
信号发生器课程设计报告
课题:设计制作一个信号发生器:
设计内容及要求:
1?产生三种波形:方波,三角波,正弦波
2?频率范围:0 ~ 100kHz
3?输出内阻不大于50 Q
4?负载50 Q时输出电压不小于5V
主要测量内容:输出信号频率范围,输出电阻,输出功率
一、系统组成:
1.1方波一三角波系统电路,由同向滞回比较器和积分电路两部分组成
图1.1方波一三角波系统电路
1.2三角波一正弦波电路,由滤波电路组成
图1.2正弦波系统电路
二、设计原理图阶段
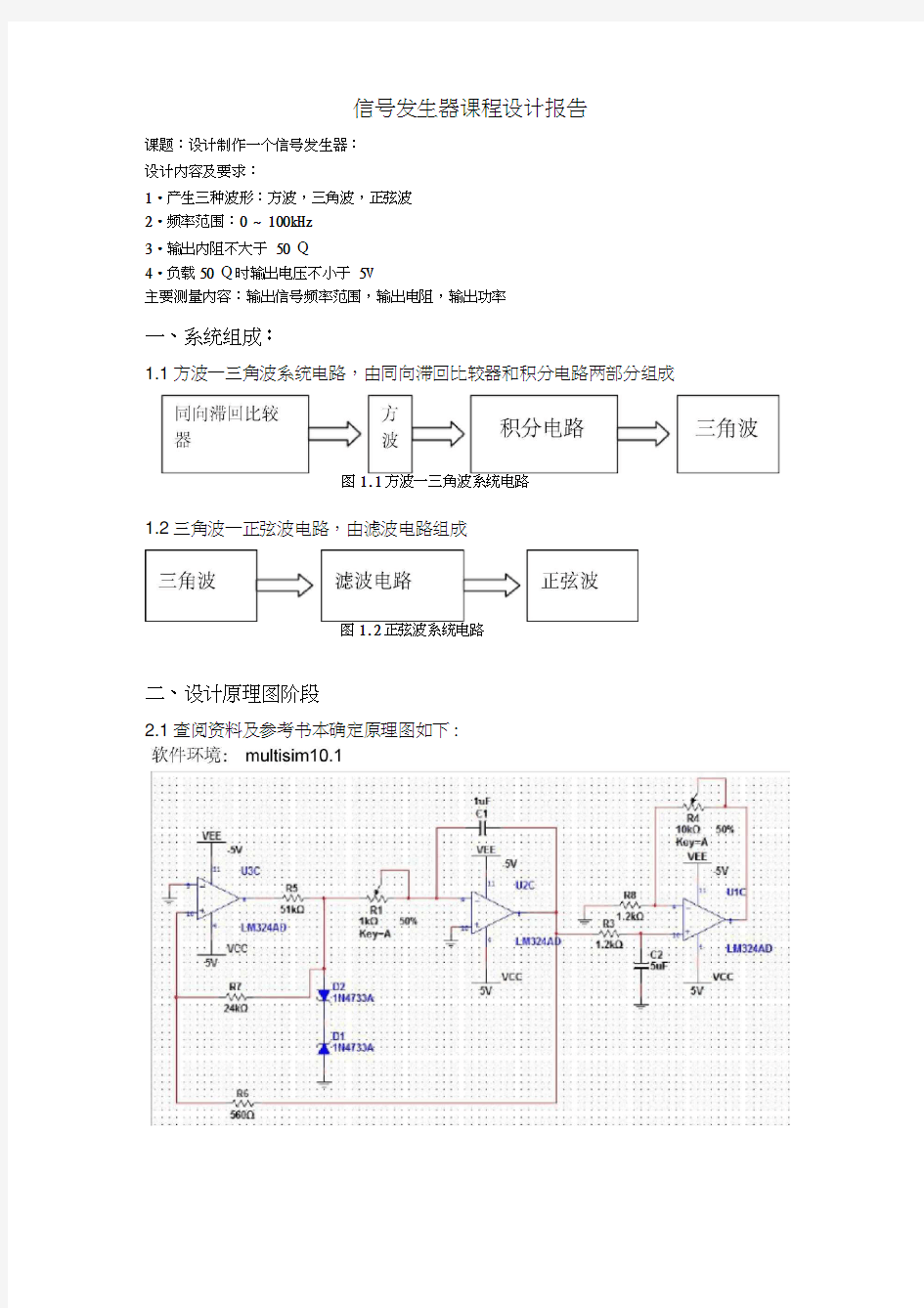
2.1查阅资料及参考书本确定原理图如下:
22原理图概况
本文所设计的电路是通过集成运算放大器LM324和基本元件组合产生不同波形(方波,三
角波,正弦波):先通过同向滞回比较电路产生方波,方波又通过积分电路产生三角波,最后滤波电路又将三角波转换成正弦波。
频率变换:本电路可以通过调节电位器R1的有效阻值改变振荡周期T,频率f=1/T.
三、电路具体设计方案及仿真
3.1.1方波一三角波转换电路图3.1所示
1uF
C1
图3.1方波一三角波发生电路
3.1.2电路分析:
该电路的方波发生部分由同向滞回比较器组成,积分运算电路既作为电压比较器的延迟环
节,又作为反馈网络。通过反馈网络,滞回比较器的输出电压U o=± Uz,阈值电压土Ur=± [R1/(R1+R2)]Uz .假设滞回比较器输出电压U01在t o时刻由-Uz跃变到+Uz此时积分电路进行反向积分,输出电压u o呈线性下降,当U o下降到滞回比较器的阈值电压-U r时,即11时刻,滞回比较器的电压由U01从+Uz跃变到-Uz,此后积分电路正向积分,u0呈线性上升。当U0上升到滞回比较器的阈值电压+UT时,即t2时刻,U01从-Uz跃变到+U乙
即返回设定初始状态,周而复始,产生振荡。
3.1.3元件参数设计
设计中应用到的稳压管稳压值为5V,即方波的幅值为 5.7V,三角波的输出电压为
1
Uo Uz(t2 t1)
R1C1
可令电容C1为0.1uF, R1设计最终要求振荡频率需在Uo(t1)
为1k Q的电位器
0 ~ 100kHz的范围内,则
1 4R1R6C1
T ---------------
R7
可令R6=560 Q R7=24k Q 满足条件。
3.1.4仿真数据
方波信号:幅值稳定在5.7V左右,波形轮廓清晰。
三角波信号
322原理分析
将三角波展开为傅里叶级数可知,它含有基波和
3次5次等奇次谐波,因此通过低通滤波
器去除基波,滤除高次谐波,可将三角波转换成正弦波。 化很小的场合。电路框图如下左图所示。输入电压和输出电压的波形如下右图所示, 频率等于UI 基波的频率。
这种方法适用于固定频率或频率变
U0的
正弦波发生电路
四、焊接与调试
4.1元件清单:
— 低通滤波电路
(a)
将三角波按傅里叶级数展开
Ul(wt)=8/
(n * n) Um(sin wt-1/9sin 3wt+1/25sin 5wt- …)
其中Um 是三角波的幅值。
3.2.3元件参数设计
通过仿真,为较大范围内调节正弦波的输出电压幅值, 串联10k Q 的电位器,而 R3, R8均为1.2k Q .
3.2.4仿真数据
正弦波信号
在集成运放输出端与反相输入端之间
附LM324芯片管脚图:
14 13 12 11 10 3 0
I Jz I i I E!'
1 2 3 4 5 K 7
4.2先在万用板上按照总电路图布局,然后进行焊接,注意到因为实验所用的三块集成运放
均在一块芯片上,所以元器件之间排布可能会比较密集,一定要事先有大致的规划,以免器件之间交叉或错位。焊接完成后,再次仔细检查电路,确保没有错误后,接上电源,查看输出波形并调节频率。
五、课题总结与心得
通过这次课程设计,重新复习了模电,深入了解了集成运放方面的知识,甚至把原来不懂的地方搞懂了,此外还学会了如何设计电路,熟练了电路焊接方法以及掌握调试方法与测试参数,同时还提高了我们的动手能力和测试技术能力。
在设计过程中难免遇到一些困难,比如万用板上的铜片掉了,我们必须借用一根铜线引渡到其他地方焊接;因为一个芯片四周要布满电阻和电容,有好几个引脚要接地,我们就用导线跳接到每个端口;有时有的元件的参数稍有偏差,导致许多参数达不到要求,我们必须根据仿真效果重新确定元件合适参数。一个偌大的工程却要保证每一步的工作都要近乎完美,因为你完全不知道最后的结果与理论的差距会在哪里产生,我们必须把误差降到最低,以保证后续工作顺利进行,节省改错时间。
经过一个半星期的努力终于顺利完成这次课程设计,虽然最终测试的结果与仿真结果有出入,
虽然一个信号发生器做了两次才完成,但经过这次课程设计我们团队收获了不少,不仅加深了对课本知识的理解,还培养了同学之间的合作能力。成功的关键是在调试时应仔细观察若出现问题必须耐心查找原因。比如在测试第一个信号发生器时,没有波形输出,双向稳压管两端电压一直保持在
+5.7V 左右,也就是说积分电路输出端并没有将负电压反馈到电压比较器的同相输入端,于是我们又检查电容两端电压,发现一直是正值,由此我们推测电路并没有产生自激振荡,不得不再次修改数据参照仿真结果确定实际元件参数值。
全国大学生 第一届机械创新设计大赛获奖作品展示 全国一等奖 北京化工齿动多功能平行 口钳北京化工齿动多功能平行 口钳 北京化工齿动多功能平 行口钳 大连理工机械式自动 节水水龙头 第二炮兵工程学院军地两用全自动担架车第二炮兵工程学院军地两 用全自动担架车 东南大学自适应可翻转 探测车 东南大学自适应可翻 转探测车 东南大学自适应可翻转探 测车东南大学自适应可翻转探 测车 福大节流阀型高楼逃生 器 福大节流阀型高楼逃 生器 福大节流阀型高楼逃生器国防科大行星轮式登月车 国防科大行星轮式登月 车国防科大行星轮式登 月车 国防科大行星轮式登月车 哈工并联与分布控制机器 人哈工并联与分布控制机 器人 哈工并联与分布控制 机器人 哈工并联与分布控制机器 人哈工并联与分布控制机器 人 哈工并联与分布控制机 器人 哈工并联与分布控制 机器人 哈工并联与分布控制机器 人 哈工程仿生机器蟹哈工程仿生机器蟹哈工程仿生机器蟹 哈工程仿生机器蟹哈工大微定位仿生机器人 哈工大微定位仿生机器 人海军工程大学摆式特 种发动机
天津大学爬杆喷漆机器人天津大学爬杆喷漆机器人 中国农大菌液自动抽取 喷涂机中国农大菌液自动抽 取喷涂机 重庆大学半球体螺旋沟槽 数控研磨机 重庆大学半球体螺旋沟槽 数控研磨机重庆大学半球体螺旋沟槽数控研磨机 全国二等奖 北工大助力器北工大助力器北工大助力器长春理工轮足式机器人 长春理工轮足式机 器人 长春理工轮足式机器人长春理工轮足式机器人大连理工蚯蚓爬行器 大连理工蚯蚓爬行 器东北大学圆柱凸轮数控 铣削加工装置 哈工程螺旋传动管道机器人海军工程大学舰船探测者 海军工程大学舰船 探测者华东理工易拉罐有偿回 收装置 /华南理工健身洗衣机华南农大气动式龙眼去核机 华南农大气动式龙眼去核机南昌大学脉动式无极变 速器 上海交大可折叠崎岖表面自 适应障碍小车 上海交大可折叠崎岖表面自 适应障碍小车 西安电子科大新型球形机器人西安思源学院纱线卷绕 防叠机 西北工业大学方形区域喷灌 龙头 西南交大液压式无极变速器 西南科大环卫保洁西南科大环卫保洁清扫浙大虫虫小强浙大虫虫小强
自动搬运机器人 王泽栋1 曹嘉隆1 高召晗1 杨超2 (1.电子信息工程系学生,2.电子信息工程系教师) 【摘要】 本设计与实作是利用反射式红外线传感器所检测到我们所要跑的路线,我们以前后车头共4颗红外感应传感器TCRT5000来检测黑色路线,并利用Atmel 公司生产的8位单片机AT89S52单片机做决策分析。,将控制结果输出至直流电机让车体自行按预先设计好的路线行走。以AT89S52晶片控制自动搬运机器人的行径,藉由自动搬运的制作过程学习如何透过程式化控制流程、方法与策略、利用汇编语言控制电机停止及正反转,使自动搬运机器人能够沿轨道自行前进、后退以及转弯。目的是在于让车子达到最佳效能之后,参加比赛为最终目的。自动搬运机器人运行过程中会遇到直线、弯道、停止。该设计集检测,微控等技术为一体,运用了数电、模电和小系统设计技术。该设计具有一定的可移植性,能应用于一些高难度作业环境中。 【关键词】自动搬运;黑线检测;时间显示。 1.系统方案选择和论证 1.1 系统基本方案 根据要求,此设计主要分为控制部分和检测部分,还添加了一些电路作为系统的扩展功能,有电动车每一次往返的时间(记录显示装置需安装在机器人上)和总的行驶时间的显示。系统中控制部分包括控制器模块、显示模块及电动机驱动模块。信号检测部分包括黑线检测模块。系统方框图如图1.1.1 图1.1 系统方框图 1.2各模块方案的比较与论证 (1)控制器模块 根据设计要求,控制器主要用于信号的接收和辨认控制电机的正反转、小车的到达直角转弯处的转向、时间显示。 方案一:采用MCS-51系列单片机价格低、体积小、控制能力强。 方案二:采用与51系列单片机兼容的Atmel公司的AT89S52作为控制器件
2017年全国大学生电子设计竞赛简易水情检测系统(P题) 2017年8月12日
摘要 本设计的是简易水情检测系统以STC89C52芯片为核心,辅以相关的外围电路,设计了以单片机为核心的水情检测系统。系统主要由5V电源供电。在硬件电路上在,用总线连接PH值传感器和水位传感器,通过传感器收集到的水情数据发送到单片机,单片机存储实时数据,并显示在12864LCD液晶屏上。在软件方面,采用C语言编程。通过对单片机程序设计实现对水情检测系统的水情数据的采集、显示和检测。 关键词:单片机最小系统;PH值传感器;水位传感器;AD模块 Abstract The design is a simple water regime detection system to STC89C52 chip as the core, supplemented by the relevant external circuit, designed to single-chip as the core of the water regime detection system. The system is powered by 5V power supply. In the hardware circuit, with the bus connection PH sensor and water level sensor, through the sensor to collect the water data sent to the microcontroller, single-chip storage of real-time data, and displayed on the 12864LCD LCD screen. In software, the use of C language programming. Through the single-chip program design to achieve the water regime detection system of water data collection, display and detection. Key words:single chip minimum system; PH value sensor; water level sensor; capacitance
2013年全国大学生电子设计竞赛 简易旋转倒立摆及控制装置(C题) 【本科组】 摘要: 通过对该测控系统结构和特点的分析,结合现代控制技术设计理念实现了以微控制器MC9S12XS128系列单片机为核心的旋转倒立摆控制系统。通过采集的角度值与平衡位置进行比较,使用PD算法,从而达到控制电机的目的。其工作过程为:角位移传感器WDS35D通过对摆杆摆动过程中的信号采集然后经过A/D 采样后反馈给主控制器。控制器根据角度传感器反馈信号进行PID数据处理,从而对电机的转动做出调整,进行可靠的闭环控制,使用按键调节P、D的值,同时由显示模块显示当前的P、D值。 关键字: 倒立摆、直流电机、MC9S12XS128单片机、角位移传感器WDS35D、PD算法
目录 一、设计任务与要求 (3) 1 设计任务 (3) 2 设计要求 (3) 二系统方案 (4) 1 系统结构 (4) 2 方案比较与选择 (4) (1)角度传感器方案比较与选择 (4) (2)驱动器方案比较与选择 (5) 三理论分析与计算 (5) 1 电机的选型 (5) 2 摆杆状态检测 (5) 3 驱动与控制算法 (5) 四电路与程序设计 (6) 1 电路设计 (6) (1)最小系统模块电路 (6) (2)5110显示模块电路设计 (7) (3)电机驱动模块电路设计 (8) (4)角位移传感器模块电路设计 (8) (5)电源稳压模块设计 (8) 2 程序结构与设计 (9) 五系统测试与误差分析 (10) 5.1 测试方案 (10) 5.2 测试使用仪器 (10) 5.3 测试结果与误差分析 (10) 6 结论 (11) 参考文献 (11) 附录1 程序清单(部分) (12) 附录2 主板电路图 (15) 附录3 主要元器件清单 (16)
全国大学生第一届机械创新设计大赛获奖作品 展示 全国一等奖 北京化工齿动多功能平行 口钳北京化工齿动多功能平行 口钳 北京化工齿动多功能平行 口钳 大 连理工机械式自动节水 水龙头 第二炮兵工程学院军地两用全自动担架车 第二炮兵工 程学院军地两用全自动担 架车 东 南大学自适应可翻转探测 车 东 南大学自适应可翻转探 测车 东南大学自适应可翻转探测 车 东 南大学自适应可翻转探测 车 福 大节流阀型高楼逃生器 福大节流阀 型高楼逃生器 福大节流阀型高楼逃生器 国 防科大行星轮式登月车 国 防科大行星轮式登月车 国 防科大行星轮式登月车
国防科大行星轮式登月车 哈工并联与 分布控制机器人 哈 工并联与分布控制机器人 哈 工并联与分布控制机器 人 哈工并联与分布控制机器人 哈 工并联与分布控制机器人 哈 工并联与分布控制机器人 哈 工并联与分布控制机器 人 哈工并联与分布控制机器人 哈 工程仿生机器蟹 哈 工程仿生机器蟹 哈 工程仿生机器蟹 哈工程仿生机器蟹 哈 工大微定位仿生机器人 哈 工大微定位仿生机器人 海 军工程大学摆式特种发 动机 天津大学爬杆喷漆机器人 天 津大学爬杆喷漆机器人 中 国农大菌液自动抽取喷涂 机 中国农大菌 液自动抽取喷涂机
重庆大学半球体螺旋沟槽数 控研磨机 重 庆大学半球体螺旋沟槽数 控研磨机 重 庆大学半球体螺旋沟槽数 控研磨机 全国二等奖 北工大助力器 北工大助力 器 北工大助力 器 长 春理工轮足式机器人 长春理工轮足式机器人 长 春理工轮足式机器人 长 春理工轮足式机器人 大 连理工蚯蚓爬行器 大连理工蚯蚓爬行器 东 北大学圆柱凸轮数控铣 削加工装置 哈工程螺旋 传动管道机器人 海 军工程大学舰船探测者 海军工程大学舰船探测 华 东理工易拉罐有偿回收 / 华南理工健身洗衣机 华 南农大气动式龙眼去核机
2015 年全国大学生电子设计竞赛 全国一等奖作品 设计报告部分错误未修正,软 件部分未添加 竞赛选题:数字频率计(F 题)
摘要 本设计选用FPGA 作为数据处理与系统控制的核心,制作了一款超高精度的数字频率计,其优点在于采用了自动增益控制电路(AGC)和等精度测量法,全部电路使用PCB 制版,进一步减小误差。 AGC 电路可将不同频率、不同幅度的待测信号,放大至基本相同的幅度,且高于后级滞回比较器的窗口电压,有效解决了待测信号输入电压变化大、频率范围广的问题。频率等参数的测量采用闸门时间为1s 的等精度测量法。闸门时间与待测信号同步,避免了对被测信号计数所产生±1 个字的误差,有效提高了系统精度。 经过实测,本设计达到了赛题基本部分和发挥部分的全部指标,并在部分指标上远超赛题发挥部分要求。 关键词:FPGA 自动增益控制等精度测量法
目录
1. 系统方案 1.1. 方案比较与选择 宽带通道放大器 方案一:OPA690 固定增益直接放大。由于待测信号频率范围广,电压范围大,所以选用宽带运算放大器OPA690,5V 双电源供电,对所有待测信号进行较大倍数的固定增益。对于输入的正弦波信号,经过OPA690 的固定增益,小信号得到放大,大信号削顶失真,所以均可达到后级滞回比较器电路的窗口电压。 方案二:基于VCA810 的自动增益控制(AGC)。AGC 电路实时调整高带宽压控运算放大器VCA810 的增益控制电压,通过负反馈使得放大后的信号幅度基本保持恒定。 尽管方案一中的OPA690 是高速放大器,但是单级增益仅能满足本题基本部分的要求,而在放大高频段的小信号时,增益带宽积的限制使得该方案无法达到发挥部分在频率和幅度上的要求。 方案二中采用VCA810 与OPA690 级联放大,并通过外围负反馈电路实现自动增益控制。该方案不仅能够实现稳定可调的输出电压,而且可以解决高频小信号单级放大时的带宽问题。因此,采用基于VCA810 的自动增益控制方案。 正弦波整形电路 方案一:采用分立器件搭建整形电路。由于分立器件电路存在着结构复杂、设计难度大等诸多缺点,因此不采用该方案。 方案二:采用集成比较器运放。常用的电压比较器运放LM339 的响应时间为1300ns,远远无法达到发挥部分100MHz 的频率要求。因此,采用响应时间为4.5ns 的高速比较器运放TLV3501。 主控电路 方案一:采用诸如MSP430、STM32 等传统单片机作为主控芯片。单片机在现实中与FPGA 连接,建立并口通信,完成命令与数据的传输。 方案二:在FPGA 内部利用逻辑单元搭建片内单片机Avalon,在片内将单片机和测量参数的数字电路系统连接,不连接外部接线。 在硬件电路上,用FPGA 片内单片机,除了输入和输出显示等少数电路外,其它大部分电路都可以集成在一片FPGA 芯片中,大大降低了电路的复杂程度、减小了体积、电路工作也更加可靠和稳定,速度也大为提高。且在数据传输上方便、简单,因此主控电路的选择采用方案二。
2015 年全国大学生电子设计竞赛 全国一等奖作品
设计报告 部分错误未修正,软 件部分未添加
竞赛选题:数字频率计(F 题)
1 / 10
摘要
本设计选用 FPGA 作为数据处理与系统控制的核心,制作了一款超高精度 的数字频率计,其优点在于采用了自动增益控制电路(AGC)和等精度测量法, 全部电路使用 PCB 制版,进一步减小误差。
AGC 电路可将不同频率、不同幅度的待测信号,放大至基本相同的幅度, 且高于后级滞回比较器的窗口电压,有效解决了待测信号输入电压变化大、频率 范围广的问题。频率等参数的测量采用闸门时间为 1s 的等精度测量法。闸门时 间与待测信号同步,避免了对被测信号计数所产生±1 个字的误差,有效提高了 系统精度。
经过实测,本设计达到了赛题基本部分和发挥部分的全部指标,并在部分指 标上远超赛题发挥部分要求。
关键词:FPGA 自动增益控制 等精度测量法
1 / 10
目录
摘 要....................................................................................................................1 目录........................................................................................................................ 2 1. 系统方案...................................................................................................3
1.1. 方案比较与选择................................................................................3 1.1.1. 宽带通道放大器.........................................................................3 1.1.2. 正弦波整形电路.........................................................................3 1.1.3. 主控电路.....................................................................................3 1.1.4. 参数测量方案.............................................................................4
1.2. 方案描述............................................................................................4 2. 电路设计...................................................................................................4
2.1. 宽带通道放大器分析........................................................................4 2.2. 正弦波整形电路................................................................................5 3. 软件设计...................................................................................................6 4. 测试方案与测试结果...............................................................................6 4.1. 测试仪器............................................................................................6 4.2. 测试方案及数据................................................................................7
4.2.1. 频率测试.....................................................................................7 4.2.2. 时间间隔测量.............................................................................7 4.2.3. 占空比测量.................................................................................8 4.3. 测试结论............................................................................................9 参考文献................................................................................................................ 9
2 / 10
1助立椅 参赛学校: 华南理工大学 参赛者: 毕经元、xx、万明远,指导教师: xx、xx仪 作品内容简介本作品是一张方便老年人或者腿脚不便的人站立的椅子。主要是通过使用者上肢的运动来带动一面的动作,从而可以调整人的坐姿与重心,来减少下肢的运动来实现站立姿势。本机构主要用到了平面连杆以及其它一些机械结构来实现椅面的调整,来带动使用者的行动。并且如果使用者需要的话,在坐下来的时候也可以起到减少其下肢运动的作用。 主要创新点我们主要是考虑到老年人或者其他腿脚不方便的人群,在站起来的时候总是很费力;而且往往在坐下来的过程中也是一屁股就坐了下去。为了改变这样的状况,我们将人站立过程中的手脚并用,该为手起到主要作用,方便特殊人群。 推广应用价值我们的社会对老年人的关爱渐见凸现,在这样的背景下,对老年人日常行动的关爱也就更为重要了。而且对于特殊群体,比如下肢受伤,残疾等等的人群,我们的设计也可以助他们一臂之力。方便了使用者日常行动,而且也减轻了子女或者看管人的看护负担。 这样的话,他们坐下就不愁再站起来了。 2自动搀扶助步车 参赛学校: 青岛大学 参赛者:
王新刚、曹志强、郑虎阶、徐晟、孙海峰,指导教师: 师忠秀、庞严英作品内容简介本产品主要应用于腿部残疾、腿部骨折处于恢复期的病人。主要运用了自动检测和电器控制的原理;巧妙地将助步车和动力装置结合起来,实现了动力助步;并添加了单片机系统、光电检测装置以及继电器,可以自动检测病人的行动意图,并且实现了车随人动。该车充分考虑了不同使用者的需要,设置了多种不同的工作模式;另外,本车增添了多处人性化设计及安全保护措施,结构简单、操作方便、产品的可靠性高;创新地利用支撑板代替双拐,这样可以减轻病人长时间拄拐带来的劳累;由于该车操作的方便性以及车身对人体的搀扶作用,病人可以独立使用,从而大大减轻家人及护士的负担。基本技术指标: 1、"整车指标: 速度0~ 0."5m/s连续可调;电机: DC12V、46rpm、P=15W。电源:12V、14Ah;光电开关: 检测距离: 0."1m/ 0."3m、DC 6~36V。 主要创新点 (1)系统能够自动检测人体的行动意图并自动启动相关系统进行动力助步; (2)本车实现了车随人动,提高了使用者的方便性和舒适性; (3)本车实现了在一定范围内的无级变速; (4)本车采用了多种工作模式以适应不同的使用人群; (5)独特的控制电路大大简化了控制系统;
电子设计制作大赛报告设计课题:交通灯设计 专业班级:通信0913班 学生:文峰 巍巍 河昌 设计时间:2011.5.20~2011.6.5 电子设计制作竞赛报告
设计课题:交通灯设计 专业班级:通信0913班 学生:文峰巍巍河昌 设计时间:2011.5.20~2011.6.5 一、设计任务及实现要求: 1、使用LED灯模拟交通灯的工作过程,红、黄、绿三种颜色的LED灯分别模拟交 通灯的红灯、黄灯、绿灯。 2、实现如下要求的从状态一到状态四的循环,并通过数码管来显示倒计时的时间。 状态一:黄、绿灯熄灭,红灯亮5s,然后进入状态二; 状态二:红、绿灯熄灭,黄灯闪烁5s,然后进入状态三; 状态三:红、黄灯熄灭,绿灯亮5s,然后进入状态四; 状态四:红、绿灯熄灭,黄灯闪烁5s,然后回到状态一。 3、每个状态数码管都要显示倒计时的时间。 4、扩展:不同延时时间 二、设计原理(设计原理图,原理分析): 1、总原理图 2、PCB图:
3、原理分析: 采用74194的左移位功能,共输出4种状态,分别是0001;0010;0100; 1000;其中的0010与1000两状态实现黄灯亮,0001实现红灯亮,0100实现绿灯 亮;通过门电路反馈实现74194移位的功能。555芯片的作用是提供一个时钟给 74192,利用74192的功能实现减计数,与数码管相连,预置初始值为5,实现倒 计时5秒的功能。再利用借位端的跳变给74194一个时钟,即5秒实现一跳变, 以达到要求亮灯的时长。对于黄灯的闪烁,只要加门电路,实现每隔1s闪烁一次。 同时外加一个门电路和开关控制74192,实现拓展时间的要求。 三、各部分电路的功能: 1、555定时电路: 555电路工作原理:如图接线, R1用0.1k的电阻, R2用7.5k的电阻,C用100uf的电容,3脚为输出 端。产生的振荡周期T=0.7(R1+2R2)C。即T≈0.7* (0.1K+2*7.5K)*100u≈1.1s。将振荡周期从三端 输出,作为时钟。
第三届全国大学生机械创新设计大赛决赛 参赛作品设计说明书格式要求说明 1.总体要求 全文控制在8~15页以内,并按以下顺序编排:作品名+“设计说明书”、设计者、指导教师、学校名+院系名+学校所在城市+邮编、摘要、关键词、正文[可自行组织,但应包括下列内容:作品背景(国内外相关研究现状)、设计制作中解决的关键技术问题的描述、作品实物或实物模型的照片、创新特色、预计应用前景等]、参考文献。可不加封面。采用word 2003版本编排。 2.页面要求 A4页面。页边距:上25mm,下25mm,左、右各20mm。标准字间距,单倍行间距。不要设置页眉,页码位于页面底部居中。 3.图表要求 插图按序编号,并加图名(位于图下方),采用嵌入型版式。图中文字用小五号宋体,符号用小五号Times New Roman(矢量、矩阵用黑斜体);坐标图的横纵坐标应标注对应量的名称和符号/单位。 表格按序编号,并加表题(位于表上方)。采用三线表,必要时可加辅助线。4.字号、字体要求 油罐车注油自动控制系统设计说明书[r1] 设计者:×××,×××,×××,×××,×××[r2] 指导教师:×××,×××[r3] (XX大学机电学院,西安710056)[r4] (空一行) [url=]作品内容简介[/url][I5] 通过实验设计了一套自动加油系统……(400—600字以内)。联系人、联系电话、
EMAIL (空一行) 1 研制背景及意义 在新疆塔里木石油基地,目前从油井打出的原油储存到储油罐后,从储油罐向油罐车注油时,一个人需站在油罐车上注油口旁观察油罐是否加满,而另一个人关闭阀门。因在原油内含有大量的有毒气体(硫化氢),从安全角度考虑站在油罐车上的人必须戴上防毒面具…… 2设计方案[r6] 2.1 电磁控制 用电磁控制比较容易实现,但是因为防火、防暴的原因,加油区不得用电,无法用电磁控制………… 2.2 气动控制 用气动控制,气源的空气压缩机也要用电,但可以将空气压缩机放置在远离加油区的位置。我们最终选择了这一方案。如图1所示,…… 气动方案设计时考虑的主要问题: …… 正文中表示物理量的符号,表示点、线、面的字母均用Times New Roman斜体; 表示法定计量单位、词头的符号、函数等,化学元素符号均用Times New Roman正体。 3 理论设计计算 …… 4 工作原理及性能分析 …… 完成制作后,作品实物外形照片见图9。 5 创新点及应用
2017年全国大学生电子设计竞赛 管道内钢珠运动测量装置(M题) 【高职高专】
摘要: 系统以STC15W4K61S4单片机为主控器,设计一款管道内钢珠运动测量装置。该装置可以获取管道内钢珠滚动的方向,以及倒入管道内钢珠的个数和管道的倾斜角度。并通过LCD12864液晶显示屏实时显示钢珠滚动方向、个数以及管道的倾斜角度。系统包括单片机主控模块、角度信号采集模块、磁力传感器模块、显
示模块、电源模块、采用稳压输出电源为系统提供工作电源。系统制作成本较低、工作性能稳定,能很好达到设计要求。 关键词:角度传感器、磁性接近开关、LCD12864 目录 1设计任务与要求 (1) 1.1设计任务 (1) 1.2技术指标 (1) 1.3题目评析 (1)
2方案比较与选择 (2) 2.1单片机选择 (2) 2.2角度测量选择 (2) 2.3 钢珠运动检测选择 (2) 2.4显示选择 (2) 2.5电源选择 (2) 3电路系统与程序结构设计 (3) 3.1系统硬件总体设计 (3) 3.2单片机最小系统模块设计 (3) 3.3角度传感器模块设计 (3) 3.4 磁性传感器模块设计 (4) 3.5显示模块设计 (4) 3.6电源模块设计 (4) 3.7程序结构与设计 (5) 4系统测试 (5) 5总结 (6) 参考文献及附录 (6)
1设计任务与要求 1.1设计任务 设计并制作一个管道内钢珠运动测量装置,钢珠运动部分的结构如图1.1所示。 1.2技术指标 1.基本要求 规定传感器宽度 w≤20mm,传感器1和2之间的距离l 任意选择。 (1)按照图1.1所示放置管道,由A 端放入2~10粒钢珠,每粒钢珠放入的时 间间隔≤2s,要求装置能够显示放入钢珠的个数。 (2)分别将管道放置为A 端高于B 端或B 端高于A 端,从高端放入1粒钢 珠,要求能够显示钢珠的运动方向。 (3)按照图1.1所示放置管道,倾斜角ɑ为10o~80o之间的某一角度,由A 端放入1粒钢珠,要求装置能够显示倾斜角ɑ的角度值,测量误差的绝对≤3o。 2.发挥部分 设定传感器1和2之间的距离l 为20mm ,传感器1和2在管道外表面上安放的位置不限。 (1)将1粒钢珠放入管道内,堵住两端的管口,摆动管道,摆动周期≤1s , 摆动方式如图1.2所示,要求能够显示管道摆动的周期个数。 (2)按照图1.1所示放置管道,由A 端一次连续倒入2~10粒钢珠,要求装置 能够显示倒入钢珠的个数。 (4)其他。 3.设计报告。 1.3题目评析 根据设计要求,对题目评析如下: 本题的重点: ① 传感器灵敏度的选择。 ② 用于钢珠运动检测的传感器选择 图1.1:管道内钢珠运动测量装置的结构图 图1.2:管道摆动方式
机械创新设计心得(精选多篇) 有幸参加本次“博亚杯”机械创新设计大赛。不管是在准备过程中还是在比赛过程中,都学到了许多在平时的学习中所学不到和感受不到的东西。 参加比赛是对一个人各方面能力的全面锻炼。这是一个自我提升的过程。在这个过程中所得到的经验对以后的学习工作生活都很重要。总结自己团队的成败得失吸取成功团队的宝贵经验,个人觉得一个团队要取得成功以下几点非常重要: 首先需要一个优秀的领导者,在拥有必要的基本知识技能外还需要能够统筹全局,充分调动整个团队的积极性,发挥每个团队成员的长处,挖掘每个成员的潜能。这需要他能够准确把握宏观的方向也要注意很小的细节问题。 二,一个团结奋进的团队,不仅是个人能力有限,在思维的灵活、见识的广度、上个人都是无法和团队相比拟的。一个团结的团队会有不竭的动力,团员间互相鼓励保证了团队的旺盛的斗志。团员间相互交流相互理解使整个比赛过程更加协调。 三、明确的目标和坚定的信念以及不灭的斗志。坚持到最后就是胜利,说的容易但做起来却不是那么回事,很多时候在最需要坚持时,我们往往忘记了这句话。生活最怕没有目标,做一件事,参加一个比赛亦如此。没有一个明确而有
强烈的目标很难取得比赛的成功。 四、各方面的支持。来自自己的内心,来自学校,来自老师。 比赛表面上是一件件参赛作品的比较,实质是思维和思想的比拼。在比赛中能够使自己在思想认识上得到提高在思维习惯上得到改善则是最大的收获。创新,一个不曾间断过的话题,但怎么做到创新,怎么才能有一个创新型的思维却很少有人做到。 另外,在比赛过程中和其他学校学生的交流,让我认识到了自己看到了现状。从对比中看到了自己的情况,对自己在今后的学习生活上也有很大的帮助,给自己今后在一些事情上的选择上提供了借鉴。 机械创新设计心得: 大三花了将近半年的时间去搞第三届大学生机械创新设计大赛的作品,本来比赛早就完成了,开学还将所有的比赛花费的发票递交了上去,最后学校还要我们写一篇比赛心得,今晚花了两个钟的时间写下了下来这篇比赛心得,真的有点长,转发到自己的博客上,见证下自己曾经的步伐。 转眼间,大三过去了,在大三的第一个学期的最后几天,我们的参赛作品——绿色环保自动吸尘黑板擦通过了答辩,最后得到了学校老师,领导的肯定,成为其中的一个立项项目,得到了学校的大力支持。
精心整理全国电子设计大赛训练项目 设计报告 题目数控通用直流电源 摘要 一、 1.1 1.2 1.3 1.4 二、 2.1系统总框图 (7) 2.2硬件设计 (7) 2.2.1开关稳压电源模块 (7) 2.2.2单片机控制模块 (8) 2.2.3正、负输出可调稳压电源模块 (9) 2.2.4按键模块 (10) 2.3软件设计 (10) 2.3.1主程序流程 (11) 2.3.2过流保护程序流程 (11) 三、测试、结果及分析 (12)
3.1基本功能 (12) 3.2发挥功能部分 (15) 四、总结 (15) 五、参考文献 (15) 附录一、完整的系统原理图 (16) 附录二、完整的系统PCB图 (17) 0.12V, 一、 设计并制作一个直流可调稳压电源。 二、设计要求 1.基本要求 ①用变压器输出的两组17.5V交流绕组,设计三组稳压电源,其中两组3V-15V可调,另一组固定输出+5V; ②各组输出电流最大:750mA; ③各组效率大于75%,在500mA输出条件下测量,应在DC/DC输入端预留电流测量端; ④为实现程序控制,预留MCU控制接口。 2.发挥部分 ①设置过流保护,保护定值为1.2A; ②用自动扫描代替人工按键,实现输出电压变化;
③扩展输出电压种类(比如三角波、梯形波等); ④可实现双电源同步调节或分别调节。 一、方案论证与比较 通过对题目的任务、要求进行分析,我们将整个设计划分成两个部分:稳压电源部分和数控部分。 1.1稳压电源部分方案比较 方案一:三端稳压电源 根据设计要求,可以采用三端稳压器来实现输出系统所需的三种直流电压:固定+5V和两组可调输出。其中,用7805实现固定5V的输出,LM317实现可调输出(控制输出电压为1.2~37V)。 电路原理图如下: 图1固定5V输出 7805是我们最常用到的稳压芯片了,它的使用方便,用很简单的电路即可以输入一个直流稳压电源,它的输出电压为5v。 图2LM317可调电源模块 在综合考虑LM317的输出电压范围1.25~37V和其最小稳定工作电流不大于5mA的条件下保证R1≤0.83KΩ,R2≤23.74KΩ,就能保证LM317稳压块在空载时能够稳定工作。输出电压:V O =1.25(1+R2/R1),在LM317输出范围为1.25~37V的条件下,R2/R1范围为:0~28.6。 优点:线性电源工作稳定,输出纹波小,且不需做过多调整,使用较为方便,工作安全可靠,适合制作通用型、标称输出的稳压电源。缺点:线性稳压电路的内部功耗大,效率低,散热问题较难解决。 方案二:晶体管串联式直流稳压电路 晶体管串联式直流稳压电路。电路框图如图3所示,该电路中,输出电压UO经取样电路取样后得到取样电压,取样电压与基准电压进行比较得到误差电压,该误差电压对调整管的工作状态进行调整,从而使输出电压发生变化,该变化与由于供电电压UI发生变化引起的输出电压的变化正好相反,从而保证输出电压UO为恒定值(稳压值)。 图3晶体管串联式直流稳压电路方框图 方案三:开关电源 根据设计要求,可选用开关电源来完成设计。LM2596为电路设计核心。 调整管 取样 误差放大 基准电压 辅助电源 UI UO
一:方案论证 1.系统总体设计方案 根据题目要求,总体设计方案如下:将交流电220V送进隔离变压器,一级输出18V交流电。通过整流滤波,将交流电转为直流电,进行DC-DC升压和降压。副DC-DC实现的降压值为5V,用于给单片机控制系统供电。通过键盘可以对主DC-DC升压的输出电压进行设定和步进调整,并由AD对输出进行采样,通过在单片机内预置的算法对输出进行补偿调整,同时从液晶屏上数字显示出电流和电压值。当开关稳压电源输出电流达到上限时,启动过流保护;当故障排除后,开关电源恢复正常工作。系统总体框图如图1.1所示。 图1.1 系统总体框图 2.主DC-DC升压电路设计方案 DC-DC升压电路采用自举式升压方式,如图1.2所示,当晶体管导通时,电感与电源接地端直接相连,形成回路。随着能量存储到电感的磁场中,流过电感的电流斜线上升,磁力线增强。 当晶体管截止时,磁场开始消失。随着它的减弱,会切割电感的导线,产生一个电压。由于磁场的运动方向与磁场建立时的方向相反,所以感应电压反向。从而实现升压的过程。 晶体管截止时电流方向 图1.2 自举式主DC-DC回路拓扑图 3.控制方法及实现方案 对主DC-DC升压转换器的控制方法采用硬件闭环控制为主、软件补偿和测量相结合的方法对DC-DC的输出进行精确控制。硬件控制采用国家半导体公司的LM2587-ADJ开关电源控制芯片组成对输出主回路的电压闭环控制,实现对系统
的粗调。软件控制选用STC12C5412AD 单片机作为系统控制器,系统的显示、按 键、A/D 、D/A 全部集中在核心控制板上,通过预置算法实现对系统的精调。 4.提高效率的方法及实现方案 1.降低二极管的损耗:二极管一般需要0.7V 的导通电压降。在输出电压为 21.6V 时,二极管要消耗一定的输出功率。而肖特基二极管的导通压降一般为 0.2V ~0.3V ,因此使用这类二极管这能够有效降低其上的功率损耗。 2.降低开关管的损耗:如果将开关管设计在外围电路中,极易由于设计参数 的问题导致开关管部分时间工作在线性区,会引起一定损耗。在设计中,选用 LM2587,它将开关管集成到芯片内部,参数由厂家整定,可以大大减少功耗。 3.减少铜损:铜损是由导线的寄生电阻和电感线圈引起的。实际设计中,选 用横截面积大的铜丝,并采取多股缠绕的方法,减少单位横截面积电阻。 4.减少铁损:引起铁损的原因有两个——磁滞损耗和涡流损耗。在实际操作 中,采用EI 型电感磁芯,并在连接处留有一定空隙。由于存在空气间隙,使之 不易产生磁滞和涡流。 二:电路设计与参数计算 1.主回路器件的选择及参数计算 题目中要求:18V 交流输入时,经转换后输入电压为21.6V (理论计算得出), 负载端电压为30V~36V 。最大输出电流I omax 为2A ,主DC-DC 升压变换器效率 η≥70%(发挥部分要求达到η≥85%)。据此,在主DC-DC 升压回路中主要用来 实现DC-DC 变换器的器件为LM2587-ADJ 。LM2587-ADJ 内部有一个100kHz 的振荡器,内部开关电流额定值5A ,负载电压V load <65V ,输入电压需保持在 4V~40V ,变换器效率90%,理论上完全满足设计需求。 主DC-DC 回路电路图如图2.1所示,通过改变R 2和R 3的比值即可设定所需 负载电压值。 图2.1 主回路原理图 将反馈电压与内部参考电压1.23V 进行比较: V load =1.23V(1+32R R ) (2-1)
第五届江苏省大学生机械创新设计大赛获奖名单(学校、奖项汇总)参赛学校作品名称完成学生指导教师一等奖二等奖三等奖总计 常熟理工学院 1 2 3 多功能生态讲台刘苏河、浦明龙、陈兵、 陆佳顺、陈金燕 刘军军、易风11 长冲程节能抽油机贺笑磊、潘景乐、时鸣杰、 陈锦、王永吉 牛曙光、窦岩 1 1 智能化产品展示系统蒋文强、吴佳伟、于光明、 唐亚洲、凌安琪 刘忠、孟涛 1 1 常州大学112 三板书面避粉笔尘自动擦的黑板韩汪洋、邓新、陈秋燕、 高朱炳、王建懿 胡爱萍、刘善淑11 首脑教室朱朝文、吴维有、葛慧中、 柳炳恒、何于闫 蒋益兴 1 1 常州大学怀德学院11 智能黑板及粉笔收纳盒周金彪、李凯尚、陈伟、 浦鸣杰、王靖 刘善淑11 常州工程职业技术 学院 123 教室用新型课桌仇洋洋、贾媛媛、张波、 胡祖华、王彬 王鑫铝、陈保国11 空调器节能改进设计董谦、张钦杜存臣 1 1 旋转的课桌仇雷、刘悦、倪永健、邵 鹏、许涛 邱国仙、夏晓平 1 1 常州工学院1427 齿轮中心距可分性验证仪姚成、吉志凯、彭锐、李 玉蓉 毛建秋、周叙荣11 多功能讲台刘雷、司春迎、张龙佳、 蒋晓宇 田文彤、杨辉 1 1 滚动式白板夏佳伟、周士康、赵剑、 姚建冲 周叙荣、毛建秋 1 1 利用钟表传动机构可连续 摆动的婴儿床 万振华、张慧、王帅田文彤、杨辉 1 1 魔方复原机器人戴作健、王一、孙德富杨名利 1 1 全机械手动式病人转运车唐相浩、李杨、刘加南田文彤、杨辉 1 1 一种应用微电流检测技术 的数字化机外对刀仪 马帅、吕游、赵凯强刘春节、夏任波 1 1 常州信息职业技术 学院 11 一种可折叠式桌椅赵启航、侯梦溪、李晓、 王磊 莫盛秋、王桂林11 东南大学3115橄榄球式可折叠车轮史昀珂、蒋祖贵、季凡钱瑞明11 蓝牙控气动爬壁机器人王超、吴景、周昊、耿垭钱瑞明、许映秋 1 1
2019 年全国大学生电子设计竞赛综合测评题 综合测评注意事项 (1)综合测评于2019 年8 月19 日8:00 正式开始,8 月19 日15 :00 结束。 (2)本科组和高职高专组优秀参赛队共用此题。 (3)综合测评以队为单位采用全封闭方式进行,现场不能上网、不能使用手机。 (4)综合测评结束时,制作的实物及《综合测评测试记录与评分表》由全国专家组委派的专家封存, 交赛区保管。 多信号发生器 使用题目制定综合测评板上的一片LM324AD(四运放)和一片SN74LS00D(四与非门)芯片设计制作一个多路信号发生器,如下图所示。 设计报告应给出方案设计、详细电路图、参数计算和现场自测数据波形(一律手写),综合测评板 编号及 3 个参赛同学签字需在密封线内,限 2 页,与综合测评板一同上交。 u o1 u o2 多信号发生器u o3 1kΩ 19kHz-21kHz (含LM324AD 四运放,U o41kΩ 负载 1kΩ 负载 负载 +5V SN74LS00D四与非门) 1kΩ 负载 U o1————方波 U o2————占空比连续可调窄脉冲 U o3————正弦波 U o4————余弦波 一.约束条件 1. 一片SN74L.S0OD四与非门芯片(综合测评板上自带); 2. 一片LM324AD四运算放大器芯片(综合测评板上自带); 3. 赛区提供固定电阻、固定电容、可变电阻元件(数量不限、参数不限); 4. 赛区提供直流电源。 二.设计任务及指标要求 利用综合测评板和若干电阻、电容元件,设计制作电路产生下列四路信号: 1. 频率为19kHz~2IkHz 连续可调的方波脉冲信号,幅度不小于 3.2V; 2. 与方波同频率的正弦波信号,输出电压失真度不大于5%,峰-峰值(Vpp)不小于1V; 3. 与方波同频率占空比5%~15%连续可调的窄脉冲信号,幅度不小于 3.2V;
全国大学生电子设计大 赛作品报告 Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT
2015年全国大学生电子设计竞赛 多旋翼自主飞行器(c题) 2015 年8月15 日 摘要 旋多翼自主飞行器由RL78/G13MCU板(芯片型号R5F100 LEA),STM32单片机模块(加SD卡),CMOS摄像头,A2212/13T新西达电机。STM32单片机输入信号到RL78/G13MCU板,启动飞行器和CMOS摄像模块,RL78/G13MCU飞控模块矫正飞行器在空中的姿态,实现悬停,前进,后退等功能,CMOS模块将拍摄的视频内容存储在STM32模块内置的SD卡里。当飞行到目的地时各模块自动停止工作。 飞行器能一键式启动,并开始航拍,从A点起飞,飞向B区,在B区降落,但不是中心,当飞行结束后,拔掉SD卡,能顺利的通过P0机回放,在飞行过程中,始终在电子示高线H1和H2的区间内。 目录 目录
1. 方案论证与比较 四旋翼算法方案 方案一:采用欧拉角法欧拉角法静止状态,或者总加速度只是稍微大于g 时,由加计算出的值比较准确。 使用欧拉角表示姿态,令Φ,θ和Φ代表ZYX 欧拉角,分别称为偏航角、俯仰角和横滚角 。 载体坐标系下的 加 速 度(axB,ayB,azB)和参考坐标系下的加速度(axN, ayN, azN)之间的关系可表示为(1)。其中 c 和 s 分别代表 cos 和 sin 。axB,ayB,azB 就是mpu 读出来的三个值。 这个矩阵就是三个旋转矩阵相乘得到的,因为矩阵的乘法可以表示旋转。 axB c c c s s axN ayB c s s s c c c s s s s c ayN azB s s c s c s c c s s c c azN θψθψθφψφθψφψφθψφθφψφθψφψφθψφθ-??? ?????????=-++????????????+-+?????? (1) 飞行器处于静止状态,此时参考系下的加速度等于重力加速度,即 00xN yN zN a a g a ????????=???????????? (2) 把(2)代入(1)可以解 : arctg θ= (3) yB zB a arctg a φ??= ? ?? (4) 即为初始俯仰角和横滚角,通过加速度计得到载体坐标系下的加速度即可将其解出,偏航角可以通过电子罗盘求出。 方案二:四元数法(通过处理单位采样时间内的角增量(mpu 的陀螺仪得到的就是角增量),为了避免噪声的微分放大,应该直接用角增量-------抄的书) 本项目采用的是方案一。 STM32控制方案 方案一: 直接激活飞控模块(RL78/G13MCU ),可以很好的与飞控进行协调,实现飞控模块的启动与停止。 方案二:使用STM32直接控制飞行器飞行。在植入的程序里包含对四旋翼的控制算法和自启动和自停止,还有视频模块的处理,但太过复杂。