实验三MATLAB语言的程序设计 实验四MATLAB的图形绘制 实验五基于SIMULINK的系统仿真 实验六控制系统的频域与时域分析 实验七控制系统PID校正器设计法 实验八线性方程组求解及函数求极值
实验一MATLAB环境的熟悉与基本运算(一) 一、实验目的 1.熟悉MATLAB开发环境 2.掌握矩阵、变量、表达式的各种基本运算 二、实验基本原理 1.熟悉MATLAB环境: MATLAB桌面和命令窗口、命令历史窗口、帮助信息浏览器、工作空间浏览器、文件和搜索路径浏览器。 2.掌握MATLAB常用命令 表1 MATLAB常用命令 变量与运算符 3.1变量命名规则 3.2 MATLAB的各种常用运算符 表3 MATLAB关系运算符 表4 MATLAB逻辑运算符
| Or 逻辑或 ~ Not 逻辑非 Xor逻辑异或 符号功能说明示例符号功能说明示例 :1:1:4;1:2:11 . ;分隔行.. ,分隔列… ()% 注释 [] 构成向量、矩阵!调用操作系统命令 {} 构成单元数组= 用于赋值 的一维、二维数组的寻访 表6 子数组访问与赋值常用的相关指令格式 三、主要仪器设备及耗材 计算机 四.实验程序及结果 1、新建一个文件夹(自己的名字命名,在机器的最后一个盘符) 2、启动MATLAB,将该文件夹添加到MATLAB路径管理器中。 3、学习使用help命令。
实验报告 课程名称:全自动立体仓库实验 课程代码: 6003209 学院(直属系) :建设与管理工程学院 年级/专业/班: 2012级工业工程 学生姓名:杨韬 学号: 312012********* 指导教师:张跃刚贾艳 开题时间: 2015 年 6 月 10 日完成时间: 2015 年 6 月 25 日
目录 1.实验目的和要求…………………………………………………………… 2.实验设备与环境……………………………………………………………… 2.1了解自动化立体仓库系统的总体构成及运作…………………………… 2.2自动化立体仓库的出、入库操作及移库操作…………………………… 2.3绘制自动化立体仓库平面布置图………………………………………… 3.实验内容及步骤………………………………………………………… 3.1实验内容 3.2实验步骤 4.实验结果及分析…………………………………………………………… 4.1绘制生产物流系统的流程程序图………………………………………… 4.2测试记录各工位时间……………………………………………………… 4.3绘制生产线山积图(平衡图) ………………………………………… 4.4借助监控系统监控与记录生产过程,采集生产过程视频……………… 4.5借助达宝易软件对生产过程各工位进行动作时间分析………………… 5.实验总结与感想…………………………………………………………… 参考文献………………………………………………………………………
1、实验目的和要求 通过实验项目培养学生理论与实践相结合的能力。通过实验应达到的基本要求和目的如下: (1)使学生直观地了解和掌握仓储自动化系统的实际运作情况; (2)熟悉自动化仓库系统的设备构成、典型设备和堆垛机; (3)熟悉产品的结构与组成,掌握产品的加工装配工艺过程,进行方法研究,建立标准的作业方法。 2、实验设备与环境 2.1了解自动化立体仓库系统的总体构成及运作 自动化立体仓库系统总体构成包括土建工程及辅助设施、高层货架、自动输送系统、自动存取系统、自动分拣系统、自动监控系统、仓库管理信息系统。 2.2自动化立体仓库的出、入库操作及移库操作 入库操作 入库管理建立与ERP采购计划和到货计划的接口,从物料入库到入库检验和上架进行严格的流程控制。采用条码技术加快入库操作,并可根据既定的规则对物料的存放地点(库位)进行指定,做到物料的有序存放。并实现准确的批次管理。 图8 入库管理模块
第一章控制系统及仿真概述 控制系统的计算机仿真是一门涉及到控制理论、计算数学与计算机技术的综合性新型学科。这门学科的产生及发展差不多是与计算机的发明及发展同步进行的。它包含控制系统分析、综合、设计、检验等多方面的计算机处理。计算机仿真基于计算机的高速而精确的运算,以实现各种功能。 第一节控制系统仿真的基本概念 1.系统: 系统是物质世界中相互制约又相互联系着的、以期实现某种目的的一个运动整体,这个整体叫做系统。 “系统”是一个很大的概念,通常研究的系统有工程系统和非工程系统。 工程系统有:电力拖动自动控制系统、机械系统、水力、冶金、化工、热力学系统等。 非工程系统:宇宙、自然界、人类社会、经济系统、交通系统、管理系统、生态系统、人口系统等。 2.模型: 模型是对所要研究的系统在某些特定方面的抽象。通过模型对原型系统进行研究,将具有更深刻、更集中的特点。 模型分为物理模型和数学模型两种。数学模型可分为机理模型、统计模型与混合模型。 3.系统仿真: 系统仿真,就是通过对系统模型的实验,研究一个存在的或设计中的系统。更多的情况是指以系统数学模型为基础,以计算机为工具对系统进行实验研究的一种方法。 要对系统进行研究,首先要建立系统的数学模型。对于一个简单的数学模型,可以采用分析法或数学解析法进行研究,但对于复杂的系统,则需要借助于仿真的方法来研究。 那么,什么是系统仿真呢?顾名思义,系统仿真就是模仿真实的事物,也就是用一个模型(包括物理模型和数学模型)来模仿真实的系统,对其进行实验研究。用物理模型来进行仿真一般称为物理仿真,它主要是应用几何相似及环境条件相似来进行。而由数学模型在计算机上进行实验研究的仿真一般则称为数字仿真。我们这里讲的是后一种仿真。 数字仿真是指把系统的数学模型转化为仿真模型,并编成程序在计算机上投入运行、实验的全过程。通常把在计算机上进行的仿真实验称为数字仿真,又称计算机仿真。
自动分捡系统设计开题报告 一、课题介绍 1. 课题名称:自动分捡系统设计 2. 课题背景: 自动分拣系统(Automated Sorting System)是二次大战后率先在美国、日本的物流中心中广泛采用的一种自动化作业系统,该系统目前已经成为发达国家大中型物流中心不可缺少的一部分。该系统的作业过程可以简单描述如下:流动中心每天接收成百上千家供应商或货主通过各种运输工具送来的成千上万种商品,在最短的时间内将这些商品卸下并按商品品种、货主、储位或发送地点进行快速准确的分类,将这些商品运送到指定地点(如指定的货架、加工区域、出货站台等),同时,当供应商或货主通知物流中心按配送指示发货时,自动分拣系统在最短时间内从庞大的高层货架存储系统中准确找到要出库的商品所在位置,并按所需数量出库,将从不同储位上取出的不同数量的商品按配送进点的不同运送到不同的理货区域或配送站台集中,以便装车配送。 3.国内外发展现状: 纵观国内外物料自动分拣系统的使用情况可以发现,国外发达国家的物料自动分拣系统倾向于采用自动化程度很高的物料自动分拣系统。而在我国,由于起步晚,物料自动分拣系统中人工作业的比例也较高。国外物料自动分拣系统的广泛使用,以美国、日本及欧洲为代表的发达国家,在物料自动分拣系统的使用上呈现出自动化程度越来越高的特点。物料自动分拣系统已成为发达国家工业自动化不可缺少的一部分。主要使用在大中型物流中心、配送中心、流通中心、邮局分拣信件等等随着交流自动控制技术的发展,特别是电子技术的迅速发展,计算机的广泛使用。自动分拣技术在20世纪70年代被引入国内,我国的邮政系统最早并已多年使用自动分拣设备,并在长期的实践中不断创新、不断进步。例如,邮电部相关部门相继开发和研制出具国际水平的CORE-NT物料自动分拣系统,性价比很高的扁平邮件高速物料自动分拣系统;上海邮政通用技术设备公司研制成功了速递邮件网络化物料自动分拣系统等。邮政系统还推出了新的信封标准以更好的配合自动化的信件物料自动分拣系统。
昆明理工大学电力工程学院学生实验报告 实验课程名称:控制系统仿真实验 开课实验室:年月日
实验一 电路的建模与仿真 一、实验目的 1、了解KCL 、KVL 原理; 2、掌握建立矩阵并编写M 文件; 3、调试M 文件,验证KCL 、KVL ; 4、掌握用simulink 模块搭建电路并且进行仿真。 二、实验内容 电路如图1所示,该电路是一个分压电路,已知13R =Ω,27R =Ω,20S V V =。试求恒压源的电流I 和电压1V 、2V 。 I V S V 1 V 2 图1 三、列写电路方程 (1)用欧姆定律求出电流和电压 (2)通过KCL 和KVL 求解电流和电压
四、编写M文件进行电路求解(1)M文件源程序 (2)M文件求解结果 五、用simulink进行仿真建模(1)给出simulink下的电路建模图(2)给出simulink仿真的波形和数值
六、结果比较与分析
实验二数值算法编程实现 一、实验目的 掌握各种计算方法的基本原理,在计算机上利用MATLAB完成算法程序的编写拉格朗日插值算法程序,利用编写的算法程序进行实例的运算。 二、实验说明 1.给出拉格朗日插值法计算数据表; 2.利用拉格朗日插值公式,编写编程算法流程,画出程序框图,作为下述编程的依据; 3.根据MATLAB软件特点和算法流程框图,利用MATLAB软件进行上机编程; 4.调试和完善MATLAB程序; 5.由编写的程序根据实验要求得到实验计算的结果。 三、实验原始数据 上机编写拉格朗日插值算法的程序,并以下面给出的函数表为数据基础,在整个插值区间上采用拉格朗日插值法计算(0.6) f,写出程序源代码,输出计算结果: 四、拉格朗日插值算法公式及流程框图
计算机基础理论实验四 简单控制系统python仿真实验 学号:13 姓名: 陈严 实验日期:2012/5/24 实验目的:学习计算机仿真的方法。 实验内容:1.建立test.py文件,运行test.py,分析实验结果; 2.为每一行代码写一个注释 系统如上图,鼓风机吹出风需要经过阀门才能到达风轮;而风轮的转速会影响到杠杆位置间接影响到阀门开度。鼓风机的输入为正作用;风轮以至阀门的影响为负作用(或负反馈)。 代码: #coding=utf-8 #系统参数 a=0.1 b=1.0 #系统结构,F:鼓风机的风力; F1:实际输入风力;W:风轮转速 def WW(): return a*F1 //*每次输入的风力 def FF1(): return F-b*W //*杠杆所得到的力 #初始条件 F1=2 //*实际输入风力为2
W=0.2 //*风轮转速为0.2转每秒 print F1,W //*输入实际风力和转速 #鼓风机风力正常 F=2.2 //*鼓风机的风力为2.2 print "鼓风机风力",F //*输出鼓风机的风力 #随着时间增加 for t in xrange(20): //*返回一个迭代序列 F1,W=FF1(),WW() //*将风力和转速进行更新 print F1,W //*输出更新后的风力和转速#鼓风机风力偏大 F=2.3 //*当鼓风机的风力为2.3时print "鼓风机风力",F #随着时间增加 for t in xrange(20): //*返回迭代列20次 F1,W=FF1(),WW() //*再次更新 print F1,W //*输出实际风力和转速 #鼓风机风力偏小 F=2.2 //*当风力为2.2时 print "鼓风机风力",F #随着时间增加 for t in xrange(20): //*在f=2.2时,再次迭代 F1,W=FF1(),WW() print F1,W 实验结果:
实验2 自动分拣系统仿真 1.实验目的 通过建立一个传送带系统,学习Flexsim提供的运动系统的定义;学习Flexism提供的conveyor系统的建模,进一步学习模型调整和系统优化。 2.实验内容 (1)系统描述和系统参数 分拣系统的流程描述和系统参数如下。 ①四种货物A,B,C,D各自独立到达高层的传送带入口端: A的到达频率服从正太分布函数normal(400,50)s。 B的到达频率服从正态分布函数normal(200,40)s。 C的到达频率服从正态分布函数normal(500,100)s。 D的到达频率服从正太分布函数normal(500,100)s。 D的到达频率服从均匀分布函数uniform(150,30)s。 ②四种不同的货物烟一条传送带,根据品种的不同由分拣装置将其推入到四个不同的分拣道口,经各自的分拣道到达操作台。 ③每个检验包装操作台需操作工一名,货物经检验合格后打包,被取走。 ④没检验一件货物占用时间为uniform(60,20)s。 ⑤每种货物都可能有不合格产品。检验合格的产品放入箱笼;不合格的通过地面传送带送往检修处修复;A的合格率为95%,B为96%,C的合格率为97%,D的合格率为98%。 传送带的传送速度采用默认速度。 (2)实验要求 对上述传送分拣系统进行建模,仿真系统一天8h的运行状况,并完成思考。 3.实验步骤 (1)构建模型布局。 打开Flexism3.0,新建一个模型。从对象库中拖放所需的对象到建模视图中并根据实验内容的描述修改各实体的名字,如图1。 图1
(2)定义工件流程。 按住A键,同时用鼠标左键点击SourceA对象并且按住鼠标左键不放,然后拖动鼠标至Queue1对象。此时会出现一条黄线连接SourceA 和Queue1对象。然后松开鼠标左键,黄线将变成一条黑线,表示SourceA对象和Queue1对象的端口已经连接上。如上所述将SourceB,SourceC,SourceD和Queue1相连接;Queue1和Conveyor1相连;Conveyor1和ConveyorA 相连;Conveyor1和ConveyorB相连;Conveyor1和ConveyorC相连;Conveyor1和ConveyorD相连;ConveyorA和ProcessorA相连;ConveyorB和ProcessorB相连;ConveyorC 和ProcessorC相连;ConveyorD和ProcessorD相连;ProcessorA和Conveyor2、QueueA 相连;ProcessorB和Conveyor2、QueueB相连;ProcessorC和Conveyor2、QueueC相连,ProcessorD和Conveyor2、QueueD相连;Conveyor2和Sink相连。 按住S键将ProcessorA和OperatorA相连;同理将ProcessorB和OperatorB相连;ProcessorC和OperatorC相连;ProcessorD和OperatorD相连。 连接后的模型如图2所示。 图2 (3)定义对象参数 双击SourceA对象,打开其参数对话框,在“发生器的界面”将物品类型选取默认设置“1”;修改产品流出间隔时间,从“到达时间间隔”下拉框中选择使用正态分布,如图3;并修改选项的默认参数点击Template按钮修改其中的棕褐色的参数值:将“10”改为“400”,“2”改为“50”如图示4。点击“发生触发器”,在“离开触发”下拉菜单中选择颜色设置使用默认设置将物品设置为红色,如图5;点击Source参数框中的“使用”,“确定”。
控制系统数字仿真实验报告 班级:机械1304 姓名:俞文龙 学号: 0801130801
实验一数字仿真方法验证1 一、实验目的 1.掌握基于数值积分法的系统仿真、了解各仿真参数的影响; 2.掌握基于离散相似法的系统仿真、了解各仿真参数的影响; 3.熟悉MATLAB语言及应用环境。 二、实验环境 网络计算机系统(新校区机电大楼D520),MATLAB语言环境 三实验内容 (一)试将示例1的问题改为调用ode45函数求解,并比较结果。 实验程序如下; function dy = vdp(t,y) dy=[y-2*t/y]; end [t,y]=ode45('vdp',[0 1],1); plot(t,y); xlabel('t'); ylabel('y');
(二)试用四阶RK 法编程求解下列微分方程初值问题。仿真时间2s ,取步长h=0.1。 ?????=-=1 )0(2y t y dt dy 实验程序如下: clear t0=0; y0=1; h=0.1; n=2/h; y(1)=1; t(1)=0; for i=0:n-1 k1=y0-t0^2; k2=(y0+h*k1/2)-(t0+h/2)^2; k3=(y0+h*k2/2)-(t0+h/2)^2;
k4=(y0+h*k3)-(t0+h)^2; y1=y0+h*(k1+2*k2+2*k3+k4)/6; t1=t0+h; y0=y1; t0=t1; y(i+2)=y1; t(i+2)=t1; end y1 t1 figure(1) plot(t,y,'r'); xlabel('t'); ylabel('y'); (三)试求示例3分别在周期为5s的方波信号和脉冲信号下的响应,仿真时间20s,采样周期Ts=0.1。
MATLAB与控制系统仿真及实验 实验报告 (二) 2015- 2016 学年第 2 学期 专业: 班级: 学号: 姓名: 20 年月日
实验二 MATLAB的图形绘制 一、实验目的 1.学习MATLAB图形绘制的基本方法 2.熟悉和了解MATLAB图形绘制程序编辑的基本指令 3.熟悉掌握利用MATLAB图形编辑窗口编辑和修改图形界面,添加图形的标注 4.掌握plot、subplot的指令格式和语法 二、实验设备及条件 计算机一台(包含MATLAB 软件环境)。 三、实验内容 1.生成1×10 维的随机数向量a,分别用红、黄、蓝、绿色绘出其连线图、杆图、阶梯图和条形图,并分别标出标题“连线图”、“杆图”、“阶梯图”、“条形图”。 (1. Generate random vector of dimension 1×10, and use different functions plot, stem, stairs and bars to draw figures with different colors, such as red, yellow, blue and green. Then title the figures with "Plot", "Stem", "Stem", "Bars" respectively.) a=rand(1,10); subplot(2,2,1); plot(a,'r'); title('连线图'); subplot(2,2,2); stem(a,'y'); title('杆图'); subplot(2,2,3); stairs(a,'b'); title('阶梯图'); subplot(2,2,4); bar(a,'g'); title('条形图'); 2. 绘制函数曲线,要求写出程序代码。 (2. Plot the curves and write down the code.) (1) 在区间[0:2π]均匀的取50个点,构成向量t t=linspace(0,2*pi,50)
物流自动分拣系统设计 摘要:物流自动分拣系统是先进配送中心所必需的设施条件之一,自动分拣装置是提高物流配送效率的一项关健因素。只有在自动分拣系统中合理地选用分拣装置才能保证整个系统的安全高效运行。本文首先对自动分拣系统做了简单地介绍,然后提出了系统设计的一般方法,最后通过实例对自动分拣系统进行了分析和探讨。 关键字:自动分拣系统;分拣装置;设计方法;自动分拣系统设计 1.自动分拣系统概述 自动分拣系统是二次大战后在美国、日本等发达国家的物流中心、配送中心或流通中心所必需的设施条件之一。该系统的作业过程可以简单描述如下:物流中心每天接收成百上千家供应商或货主通过各种运输工具送来的成千上万种商品,在最短的时间内将这些商品卸下并按商品品种、货主、储位或发送地点等参数进行快速准确的分类,并将这些商品运送到指定地点(如指定的货架、加工区域、出货站台等);同时,当供应商或货主通知物流中心按配送指示发货时,自动分拣系统在最短的时间内从宠大的高层货架存储系统或其他指定地点中准确找到要出库的不同数量的商品按配送地点的不同运送到不同的理货区域或配送站台集中,以便装车配送。 2.自动分拣系统组成及特点 2.1自动分拣系统结构组成 如图1所示,自动分拣系统一般由上件装置、输送装置、分拣格口、控制系统组成。 1-输送装置2-上件装置3-控制系统4-分拣道口5-分类装置 图1 自动分拣系统结构组成 上件装置的作用是识别、接收和处理分拣信号,根据分拣信号的要求去指示分类装置按商品品种、商品送达地点或货主的类别等方式对商品进行自动分类。这些分拣需求可以通过不同方式,如可以通过人工输入、条形码扫描、色码扫描、键盘输入、重量检测、语音识别、高度检测及形状识别等方式,输入到分拣控制系统中去,根据这些分拣信号判断,来决定某一种商品该进入哪一个分拣格口。 分类装置的作用是根据上件装置发出的分拣指令,当具有相同分拣信号的商品经过装置时,该装车动作,使改变在输送装置上的运行方向进入其它输送机或进入分拣格口或其他接口设备。分类装置的种类很多,一般有推出式、浮出式、倾斜式、输送式和分支式几种,不同的装置对分拣货物的包装材料、包装重量、包装物底面的平滑程度等有不完全相同的要求。