本教程是关于启动和惯导的一些说明教程,但注意英文版有些东西可能跟俄文不一样!
可能有人觉得卡50的启动视频都有了,为甚麽还要介绍啊!这里本人不是说前人教程有啥不好,只是想更深入的做一些补充!要是有些不对的还请大家指出,共同进步!
学习建议本教程首先要了解直升机的飞行原理等基本知识,我觉得这是最难学的!很多书都写得不是很明白。最直观的方法是搞个直升机航空模型看看就知道了。3D模型直升机的控制原理比真的直升机还复杂一些!当然,新手可以到航空模型网上找找看,主要就是一个拉桨距的十字盘,旋翼转速一般变动不大,就靠桨距的改变来改变升力大小和方向。这我就不介绍了!最好还要了解喷气发动机的基本构造!还有个要求就是要大致了解飞机座舱内仪表各表示的是啥,怎麽看。其实要学的只有两个表,ADI和HIS,本教程只需要大家了解ADI 表,其他表要知道指啥!论坛里有座舱表图片的中文说明https://www.doczj.com/doc/b45032346.html,/bbs/thread-174619-1-1.html,最后强烈建议大家装上中文座舱补丁,这容易记住开关的位置和作用!还有看一下3go上的一个自动导航知识的一个教程https://www.doczj.com/doc/b45032346.html,/bbs/thread-178311-1-1.html !
本人的惯性导航教程并很不完全,也很难面面俱到,但那些东西应该很容易可以通过自己的摸索了解,特别是关于导航点和目标点在飞行过程中的编辑等问题,不过这些也很少用到!自动导航和惯性导航有紧密的联系。自动导航是基于惯性导航的,还有HUD显示也一样。需要注意的是在惯导上编辑了以后并不会在GPS上显示,GPS不会有变化!
卡50的启动原理及惯导教程
卡50的启动包括三个部分,设备自检,设备启动,主发动机启动。
这里只以文本形式先介绍介绍主发动机,即旋翼启动的一些原理,自检占不作介绍。
卡50有两个内置电池,电池1和电池2,提供飞机的基本电力,开启后机内大部分设备就可以启动和自检了(貌似只有武器系统不能开启)。打开后,此时APU得到电力,也可以启动了,故要先接通电池一和二。
卡50的发动机是涡轴式发动机,发动机的启动需要前面的涡轮先提供压缩空气,而APU 可以为发动机引气(个人认为在发动机按启动按钮后,APU才开始带动压气机工作),故要先启动APU(apu具体是个什么类型的发动机我也不清楚,反正要烧油),不过APU是不产生电力的(在地面检测设备时可以通过连接涡轮齿轮产生电力,此时可以打开发电机,武器系统就可以打开检查了),电力由涡轴式发动机启动后带动发电机产生,故当发动机完全开启稳定后就可以开启两个发电机了,此后就可以将机载一号和二号电池关闭!而此时涡轴式发动机的空气压缩机也已可以自己旋转产生压缩空气了,APU工作完成了,也就可以关闭了。
由于涡轴式发动机使用微电脑控制的,类似于电子调速,在启动发动机之前必须打开其开关,他将在各种不同的进气和温度等环境下控制发动机的工作状态,保证不同环境下发动机工作在最优条件下。
有关启动的其它的开关也就是油箱、发动机、APU等的油门阀,刹车开关等就没有太多要说的。需要注意的是左手边上的cut-off valve lever和fuel shut-off valve的区辨! fuel shut-off valve是接通油箱与左右发动机的开关,而cut-off valve lever是向发动机燃烧室供油的开关,通常要等发动机已经有一定转速,压气机开始工作后才能向燃烧室供油点火,故当发动机启动转速到达大约20%在向发动机供油,此时发动机继续转速上升到怠速状态!
还有发动机和APU可以在地面直流电的供应下启动,就是不打开机载电瓶,发动机和所有机载设备也可以正常工作!不过变流器要打开,这是因为发动机启动和很多设备几乎都需要交流电源。如果只打开地面交流电源供应,此时变流器就不需要了,不过机载电瓶这时又必须打开,我认为可能是因为变流器只能把直流变交流,故此时变流器没工作!可以肯定的是变流器开关打在自动位置永远没错!
APU和发动机还有Crank 和 False Start,False Start为地面不点火试车,检查APU或
发动机启动时一些设备的工作。Crank start为消除APU或者发动机内的油量,在启动面板的有此选择开关,在这就不多介绍了!
关于启动的其他方面就不多做介绍了!下面只介绍惯导启动和应用的一些方面问题!
惯导的介绍
惯导主要惯导的基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。简单的说就是从飞机的传感器得到加速度,速度,航向等等信息,从一已知点开始,通过导航计算机对这些信息的不断计算,得出飞机的位置!惯性导航系统有如下主要优点.(1)由于它是不依赖于任何外部信息.也不向外部辐射能量的自主式系统.故隐蔽性好已不受外界电磁干扰的影响;(2)可全天流全球、全时间地工作于空中地球表面乃至水下.(3)能提供位置、速度、航向和姿态角数据,所产生的导航信息连续性好而且噪声低.(4)数据更新率高、短期精度和稳定性好.其缺点是.(1)由于导航信息经过积分而产生.定位误差随时间而增大.长期精度差;(2)每次使用之前需要较长的初始对准时间;(3)设备的价格较昂贵;(4)不能给出时间信息!
卡50的惯导设备主要为PVI-800惯导系统!可进行导航点的选择,编辑,导航点方位显示,目标点方位显示,虚拟飞行,惯导校正等工作!注意HIS表和HUD上的导航信息直接和惯导联系!
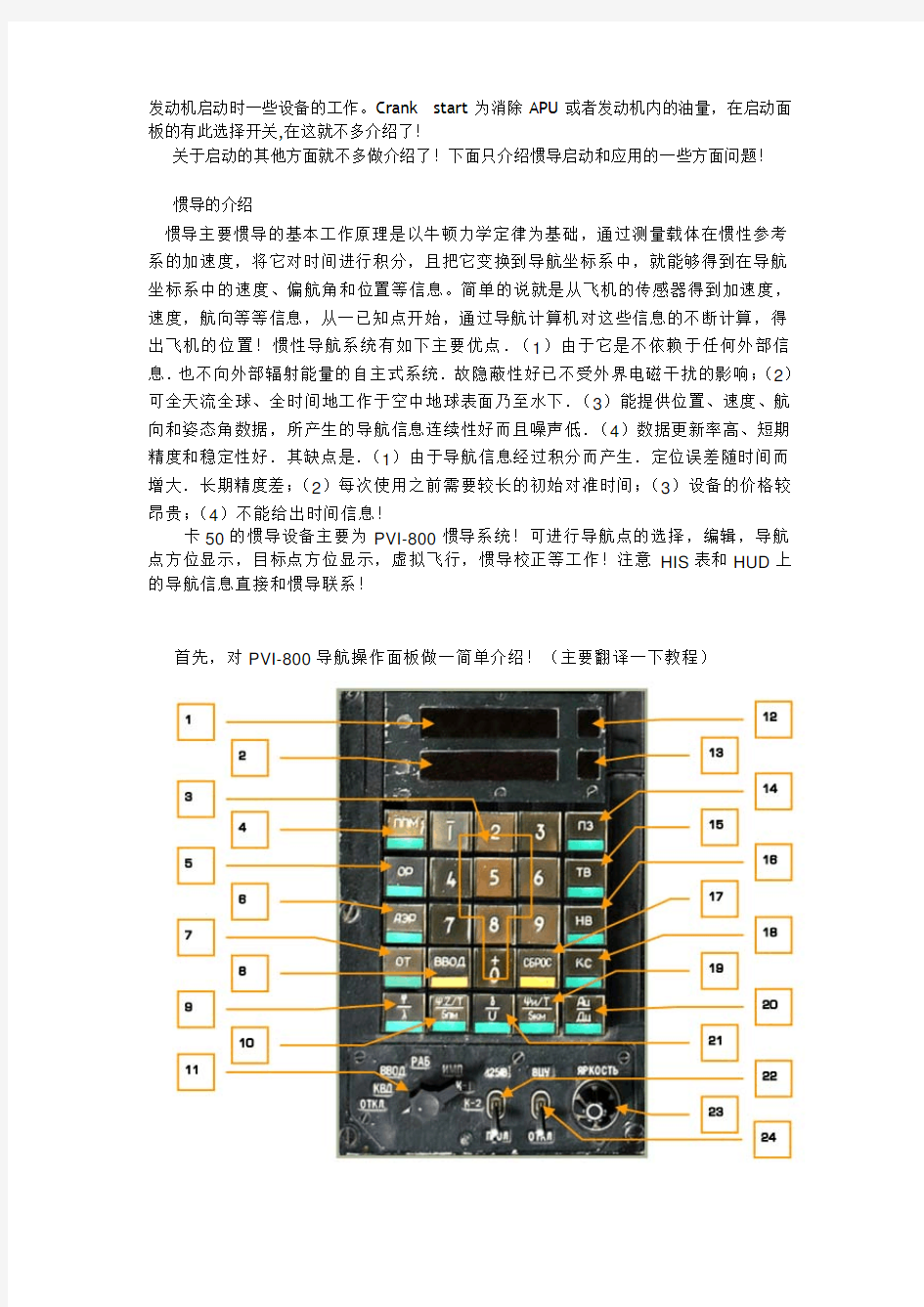
首先,对PVI-800导航操作面板做一简单介绍!(主要翻译一下教程)
1,上部显示面板
2,下部显示面板
3,数字按钮
4,导航点按钮。11在通常模式的位置下,选择此按钮,在选择你要的导航点(数字按钮)此导航点的纬度将显示在上面板上,经度信息将显示在下面板上,12窗口将显示你选择的导航点号码!同时你的HIS和HUD也将指到这一导航点(HIS表和HUD显示的为惯导信息,与GPS无关)
5,用于更新的参考点,用于选择一个更新参考点,最多4个更新参考点可以在任务编辑中设定。
6,基地按钮,当要返回基地时使用的按钮!在游戏中只有两个,1是起飞基地,2是降落基地,要是在任务中没有指定起飞机场和降落机场这个按钮就没用。
7,目标点按钮。这个按钮用于选择一个目标点或者输入一个目标点,总共可以保存10个目标点,目标点可以定义为飞跃点或者为SHKVAL 锁定点。显示方式同上。
8,ENTER 按钮,跟电脑一样,用于输入数据。
9,我机坐标按钮。
10,显示当前导航点的计划航迹角或偏航,距离,时间信息。(DH和DT模式开关在自动驾驶控制面板上)
在DH sub-mode 模式下:
注意这里和下面都按了导航点按钮。
在DT sub-mode模式下:
11,PVI控制模式选择开关。
“ОТКЛ”为关闭PVI-800系统。
“КВД”为输入数据的确认按钮。这种模式允许你检查一个导航点的坐标和其他数据而同时不必要改变正激活的导航模式和导航点!
“ВВОД”编辑导航点。这个功能允许你输入导航点的相对坐标,风的情况及其他数据。方法如下:
选择编辑
按下“ППМ”此时上部面板会显示现在储存的所有导航点的信息。
按下1-6键选择需要编辑的导航点,此导航点会显示在面板上。
使用键盘输入新的导航点的坐标。注意输入前要先指明是南北半球,和东西方向。
要输入正号先按0键;要输入符号先按1键,当输入为负号时,”-“号将显示在坐标前面。
当坐标被输入时,按确认键,或者按CANCEL键清除面板上的数据。
“РАБ” =OPER,既一般模式。
“ИМП”模拟飞行模式。这个模式将以虚拟的1000KM/H的地速模拟输入的导航计划,这个可以被用来检查所有的方位,距离,还有准备飞行前的所有数据。
“К-1”, “К-2”没有使用的模式。
12,导航点显示
13,机场编号,固定点,目标点或者坐标校正点编号显示。
14,“ПЗ”复位按钮,内部导航系统在飞行过程中重新校正的按钮,再此没有作用。
15,“ТВ”精确校正按钮,惯导的精确校正。这个将重新定位惯导的回旋罗盘,并将使用heading finding function来进行精确的定位,这种校正大约要花费30分钟完成。
16,“НВ”,一般校正按钮,惯导的一般校正。
17,“СБРОС”重拨按钮。在编辑模式下,按下这个按钮将会清除输入的数据。18,“КС”初始点坐标按钮。按下这个按钮将会显示你的初始点坐标并且允许你输入一个新的坐标。在默认情况下这一点坐标来自任务编辑中。在这种情况下,起始点和我机坐标是同样的。显示方式也是同上显示坐标。
19,“Ψи/T/Sкм” 实际航向/时间/距离按钮。在各种模式下指示离最后导航点的实际航向,时间和距离。
20,“Ац/Дц”离目标点的航向距离按钮。在入口模式表示离目标的航向、距离。
21.“δ/V”风向风速按钮。显示风的方向和风的速度。使用气压风速,同导航风
速相差180°。
22,“И-251В - ПРОЛ”(I-251V Shkval – Fly over INU update)更新模式选择。为INU 校正的模式。当拨到“N-251B”,INU将通过SHKVAL光学仪器校正。当拨到”Npon”,惯导将通过跨越一个参考点校正。
23,“ЯРКОСТЬ”亮度调整旋钮。
24,“ВЦУ - ОТКЛ”数据链开关。场外目标数据链接开关按钮。
面板显示内容如下表:
惯导在一般模式的使用方法!
当你在游戏编辑时设置了一系列的导航点(最多6个),目标点(最多十个),两个机场点,还有惯性矫正点(最多四个),风向风速之后,进入游戏,这些信息将被记录在惯导和GPS导航内!
飞机启动之后,要打开K-041系统(注意:不仅仅是个瞄准系统, K-50的PrPNK “Rubikon”(K-041) 飞行、导航和目标系统是由一些数字、模拟系统及空战信息处理器组成,它以5台计算机为基础:4台BL VM-20-751计算机用于指示作战、导航,数据显示及目标识别,另一台BCVM-80-30201计算机用于武器控制,一台UVV 20M-800数据传入和传出设备。)电源开关,IUN电源开关,导航系统开关,这些开关之间联系还是有些问题没弄清楚,但准备飞行前最好都要打开!
将惯导控制面板上的11模式选择旋钮选到通用即一般工作模式下!按下4,在按下对应的数字按钮,对应的导航点就会在HIS表上和惯导显示面板上显示,就可以飞到对应的导航点,但GPS上的HIS表不会跟着变化!此时在非自动模式下,飞到一个导航点后导航点不会自动跳转到下一个导航点。需要手工选择。
其他方面的使用可以通过上面的翻译自己摸索!很多跟自动导航有关,要编辑时11旋到编辑模式,输入数据后按8,重新输入按一下17!
关于自动飞行面板
1为俯仰保持!
2为倾斜滚转保持!
3航向航线保持!
这三个感觉都是提供阻尼的!(减缓飞机姿态变化造成的周期振荡)
4高度保持!
5飞行指引模式/Flight Director Mode FD模式的作用为断开角度保持,FCS将不会继续使用20%的权限来保持姿态。但是会继续提供Damper(阻尼效应),来减少操作以及直升机先天的不稳定性带来的周期震动。
FD模式经常在控制直升机进入所需的火箭发射姿态,规避机动,以及飞行表演时使用。
当FD模式启动时,HUD上会显示俯仰滚转指示标和高度指示标,以帮助你飞到导航点。
具体怎麽看就不介绍了!
6为高度保持方式,向上为气压高度保持,向下为雷达高度保持!
7为DH和DT模式选择开关!Desired Heading 和 Desired Track Angle!在自动导航模式下,DH为飞机直接从当前位置飞到导航点,DT为先飞到航线再沿航线飞到导航点!当在非自动导航模式下,HIS表上的Desired course(两个黄色方块)指示不同,DH模式下直
接指到导航点,DT模式下指式的是比较好拦截航线航向,将飞机的航向指向两个黄色方块可以很快飞到航线上!
关于自动导航
首先要将航向选择器拨到中间Directional Gyro陀螺方向仪位置!
此时要关闭FD模式!
HIS表也要在自动位置。
惯导上要显示导航点的信息!
将桨距控制拉杆上的路径模式开关前拨就打开了自动导航!R键
自动导航的两种模式DH和DT模式已经说过了!在不同模式下左前方告警面板上会显示不同的灯,在DH模式下飞机飞到导航点以后才会转向新的导航点,在DT模式下飞机会自己估算一下,在飞到导航点之前一点就自动转向下一个导航点。惯导显示面板上的导航点也会自动变化。
要是此时将惯性导航面板上的显示信息改为目标点或者机场,则飞机就会朝着这些地方自动转向!HUD也就会显示相应的信息!当然正确的顺序是要先关闭导航模式,就是将路
径模式开关后拨!再将惯导显示面板上的数据改为目标点或者机场,此时再次打开路径模式开关,飞机会自动飞向目标点或机场!
当飞机飞跃最后一个导航点或目标点、机场2千米以后,路径模式自动关闭,飞机保持航向飞行!
将惯性导航上的所有按钮都熄灭以后,即无工作模式,此时开启路径模式开关,飞机会保持现有的飞行参数飞行!要改变飞行参数可以按下微调键,调整好飞行状态后,放开微调键!
飞行过程中导航点顺序的调整。(感觉作用不大)
关掉路径模式,关掉惯导面板上的导航点按钮并重新打开后选择你想要的第一个导航点,如果是原来的3号导航点就按3,再按下确定键,按同样的方法确定下一个导航点。完成后关掉导航点按钮,新的信息已经储存下来了,再次按下导航点按钮新的信息开始显示!
惯性导航的矫正!
惯导最好在40分钟左右矫正一次,矫正方式有两种,一种是飞在矫正点头顶矫正一次,一种是使用I-251V Shkval光学仪器较正。
飞跃矫正需要将22选择到跨越矫正位置!
到飞机飞到离参考点18千米内EKRAN会发出一个声音信号并显示“ПРОВЕДИКОРРЕКЦКООРД” (Perform Coordinates Correction)
在PVI-800上按下5号按钮,在选择所对应的矫正点数字按钮,将22选择到跨越矫正位置。再飞到矫正点上空,按下飞机摇杆上的“ЦУ”按钮(O键)。这时会将导航面板上显示的坐标定位飞机此时位置的坐标!
当矫正完成后,“ОР”键就是5号按钮和矫正点号码都不会再亮!
使用I-251V Shkval光学仪器较正,同样先选择矫正点,再将矫正方式选为“И-251В”,目视确定矫正点的位置,再将目标模式控制面板上的“ИЗЛ – ОТКЛ” (Laser standby
– Off) 拨到“ИЗЛ” (Laser standby).(激光指示器待命)
图中的9号按钮!
按下飞机摇杆上的“ЦУ”按钮,激活Shkval的传感器,将shkval的图标移动到参考点,调整跟踪窗口的大小按下螺距控制杆上自动锁定按钮锁定(回车键)矫正点上的标志物。
8号键。
当Shkval显示“ТА”(自动追踪)。再次按下摇杆上的“ЦУ”按钮,电脑此时开始计算并矫正惯性导航!当矫正正在进行时HUD上会显示“КОРР”(矫正)。当矫正完成后,按下“СБРОС”(重设)按钮,即瞄准系统重设。(上面的目标模式控制面板中的10号按钮) 此时将会清除HUD上的“КОРР”(矫正)信息,关闭PVI-800导航面板上的矫正点显示并关闭(shkval)。最后附上告警灯上的信息显示表,翻译了和导航有关的内容!
惯性导航技术的工作原 理 Document number:PBGCG-0857-BTDO-0089-PTT1998
惯性导航系统基本工作原理 惯性导航系统是十分复杂的高精度机电综合系统,只有当科学技术发展到一定高度时工程上才能实现这种系统,但其基本工作原理却以经典的牛顿力学为基础。 设质量m受弹簧的约束,悬挂弹簧的壳体固定在载体上,载体以加速度a 作水平运动,则m处于平衡后,所受到的水平约束力F与a的关系满足牛顿第 二定律: F a m 。测量水平约束力F,求的a,对a积分一次,即得水平速 度,再积分一次即得水平位移。以上所述是简单化了的理性情况。由于运载体不可能只作水平运动,当有姿态变化时,必须测得沿固定坐标系的加速度,所以加速度计必须安装在惯性平台上,平台靠陀螺维持要求的空间角位置,导航计算和对平台的控制由计算机完成。 陀螺仪组件测取沿运载体坐标系3个轴的角速度信号,并被送入导航计算机,经误差补偿计算后进行姿态矩阵计算。加速度计组件测取沿运载体坐标系3个轴的加速度信号,并被送入导航计算机,经误差补偿计算后,进行由运载体坐标系至“平台坐标系”的坐标变换计算。他们沿机体坐标系三轴安装,并且与机体固连,它们所测得的都是机体坐标系下的物理量。 参与控制和测量的陀螺和加速度计称为惯性器件,这是因为陀螺和加速度计都是相对惯性空间测量的,也就是说加速度计输出的是运载体的绝对加速度,陀螺输出的是运载体相对惯性空间的角速度或角增量。而加速度和角速度或角增量包含了运载体全部的信息,所以惯导系统仅靠系统本身的惯性器件就能获得导航用的全部信息,它既不向外辐射任何信息,也不需要任何其他系统
学校课程—声乐课方案 一、背景 学校,核心就是课程,而若要打造品牌学校就要有特色的学校课程。每位老师都有自己的不同爱好和特长,为了对学校打造品牌教育尽一份力,根据我们的特长---声乐。老师共同认领有关声乐的学校课程并集体备课研究。 意义: 1、和谐教育的要求,归根结底,是德、智、体、美、劳五育并举,把学生培养成全面发展的人才,并培养学生的创新精神和创造意识。而学习歌唱好处多多,歌唱是人类自古以来的一种本能。是人们很好的一种情感表达方式。一个不会唱歌的人,是很难以想象的。也是不适应时代和社会的要求的。而生活中经常喜欢唱歌,喜欢音乐的朋友,会有更多的快乐,有更多和朋友交往的机会。通过歌唱的学习过程,进一步去学习音乐的基本知识和基本技能,提高审美的能力,从而培养健康的审美情操。 2、审美:声乐艺术,是一种审美的艺术,不管什么歌曲,都紧紧围绕着生活,围绕着我们的情感。在歌曲中,我们体会着喜、怒、哀、乐等各种情绪,在潜移默化中,培养我们一定的审美习惯和
审美观点。“这首歌真好听,”“我最喜欢唱这首歌了,”这其实就是一种审美取向的体现。久而久之,形成我们特定的审美思想。 3、教育:歌曲内容所表现的范围,是很大的。除了体现一定的思想,情感,方针,政策等。之外,还有许多生活、科学小知识。唱歌的过程,也是一个学习知识的过程,有研究表明,唱歌,能够开发人的智力,使人脑更聪明。 二、课程目标: 情感态度与价值观:培养学生一定的审美习惯和审美观点。体验不同情绪的音乐,能够自然流露出相应表情或作出体态反应,体验并说出音乐情绪的相同与不同。 过程与方法:学习声乐,教会学生学习科学的用嗓,要懂得保护自己的喉咙,不乱喊乱叫,同时,提高学生的发声质量,使他们的声音更圆润,更甜美。 引导学生能够配合歌曲、乐曲用身体做动作。能够在律动、集体舞、音乐游戏、歌表演等活动中与他人合作。 知识与技能:能够用自然的声音,按照节奏和曲调有表情地独唱或参与齐唱。能采用不同的力度、速度表现歌曲的情绪。每学年能够背唱歌曲4~6首。 感受自然界和生活中的各种声音,能听辨女声和男声。能够区别独唱、独奏、齐唱、齐奏。 三、课程内容及评价方式:
教你如何安装车载导航仪地图 2013-03-08 15:30:04| 分类:汽车知识| 标签:|字号大中小订阅 本文转载自闲人SGM《教你如何安装车载导航仪地图★》 地图安装步骤 一、下载工具: “凯立德官方检测工具”(检测DVD导航仪的物理端口、波特率)、或车载专用GPS端口测试工具、“GPS空闲端口检测工具”、“GPS硬件系统检测工具”。 二、准备一张TF卡。 4G卡,只能装一个地图; 8G卡,可能装两个地图; 16G卡,可能装四个地图; 32G卡,可能装多个个地图,或4个地图,外加音乐、视频等。 三、将上述三个软件都复制到新的TF卡根目录下, 进入导航机设置—“导航路径设置”,指向、启动这个软件里的.EXE文件,可分别测得: 导航仪的物理端口、波特率数值;导航仪的空闲端口号; 导航仪的硬件系统情况,如:操作系统类别、CPU类型及频率、内存、屏幕分辨率等。 四、依据本机系统情况,选取下载合适你机器的地图,“GPS之
家”、“我爱GPS”论坛里,有很多破解的地图软件可下载。 注:新卡重新安装,应该下载完整版或懒人包。而不是地图资源。 五、将下载的地图压缩包解压缩,再其文件包复制到TF卡根目录下。 修改端口号、波特率为:COM2(假若2为你的机器端口数字) ;4800(假如你的机器波特率为4800) 以下都以COM2 ;4800;的数值为例,来讲解。你则依据自己实际测得的数值为准。 A、凯立德:使用其内附的修改器 具体步骤如下: 第一步打开凯立德地图文件夹; 第二步打开“NaviResFile”文件夹 看到“NaviConfig.dll” 文件 打开“凯立德端口修改器”,点修改器里的“读取”,读取成功后,修改端口成:COM2,速率:4800。再点“修改”按钮,再按“退出”按钮。 在“NaviResFile”文件夹内会生成一个叫“NaviConfig-NEW.dll” 文件。 删除原“NaviConfig.dll” 文件; 将“NaviConfig-NEW.dll” 文件改名为:“NaviConfig.dll” “凯立德端口修改器”保留不删除。
音乐特色课程设置 一、音乐艺术特色课程设置的必要性 1、培养音乐艺术人才,为高等艺术院校输送人才,也为学生拓宽考试渠道,开辟升学路子的需要。高等院校招收音乐艺术专业的特长学生,必须加试考查音乐艺术特长。音乐特色课程的设置,保证了音乐艺术教育的实施,使之严格按照要求科学地进行训练,提高音乐素质,提高专业水平。 2、建设音乐艺术特色学校的需要。建设音乐特色学校,培养特长生,实现特色教育,就必须落实到课程上。有了设置科学的课程,才能保证特色学校的顺利有效的进行。 3、弘扬民族文化,推广民歌艺术的需要。 音乐艺术特色课程的设置,确保民歌艺术特色教育的实施,为培养音乐艺术人才提供保证,为弘扬民族文化做贡献。早在2005年国务院办公厅就明确指出:“通过社会教育和学校教育,使非物质文化遗产代表作的传承后继有人”,由此看出,国家对学校教育提出了明确要求。有条件的学校创建音乐艺术特色学校,设置音乐艺术特色课程,将音乐特色课程设置纳入教学科研工作中、就能在教学和科研体系中建立音乐学习、传播、研究和创新的架构与平台,发挥学校教学、科研的职能和优势就能积极实施民族优秀文化的广泛传承、深入研究和不断创新。 二、音乐特色课程的资源开发利用。 (一)、结合学校特色,大力开发校园音乐资源。 校本课程开发与创建特色学校是相辅相成的。学校要真正办出自己的特色,就必须在课程开发上下功夫,要有体现音乐特色的课程设置。音乐校本课程的开发实际上就是在构建学校自身的特色,而课程的编制反过来也应根据学校自己的性质、需要、特点和条件进行。开展特色教育,要遵循“合格+特色”的学生培养模式。合格就是按照高考要求,培养高等院校音乐艺术类招生合格的人才。特色,就是要培养学生在音乐专业中有特长,有一门强项。根据音乐高考纲要,开设相应的试唱课、器乐课、乐理课,利用校园橱窗、黑板报、广播、校园电视,展示音乐专业班学生的演出,举行音乐会,开展各种音乐比赛,如校园歌手大奖赛、革命歌曲大奖赛。促进校园音乐资源的利用,培养学生音乐专业特长。 (二)、结合学生实际,挖掘学生自身资源 学生的学习渠道是多方面的,他们联系着一个庞大的社会资源。学生的学习经验来自他们的家庭生活,来自他们与其他孩子的游戏与交往,来自他们与社区环境、及文化的体验与影响,他们往往会把这些渠道获得的知识带到课堂上,通过合作学习把教材、教师、学生三方面的资源整合在一起,增大教育的信息量,丰富教学容。这些经验与经历,都是教学中宝贵的资源。教师应针对不同特点,善于挖掘学生的智慧和学习性,为教学所用,使教学更生动更有效的开展。学生家庭中往往也有不少音乐课堂教学中可利用的资源。另外,学生的生活是丰富多彩的,音乐是情感的艺术,音乐对人的影响力是巨大的,它能直接而强烈的影响人的情感,触及人心灵深处。音乐特色课程课程可以结合学生的实际生活进行教育。(三)、结合地方特色,收集当地民间娱乐活动民歌民谣等资源 校外课程资源是学校课程资源开发的重要组成部分。优秀的特色的地方资源作为开发校本课程的素材,既可以激发学生对家乡的自豪感,也能促进学生学习的主动性、创造性。1.民歌民谣 《十送红军》《采红菱》《回娘家》等这些民歌歌谣都是非常喜爱的歌曲,当地也有许多群众喜爱的,广泛流传的民歌民谣,教师可选取比较短小、精悍、易唱易记、积极向上的民歌编辑进教材,学生学起来一定非常有兴趣。 2.民间娱乐活动
2008年8月 第36卷第4期 现代防御技术 M ODERN DEFENCE TECHNOLOGY Aug.2008 Vo.l36No.4 导航、制导与控制 辅助惯性导航系统的方法和算法发展* 武虎子,南英,付莹珍 (南昌航空大学航空与机械工程学院,江西南昌330063) 摘要:综述了辅助惯导的一些主要算法和方法,主要有:重力辅助的匹配方法、基于衰减记忆的匹配算法、基于贝叶斯算法、基于神经网络算法、基于迭代最近点算法、无线电高度与数字地图辅助方法、粒子滤波算法、声呐技术辅助方法、概率数据关联算法、成像激光雷达辅助方法。分别对各类辅助算法和方法的基本原理、主要优缺点进行了简要介绍,展望了辅助算法和方法的发展趋势。 关键词:惯性导航系统;辅助算法;辅助方法;发展趋势 中图分类号:V448122+4;U66611文献标识码:A文章编号:10092086X(2008)20420062206 The Developm en t of A i ded A l gor ithm and M ethods i n Iner ti a l N avi ga ti on Syste m WU H u2z,i NAN Y i n g,F U Y ing2z hen (Nanchang Un i versity of Aeronautics,School of Aero nauti c and M echanical Engi neeri ng,Ji angxi Nanchang330063,Ch i na) A bstra ct:So me main a l g orithms and methods i n a i d ed2inertial navi g ati o n are summ ar iz ed.They can be c lassified as f ollo ws:gravity a i d ed matchingm ethod,match i n g algorithm based on FadingMe mory,a l2 gorithm based on Bayes Rule,a l g orit h m based on A rtificial Neura lN et w ork,algorith m based on iterative closest poin,t a i d ed method of w ire less he i g ht and d i g italmap,partic le filter algorithm,aided m et h od of sonar technology,probab ilistic data association filter algorith m,a i d ed method of i m agi n g laser radar.The main pri n ciple and ma i n advantages and disadvan tages of a ll k i n ds of a l g orit h ms and methods are i n tro2 duced si m p l y and separately.The develop men t trend of the m is prospected. K ey words:i n ertial navi g ati o n syste m(I N S);a i d ed a l g orithm;a i d ed m et h ods;deve lopment trend 0引言 随着导航技术的逐渐成熟,飞行器对自主导航精度的要求也越来越高,因而辅助惯性导航方法与算法也快速兴起。所谓辅助惯性导航系统(i n erti a l navi g ation syste m,I N S)的方法与算法,就是一种能提高惯导导航精度的方式和途径(如导航精度参数CEP,S EP,R,R MS等达到规定的范围内)。采用这些方法与算法可以重调和校正单一的惯导系统(如位置和方位的重新调整、陀螺漂移的校正)。 在过去的几十年里,辅助惯性导航技术已经有了很大的发展。其辅助算法都可以通过建立数学模 *收稿日期:2007-12-01;修回日期:2008-02-12 作者简介:武虎子(1981-),男,陕西富平人。硕士生,研究方向为飞行控制与导航。 通信地址:330063南昌市丰和南大道696号南昌航空大学航空与机械工程学院
打造音乐学科特色推动学校健康发展 扶沟县实验小学 一、总体思路 当前,基础教育正进行着人事制度改革和新一轮课程改革,这为学校特色创新提供了新的机遇,特别是国家课程、地方课程、校本课程三级课程的设立,更为创建特色学校提供了丰富的教育资源。目前,我校已基本上实现了管理体系科学化、教学体系整体化、教育体系网络化的目标,具备了特色创建的基础条件。在集思广益的基础上,我们对学校实际进行客观分析,认清优势和劣势,合理选择和打造优势项目,构筑学校新的可持续发展的平台,以培养学生的创新精神和实践能力为核心,加大课程改革力度,强化个性特长培养,提高学生的综合素质。为彰显学科个性,培养学生特长,建设音乐特色学校,推动学校健康发展,我校推出了“科科抓质量,每科出特色”这一重要举措,推行“爱我所选,选我所爱”的教学模式,营造“事事有人做,人人有事做”的良好氛围。 二、背景介绍 长期以来,传统的教育观念和教学模式束缚着学校的教育教学改革和发展,学校教育存在的一个突出问题,就是共性太多,个性太少。抓特色建设,创特色学校,是新形势下全面贯彻教育方针,深入实施素质教育,深化教育教学改革的一项重要工作,也是优化学校管理,丰富学校内涵,提升办学品位的重要举措。建设特色学校,打造独具魅力的艺术校园,是实验小学发展的必经途径和选择。两年来,我校师生积极探索,深入实践,寻求到了适合我校实际的特色教育有效途径-----以“爱我所选,选我
所爱”的模式打造实验小学学科特色,并由此开辟出了一块我校音乐特色教育新天地。 三、决策过程 (一)完善方案 为了制定出科学合理的方案,我们走群众路线,集思广益,然后汇总确定:教研组长研讨开会——拟定音乐特色活动内容——教师进行讨论——行政班子汇总意见——完善音乐特色活动 方案。 科学的制定出适合我校的活动方案,为实验小学的音乐特色创建打下了坚实的基础。 (二)强化管理 1、明确目标。教师根据学校创建方案,制定出个人特色项目申报计划,帮助大家确定合理的发展目标。 2、责任到人。我们将计划中的各项任务落实到各个职能部门及教研组,责任到人,明确要求,完善奖惩制度。我们将音乐特色活动的六大类分工到各负责人,合唱、吉他由李明国老师负责,电子琴由杜艳丽老师负责,民舞、啦啦操由段春婷老师负责,鼓号队由金世婴老师负责。 3、按时检查。各学科负责人按周对各项目组活动情况进行检查,教务处按月对各项任务的达成情况进行反馈调查,各项工作都要求做到有计划、有总结、有过程资料。 4、人本管理。树立服务意识,进行人本管理。以情动人,以理服人,使教师遇到困难时得到帮助,获得成功时能得到祝贺。为大家创造良好的工作环境,让教师真正把创建音乐学科转化为自己自觉的工作行为。 5、考核促进。以考核促进活动开展。教师特色学科活动的教学资料检查结果计入教师期末常规教学资料检查成绩;期末教
装个导航多少钱 给自己的爱车装个导航是再正常不过了,但是一不小心还是容易上当受骗的,找到一家可靠的公司如郑州博士通科技这样的也是不易的事,总之希望我们在给自己的爱车装导航的时候还是多长个心眼。倒车影像系统,经过多年的发展,从简单的倒车雷达系统到可视倒车影像系统,已经实现了从原来光听声音来辨别到视频可视化,无论从性能上,直观上,还是使用效果上,都是步入了历史性的实破,不管从结构和外观上,还是从性能价格上,如今的倒车影像系统产品都各有特点 接下来我们再讲一些汽车保养的一些小知识: 一、发动机部分: (1)起动发动机,倾听发动机在怠速、中速和高速运转时有无杂音异响。 (2)检查风扇皮带的松紧紧度,并进行调整。 (3)检查、清洗化油器、汽油泵、汽油滤清器、空气滤清器(视需要更换机油)。 (4)检查气缸盖,进、排气歧管及消声器的连接紧固情况,检查并紧固发动机固定螺栓、螺母及飞轮壳螺栓。 (5)清洁机油粗、细滤清器及滤芯,放出滤清器中的沉淀物,检查机油的多少和质量,检查润滑系(接头)有无漏油现象,紧固油底壳螺栓。 (6)检查空气压缩机的固定情况及管道有无漏油、漏气,排除贮气筒内的油水及污物。 (7)检查散热器、水泵固定情况及水管有无渗漏、百叶窗的效能及水泵
轴加润滑脂的情况 二、离合器和传动部分: (1)检查离合器效能及底盖螺栓,踏板选种,踏板轴加润滑脂。 (2)检查变速器紧固情况,油平面及有无漏油现象,根据需要添加齿轮油。 (3)检查万向节、传动轴、伸缩套、中间轴承及支架、拖车钩等紧固及润滑情况。 (4)检查手制动器工作情况,必要时调整工作行程,制动蹄销加注润滑脂。 (5)检查主减速器壳有无漏油现象,检查油面,必要时加齿轮油。 三、前桥部分: (1)检查前制动鼓有无漏油现象,检查并调整前轮毂轴承的松紧度,检查转向节和主销工作情况,并加注泣滑脂,紧固轮胎螺栓、螺母。 (2)检查转向器,加注润滑油,检查、调整方向盘的转动量和游隙,检查转向横、直拉杆,直拉杆臂转向臂各接头的迦接和紧固情况,并加注润滑脂。 (3)检查减震器固定情况,钢板弹簧有无折断,钢板销加注润滑脂,检查骑马螺栓与螺母的螺母的紧固情况。 (4)紧固前保险杠、翼板、发动机罩、脚踏板、驾驶室螺栓、螺母,检查制动器室连接情况并紧固螺栓、螺母,制动凸轮轴加注润滑脂。 (5)检查前轴(工字梁)有无弯曲、断裂现象,检查和调整前束。
导航升级不求人(此操作步骤只针对有卡的导航系统并且内存卡不能小于8G) 随着道路的不停建设,道路的不断变化老版地图已经无法指引最便捷的道路,所以各大地图厂商每年都会对自家的地图做升级。大家都知道去4S店升级地图是要收费的,从几十元到几百元元不等,今天比较清闲就写一个操作步骤。希望大家可以受用。 1、首先下载最新的地图包,我推荐的免费网站。 2、去下载你需要的最新版本的地图包,或者主程序(主程序一般不用更新,主程序的作用 是用来运行地图包的!)以凯立德地图为列。
3、因为不同品牌的导航仪,端口和比特率是不一样的,所以我们还要在网站下载两个很实 用的工具。 4、我来解释一下上面两个工具,GPS端口检测是用来测试你这在导航仪的端口和比特率。 GPS端口修改器是用来修改你主程序中的端口和比特率,达到和你车载导航一致的端口和比特率才能运行地图。 5、具体的操作步骤:GPS端口检测是要拷贝在卡上面插到导航仪里面运行的。进入车载界 面找到导航路径运行GPS端口检测软件。(不同品牌导航仪点击路径的位置不同,但操作方法一样。我拿我家了两台车的路径做例子。) 6、第一辆车操作步骤:点击导航路径,点击GPS.EXE(就是端口检测软件),这个时候我可以 看到端口COM1,比特率4800(一定要记住,写下来。)这个就是你车载导航的信息。
第二辆车的操作步骤:点击导航设置,然后点击导航文件路径,选择GPS.EXE查看端口和比特率。此时显示端口COM2和比特率4800(把它记下来)。
7、 下一步把你从网站下载好的最新地图包覆盖替换掉老的地图文件。
8、也就是把最新地图文件黏贴到上面的那个文件夹里面,覆盖替换。(所有的最新地图和 运行主程序都在这个文件夹里面),好了现在地图就更新完毕了。 9、现在需要修改端口和比特率了,只有和导航仪一致才能在你的车上运行。 10、点击电脑上面下载好的GPS端口修改器 出来以下界面,点击打开找到NaviConfig.dll文件打开。
惯性导航的工作原理及惯性导航系统分类 惯性导航系统(INS)是一种自主式的导航设备,能连续、实时地提供载体位置、姿态、速度等信息;特点是不依赖外界信息,不受气候条件和外部各种干扰因素。 惯性导航及控制系统最初主要为航空航天、地面及海上军事用户所应用,是现代国防系统的核心技术产品,被广泛应用于飞机、导弹、舰船、潜艇、坦克等国防领域。随着成本的降低和需求的增长,惯性导航技术已扩展到大地测量、资源勘测、地球物理测量、海洋探测、铁路、隧道等商用领域,甚至在机器人、摄像机、儿童玩具中也被广泛应用。 不同领域使用惯性传感器的目的、方法大致相同,但对器件性能要求的侧重各不相同。从精度方面来看,航天与航海领域对精度要求高,其连续工作时间也长;从系统寿命来看,卫星、空间站等航天器要求最高,因其发射升空后不可更换或维修;制导武器对系统寿命要求最短,但可能须要满足长时间战备的要求。涉及到军事应用等领域,对可靠性要求较高。 惯性导航的工作原理 惯性导航系统是一种自主式的导航方法,它完全依靠载体上的设备自主地确定载体的航向、位置、姿态和速度等导航参数,而不需要借助外界任何的光、电、磁等信息。 惯性导航是一门涉及精密机械、计算机技术、微电子、光学、自动控制、材料等多种学科和领域的综合技术。其基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度、角加速度,将它对时间进行一次积分,求得运动载体的速度、角速度,之后进行二次积分求得运动载体的位置信息,然后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位置信息等。百度搜索“乐晴智库”,获得更多行业深度研究报告 惯性导航系统分类
手把手教你怎样安装车载导航仪地图 来源:今日头条编辑:袁春苗2014-04-23 10:14 浏览量:10330 教你如何安装车载导航仪地图 地图安装步骤 一、下载工具: “凯立德官方检测工具”(检测DVD导航仪的物理端口、波特率)、或车载专用GPS端口测试工具、“GPS空闲端口检测工具”、“GPS硬件系统检测工具”。 二、准备一张TF卡。 4G卡,只能装一个地图; 8G卡,可能装两个地图; 16G卡,可能装四个地图; 32G卡,可能装多个个地图,或4个地图,外加音乐、视频等。 三、将上述三个软件都复制到新的TF卡根目录下,
进入导航机设置—“导航路径设置”,指向、启动这个软件里的.EXE文件,可分别测得:导航仪的物理端口、波特率数值; 导航仪的空闲端口号; 导航仪的硬件系统情况,如:操作系统类别、CPU类型及频率、内存、屏幕分辨率等。四、依据本机系统情况,选取下载合适你机器的地图,“GPS之家”、“我爱GPS”论坛里,有很多破解的地图软件可下载。 注:新卡重新安装,应该下载完整版或懒人包。而不是地图资源。 五、将下载的地图压缩包解压缩,再其文件包复制到TF卡根目录下。 修改端口号、波特率为:COM2(假若2为你的机器端口数字) ; 4800(假如你的机器波特率为4800) 以下都以COM2 ; 4800;的数值为例,来讲解。你则依据自己实际测得的数值为准。 A、凯立德:使用其内附的修改器 具体步骤如下: 第一步打开凯立德地图文件夹; 第二步打开“NaviResFile”文件夹 看到“NaviConfig.dll”文件 打开“凯立德端口修改器”,点修改器里的“读取”,读取成功后, 修改端口成:COM2,速率:4800。再点“修改”按钮,再按“退出”按钮。 在“NaviResFile”文件夹内会生成一个叫“NaviConfig-NEW.dll”文件。 删除原“NaviConfig.dll”文件; 将“NaviConfig-NEW.dll”文件改名为:“NaviConfig.dll” “凯立德端口修改器”保留不删除。
惯性导航系统 以下是为大家整理的惯性导航系统的相关范文,本文关键词为惯性,导航,系统,,您可以从右上方搜索框检索更多相关文章,如果您觉得有用,请继续关注我们并推荐给您的好友,您可以在教育文库中查看更多范文。 目录 1.惯性导航系统的概念.........................22.惯导系统的发展历史及发展趋势 (3)
惯性导航系统的发展.......................3我国的惯性导航系统.......................5捷联惯导系统现状及发展趋势...............63.惯性导航系统的组成........................104、惯性导航系统的工作原理....................145、惯性导航系统的功能.......................186、惯性导航系统的服务模式与应用模式..........207、惯性导航系统当前的应用情况................218、惯性导航系统的特点 (23) 系统的主要优点......................23系统的主要缺点.....................249、惯性导航系统给我们的启示. (24) 1 惯性导航系统 一、惯性导航系统的概念 什么是惯性导航或惯性制导呢?惯性导航系统(Ins)是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。在给定的运动初始条件(初始地理坐标和初始速度)下,利用惯性敏感元件测量飞机相对惯性空间的线运动和角运动参数,用计算机推算出飞机的速度、位置和姿态等参数,从而引导飞机航行。 推算的方法是在运载体上安装加速度计,经过计算(一次积分和二次积分),从而求得运动轨道(载体的运动速度和距离),进而进行导航。在运载体上安装加速度计,用它来敏感、测量运载体运动的加速
高品质保驾护航,打造全新服务年。现在买导航是要求什么?首先就是价格、其次就是质量、最后就是售后。价格低、质量好、售后可靠是科技亚马逊汽车服务连锁的最高服务宗旨。为您的爱车保驾护航就选科技亚马逊。您的爱车还没有加装导航吗?那就OUT了!加装导航后,方便、快捷。导航、DVD、倒车可视、蓝牙、这些功能是车主在日常行车中,必需的功能。导航,解决了车主在陌生地点迷路的困惑;DVD,解决了车主在寂寞时无聊的难题;倒车可视,解决了车主对车后盲区不见的恐惧;蓝牙,解决了车主在行车中接电话时手忙脚乱的担忧; 原车带屏幕车型加装导航,在如今的社会已经不在稀奇,原车屏幕加装导航安装原理为高档车当中原车带一个屏幕,加装一个韩国解码器与导航盒,用原车的屏幕来显示。原车屏幕升级语音导航系统品牌在市面上也是多样。综合考虑选择可靠的品牌,可靠的售后技术。原车屏幕升级导航安装原理,可以通俗的理解为电脑USB接口外接一套硬盘,用电脑的液晶显示器来显示为同一个原理。所以原车屏幕升级导航,涉及到的车型,就比较多了,只要原车带屏幕的车型即可安装原车屏幕升级导航。比方现在的宝马、奔驰、奥迪等原车带屏幕的德系车型。丰田红杉、FJ酷路泽、天籁、本田等日系车型。福特、别克等美系车型原车带屏幕车型即可加装。原车屏幕安装导航,所有插口直接对插,加装完语音导航之后,不影响任何外观,不影响原车任何系统。 原车屏升级导航(推荐理由): 1、非破坏性:原厂开发设计,不破坏原车线路与4S店保修保养,均为无损安装; 2、保证性:韩国/台湾核心部件,确保产品质量可靠,专业安装技术团队,保证安全可靠; 3、灵活性:行车中可以自由控制导航画面是否显示(原车导航行车中,会自动锁死,不能查看地图,副驾驶查看操作不了) 4、方便性:升级后,原车屏幕可实现触摸手写控制导航,方便操作(部分下滑屏除外) 5、高效性:地图采用SD卡存储,运行效率高,更新方便,费用更低(原厂导航一般采用光盘运营方式,效率低,更新慢,且升级费用每次800-1000元) 6、完整性:改装后保留原车系统所有娱乐功能,原车碟盒功能均能照常使用,方向盘键盘控制、行车电脑控制等功能依然存在。且从外观上看不出任何改装痕迹,保留了原车的完整性。 7、国内领先的地图软件:凯立德/道道通地图任选其一,地图均为最新版本; 8、导航内置电子狗功能:GPS导航,支持导航地址查询,语音提示,固定测速预警。 奥迪TTS原车CD主机换DVD导航一体机|奥迪TTS原车屏幕升级加装导航|奥迪TTS加装DVD导航一体机
惯性导航仪的原理 惯性导航系统(INS,Inertial Navigation System)也称作惯性参考系统,是一种不依赖于外部信息、也不向外部辐射能量(如无线电导航那样)的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。惯性导航的基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。 惯性导航系统(英语:INS )惯性导航系统是以陀螺和加速度计为敏感器件的导航参数解算系统,该系统根据陀螺的输出建立导航坐标系,根据加速度计输出解算出运载体在导航坐标系中的速度和位置。 惯性导航系统属于推算导航方式,即从一已知点的位置根据连续测得的运动体航向角和速度推算出其下一点的位置,因而可连续测出运动体的当前位置。惯性导航系统中的陀螺仪用来形成一个导航坐标系,使加速度计的测量轴稳定在该坐标系中,并给出航向和姿态角;加速度计用来测量运动体的加速度,经过对时间的一次积分得到速度,速度再经过对时间的一次积分即可得到距离。 惯性导航系统至少包括计算机及含有加速度计、陀螺仪或其他运动传感器的平台(或模块)。开始时,有外界(操作人员、GPS接收器等)给 INS 提供初始位置及速度,此后 INS 通过对运动传感器的信息进行整合计算,不断更新当前位置及速度。 INS 的优势在于给定了初始条件后,不需要外部参照就可确定当前位置、方向及速度。 通过检测系统的加速度和角速度,惯性导航系统可以检测位置变化(如向东或向西的运动),速度变化(速度大小或方向)和姿态变化(绕各个轴的旋转)。它不需要外部参考的特点使它自然地不受外界的干扰或欺骗。 陀螺在惯性参照系中用于测量系统的角速率。通过以惯性参照系中系统初始方位作为初始条件,对角速率进行积分,就可以时刻得到系统的当前方向。这可以想象成被蒙上眼睛的乘客坐在汽车中,感觉汽车左转、右转、上坡、下坡,仅根据这些信息他知道了汽车朝哪里开,但不知道汽车是快,是慢或是否汽车滑向路边。 加速度计在惯性参照系中用于测量系统的线加速度,但只能测量相对于系统运动方向的加速度(由于加速度计与系统固定并随系统转动,不知道自身的方向)。这可以想象成一个被蒙上眼睛的乘客在汽车加速时向后挤压座位,汽车刹车时身体前倾,汽车加速上坡时下压座位,汽车越过山顶下坡时从座位上弹起,仅根据这些信息,乘客知道汽车相对自身怎样加速,即向前、向后、向上、向下、向左或向右,但不知道相对地面的方向。 然而,通过跟踪系统当前角速率及相对于运动系统测量到的当前线加速度,就可以确定参照系中系统当前线加速度。以起始速度作为初始条件,应用正确的运动学方程,对惯性加速度进行积分就可得到系统惯性速率,然后以起始位置座作初始条件再次积分就可得到惯性位置。
东原香山实验小学校口风琴特色课程实施方案 一、指导思想: 为了更好地培养学生对音乐的兴趣,发展学生对音乐的多种爱好,提高学生的识谱能力,以及对音乐的感受和理解能力,香山小学音乐组提出一个“口风琴进课堂”特色课程的设立。该课的教学任务是培养和提高学生对音乐的兴趣和爱好,使学生初步掌握音乐的基本知识和基本技巧,培养和提高学生对音乐的感受能力,欣赏能力和表现音乐的能力。 通过“口风琴进课堂”的音乐教学,使学生了解我国的民族音乐,热爱祖国的音乐艺术,激发学生的爱国热情,培养学生良好的思想品德,发展学生的想象力和思维能力,培养学生的审美情趣、活泼向上、积极乐观的情绪和丰富的内心情感。 根据“口风琴进课堂”课题实验研究的需要,我在人音版音乐教材第二册内容的基础上,增加了“口风琴进课堂”的课题实验的教学内容。在音乐课教学中,指导学生掌握和运用口风琴的基本吹奏方法和技巧,培养和提高学生对音乐的理解能力,加强学生的唱歌能力、识谱能力、音乐知识的运用和学习,加强音准、节奏、视唱练耳的训练和学习,让学生在音乐课中动手动嘴吹吹弹弹、用耳用心听听辩辩、放声动情唱唱跳跳、和着音乐敲敲打打、感悟领略音乐的无穷魅力,培养学生动手实践操作能力,发展学生的个性,全面提高学生的综合素质。 参加课题实验学生从过去音乐课中单一的教唱歌曲,发展为演奏、歌唱、欣赏、创作等综合训练,从过去音乐课的只“动口”变成了既动口又动手还动脑的音乐活动,学生对于运用吹奏口风琴来学习音乐知识很感兴趣,在课堂上形成了一种“我愿学习、我爱学习”的气氛,一改过去音乐课上被动学习的形式变被动
为主动学习,从而帮助学生建立并且强化了音乐学习中内心的期待,提高了学生主动学习音乐的欲望。 二实施对象 一年级三班全体同学 三实施时间 每周四第三节课 四、实施内容与教学策略: 1、组织音乐课堂,培养正确口风琴演奏方法: 在刚开始进行口风琴教学时,学生的吹奏姿势还不够标准,吹奏方法也比较欠缺,他们有的会低头吹奏,有的会挤压喉头,有的会鼓腮,有的会坐立不直,有的会过分用力,有的会用气紧张、有的会指法混乱等。对于学生出现的这些错误如果不及时纠正,将严重影响口风琴教学的质量和学生的身心健康。作为口风琴教师的我们要随时发现问题,及时纠正,可用一些简短的话语和手势引导学生。如:让学生在吹奏之前抬头、挺胸在吹奏时手指自然放松、轻轻吹气等。告诉学生口风琴在吹气是要“轻”,要有意识地控制气息,才能吹出优美动听的旋律。严格按照正确指法要求进行演奏,杜绝随意乱穿、乱跨、同音停留的现象。 2、形成自己音乐语言,培养孩子良好的吹奏习惯: 口风琴进入小学音乐课堂,学生经常是自己一拿起乐器就开吹,完全不管老师的指令。所以为了解决学生吵闹问题,作为老师我们应该从课前准备抓起。上课前,学生将所有的口风琴放到音乐琴凳上。上课铃响后,要求所有学生端正姿势坐好,老师先用大鼓敲击几条常规的节奏练习和本节课的重点节奏训练,让学生一起模仿练习,这样,就有了一个好的开头。对新的练习曲,第一步先
汽车导航系统技术解析car navigation system GPS is a global positioning satellite 24 as a foundation, to provide all-weather around the world the three-dimensional position, three-dimensional velocity information such as a radio navigation and positioning system. GPS positioning principle is: the user to receive satellite signals, obtaining the distance, clock correction and atmospheric correction parameters between the satellite and the user from, to determine the location of the user through data processing. Now, the special function within the civil GPS positioning precision can reach 10m does GPS has long aroused the automobile profession's attention, when the United States announced the opening of a part of the GPS system in the Gulf War, the automobile industry to seize this opportunity immediately, invest in the development of automotive navigation system, positioning and orientation of automobile
精心整理 惯性导航系统基本工作原理 惯性导航系统是十分复杂的高精度机电综合系统,只有当科学技术发展到一定高度时工程上才能实现这种系统,但其基本工作原理却以经典的牛顿力学为基础。 设质量m 受弹簧的约束,悬挂弹簧的壳体固定在载体上,载体以加速度a 作水平运动,则m 处于平衡后,所受到的水平约束力F 与a 的关系满足牛顿第二定律:F a m =。测量水平约束力F ,求的a ,对a 积分一次,即得水平速度,再积分一次即得水平位移。以上所述是简单化了的理性情况。由于运载体不可能只作水平运动,当有姿态变化时,必须测得沿固定坐标系的加速度,所以加速度计必须安装在惯性平台上,平台靠陀螺维持要求的空间角位置,导航计算和对平台的控制由计算机完成。 陀螺仪组件测取沿运载体坐标系3个轴的角速度信号,并被送入导航计算机,经误差补偿计算后进行姿态矩阵计算。加速度计组件测取沿运载体坐标系3个轴的加速度信号,并被送入导航计算机,经误差补偿计算后,进行由运载体坐标系至“平台坐标系”的坐标变换计算。他们沿机体坐标系三轴安装,并且与机体固连,它们所测得的都是机体坐标系下的物理量。 参与控制和测量的陀螺和加速度计称为惯性器件,这是因为陀螺和加速度计都是相对惯性空间测量的,也就是说加速度计输出的是运载体的绝对加速度,陀螺输出的是运载体相对惯性空间的角速度或角增量。而加速度和角速度或角增量包含了运载体全部的信息,所以惯导系统仅靠系统本身的惯性器件就能获得导航用的全部信息,它既不向外辐射任何信息,也不需要任何其他系统提供外来信息,就能在全天候条件下,在全球范围内和所有介质环境里自主、隐蔽的进行三维导航,也可用于外层空间的三维导航。 惯导系统的比力方程 惯导系统根据与系统类型相应的数学方程(称之为力学编排)对惯性器件的输出作处理,从而获得导航数据。尽管各种类型的系统相应的力学编排各不相同,但他们都源自同一个方程:比力方程。比力方程描述了加速度计输出量与运载体速度之间的解析关系: 式中:eT v 为运载体的地速向量;f 为比力向量,是作用在加速度计质量块单位质量上的非引力外力,由加速度计测量;g 为重力加速度;ie ω为地球自转角速度;eT ω为惯性平台所模拟的平台 坐标系T 相对地球的旋转角速度;eT dv dt 表示在平台坐标系T 内观察到的地速向量的时间变化率。以上比力方程说明用加速度计的比力输出计算地速时,必须对比力输出中的三种有害加速度成分作补偿: (1)2ie eT v ω?,即由地球自转(牵连运动)和运载体相对地球运动(相对运动)引起的哥式加速度;
惯性导航简介 ——《导航概论》课程论文 专业:测绘工程A组姓名:师嘉奇学号:2015301610091 一.摘要与关键字 1.本文摘要:本文主要对导航工程的基本内涵,方法与原理进行简单介绍,主要介绍有关惯性导航的相关内容,并且根据在本学期《导航概论》这门课程上所学习的内容谈一谈自己对导航应用的设想以及对本课程教学的建议。 2.关键字:惯性导航,定位技术,应用与服务,发展与前景 二.导航工程基本内涵 导航定位的历史与人类自身发展的历史一样久远。人类的导航定位活动源自于其生活和生产的需要。陆地上的导航定位最早发生在人类祖先外出寻找食物或狩猎的过程中,那时,他们通常在沿途设置一些特殊的“标记”来解决回家迷路的问题。随着探索遥远地域的愿望与行动的出现,他们则通过观察和利用自然地标(如山峰、河流、树木、岩石等)以及自然天体(恒星)来解决导航定位问题这也使得他们能够翻越高山、跨越河流。谈到导航,很多人会认为这是一个在近现代才提出的词汇,但是,导航的历史已经非常久远了。从古代黄帝作战使用的指南车,到战国时期的司南,从近代航海使用的指南针,再到当今社会人手一部的智能手机,导航已经有了很悠久的历史。那么,导航工程的基本内涵到底是什么呢?
首先,我们可以通过两个英文的句子来大概了解一下到底什么是导航“when am I?”和“How and when to get there?”,这两个问题问的是我现在在哪?我要怎么到那里去?它们也指出了导航的内涵,那就是在哪,怎样去,多久到达。因此,通过科学的定义,将航行载体从起始点引导到目的地的过程称为导航,导航系统给出的基本参数是载体在空间的即时位置、速度和姿态、航向等,导航参数的确定由导航仪或导航系统完成。通过这种技术引导载体方向的过程即为导航。导航是解决人,事件,目标相互位置动态关系随时间变化的科学,技术,工程问题。 在室外或者自然环境中的导航,按照载体运动的范围,可分为海陆空天(海洋、陆地、空中、空间)导航四类;按照所采用的技术,常用的导航方法有,天文导航、惯性导航、陆基无线电导航、卫星导航、特征匹配辅助导航(如地形匹配、地磁匹配、重力匹配)等,以及上述导航方法之间的不同组合(组合导航)。室内定位导航作为当今导航技术发展的个重要分支,它借鉴室外导航的相关技术,同时结合现代通信技术、网络技术传感器技术以及计算机技术的最新发展,已经成为一个重要的研究热点并在人们日常工作和生活中逐步得到应用。室内导航与自然环境中的导航既有联系又有其自身的特点,其主要差异是来自于应用环境及所采用的技术方法不同。 导航系统有两种工作状态:指示状态和自动导航状态。如导航设备提供的导航信息仅供驾驶员操纵和引导载体用,则导航系统工作为指示状态,在指示状态下,导航系统不直接对载体进行控制,如果导