摩托车和轻便摩托车制动性能要求及试验方法
1 范围
本标准规定了摩托车和轻便摩托车的制动性能要求和试验方法。
本标准适用于摩托车和轻便摩托车。
本标准不适用于最高设计车速不超过25km/h的轻便摩托车和残疾人用车。
2 规范性引用文件
下列文件中的的条款通过本标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本标准。
GB/T 5359.5 摩托车和轻便摩托车术语两轮车质量
GB/T 5359.6 摩托车和轻便摩托车术语三轮车质量
GB/T 15089 机动车辆及挂车分类
3 术语和定义
下列术语和定义适用于本标准。
L类车辆的定义见GB/T 15089。
3.1 制动装置braking device
指使运动的车辆逐渐减速或停止,或者使已停止的车辆保持静止状态的零部件组合,其功能如4.1.2所述。该装置由控制器、传能装置和制动器组成。
3.2 控制器control
指由驾驶员直接操作用以向传能装置提供制动或控制所需能量的部件。该能量可以是驾驶员肌肉伸缩的能量或是来自驾驶员控制的其他能量,或者是这些能量的组合。
3.3 传能装置transmission
指控制器和制动器之间连接其功能的零部件组合。如果制动力并非由驾驶员产生,而是由驾驶员控制的能源产生或辅助,则该能量贮存装置也属于传能装置的一部分。
3.4 制动器brake
指制动装置中产生阻止车辆运动作用力的部件。
3.5制动装置零部件component(s) of a braking device
指经过组装构成制动装置的一个或多个单独的零部件。
3.6 联动制动系统combined braking system指:
3.6.1 对于两轮轻便摩托车(L1类)和两轮摩托车(L3类),操纵单个控制器可以联合控制不同车轮上至少两个制动器的一套制动系统。该控制方法需另设置一个独立于仅作用于一个车轮上的应急制动装置的控制器;
3.6.2 对于三轮轻便摩托车(L2类)和正三轮摩托车(L5类),控制全部车轮的一套制动装置;
3.6.3 对于边三轮摩托车(L4类),至少控制前轮和后轮的一套制动装置。因此同时控制后轮和边轮的制动装置应认为是一个后制动器。
3.7 满载车辆laden vehicle
除另有说明外,指加载达到其厂定最大总质量(按GB/T 5359.5、GB/T 5359.6)的车辆。
3.8 空载车辆unladen vehicle
指用于试验的,只包括一名驾驶员和必要的试验设备及仪器在内的车辆。
3.10 湿制动器wet brake
指按本标准附录A中A.1.5处理的一个或多个制动器。
4 技术要求
4.1 总则
4.1.1 制动装置
4.1.1.1 制动装置的设计、制造和装配必须保证车辆在正常使用条件下,不论受到何种振动均能满足本标准的要求;
4.1.1.2 制动装置的设计、制造和装配必须保证其在正常使用环境中具有耐腐蚀和抗老化的能力。4.1.1.3 制动器摩擦衬片不应含有石棉。
4.1.2 制动装置的功能
本标准3.1中定义的制动装置必须具备以下功能:
4.1.2.1 行车制动
不论车速高低、载荷大小、车辆上坡或下坡,行车制动系统必须能控制车辆的行驶,并使车辆安全、迅速、有效的停止;该制动操作应是渐进的;必须保证驾驶员在其座位上手无须离开方向把就能实现该制动。
4.1.2.2 应急制动(若装有)
应急制动应在行车制动失效的情况下,在适当的一段距离内使车辆停住;该制动操作应是渐进的;驾驶员应当在座位上至少一只手握住方向把的情况下实现应急制动。
4.1.2.3 驻车制动(若装有)
驻车制动必须能通过纯机械装置把工作部件锁住,使车辆停在上坡或下坡的地方,即使驾驶员离开亦如此。驾驶员应能在座位上实现该制动。
4.2 制动装置的特性
4.2.1 每辆两轮轻便摩托车(L1类)和两轮摩托车(L3类)应装有具有独立控制器和传能装置的两套行车制动装置,且至少一套控制前轮,另一套控制后轮。
4.2.1.1 只要一套行车制动装置的某一故障不影响另一套的制动性能,这两套行车制动装置可共用一个制动器。某些零部件,如制动器、制动泵体及其配套的活塞(密封件除外)、推杆和制动装置凸轮组,如果它们有合适的尺寸公差、易于维修和足够的安全特性,则可不考虑其易损性。
4.2.1.2 驻车制动装置是非强制性的。
4.2.2 每辆边三轮摩托车(L4类),应装有不带边车时所要求的制动装置,若这些装置在带边车车辆试验中能达到所要求的性能水平,则边车车轮不必装制动器;驻车制动装置是非强制性的。
4.2.3 每辆三轮轻便摩托车(L2类)应装有:
4.2.3.1 一起控制全部车轮上制动器的两套独立的行车制动装置,或
4.2.3.2 一套控制全部车轮的行车制动装置和一套应急制动装置,该应急制动装置可以是驻车制动装置。
4.2.3.3 每辆三轮轻便摩托车应装有一套控制至少一根轴上的一个或两个车轮的驻车制动装置。该装置可以是本标准4.2.3.1中规定的两种装置之一,但必须与作用于其它轴的装置无关。
4.2.4 每辆正三轮摩托车(L5类)应装有:
4.2.4.1 一套控制全部车轮的脚控行车制动装置和一套应急制动装置,该应急制动装置可以是驻车制动装置;和
4.2.4.2 一套至少控制一根轴上全部车轮的驻车制动装置。驻车制动装置的控制器必须和行车制动装置的控制器分开。
4.2.5 制动装置必须作用在与车轮刚性连接或通过不易失效零部件永久连接的制动器表面。
4.2.6 与车辆相连的所有制动装置的零部件应保证在正常工作条件下制动装置不会失效。
4.2.7 经适当的润滑和调整,制动装置的操作应灵活自如。
4.2.7.1 制动器的磨损应能通过手动或自动调整装置的调整易于补偿,在制动器摩擦衬片磨损到需要更换的位置点之前,制动器应能调整到有效工作位置;
4.2.7.2 控制器、传能装置及制动器的零部件应具有一定的储备行程,以保证当制动器过热或制动器摩擦衬片达到最大允许磨损量时,无需立即调整仍能有效地制动。
4.2.7.3 经正确调整后的制动装置零部件在工作中不应与无关零件接触。
4.2.8 对于液压制动装置,在设计和制造储液器时,应考虑便于检查其液面高度。
5 试验
制动试验和制动性能要求按本标准附录A规定。
装有防抱死装置的两轮轻便摩托车和两轮摩托车的要求见附录B。
(规范性附录) 制动试验和制动性能要求
A.1 制动试验 A.1.1 总则
A.1.1.1 制动装置所规定的性能用制动距离和/或充分发出的平均减速度来判定。制动装置的性能指在规定的条件下通过测量相应初速度下的制动距离或充分发出的平均减速度来确定。
A.1.1.2 制动距离是指从驾驶员开始操作制动控制器时起到车辆停止时车辆所驶过的距离。制动初
速度(V 1)是指驾驶员开始操作制动控制器时的车辆速度,该速度应不小于试验规定速度的98%。充分发出的平均减速度(d m )通过下面公式进行计算:
2b e 2
e
2b m m/s )
s -(s 25.92v -v d
式中:d m ——充分发出的平均减速度
v 1——初速度 v b ——0.8 v 1 v e ——0.1 v 1
s b ——从v 1 到 v b 的距离 s e ——从v 1 到 v e 的距离
速度和距离测量仪器的准确度为1%,充分发出的平均减速度也可通过其他方法来确定,此时其
准确度应在3%以内。
A.1.2 按下列条件进行道路试验以测量制动性能:
A.1.2.1 被试车辆的载荷状态应符合各型试验的规定,并在试验报告中予以说明
A.1.2.2 应按规定的方式和速度进行各型试验。如果车辆的最高车速不符合试验规定的车速,应在规定的替代条件下进行试验;
A.1.2.3 应在车轮不抱死、车辆不偏离试验通道和无异常振动的条件下测量规定的制动性能; A.1.2.4 为了获得规定的性能,试验期间作用在控制器上的力不得超过该类型试验车辆所规定的最大值。
A.1.3 试验条件
A.1.3.1 应在下列条件下进行行车制动试验:
A.1.3.1.1 试验或系列试验开始时,轮胎应为冷态,并且轮胎气压应为车辆静止时车轮实际承受载荷所规定的气压;
A.1.3.1.2 当需要在加载条件下进行试验时,车辆应按制造厂要求的质量分配加载;
A.1.3.1.3 所有0型试验,制动器应处于冷态,即制动盘或制动鼓外侧测得的温度应低于100℃; A.1.3.1.4 驾驶员应坐在正常驾驶的位置上,并且整个试验期间应保持同一位置; A.1.3.1.5 试验场地必须平坦、干燥,并且有良好的附着力;
A.1.3.1.6 应在不致于影响试验结果的风速条件下进行试验。
A.1.4 0型试验(行车制动)
A.1.4.1 总则
行车制动最低性能限值见各类型车辆的规定,车辆应同时满足规定的制动距离和充分发出的平均减速度,但这两个参数不必都进行测量。
A.1.4.2 脱开发动机的0型试验
试验应按该类型车辆所规定的速度进行,该速度值应满足一定的公差范围。对于装有两套独立行车制动装置的车辆,应分别进行试验。各类型车辆的每套制动装置应达到其最低性能。
A.1.4.2.1 如果车辆装有手动变速箱或可手动脱开变速箱的自动变速器,应在变速箱不运转、脱开离合器或采用其它方法脱开发动机的条件下进行试验;
A.1.4.2.2 对于装有其它型式自动变速器的车辆,应在其正常工作条件下进行试验。
A.1.4.3 两轮摩托车(L3类)、边三轮摩托车(L4类)与正三轮摩托车(L5类)接合发动机的0型试验
试验应在空载、不同车速下进行,最低试验车速应为车辆最高车速的30%,最高试验车速应为车辆最高车速的80%与160km/h两者中的较低值。
应测量实际的最大性能数值,并与车辆制动状况一起记录在试验报告中。
如果车辆装有两套独立的行车制动装置,该两套制动装置应在空载条件下同时进行试验。
A.1.4.4 湿制动器脱开发动机的0型试验
应按两轮轻便摩托车(L1类)、三轮轻便摩托车(L2类)、两轮摩托车(L3类)和边三轮摩托车(L4类)进行本项试验(下述A.1.5.1的封闭式制动器免除本项试验)。除本附录A.1.5所述的喷湿制动器规定外,本试验程序与脱开发动机的0型试验相同。
A.1.5 湿制动器试验的特殊规定
A.1.5.1 封闭式制动器:装有在正常行驶条件下不透水的传统鼓式制动器或全封闭盘式制动器的车辆,不必进行湿制动器的0型试验。
A.1.5.2 湿制动器试验应在与干制动器相同的条件下进行。除了安装制动器喷水装置外,制动系统不得有任何变动或调整。
A.1.5.3 在每次制动试验中,试验装置应以15L/h的流量连续给每只制动器喷水。同一车轮上的两只盘式制动器应看成是两个制动器。
A.1.5.4 对于外露或部分外露的盘式制动器,规定的水流量应直接喷在旋转的制动盘上,并使其均匀地分布在摩擦衬块滑过的盘面。
A.1.5.4.1 对于全部外露的盘式制动器,水流应在摩擦衬块前45°处直接喷向盘面;
A.1.5.4.2 对于部分外露的盘式制动器,水流应在护罩或护板前45°处直接喷向盘面;
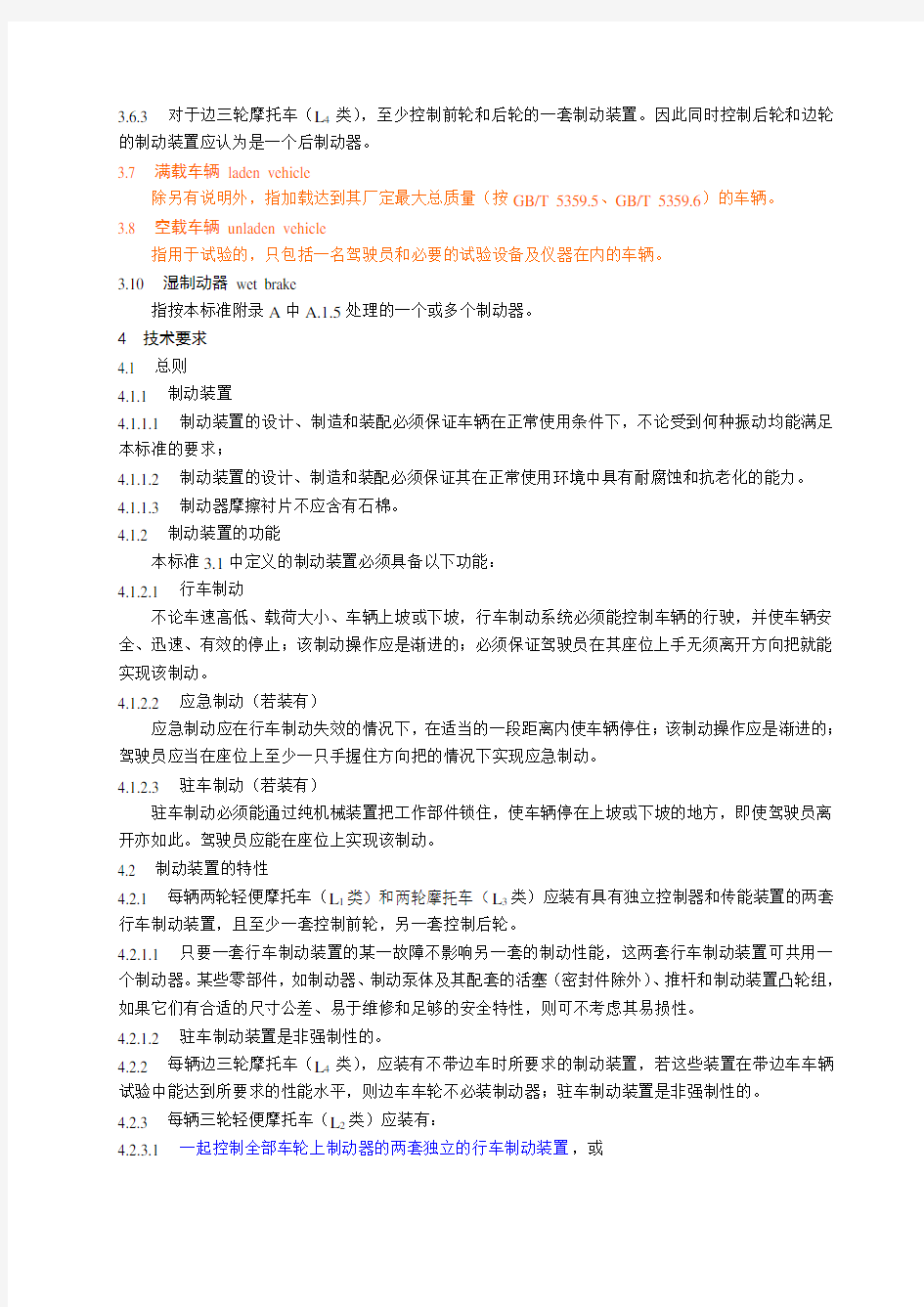
A.1.5.4.3 水流应从一位于制动盘与摩擦衬块接触部分内缘以外、且距外缘2/3处的单孔喷嘴垂直地连续喷向制动盘表面(见图A.1)。
A.1.5.5 对于不符合上述A.1.5.1规定的全封闭的盘式制动器,水流应按本附录A.1.5.4.1~A.1.5.4.3 所述的位置和方式,喷向护罩或护板两侧,当喷嘴位置与通气孔或检查孔重合时,应在该孔前90°处进行喷水。
A.1.5.6 因车辆上装有固定件而不能按A.1.5.3和A.1.5.4规定的位置喷水时,应在大于45°而不受阻
挡的第一点处喷水。
A.1.5.7 对于不符合上述A.1.5.1规定的鼓式制动器,规定的水流量应均匀分布在制动装置(即制动鼓盖和制动鼓)的两侧,喷嘴应位于制动鼓外缘到轮毂中心距离的2/3处。
A.1.5.8 根据A.1.5.7以及喷嘴不应与制动鼓盖上通气孔或检查孔重合或在其15°范围内的要求,鼓式制动器的喷水装置应位于能够获得连续喷水的最佳位置。
A.1.5.9 为了保证正确喷湿制动器,在系列试验开始前,应按下述条件驾驶车辆:
喷水装置按本附录规定连续喷水;
以规定的试验速度;
不得操作待试验的制动装置;
试验点前的行驶距离不少于500m。
A.1.6 I型试验(衰退试验)
A.1.6.1 特殊规定
A.1.6.1.1 所有两轮摩托车(L3类)、边三轮摩托车(L4类)和正三轮摩托车(L5类)的行车制动装置必须在满载条件下,依下述A.2的要求进行一系列的制动停车试验。对于装有联动制动系统的车辆,只需对该系统进行Ⅰ型试验。
A.1.6.1.2 Ⅰ型试验分三部分进行:
A.1.6.1.2.1 按本附录A.2.1.2或A.2.2.2.1要求先进行一次单独的0型试验;
A.1.6.1.2.2 按下述A.1.6.2要求再进行10次重复制动停车的系列试验;
A.1.6.1.2.3 完成A.1.6.1.2.2规定的试验以后,尽可能快地(1min内)按A.1.6.1.2.1相同的条件(尤其是制动力尽可能不变,其平均值不超过A.1.6.1.2.1实际使用的平均制动力)进行一次单独的0型试验。
A.1.6.2 试验条件
A.1.6.2.1 试验车辆和制动器不应受潮,制动器应为冷态,即制动盘或制动鼓外侧的温度低于100℃。
A.1.6.2.2 试验初速度
A.1.6.2.2.1 对于前制动器试验,应为:70%最高车速和100km/h两者中的较低值。
A.1.6.2.2.2 对于后制动器试验,应为:70%最高车速和80km/h两者中的较低值。
A.1.6.2.2.3 对于联动制动系统试验,应为:70%最高车速和100km/h两者中的较低值。
A.1.6.2.3 两次相邻制动起点之间的距离应为1000m。
A.1.6.2.4 变速箱和(或)离合器应按以下要求使用:
A.1.6.2.4.1 如果车辆装有手动变速器或可手动脱开变速箱的自动变速器,在每次制动停车过程中应使用能够得到试验初速度的最高档位进行试验。
当车速降到试验初速度的50%时,应脱开发动机。
A.1.6.2.4.2 如果车辆装有全自动变速器,应在该变速器正常工作条件下进行试验。
接近测试起点时,应使用适合试验初速度的档位。
A.1.6.2.5 每次制动停车后,应立刻以最大加速度使车辆达到试验初速度,并保持该速度至下一次制动的开始。必要时,加速之前车辆可在试验跑道上转向。
A.1.6.2.6 应调整第一次制动时加在控制器的力,使平均减速度保持在3m/s2或最大减速度两者中的较低值。在上述A.1.6.1.2.2要求的整个连续制动停车过程中,该控制力必须保持恒定。
A.1.6.3 剩余性能
在Ⅰ型试验结束时,应按与脱开发动机的0型试验相同的条件(尤其是控制力尽可能保持不变,其平均值不超过实际使用控制力的平均值,但温度状况可以不同)测定行车制动装置的剩余性能。
若用减速度表示,剩余性能应不小于0型试验减速度值的60%; 若用制动距离表示,剩余性能应不大于下式计算的制动距离值:
式中:S 1——0型试验测得的制动距离; S 2——剩余性能试验记录的制动距离; a ——0.1
V ——按本附录A.2.1.1或A.2.2.1所规定的制动开始时的初速度。
A.2 制动装置的性能
A.2.1 关于装有仅控制前轴或后轴车轮制动装置的车辆的试验规定。 A.2.1.1 试验规定速度
V=40km/h ①
(L 1与L 2类) V=60km/h ①(L 3 、L 4与L 5类) A.2.1.2 满载车辆制动性能
对于Ⅰ型剩余性能试验(L 3 、L 4与L 5类),应记录制动距离、充分发出的平均减速度以及使用的制动控制力作为性能指标。 A.2.1.2.1 仅用前制动器制动
①
对于最高车速(Vmax )低于45km/h 的 L 1 和L 2 类车,或低于67km/h 的 L 3、L 4和L 5类车,应按0.9Vmax 的速度进
行试验。
②
如因附着力所限,使用单套制动装置不能达到该数值,则在两套制动装置共同作用的情况下对加载车辆进行试验,并
用下列数值代替:L 2 类车为4.4m/s 2,L 3类车为5.8m/s 2,L 5类车为5.0m/s 2。
A.2.1.2.2 仅用后制动器制动
aV
S S 67.067.112-≤
表A.2
A.2.1.3 空载车辆制动性能
如果计算结果表明,制动轮上的质量分配可使每个单轴制动装置能够充分发出至少2.5m/s2的平均减速度,或S≤0.1·V+V2/65的制动距离,则不要求驾驶员驾车实际试验。
A.2.2 关于制动装置中至少有一个是联动制动装置的车辆的试验规定
对于Ⅰ型剩余性能试验(L3、L4与L5类),应记录制动距离、充分发出的平均减速度以及所用的制动控制力做为性能指标。
A.2.2.1 试验规定速度
V=40km/h②(L1与L2类)
V=60km/h②(L3、L4与L5类)
A.2.2.2 车辆应进行满载和空载试验
A.2.2.2.1 仅用联动制动系统的制动
①如因附着力所限,使用单套制动装置不能达到该数值,则在两套制动装置共同作用的情况下对加载车辆进行试验,并
用下列数值代替:L2 类车为4.4m/s2,L3类车为5.8m/s2,L5类车为5.0m/s2。
②对于最高车速(Vmax)低于45km/h的L
和L2 类车,或低于67km/h的L3、L4和L5类车,应按0.9Vmax的速度进
1
行试验。
A.2.2.2.2 所有车型的第二制动装置或应急制动装置的制动
制动距离必须
S≤0.1·V+V2/65(相应的充分发出的平均减速度:2.5m/s2)
A.2.3 驻车制动装置的制动性能(若装有)
即使驻车制动装置与另一个制动装置结合在一起,它也必须能使满载车辆在18%的上、下坡道上处于静止状态。
A.2.4 作用在行车制动装置上的力
手控制力≤200N
脚控制力≤350N(两轮轻便摩托车、三轮轻便摩托车、两轮摩托车、边三轮摩托车)
≤500N(正三轮摩托车)
驻车制动控制力(若装有)
手控制力≤400N
脚控制力≤500N
对于制动手把,手握力作用点假定在离手把外端50mm处。
A.2.5 湿制动器的性能水平(最低和最高)
A.2.5.1 在施加制动后0.5s~1.0s之间,用湿制动器所获得的平均减速度至少应为相同制动力条件下干制动器所得值的60%。
A.2.5.2 所用的控制力(应尽可能快地施加)应相当于用干制动器达到2.5m/s2减速度所需要的控制力。
A.2.5.3 在0型试验过程中的任何时刻,用湿制动器制动的减速度决不能超过干制动器制动减速度的120%。
图A.1 盘式制动器喷水方法
(规范性附录)
装有防抱死装置的两轮轻便摩托车和两轮摩托车的要求B.1 总则
B.1.1 本规定的目的是限定安装在两轮轻便摩托车和两轮摩托车上带有防抱死装置的制动系统的最低性能。
本规定并非强制车辆安装防抱死装置,但如果在车辆上安装了这种装置,那么该装置就必须满足以下要求。
B.1.2 目前这种装置通常由一个或多个传感器、一个或多个控制器和一个或多个调制器组成。如果这种装置的性能至少达到本附录所规定的内容,那么任何不同设计的这种装置均被认为是本附录所指的防抱死装置。
B.2 定义
B.2.1 “防抱死装置”是行车制动装置的一个部件,在制动过程中它可以自动控制车辆一个或多个车轮在旋转方向上的打滑程度。
B.2.2 “传感器”指识别并传递车轮旋转状况或车辆动态状况的部件。
B.2.3 “控制器”指用来分析由传感器传来的数据并将信号传递给调制器的部件。
B.2.4 “调制器”指根据从控制器接受的信号改变制动力的部件。
B.3 系统的特性
B.3.1 每个受控车轮应能至少使其自身的装置进入工作状态。
B.3.2 当装置的电源和(或)电子控制器外电路出现断路时,应通过光学报警信号显示给驾驶员,该信号必须在白天下可见,而且必须使驾驶员便于检查其工作是否正常①。
B.3.3 在防抱死装置失效的情况下,满载车辆的制动性能不得低于本标准附录A中A.2.1.2.1或
A.2.1.2.2所规定的二项要求中较低的一个值。
B.3.4 该装置的工作不得受到电磁场的干扰②。
B.3.5 在任何制动停车过程中,当全部施加制动作用力时,防抱死装置必须保持其性能。
B.4 附着力利用率
B.4.1 总则
B.4.1.1 装有防抱死装置制动系统的L3类车应满足附着力利用率ε≥0.70,这里附着力利用率ε见附件BA中的定义③。
B.4.1.2 应在附着系数不大于0.45和不小于0.8的两种路面上测定附着力利用率ε。
B.4.1.3 试验应在空载车辆上进行。
B.4.1.4 确定附着系数(K)的试验方法和附着力利用率(ε)的计算公式应按附件BA中的规定。B.5 附加检查
应对空载车辆进行下列附加检查
①检验机构应检查电子控制器和(或)驱动系统的可能故障。
②制造厂应向检验机构提供他们的试验方法和试验结果,直到统一的试验方法被批准为止。
③对L1类车,测得的ε值应记录在试验报告中,直到最低值确定为止。
B.5.1 以0.8Vmax但不超过80km/h①的车速在B.4.1.2所规定的两种路面上行驶时,当突然在控制器施加满控制力②时,由防抱死装置控制的车轮不得抱死。
B.5.2 当在控制器上施加满控制力②,从本附录B.4.1.2所述的高附着力路面通过低附着力路面时,由防抱死装置控制的车轮不得抱死。行驶速度和施加制动的时刻应这样确定:防抱死装置整个工作循环
发生在高附着力路面上,当车辆从一种路面通过另一种路面时,车辆速度为0.5Vmax但不超过50km/h。
B.5.3 当在控制器上施加满控制力②,从本附录B.4.1.2所述的低附着力路面通过高附着力路面时,车辆的减速度应在恰当的时间内达到适当高的值,且车辆不能偏离初始行驶路线。行驶速度和施加制动的时刻应这样确定:防抱死装置整个工作循环发生在低附着力路面上,当车辆从一种路面通过另一种路面时,车辆速度为0.5Vmax但不超过50km/h。
B.5.4 两套独立的制动装置装有一套防抱死装置时,应同时使用这两套制动装置进行B.5.1、B.5.2和B.5.3规定的试验,在各次试验中车辆应保持稳定。
B.5.5 在上述B.5.1、B.5.2、B.5.3和B.5.4规定的试验中,在车辆的稳定性没有受到不利影响的情况下,允许有时车轮抱死或极度打滑,当车速低于10km/h时允许车轮抱死。
①在低附着力路面(ε≤0.35),出于安全考虑,可降低初速度,这时应将K值和初速度值记录在试验报告中。
②满控制力指附录A中A.2.4规定车辆类型的最大控制力,如需驱动防抱死装置,可用更大的力。
BA.1 附着系数(K)的确定
BA.1.1 附着系数应在车辆脱开防抱死装置、两轮同时制动且无抱死的情况下由最大制动速率来确定。BA.1.2 应在初速度为60km/h(当车辆不能达到60km/h时,取0.9Vmax)且车辆保持空载(必要的
测试仪器和安全装置除外)的条件下进行制动试验。试验期间控制力保持恒定。
BA.1.3 为了确定车辆的最大制动速率,可以通过改变前轮和后轮的制动力进行一系列试验来找到车轮恰好抱死之前的临界点
(2)
BA.1.4 制动速率(Z )由下式确定
式中:t ——车速由40km/h 降到20km/h 时所测定的时间,s
如果车速达不到50km/h ,应以车速从0.8Vmax 降到(0.8Vmax -20)时所测定的时间来确定制动速率,其中Vmax 是以km/h 为单位的实测最大车速。 Z 的最大值即为K 。
BA.2 附着力利用率(ε)的确定
BA.2.1 附着力利用率定义为防抱死装置工作状态下的最大制动速率(Zmax )与它在脱开状态下的最大制动速率(Zm )的比值。如果每个车轮都装有防抱死装置,每个车轮都必须进行试验。 BA.2.2 Zmax 为按照BA.1.4的要求进行三次试验所测得时间的平均值。 BA.2.3 附着力利用率由下式确定
①装有联动制动系统的车辆可能要制定附加要求。
②为了便于进行这项预备性试验,作为开始步骤,应获得每个单独车轮在临界点前的最大控制力。
t
Z 56.0=
m
Z Z m ax
=
ε