智能控制》课程论文
基于MATLAB的温度模糊控制系统的设计
成绩:任课教师:田志波班级:测控09-2 作者:胡
兵上交时间:2012.11.05
一、温度模糊控制
在工业生产过程中,温度控制是重要环节,控制精度直接影响系统的运行和产品质量。在传统的温度控制方法中,一般采取双向可控硅装置,并结合简单控制算法(如PID算法),使温度控制实现自动调节。但由于温度控制具有升温单向性、大惯性、大滞后等特点,很难用数学方法建立精确的模型,因此用传统的控制理论和方法很难达到好的控制效果。鉴于此,本文拟以模糊控制为基础的温度智能控制系统,采用人工智能中的模糊控制技术,用
模糊控制器代替传统的PID控制器,以闭环控制方式实现对温度的自动控制。
二、方案设计
利用MATLA的模糊控制箱及Simulink内含的功能元件,建立温度箱温度模糊控制器及其系统的模型。
1. 建立模糊控制器
采用温度偏差,即实际测量温度与给定温度之差e及偏差变化率ed作为模糊控制器的输
入变量,输出p为“PW波(脉冲宽度调制)”控制发热电阻的功率,来调节温度箱内温度的升降,形成典型的双输入单输出二维模糊控制器。
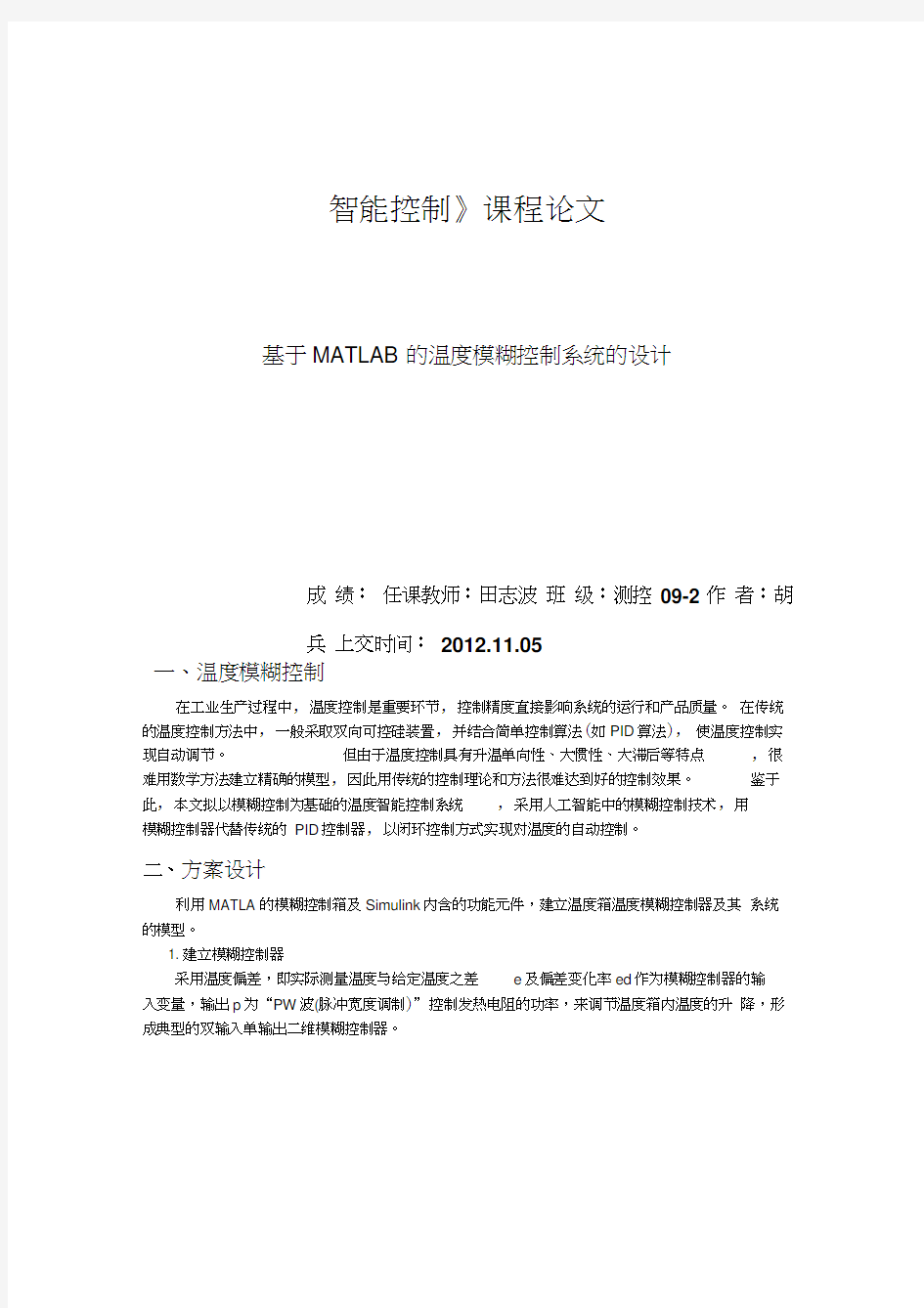
运用MATLA中的FIS编辑器,建立温度箱的Mamdan型模糊控制器,如图1所示。温度偏差e、温度偏差变化率ed和输出变量IZ的语言变量E, Ed, P都选择为{NB, NM NS Z, PS, PM PB},其中P和N分别表示正与负,B, M s分别表示大、中、小,z表示0。
图1模糊控制器模型
2. 建立控制决策及隶属函数
模糊控制决策及解模糊方法采用系统默认值,即极大极小合成运算与重心法解模糊。由模糊控制决策公式可求得输出变量的模糊集合为P =(E X Ed ) X R
本文都采用三角隶属函数,各变量的隶属函数如图2所示。其中,图2(a)为E和Ed,隶属
函数图,E和Ed的量化论域为[-6 , 6];图2(b)为P隶属函数图,EQ的量化论域为[-6 , 6]。不同的系统,其模糊集的隶属函数是不同的,要根据实际情况和实践经验而定。
(a) E和Ed隶属函数
output variable "p"
(b)P隶属函数图图2隶属函数图
3. 建立模糊控制规则
模糊控制规则如表1所示。建立该系统模糊控制规则的基本原则为:当温度偏差较大时,选择控制量以尽快消除误差为主;当温度偏差较小时,选择控制量要注意防止超调,以系统的稳定性为主要出发点。
将模糊控制规则表中的规则逐一输入模糊控制规则界面。如图3所示:
图3
模糊规则三维关系曲面图如图4所示。从图3可以清晰地观测到模糊系统基于输入集的输出集的变化范围。
图4控制规则三维关系图
按view-Rules,可得到部分规则视图。如图5所示
Rule Vi-Hver: C8FZPD
File Edit Viflw Option%
叭[DOJ
Pio 伽W 阿 I
卜理;[Ian ] [ F 也n ] [dnwi] [ up ]
Opened system C6FZPD, 49 rtilts
| H E I P 1 Giose |
图5部分规则视图
三、进行 matlab 的仿真
为了验证所设计的温度模糊控制器的性能
,并在仿真过程中及时调整模糊控制器的
控制规则和各项参数,笔者利用Matlab 软件进行仿真研究.本次设计利用FuzzyLog ic Too lbox 和S imu link 图形化工具平台,对温度控制系统进行优化模糊控制设计与仿真 的。
在进行温度控制系统的仿真之前 ,必须建立被控对象的数学模型 ?通常采用阶跃响 应法来获得对象的特性?温度箱温度控制系统的传递函数数学模型 ,近似等效为带纯滞后 的一阶对象。
G(S)=Ku( e -ts ) /85s+1
在进行模糊控制仿真时,首先利用M atlab 的模糊逻辑工具箱建立温度箱模糊控制器 然后在S imulink 环境下把模糊控制器加载进相应模块 ,进行仿真.量化因子Kp=2, Kd =1,
Ku =21,模糊控制器的封装以及阶跃响应曲线分别如图
6,图7所示.
z________
---------
* J
IL 7
乂》—
1
一
i -------- 上
2^
-——
------- 吩 -------
ft ? 0
234
占
Er-$勺
10111213141516171819202122虻2425囲27胡
29
皿
ed ?o
p M ?4.66e-O1?
图7阶跃响应曲线
由图7可知,采用模糊控制不仅调节时间短,系统响应加快,而且在超调量和抗干扰 能力方面均优于PID 控制器,具有更好的动态性能和稳态精度
.
四、结论总结
随着科学技术的发展, 智能控制技术必会日趋完善,
并且能够在更多的领域上应用。 此
设计是基于MATLAB 的模糊控制系统,通过调试及仿真,可以初步得出温度控制的关系原理, 从而为在实际应用上提供一个参考, 但是在实际应用中还应考虑实际的影响因素,
例如环境
对控制系统的影响、人为因素对控制系统的影响等。面对实际问题时应具体问题具体分析。 有不足的
地方再加以改进。
参考文献:
1、马明远?人工智能与专家系统导论?清华大学出版社, 2006
2、韩力群?智能控制理论及应用?机械工业出版社, 2008
3、 韩俊峰,李玉惠等?模糊控制技术?重庆大学出版社,
4、 李友善,李军.模糊控制理论及其在过程控制中的应用
2003
[M].国防工业出版社,1993 图6系统仿真模型图